Playlists
Playlist of all videos with the BeagleBoard &
fischertechnik camera (12-2020 - present)
Playlist
of all videos with the BeagleBoard & fischertechnik
rollertrack (10-2018 - 11-2020 (for now))
Playlist
of all videos with the BeagleBoard & fischertechnik
track/rails (6-2016 - 10-2018)
Playlist
of all videos with the BeagleBoard & OpenCV (12-2015 - 6-2016)
Playlist
of all 2 videos with the BeagleBoard introduction
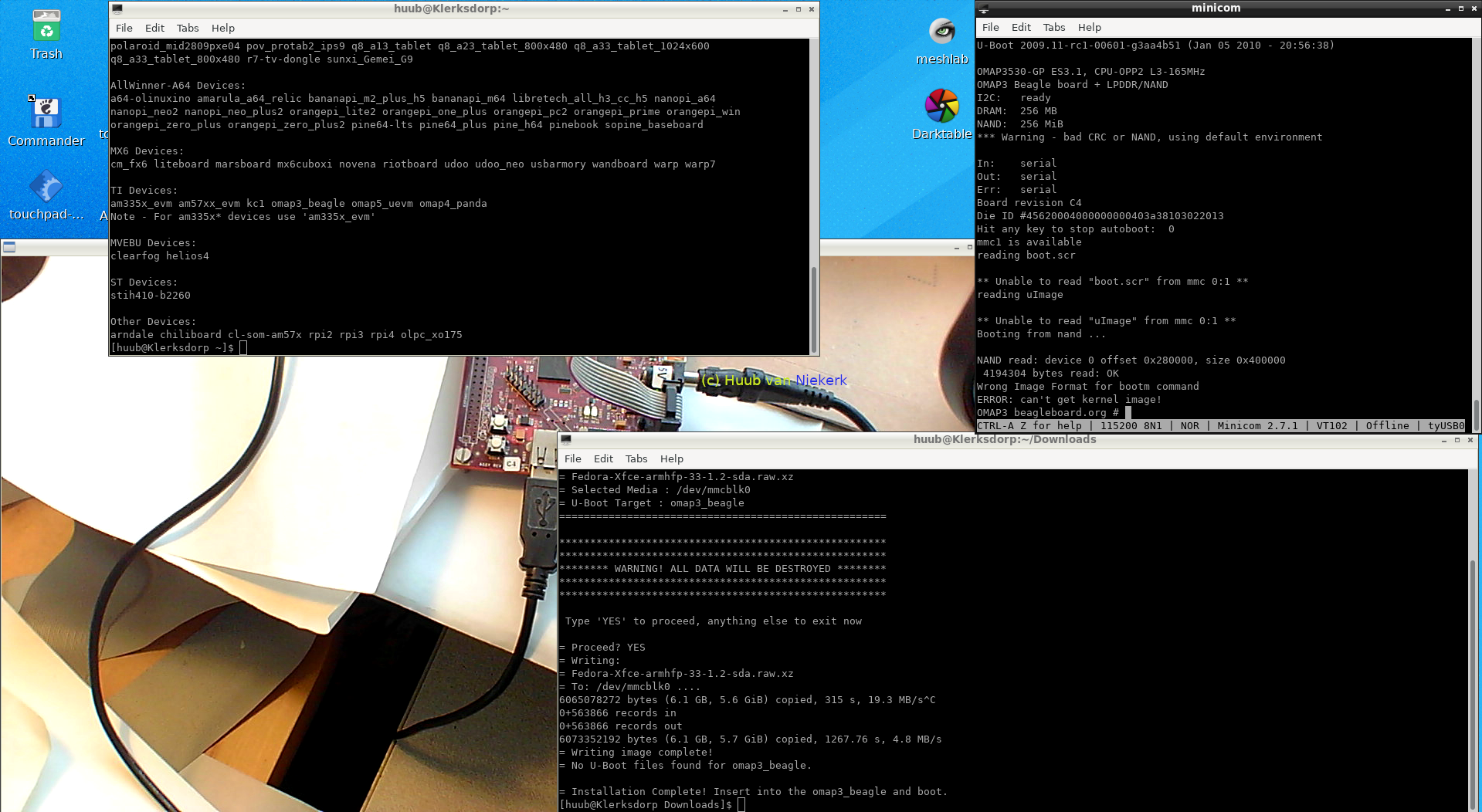
26 February 2021: Intro, Ubuntu,
Fedora, FVWM, dd, minicom, oops. Click the image to watch the
video. See also the
blog.
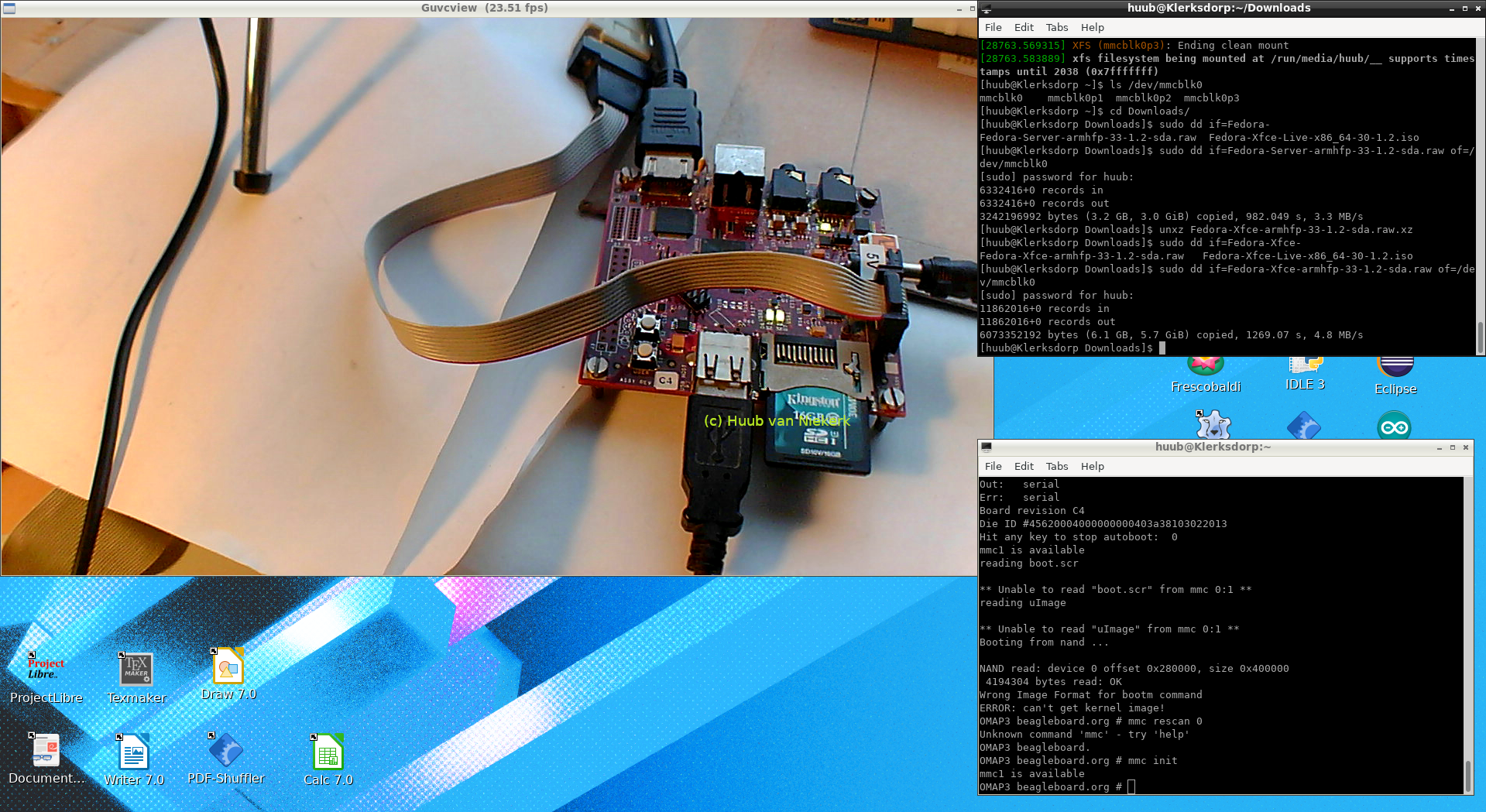
 5 February 2021:
5 February 2021: Intro, Ubuntu, Fedora, FVWM, dd, minicom,
oops. Click the image to watch the video. See also the
blog.
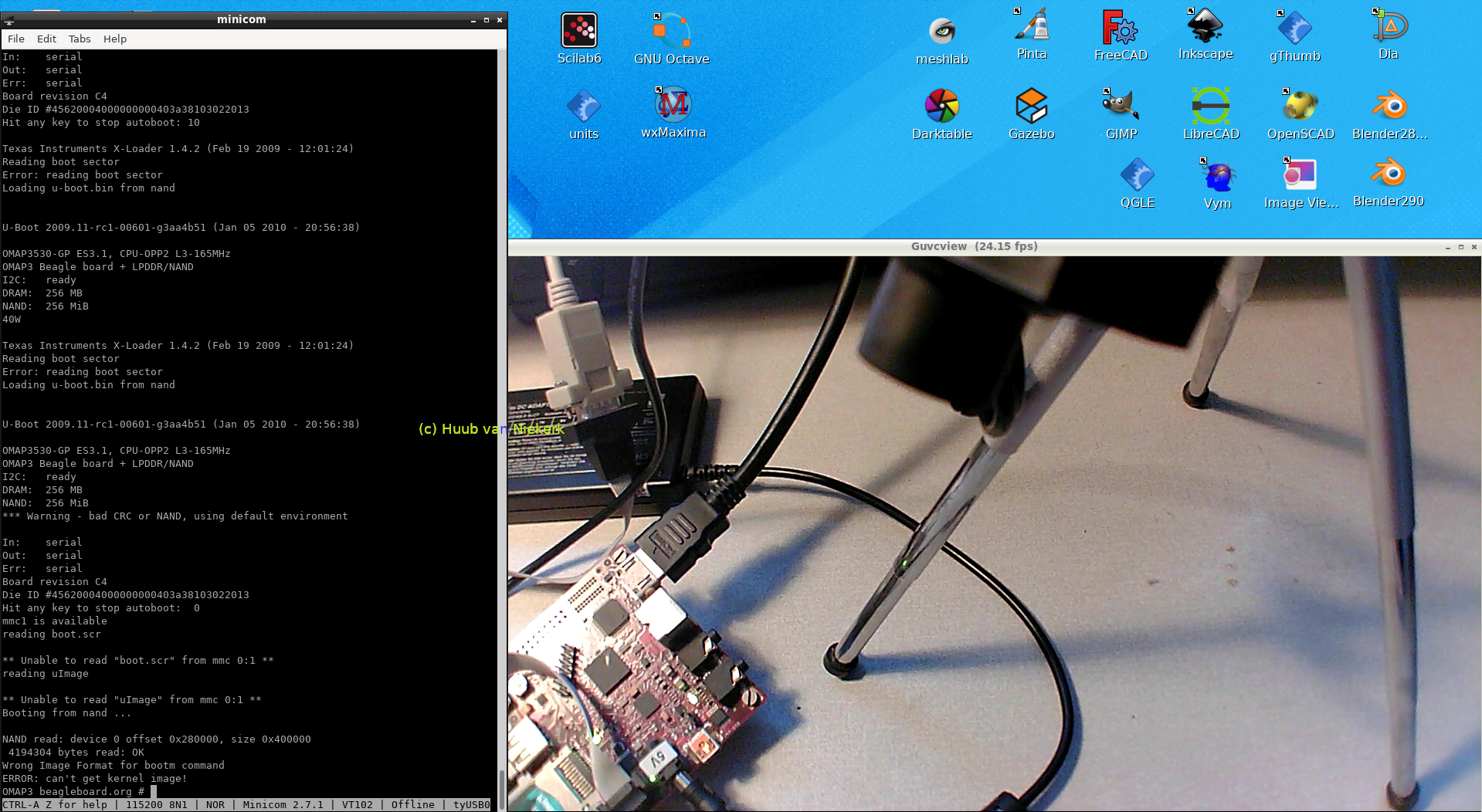
 15 January 2021:
15 January 2021: Intro, Ubuntu, Fedora, FVWM, dd, minicom,
oops. Click the image to watch the video. See also the
blog.
