29 December Because of Christmas period, I only had time for a limited number of videos.
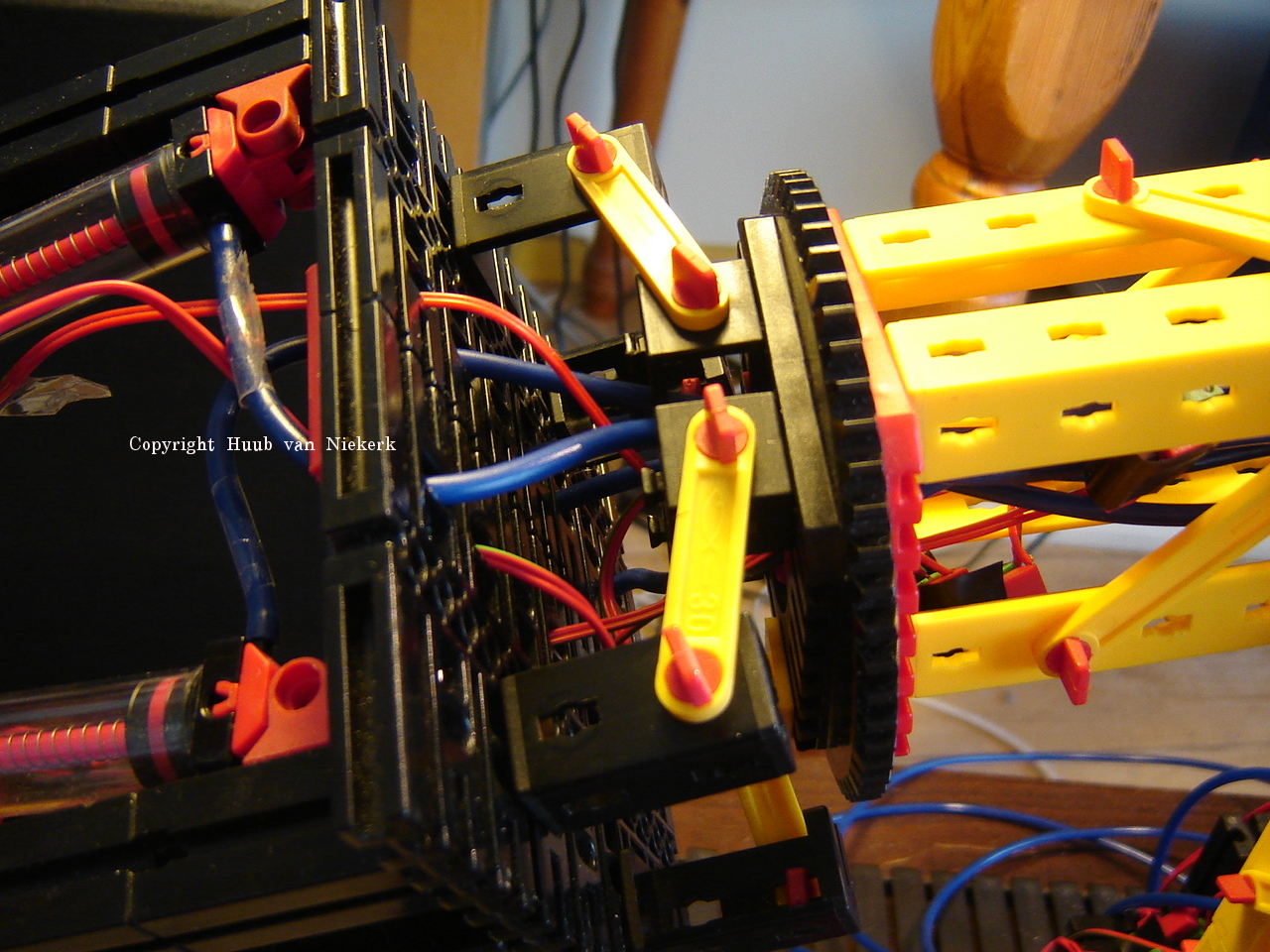
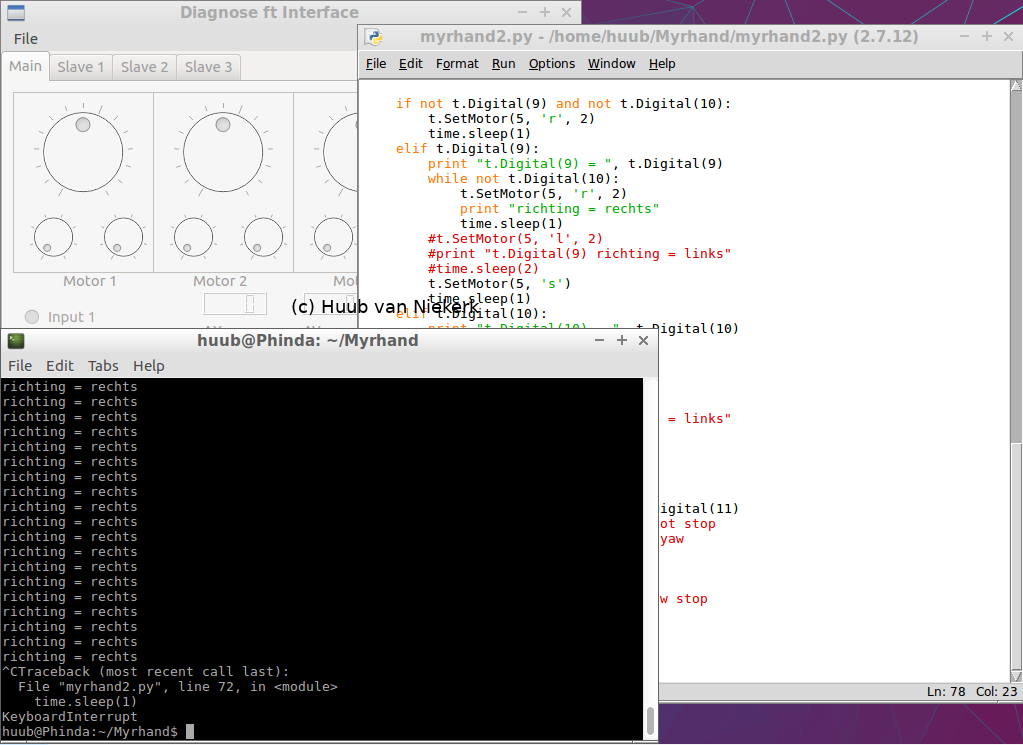
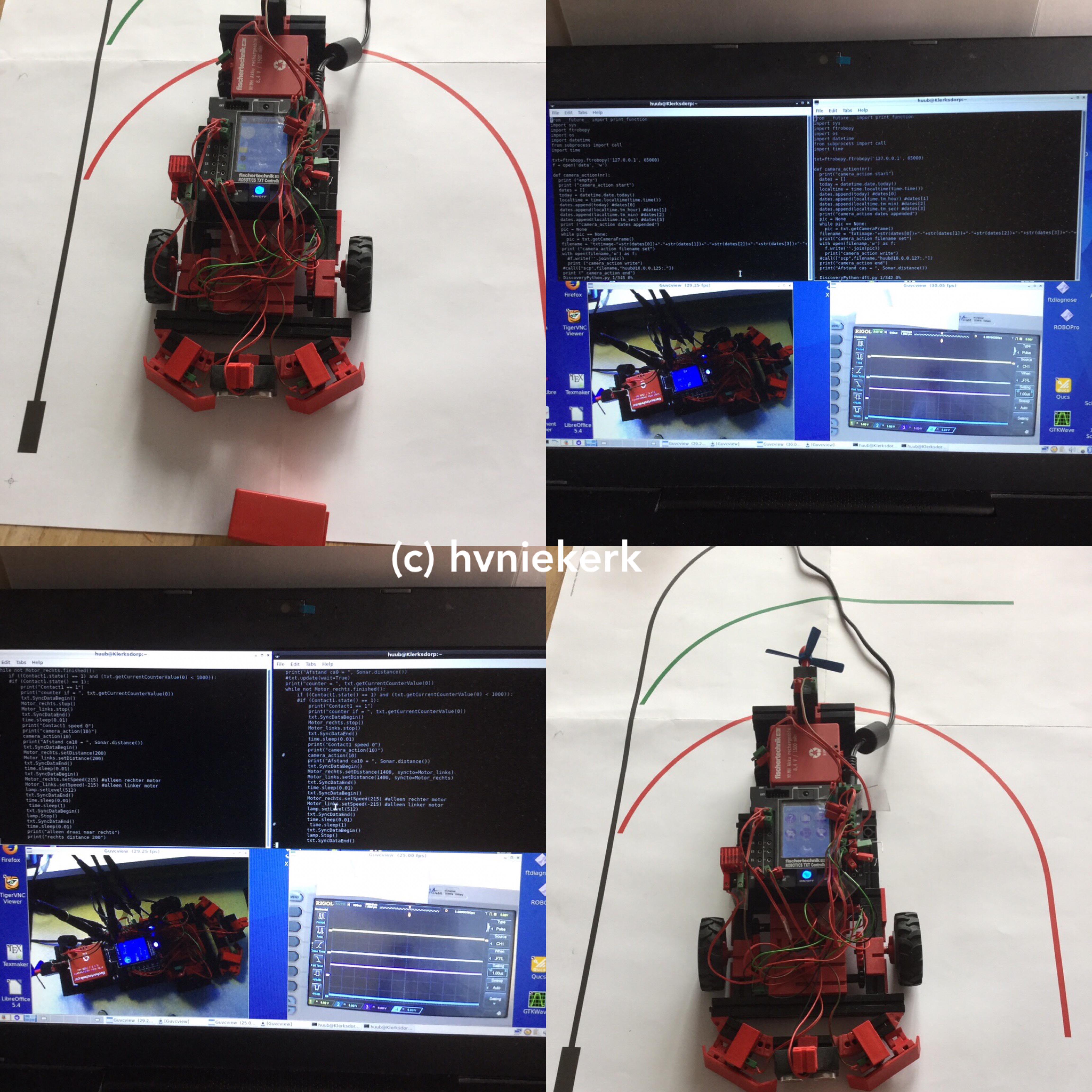
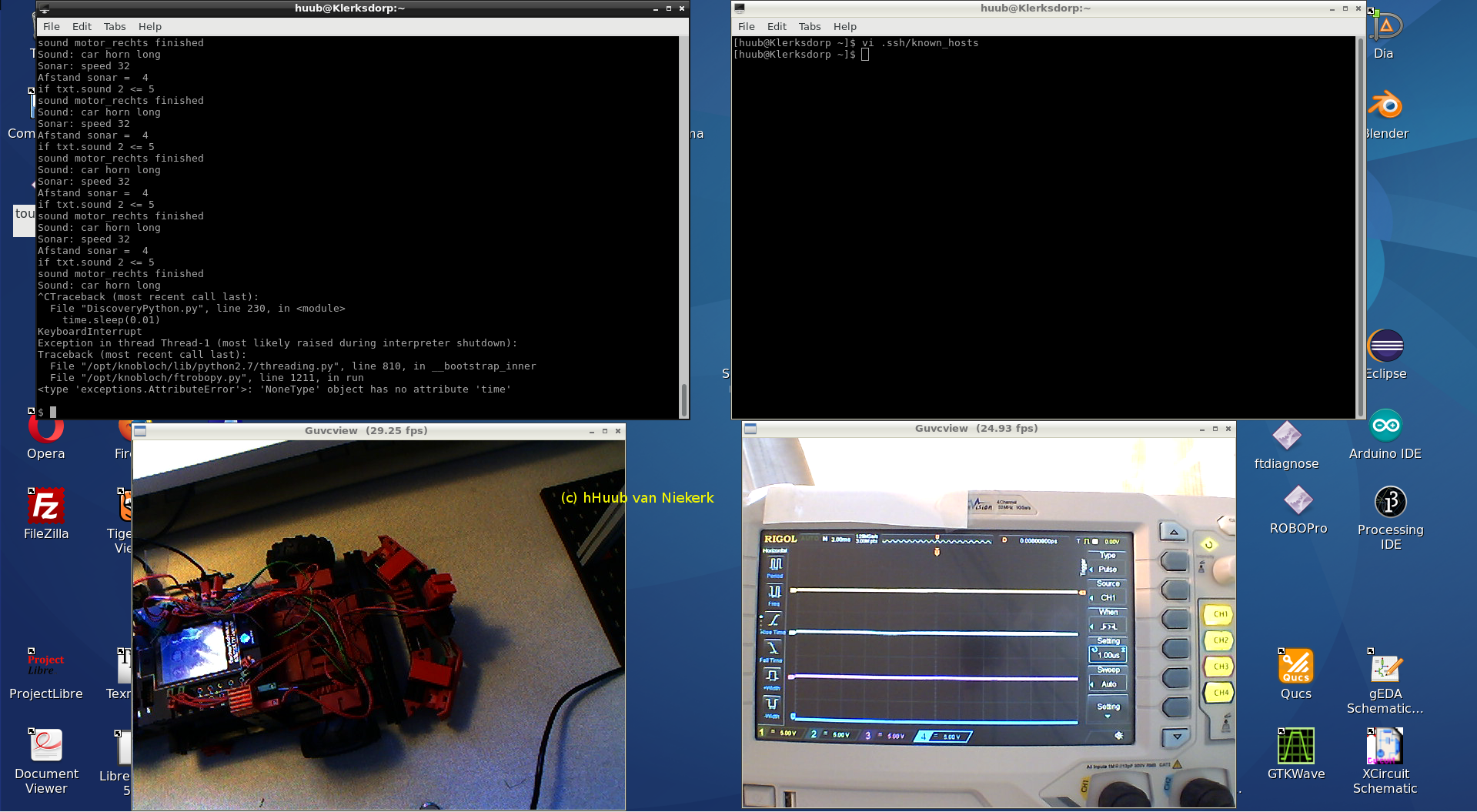
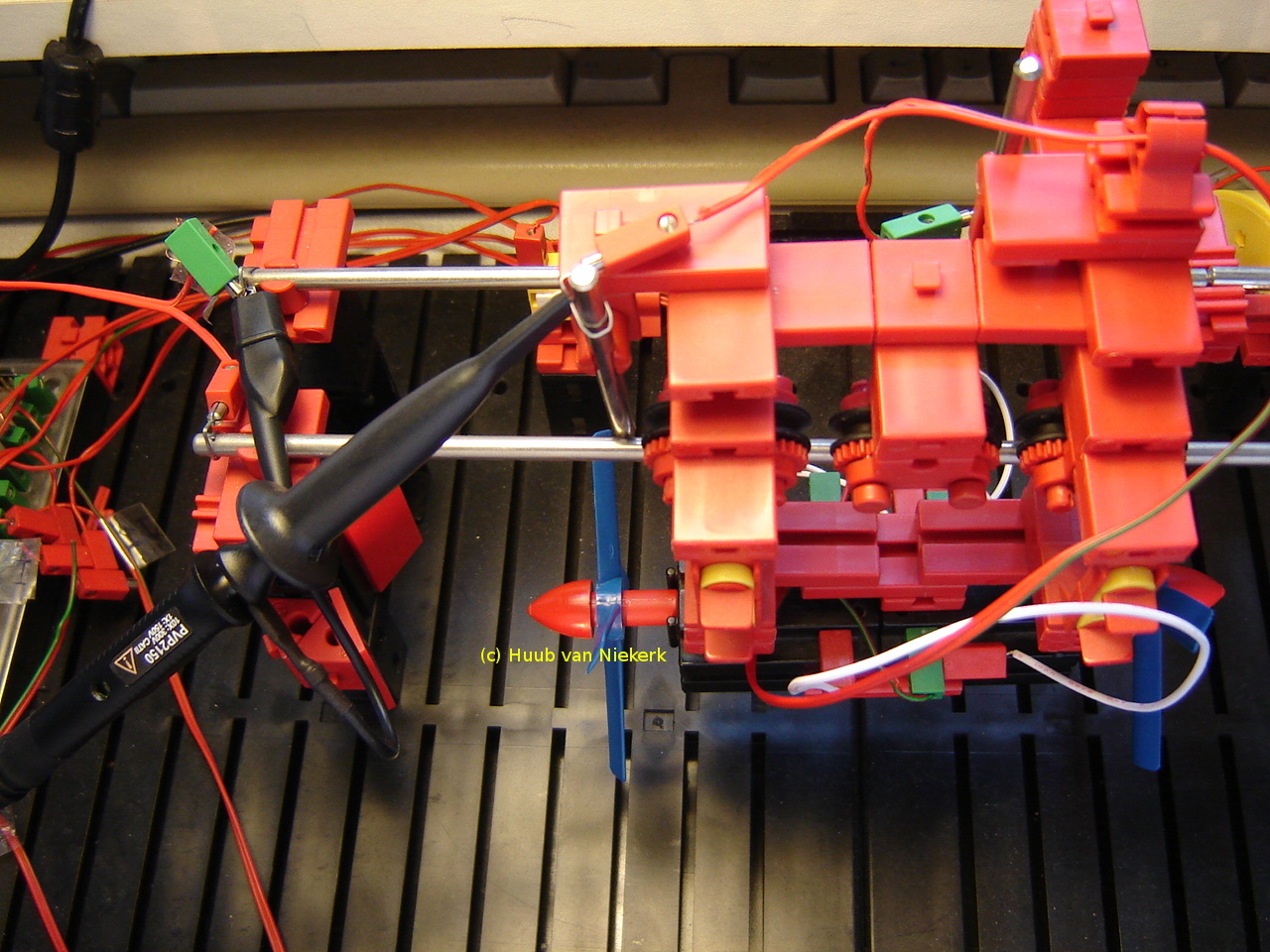
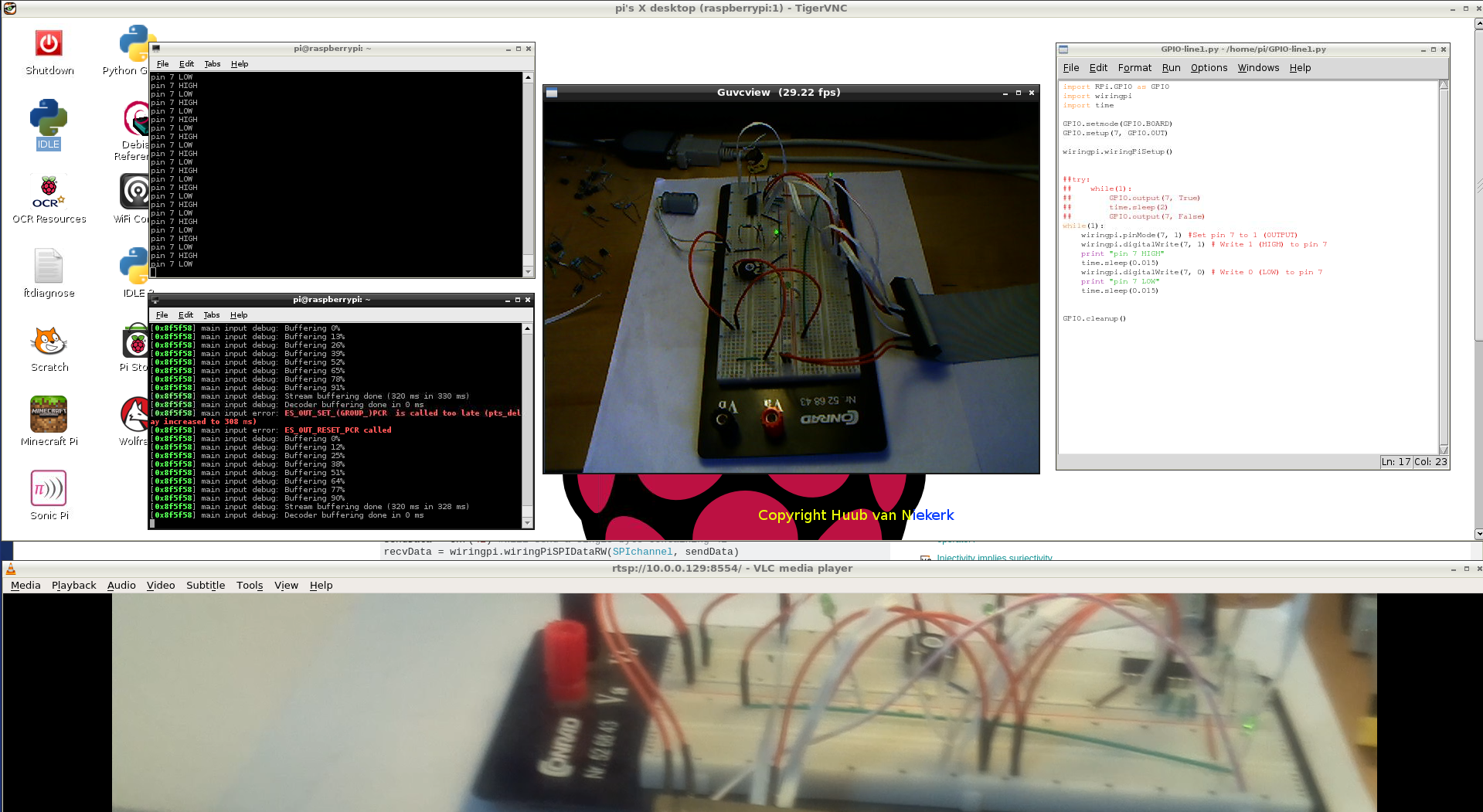
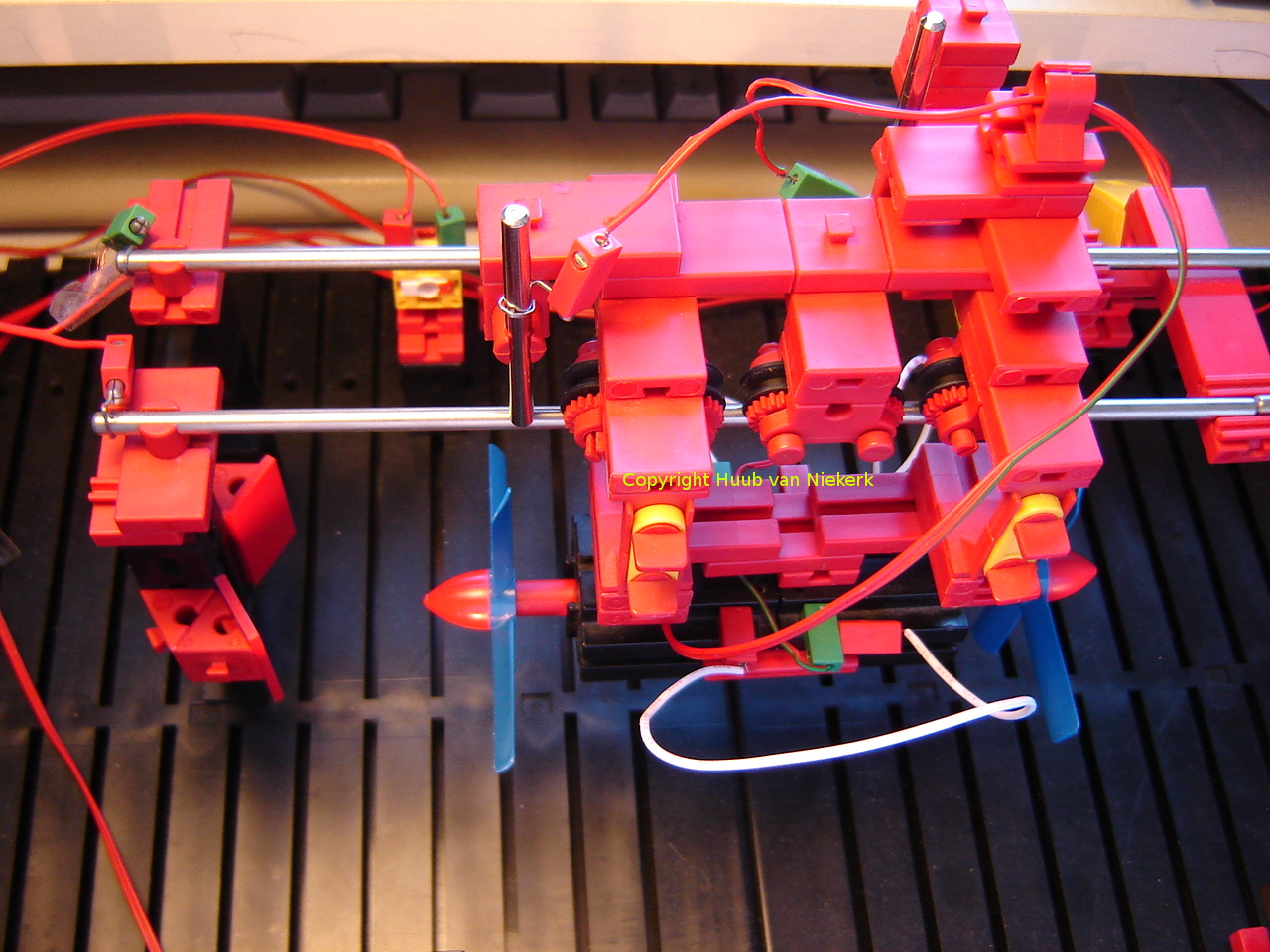
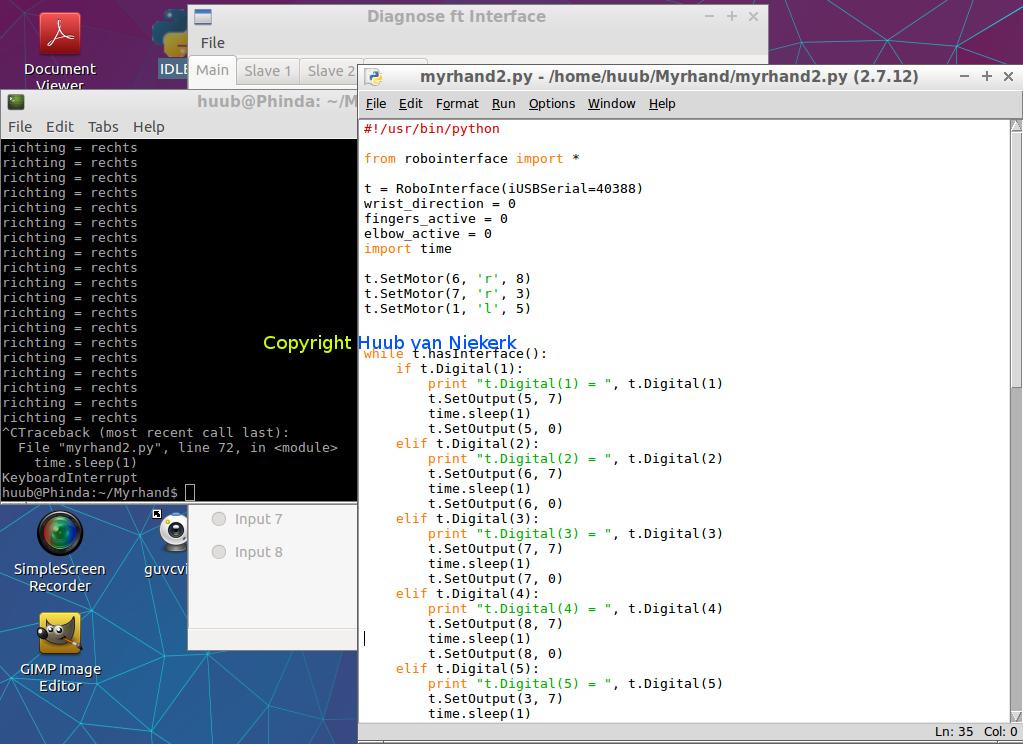
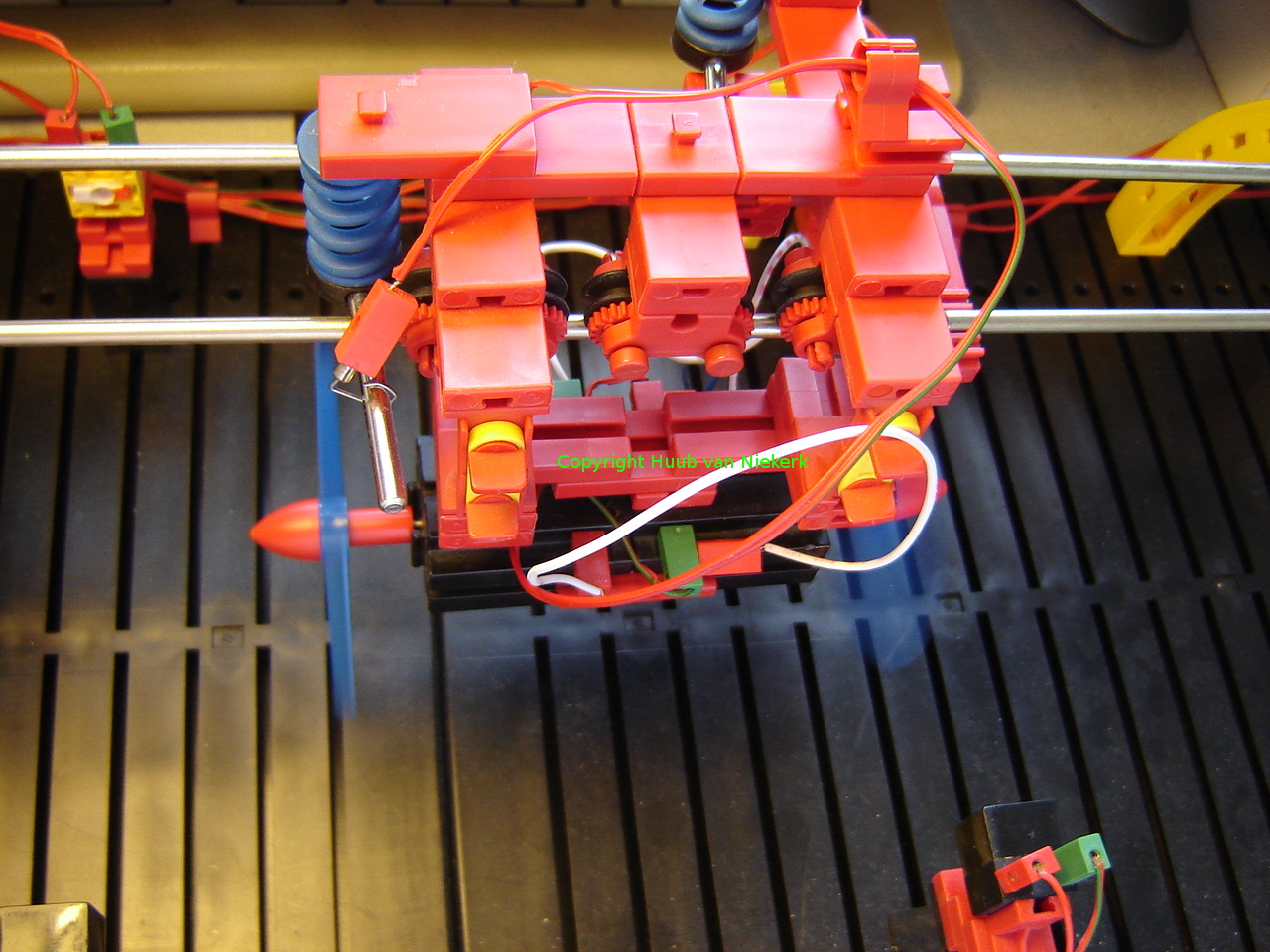
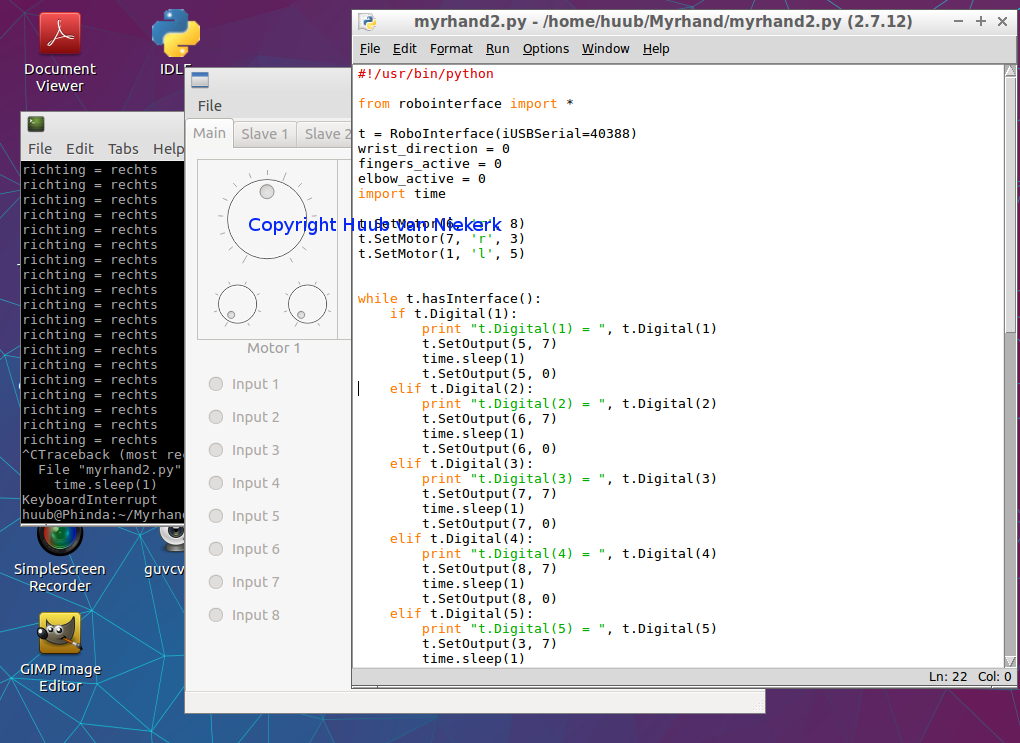
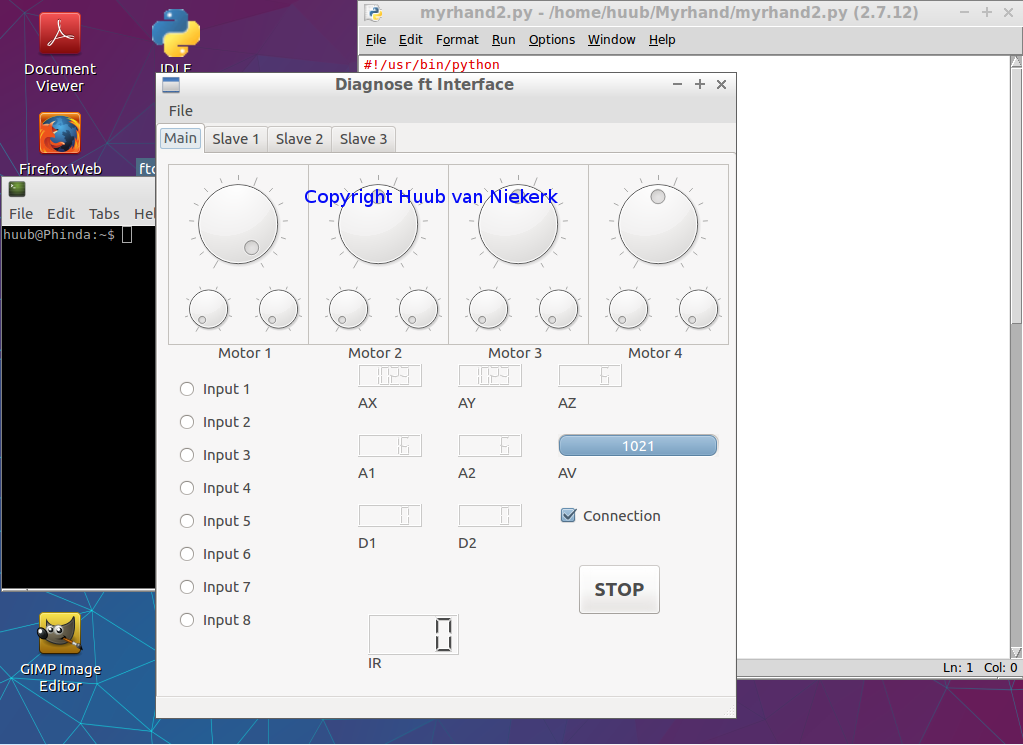
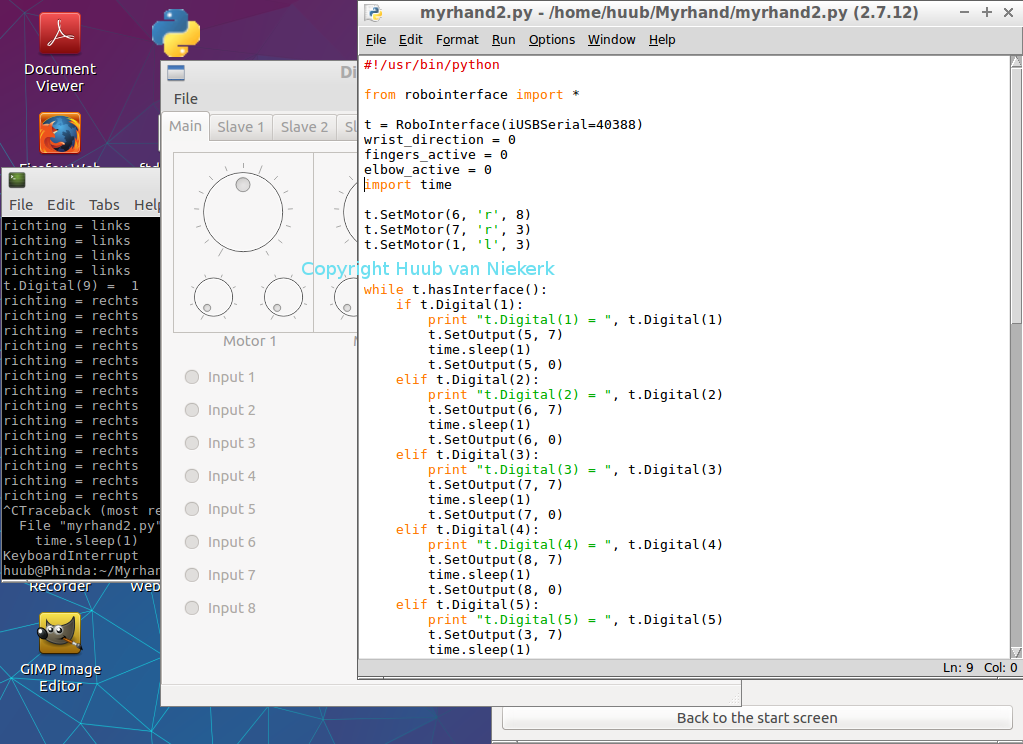
Hand: After getting a hint on the winch, a replacement and reconstruction is needed, and proves a challenge. Then what seems to work with the diagnose, Python needs a code change. Will it work? Click the image to watch the video.