----------------------------------------------------------------------
2020
----------------------------------------------------------------------------
25 December 2020: Intro, connection, guvcview, cheese,
network, Linux. Click the image to watch the video. See also the
blog.
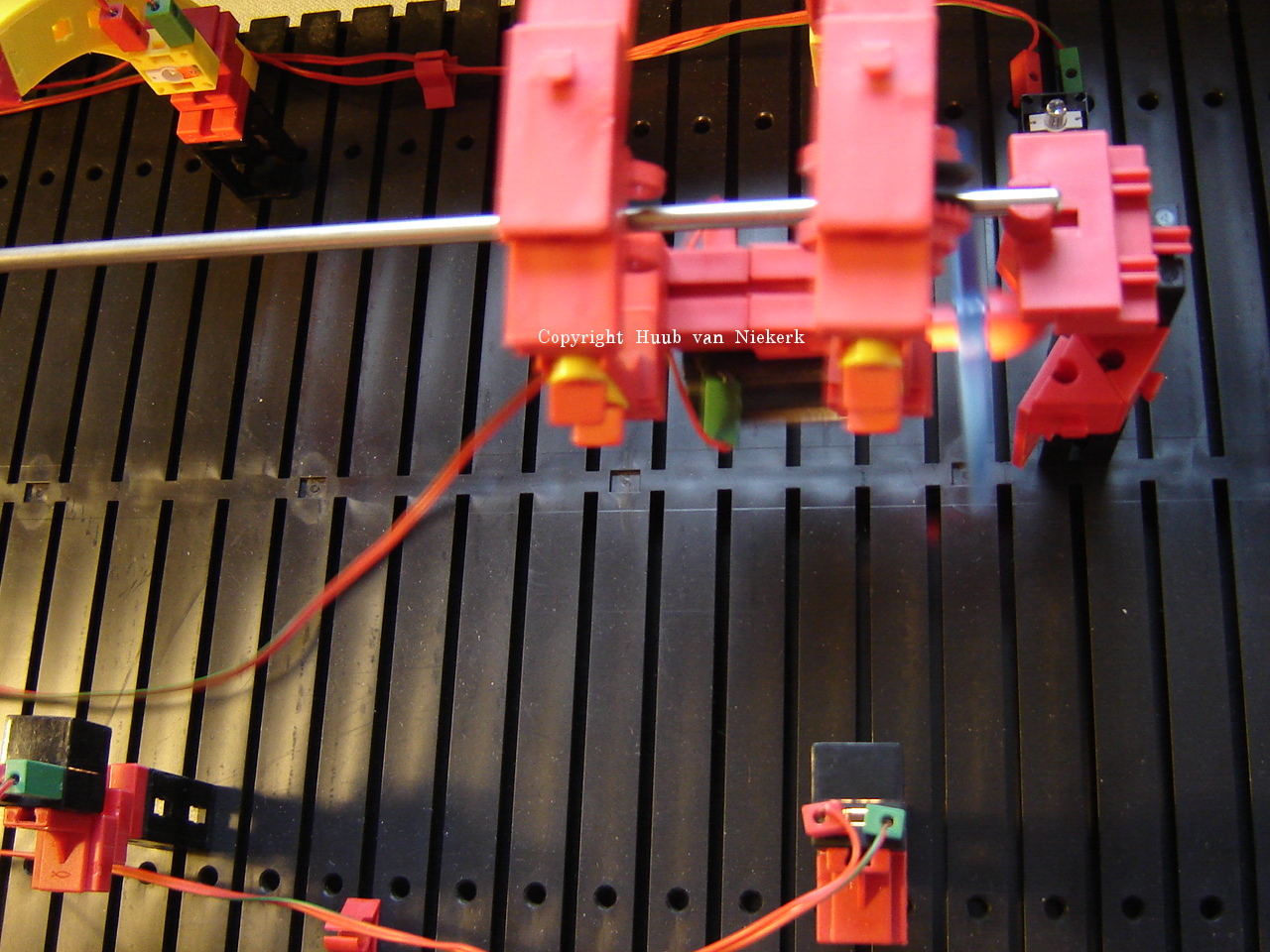
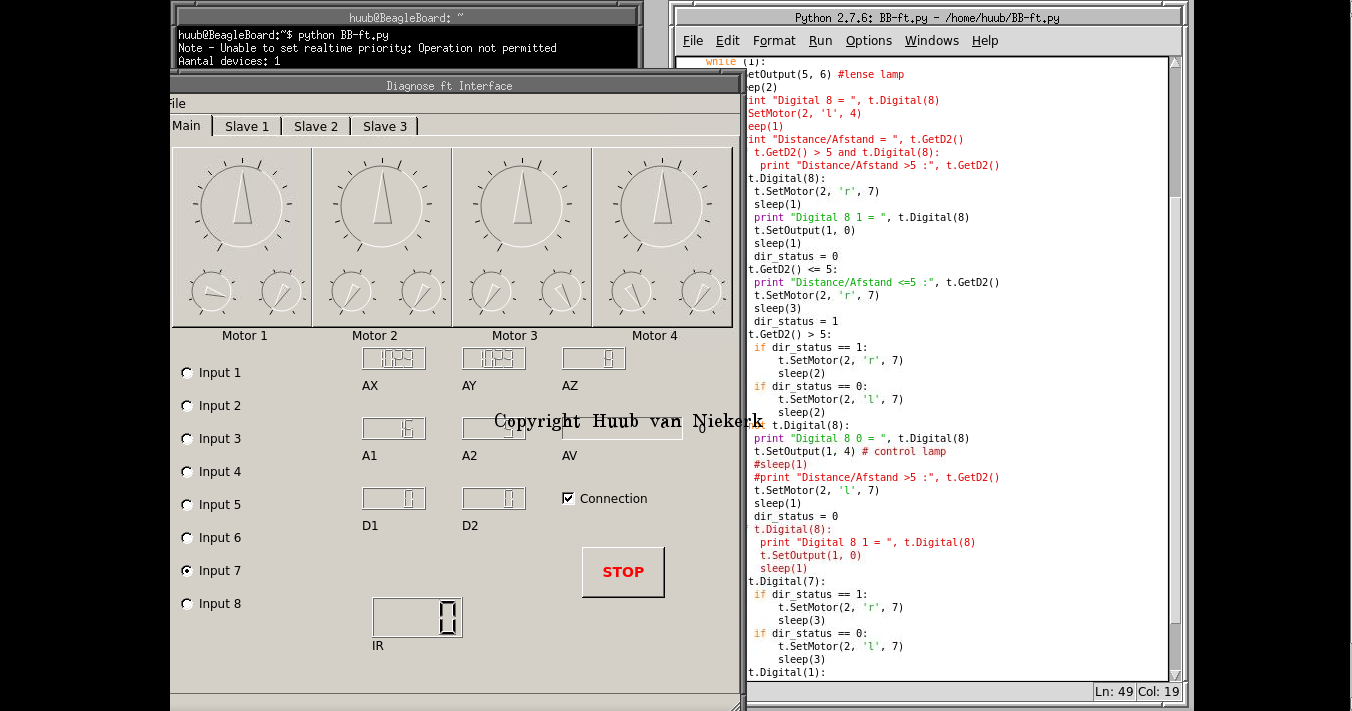
 4 December:
4 December: Intro, conveyor, ftdiagnose, wiring, Python,
test. Click the image to watch the video. See also the
blog.
 13 November:
13 November: Intro, reconstruction, Python, conveyor,
testing. Click the image to watch the video. See also the
blog.
 23 October:
23 October: Intro, track reconstruction, Python, speed,
more. Click the image to watch the video. See also the
blog.
2 October: Intro, trackselection, Python, ftdiagnose, more.
Click the image to watch the video. See also the
blog.
 11 September:
11 September: Intro, reconstruction, chain, speed, test,
oops. Click the image to watch the video. See also the
blog.
 21 August:
21 August: Intro, reconstruction, chain, speed, test, oops.
Click the image to watch the video. See also the
blog.
 31 July:
31 July: Intro, magnet chain, reconstruction,
stabilization. Click the image to watch the video. See also the
blog.
 10 July:
10 July: Intro, magnet chain, reconstruction,
stabilization. Click the image to watch the video. See also the
blog.
 21 June:
21 June: Intro, cardan joint, reconstruction, motor, more.
Click the image to watch the video. See also the
blog.
 22 May:
22 May: Intro, cardan joint, reconstruction, motor, more.
Click the image to watch the video. See also the
blog.
 8 May:
8 May: Intro, cardan joints, reconstruction, conveyorbelt.
Click the image to watch the video. See also the
blog.
 17 April:
17 April: Intro, conveyorbelts, reconstructions, test,
more. Click the image to watch the video. See also the
blog.
 27 March:
27 March: Intro, conveyorbelts, reconstructions, test,
more. Click the image to watch the video. See also the
blog.
 6 March:
6 March: Intro, conveyorbelt, reconstruction, wiring, test.
Click the image to watch the video. See also the
blog.
 7 February:
7 February: Intro, motor, conveyorbelt, reconstruction,
more. Click the image to watch the video. See also the
blog.
 17 January 2020:
17 January 2020: Intro, motor, belt, wiring,
reconstruction, more. Click the image to watch the video. See also
the
blog.
-----------------------------------------------------------------------
2019
----------------------------------------------------------------------------
27 December 2019: Intro, test, modification, Python, oops,
belt. Click the image to watch the video. See also the
blog.
 6 December:
6 December: Intro, test, track, reconstruction, Python,
oops. Click the image to watch the video. See also the
blog.
 15 November:
15 November: Intro, monitor, Python, chain, reconstruction,
track. Click the image to watch the video. See also the
blog.
 18 October:
18 October: Intro, monitor/keyboard/mouse, Python, speed.
Click the image to watch the video. See also the
blog.
 19 September:
19 September: Intro, trajectory, angle reconstruction,
Python. Click the image to watch the video. See also the
blog.
 6 September:
6 September: Intro, testing, Python, angle & curve
reconstruction. Click the image to watch the video. See also the
blog.
 16 August:
16 August: Intro, testing, looping & curve
reconstruction. Click the image to watch the video. See also the
blog.
 02 August:
02 August: Intro, testing, Python, trajectory, altitude,
chain. Click the image to watch the video. See also the
blog.
 19 July:
19 July: Intro, test, Python, reconstruction, diagnose,
more. Click the image to watch the video. See also the
blog.
 12 July:
12 July: Intro, chain, reconstruction, Python, test, oops.
Click the image to watch the video. See also the
blog.
 5 July:
5 July: Intro, switch, trajectory, modifications, Python,
oops. Click the image to watch the video. See also the
blog.
 28 June:
28 June: Intro, LEDs, switch, wormgear, reconstruction,
more. Click the image to watch the video. See also the
blog.
 21 June:
21 June: Intro, modification, trajectory, diagnose, Python,
LEDs. Click the image to watch the video. See also the
blog.
 14 June:
14 June: Reconstruction, modification, trajectory, more.
Click the image to watch the video. See also the
blog.
 7 June:
7 June: Reconstruction, trajectory, chain, magnet, more.
Click the image to watch the video. See also the
blog.