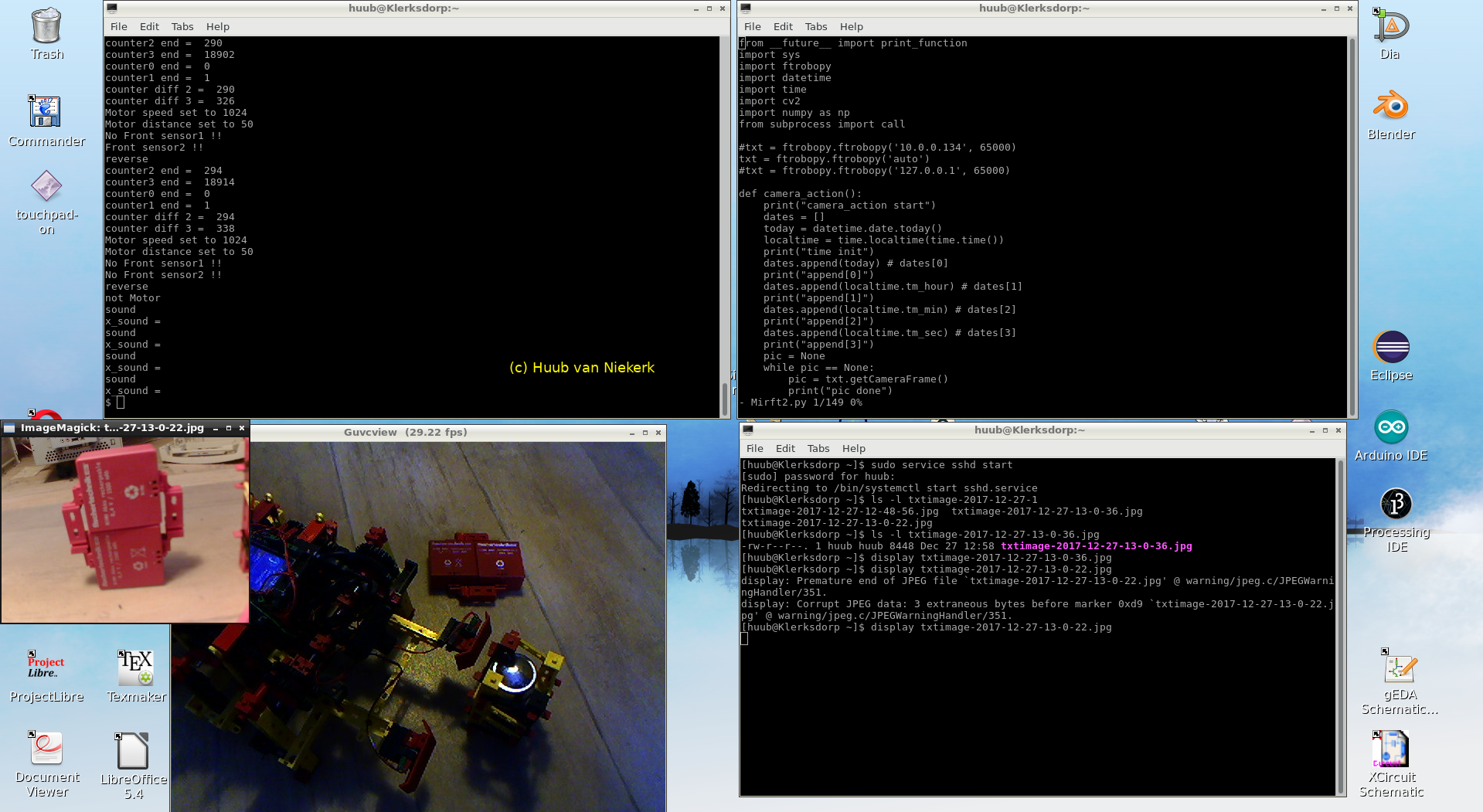
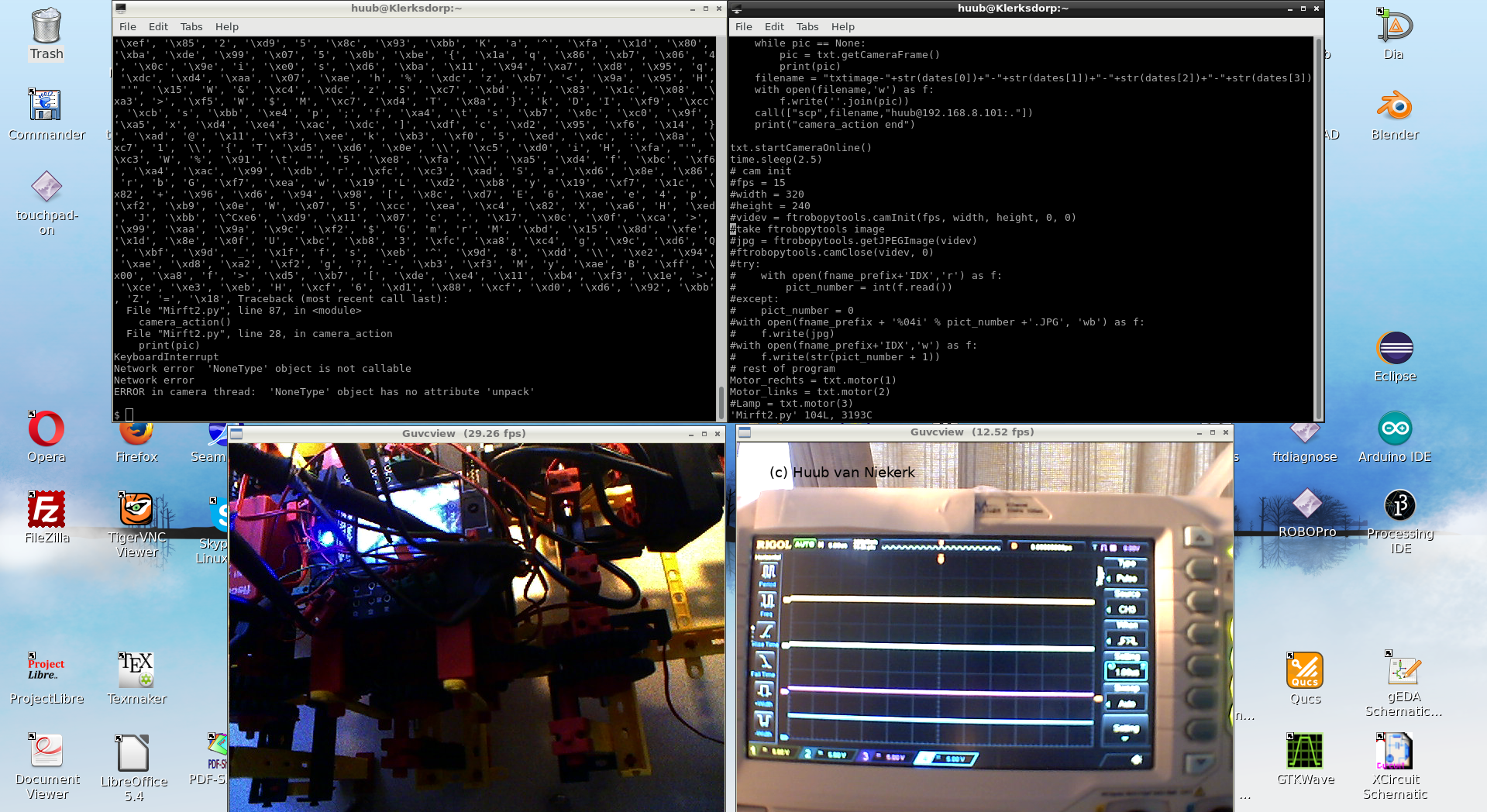
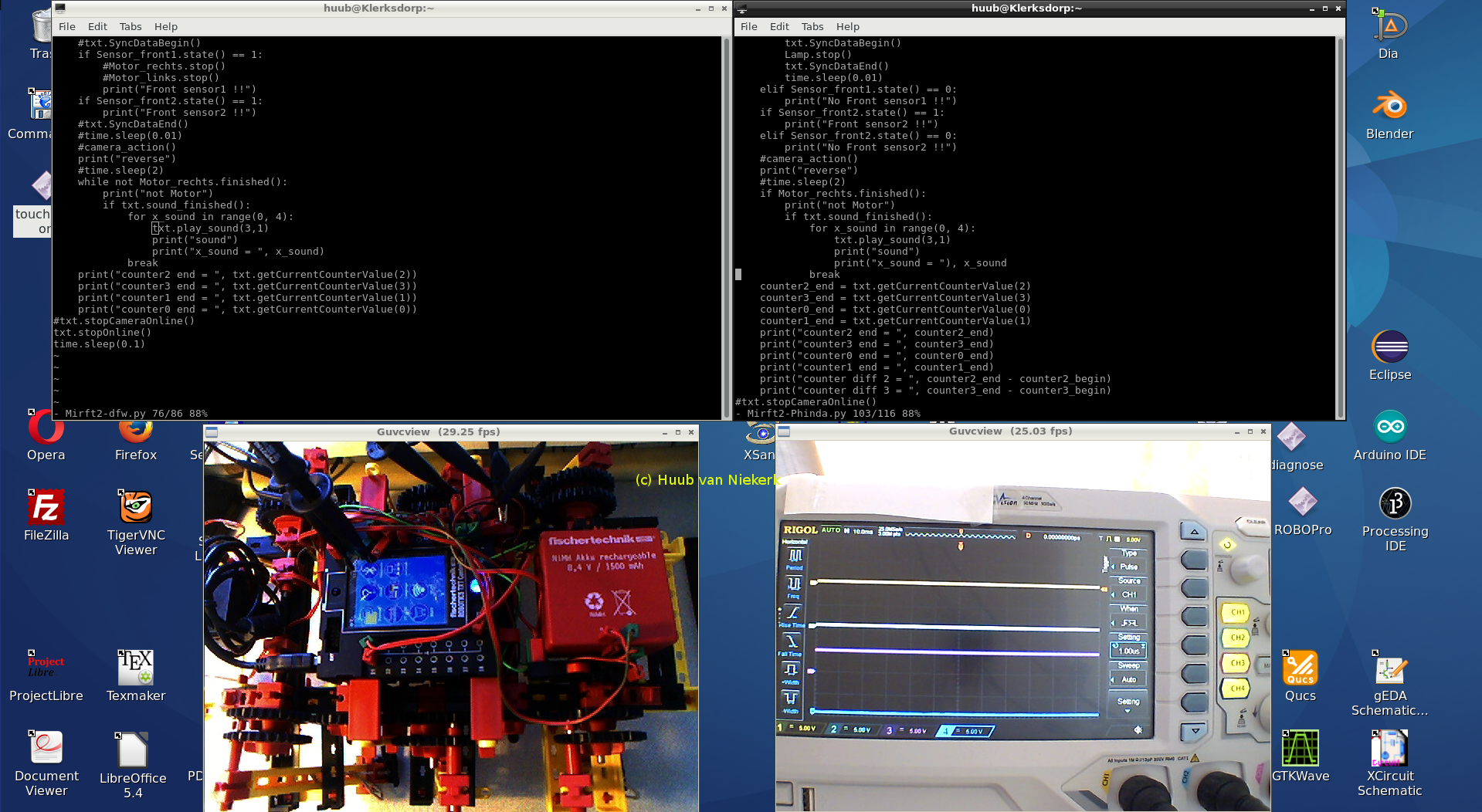
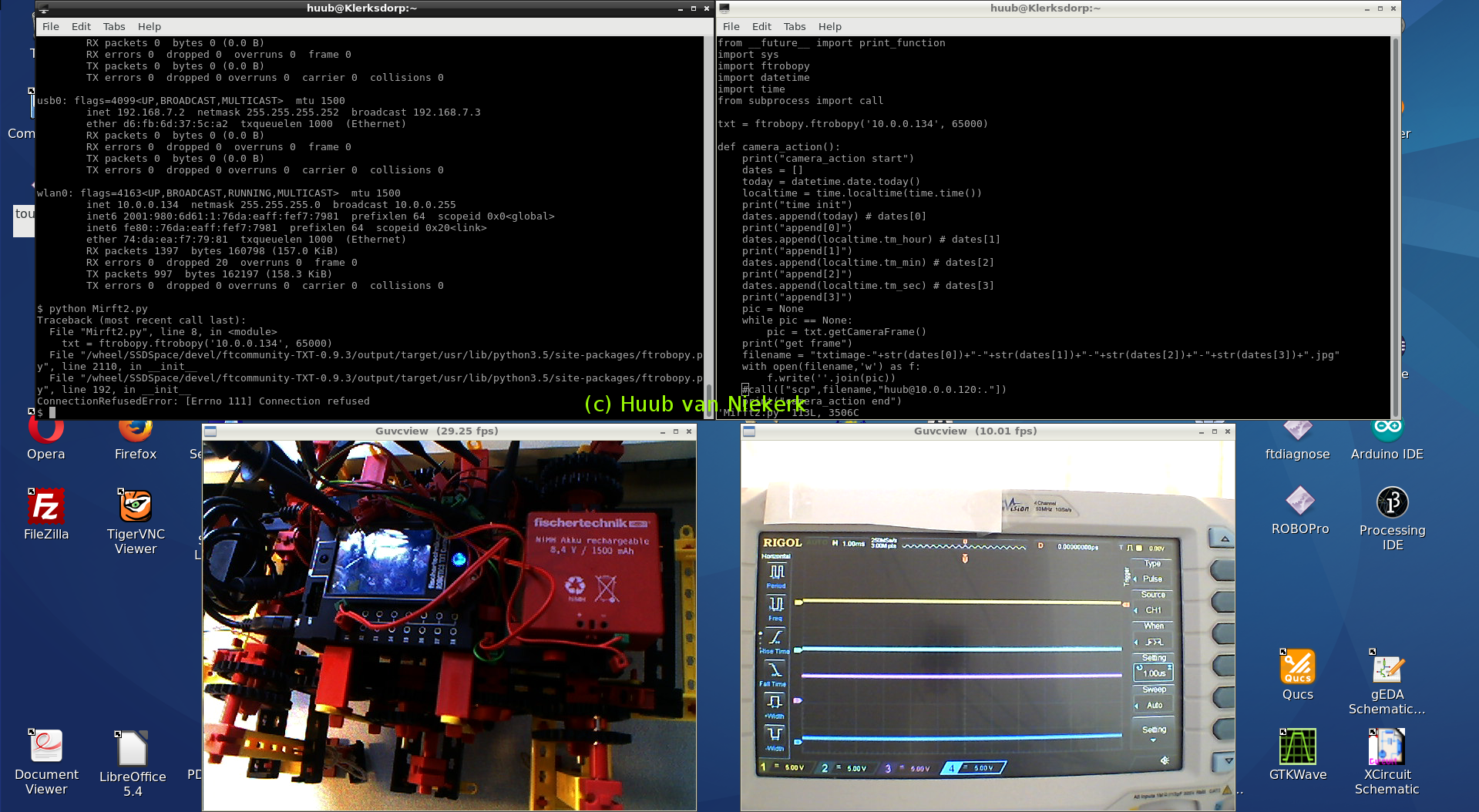
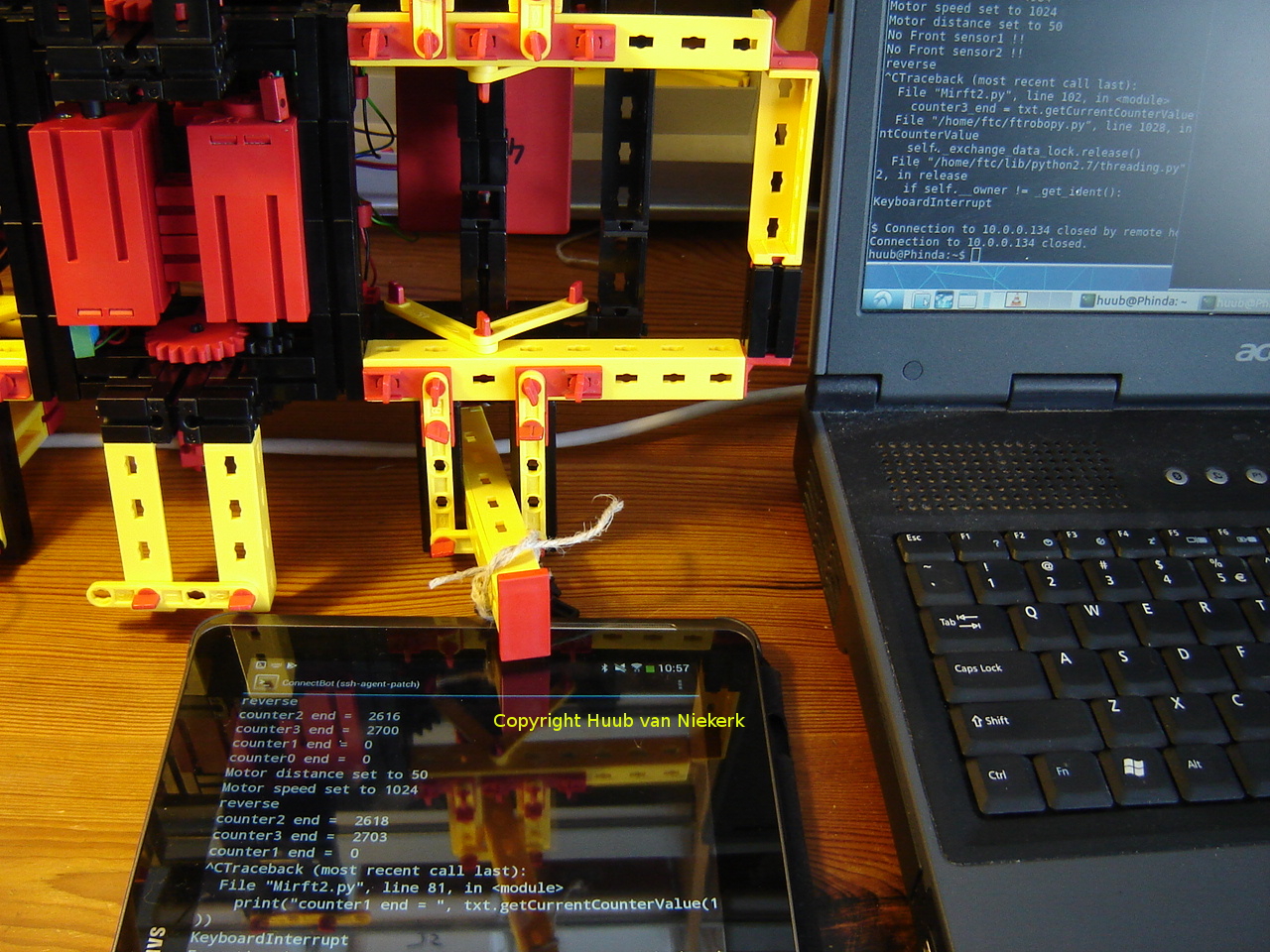
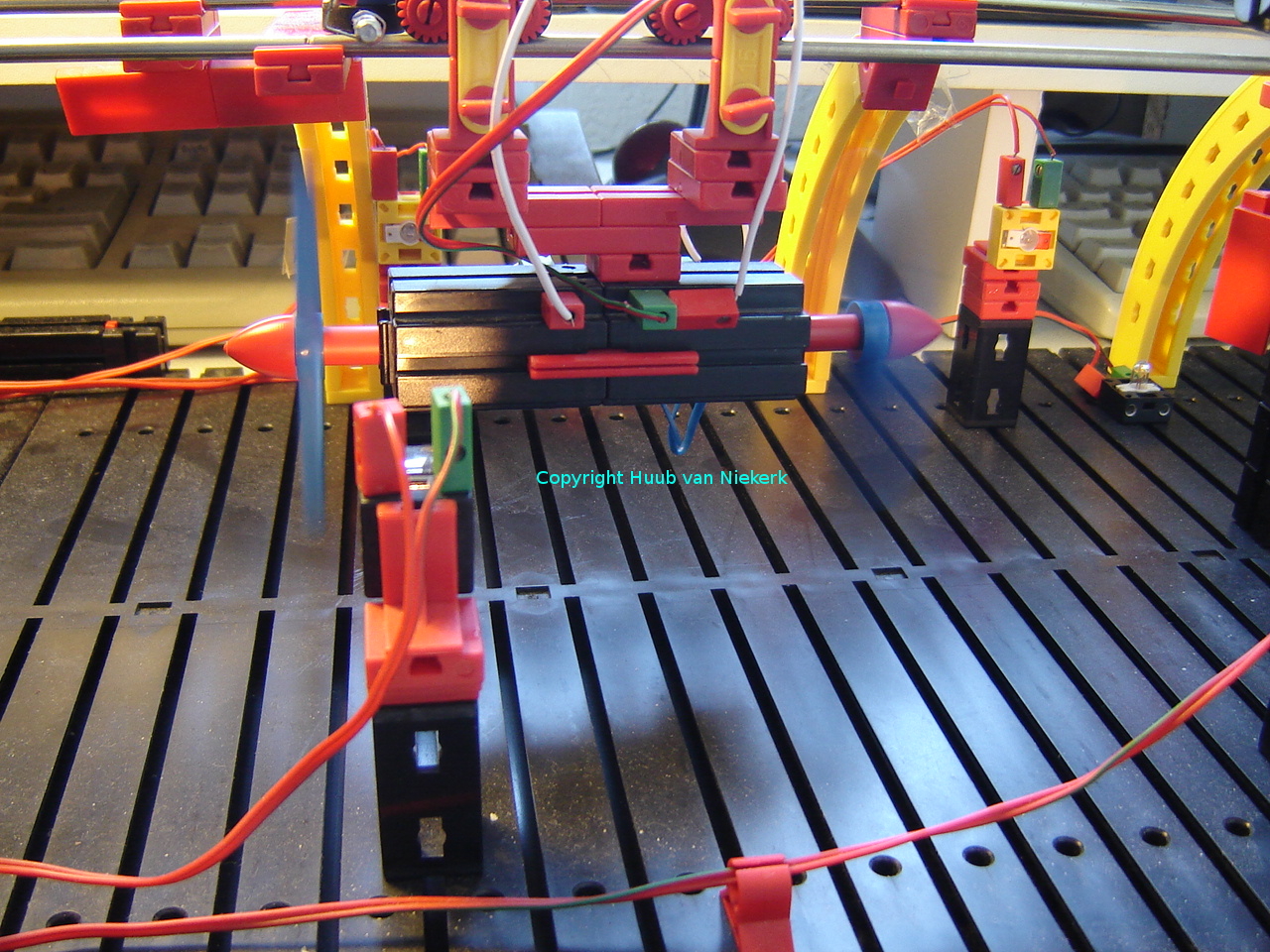
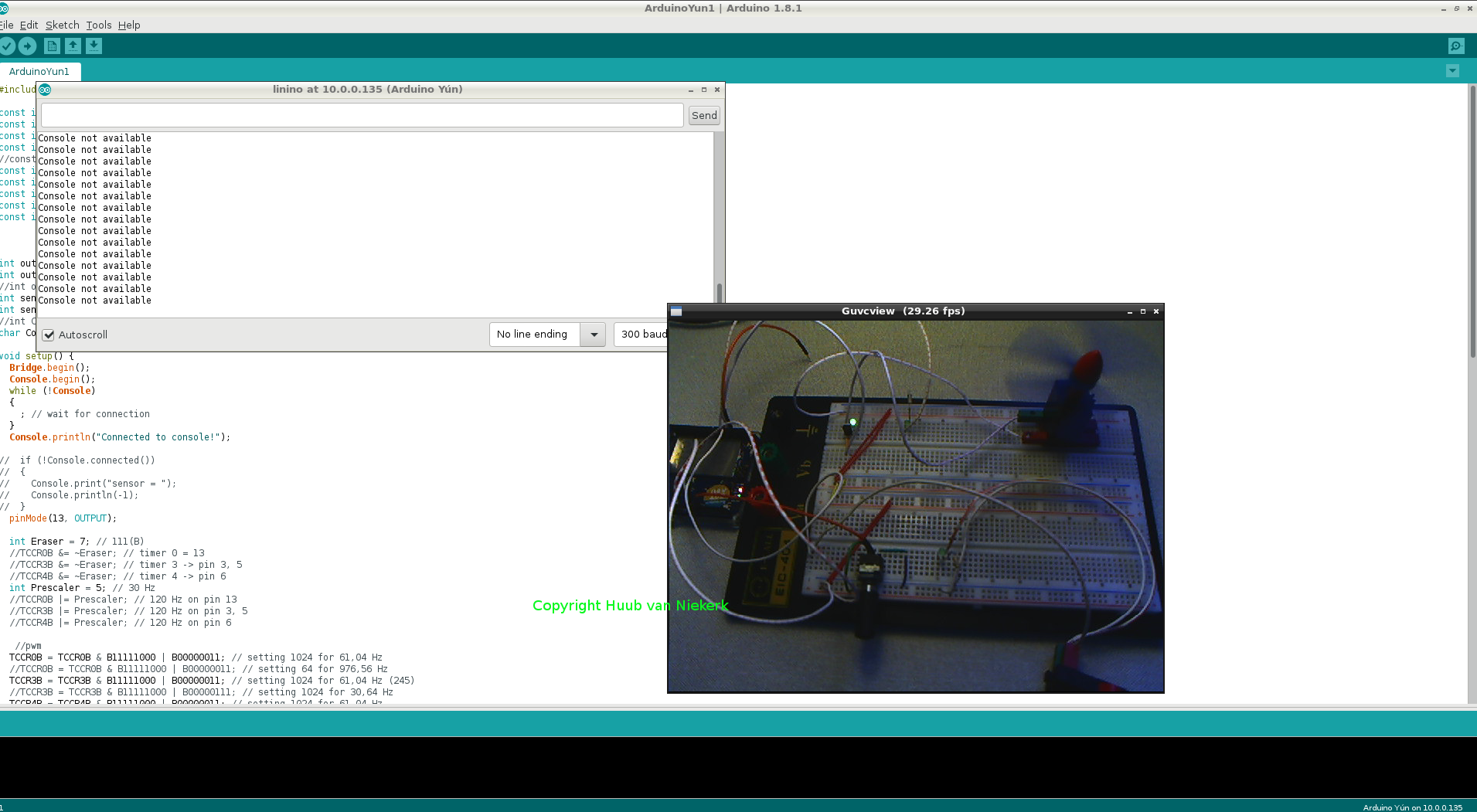
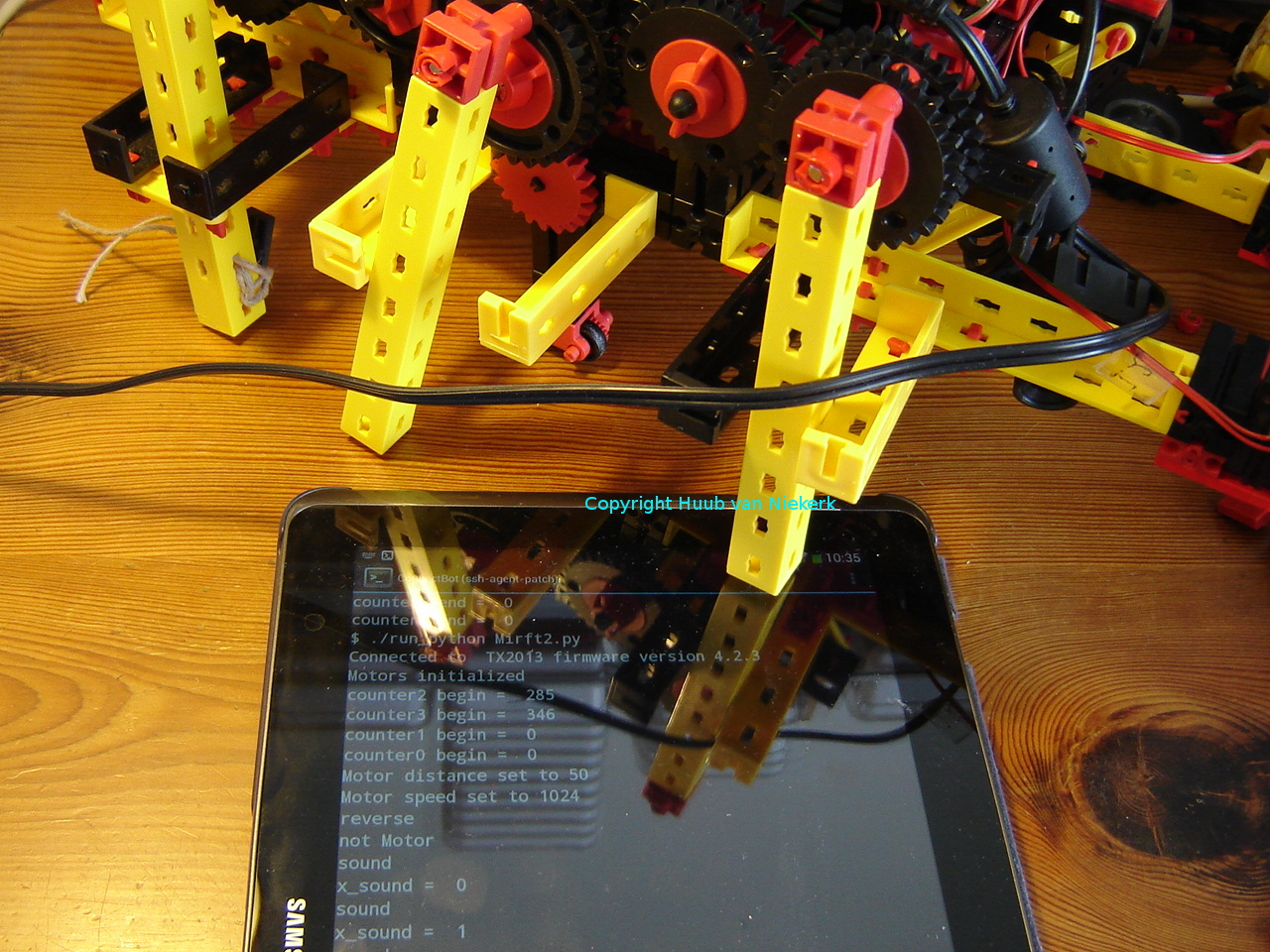
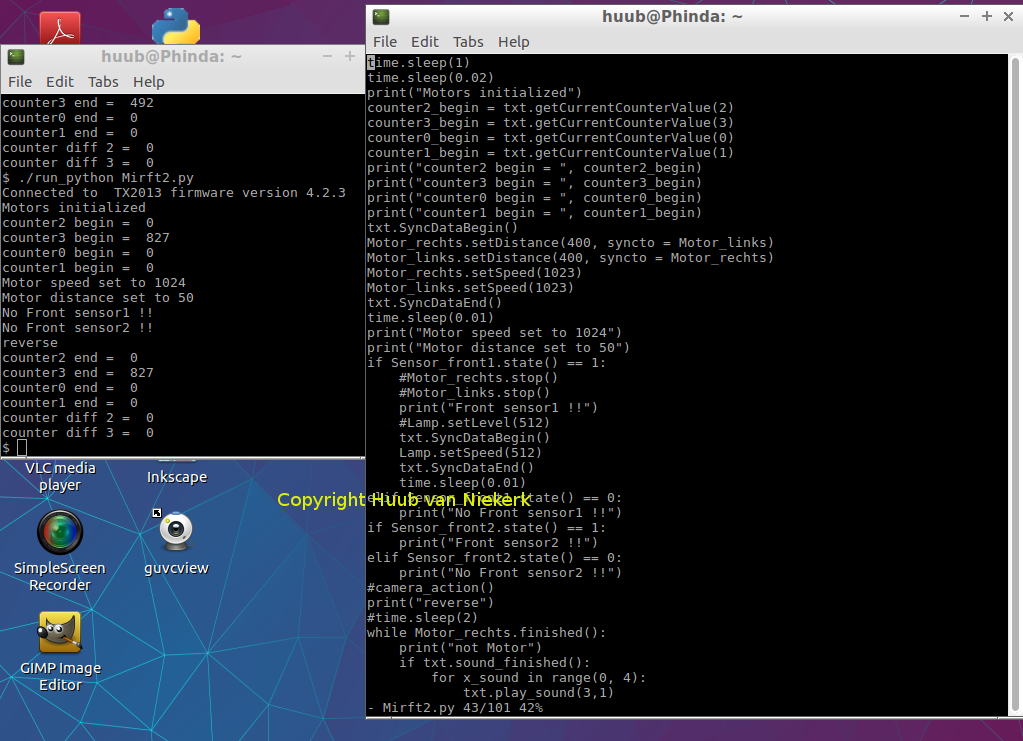
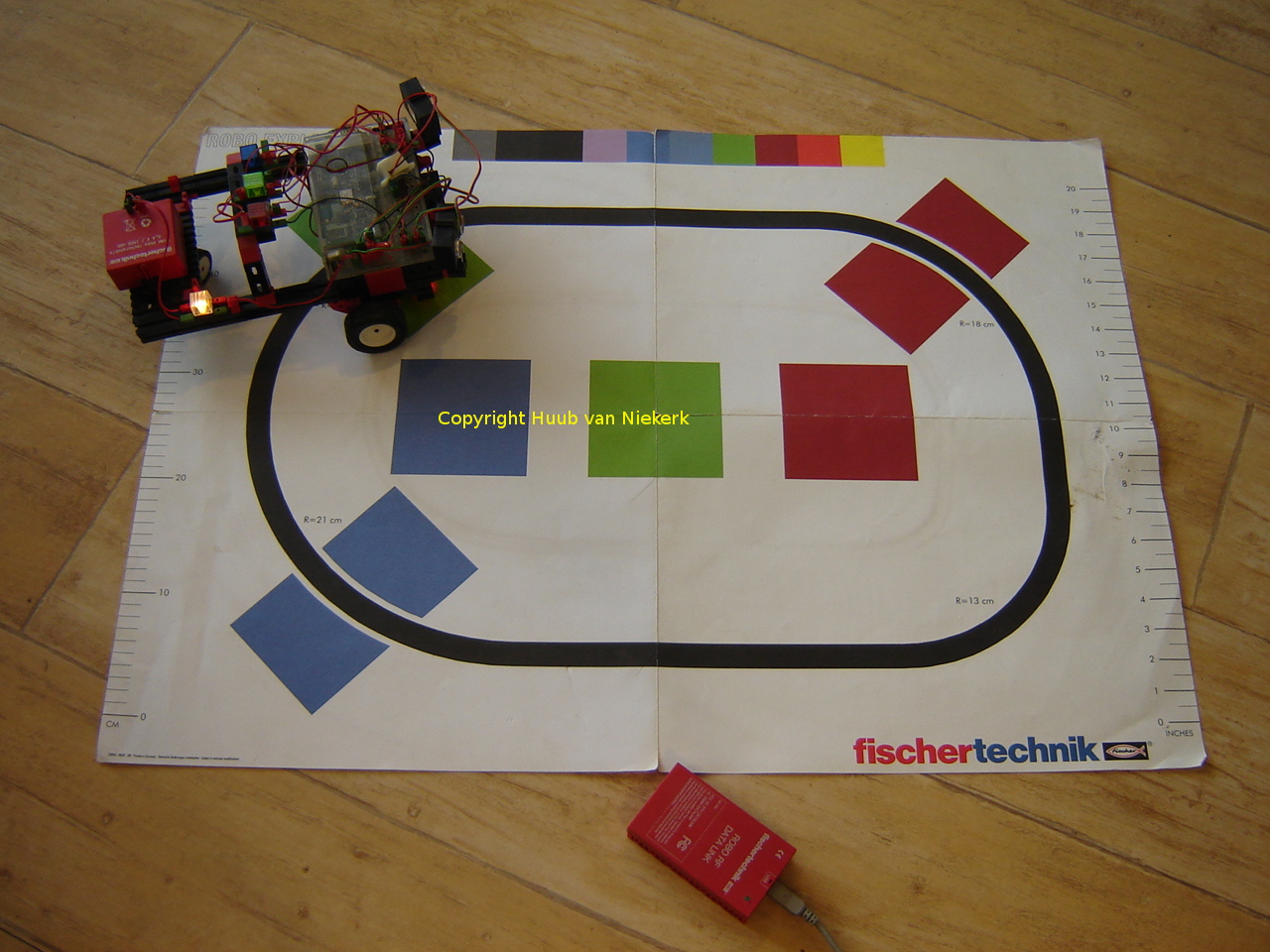
Mirft2: Testing sensors, timing with the camera...and objects. Where does it go wrong? Trajectory? Surface? Area? Authentication? Click the image to watch the video.
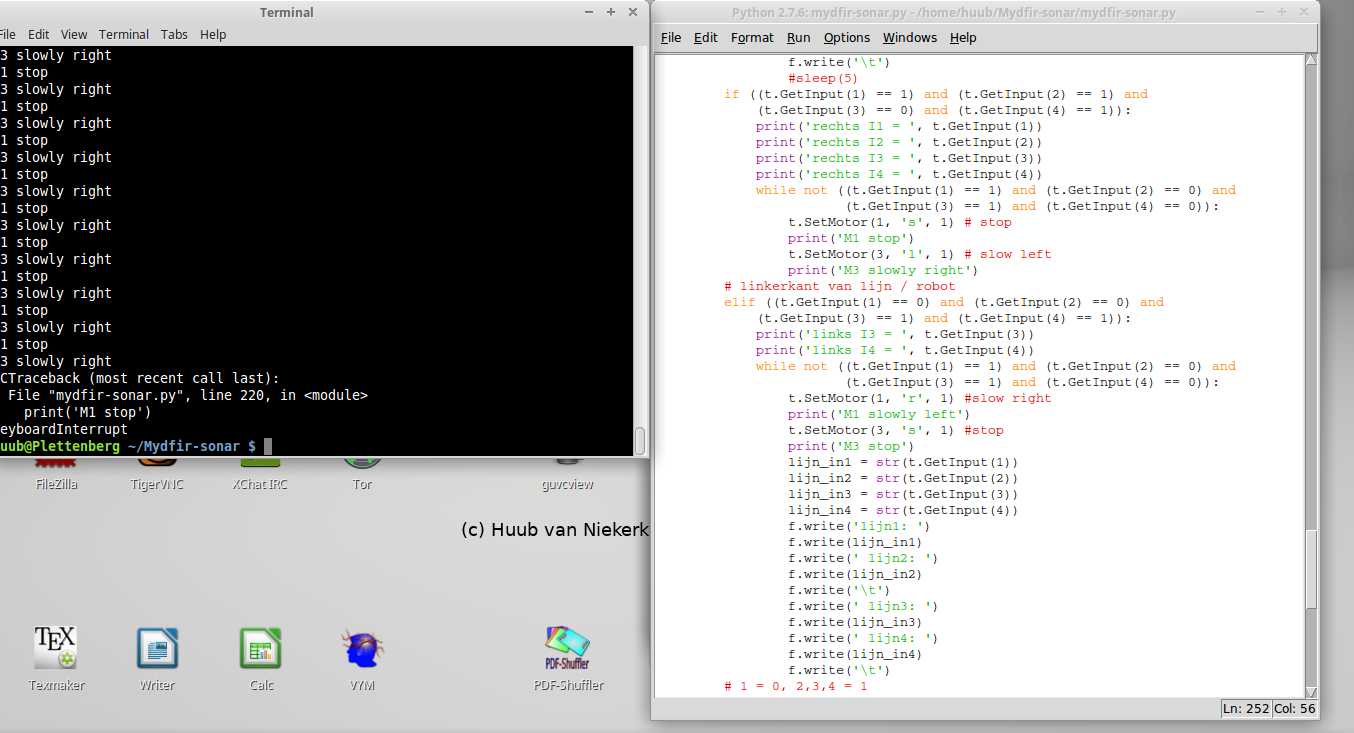
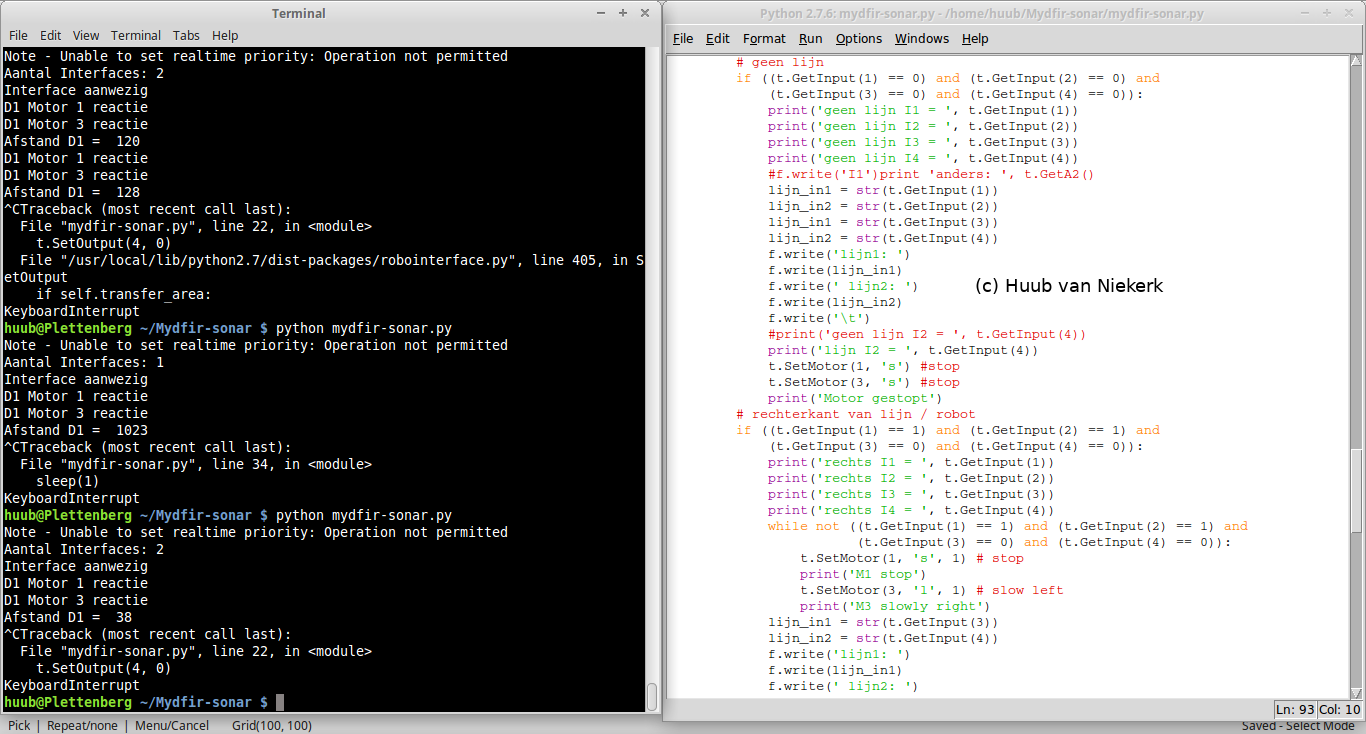
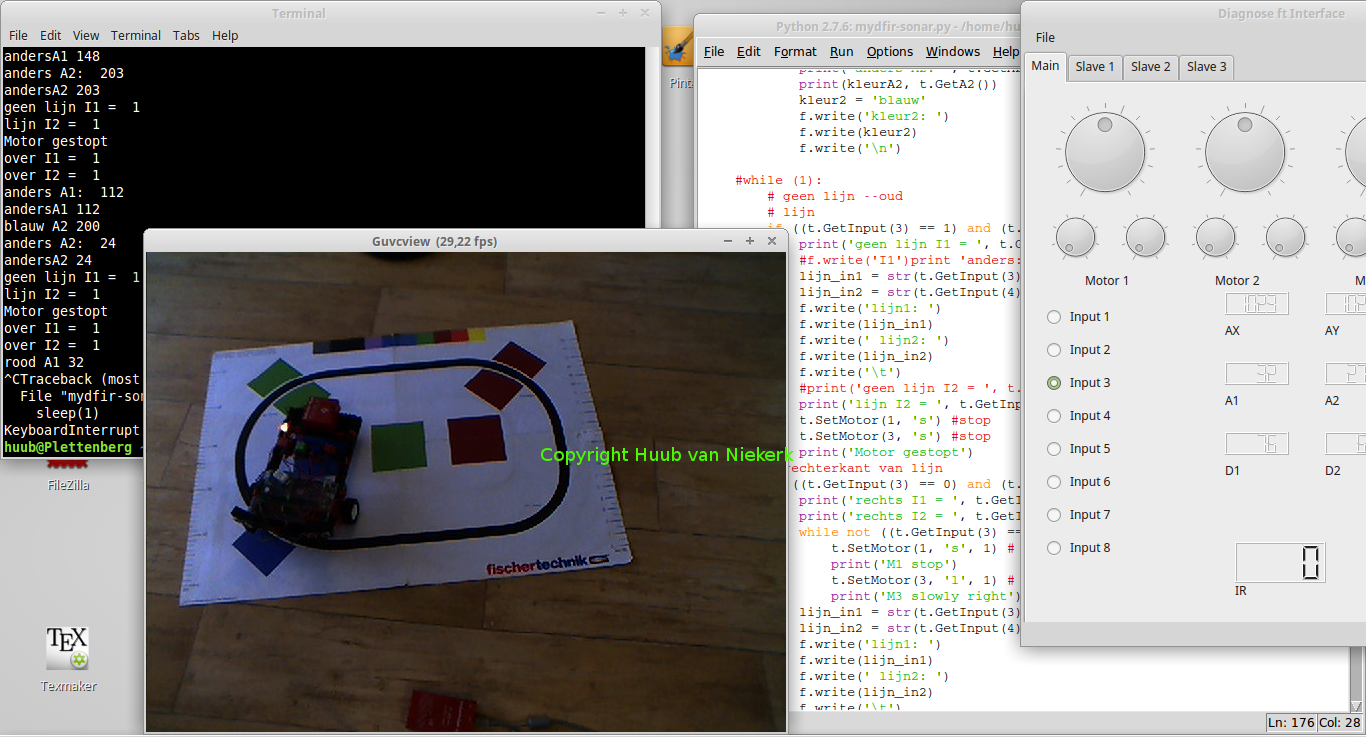
Mydfir: Testing again: sonar and line sensors. What going wrong? Must be the algorithm...is 1 really 1? How does the auto-correction go? What settings? Battery oops? How to solve a frame oops? Click the image to watch the video.