 31 May:
31 May: Intro, RS232, network, reconstruction, trajectory.
Click the image to watch the video. See also the
blog.
 24 May:
24 May: Intro, rewiring, chain, gearbox, diagnose, Python.
Click the image to watch the video. See also the
blog.
 10 May:
10 May: Intro, reconstruction, chain, magnet, switch,
track. Click the image to watch the video. See also the
blog.
 03 May:
03 May: Intro, modification, screwpump, chain, test,
switch. Click the image to watch the video. See also the
blog.
 26 April:
26 April: Intro, elevation, screwpump, test, oops. Click
the image to watch the video. See also the
blog.
 12 April:
12 April: Intro, reconstruction, wormgear, curve, parts,
oops. Click the image to watch the video. See also the
blog.
 5 April:
5 April: Test, magnet, modification, track end, curve,
Python. Click the image to watch the video. See also the
blog.
 27 March:
27 March: Test, start, magnet, reconstruction, looping,
more. Click the image to watch the video. See also the
blog.
 22 March:
22 March: Test, looping, curve, reconstruction,
Python, more. Click the image to watch the video. See also the
blog.
 15 March:
15 March: Test, curve, distance, looping, reconstruction,
more. Click the image to watch the video. See also the
blog.
 8 March:
8 March: Switches, reconstruction, diagnose, Python,
magnet, oops. Click the image to watch the video. See also the
blog.
 1 March:
1 March: Switches, gears, reconstruction, diagnose,
looping. Click the image to watch the video. See also the
blog.
 22 February:
22 February: Looping, reconstruction, switches, gears,
diagnose. Click the image to watch the video. See also the
blog.
 15 February:
15 February: Switches, diagnose, oops, looping,
reconstruction. Click the image to watch the video. See also the
blog.
 1 February
1 February Switches, modification, diagnose, Python, oops,
more. Click the image to watch the video. See also the
blog.
 25 January:
25 January: Switches, Python, reconstruction, trajectory,
more. Click the image to watch the video. See also the
blog.
 18 January:
18 January: Switches, motor, Python, modifications, oops.
Click the image to watch the video. See also the
blog.
 11 January:
11 January: Overview, switches, Python, reconstruction,
more. Click the image to watch the video. See also the
blog.
 4 January 2019:
4 January 2019: Switches, diagnose, Python, reconstruction,
more. Click the image to watch the video. See also the
blog.
-----------------------------------------------------------------------
2018
----------------------------------------------------------------------------
28 December 2018: Switch, diagnose, Python, reconstruction,
trajectory. Click the image to watch the video. See also the
blog.
 21 December:
21 December: Reconstruction, trajectory, looping, energy,
more. Click the image to watch the video. See also the
blog.
 7 December:
7 December: Reconstruction, chain, magnet, ball,
trajectory, more. Click the image to watch the video. See also the
blog.
 30 November:
30 November: Reconstruction, chain, ball, VNC, connection,
more. Click the image to watch the video. See also the
blog.
 23 November:
23 November: Reconstruction, chain, tension, robustness,
Android. Click the image to watch the video. See also the
blog.
 9 November:
9 November: Rollertrack, reconstruction, motor, direction,
more. Click the image to watch the video. See also the
blog.
 26 October:
26 October: First experiment with the rollertrack:
construction, motor, chain, ball, more. Click the image to watch
the video. See also the
blog.
 19 October:
19 October: Final experiment with the monorail: carriage,
cord, tension, motor, speed, sensor, oops. Click the image to
watch the video. See also the
blog.
 12 October:
12 October: Carriage, tension, motor, speed, lamp,
modification. Click the image to watch the video. See also the
blog.
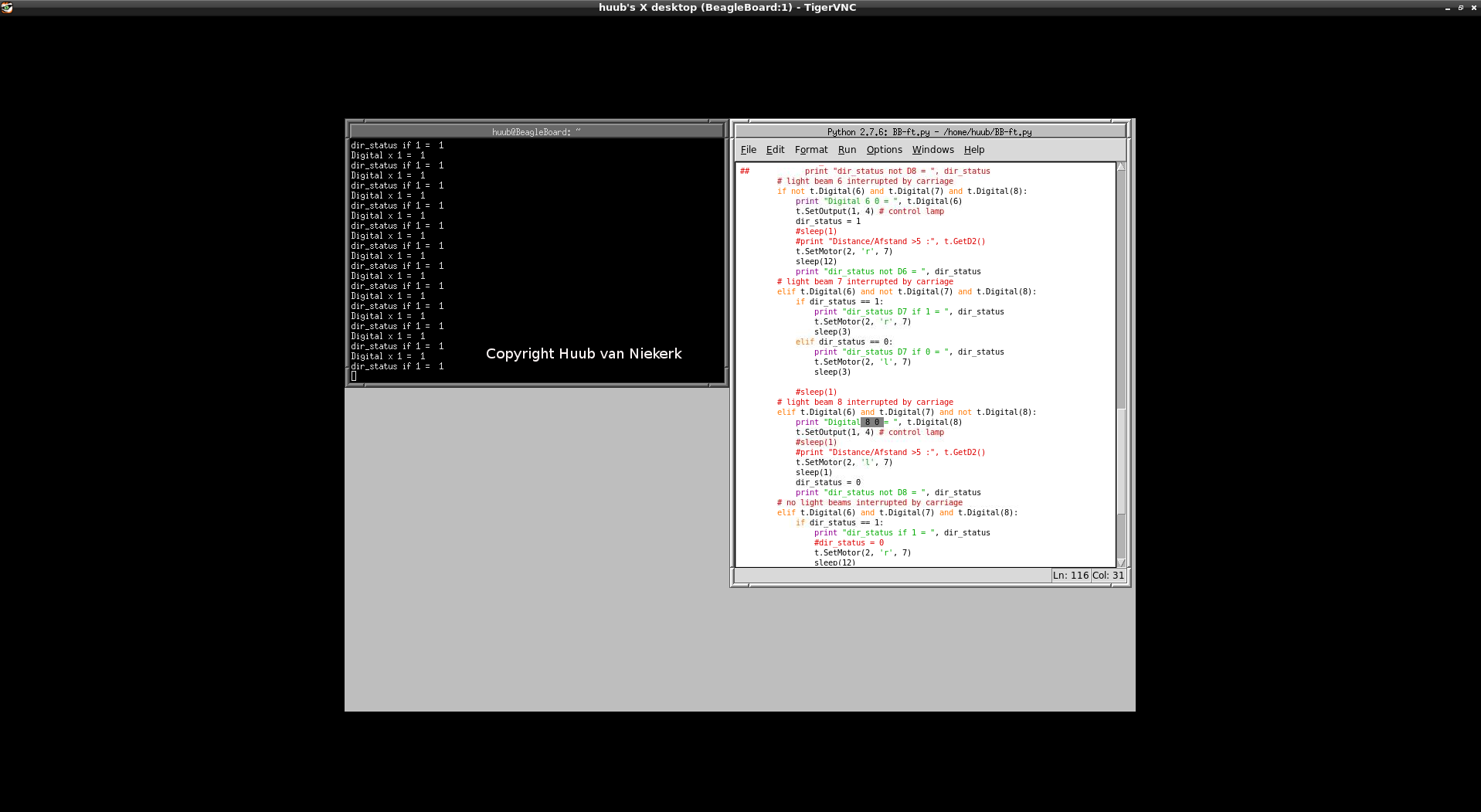
 5 October:
5 October: Lamps, diagnose, Python, direction, analysis,
testing. Click the image to watch the video. See also the
blog.
 21 September:
21 September: Testing, lamp, diagnose, modification,
wiring, more. Click the image to watch the video. See also the
blog.
 14 September:
14 September: Modification, wiring, lamp, Python,
direction, oops, more. Click the image to watch the video. See
also the
blog.
 7 September:
7 September: Reconstruction, modification, rewiring,
Python, more. Click the image to watch the video. See also the
blog.
 31 August:
31 August: Diagnose, rewiring, motor, analysis, Python,
more. Click the image to watch the video. See also the
blog.
 24 August:
24 August: Replacement, reconstruction, analysis, Python,
diagnose. Click the image to watch the video. See also the
blog.
 17 August:
17 August: Reconstruction, analysis, Python, diagnose,
plan, more. Click the image to watch the video. See also the
blog.
 10 August:
10 August: Analysis, wiring, Python, diagnose, alternative,
plan. Click the image to watch the video. See also the
blog.
 3 August:
3 August: Modifications, wiring, Python, diagnose,
direction, more. Click the image to watch the video. See also the
blog.
 27 July:
27 July: Reconstruction, direction, Python, diagnose, more.
Click the image to watch the video. See also the
blog.
 20 July:
20 July: Reconstruction, analysis, direction, speed,
Python, more. Click the image to watch the video. See also the
blog.
 13 July:
13 July: Modification, rewiring, analysis, direction,
speed, more. Click the image to watch the video. See also the
blog.
 6 July:
6 July: Reconstruction, analysis, oscilloscope, direction,
speed. Click the image to watch the video. See also the
blog.
 29 June:
29 June: Reconstruction, analysis, weight, oscilloscope,
more. Click the image to watch the video. See also the
blog.
 22 June:
22 June: Location, analysis, oscilloscope, HDMI, direction,
plan. Click the image to watch the video. See also the
blog.
 15 June:
15 June: Location, analysis, oscilloscope, modification,
direction. Click the image to watch the video. See also the
blog.
 8 June:
8 June: Connection, power, oops, location, analysis,
modification. Click the image to watch the video. See also the
blog.
 1 June:
1 June: Networking, location, analysis, modification, more.
Click the image to watch the video. See also the
blog.
 25 May:
25 May: Location, Python, diagnose, analysis, oscilloscope,
more. Click the image to watch the video. See also the
blog.
 18 May:
18 May: Location, roll, Python, diagnose, distance, wiring,
more. Click the image to watch the video. See also the
blog.
 11 May:
11 May: Roller, connection, wiring, oscilloscope, Python,
more. Click the image to watch the video. See also the
blog.
 4 May:
4 May: HDMI, roller, connection, wiring, oscilloscope,
more. Click the image to watch the video. See also the
blog.
 27 April:
27 April: Speed, Python, oscilloscope, direction, diagnose,
wiring. Click the image to watch the video. See also the
blog.
 20 April:
20 April: Speed, Python, oscilloscope, direction, signal,
more. Click the image to watch the video. See also the
blog.
 13 April:
13 April: Speed, Python, oscilloscope, reverse, diagnose,
more. Click the image to watch the video. See also the
blog.
 6 April:
6 April: Speed, modification, Python, oscilloscope, oops,
reverse. Click the image to watch the video. See also the
blog.
 30 March:
30 March: Speed, wheels, alignment, friction, Python,
diagnose, more. Click the image to watch the video. See also the
blog.
 23 March:
23 March: Reconstruction, grease, speed, oscilloscope,
Python, more. Click the image to watch the video. See also the
blog.
 9 March:
9 March: Reconstruction, balance, speed, oscilloscope,
more. Click the image to watch the video. See also the
blog.
 2 March:
2 March: Reconstruction, balance, speed, oscilloscope,
more. Click the image to watch the video. See also the
blog.
 23 February:
23 February: Balance, modification, speed, oscilloscope,
speed, Python. Click the image to watch the video. See also the
blog.
 16 February:
16 February: Width, modification, reconstruction, speed and
more. Click the image to watch the video. See also the
blog.
 9 February:
9 February: Tracks, width, modification, balance, speed,
oscilloscope. Click the image to watch the video. See also the
blog.
 2 February:
2 February: Rewiring, reconnection, balance, pressure,
speed, more. Click the image to watch the video. See also the
blog.
 26 January:
26 January: Reconstuction, diagnose, wiring, balance,
speed, Python. Click the imageto watch teh video. See also the
blog.
 19 January:
19 January: Speed, diagnose, modification, wheels, balance,
Python. Click the image to watch the video. See also the
blog.
 12 January:
12 January: Test, balance, wheels, modification, wiring,
oscilloscope. Click the image to watch the video. See also the
blog.
 5 January 2018:
5 January 2018: Carriage, reconstruction, wiring,
alignment, Python, test. Click the image to watch the video. See
also the
blog.
-----------------------------------------------------------------------
2017
----------------------------------------------------------------------------
29 December 2017: Carriage, sensors, wiring, Python,
diagnose, alignment. Click the image to watch the video. See also
the
blog.
 22 December:
22 December: Carriage, reconstruction, sensor, wiring,
Python, speed. Click the image to watch the video. See also the
blog.
 15 December:
15 December:Carriage, wheels, alignment, reconstruction,
speed. Click the image to watch the video. See also the
blog.
 8 December:
8 December: Pwm, Python, diagnose, carriage, speed,
connection, oops. Click the image to watch the video. See also the
blog.
 1 December:
1 December: Pwm, Python, diagnose, wiring, carriage, angle,
3rd wheel. Click the image to watch the video. See also the
blog.
 24 November:
24 November: Carriage, reconstruction, angle, wheels,
ground, Python. Click the image to watch the video. See also the
blog.
 17 November:
17 November: Carriage, wheels, ground, derailment, Python,
reconstruction. Click the image to watch the video. See also the
blog.
 10 November:
10 November: Carriage, wheels, ground, derailment,
diagnose, Python. Click the image to watch the video. See also the
blog.
 27 October:
27 October: Diagnose, Python, reconstruction, wheels,
oscilloscope. Click the image to watch the video. See also the
blog.
 20 October:
20 October: Diagnose, Python, power, connection,
oscilloscope, weird. Click the image to watch the video. See also
the
blog.
 13 October:
13 October: Diagnose, Python, power, connection,
oscilloscope, speed. Click the image to watch the video. See also
the
blog.
 6 October:
6 October: Diagnose, Python, gEDA, connection, threading,
speed. Click the image to watch the video. See also the
blog.
 15 September:
15 September: Diagnose, Python, connection, movement, oops.
Click the image to watch the video. See also the
blog.
 8 September:
8 September: Carriage, pwm, oscilloscope, timing, diagnose,
Python. Click the image to watch the video. See also the
blog.
 1 September:
1 September: Carriage, pwm, timing, diagnose, oscilloscope,
Python. Click the image to watch the video. See also the
blog.
 25 August:
25 August: Pwm, timing, Python, diagnose, oscilloscope,
speed. Click the image to watch the video. See also the
blog.
 18 August:
18 August: Carriage, oscilloscope, timing, pwm, diagnose.
Click the image to watch the video. See also the
blog.
 11 August:
11 August: Oscilloscope, pwm, timing, connection, oops.
Click the image to watch the video. See also the
blog.
 4 August:
4 August: Oscilloscope, pwm, timing, settings, speed,
questions. Click the image to watch the video. See also the
blog.
 28 July:
28 July: Cameras, oscilloscope, oops, observations. Click
the image to watch the video. See also the
blog.
 21 July:
21 July: Contact, adjustments, speed, observations. Click
the image to watch the video. See also the
blog.
 14 July:
14 July: Tracks, pressure, contact, speed, adjustment.
Click the image to watch the video. See also the
blog.
 7 July:
7 July: Carriage, tracks, contact, pressure, speed. Click
the image to watch the video. See also the
blog.
 30 June:
30 June: Carriage, speed, code, contact, adjustment. Click
the image to watch the video. See also the
blog.
 23 June:
23 June: Carriage, adjustment, code, observations,
questions. Click the image to watch the video.
See also the
blog.
 16 June:
16 June: Carriage, power, reconstruction, friction. Click
the image to watch the video. See also the
blog.
 9 June:
9 June: Carriage, wheels, stability. Click the image to
watch the video. See also the
blog.
 2 June:
2 June: Adjustment, wheels, time, speed. Click the image to
watch the video. See also the
blog.
 26 May:
26 May: Weight, wheels, camera, speed. Click the image to
watch the video. See also the
blog.
 19 May:
19 May: Balance, camera and more. Click the image to watch
the video. See also the
blog.
 12 May:
12 May: Balance, wiring, speed. Click the image to watch
the video. See also the
blog.
 5 May:
5 May: Location, timing, wheels, friction. Click the image
to watch the video. See also the
blog.
 28 April:
28 April: Code, oops, observation, questions. Click the
image to watch the video. See also the
blog.
 21 April:
21 April: Power, oops, software, location. Click the image
to watch the video. See also the
blog.
 14 April:
14 April: Spring, power, wheels, rails. Click the image to
watch the video. See also the
blog.
 7 April:
7 April: Pressure, weight, propeller, contact. Click the
image to watch the video. See also the
blog.
 31 March:
31 March: Code, propeller speed, contact, weight. Click the
image to watch the video. See also the
blog.
 24 March:
24 March: Speed, direction, code, contact. Click the image
to watch the video. See also the
blog.
 17 March:
17 March: Motors, speed, code and more. Click the image to
watch the video. See also the
blog.
 10 March:
10 March: Code, reconstruction, test. Click the image to
watch the video. See also the
blog.
 3 March:
3 March: Wires, motors and Python. Click the image to watch
the video. See also the
blog.
 24 February:
24 February: Power, wires, motor. Click the image to watch
the video. See also the
blog.
 17 February:
17 February: Rails, power and carriage. Click the image to
watch the video. See also the
blog.
 10 February:
10 February: Power, carriage, reconstruction. Click the
image to watch the video. See also the
blog.
 3 February:
3 February: Recoding, carriages, wires. Click the image to
watch the video. See also the
blog.
 27 January:
27 January: Wires, carriages, lamps and more. Click the
image to watch the video.
 20 January:
20 January: Wire, carriage, sonar & spring. Click the
image to watch the video.
 13 January:
13 January: Lamp, wires and code. Click the first image to
watch the video.
 6 January 2017:
6 January 2017: Checking code, some changes and questions.
Click the image to watch the video.
-------------------------------------------------------------------
2016
----------------------------------------------------------------------------------
30 December 2016: Stabilizing new underground, rewiring,
recoding. Click the image to watch the video.
 23 December:
23 December: Replacing the support leads to more replacing,
rewiring and testing. Click the image to watch the video.
 16 December:
16 December: Another reconstruction leads to..... Click the
image to watch the video.
 9 December:
9 December: (Re)construction and coding. Click the image to
watch the video.
 2 December:
2 December: Extra light sensor and rail extension. Click
the image to watch the video.
 25 November:
25 November: Extending rail, checking code and more. Click
the image to watch the video.
 18 November:
18 November: Reconstructions, wires and code. Click the
image to watch the video.
 11 November:
11 November: Sonar, rewiring and reconstruction. Click the
image to watch the video.
 4 November:
4 November: Propeller direction, code and setup. Click the
image to watch the video.
 28 October:
28 October: stability, setup and code. Click the image to
watch the video.
 21 October:
21 October: wiring, speed and more. Click the image to
watch the video.
 14 October:
14 October: sonar wire, motor wire and speed. Click the
image to watch the video.
 22 September:
22 September: wheel direction, some reconstruction and
speed. Click the image to watch the video.
 16 September:
16 September: some stability, length of the track and
location of the sonar. Click the image to watch the video.
 9 September:
9 September: after elevation, it doesn't work as well as it
should. Upside down then? Click the image to watch the video.
 2 September:
2 September: time to elevate the setup. Will it work? Click
the image to watch the video.
 26 August:
26 August: sensors, recoding and light. Click the image to
watch the video.
 19 August:
19 August: Speed, sensors, wiring and light. Click the
image to watch the video.
 12 August:
12 August: Tracks, stability, speed and sensor. Click the
image to watch the video.
 5 August:
5 August: Speed, tracks, stability. Click the image to
watch the video.
 29 July:
29 July: Speed, sensor and stability. Click the image to
watch the video.
 22 July:
22 July: Stability, tracks and speed. Click the image to
watch the video.
 15 July:
15 July: Friction, height, stability and sensor. Click the
image to watch the video.
 8 July:
8 July: Testing and reconstructing. Click the image to see
the video.
 1 July:
1 July: Checking on wired/wireless, code and sensors. Click
the image to see the video.
 24 June:
24 June: Adding a "railway" and another sensor. Click the
image to see the video.