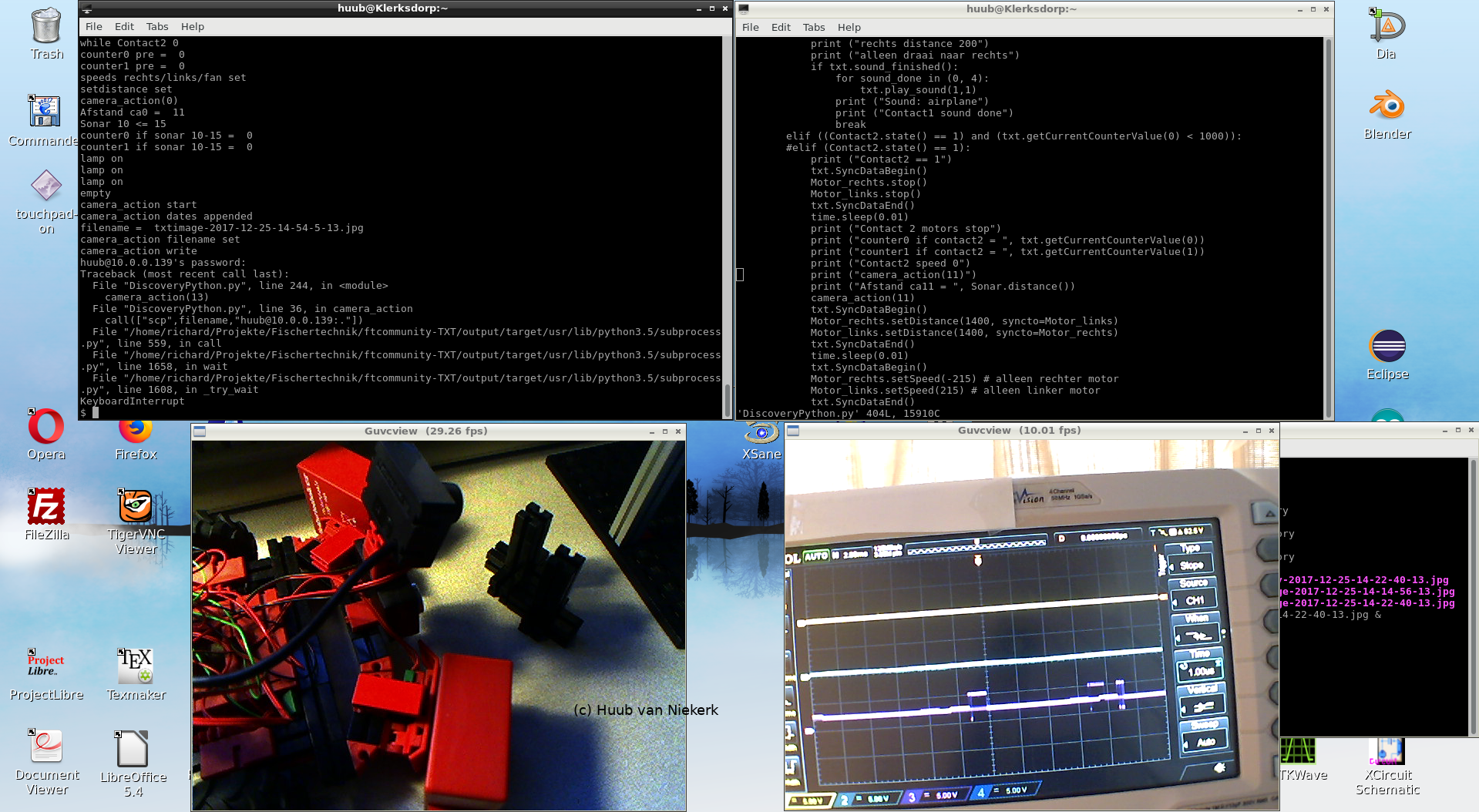
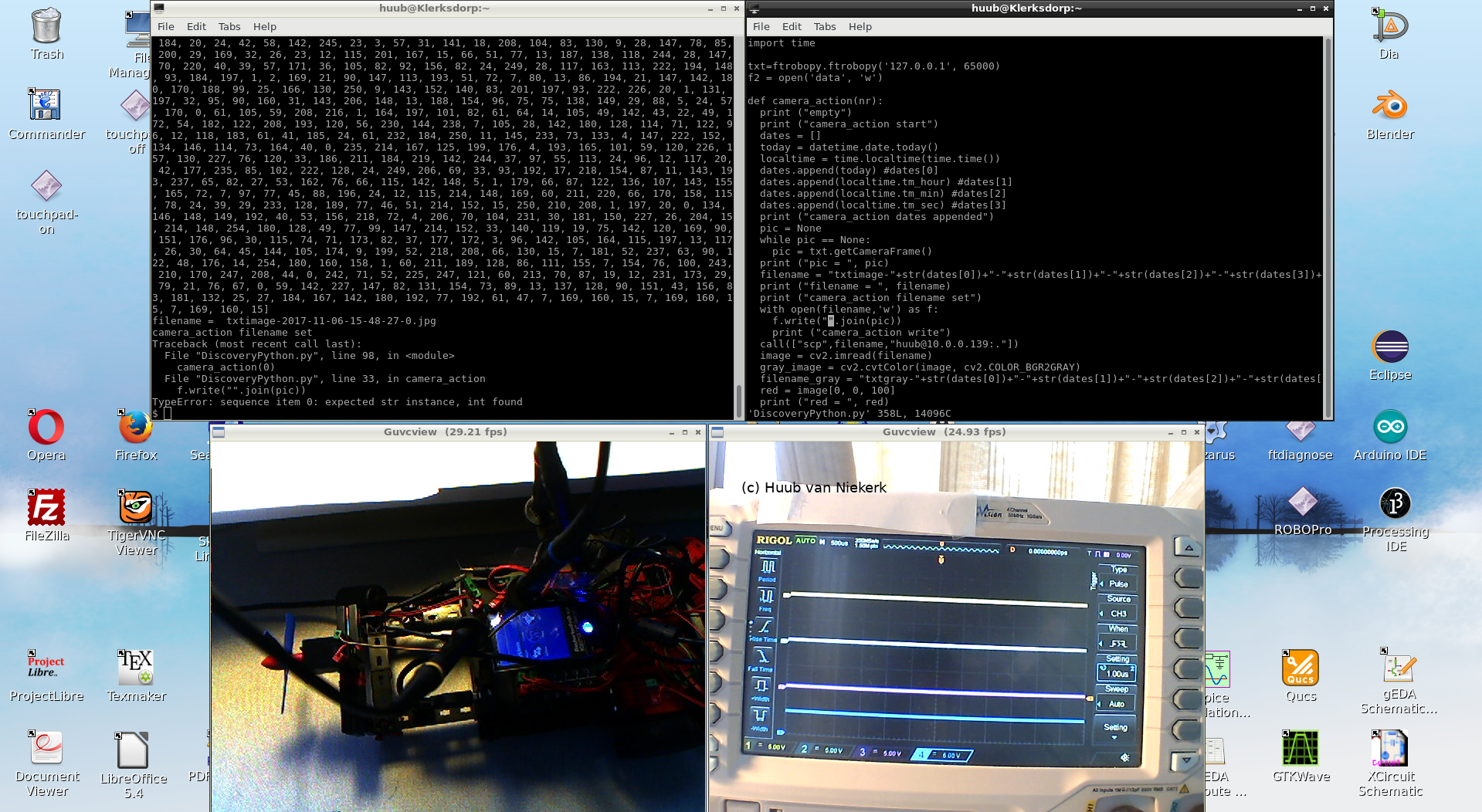
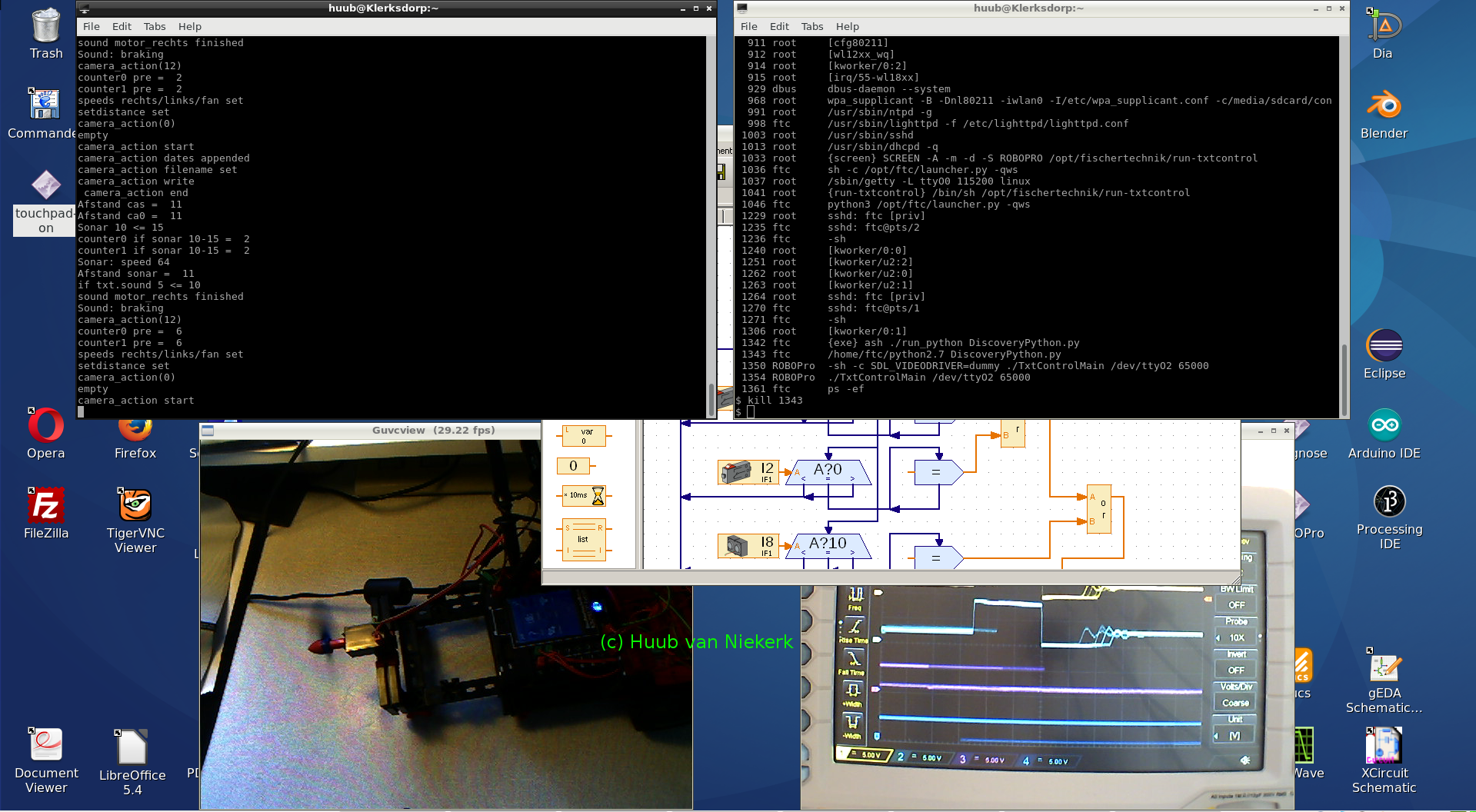
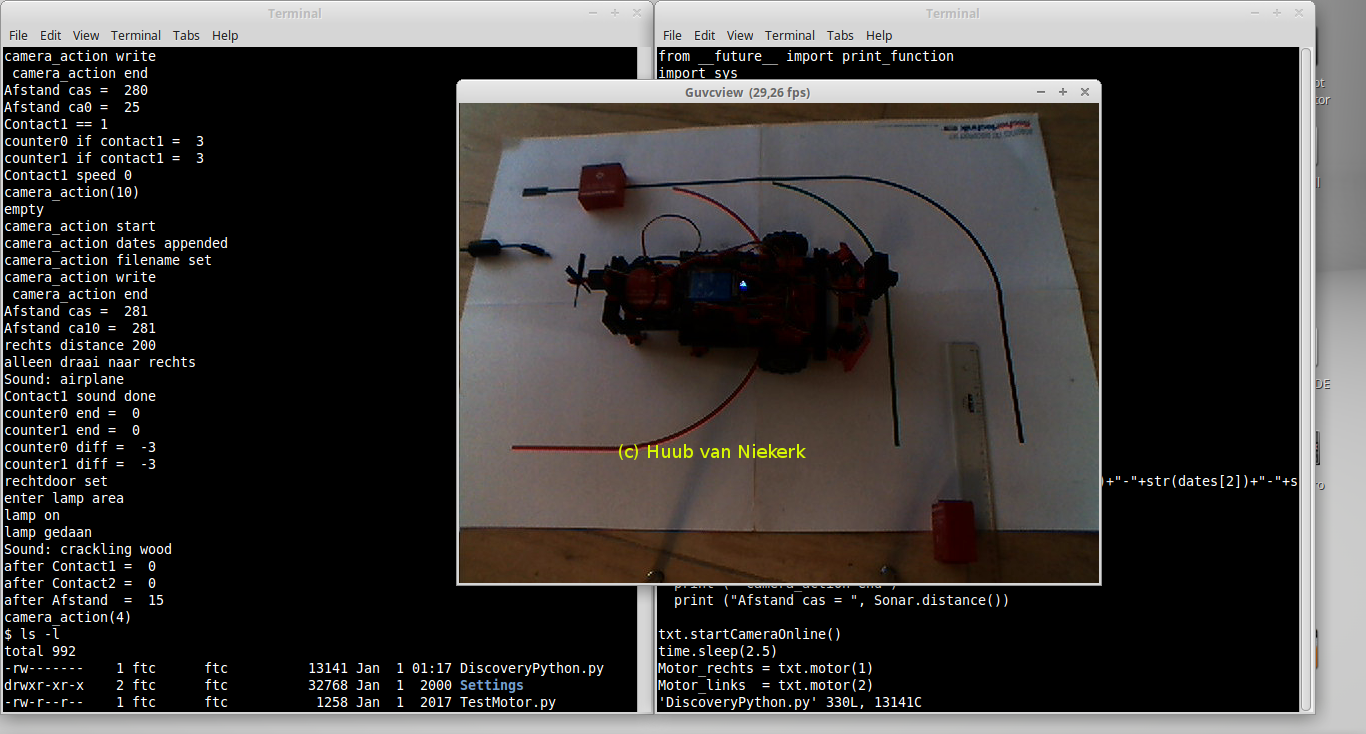
Discovery: Checking the algorithm for timing with camera and sensors. Adding some extra screenoutput to check. Does it work? Can it be tricked? Click the image to watch the video.
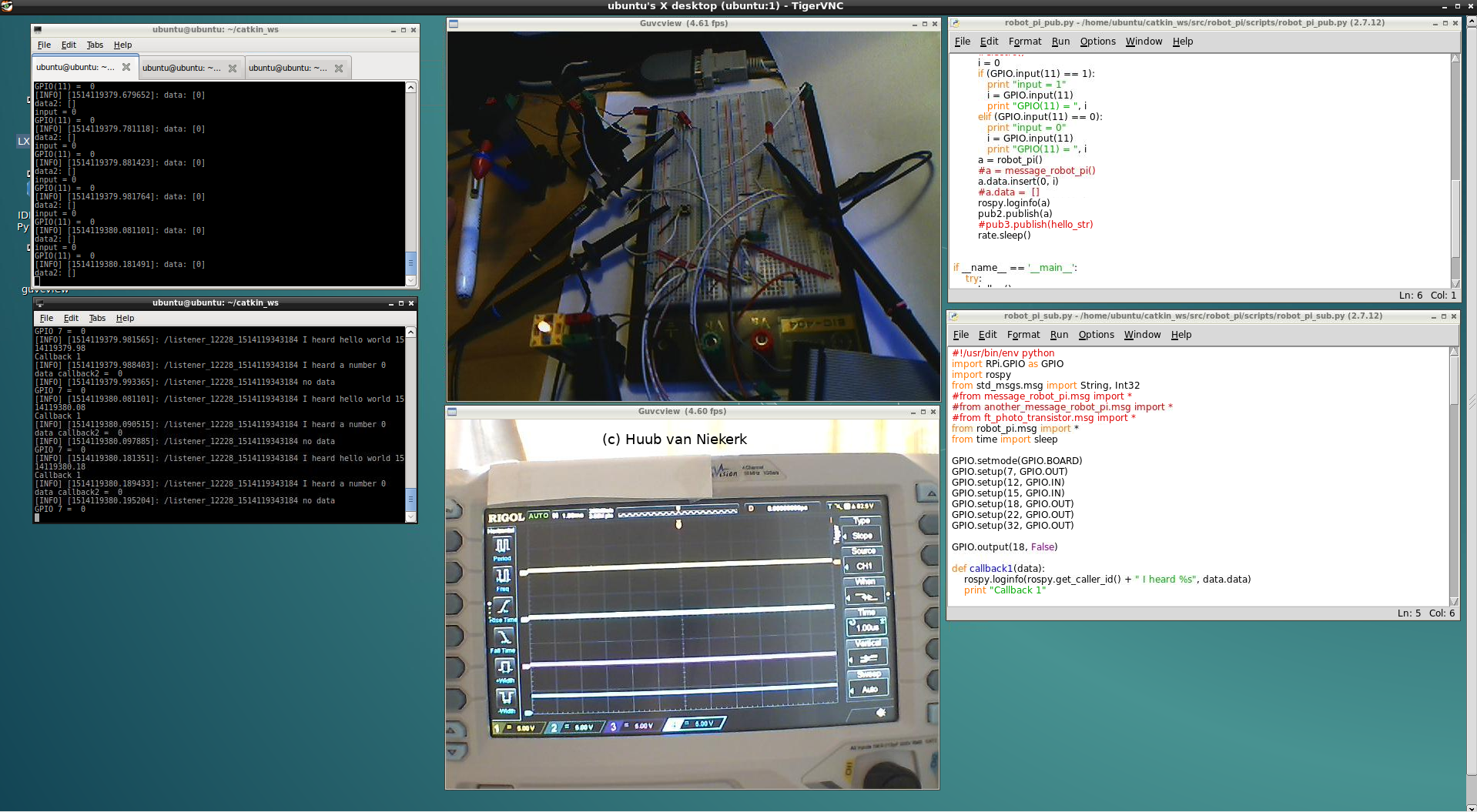
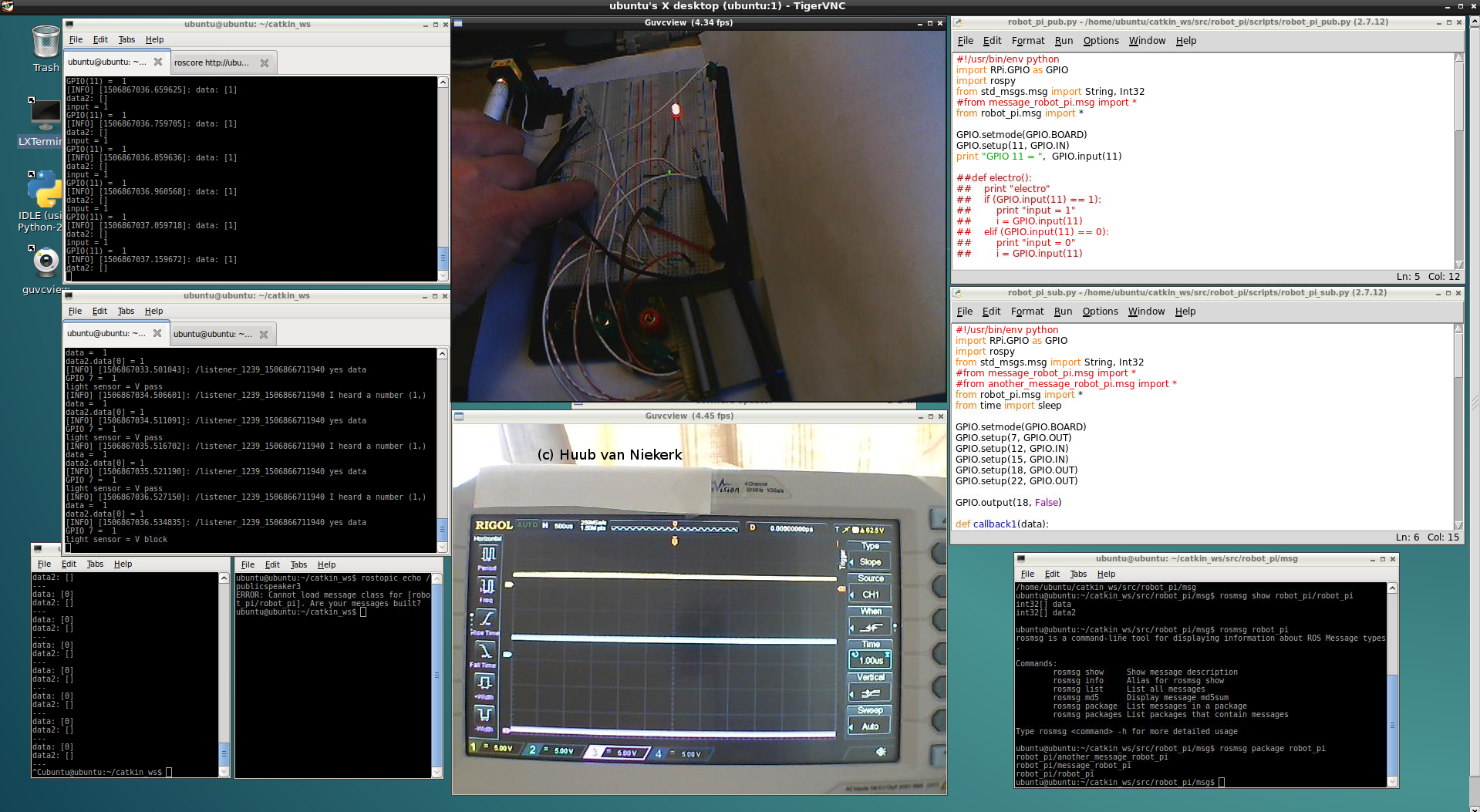
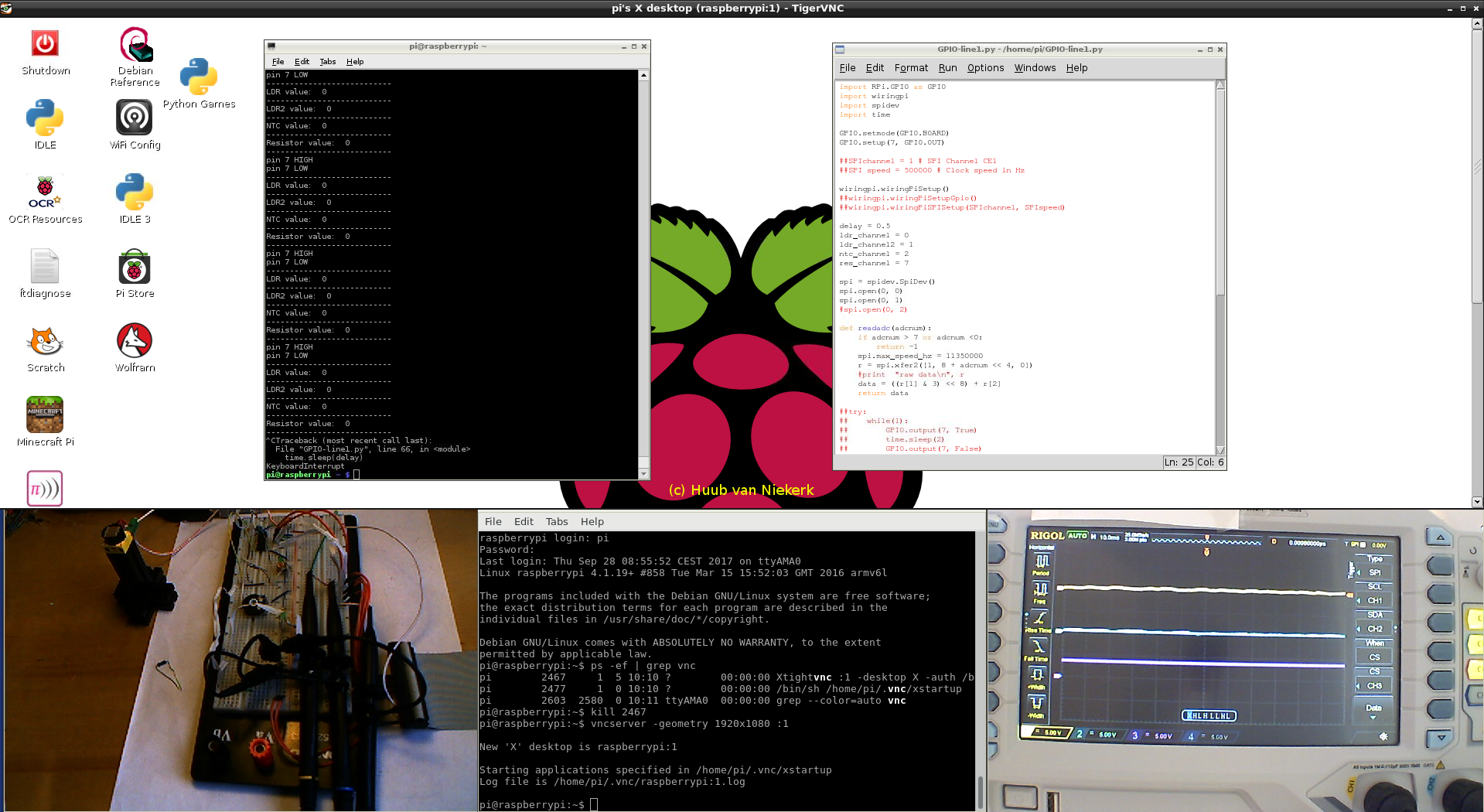
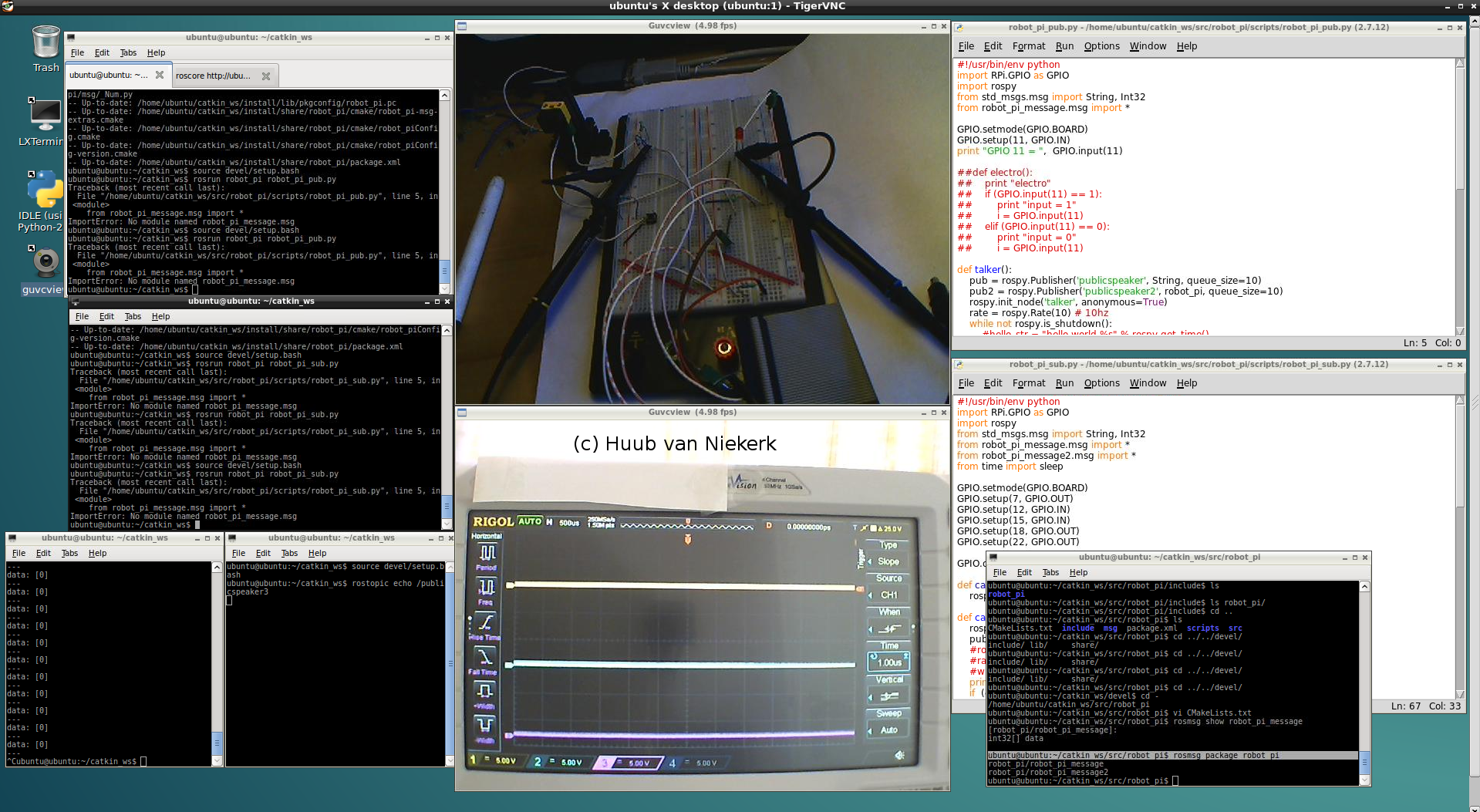
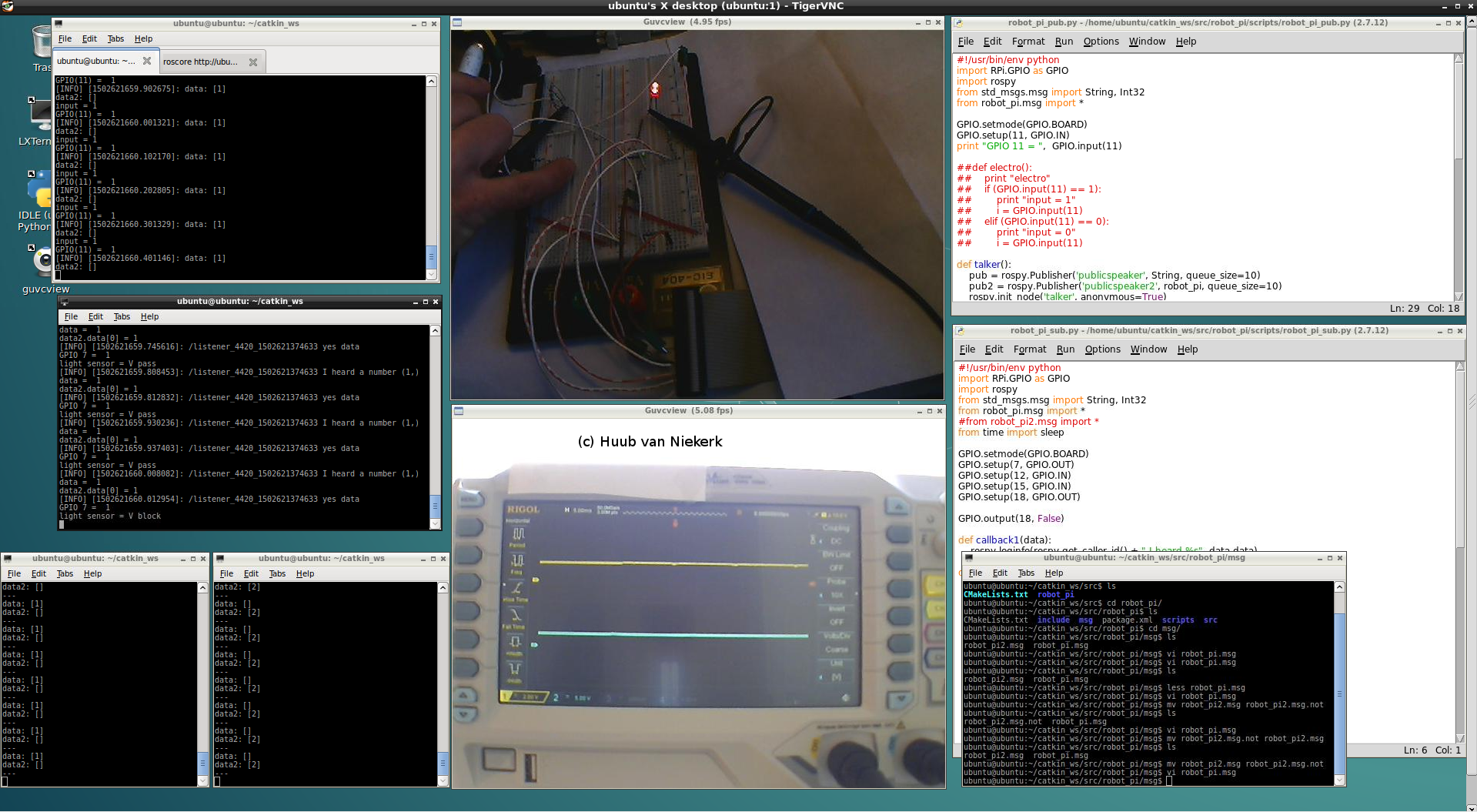
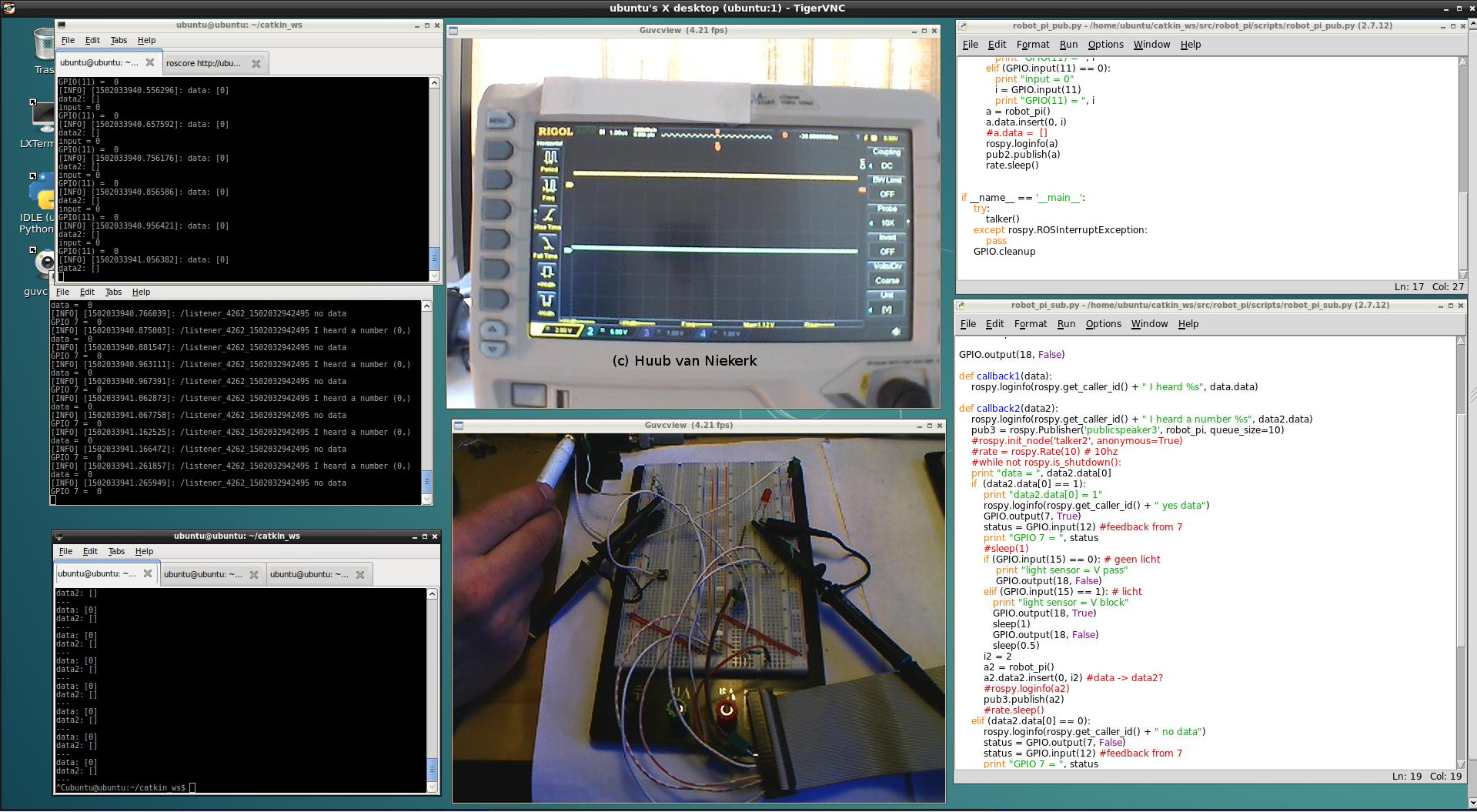
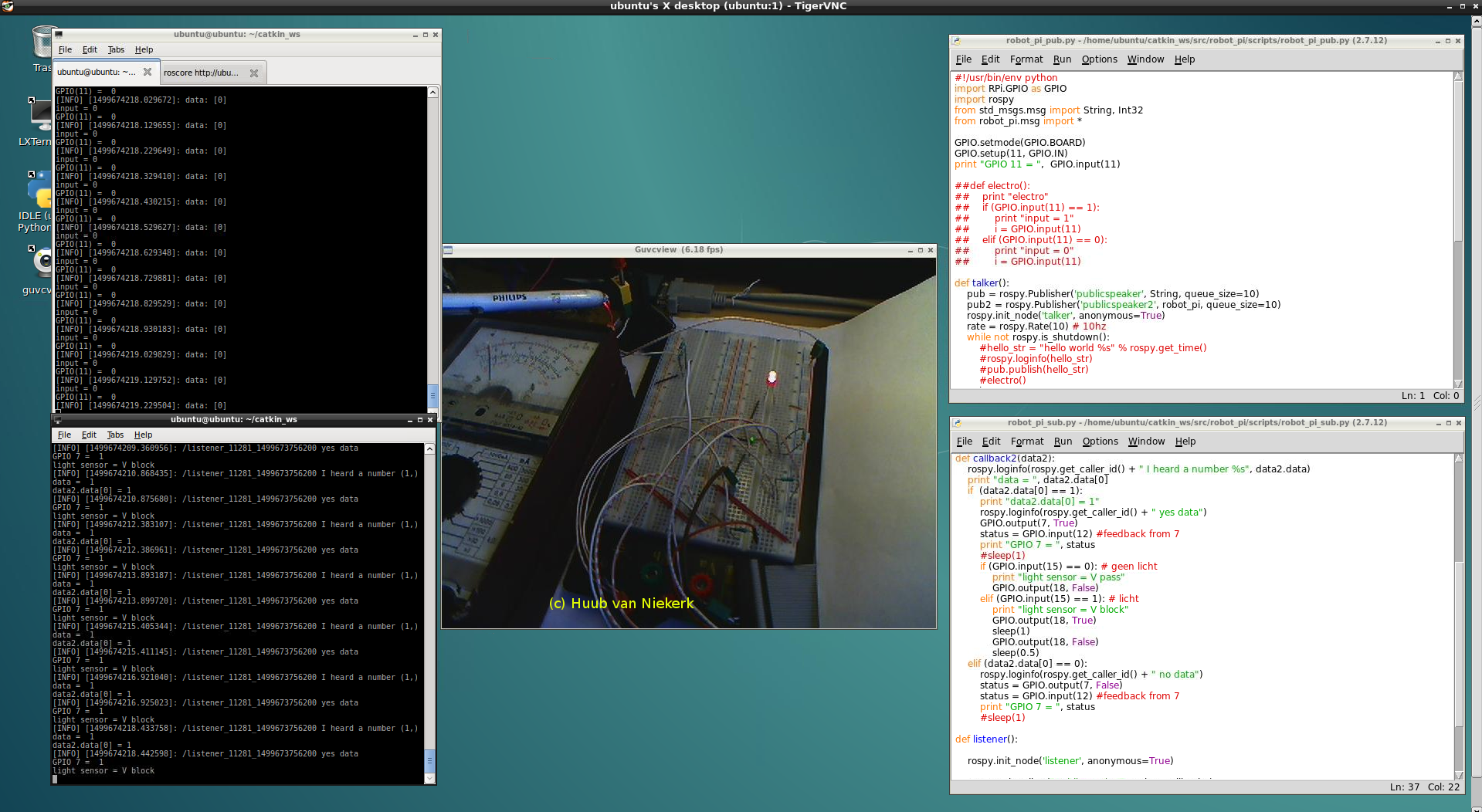
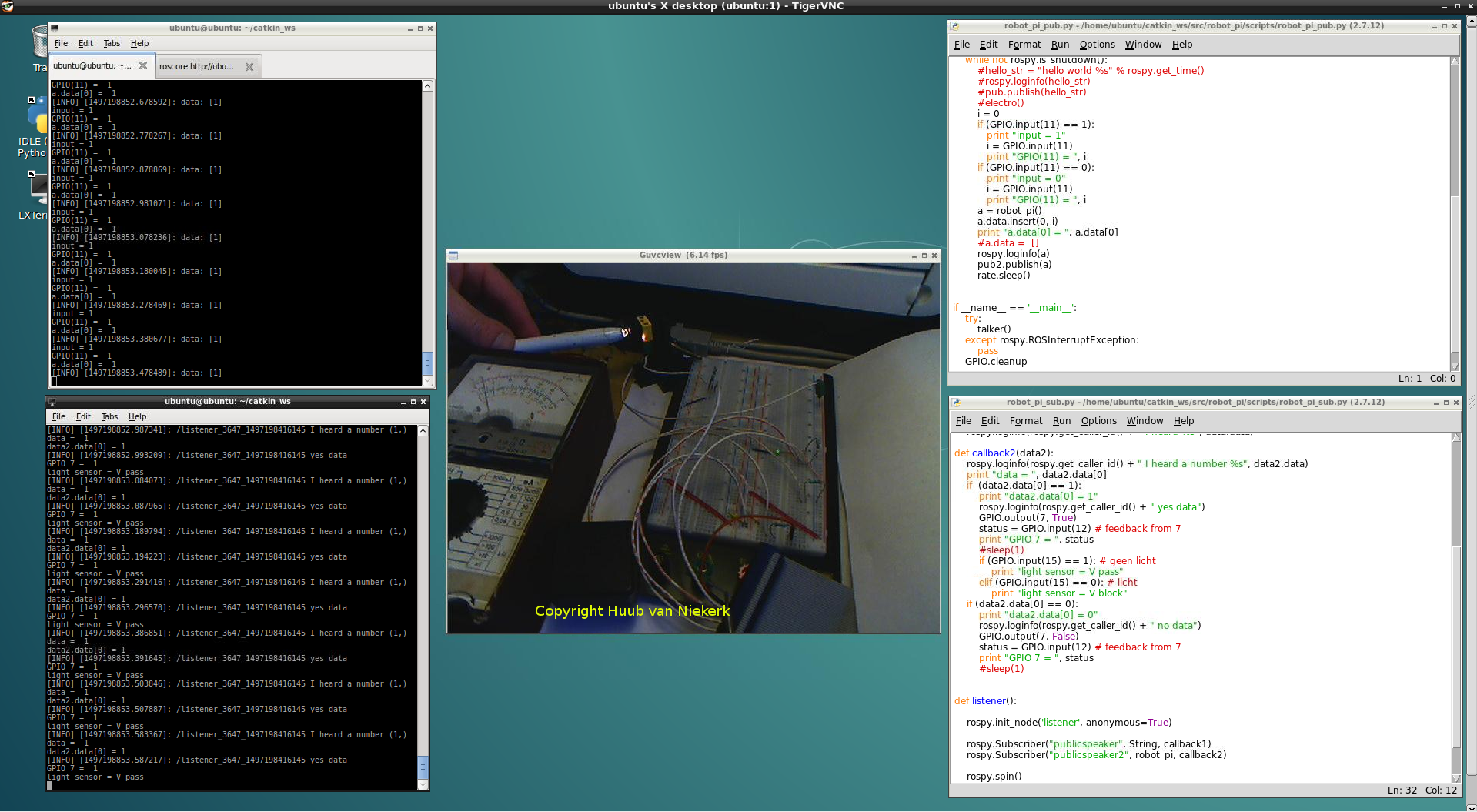
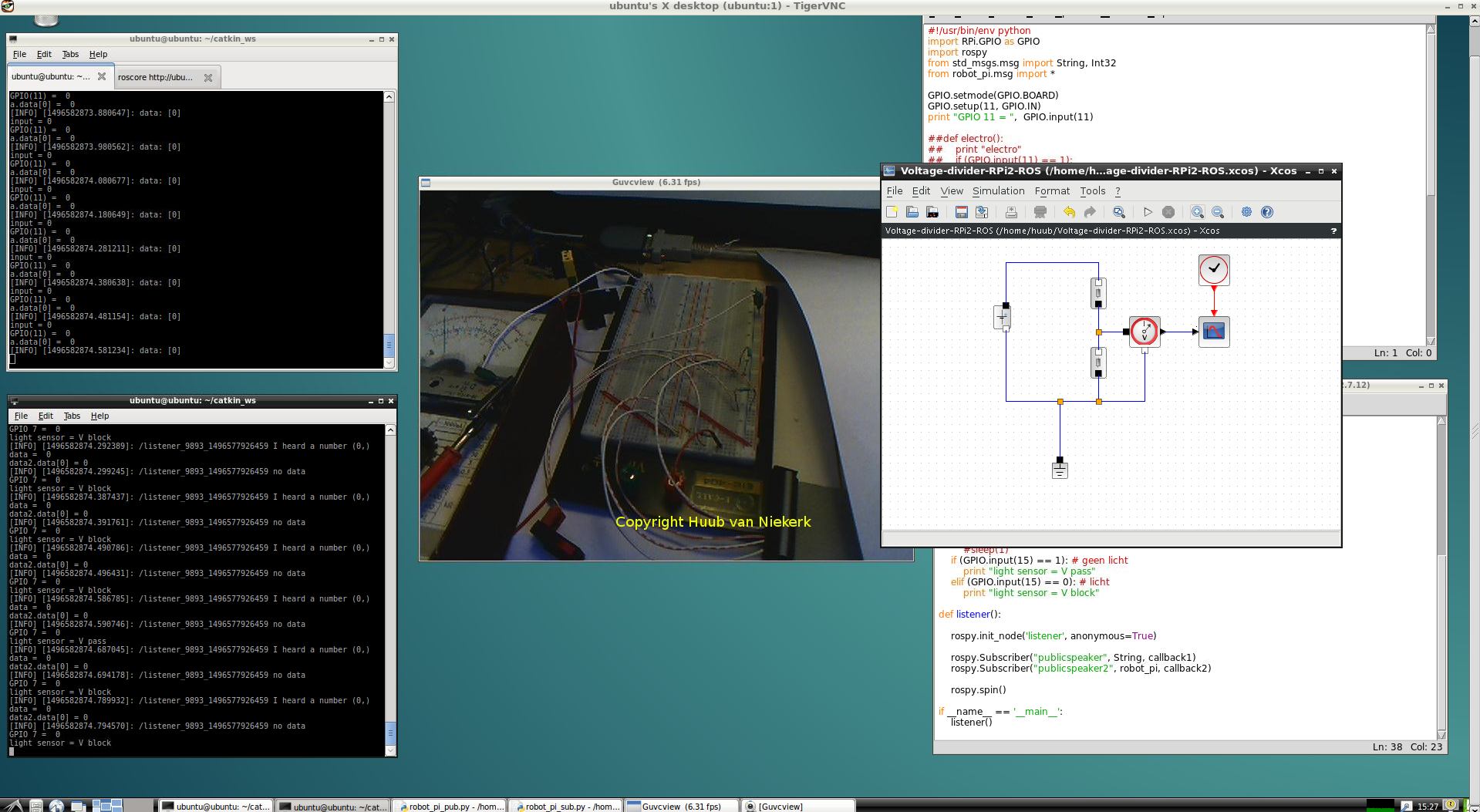
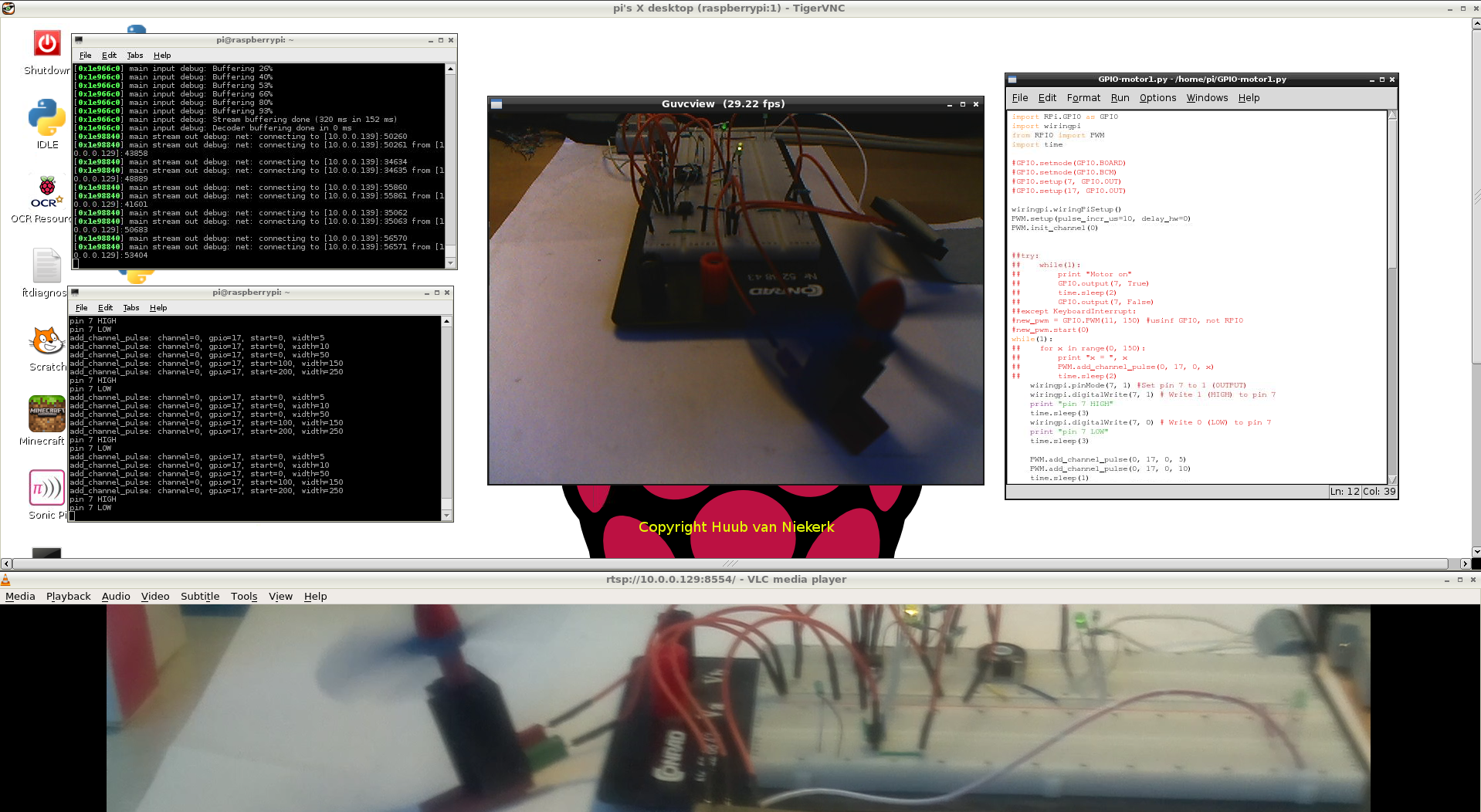
RaspberryPi2 & ROS: Starting with another attempt to solve message problem which seems to work. Then rewiring the motor and changing the code accordingly. Final test to see if the solution(s) still work. Click the image to watch the video.