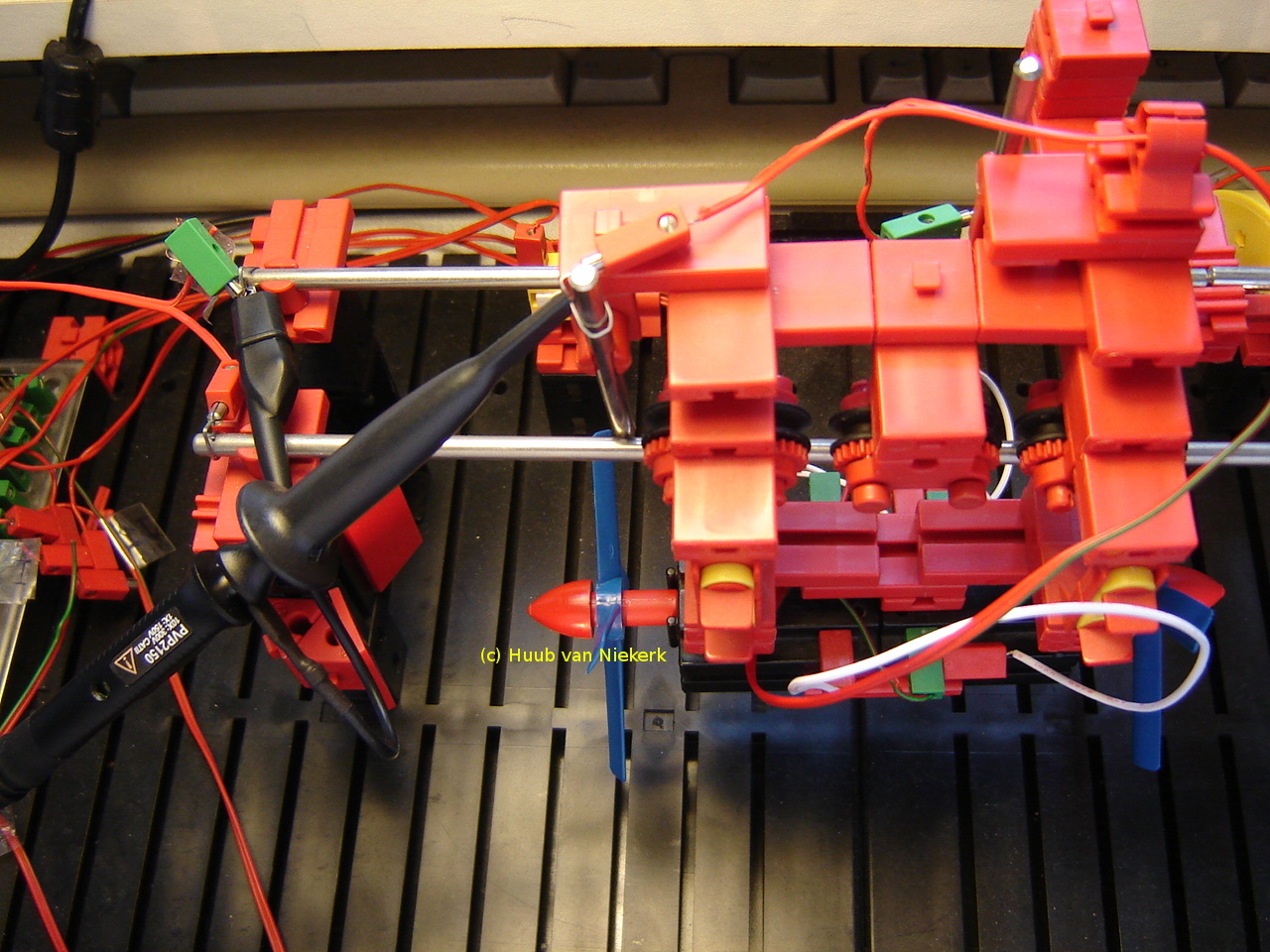
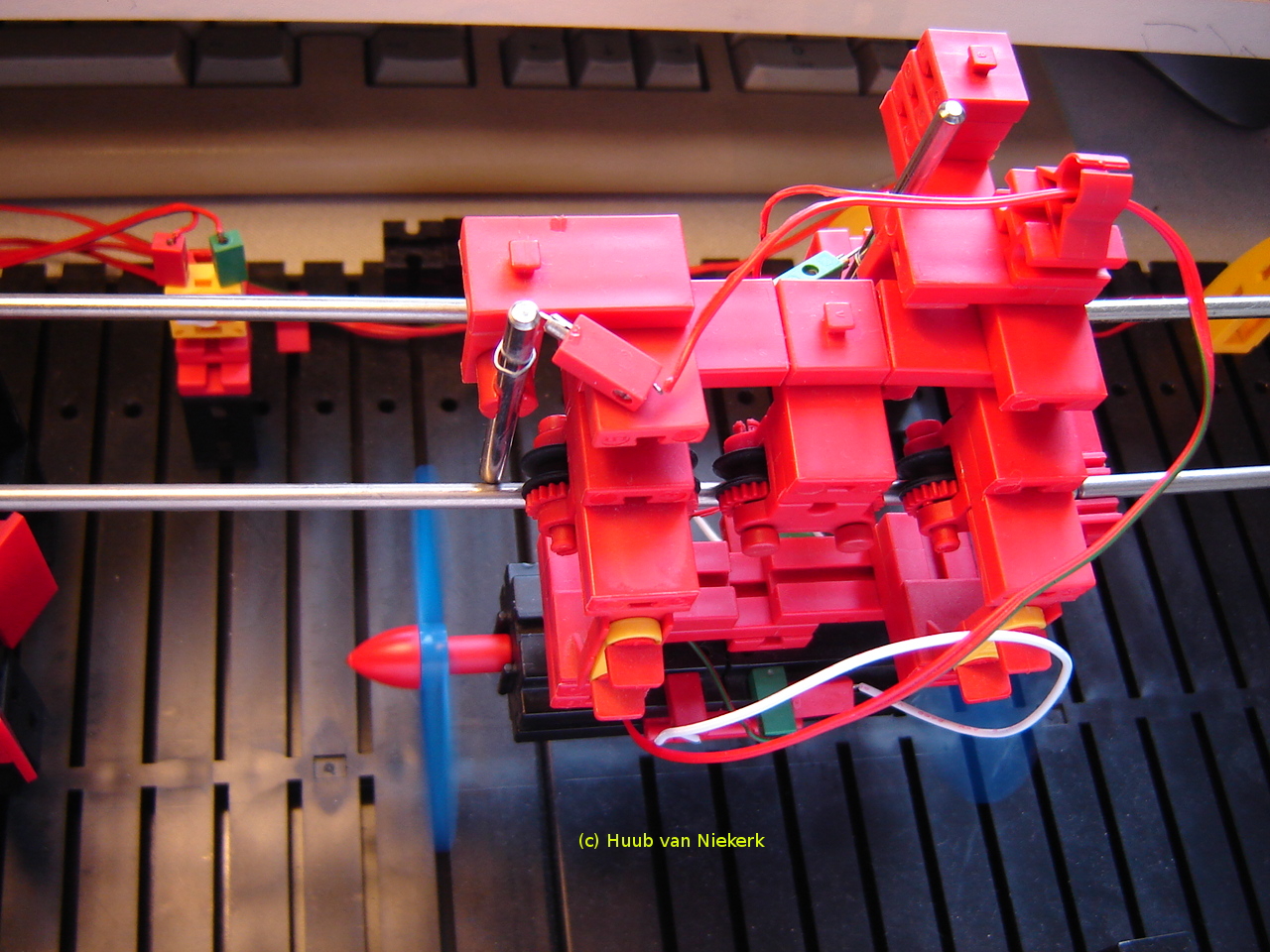
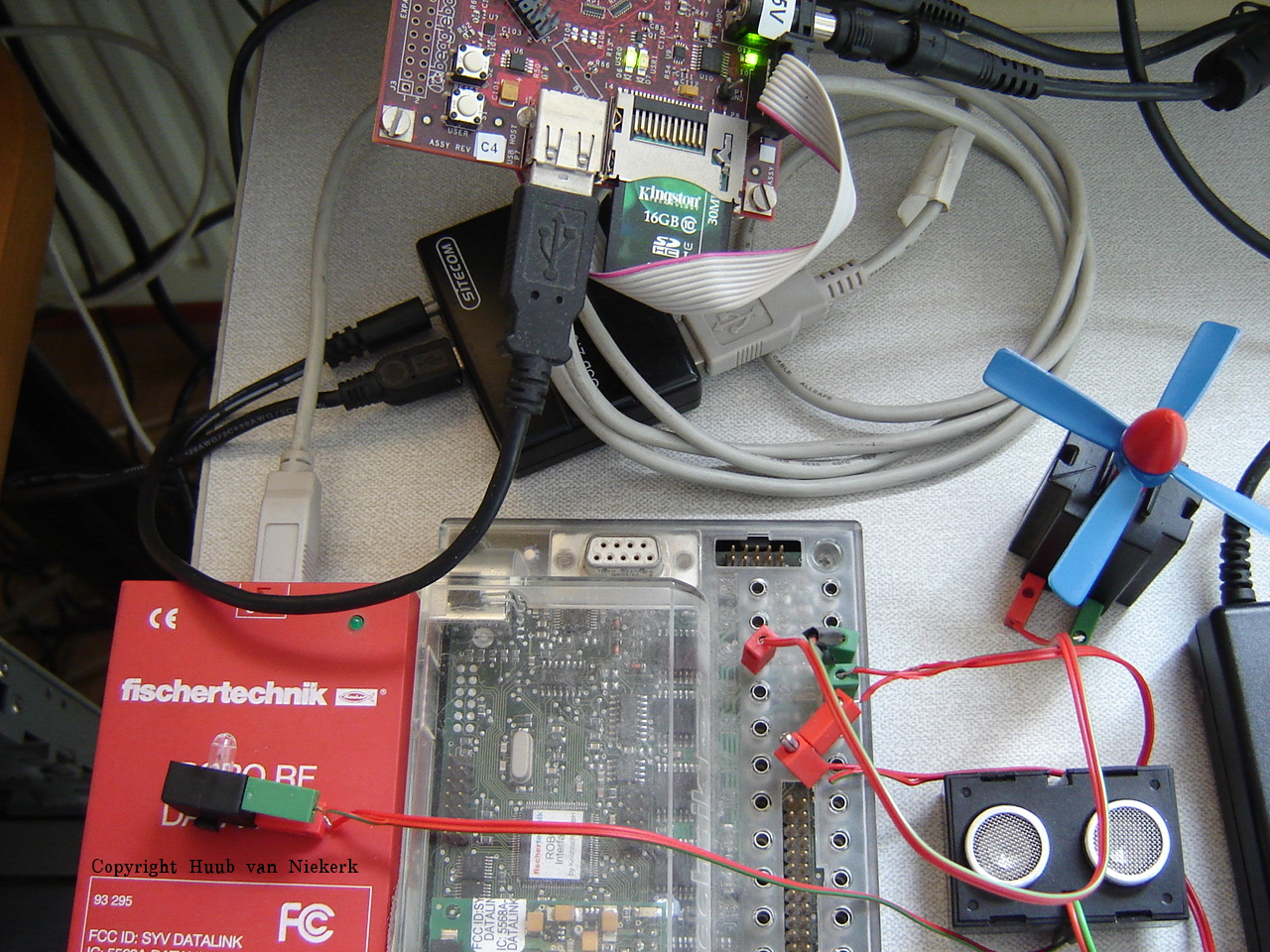
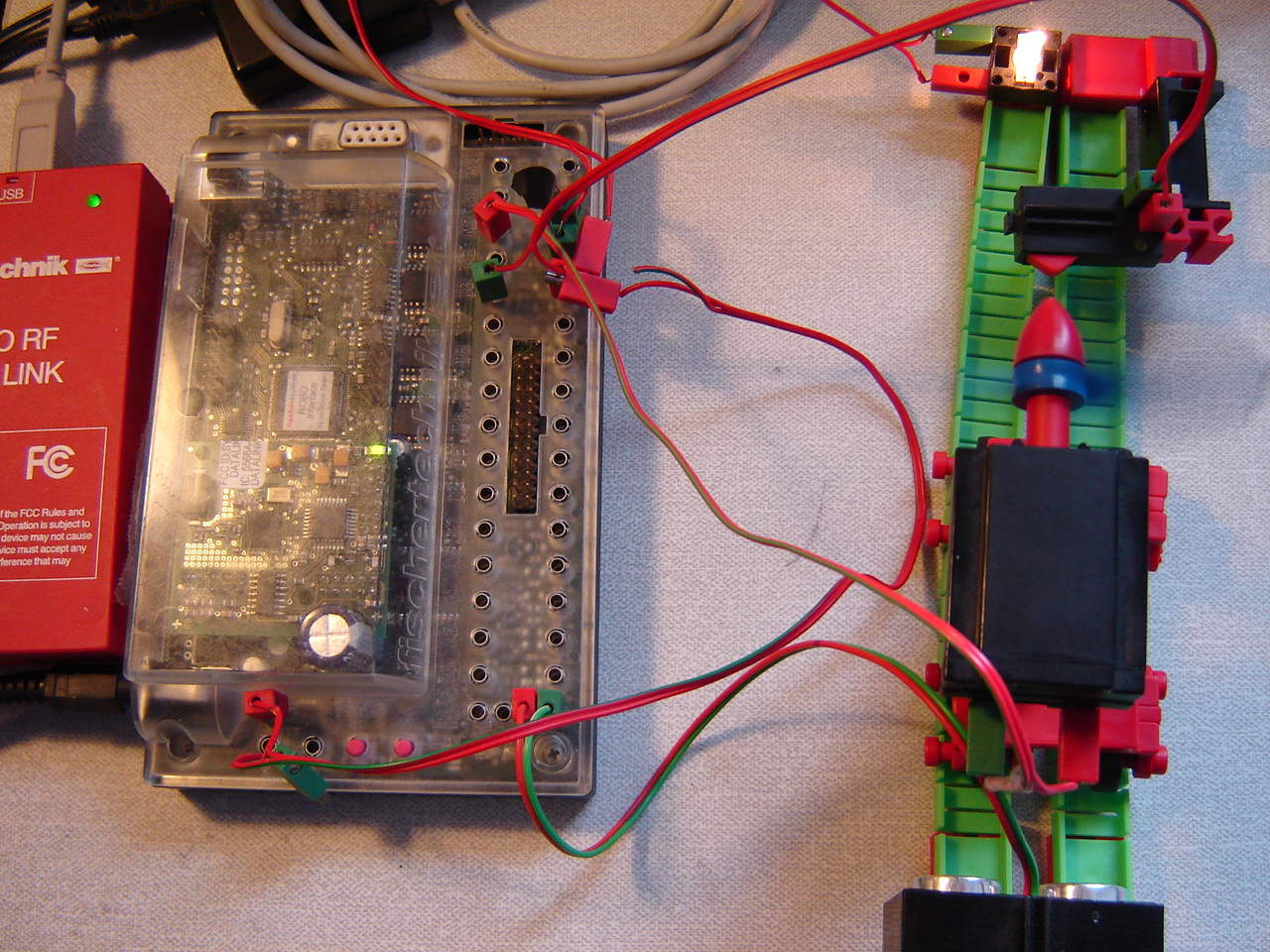 17 June:
17 June: New experiment: using the fischertechnik
RoboInterface. See the
video.