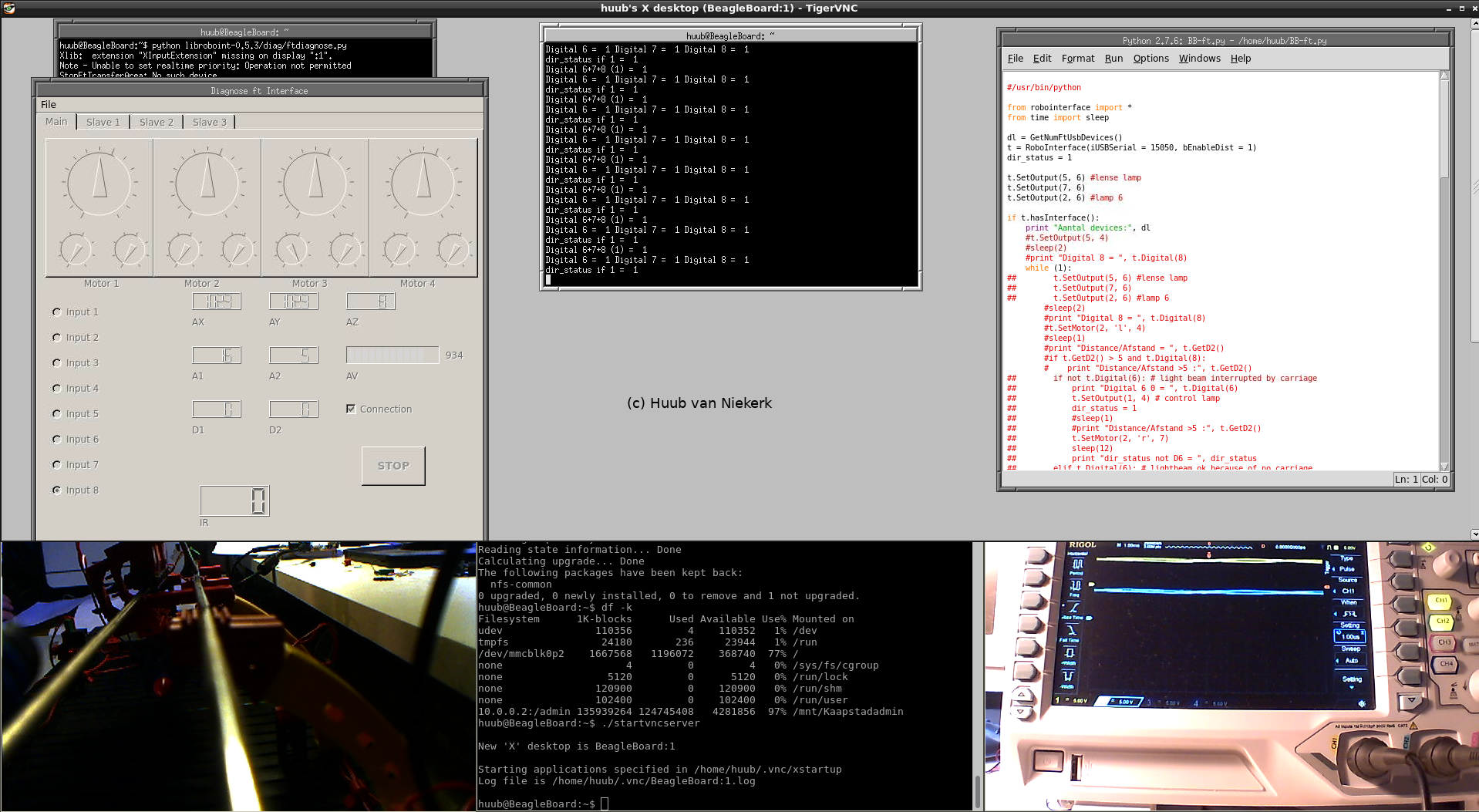
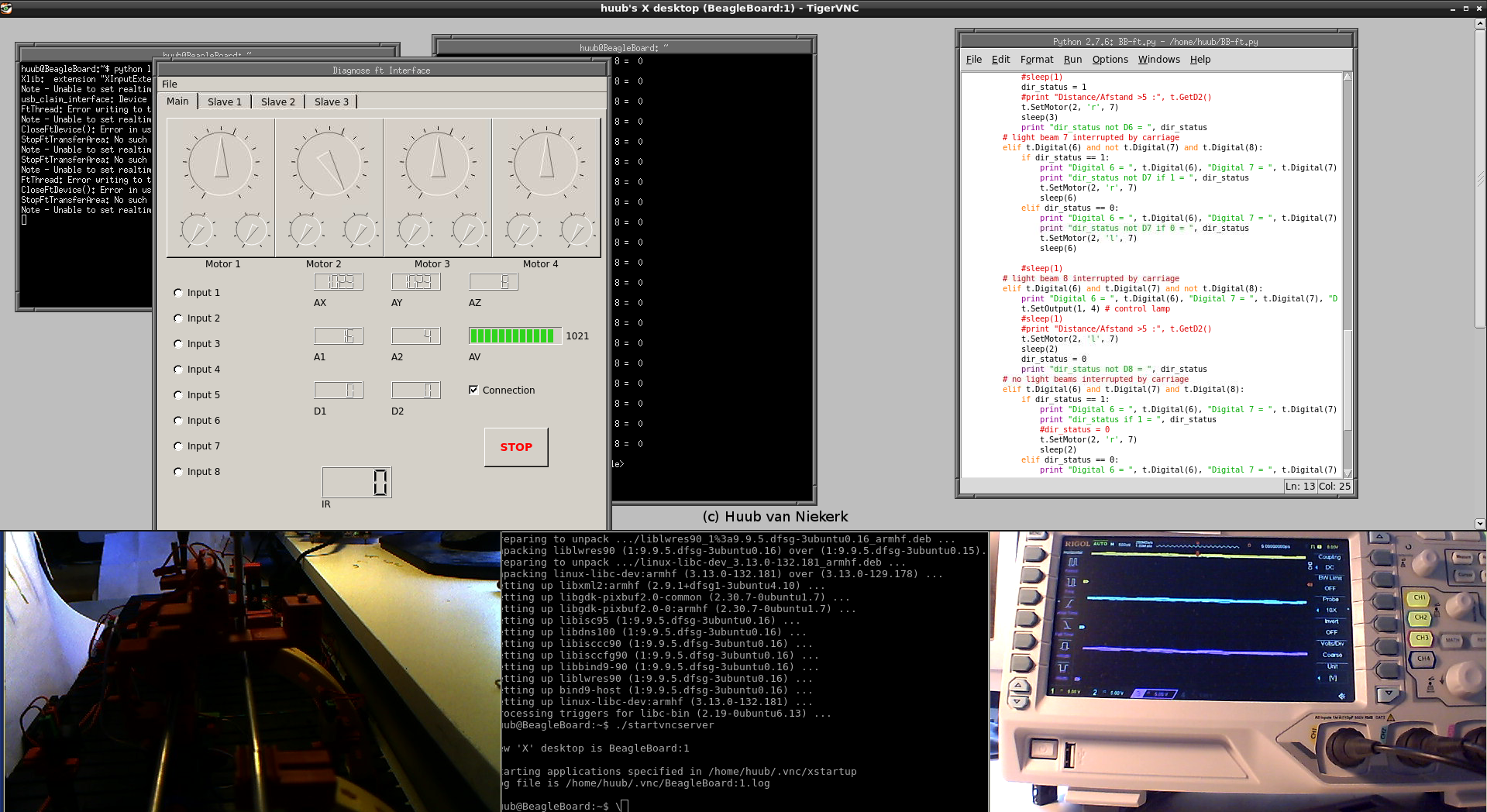
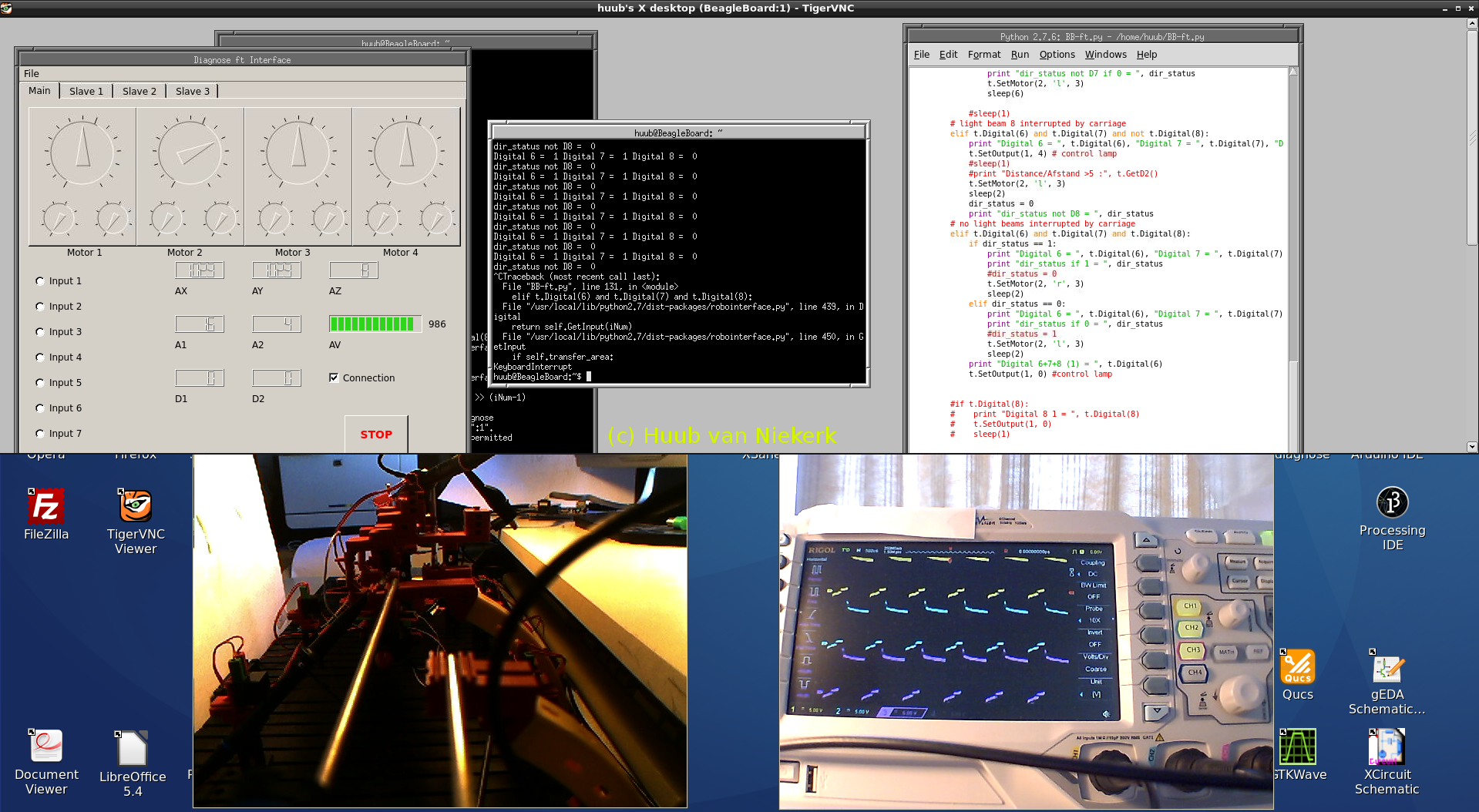
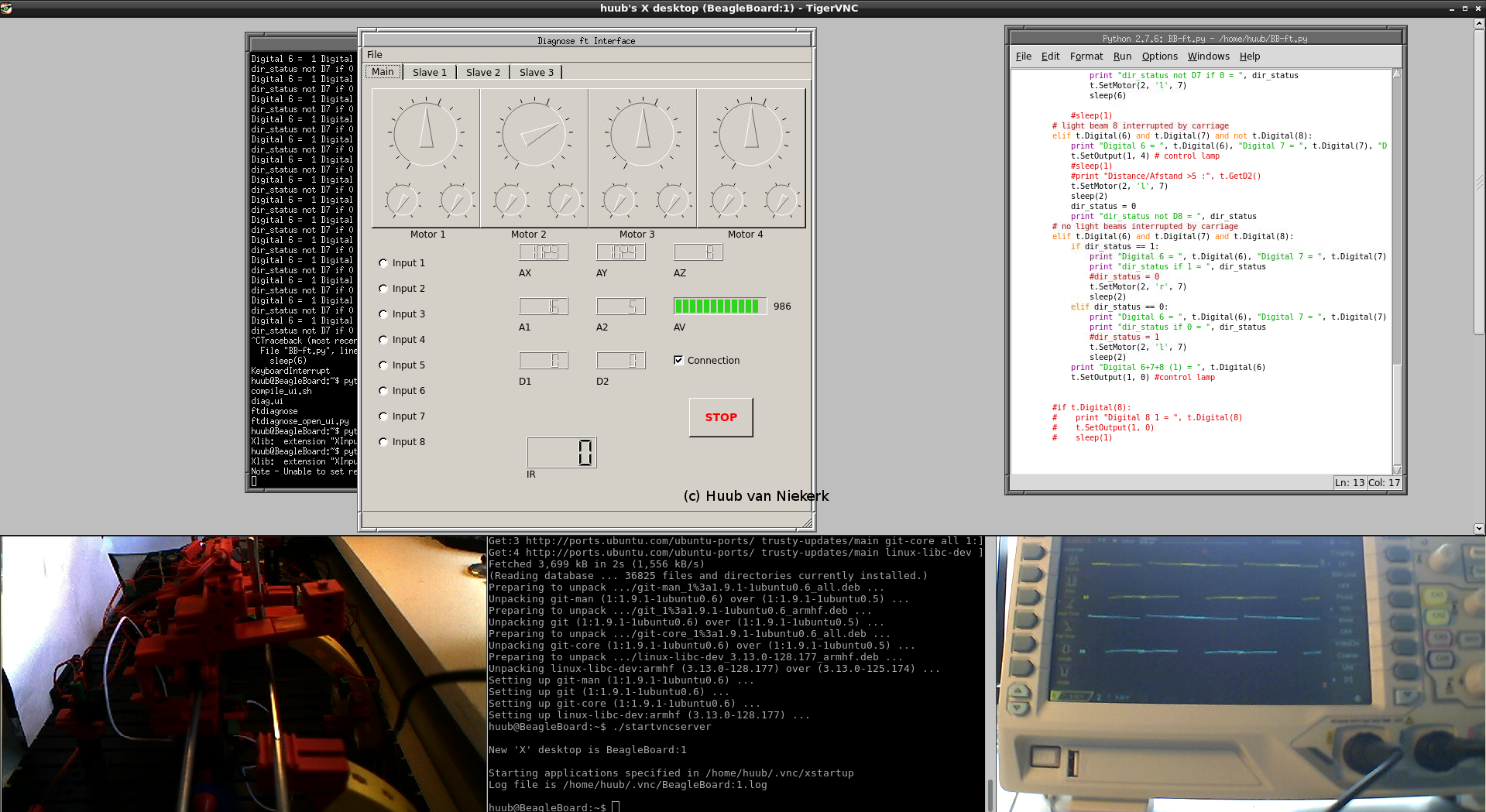
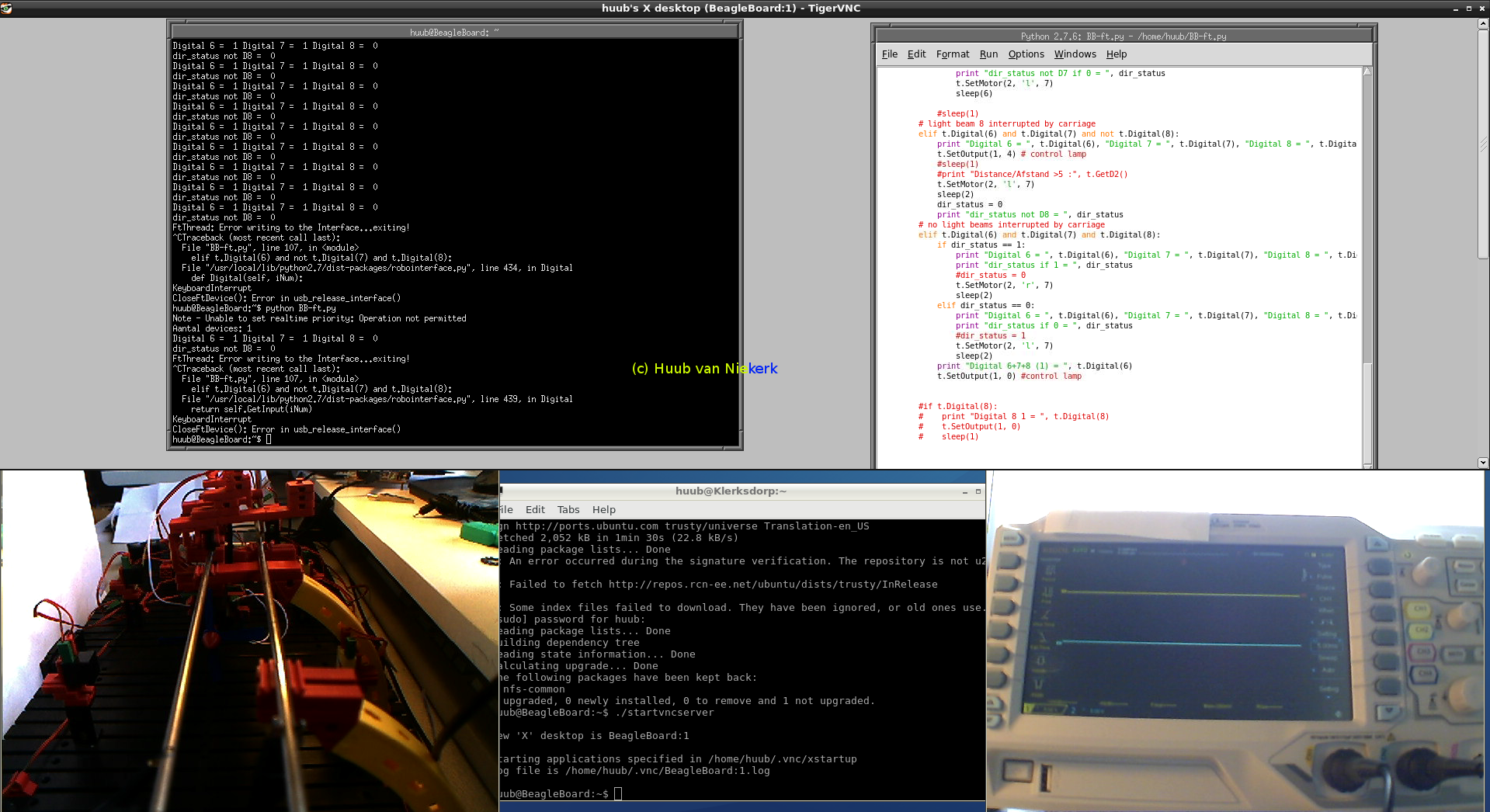
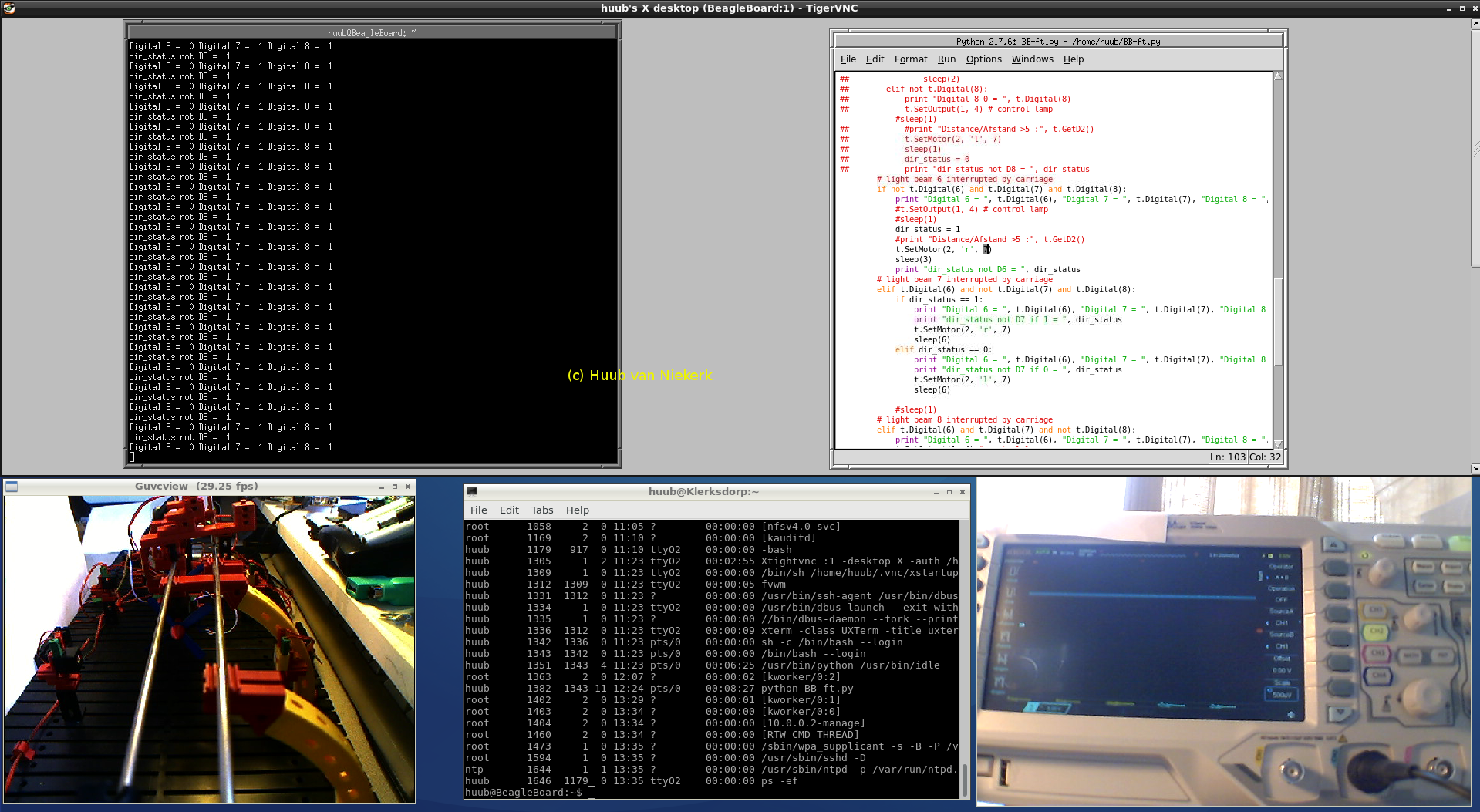
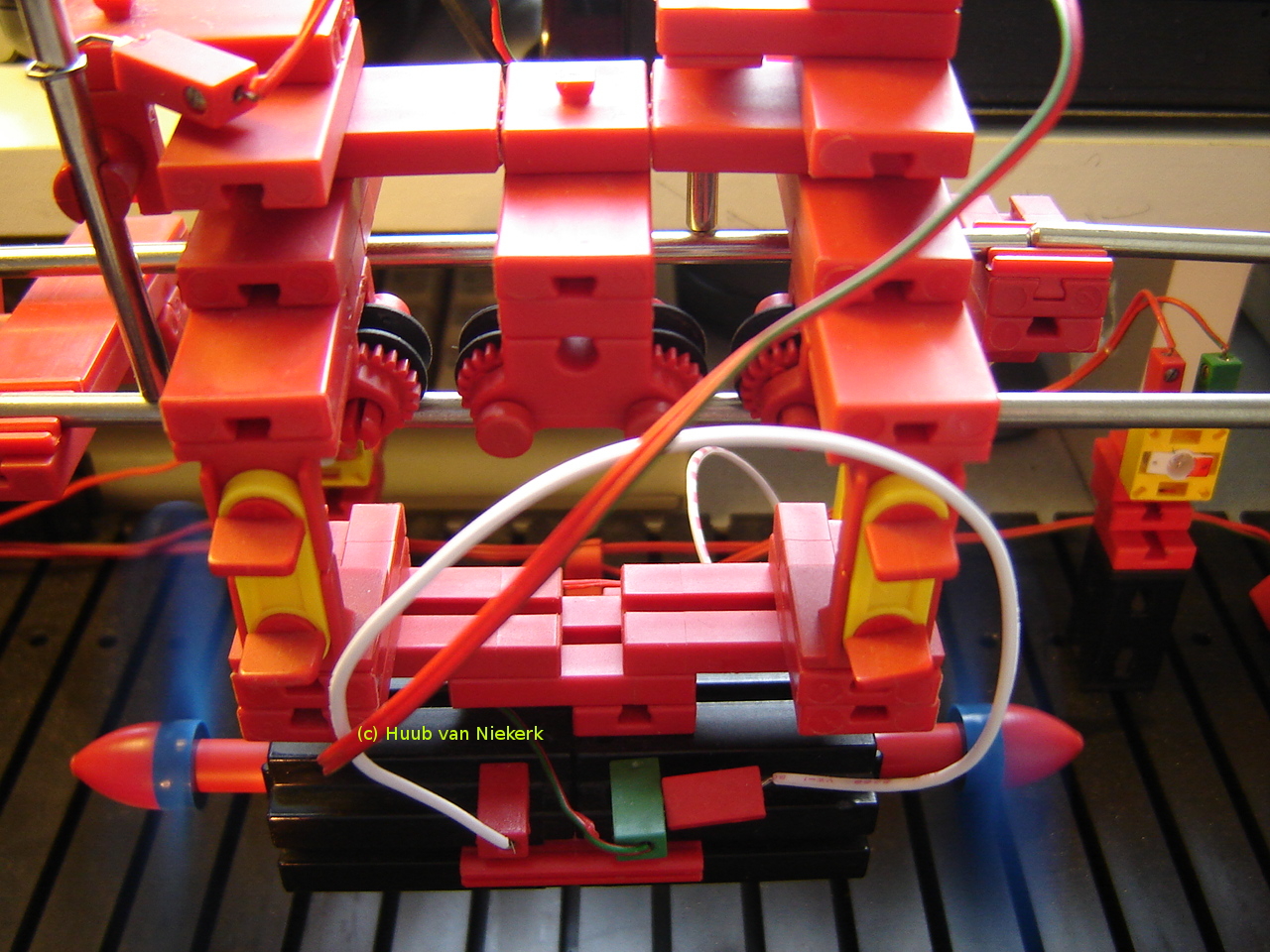
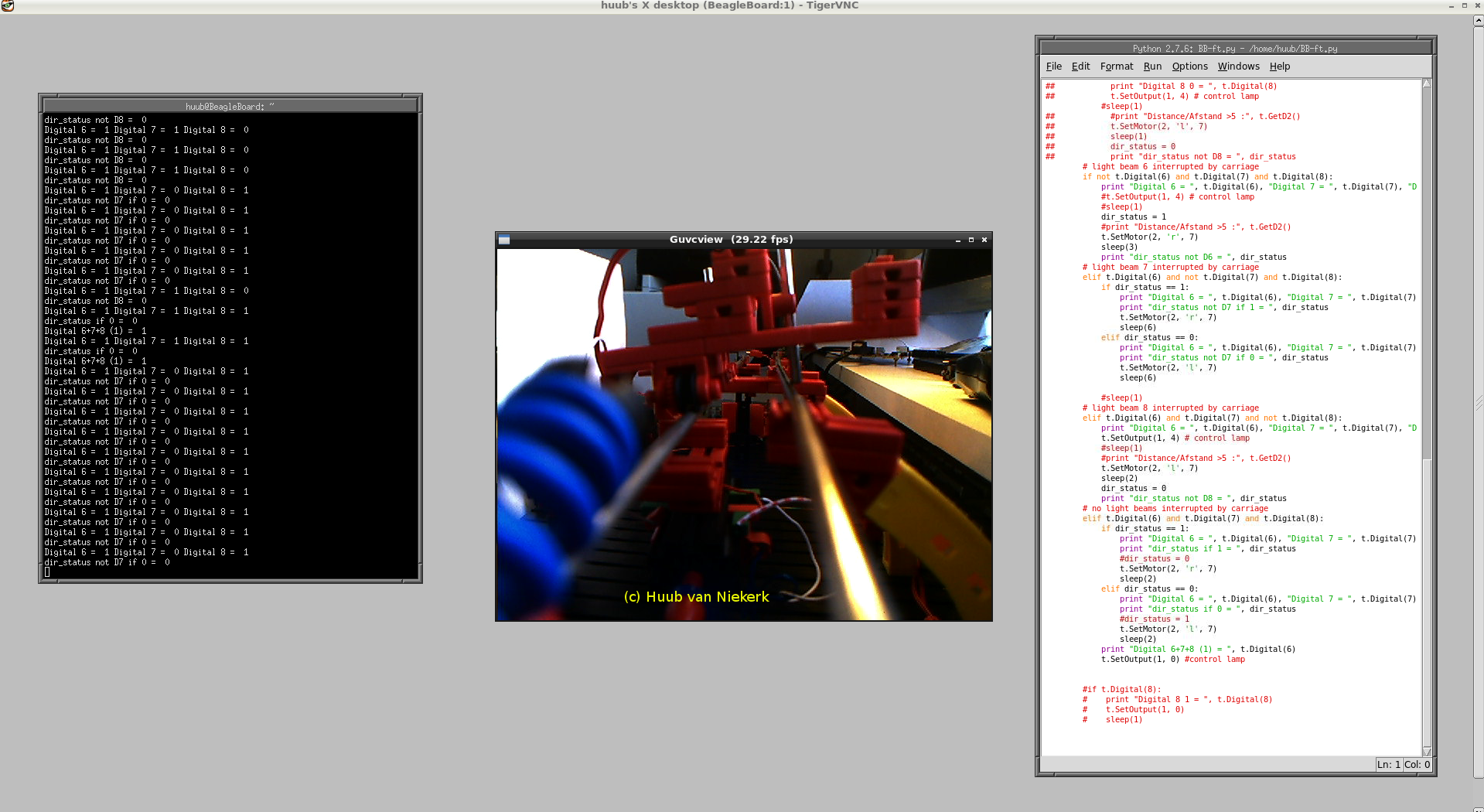
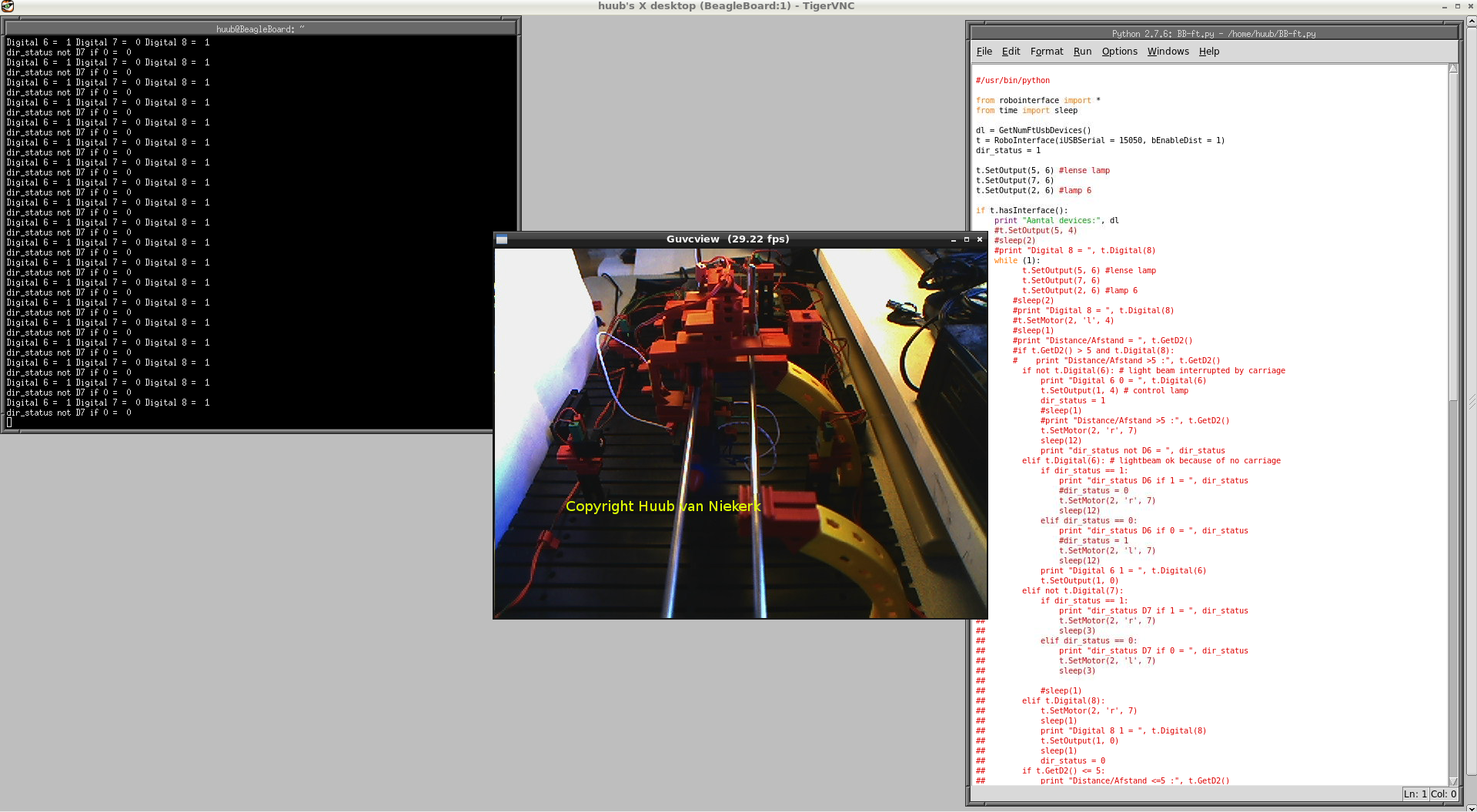
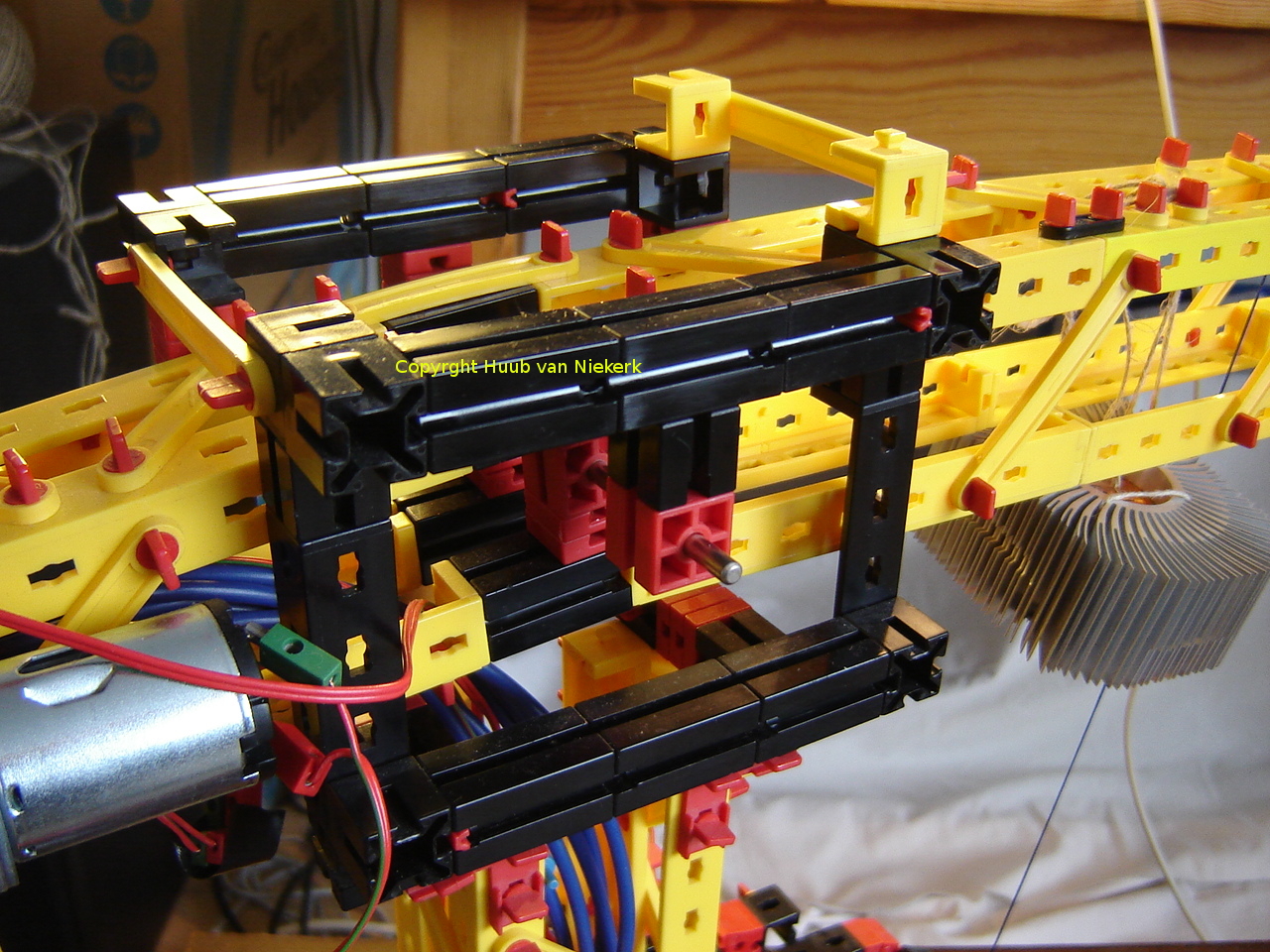
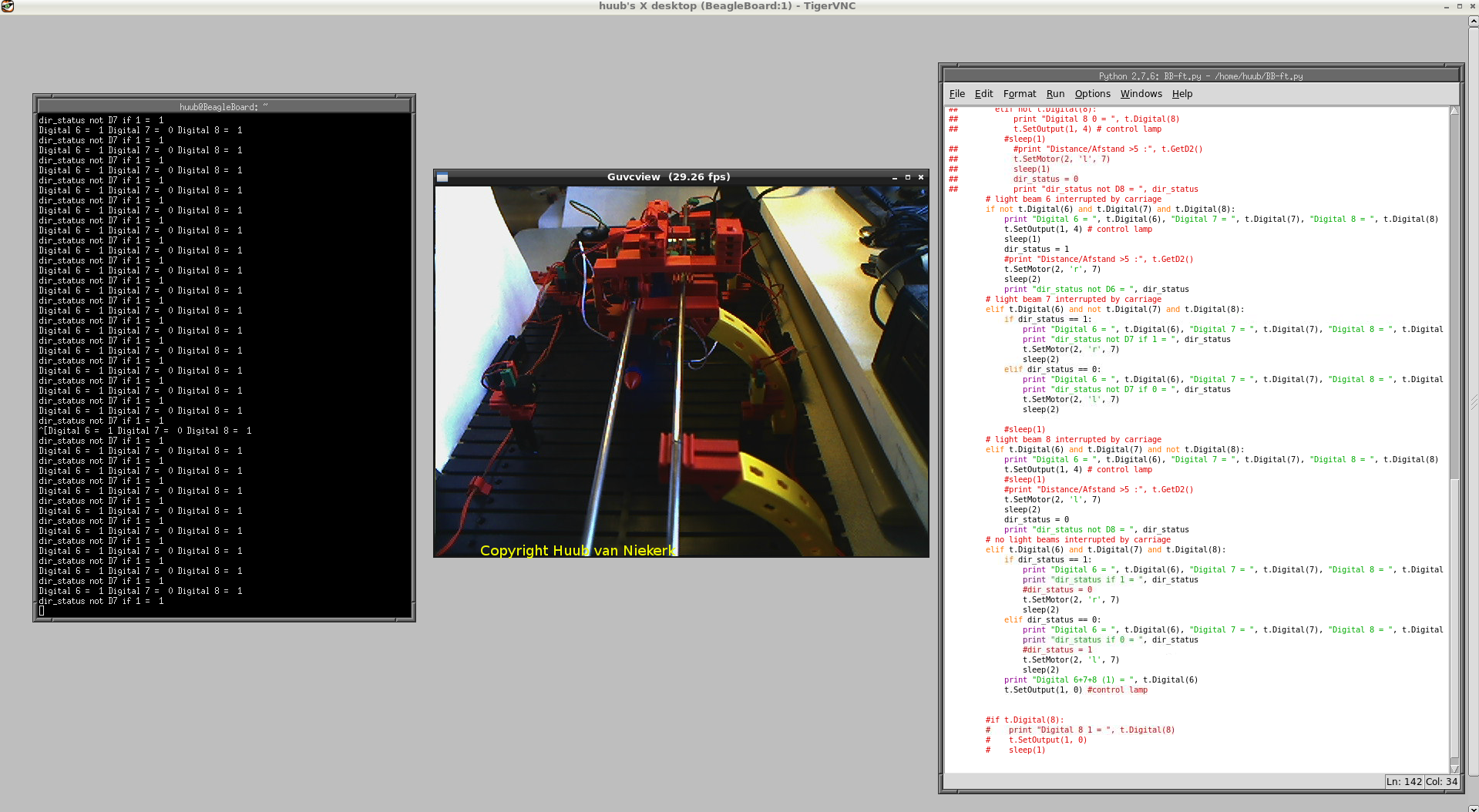
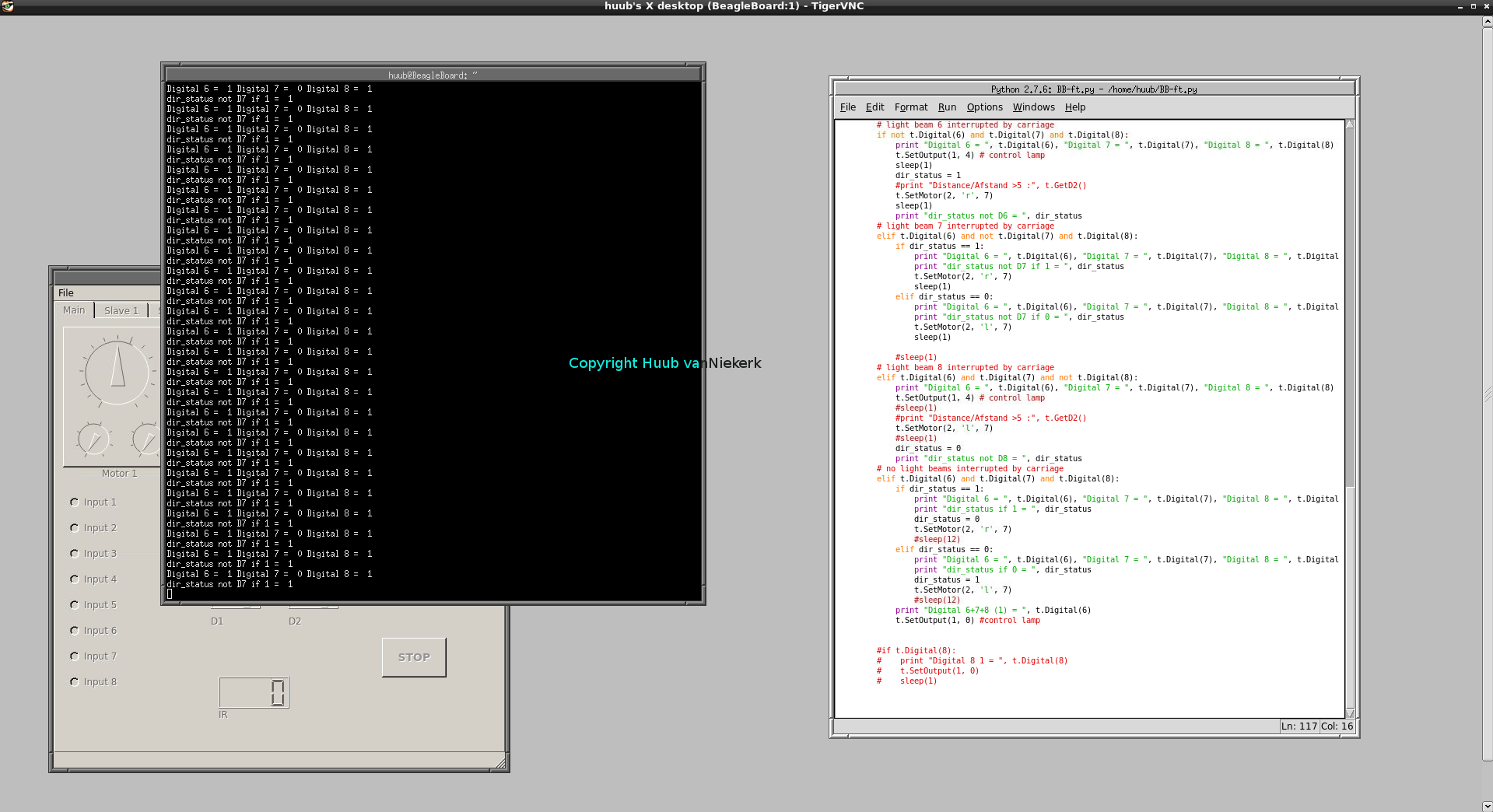
BeagleBoard & monorail: After the last reconstruction, a real make-over for the frame seems in order but first some tests since signals don't show. But why? Connection? Wiring? A big oops later and a decision is made. Click the image to watch the video.
22 December
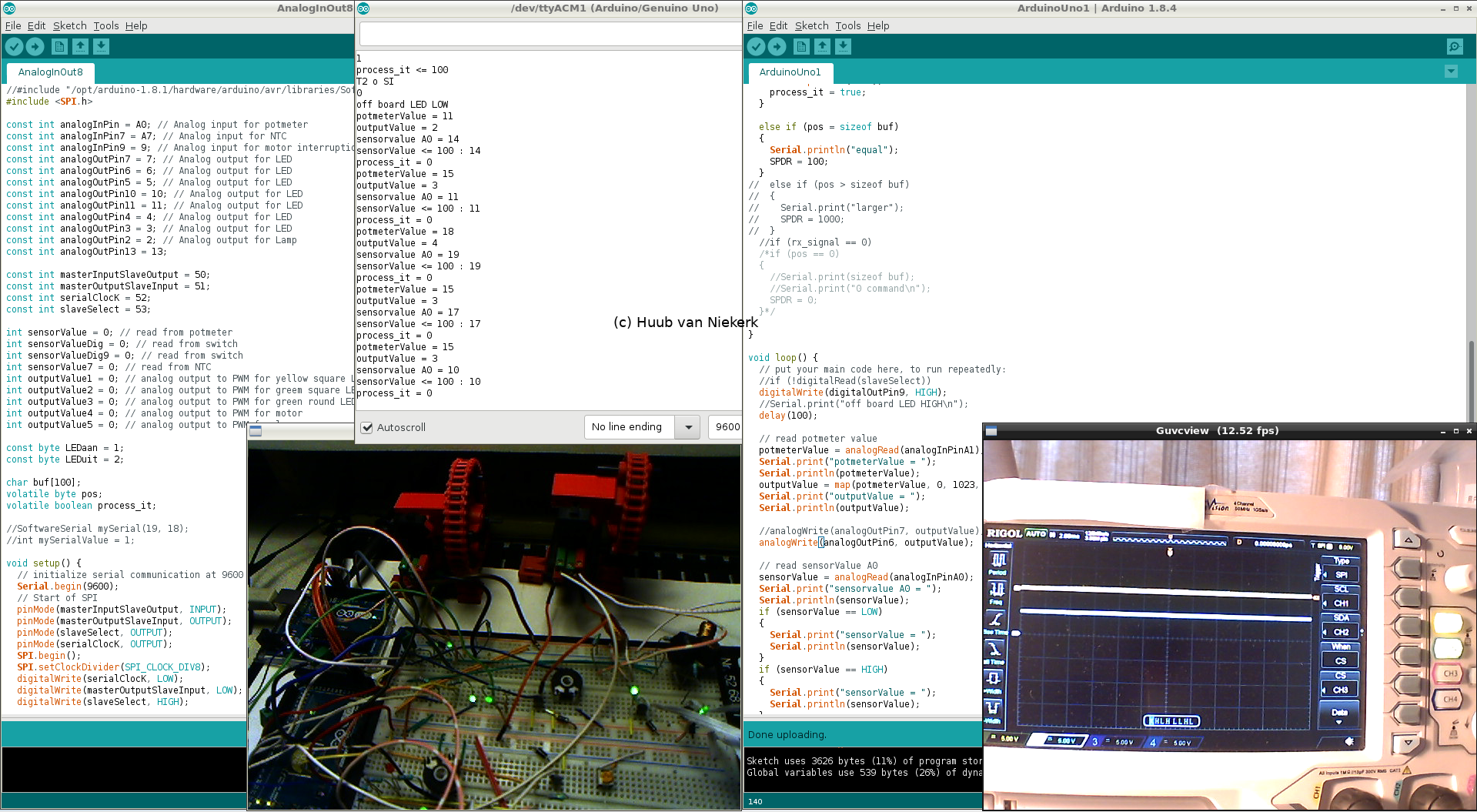
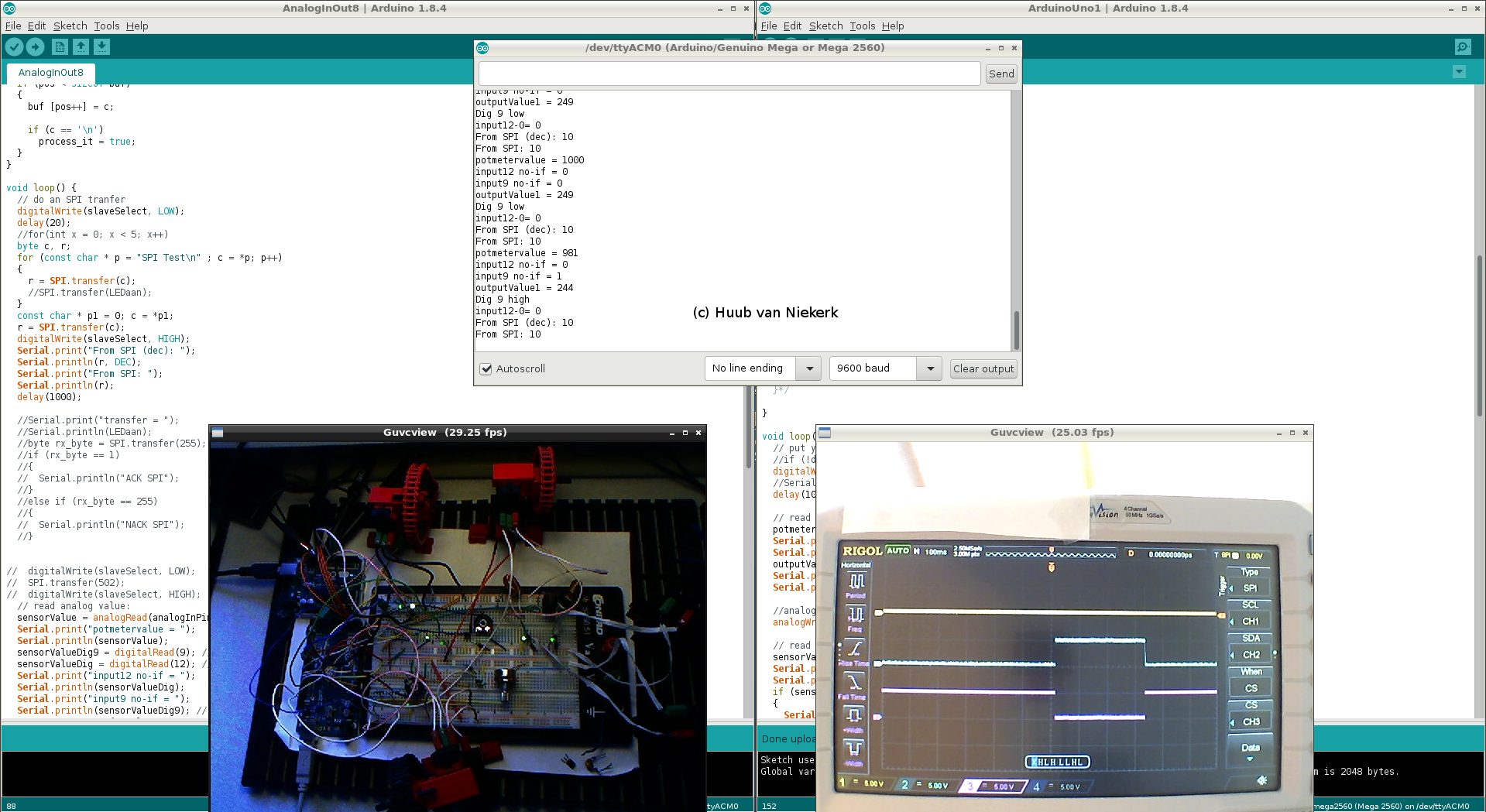
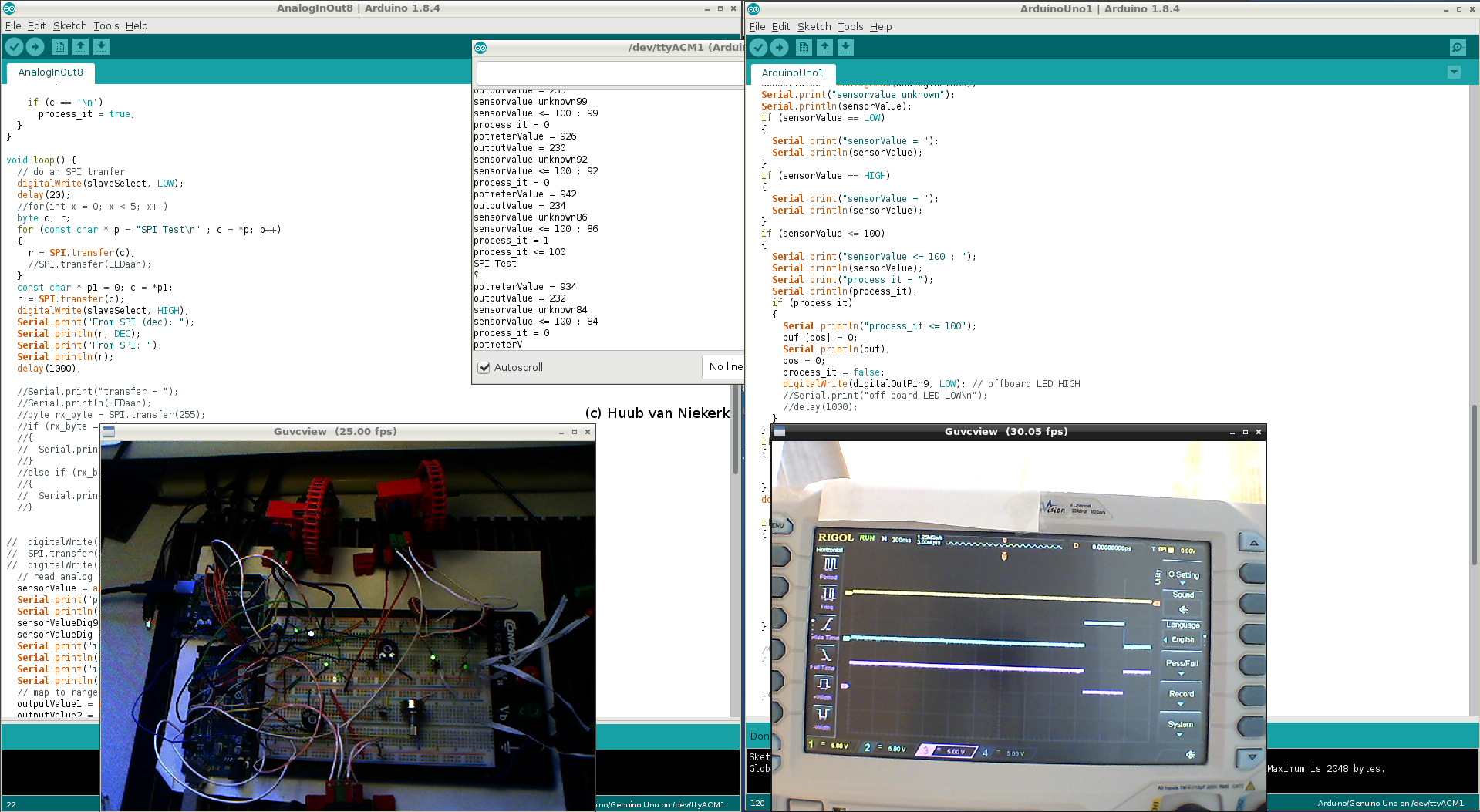
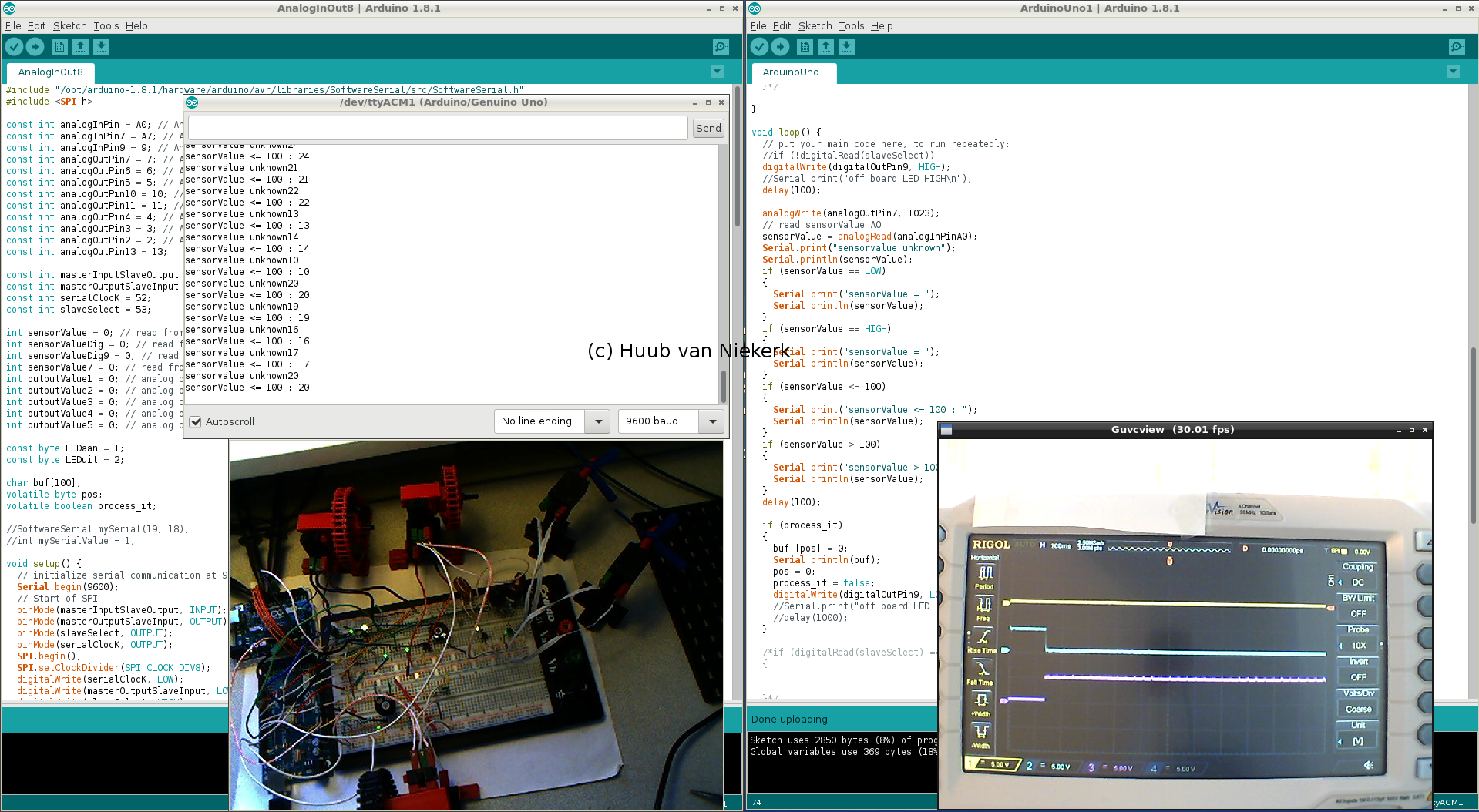
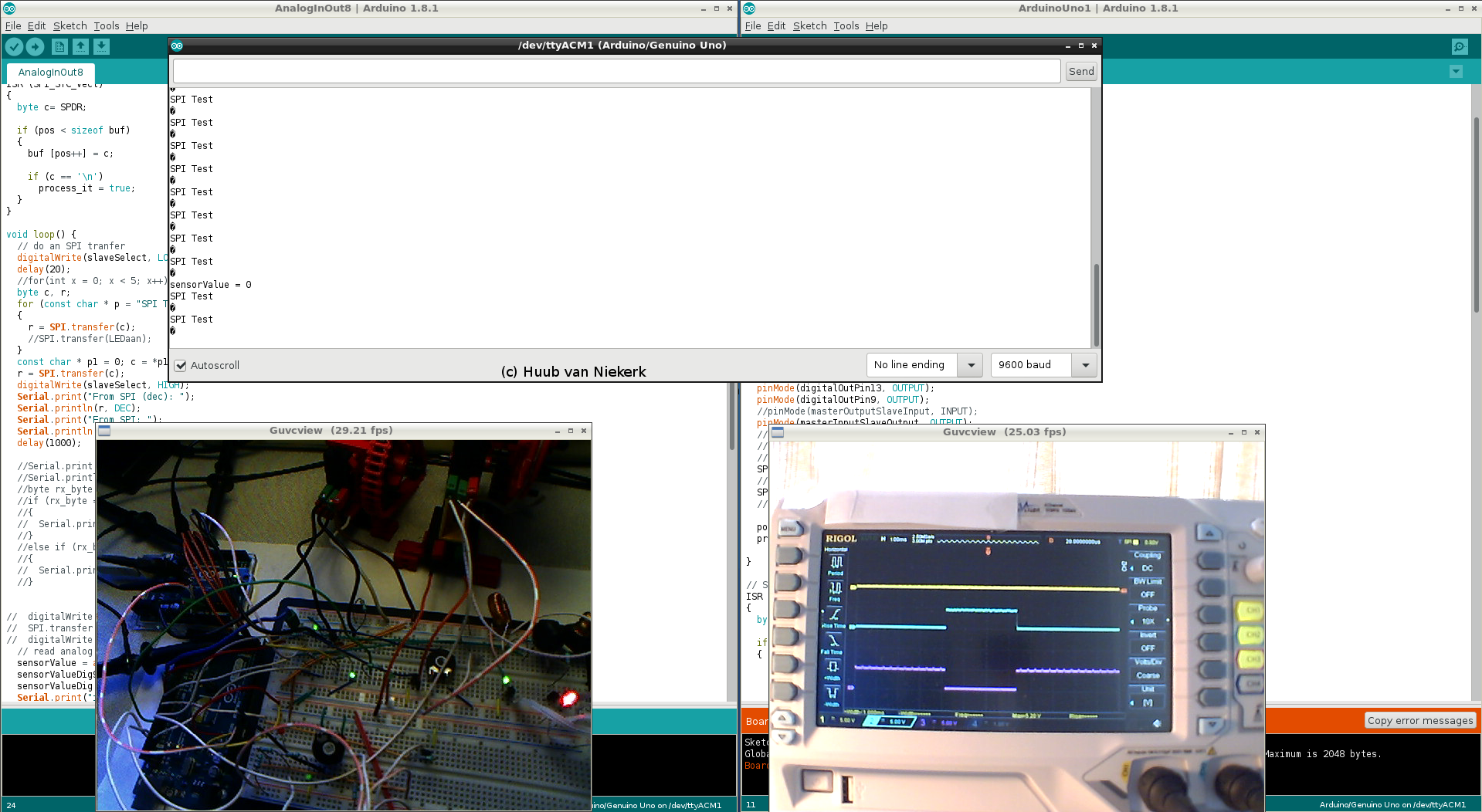
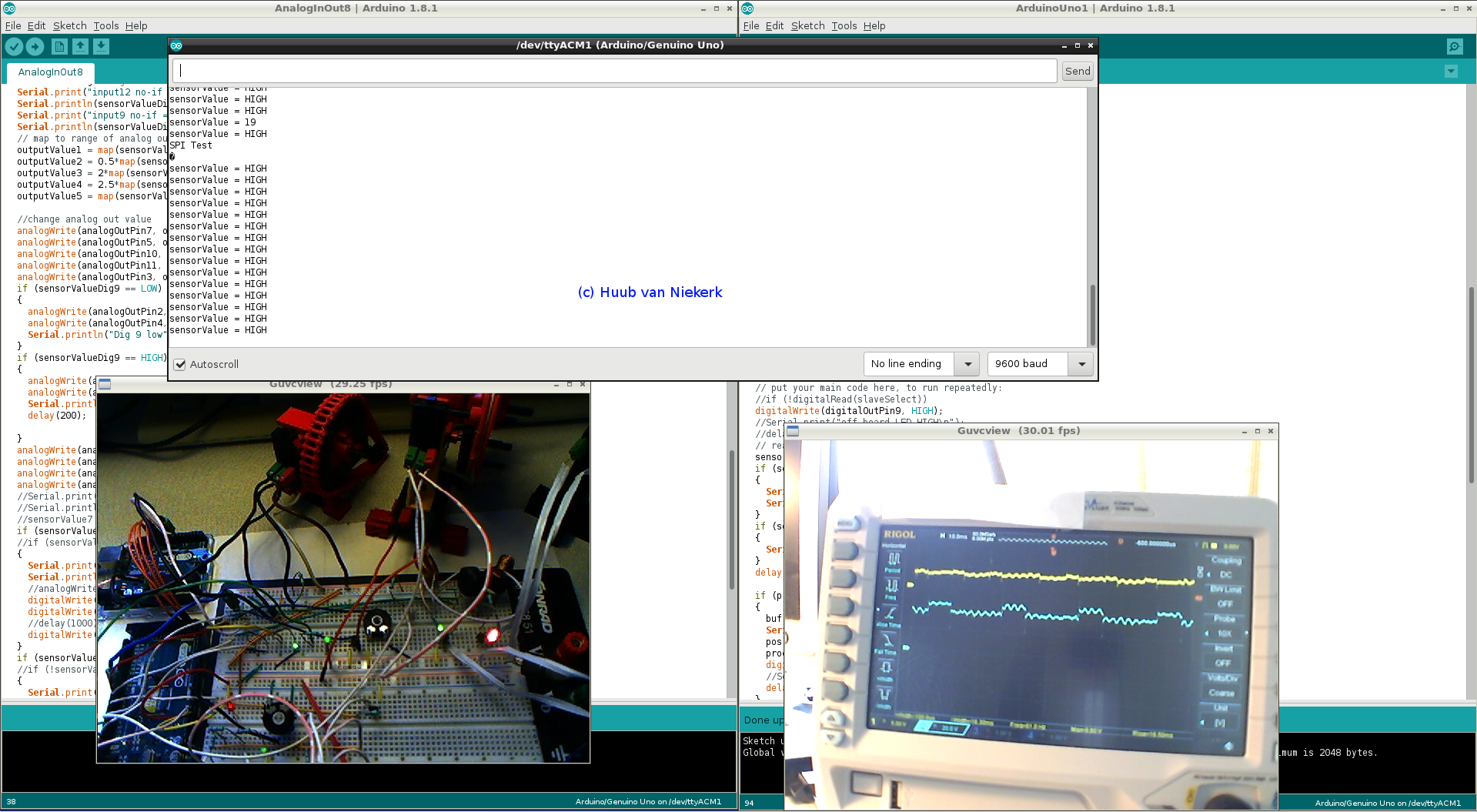
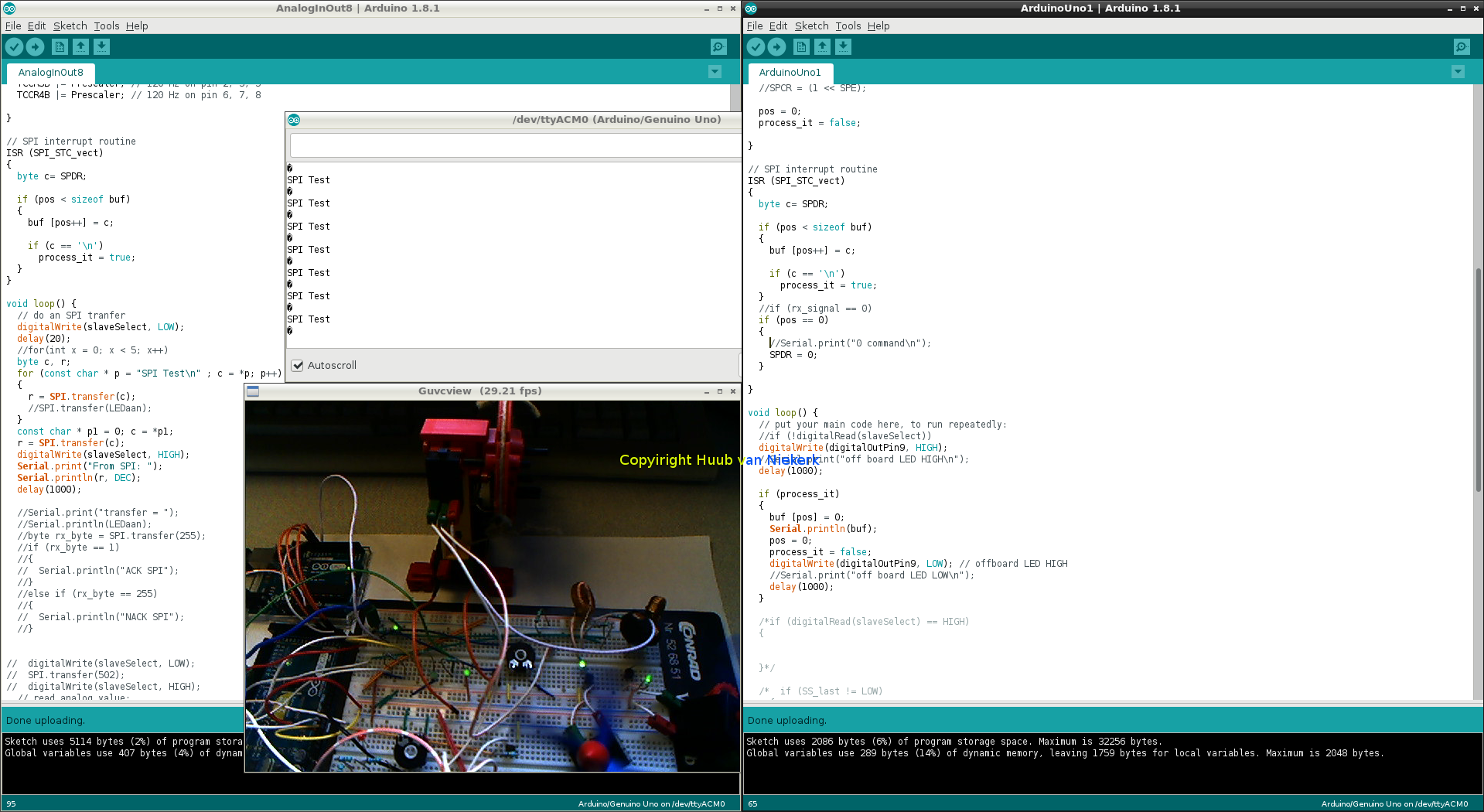
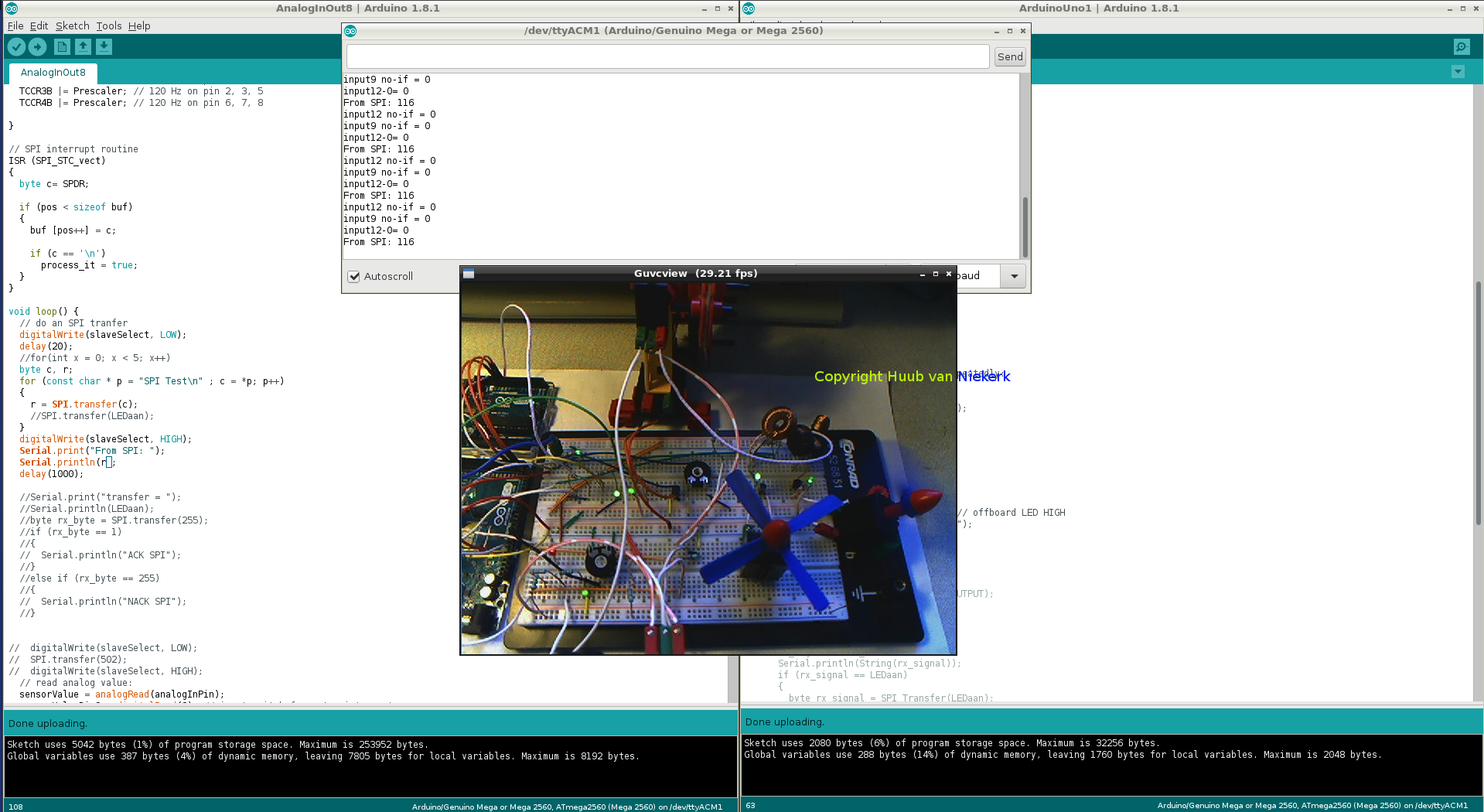
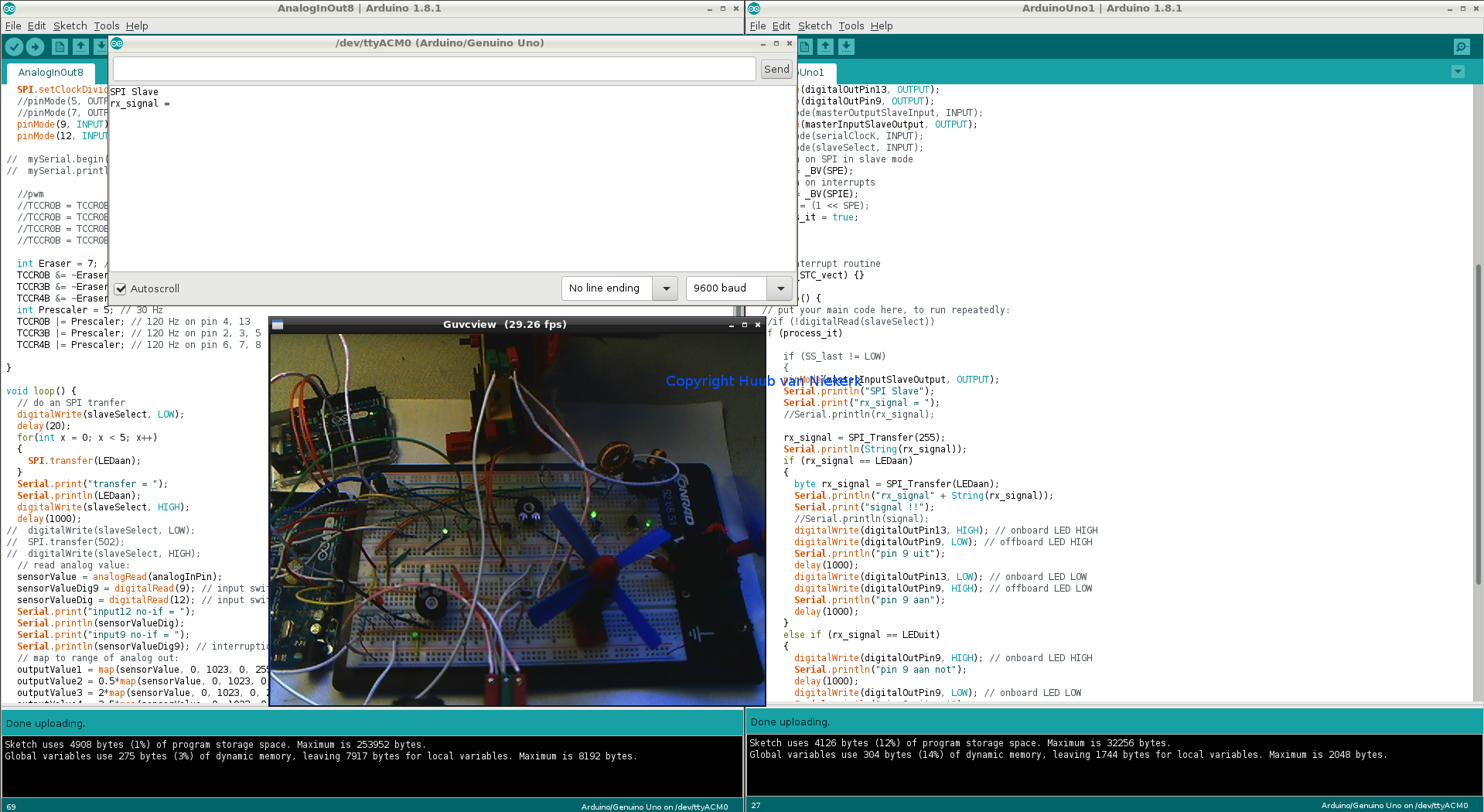
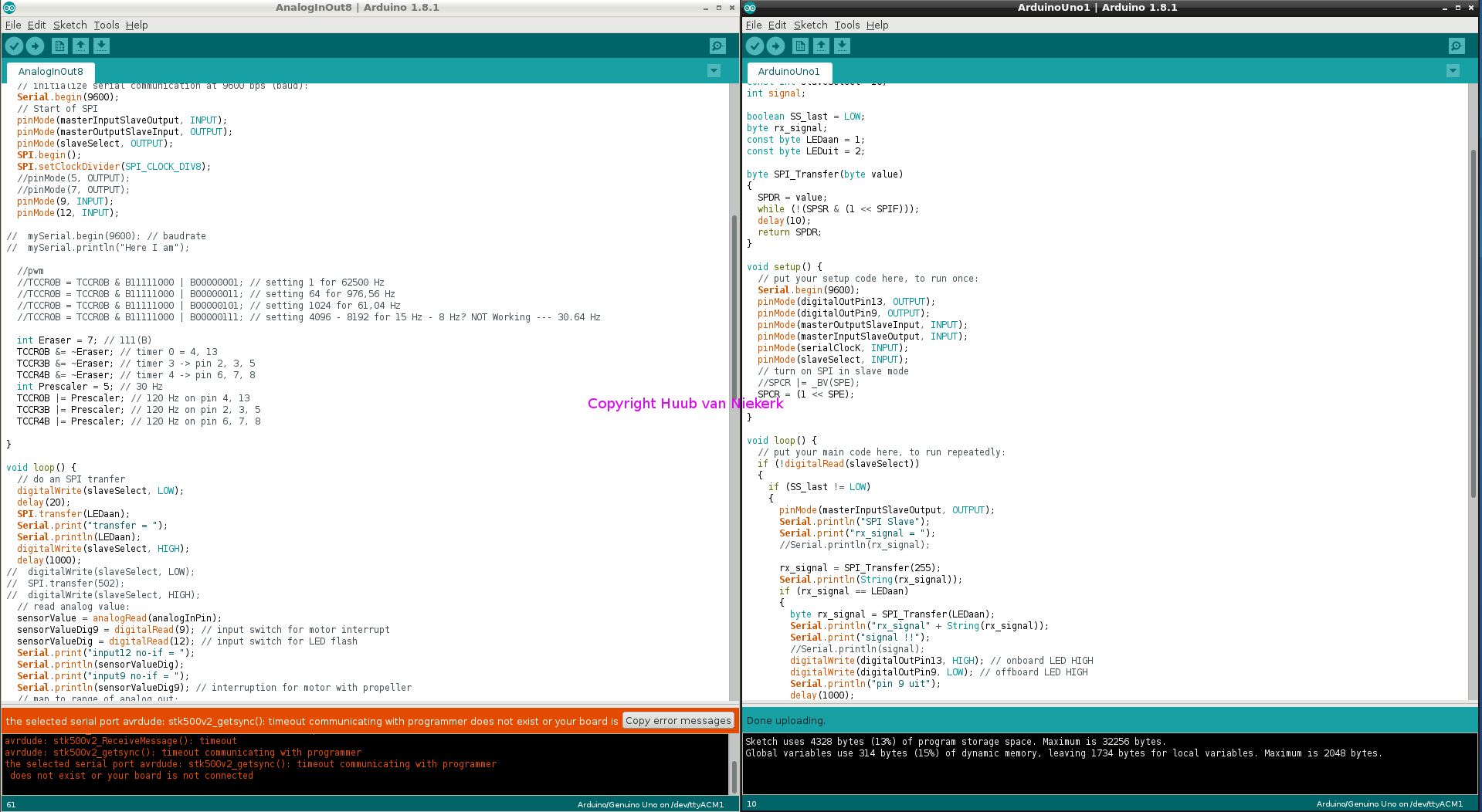
Arduino Mega2560: Focus on the motor connected to the Uno: why doesn't it work? With rewiring, reviewing documentation, re-code...will it work? Ending with a bit SPI. Click the image to watch the video.