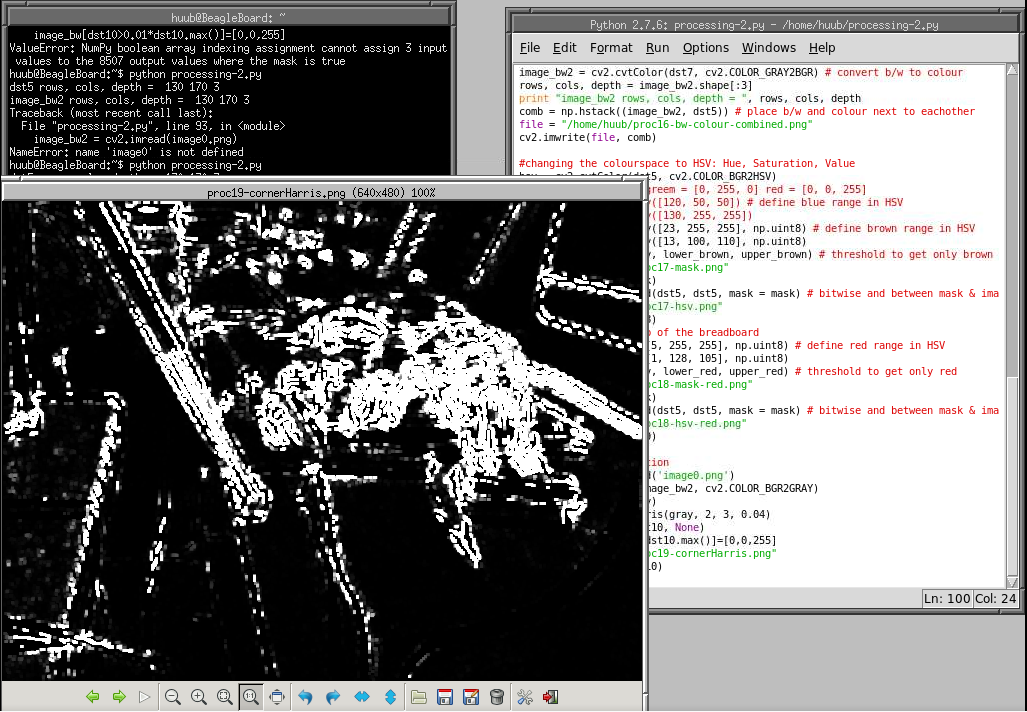
 10 June:
10 June: With Harris corner detection I end the OpenCV for
now. See the
video.
 3 June:
3 June: Using different values, I get this final result.
See the
video.

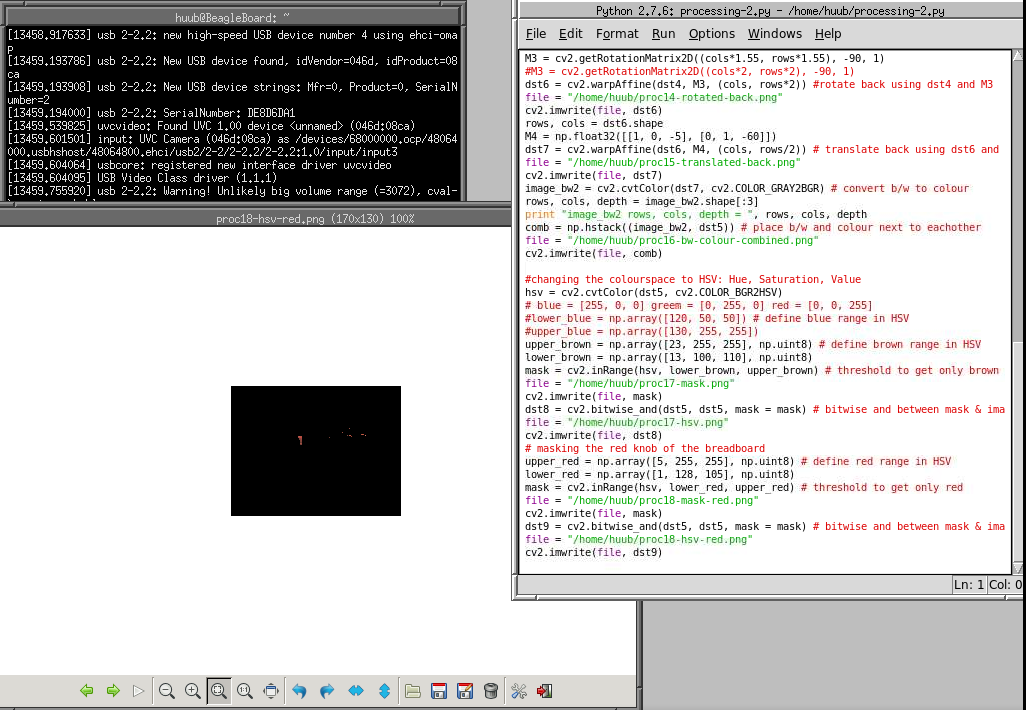 27 May:
27 May: Trying another colour, but with limited results.
See the
video.
 20 May:
20 May: Finally a bit of result. See the
video.
 13 May:
13 May: Back to black?! See the
video.
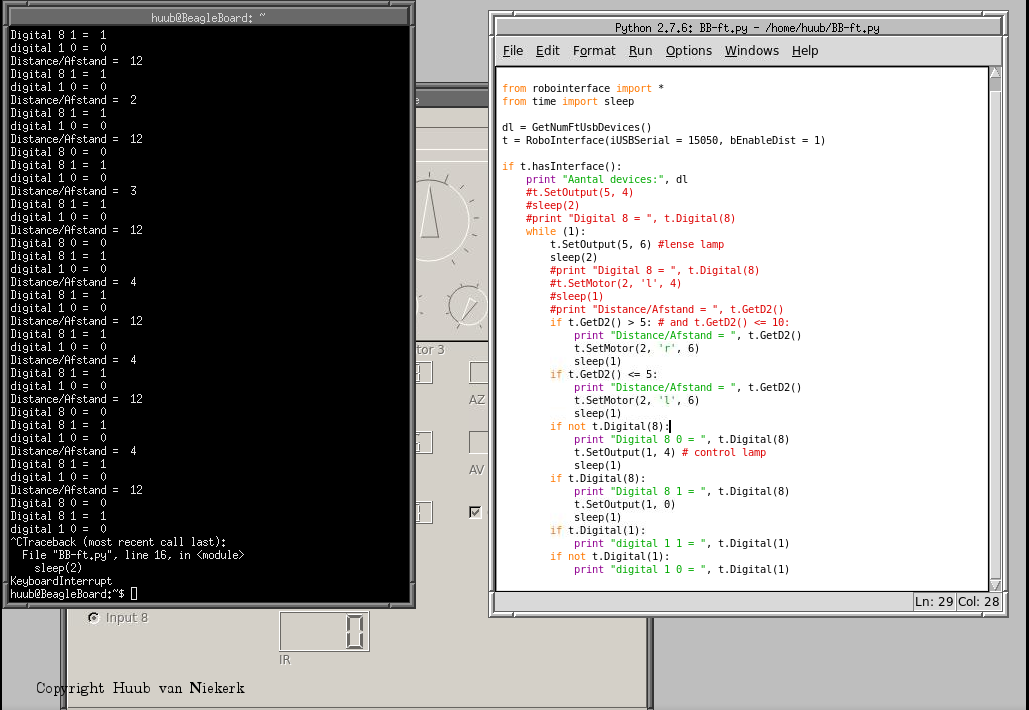
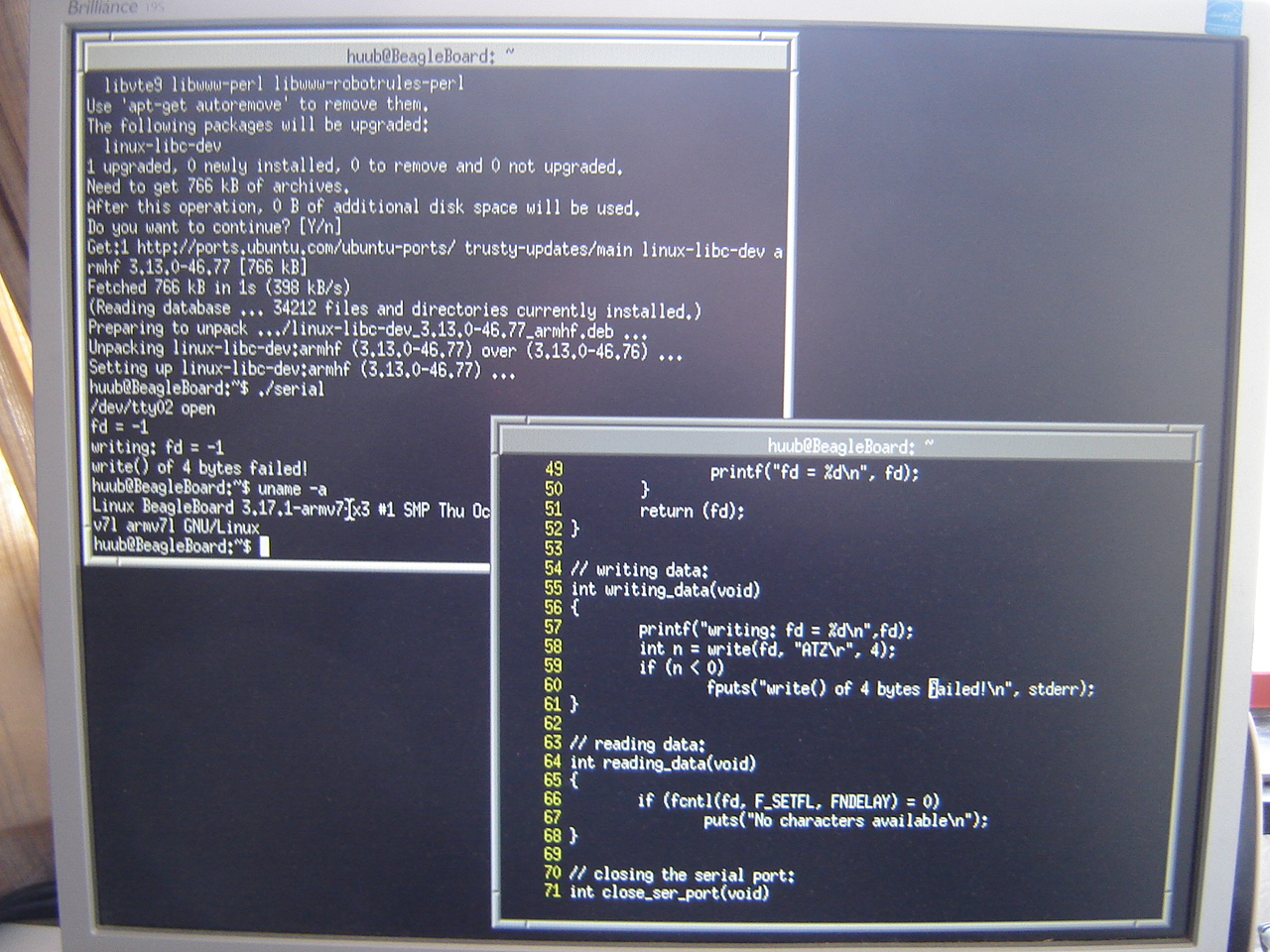
 6 May:
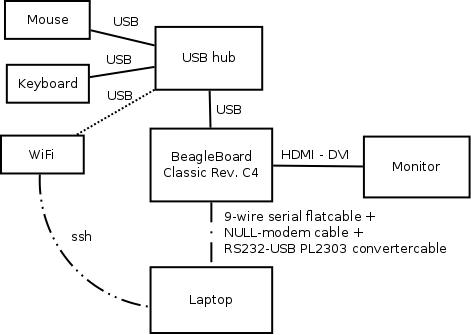
6 May: Diagnostics show odd results: apart they work,
together they don't?! Screenshot of serial terminal connection
using minicom.