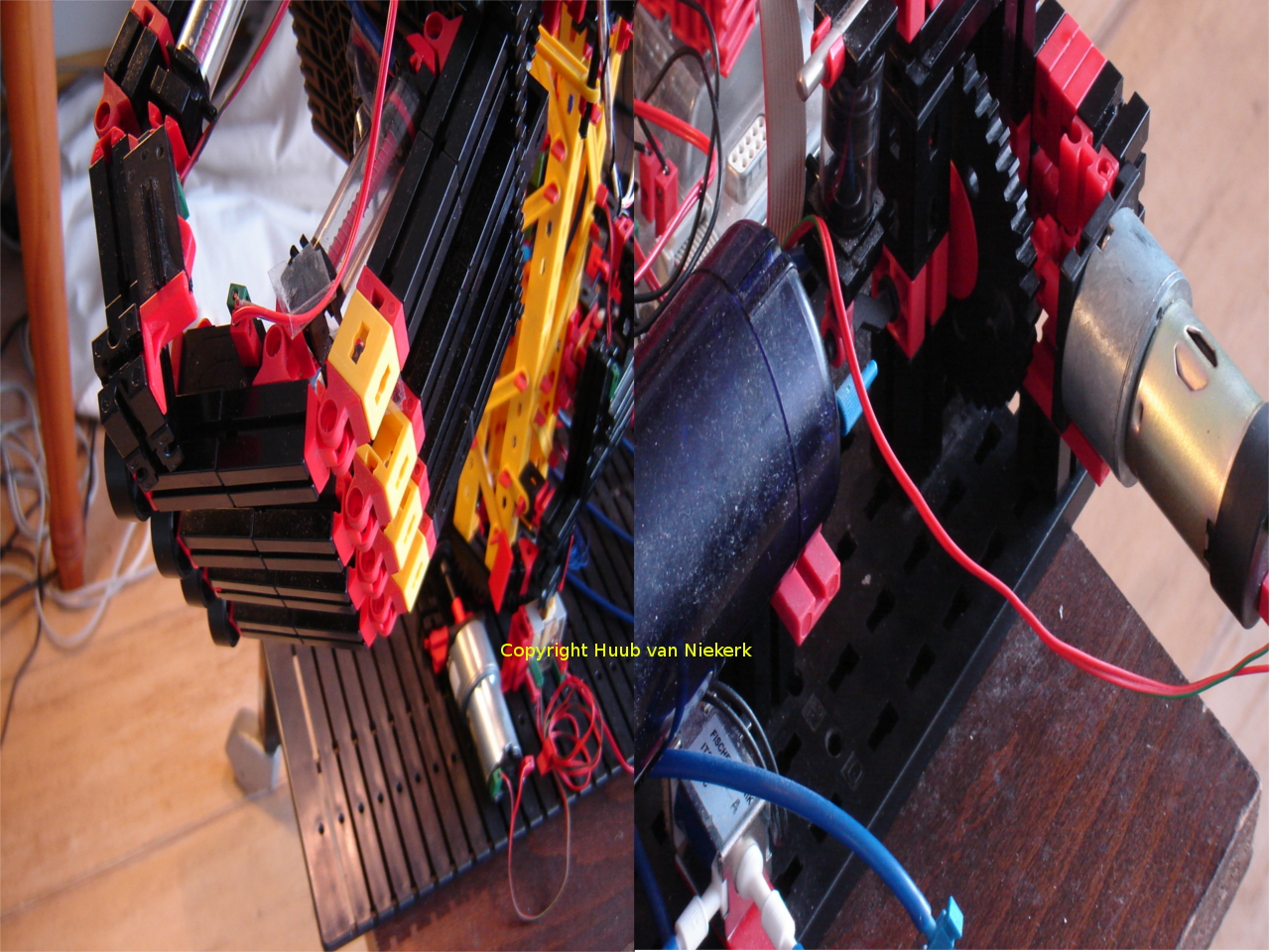
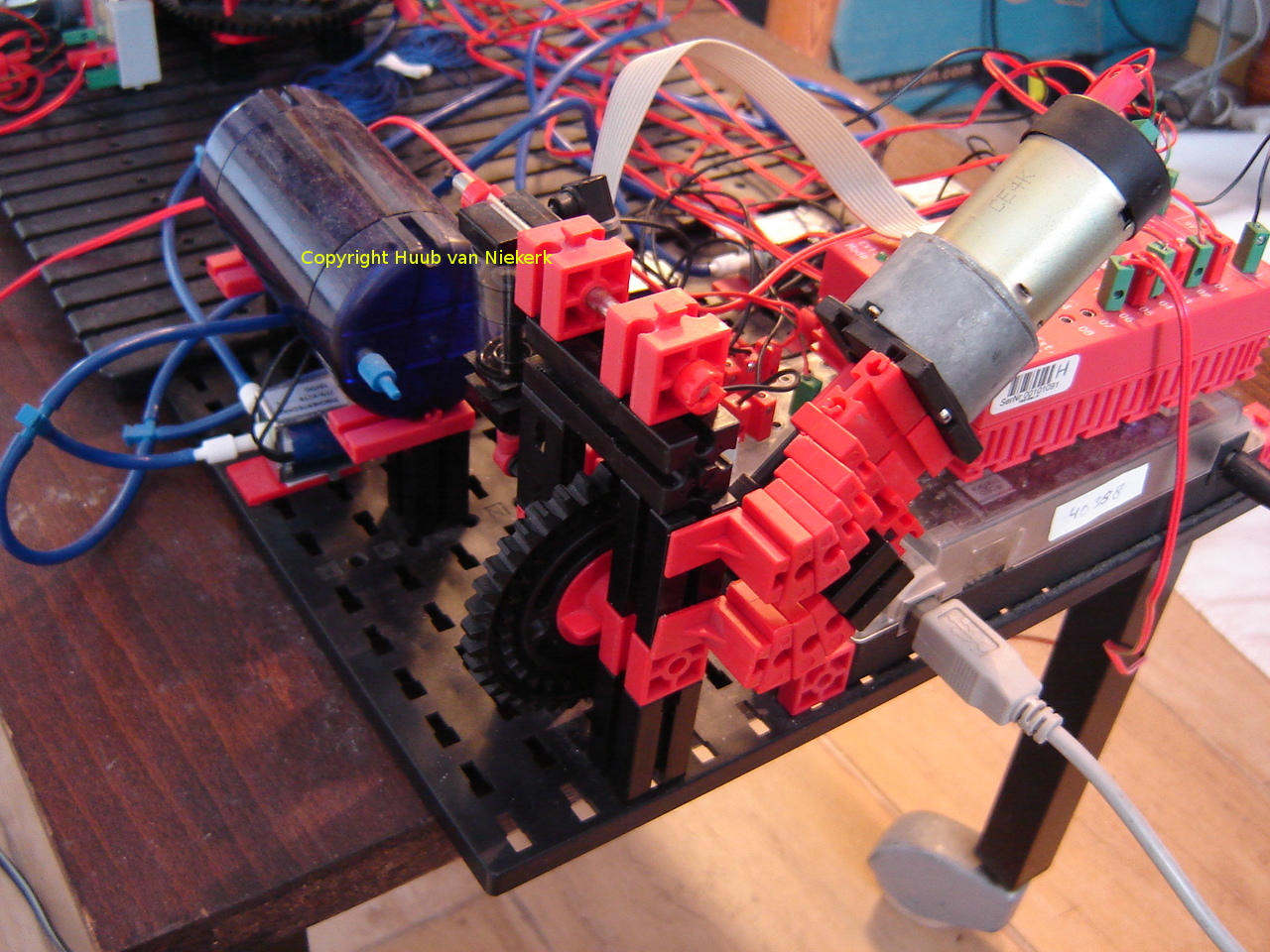
Hand: Continuing with motor yaw: I have to test the 3way contact-switch on the pivot, wire the yaw motor to the interface extension and see at the winch. Will the motor work? How much delay? Click the image to watch the video.
Mirft2: Going further with OpenCV and the sensors: why does ROBPRo show that Python doesn't? Then a camera oops with low battery?Changing the algorithm to let the motors stop, sound goes off. Is this right? Click the image to watch the video.
Mydfir: Continuing with linesensors first, after some adjustments, I come to a surprising insight which may affect the code. Then with sonar: is it working nice? Some test to find out, again. Click the image to watch the video.
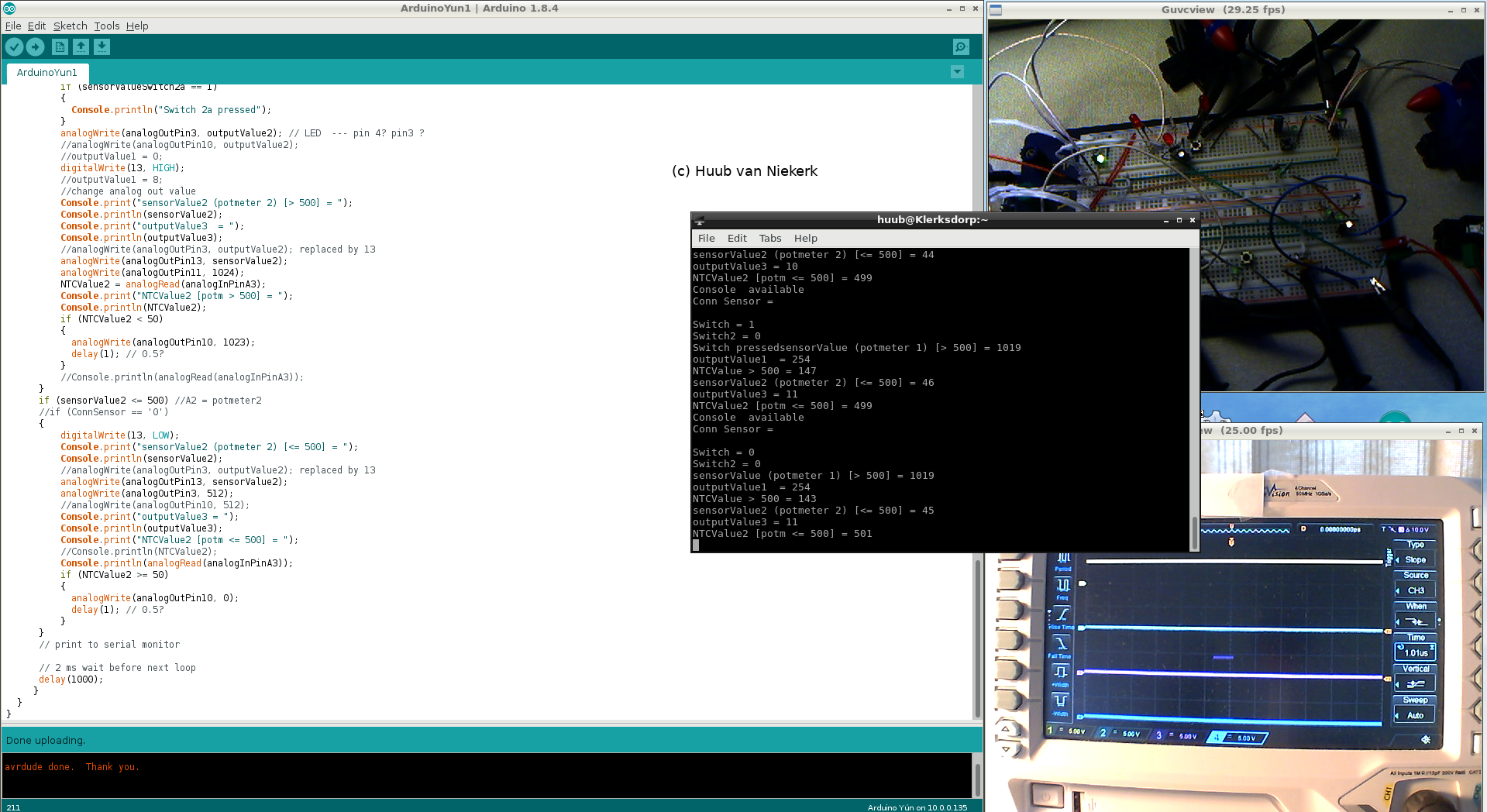
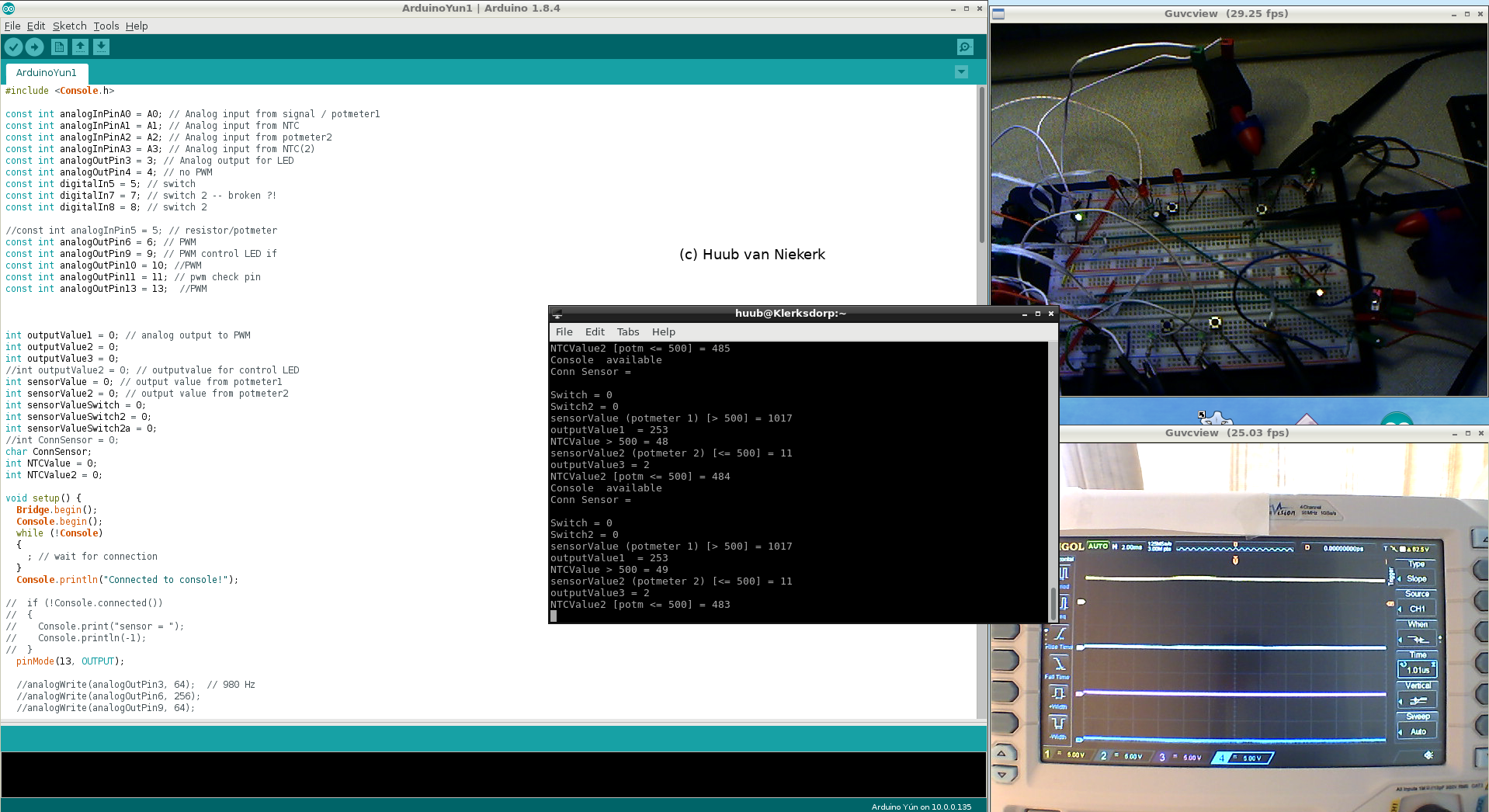
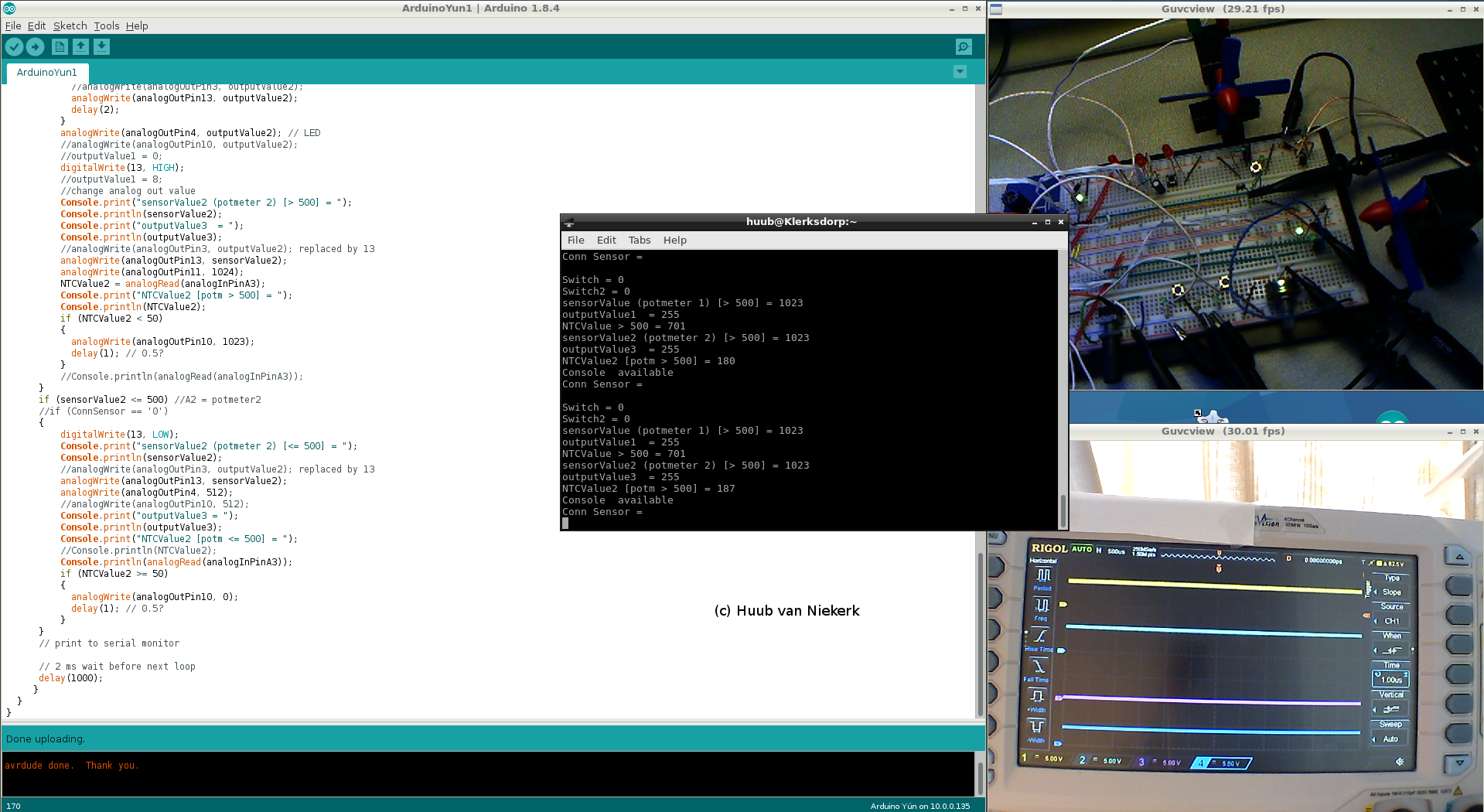
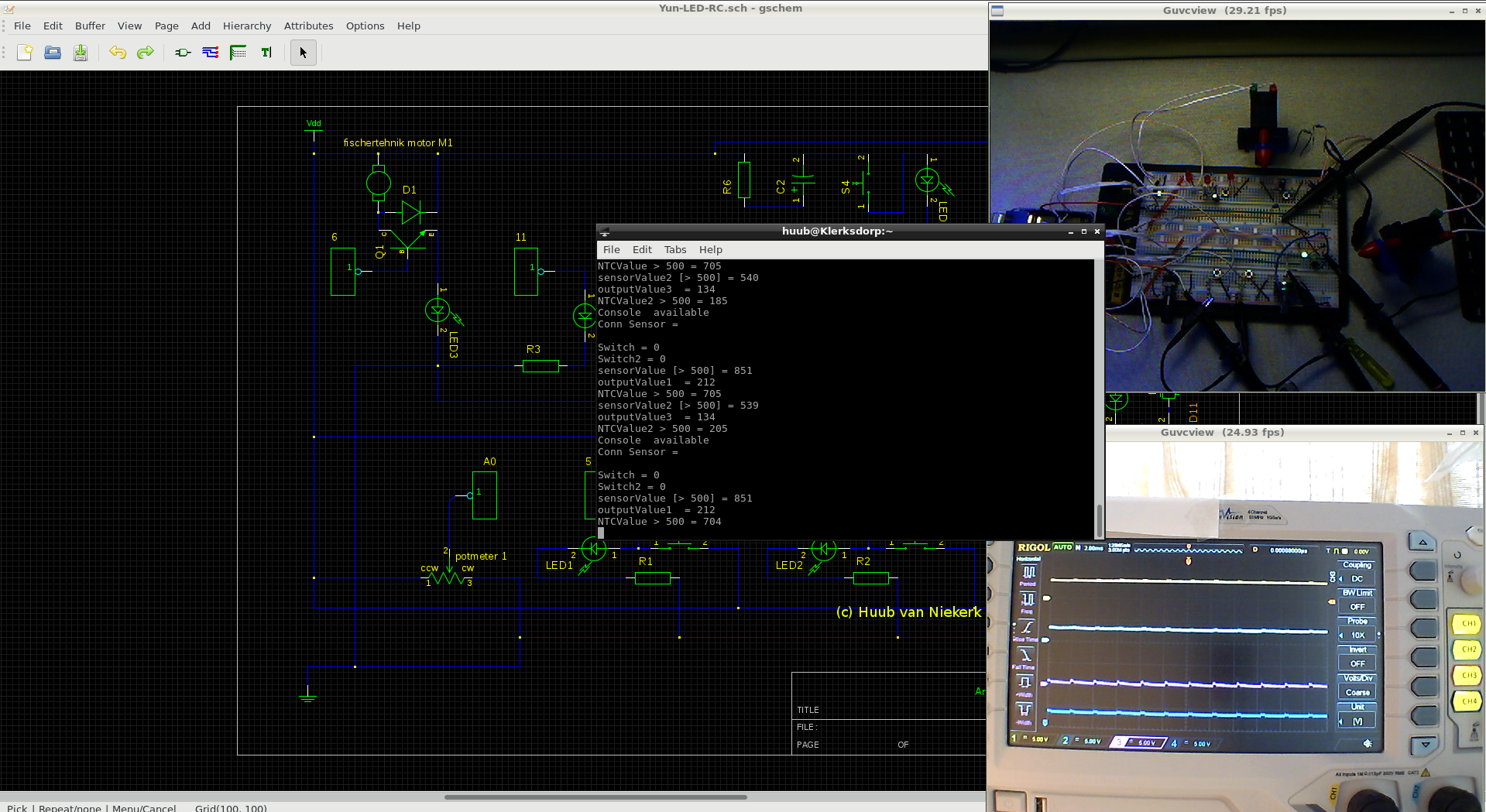
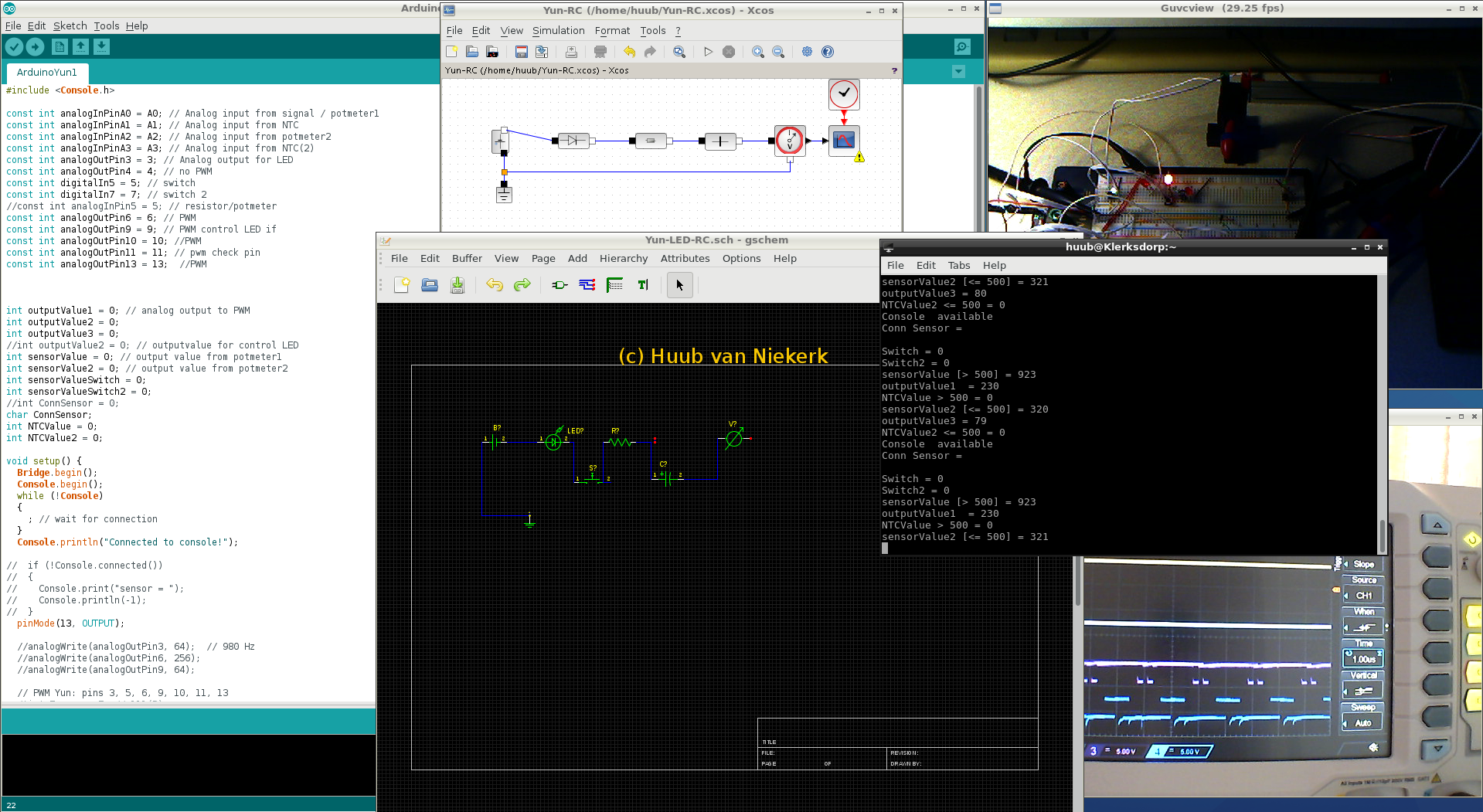
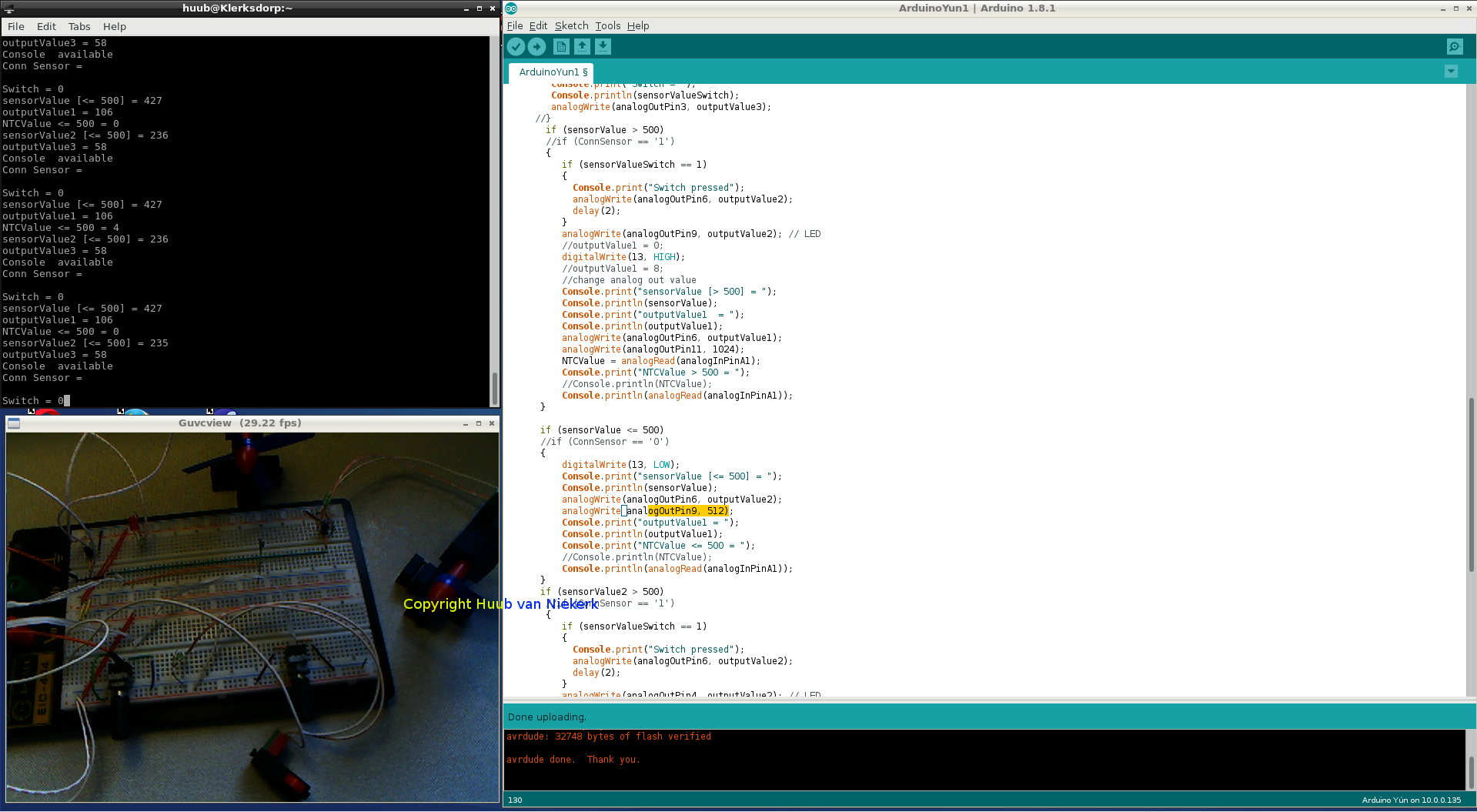
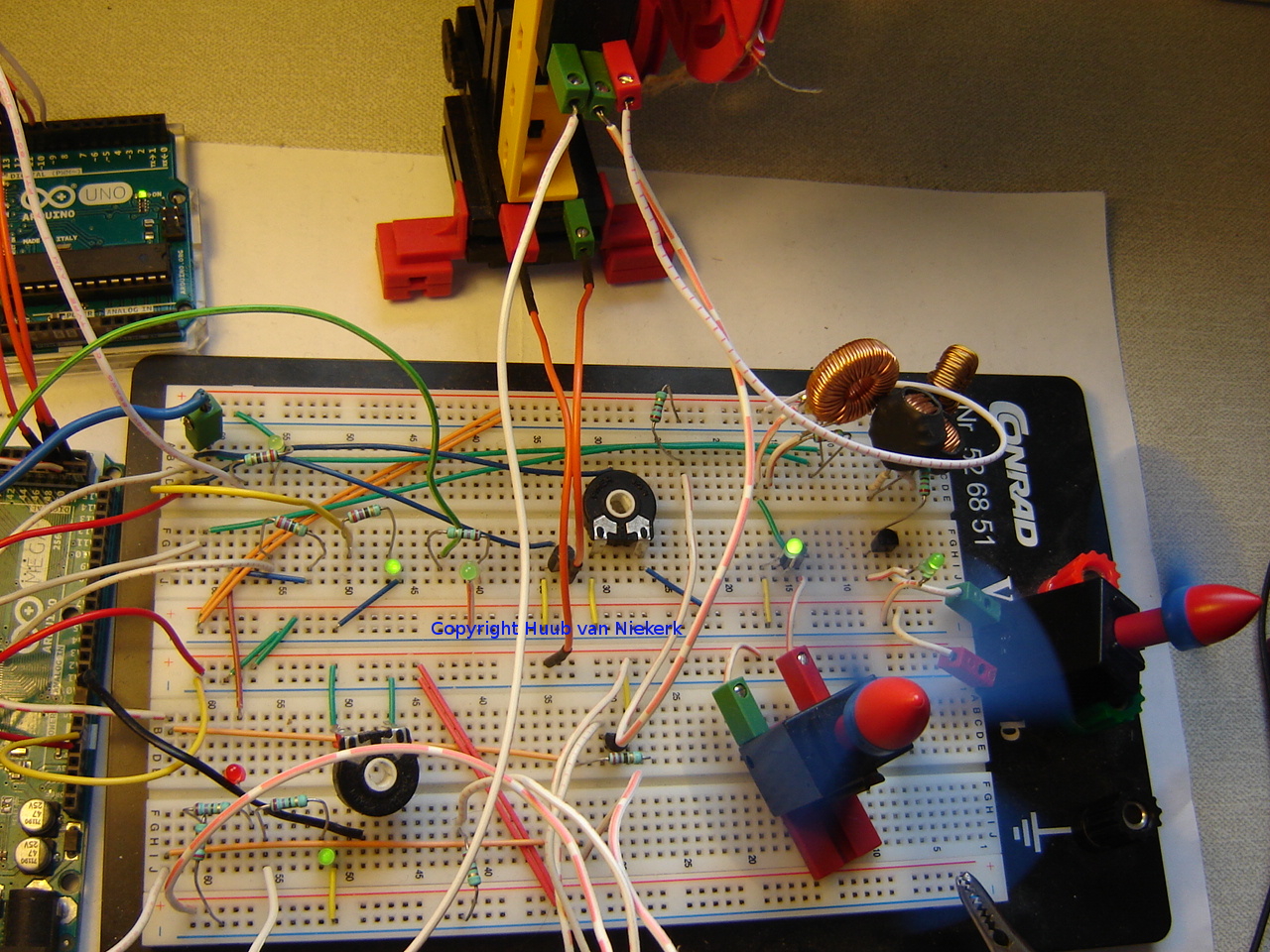
Arduino Yún: So why is potmeter1 influencing motor2? And why is the working of potmeter1 reversed since the rewiring from the transistor? Will debugging give a clue? Will the oscilloscope give a clue? Click the image to watch the video.
Discovery: Using OpenCV, how is it influenced by the sensors? How are the signals? What's the response? What part of the algorithm is used? Some observations lead to code changes, but will this help? Click the image to watch the video.
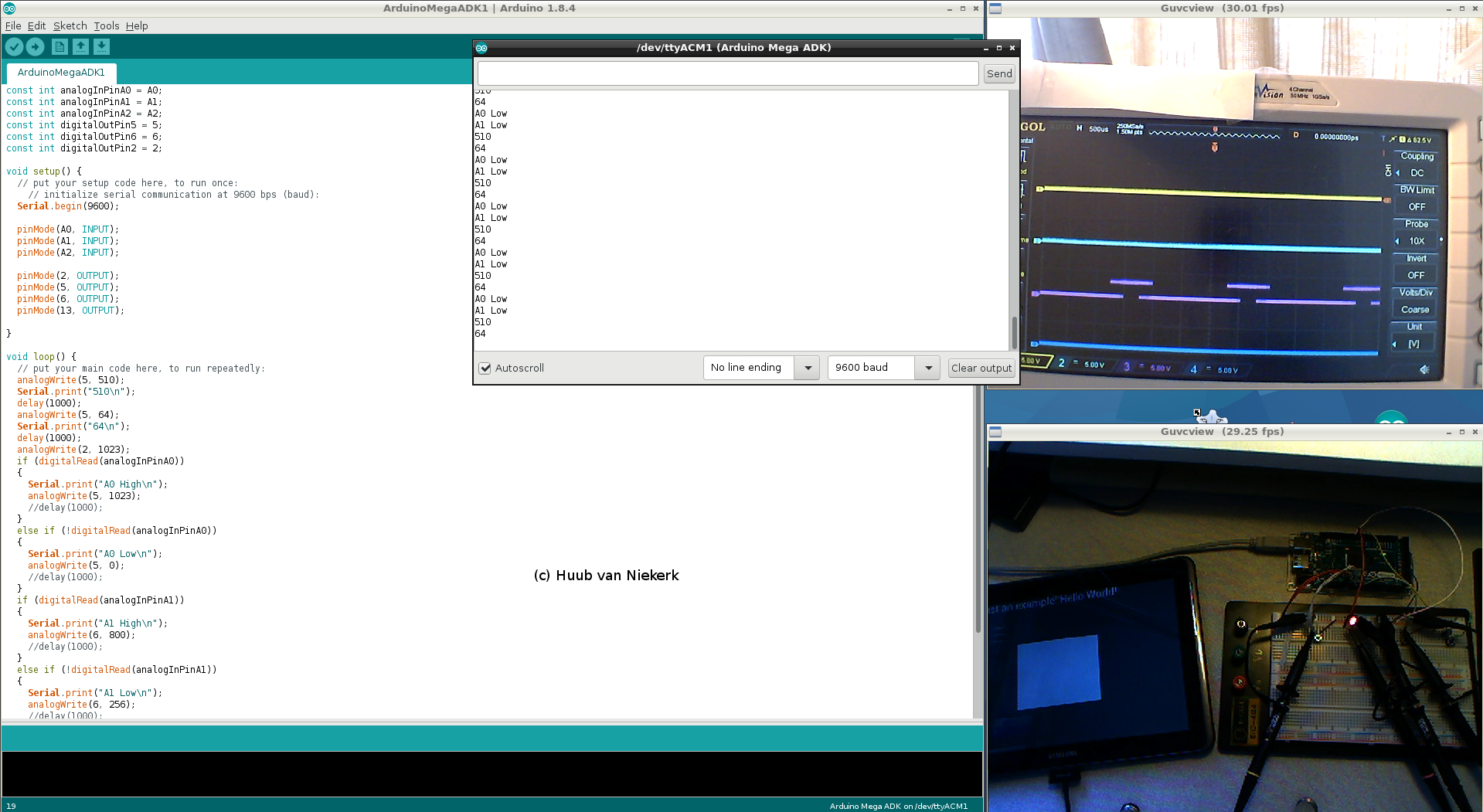
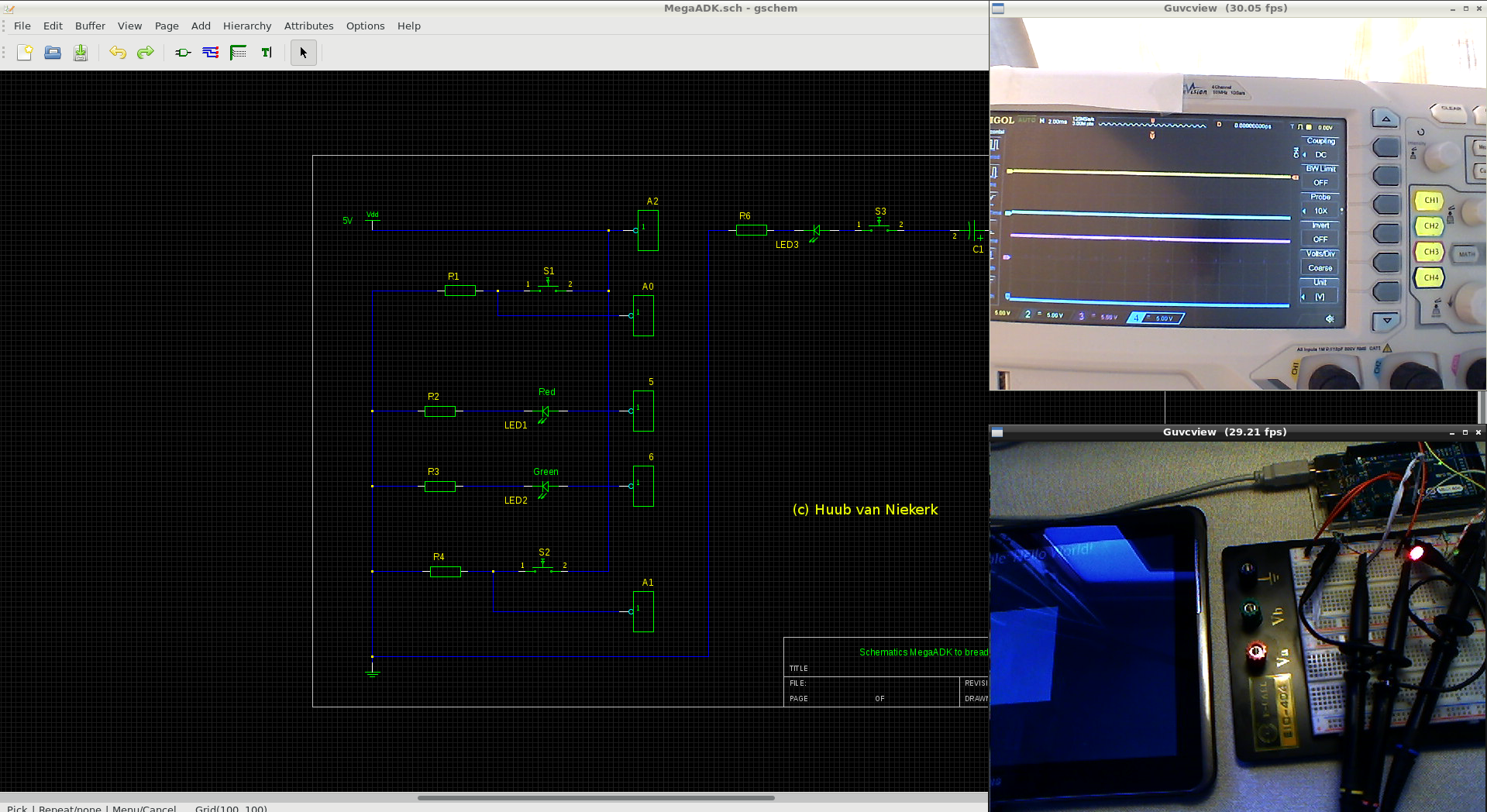
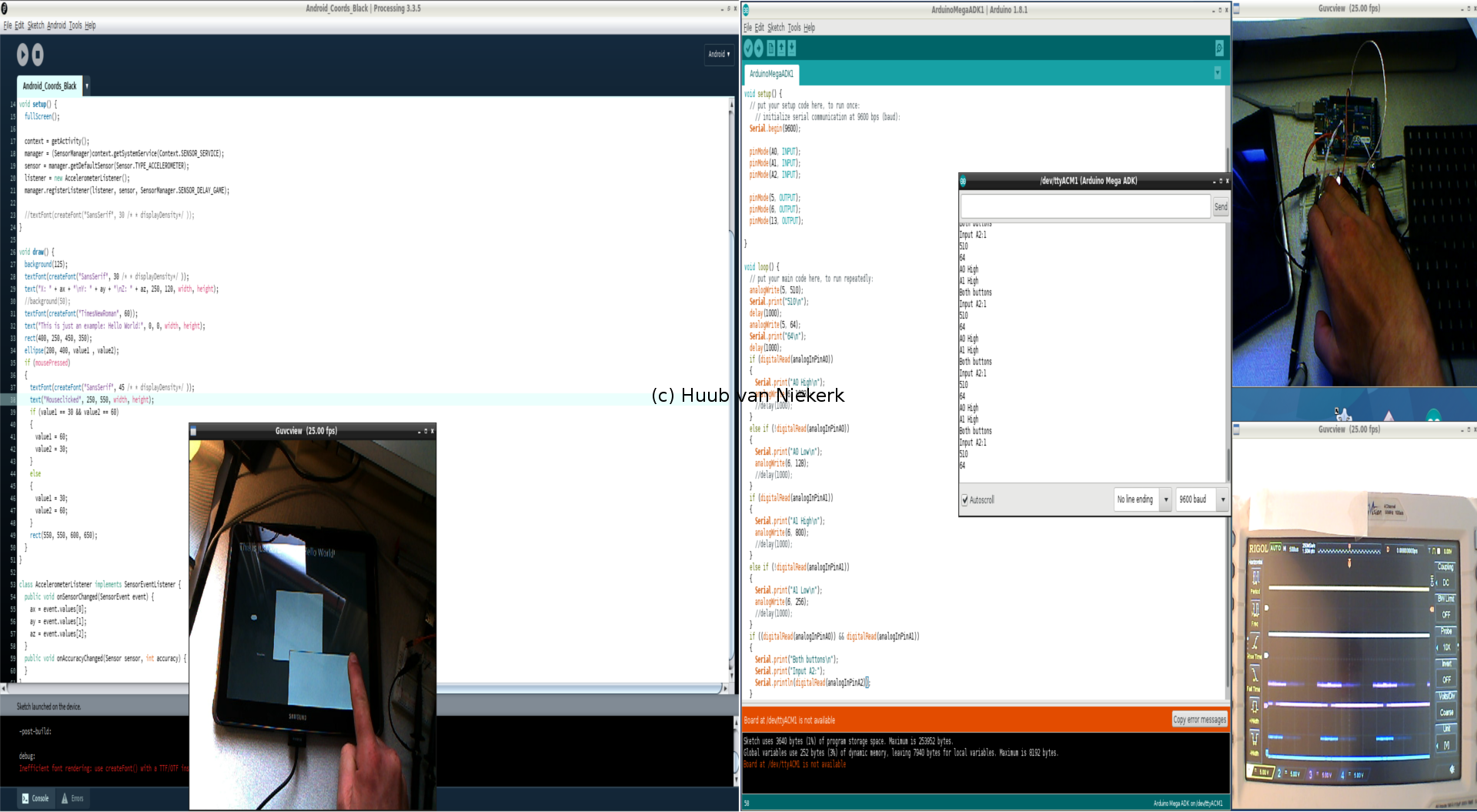
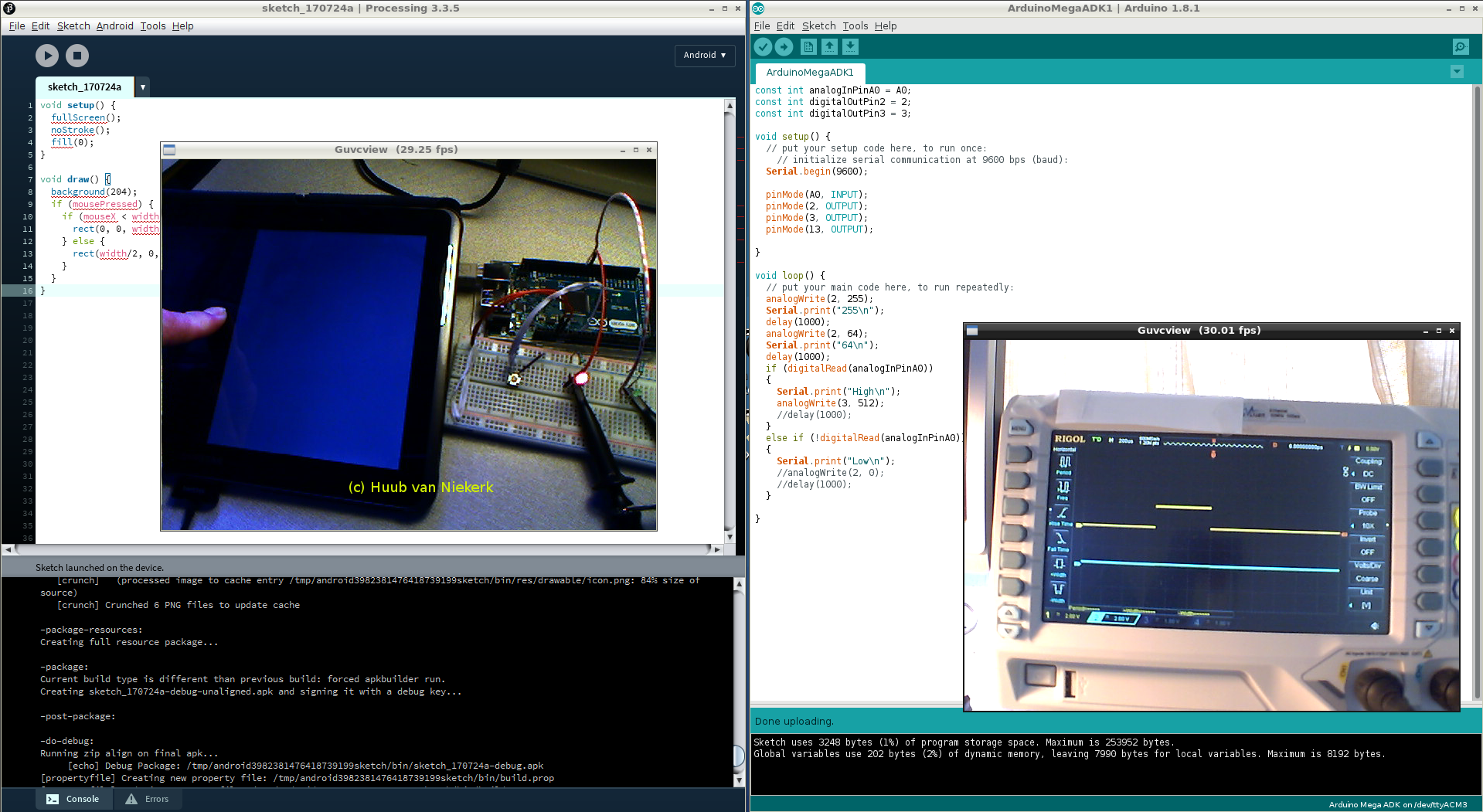
Arduino MegaADK & Android: Testing time again on the Android: counting seconds. Changing the number in the for-loop and adding an instruction as well as some reasoning brings an interesting conclusion. Then the Arduino: can the flashlight be replaced? How does that work? Click the image to watch the video.