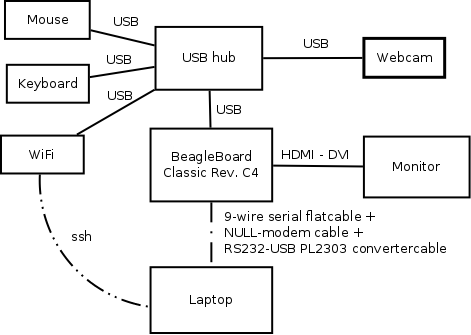
 29 April:
29 April: Due to a failing wifi USB network adapter, no
experiments could be done, so no video could be made either. I
know I started with keyboard and mouse attached to it via a USB
hub, but the keyboard failed a while ago without having a spare.
And to record on camera again...nah.
 22 April:
22 April: Some more experimenting ends with questions. See
the
video.
14 April: Some results after changing the range. See the
video
 8 April:
8 April: More experimenting. See the
video.
 25 March:
25 March: Colourspace again. Experimenting goes on.. See
the
video.
 18 March:
18 March: Continuing with colourspace. See the
video.
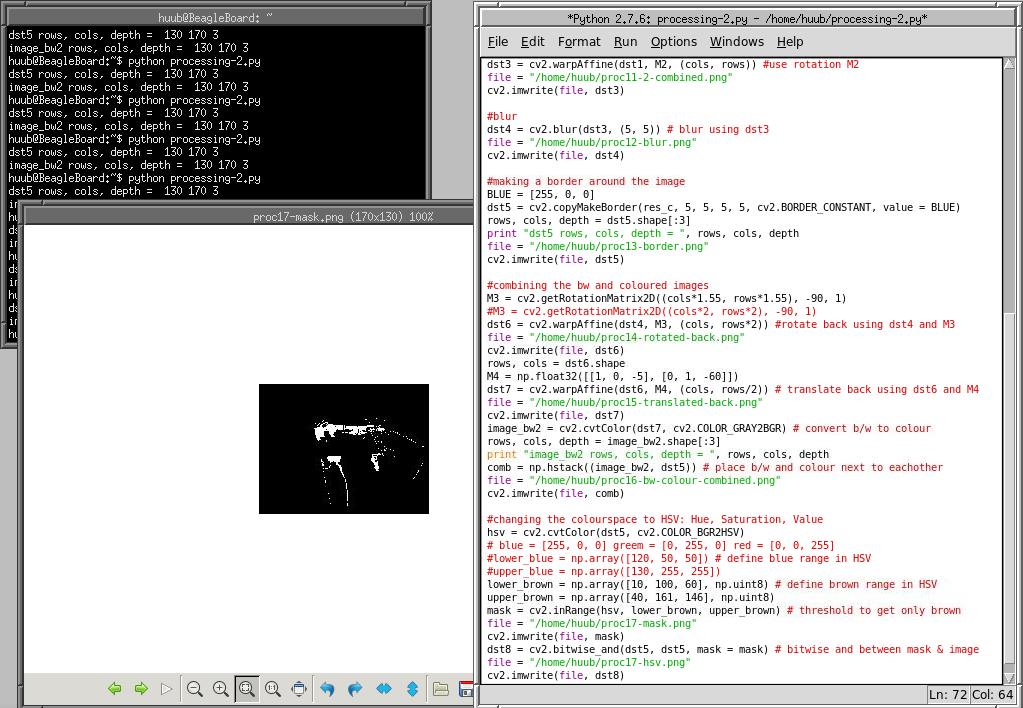
 11 March:
11 March: Trying out to change colourspace, e.g. BGR (not
RGB) to HSV:
video.
4 March Going on with the b/w image, I manage to solve it.
See the
video
and picture.
 26 February
26 February Trying to figure out where it goes wrong and
why:
video.
19 February A better solution wity b/w and colour. See also
this
video.
 6 February
6 February (See also the 12 February blog) Some
improvements with imaging, but not quite there yet. See also this
video.