RaspberryPi2 & ROS: Trying to solve the ImportError for the other 3 messages, I search various ways. What's wrong and why? Finally, I add another part to the circuit with an unexpected result. Click the image to watch the video.
BeagleBoard & monorail: Focus is to examine the location of friction. However, some oddities show up, so I have to find out. This ends in another reconstruction and wiring solving. Click the image to watch the video.
15 December
Arduino Mega2560: skippen transistor propeller + 2 chains, replace wire motor Uno, changing code for monitor 2560 output, SPI. Click the image to watch the video.
Hand: To separate the yaw motor from the pivot motor and have it stop for 2 seconds, I have to detect and add a wire, but how? Is the solution good enough? This results in a diagnose, reconstruction and reprogramming. But will it work? Click the image to watch the video.
Mirft2: Combining OpenCV and the frontsensors requires it to work fine. So what's wrong with the sensors. if anyting? Will ROBOPro shed a light? Battery oops doesn't make life easier, but it gives an unintended picture. And ssh becomes annoying. What to do? Click the image to watch the video.
Mydfir: Starting with line-following, extensive checks reveal a cause I didn't think of but which is quickly fixed. Does it work then? Next is sonar: what's wrong with that? Wiring? Some checks give a clue, but not conclusive. Click the image to watch the video.
Arduino Yún: Again, the NTC. What works or not? What should eb expected anyway? Then, testing the whole circuit..does everything else work? Finally, rewiring test of the motors with a surprise end. Click the image to watch the video.
Discovery: Once again: vision, but because of some problems with the sensors, the probes are now on touch sensors and sonar. What do they reveal? Some code changes are necessary. What's wrong? Why? Click the image to watch the video.
Arduino MegaADK & Android: First focus: time on the Android (again). Why is the elapsed time in milliseconds 0? The for-loop: change in code and another test. Now there's a result. Then: Arduino where things seem to run fine, except for 1 signal. Further search and test brings a big oops to light. Click the image to watch the video.
RaspberryPi2 & ROS: With the focus on messaging: what's going wrong where? Setting a new roadpath to work to, I try to create a new message only to end up debugging. How will this end? Click the image to watch the video.
BeagleBoard & monorail: Focus again on the carriage but questioning the wheels alignment. After fixing this, how is the balance? Then the speed srops again, but why? Obstruction? Click the image to watch the video.
8 December
Arduino Mega2560: Following a test result from the MegaADK. I change the wiring of a motor to exclude the transistor. Will this work? Will the motor at the Uno side work? Back to SPI: will adding another character series work as well? Click the first image to watch the video.
Hand: Replacing the hooks by guides with holes, it comes to extended testing. Which brings several issues to surface, but can those be solved? Robustness, friction, length, wiring, software, location, to name a few.. Click the image to watch the video.

Mirft2: Going on with OpenCV using the ft-GUI so motors run, image is being taken if it wasn't for some typos. Then: are the sensors wired fine? Time for ROBOPro and the oscilloscope to check. Click the image (published on Instagram) to watch the video.
Mydfir: Focus is first on the line-sensors: still not ok. Then the sonar: why the odd reading? Would rewiring help? Or change connections? Data shows oddities...what's up? Click the image to watch the video.
Arduino Yún: Focus on the LED and NTC: why doesn't it work? Rewiring the LED to transistor input changes something, but doesn't solve the problem. Then a redesign seems to make things better, but what about the NTC? The voltage seems the same? Click the image to watch the video.
Discovery: Testing the robot, I notice lack of a signal on the oscilloscope. Checking the probe, it shows that there's a very good insulator. Then back to OpenCV. And why don't sonar, sensors work? Click the image to watch the video.
Arduino MegaADK & Android: So what about the time on the Android? Should it be seconds or milliseconds? Changing the code gives another mystery. Then Arduino: does it still work? Can I add something to it? This brings a little surprise. Click the video to watch the video.
RPi2 & ROS: Checking the circuit, the focus is first on the other message files. Why don't they work? Then focus is on the LED on pin 22: it's timing is off. Why? Some code change brings solution. Click the image to watch the video.
BeagleBoard & monorail: Going on with the carriage for speed: what happens and when? VNC is nice, but it's over the network...oops. Click the image to watch the video.
1 December
Arduino Mega2560: Starting with an overview, I dive into SPI communication again with another attempt or some. After that I shift focus to electronics and mechatronics. Click the image to watch the video.
Hand: Continuing with the yaw motor, several hurdles have to be taken: wire extension, guiding, motor direction, attachment locations. Like all previous changes, things don't go easy. Click the image to watch the video.
Mirft2: First focus: correctly program the front sensors to respond to I2 & I3. Then: grabbing an imaging. Using a hint from the community, I put the controller on the ft-GUI to see what happens to either the camera and motor. Click the image to watch the video.
Mydfir: Testing the line sensors and programming them reveals an unexpected hardware issue. While the new discovery makes sense, will another reprogramming solve it this time? How about the sonar? Click the image to watch the video.
Arduino Yún: With one of the NTCs half working, I shift the focus to 2 LEDs. One gets its control straight from pin10, but does nothing. Why? The oscilloscope shows no signal. The documentation shows a massive clue, after which something has to be changed. Then it works, but does it fully? Click the image to watch the video.
Discovery: Using OpenCV to get imaging correct and find the colour red. This turns out to be a challenge and tests come with unexpected results. But why? And how to solve them? Click the image to watch the video.
Arduino MegaADK & Android: After an overview and test, it's time for debugging the freeze & time. So what happens and why? Change of text location reveals it works, and how many seconds go in a minute. Then: does the electronics all work? A look a gEDA... Click the image to watch the video.
RPi2 & ROS: Starting with an overview and simple test, I continue with fixing a data range for callback4. This turns out to be a matter of detail with another question: how is the output printed? Next, adding another LED: how should the wiring go? Click the image to watch the video.
BeagleBoard & monorail: More experimenting with balance, wheels, power and speed brings some unexpected issues, with a rather odd solution. Also: why does it hold still at some spots? Click the image to watch the video
24 November
Arduino Mega2560: At starting the experiment again, the SPI SS value is not what is should be. Also, SPI doesn't work?! A reset brings hope but what work? Also, a reshuffle on the probes seems needed. Then: where does the code go wrong? A check with ASCII and a HEX calculation. Click the image to watch the video.
Hand: Now it's the occasion to "grant a wish" from conventions: change the service to the hand. In robotics there's roll, pitch and yaw in Degrees of Freedom. I'm going to try to bring yaw to the hand. But how? Click the image to watch the video.
Mirft2: The only firmware update is noted unstable so I don't go there. However, v.0.9.3 should be working according to others. Trying again, will using bytearray(pic) work? And ftrobopytools? Then some other strange things appears as well. Click the image to watch the video.
Mydfir: More tests on the floor with line-following and sonar: the sonar responds, but why like this? Some errors in thinking and more questions. Also: what does the data reveal? Click the image to watch the video.
Arduino Yún: Again the NTC thermistor: how will it work with the lamp? Some rewiring seems needed. Do I need a battery? A power-controller? Is there any measurable result in either the monitor or on the oscilloscope? Then: another LED doesn't work? Why? Some code flaw? Click the image to watch the video.
Discovery: New attempt to use OpenCV and making gray images. What goes wrong? What goes right? Finally some very nice results but also an oops. Then a floortest or test on the floor... what happens ?! Click the image to watch the video.
Arduino MegaADK & Android: Again, when is the timing in seconds correct? Adding another timing reveals a new issue but how come? Then: checking the circuit and finding out that an LED is used twice. So it's time to rewire and add code. Click the image to watch the video.
RPi2 & ROS: Trying the electronics brings odd stuff. Where does it go wrong? Then trying callback3 by using callback2 but will this work? Does the data work? Does a string work? "rostopic echo" will show...How about a callback4? Click the image to watch the video.
BeagleBoad & monorail: Trying to balance the carriage so it gives drag and won't derail. What angle is needed? Should there be something else as well? Will both diagnose and Python run? Click the image to watch the video.
17 November
Arduino Mega2560: The SPI communication with the Uno still isn't good: 1 number in return, and not the good one. Some experiments show where the culprit is, but what is it? Click the image to watch the video.
Hand: Having to fix the upper sensor touching of the vertical gears, I replace the carton by a clamp. But does it solve everything? The wiring seems to have an issue as well so I should reroute it. Using Python and diagnose to test, are things as should or not? Click the image to watch the video.
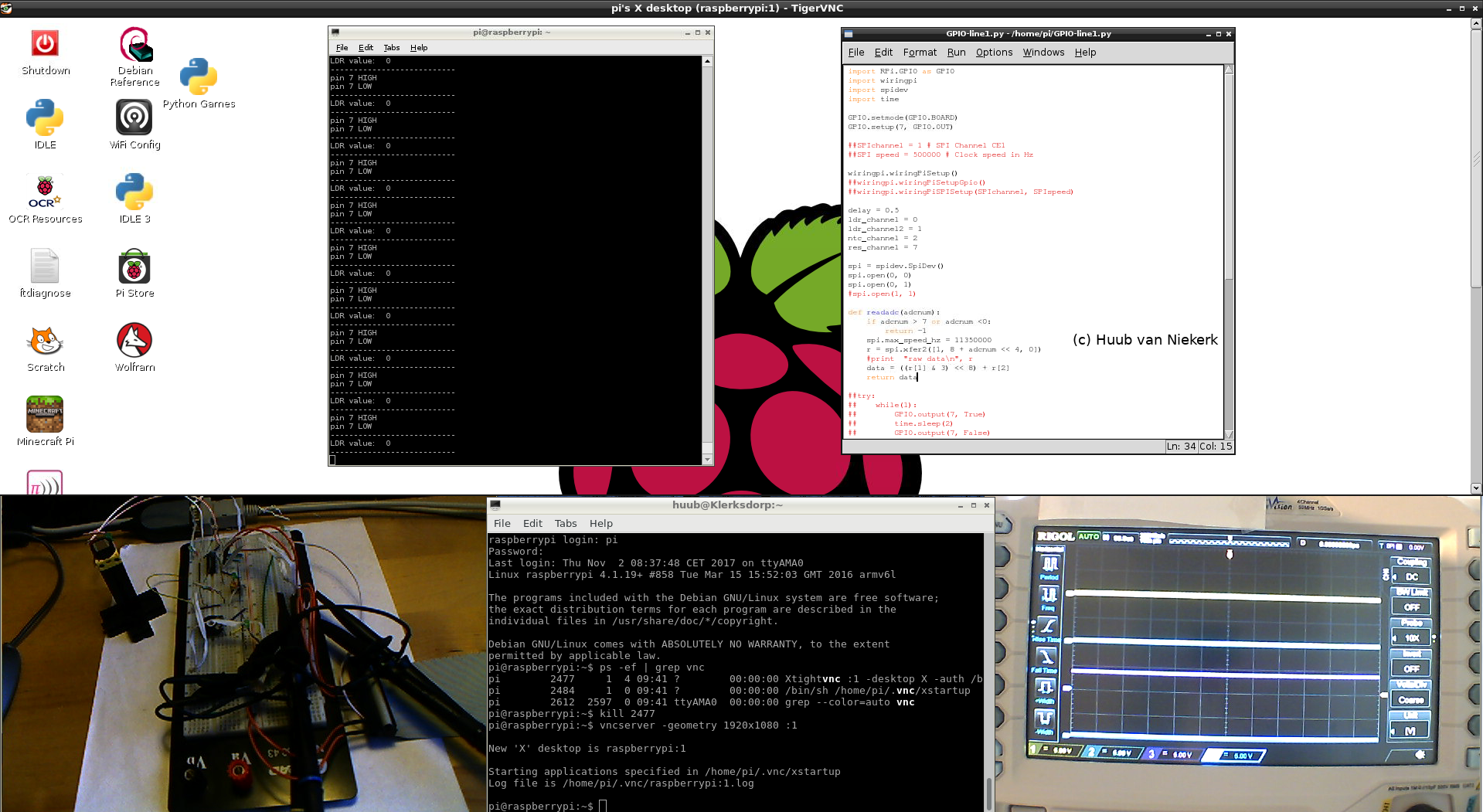
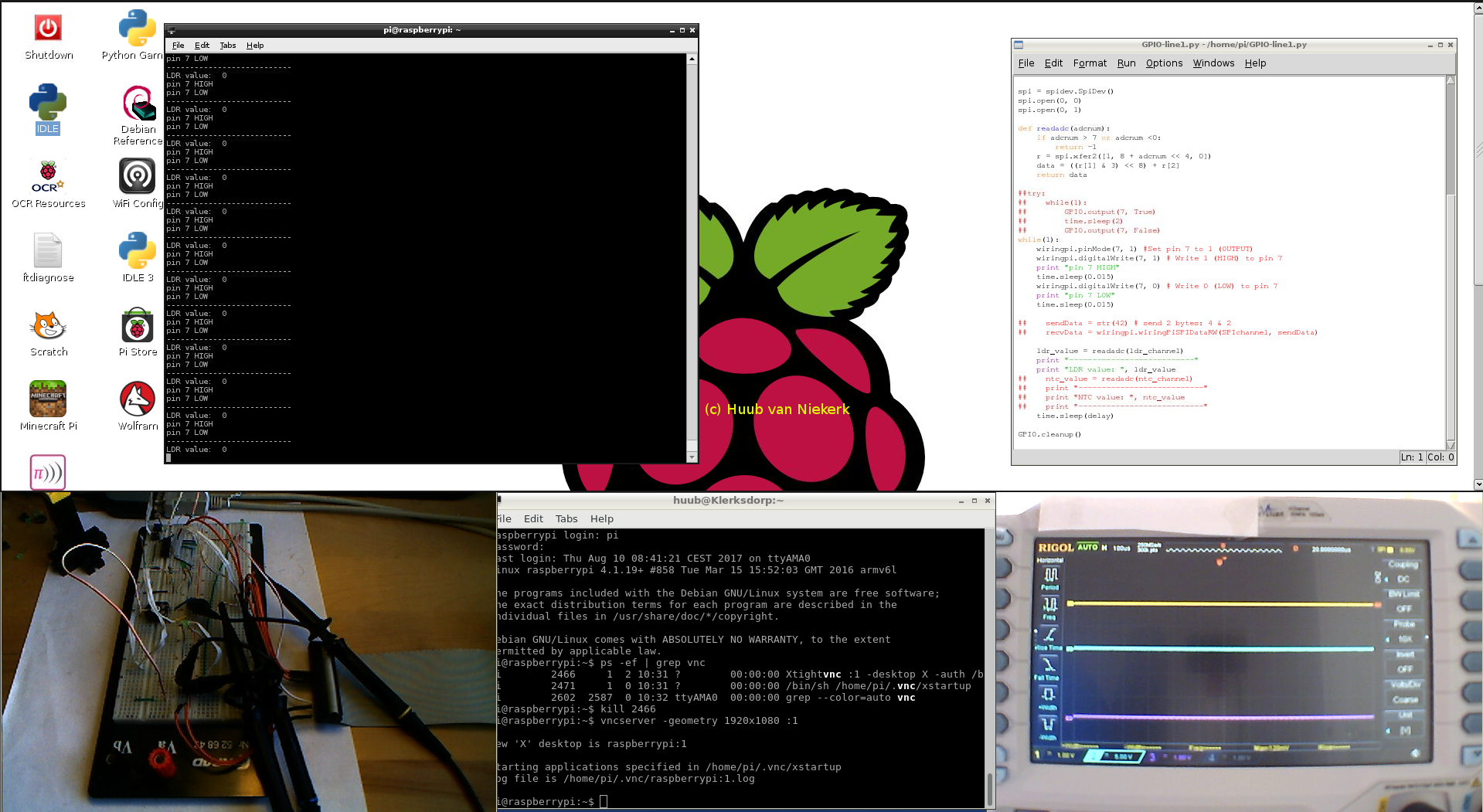
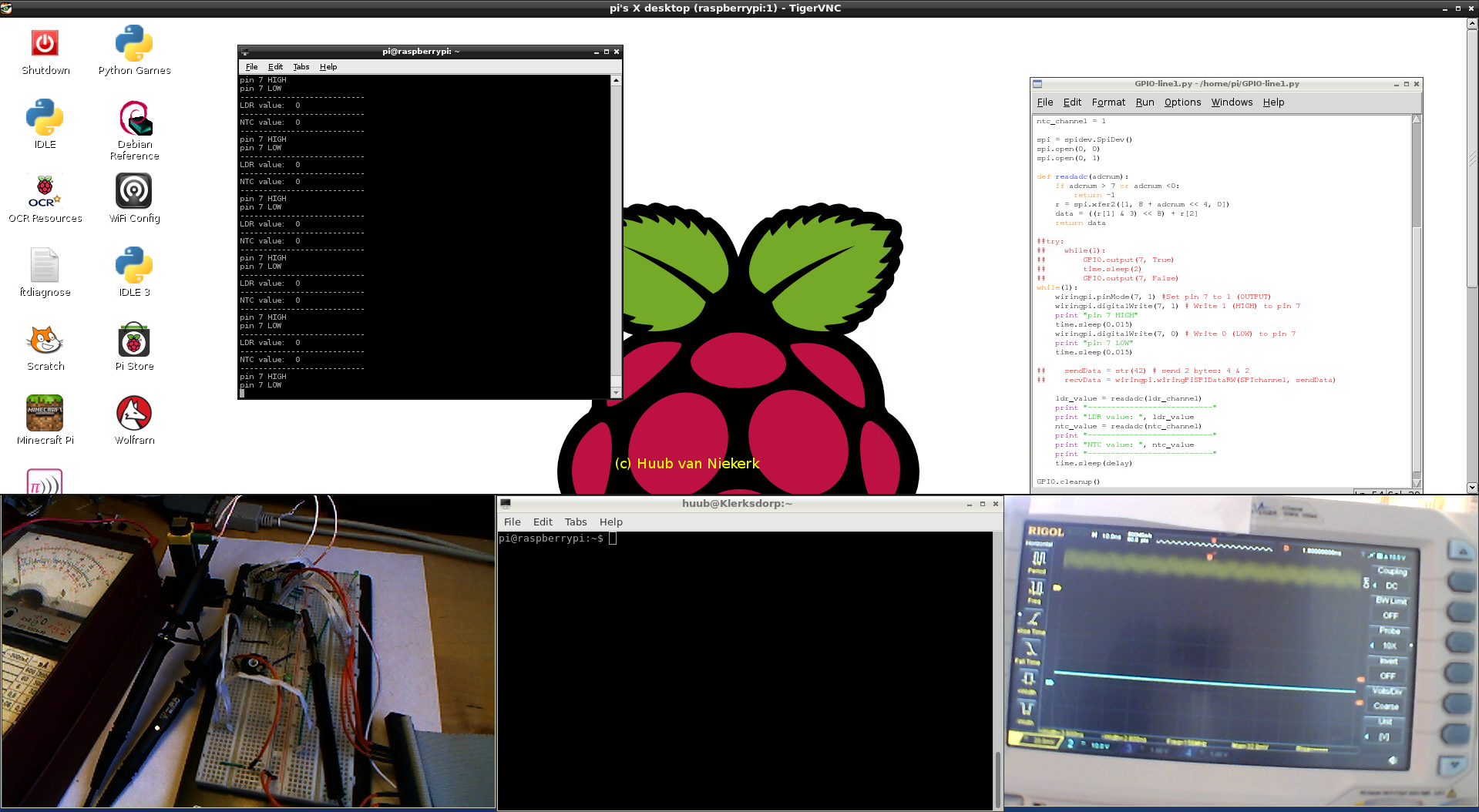
RPi: Testing the ADC again, using a multimeter on the LDRs, and a GPIO test with result that changes some thinking and gives an oops. After changing a component, another question rises. Click the image to watch the video.
Mirft2: First using the community firmware, how does the camera work after changing "",join(pic) into bytearray(pic)? Then a quick camera change, how does it work out? Then switching firmware: how does it work? Does ftrobopytools work? Test on the floor: what does an image look like? Click the image to watch the video.
Mydfir: Since the problem seems to be with the sonar, the focus is there. But when testing, it can't be just the sonar. Then some code checking reveals a mistake, but will it solve everything? Click the image to watch the video.
Arduino Yún: With the focus on the 2nd NTC, the question is if a lamp will do the job. This forces a check and change of code and a little rewiring. Then: what is the voltage needed to make a lamp burn? How to continue? Click the image to watch the video.
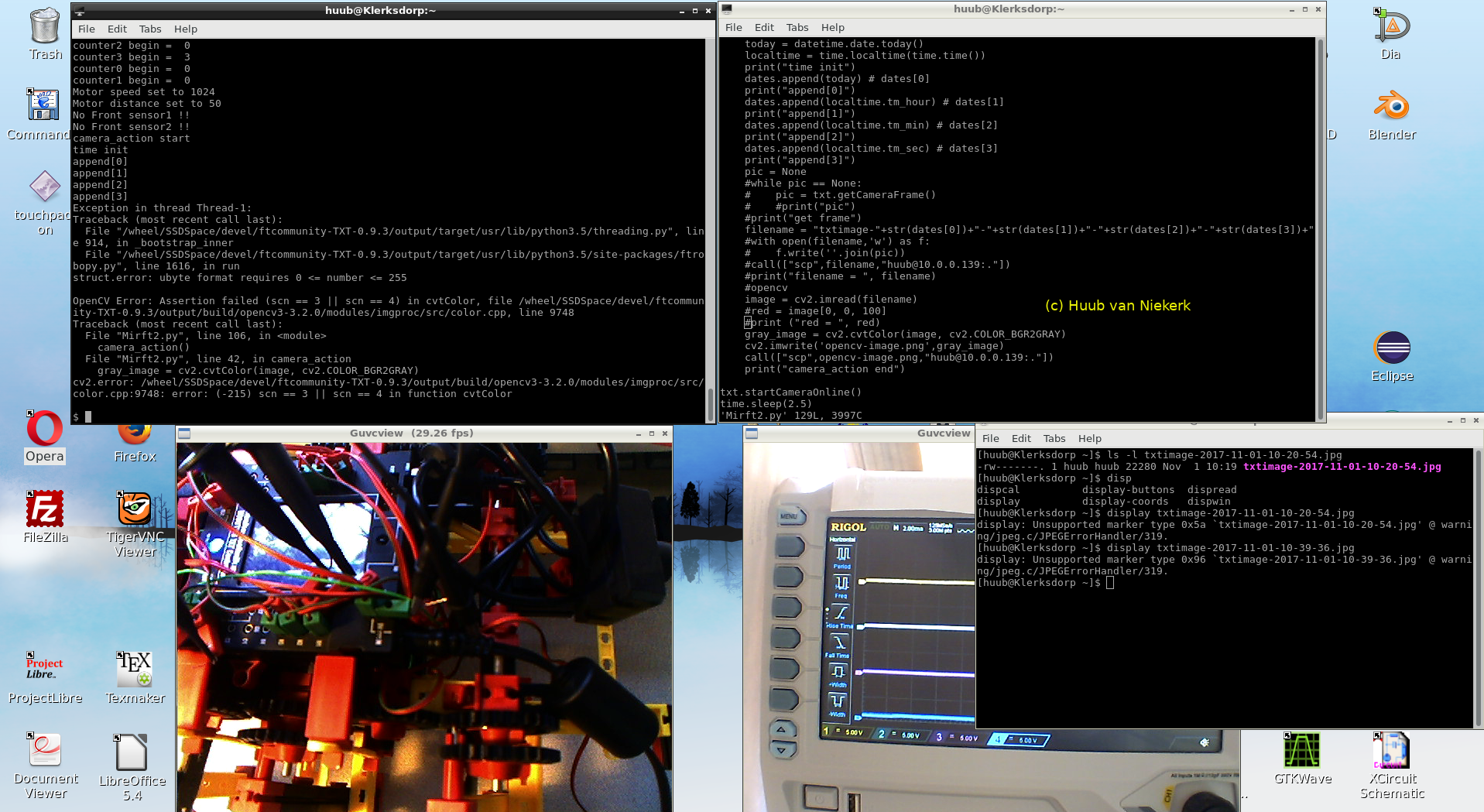
Discovery: Going on with OpenCV on the community firmware, I manage to solve the join(pic) - error...which turns out to be about something different than I assumed. Then there's something with the gray image which in the end has an unexpected cause. But how come? And how to solve it? Click the image to watch the video.
Arduino MegaADK & Android: While the background colour on the Android has changed, why does the timing keep acting up? 1 second isn't 11...Then for Arduino: a circuit test to see if anything works nicely and a small change in the gEDA/gschem drawing. Then I find why an LED works odd and change a bit of code. Click the image to watch the video.
RPi2 & ROS: Trying to fix callback3, I find the reason why callback1 doesn't work anymore...which is a simple reason. Does that bring callback3 to life? It needs a published but where should that be? Click the image to watch the video.
BeagleBoard & monorail: testing in angles with ground from probe and ground from the RoboInterface. What works? A reconstruction seems logical, but how? Will it be stable? What should the angle be? Some oopses. Click the image to watch the video.
10 November
Arduino Mega2560: Continuing with SPI: how to set the probes and timebase of the oscilloscope? How to deal with the code? Adding some output to the monitor gives unexpected insight, change in thought and algorithm. Does it work (better) now? Click the image to watch the video.
Hand: Trying FtUploader again for BASIC, but will it work? Then, the wrist motor needs a modification and what about the arm? Finally, the vertical gearbox. What's wrong with it? What's a solution? Click the image to watch the video.
RPi: Testing the ADC by probing the signals: is it what should be expected? Where are the signals coming from exactly? Comparing with spikes with the code gives some insight, but further reasoning brings a temporary conclusion. Click the image to watch the video.
Mirft2: First, a walking test on the table using the community firmware, expecting nothing because of the earlier results. Then using the default firmware on the floor. What will happen? Next: cam tests. What works and what doesn't? A very surprising result leading to use the Android app. Click the image to watch the video.
Mydfir: First, I replace an LED and change the gEDA drawing. Then, continuing with the line sensors, I find that I have to correct some code as well as add some. After reviewing the output, I find an odd sensor reading that changes the focus of the problems. Click the image to watch the video.
Arduino Yún: Focus on the 2nd RC circuit with power from the LED / output 3. Why doesn't if behave like before? This leads to an investigation of the code and some interesting conclusions. Will it work again? Click the image to watch the video.
Discovery: Another attempt to use OpenCV on the community firmware leads to an error and serious debugging with rewriting of code and some unexpected results. But will it work? Click the image to watch the video.
MegaADK & Android: Continuing with timing and the length of a for-loop, I find dd results. With background colour I have more luck, but whether that solves the animation errors remains to be seen. Then on the Arduino, I add another wire and LED but also find oddities in testing some components. Click the image to watch the video.
BeagleBoard/monorail: With the new position, do I still have drag? Restoring the connetion to the ground-rail and testing: what works? Then: derailment. Why? What happens? Do I need another reconstruction? Click the image to watch the video.
3 November
Arduino Mega2560: Using all 4 oscilloscope probes, I notice some SPI spikes but not as expected. Solving some byte/int/* issues and adding some monitoring code at the Mega2560 side, I find some oddities. How about the Uno side? Algorithm changes, but will they solve issues? Click the image to watch the video.
Hand: First, some fixes to the arm-wiring. Then trying BASIC again, takes off in search for some solutions... USB, serial, wine and some surprising results. So what works? What doesn't? Click the image to watch the video.
RPi: Testing the ADC again, but using a multimeter to check voltage. Then: is the GPIO ok? A pin test will show. After a reboot: what does the oscilloscope show using 4 probes on a µs timebase? Some surprise...but also questions. Click the image to watch the video.
Mirft2: Starting with a frame reconstruction because of a sliding gear, I also move the connections for the front sensors to the digital input. Then it's time for image processing: ftrobopytools and OpenCV. What works and what doesn't? Click the image to watch the video.
Mydfir: With the line following problem, another attempt to fix it. But how? First: how are the sensors aligned? Does the signalling work? Are the sensors at the correct height? Some reconstruction seems needed. Then the floortest: how does it respond? Click the image to watch the video.
Arduino Yún: First focus: is the voltage going from the RC circuit to the LED visible on the oscilloscope? Then, how can the wiring of the 2nd RC circuit be changed back? Next, the NTC thermistor...do I have a lense-lamp to heat up the NTC? Of can an LED substitute? This needs some rewiring and a gEDA drawing. Click the image to watch the video.
Discovery: Continuing with OpenCV& ftrobopytools: what works and what doesn't? OpenCV on the community firmware only, and what? Errors or not? Then, a battery problem and it's not the bad one. Click the image to watch the video.
Arduino MegaADK & Android: Going on with JavaScript to detect elapsed time and display text at a location, results aren't coming easy. Then trying to get the voltage over a capacitor & an LED displayed on the oscilloscope, the timebase reveals what may have been a problem. Adding a wire and some code, the monitor shows clear info. Click the image to watch the video.
RPi2 & ROS: Further attempts to get callback3 working. What would help? Other type of data? Less data? Checking electronics? Click the image to watch the video.
fischertechnik convention 2017 Schoonhoven: a 45 minutes video compilation and 35 photos.
27 October
Arduino Mega2560: Once again: do I get both SPI transfers working? And back? Trying code, I'm in for a surprise. Going back to ordinary C, I face quite a few differences, so how to go on? The SPI itself works, given the oscilloscope signals, but not quite as it was. Click the image to watch the video.
Hand: Another attempt to use BASIC and upload to the interface using FtLoader. Following a hint I use an USB-RS232 converter and a serial cable...which after a work-around does connect. But will it work? How about USB with a time out? Click the image to watch the video.
RPi: Using ESD to mount new ADC & LDR to avoid any possible electrical damage. Then with all probes connected to visualize SPI, will anything work again? Will the Adafruit check with the resistor between MOSI & MISO work? Click the image to watch the video.
Mirft2: First, an attempt to lock the red gear with plastic, then some frame enhancement. Next, using python3 to implement OpenCV and using ftDigiCam.py as an example for ftrobopytools. Question: will it work? Finally, using Android with the TXCamdroid app to check on the camera. Does it work? Click the image to watch the video.
Mydfir: For better linefollowing I install a 2nd sensor. But where to put it? And how to connect the line to the interface? gEDA comes in again. Then the Python needs to be adjusted; and are 1 and 0 still the same? Click the image to watch the video.
Arduino Yún: Starting with gEDA to check an RC circuit and voltage, the focus is to measure the voltage over the capacitor and LED. Why isn't the oscilloscope showing all signals? Then, I change some code to correct things, but it this a good action? Click the image to watch the video.
Discovery: Second time to try using OpenCV but also ftrobopytools. Will it work or do I miss something? From github I take ftDigiCam.py as an example. Does it work? Finally, with the floortest, I also use my Android tablet with the TXTCamdroid app. How will this work? Click the image to watch the video.
Arduino MegaADK & Android: JavaScript/Android: I finally find the location where the time is printed but the time not what I expect. Then i realize I make a mistake, and find some oddity: a negative time?! MegaADK: time for measurements: where to place the probes and an odd result. Or is it? What is the timebase? What's the voltage? What should I expect? Click the image to watch the video.
RPi2 & ROS: Last time I created a 3rd callback and got rid of an irritating error. The question is: does this new callback do what it should do? I move some code and test, with a surprising result. How do callbacks work? How many can you use? Click the image to watch the video.
BeagleBoard & monorail: More tests are followed by reconstruction and balancing. Weird signals, and what do the wheels do? Another reconstruction/replacement, but is it solved? Then with the new balancing, a little test with a surprising outcome. Click the image to watch the video.
20 October
Arduino Mega2560: Trying to improve the SPI and the oscilloscope signal on the Uno: adding the 4th probe, changing the algorithms on both sides. What goes wrong and why? Inconsistent SPI throughput: why? 235-35 isn't 48... Click the image to watch the video.
Hand: New attempts to upload BASIC leads to testing ROBOPro, FtLoader and diagnose on different computers. With some surprising and unexpected results. Click the image to watch the video.
Mirft2: I have decided to use the camrea again since I've found out that I can use OpenCV on the community firmware. However, I'll first have to grab an image..and copy it. Which proves to be a challange. Click the image to watch the video.
Arduino Yún: Before going further with the NTC thermistors, I find a button or port gives the wrong throughput. Testing reveals a cause, but how to solve it? It gives both hardware and software but will it all work out? Then back to NTCs: what's up, really? Click the image to watch the video.
Discovery: Adding a camera to be able to correct the trajectory, but (of course) there are some issues. Images are 0 bytes, scp doesn't work, ImageMagic isn't installed. I want to try OpenCV but that's no use yet. Click the image to watch the video.
Arduino MegaADK & Android: This time, starting with the Arduino, I add a fischertechnik photo-transistor, do some necessary rewiring, coding, tests and adjust the wiring schema in gEDA/gschem. The oscilloscope shows nice results. Then the Android: timing issues don't dsiplay on screen. But why? When I find out, the animation fault shows up..amongst another one. But does it work? Click the image to watch the video.
RPi2&ROS: Trying to solve the hardware issues, will this work out? Then back to Python: the 3rd subscriber..what's wrong with it? It can't really be another tuple, but then what is? Finally I find a solution (I hope). Click the image to watch the video.
BeagleBoard/monorail: Testing again for power interruption, I first get weird signals on the oscilloscope. After finding a wiring oops, I continue use diagnose and Python and observe weird motor behaviour. When the lights flash again, I watch at gEDA but also find some other behaviour I can't explain yet. And at least I get an error. Click the image to watch the video.
13 October
Arduino Mega2560: Focussing on SPI to and from the Uno, I first have to replace a potmeter. gEDA needs no adaptation. SPI: why does the communication go wrong? I find some mistakes in my code, but are those the culprit? Click the image to watch the video.
Hand: Testing the hand and arm again, solving a little switch issue, in preparation of a programming change. Then: from Python to BASIC. Does it work? Or is old software due to fail. Click the image to watch the video.
Mirft2: Starting with the frame: it shifts again, so a fix is needed. Then a close observation of the legs: they walk the wrong direction. Oops. And 4 legs are disconnecting from the gears and need a fix. Next: will the old WiFi pc-card give the laptop connection to the controller? Time for some code fix for the direction...will the community firmware work now? Finally: a wiring change design in gEDA. Click the image to watch the video.
Arduino Yún: Due to circumstance, I have to replace a potmeter. Will it work the same? Checking signals, I also have to replace a transistor and for safety add a diode and change the circuit in gEDA. But does it actually work out? Do the propellers have any effect at all? Click the image to watch the video.
Discovery: With both versions of the software on both versions of the firmware, what are the results? And on the floor, what are the results? It's time for enhancement... Click the image to watch the video.
Arduino MegaADK: Using JavaScript again for reading system time and getting a delay on the Android tablet, some go fine and others don't. Then the Arduino: extending the circuit with fischertechnik. First draw in gEDA/gschem, then wiring and programming it. Will it work? Click the image to watch the video.
RaspberryPi2&ROS: Further with electronics vs Python. First: how's the circuit? Where are the probes? Then: why does an LED keep burning? And why does another not? Also: why is this tuple error? What has it to do with a publisher? Click the image to watch the video.
BeagleBoard/Monorail: After getting advise to check for a power dip, I set the oscilloscope to "slope". Then it's up to a lot of testing with remarkable results. But is the cause clear? Click the image to watch the video.
6 October
Arduino Mega2560: Focussing on SPI, where does it go wrong? Slave or master? Checking the example, I find a few differences. But will it solve the problem? Then something goes oops, but what? Click the image to watch the video.
RPi: Investigating further on dev.spi(). Numbers don't matter seemingly, neither does wiring. Searching on the delivers an alternative, but installing gives a problem until github is done. Then no errors, but will it finally work? Click the image to watch the video.
Mirft2: Last time the shorter legs caused a problem so I replace them and find again that on the ftc firmware nothing works. Time to compare the codes on the default side. What's wrong? What's right? Click the image to watch the video.
Arduino Yún: Using gEDA to clarify (and clean) the circuit, then compare the code with NTC results, increasing the delay. Finding it necessary to clarify the code...but why don't the LEDs work? And why is the oscilloscope output odd? Click the image to watch the video.
Discovery: Is the code on both firmwares the same? And how does code from one firmware respond on the other firmware? Testing on the oscilloscope and the floor with both firmwares ad code versions. Click the image to watch the video.
Arduino MegaADK: Continuing with delay: why doesn't it work? Version? Length? Platform? Then: the oscilloscope gives an odd view of signal, but why? When the problem is found, the question is...how did this happen? Then, an idea for a new experiment. Click the image to watch the video.
RPi2&ROS: Extending and changing the messages brings new ideas but will is work? Minding the paths, the messages gives reason the build again, but what works? Errors bring back confusion. Click the image to watch the video.
BeagleBoard/monorail: Starting of with testing which takes a weird turn: no interrupted FtThreads etc. I decide to draw the wireplan. Then: what's wrong with my software?! Why does only the diagnotics work? Click the image to watch the video.
29 September
Arduino Mega2560: To protect the transistor circuits I should place diodes. This leads to an adaptation in gEDA and some improvisation for a few diodes. Then, values of potmeter and LED: what's right, what's not entirely right? Finally, SPI...does code change and value change matter? Click the image to watch the video.
RPi: Starting where I left off: putting the resistor back betweem MOSI and MISO. Then some rewiring, voltage measurement followed by a major oops. Then: what's wrong with the code? Time for ADC channels programming info (pdf) and some gEDA. Click the image to watch the video.
Mirft2: First I need to fix part of the gear, which ends up slightly different than I thought. Then the focus shifts to the middle legs: they should be shorter but how to solve that? A gear problem turns out to be a recurring frame problem. Then: software and firmware...which ends with a very big question. Click the image to watch the video.
Arduino Yún: Regarding the control of motors, I've missed info about diodes to protect transistors. I have to use them. Then I find I have to rewire the NTCs circuits. Will everything work? The oscilloscope gives a nice answer, but the ssh output should be slower. Click the image to watch the video.
Discovery: After the Dreieich demos, it becomes clear that results don't guarantee anything. Starting with the default firmware, several tests show different behaviour but not even that is consistent. A floortest shows a big change in wifi range and goes very oops, and a test in community firmware shows even more. What's what? Click the image to watch the video.
Arduino MegaADK: How can the code be changed for delay and to drag? Will an empty for-loop help? Then the board: rewiring RC for the button and will changing pwm visibly change behaviour? Click the image to watch the video.
Compilation videos: fischertechnik convention 2017 Dreieich, Germany. 2 full-HD videos: 30 and 40 minutes long.
22 September
Arduino Mega2560: Starting the mapping of electronics at the Uno side. Then: why doesn't the SPI motor work? Some tests and a replacement. Will it work? Next: SPI code at the Uno side: it has to do it at a switch-status. How to accomplish that? Click the image to watch the video.
RPi: According to this I would get a better NTC circuit although I use a lower voltage. This also leads to a different resistor setup and some software changes. Because I still don't get a nice result (all 0) I try hints according to this link. Will this work out? Click the image to watch the video.
Mirft2: Starting with a frame/gear problem, the infamous red gear problem acts up again. After that the weight shows to be a problem. Next, the ssh connection to the ftc firmware is irritating, what's up with the motors, and which of the 2 programs is original? Click the image to watch the video.
Arduino Yún: Using gEDA to get into the topic, the symbol for resistor will be changed into the international version. Then, the first rc-circuit needs a button relocation. Next: adding an LED to the NTCs and it turns out that I need info. Click the image to watch the video.
Arduino MegaADK: Again: javascript..what has to be changed? Adding some random stuff and where's a keyboard? Replacing a breadboard, changing the rc-circuit. Will everything work? Click the image to watch the video.
Discovery: Starting with a front reconstruction, but will it help? Then testing with both firmwares, what's the difference now? Floortest for larger distance: why is this strange left-side course happening? Click the image to watch the video.
RPi2&ROS: Stepping back in time: 1 message! Then: why keep I getting an error? Accidentally(?) solving it, brings back another issue which reminds me of something to do in each terminal. Then, does everything really work the way it did? Click the image to watch the video.
TeamBuildingDay 2017: A full-HD video of this exiting engineering challenge. Pictures here.
15 September
Arduino Mega2560: Using gEDA to bring clarity in the circuitry, I think I find a wiring problem with potmeter2. Then rewiring the SPI motor should solve it, but this goes an unexpected way. Then an oops with the Mega2560 monitor. Why? Click the image to watch the video.
RPi: Checking the circuit, I have to reconnect the LDR potmeter. Then updating gEDA to put (almost) everything into schematics which prompts a question on the NTC. Then changing the ADC connections: what works? Adding another potmeter for a fixed resistor. But will it work? Click the image to watch the video.
Mirft2: After last time, I have to check the wiring between the controller and battery and to the motors. Then, there's a problem with the ssh connection. But why? A test show that something is wrong with the gears but also with the software? How to go on? Click the image to watch the video.
Arduino Yún: Using gEDA, I map all electronics that are on the breadboard. Then: will the RC circuit work if the elco is being replaced by a fixed (unipolar?) capacitor? Or is the capacity too small? Then: what's the best sequence in the circuit? How does a simulation in Scilab show? Click the image to watch the video.
Discovery: Checking straight line vs. diversion still gives seemingly random results, despite code changes. So that to do? One reconstruction seems necessary, but will it bring a solution? Click the image to watch the video.
Arduino MegaADK: Continuing with mouse action and text: can I get the text, can it larger, can I delay it? With the board: adding an RC-circuit brings in gEDA to show what is connected. Does the new circuit work? Click the image to watch the video.
RPi2&ROS: Trying to get behind the reason of the ImportError, I do several experiments. Besides this, I use gEDA again to layout my electronics. Finally, a decision is made. Click the image to watch the video.
BeagleBoard/Monorail: Checking connections, manual movement and speed reveals trouble. Do the diagnose software and my show the same? What have connections and threads in common? Click the image to watch the video.
8 September
Playlists: The June and July weekly playlists haven been removed.
Arduino Mega2560: Focussing on the motor at the Uno side: why doesn't it work anymore? After some measurements, it's time to add some electronics and adapter the code to it. This turns out to be revealing, but how to solve it? Click the image to watch the video.
RPi: With the circuit not working, what's wrong? Some new measurements point to a resistor, but that seems unlikely. Replacing seems needed. but how? A potmeter seems the only means available, but will I get 10kOhm? And then again, will it work? Click the image to watch the video.