 27 January
27 January Adding a border showed some interesting effects
and facts. See also this
video.
 15 January
15 January: Some more imaging.

 8 January 2016
8 January 2016: some simple image stuff. See the
blog or Youtube for the
video.
---------------------------------------------------- 2015
----------------------------------------------------------------------------------------------
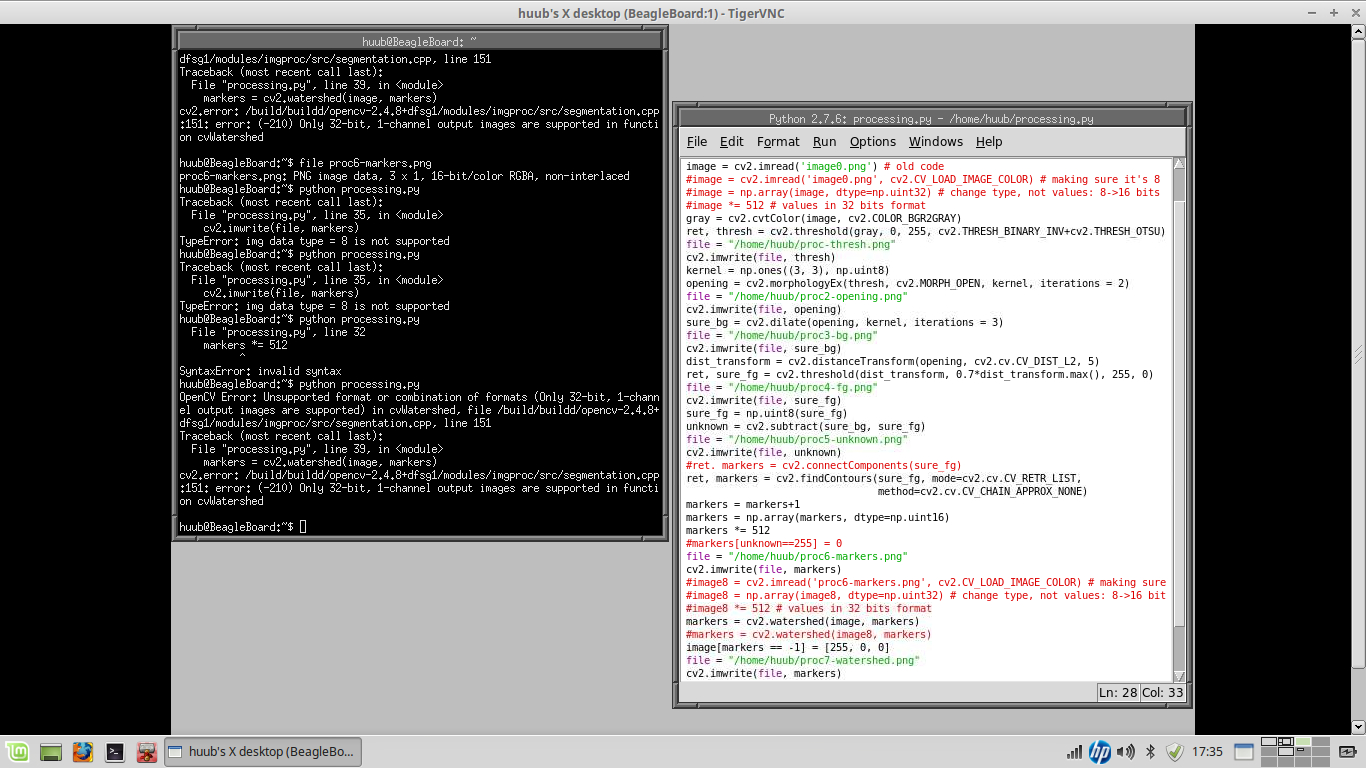
18 December 2015: Problems using OpenCV
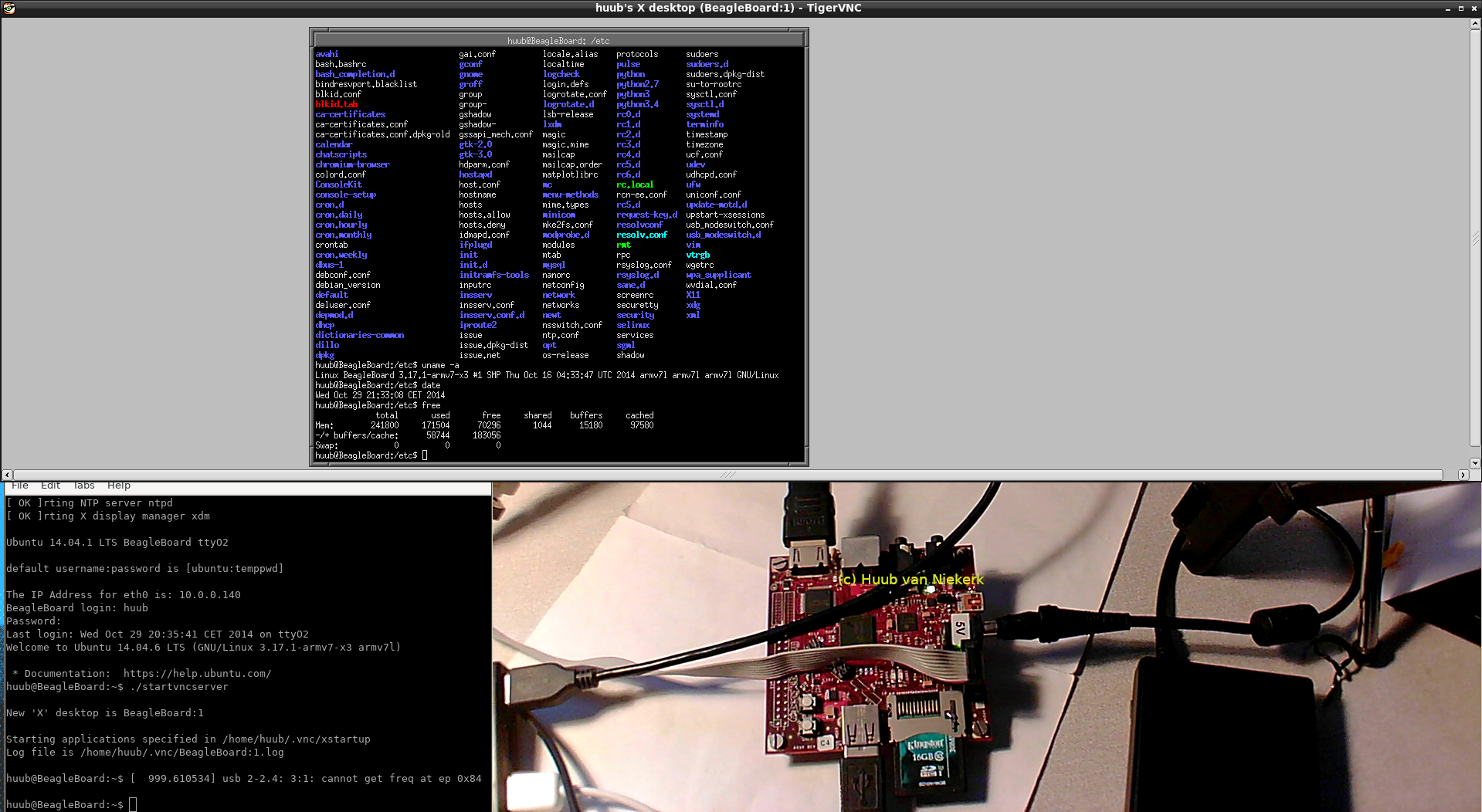
 4 December 2015
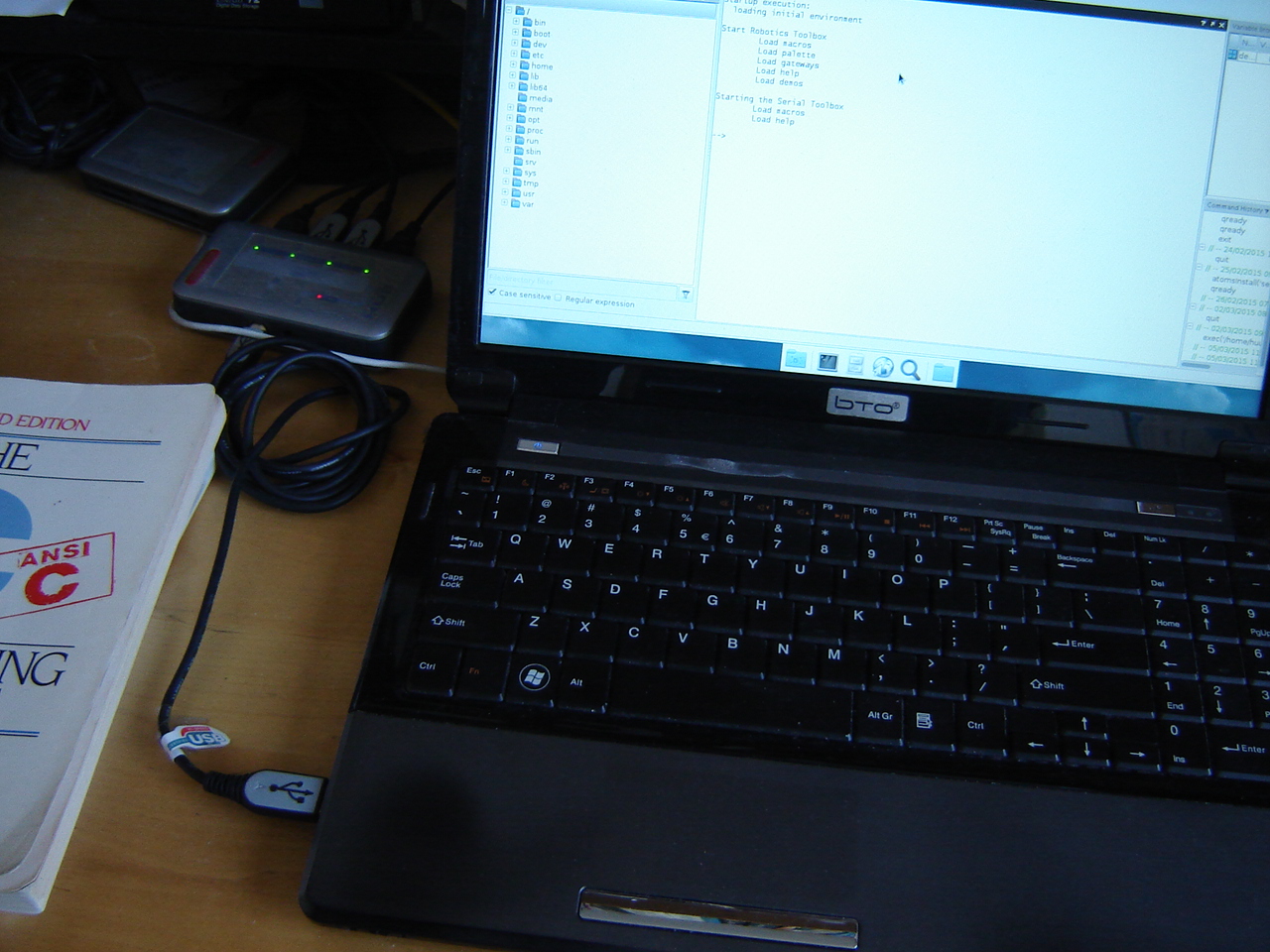
4 December 2015: After installing
tightvncserver,
it's much easier to create videos:
 13 Nov.:
13 Nov.: while trying to use OpenCV with C++, I find that
it yet has to be installed. Unfortunately, the SD card serving as
"harddisk" is as good as full. So, either I have to stick with
Python or switch to a 32 GB SD card.
21 August Errors with PyAudio. See the
blog

To get an overview of how I started to use the BB and webcam, I
created this
video.
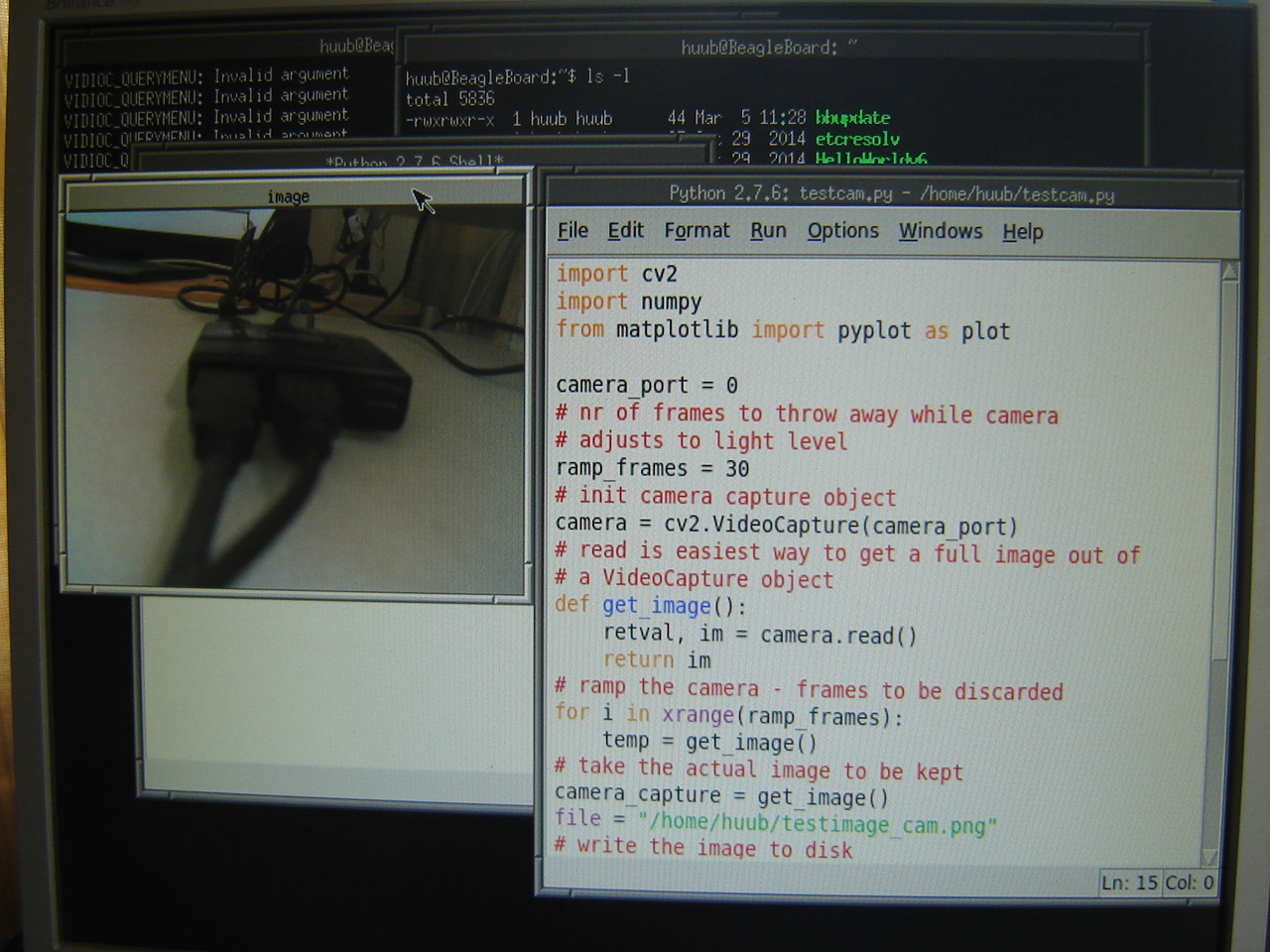 Picture of code
and image from webcam
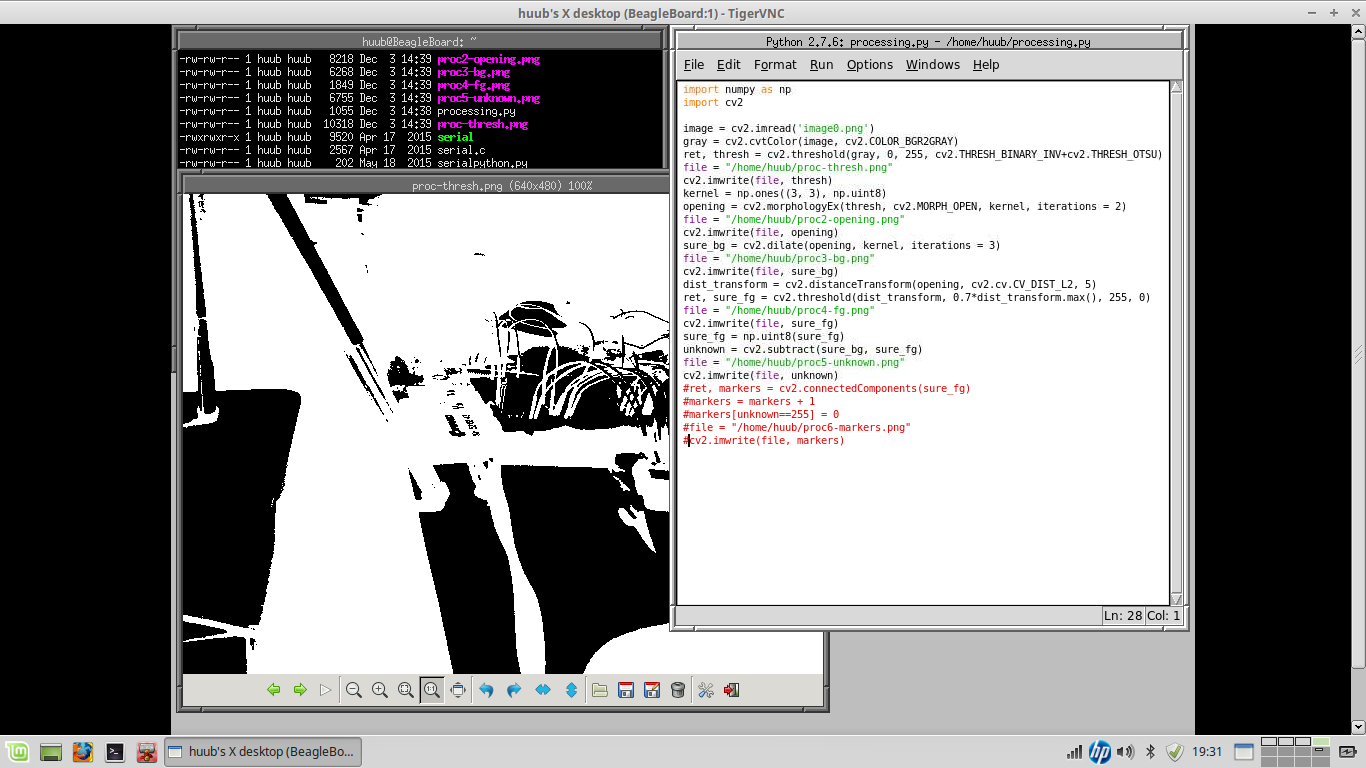
Picture of code
and image from webcam