Mirft2: Time to finish the frame reconstruction, which ends up doing some wiring. Then power issues can't leave me alone. After a few tests using Android, I decide to go for the oscilloscope and find more strange results, of which wiring is just one. Then when I want to switch firmware, it goes bad with the key. This makes me to buy another microSD card which after software install makes things go fine finally. But then other issues turn up. Click the image to watch the video with full HD camera segments.
Arduino Yún: After checking the circuit from last time, I decide to add a simple RC circuit. Using Scilab and gEDA/gschem I design the circuit and comparing it to examples on the net, I find I may have to replace a component and add one. But it seems that without the replacement, it works, kind of. Click the image to watch the video.
Arduino MegaADK: Continuing with programming the Android tablet, I correct a mistake for the mouse. Will everything work fine now? Then testing the circuit again expanding the electronics and code. Click the image to watch the video.
Discovery: Trying to get more results ends in a big oops: batteries fail while freshly charged. So is it the battery or the controller? Using the AC-adapter, will things be better or again power-off? Back to ROBOPro programming: this isn't making things any easier (yet). Ending with a floortest, things go bad again. Click the image to watch the video.
RPi2&ROS: Another attempt at getting the node and messages back to work. Any typos, re-building, and checking the messages: what's there to fix? Then checking the electronics..does that still work? Click the image to watch the video.
BeagleBoard/Monorail: Showing a new setup with probes and trying how everything behaves. Then some surprises with ground and software raising questions. What's going on and why? Click the image to watch the video.
1 September
Arduino Mega2560: First task: to get a motor working again. But what's needed? Replacing electronics? Changing values? Swapping wires? Does anything work? Will measurements reveal something? Click the image to watch the video.
RPi: So why doesn't the ADC/LDR give good results? Measurements show a possible issue with voltage, but why? What does the ADC need? What does the LDR voltage show? Click the image to watch the video.
Mirft2: Starting with a necessary frame reconstruction...but how? Then a modification of the front-right-side gear. Will it work? Then, to avoid hassle with the probes, I use the portal or crane again. What will the results be? Timing ok? What else? Power? Click the image to watch the video.
Arduino Yún: Focussing on the right-side motor: why won't it be controlled? Checking code and wiring doesn't resolve it. Then: which pins are what? Checking here, reveals I should use another pin but which one? Finally I change the pins and a value with a nice result...although with a twist as well. Click the image to watch the video.
Arduino MegaADK: Continuing with programming the Android tablet using JavaScript. Of course, the devil is in the details...and JavaScript has varieties. Then the MegaADK with buttons: correcting some oopses in the code, things seem to work after all. Click the image to watch the video.
Discovery: Because of the probes, I change the setup into a "portal" with the probes hanging down. Then after a test I find that the code is anything but ok...not sure where my mind was last time but this wasn't good. Then ending with a floortest: how will that go, with the changed code? Click the image to watch the video.
RPi2&ROS: Starting with the monitor, I get back to the messages. In my attempts to solving the errors, I get closer to the solution, to end for now with a big questionmark. What's up?! Click the image to watch the video.
BeagleBoard/Monorail: Starting with a hardware explanation, I continue with pwm investigation using diagnose and my own software. Trying some more leads to an interesting discovery of difference. But is it the key to the problems? Does adding another probe give a clue? Click the image to watch the video.
25 August
Playlists: All playlists for May have been removed since they're not being watched frequently.
Arduino Mega2560: First, before recording, I replace the big red LED by a small green one to see if the 2nd motor will run. Will it? Then back to SPI: is the signalling correct? Why does the motor of the newest mechatronics not run anymore? Is it wiring? Then the "print sensorvalue"? Why does this go wrong? A surprising answer, requiring a recode, but why does it happen? Finally, I have to replace rope by chain. Click the image to watch the video.
RPi: What I didn't do last time, I start with now: using Scilab and gEDA to explain the LDR/button circuit. Then altering the code to check for any SPI results on screen and the oscilloscope. Will anything work? Then an oops. But why? Click the image to watch the video.
Mirft2: Because of flexibility issues, the front has to be reconstructed. Then a test with the 3rd leg shows some problems indicating a frame reconstruction is a necessity. Then time for the oscilloscope: how do the pwm signals from the controller compare to the pulse counters from the motors? Click the image to watch the video.
Arduino Yún: Time to check the code because of the motors: why can't motor 2 be controlled? Would adding a button help? This requires once again some improvisation. Then: swapping motors. This brings some insight...but a solution as well? Click the image to watch the video.
Arduino MegaADK: Trying more things on the Android using a language turning out to be JavaScript. See here for more information. Then why don't the buttons work? Changing the code (AVR-C) works out nicely, at first. Then it goes odd. Why? Click the image to watch the video.
Discovery: Testing the pwm and counters again gives some issues with wiring. Then, are the oscilloscope probes causing diversion or not? Changing code and situation, but what's up, really. Click the image to watch the video. Video parts in HD.
RPi2&ROS: Starting with adding an output pin for a probe to measure data without electronics, it gets odd when if comes to the button response. Then, message robot_pi2 again...finally some progress but will it work? Click the image to watch the video.
Beagleboard/Monorail: After last time, again pwm via both diagnose and software. is it really that much different? I'm in for some surprises on both sides after changing values and locations. So what is the real cause? Click the image to watch the video. Video parts in HD.
18 August
Mega2560: Trying again to capture SPI, placing the probes. Then a motor oops..why? Extending the circuit with an LED, replacing a wire. Does anything help? Then: adding some code to control the transistor & LED. But what's the voltage? Click the image to watch the video.
RPi: Once again: ADC with 2 LDRs, and NTC via SPI. Since there's still very occasionally some data coming through, it can safely be assumed it ='s not broken. But then what's going on? New info: SPI-test advise: 1 MHz. Also all 0's gives another advise. I decide to change the circuit. But will this be better? Click the image to watch the video.
Mirft2: Putting the robot up to test again with the oscilloscope: what will it show? Is the timing correct? Some power oopses, or is this "oh shit"? Some wiring issues, and a multimeter comes in. Click the image to watch the video.
Arduino Yún: Connecting the oscilloscope probes to the potmeters and motor circuits. What do they show? Some oopses, and why don't an LED and a motor respond properly despite the shown signals? The code looks good. Click the image to watch the video.
Arduino MegaADK: Again trying to program the Android and realizing something about code. Then the board: getting some values, changes and adding a button. Does it all work? Click the image to watch the video.
Discovery: Continuing where I ended last time: measuring signals with the probe. Both motors and both pulses...so 4 probes. And both firmwares: community and default. This gives quite an insight that things don't go well... Click the image to watch the video.
RPi2&ROS: Trying to get the messages solved, I meet with a mysterious problem. But what? Then also: why does the red LED not work? After some code checking both are solved..kind of. Click the image to watch the video.
BeagleBoard/Monorail: Starting with strange effects, odd signals and new ideas. Then: re-adjusting the carriage and a diagnose. Why aren't the signals the same? Click the image to watch the video.
11 August
Arduino Mega2560: SPI: measuring SCL, SDA, CS; do all signals make sense? Connection oops: why? Then: code change on the latest mechatronics switch...will it work? What about timing? Some issues to deal with next time. Click the image to watch the video.
RPi: Finding out what's on SPI: SCL, SDA and CS, putting the probes accordingly. Then: what setting should the probes have? Are the LDRs wired ok? Is the NTC wired ok? Should the code be altered? With so few measurement results, what's going on? Click the image to watch the video.
Mirft2: Starting with an attempt to solve the rattlling. A close observation bring a solution...hopefully it's permanent. Then, oscilloscope and probes. What work? What doesn't? Again, power off's and replacing accupacks. Sigh. Measuring voltages gives no clues. Or do they? Click the image to watch the video.
Arduino Yún: After trying to measure NTC values, it's a better idea to use an LED as a signal and wire it up to pin 10. Then some code is added. The 2nd potmeter should be replace, which needs rewiring. And what does the oscilloscope show? Click the image to watch the video.
Arduino MegaADK: Starting with the Android tablet: can I get things changed? Location? Background? Width? Some oopses but some progress as well. Then the electronics and code: the oscilloscope shows a line I'm not happy with, so once again: timing. Then value changes show a difference but can it be explained? Click the image to watch the video.
Discovery: Ride with a curve instead of in a straight line but .. it does happen more than enough. But why? After a floortest, it's time for the oscilloscope again. What does it show? After a setting oops, a clear signal is shown. But what does it tell? Click the image to watch the video.
RPi2/ROS: Continuing with the subscriber and trying to find out what's wrong with the data. Again an error on rostopic for publispeaker3. Solving it fine, but why does it happen? Then: solving data2..and again...But will this work? Click the image to watch the video.
BeagleBoard/Monorail: Connecting the oscilloscope probes to the rail, first test if it runs anyway. Then: do the signals represent what is expected? Is the time-base correct? Can the program be changed? Several oopses. Click the image to watch the video.
4 August
Arduino Mega2560: Probing the motors with the oscilloscope shows some value differences. Then: time to add another mechanical sensor-trigger device. Will the wiring fit into the existing stuff? It brings some code changes too. Will it work or go oops? Click the image to watch the video.
RPi: First a test that takes a bit longer than expected, then expansion of the circuit with an NTC. After changing the code: what do the screenoutput and the oscilloscope tell? Does the multimeter tell anything? Click the image to watch the video.
Mirft2: After checking feet, it's time to upgrade firmware: both default/ROBOPro and cfw (community firm ware). For the cfw, this meets with an issue: WLAN. Meanwhile, the gears still act up and I want to do a test using the oscilloscope. On the other laptop, can I just login to the TXT controller? Click the image to watch the video.
Arduino Yún: First testing if everything works, I then focus on the NTC. What can I measure on the oscilloscope? This turns out to be interesting. Bringing in the multimeter as well, what does it show? Then adding an NTC, some more details shows up. How come? Click the image to watch the video.
Arduino MegaADK: Another test using Processing and Android, now using sensors. Will it work? Then, some electronics with an oscilloscope. Why doesn't the 2nd LED work? Some oopses to solve...will it work? Click the image to watch the video.
Discovery: Starting with a floortest, things seem to go well....mostly. Some oopses, but why? Then, why not check the controller using the oscilloscope. Then another oops in the connection...why? Overall, a nice change in the experiments. Click the image to watch the video.
RPi2/ROS: Trying to get things running again, step by step. First some wiring correction to the oscilloscope, then a coding mistake. No harm done, and trying to echo 2 topics with an oops. Solved with this info, will this work? Some ideas and changes for next time: change a parameter to avoid confusion. Click the image to watch the video.
BB/Monorail: Using the oscilloscope again, set to pulse, I need to find a better setting for a nice graphic. Then: when does it change? Is this according to expectation or not? What happens when the timing is changed according to the frequency range? Click the first image to watch the video.
28 July
Arduino Mega2560: Using the oscilloscope to probe PWM gives an unexpected result. But why? Will changing the wires give clarity? Then: will SPI show the data being sent? Needing a rewiring and getting an oops. What's SDA? Click the image to watch the video.
Mirft2: Starting with some foot correction, I have to investigate on gears again. Then a test with the middle legs: what happens? How to solve it? Also: could speed correspond with battery voltage? What do measurements reveal? Click the image to watch the video.
RPi: Starting with a camera oops, I continue with the ADC and LDR. When trying the oscilloscope, will it give the expected results? Changing the setup in electronics, what's the difference in measurements with 'scope and multimeter? Volts and resistance? All along the experiment, several more oopses. Click the image to watch the video.
Arduino Yún: When using an oscilloscope for pwm, it makes more sense to set it on pulse width. But which width? Also, does the circuit still work? Should the code be changed to a fixed frequency? Time to measure, convert using Maxima and match the 'scope to the multimeter. Click the image to watch the video.
Arduino MegaADK: First: getting something running on the Android. Following an example from here, it takes some effort, but with a nice result. Then using the oscilloscope: changing some code and adding electronics should bring clarity. Will a 2nd probe work? What's up? Click the image to watch the video.
Discovery: Testing everything again on the ROBOPro firmware: does it all work? Then the community firmware: floortest as well. Will it work without manual intervention? Will the camera work? Will the batterypack last? Click the image to watch the video.
RPi2/ROS: Trying the 3rd node again doesn't work, so back to 2 nodes. Also, replacing a switch. Then a big oops. Resource problem? Introducing the oscilloscope here as well. Does it work? After changing some code, it works but how? Click the image to watch the video.

BB/Monorail: With the current questions and issues: what will I learn using an oscilloscope? Voltage or anything else? Different screen setup: 2 camera's (actually 3). Then some oopses, but why? Click the image to watch the video.
21 July
Arduino Mega2560: First task: rewire the motors and check the voltage using the oscilloscope. Is there any difference? Then SPI: what's going on, if anything? An oops and restart brings solution, but what about the return? Solving a small coding mistake, but will this help? Click the image to watch the video.
RPi: Introducing a 3rd camera to show experiments with a brand new oscilloscope which brings challenges. Starting the software to read the LDR via the ADC brings a nice surprise. But how does the oscilloscope read out? Big RaspiCam and RPi oops. Then the ft LDR: what's the difference, if any? Click the image to watch the video.
Mirft2: Starting with a foot correction, I go on with sound. Then finally a big clue on why the gears don't work as they should, but how to really solve it? Again a power oops..what the ....?! Over to the community firmware: will this work? Time for more measurements. Click the first image to watch the video.
Arduino Yún: First task: replace the fischertechnik 3-wire switch by a compact 2-wire switch. Then: checking on an LED...what works and what doesn't. Measurements reveals nothing and everything. Rewiring and code checking reveals an oops. Or does it? Click the image to watch the video.
Arduino MegaADK: Trying to get Android connected to Linux, leads to mtp. But will Processing be connected to the tablet? Next, expanding electronics by adding a switch and changing some code. Nice to see this work out. Click the image to watch the video.
Discovery: Testing sound with some minor code changes is showing some nice results. Then: why doesn't the big program give sound? With sonar in the way during the desktop-tests, back to floor tests with some additional tests: power, driving straight line, touch, light, sound and turn tests. What goes wrong or right? Some oopses... Click the image to watch the video.
RPi2/ROS: Going on with the photo-transistor: does it still work? Then: again expanding with adding a publisher to the subscriber and a 3rd subscriber node. What does it take? Will it work? Click the image to watch the video.
BB/Monorail: Testing the rods' positions and contactsurfaces, it's odd. At times it gains full speed, then a power out? Close observation of the tracks reveals another issue, but how important is it? Also, results aren't constant. Why? Click the first image to watch the video.
14 July
Arduino Mega2560: Starting with some electronics: the right-hand motor doesn't do anything, neither does the LED. So what's up? Then, back to SPI: some recoding seems necessary but will it make everything work? Click the image to watch the video.
RPi: First task this time: implement wiringpi SPI with the MPC3008 (pdf) ADC, which turns out to become a problem. So what about SpiDev? Then, getting the wires correct and the resistor should be 10k Ohm. Finding the resistor finally succeeds after using the analog multimeter. After coding using the example, what does the screen output show? Click the image to watch the video.
Mirft2: First an attempt to reconstruct the feet and a test. Then a sound check and adjustment to the code. Next, another gear oops and something unexpected with the power. What's going on? Click the image to watch the video.
Arduino Yún: Checking LEDs using measurements, I find something is odd. Time for some rewiring and recoding...and again. Then when things seem to work...why doesn't it work the other way? Click the image to watch the video.
Arduino MegaADK: After installing Processing, I find out it's not the same as the usual IDE. In more than 1 way. Then there's an oops in the setup, with both hard- and software. Finally, back to code. Click the image to watch the video.
Discovery: Again, sound. What's the difference between the demo and my code? Testing with while's and if's reveals a threading issue..until I realize what's missing in my code. Then again: it's not in the demo either. So what's going on? Click the image to watch the video.
RPi2/ROS: So why does the red LED have this odd behaviour? And why does the switch LED have such a delay? After checking the wiring, measuring voltage shows an oddity. This leads to a code change after which everything seems to work (so far). Click the image to watch the video.
BB/Monorail: Continuing with the squeeze and pressure...what does it do? After close observation, I noticed something remarkable. Why does that happen? Then I decide to adjust a rod. Will this help? Click the first image to watch the video.
7 July
Mega2560: Last time, a transistor was the cause of a motor not running. How about now? Then, SPI fails to run. After code checking, it may come down to wiring. But then again, some code changes leads to unexpected results and questions.Click the image to watch the video.
RPi: Will the IR line sensor work? Scilab finally gives a clue. Then: will the LDR work via an ADC? Searching the web reveals how to set it up, but also different ways to do it. The wiring leads to an oops and some familiarity in wiring. Click the image to watch the video.
Mirft2: Last time ended with a gear coming off during a test. How? After fixing it (again), a power issue? How come? Gears issues show clearly in screen output, but is it consistent? And how about the ROBOPro firmware? Click the first image to watch the video.
Arduino Yún: Checking the circuit, the 2nd motor LED doesn't work. Then, another LED fails as well, so testing is required. On pwm: putting analogWrite in the setup shows hardly any progress. Then a moment of insight and more testing. Another oops? Click the image to watch the video.
Arduino MegaADK: Introduction to the board, followed by a first setup and simple program using electronics. Then: how to connect to the Android? What is Processing? Where to get Android DK? Click the image to watch the video.
Discovery: Using the ROBOPro firmware, the focus is on sound. A new program giving errors, but why? What's the cause? Adding screen output gives some clarity. but all? Click the image to watch the video.
RPi2/ROS: The after-crash of last time: replaced microSD card, reinstalling software. Then testing and replacing some electronics. Something doesn't go as intended, but why? Click the image to watch the video.
BB/Monorail: Pushing the rods doesn't matter, but pushing the tracks gives a surprise. This leads to some experiments but do they give a clue? Click the first image to watch the video.
30 June
Arduino Mega2560: Starting with some electronics because a motor doesn't work. Will a replacement solve it? Then: mechanics, since pin 9 doesn't show both high and low. Measurements and code review bring clarity. Next: SPI. Why doesn't it work, really? Some bog oops, and a possible new code issue...Click the image to watch the video.
RPi: New experiment: trying to get a fischertechnik IR sensor to work: measurements shows it does work, kind of. Then with electronics, nothing. So once again: Scilab, which gives a not so nice surprise. Click the image to watch the video.
Mirft2: Another attempt on frame reconstruction, but will it work? Putting everything together, kind of, and tests shows some issues. But what's the cause? Changing firmware, shows something unexpected. It it repeatable? Click the first image to watch the video.
Arduino Yún: Since the right-side motor not working, the question is why. Some tests point into the electronics direction. After the problem is solved, back to pwm. But how? Some searching reveals possible solutions, but will it work? Click the image to watch the video.
Discovery: After last time, testing the battery wiring. Will it be ok now? Then: still some missing behaviour on sound, lamp and turning, but why? Time to use a simple demo, with surprising result. Then a battery oops...but why? Or is it? Click the image to watch the video.
RPi2/ROS: The RPi2 shows problems booting and once booted it doesn't have a working network connection. Will things work using a work-around? All files are there but will they run? Click the image to watch the video.
BB/Monorail: Focussing on the start of the track, close analysis reveals why the motors stop in the catcher. Then some testing ends in a slight adjustment, but is that really the solution? The ords really need to be replaced... Click the first image to watch the video.
23 June
Arduino Mega2560: Again SPI: finding an oops in the code and a "new" idea. Will it finally work? Then some electroncis: why doesn't 1 motor work? Adding a check in the code reveals a problem. But what's the cause? Click the image to watch the video. Sorry for partially not so good audio.
RPi: Another (final?) attempt using pwm on the motor. Does it work? Then back to the LEDs. And a resolution change doesn't show what's really happening. But when does it? Click the image to watch the video.
Mirft2: To solve the rattling of the gears, a frame reconstruction is needed. While checking on it, I find more things to solve so I take the robot partly apart. After some wiring stuff, will everything work out? Click the image to watch the video.
Arduino Yún: So with pwm, which does what? Measuring again..but will it reveal anything? Checking the rest of the pins as well. Then: why doesn't a motor run? Again, measuring... this reveals a problem, but where does it come from? Click the image to watch the video.
Discovery: Using the ROBOPro firmware again, I start with a wiring change involving the battery. Then, some tests on sensors..what works? Using ROBOPro to test sensor and lamp and rewriting some code. What works? What doesn't? Why? Click the image to watch the video.
RPi2/ROS: Are last weeks results still ok? Then expanding the circuit by adding some wiring, a port and some code. Will this work? Or is my idea of subscribing & publishing not possible? Click the image to watch the video.
BB/Monorail: Some inspection on alignment and parallellism. Where does it go wrong? Then a little adjustment of the power rods after an observation. But will it help? Click the first image to watch the video.
16 June
Hand: Testing the whole of the hand and arm shows a problem with the lower/vertical gearbox. Diagnose reveals a wiring issue, but is that all? Further testing shows some irregularities. Can they be solved? Click the first image to watch the video.
Arduino Mega2560: Bidirectional SPI: will it work by studying examples? Sure improves the knowledge of Arduino C (print).. Several attempts , recoding and then?! Click the image to watch the video.
RPi: Continuing with 2 camera's, a motor and pulsewidthmodulation: which values should be used? Using information from here, will it work? Too bad I don't have an oscilloscope. Click the image to watch the video.
Mirft2: First, adding feet to the legs: will they work? Then again: gears. Finally an idea why it goes wrong, but how to solve it? Also, wiring to solve. Then: the lamp..it works, but code is not really good. Click the first image to watch the video.
Arduino Yún: First, checking the 2nd potmeter: what type is it? Then: does it influence the 2nd motor anyway? Back to pwm: what does work? Some rewiring is needed, but which frequency is shown? Is this correct? Click the image to watch the video.
Discovery: First, I follow the advise to upgrade ROBOPro, both the software (via wine) and the firmware. Then: what works, what doesn't? So: sensor and sonar tests. This shows that the code needs some changes, but will it be better after that? Finally, a battery test. Click the image to watch the video.
Mydfir: With the line sensor being ok, it's time to check the algorithm. Using the diagnose there's an oops, but what's the cause? Wiring, motor, code? In the end, I find a small mistake but does it all work then? Click the image to watch the video.
RPi2/ROS: Trying to get the photo-transistor working, it's first Scilab again and find an oops corcerning OpenGL. Solved/saved by another laptop, I find that it should work. Back at the circuit, I find a big oops. Will it work then? Finally some recoding. Click the image the watch the video.
BB/Monorail: Considering the friction, the idea is to change the power rods. But how? And does this indeed remove or reduce the friction? Click the first image to watch the video.
9 June
Hand: First focus: improving the elbow after determining the physical limits. Then: can the lower gear be improved, or specifically: the carton. Then a big test. Does all work well? If not, why? Click the first image to watch the video. Instagram
Arduino Mega2560: An new attempt to make SPI bidirectional by using an example. With new insights I find some mistakes, and in the end it seems to work. Or not? Click the image to watch the video.
Mirft2: Checking on the gears which went odd last time..and in for a bit of a surprise. But then... what to do? How can things be solved ultimately? Click the first image to watch the video.
Arduino Yún: Time to change some wires and add a 2nd potmeter. Then some coding to incorporate it all. Will it work or go oops? Or both? Click the image to watch the video.
Discovery: Focussing on the original firmware: does it connect? If so, does it stay connected? ROBOPro shows fine except the camera and Linux shows fine. Increasing distance... does it matter? What does the screenoutput say? Argh and oops. Click the image to watch the video.
Mydfir: With a borrowed line sensor (thank you fischertechnikwebshop) I'm finally able to find out what's wrong and using ftdiagnose I'm in for a surprise. Then, the floortest starts with an oops, leading to yet another surprise which raises questions. Testing shows weird behaviour and a situation I didn't foresee. Click the image to watch the video.
RPi2/ROS: The 4.5V makes me doubt the GPIO, so I need to test if there's a problem. I need to add some electronics. First a calculation using Maxima and a simulation in Scilab. Then, will it work in reality? Click the image to watch the video.
BB/Monorail: Another try at speed: where are the frictions? Can the wheels be aligned better? Why does it stop? Is the carriage stable enough? Click the first image to watch the video.
2 June
Hand: It's time to replace the wrist to the motor; which is simple enough... Then the arm base should better be reinforced but is it possible? Also attention to the elbow which better be reconstructed. What's up with the vertical gear? Click the first image to watch the video.
Arduino Mega2560: First focus is on rewiring to get an LED working again, hopefully. Then some checking. Next, bidirectional SPI. How should it work? Questions and trying. Will it work or go oops? Click the image to watch the video.
RPi: First, solving an LED issue. Then, how to get the pwm motor frequency 100 - 200 Hz going. Is it possible? Using some more commands of the PWM API I get some clarity. But will it work? Click the image to watch the video.
Mirft2: Focus is first on the gear problems: would it be the guides? Or the wiring? Both needs some fixation but it solve it? Could diagnose via ROBOPro give some insight? Click the first image to watch the video.
Arduino Yún: Adding a 2nd motor brings some challenges: (re)wiring, electronics, software. How about pwm? This brings a surprise. Click the image to watch the video.
Discovery: Starting with the original firmware and meeting a problem. Then the community firmware and changing details: will those work? Back to origina firmware: will it go better? Click the image to watch the video.
Mydfir: Focus on colours again: can I get it working correctly? This time, using both diagnose and calibration program. Are there differences? Do both sensors work and keep working? Some oopses.. Click the image to watch the video.
BB/Monorail: Last time the 3rd wheelset didn't convince, so maybe some construction changes will help. Or do they? Close observation leads to insights and ideas. Click the first image to watch the video.
26 May
Changes: Now, the last made video of the week is on top of the list. Also, the videos can now be played ("bingewatched") via the weekly Youtube playlist.
Hand: Checking the vertical gears shows nothing is wrong, but why is it not always moving? Time for an overall test. And another oops. Then a fingers check: on and off. Algorithm? For safety also an arm improvement. Where to go? Click the first image to watch the video.
Arduino Mega2560: Starting with SPI, I decide to let the off-board LED burn. This results in finding a big oops. After solving this, I decide to rewrite some SPI code and again, the devil is in the details. Then, why isn't an LED working? Would rewiring help? If so, what's wrong with the "old" wiring? Click the image to watch the video.
RPi: With the cameras the LEDs show different behaviour...but it's also about the motor. With new data available, some checking and conversion is needed. My code doesn't seem to be far off, but will it work? Click the image to watch the video.
Mirft2: To do: replacement of some legs by stronger ones, inproving leg guides, correcting details and a few improvisations. Then: observations and tests. What goes wrong and why? Is it a motor, gear or some wiring? Click the first image to watch the video.
Arduino Yún: Using the console via ssh, what's the con and pro? Exploring the full NTC range and finding a critical potmeter value..but is it voltage only or frequency as well? Will measuring be conclusive?
Click the image to watch the video.
Discovery: During preparation on battery, the controller switches off frequently, so I decide to use the power-adapter. After some minor code changes, things seem to go well. Then: connecting to original firmware goes oops. So again: community firmware. Some more tests and a few changes. Not entirely satisfied, but... Click the image to watch the video.
Mydir: After testing the line sensor, now the colour sensors. For this, I have to adjust the calibration program. Then, will both sensors work fine or will strange results happen? The datafile reveals some but not all. In the end, what does diagnostics say? Click the image to watch the video.
RPi2/ROS: By lack of an ADC, back to the photo-transistor. In a different setup, will it work? Measurements should give a clue, screen output should too. Do they match? Click the image to watch the video.
BB/Monorail: Another attempt on weight distribution by widening the carriage and an addition, but will it help? Another view at the setup of spring vs. support reveals that it needs a fix or a removal. Also, another look at the code: why does it stand still? Click the first image to watch the video.
19 May
BB/Monorail: Starting with diagnoses and a camera, I finally find it's all working...in theory. So trying to view things from a different point and angle..will it clear up mysteries? Click the first image to watch the video.
RPi2/ROS: Next idea: using an LDR as sensor. Although being an analog component, if the voltage is high enough it can be a "1", low enough a "0". With the aid of the analog multimeter I find a few values. The question is: are they correct? How to go on? Click the image to watch the video.
Mydfir: I have to add a bit more code to fully cover the data. Then it's time for a motor-only test, which reveals a minor issue that can be resolved quickly. Next: a line-only test. Replugging wires shows no difference, so it's time for diagnose. What's up? Click the image to watch the video.
Discovery: After feedback from the ftrobopy developer and studying an example, I restructure a part of the code. This seems to work but I still find an oops. After restructuring a bit more code, things look better. Will it finally work? Click the image to watch the video.
Arduino Yún: Adding an NTC to the circuit to give the motor a purpose brings a wiring problem so I have to improvise. After adding some code, will it work? Considering the switch code hasn't changed, testing reveals it still works, but .... Click the image to watch the video.
Mirft2: I need to add robustness to the frame and find that more rebuilding is better. After changing the gears, it's time for a code change. Android first...it works, but also reveals that more robustness is needed. Oops. Then, code change on the other firmware works out but data acquisition is better. Click the first image to watch the video.
RPi: Leaving the motor for now (requested some info), I concentrate on the LED: timing. This has some nice effects (naked eye/camera/RaspiCam). What will happen when I add another LED to the pwm? An unexpected result and an oops... Click the image to watch the video.
Arduino Mega2560: Again, trying to get SPI working by example. Will it work? Then, 2 LEDs are misbehaving, or is there something else going on? What has it to do with power cycle? Some measurements. Click the image to watch the video.
Hand: The compressor needs improvement: the vertical situation isn't robust enough. Then the thumb and finger need some fix..which is kind of solved but then a problem shows: wiring or pneumatic? In the end, another wiring shows up..or is it? Click the first image to watch the video.
12 May
BB/Monorail: Observation of the carriage shows a possible balance issue, or is it? Why does the carriage hold at D6? Inspection of the screen output is reveals an odd signal and diagnosis confirms a problem. After (hopefully) solving it, there are still moments of questions. But what are the causes? Click the first image to watch the video.
RPi2/ROS: LED or lamp? That a good question... 2.4V, 3.3V or 5V? That's another good question. How to wire the photo-transistor? Yet another good question. In the end, it matters what works. Click the image to watch the video.
Mydfir: As announced last time, I'm re-enabling the datafile. This faces with me some questions about my actions in the past. Oops. The in-screen camera works nice, and the tripod comes in handy. What does the data file reveal? Click the image to watch the video.
Discovery: Starting with a power oops, I decide to create a data file. Testing this, I meet with another big oops. What's happening?! Then a floor test...Click the image to watch the video.
Arduino Yún: Will in/on-screen camera work here as well? Testing the combination potmeter/motor/switch gives an oops. Then the setting for Yún: can I make it connect to the internet? Back to hardware: would some recoding help? Click the image to watch the video.
Mirft2: Further reconstruction of the legs is needed, and the ftrobopy developer got back with an important hint so I need to change code. Testing it reveals that there's a big improvement but another reconstruction of the frame is needed. Click the first image to watch the video.
RPi: Adding another camera to watch over it. Trying to use the servo method of PWM to see if it makes nay difference. Then back to pwm: is the setup ok? Changing code once again, does it matter? Click the image to watch the video.
Arduino Mega2560: Using a webcam for in/onscreen video show resolution and fps gives a different idea of electronics than the naked eye. Trying SPI with a different example, rewiring, recoding..will it make a difference? Click the image to watch the video.
Hand: The compressor engine needs improvement, and after some thought I do "some" reconstruction. Which of the options/ideas will work out? Next, back to the thumb. Is it really that bad? Click the first image to watch the video.
5 May
BB/Monorail: A close observation shows a possible issue with the wheels that could slow down the carriage. Then the rocking behaviour: why? A look at the code reveals a possible cause. Then something else: the carriage suddenly changes direction. why? Click the first image to watch the video.
RPi2/ROS: Question: does this light sensor (ok, actually it's a photo transistor) work on 3.3V?! To check this, in comes a lamp. But what are the results? Is the screen output consistent with the multimeter? Click the image to watch the video.
Mydfir: Checking out the robot, focussing on line: what's happening. Some code changes reveal I may have to reseat some wires. Then: do the motors need a wire reseat? Again, weird behaviour. A decision is made.. Click the first image to watch the video.
Discovery: Looking at only the counters, the results are getting very weird. Would it matter to test both on and off sheet? Then, I find out why the webcam for inscreen camera doesn't work. So time for a change... Click the first image to watch the video.
Arduino Yún: Another test with the potmeter shows it still can control the motor. Can I get the switch in control now? This requires a code change and a test. Then the network settings: something is really off. But why and how? Click the first image to watch the video.
Mirft2: The front leg problem needs to be solve, obviously. But how? Another reconstruction is necessary. Then an idea comes to mind: more legs could be less weight to lift. Will this work anyway? Then some coding: counters check and differences. Click the first image to watch the video.
RPi: Another attempt on hardware pwm by changing the code: what works? what doesn't? Some reasoning leads to the question about another motor. What's next? Click the image to watch the video.
Arduino Mega2560: Looking at the hardware, I find a few odd things. Why are they happening? Examining the SPI code reveals I made a small but possibly important mistake. Will this fix it? Examining the examples I find something that raises questions. Checking the hardware further...but will it work? Click the first image to watch the video.
Hand: I have to reconstruct the compressor, the question is exactly how. By trail and error I find a probable nice solution. Will it work? Then testing the fingers again, there's an oops. Double oops, actually. Click the first image to watch the video.
28 April
BB: So why doesn't it work at start? Removing sleep() from the code gives an unexpected result. Oops. Then close observation reveals more causes for keeping still and slow movement. But how to solve those? Click the first image to watch the video.
RPi2/ROS: The light sensor still raises questions: how does it work, exactly? Is the wiring correct? How do you measure it? So it's time to check it all and hopefully find out. Click the image to watch the video.
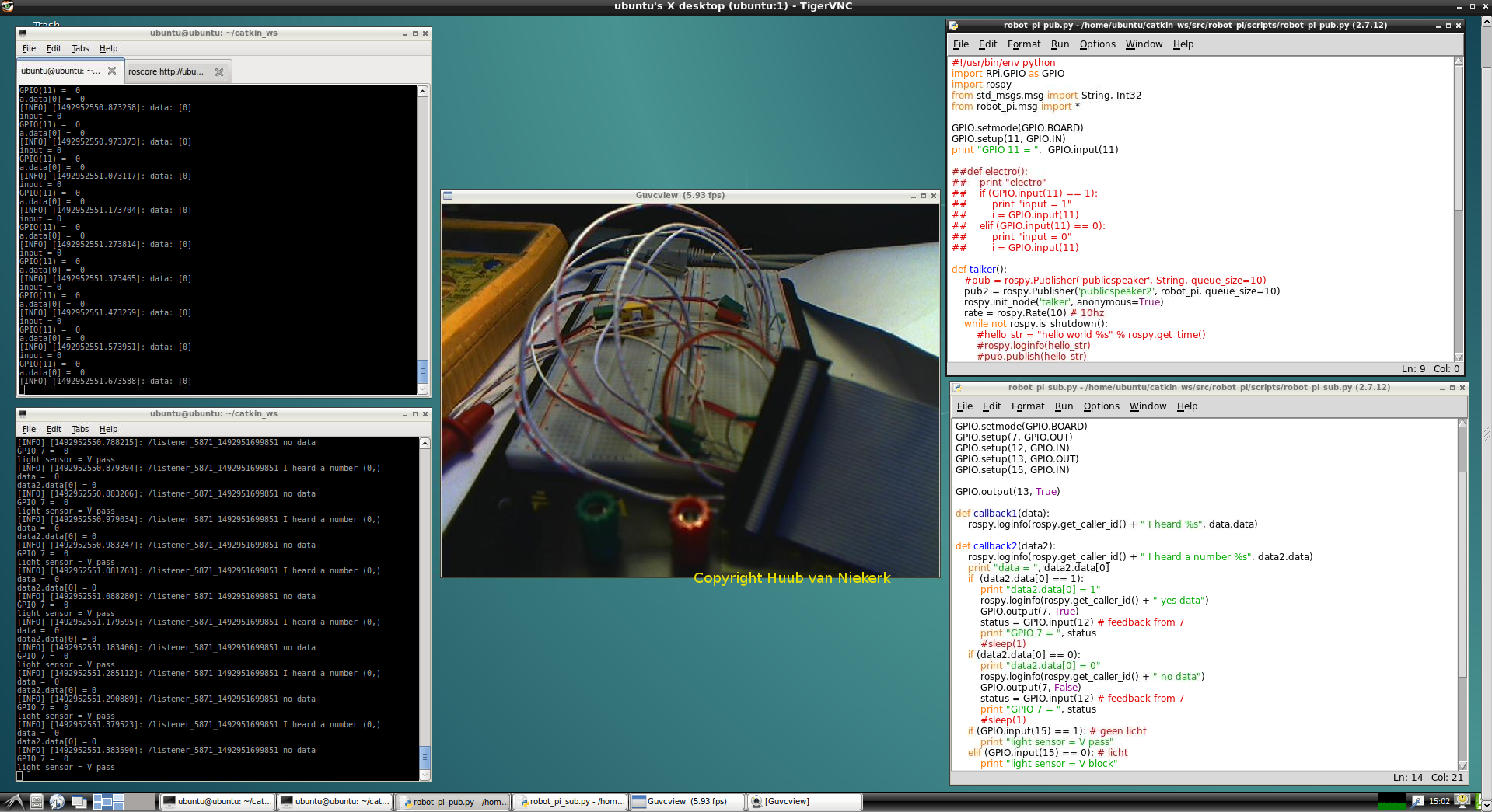
Mydfir: Starting with odd behaviour, I check for buzzer code and change some timing. Although this works out nicely, it gets clear something has changed with the colours. But what? Also, what about the motors? Click the first image to watch the video.
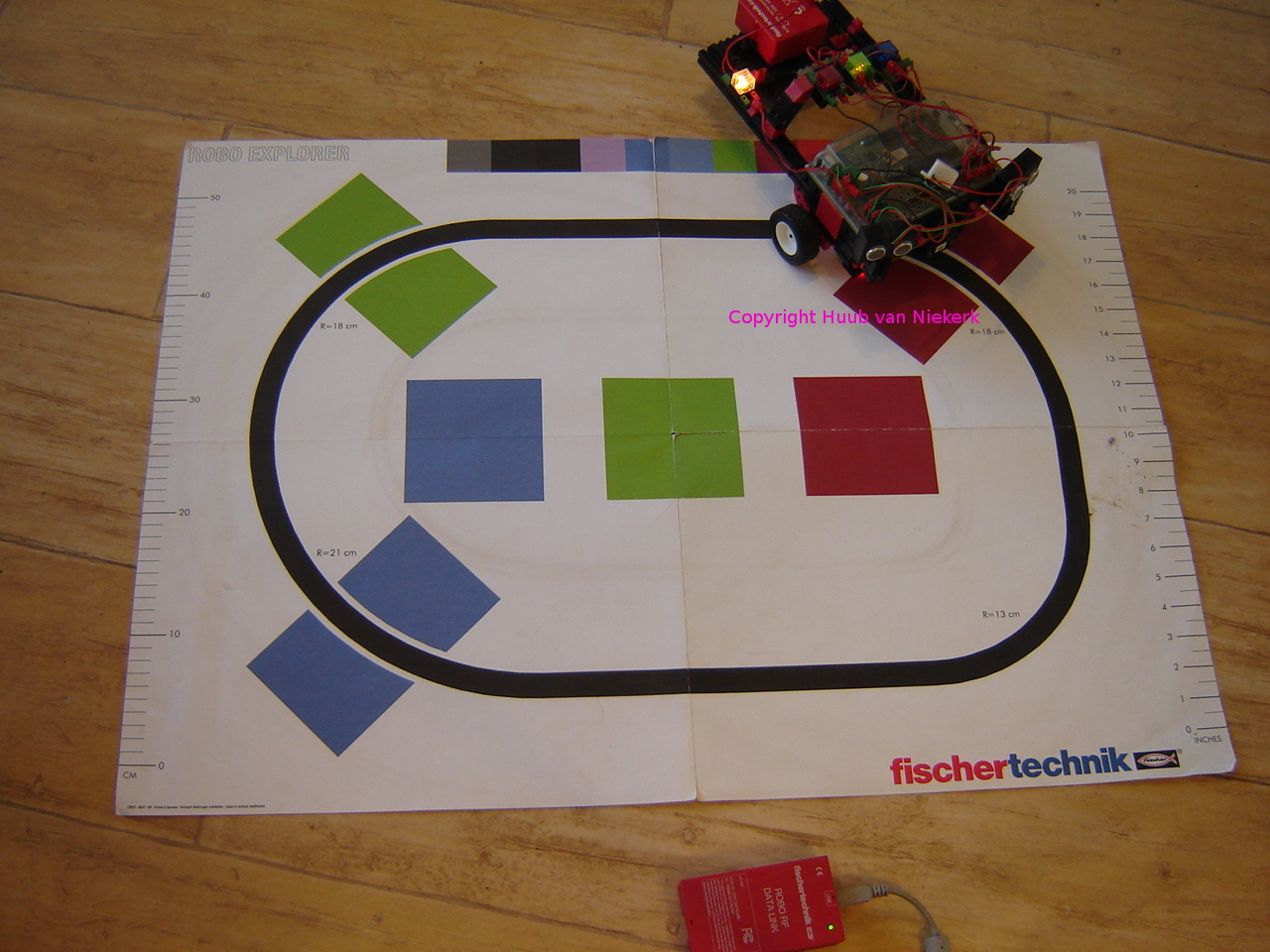
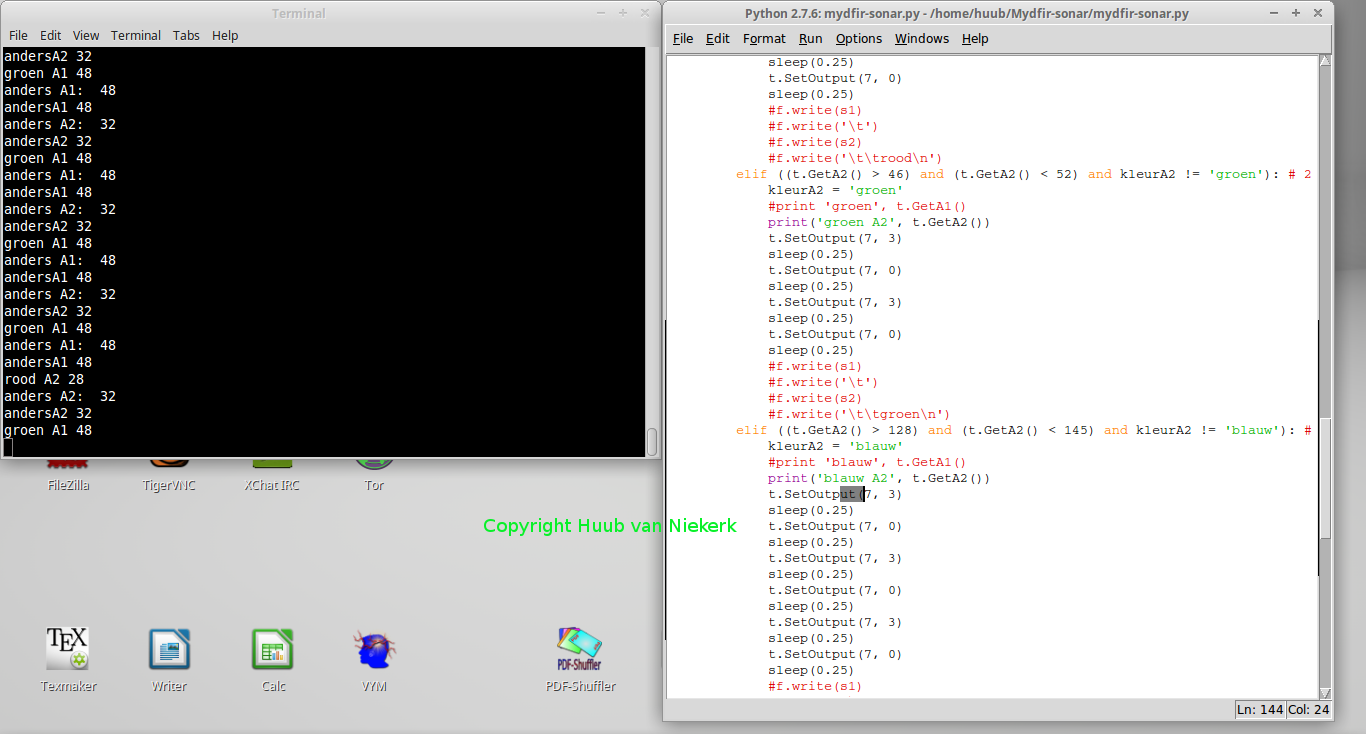
Discovery: Distances, sensors and turning: why does this go wrong? Another look into the code and some changes. The floortest gives some clues, but all? Click the first image to watch the video.
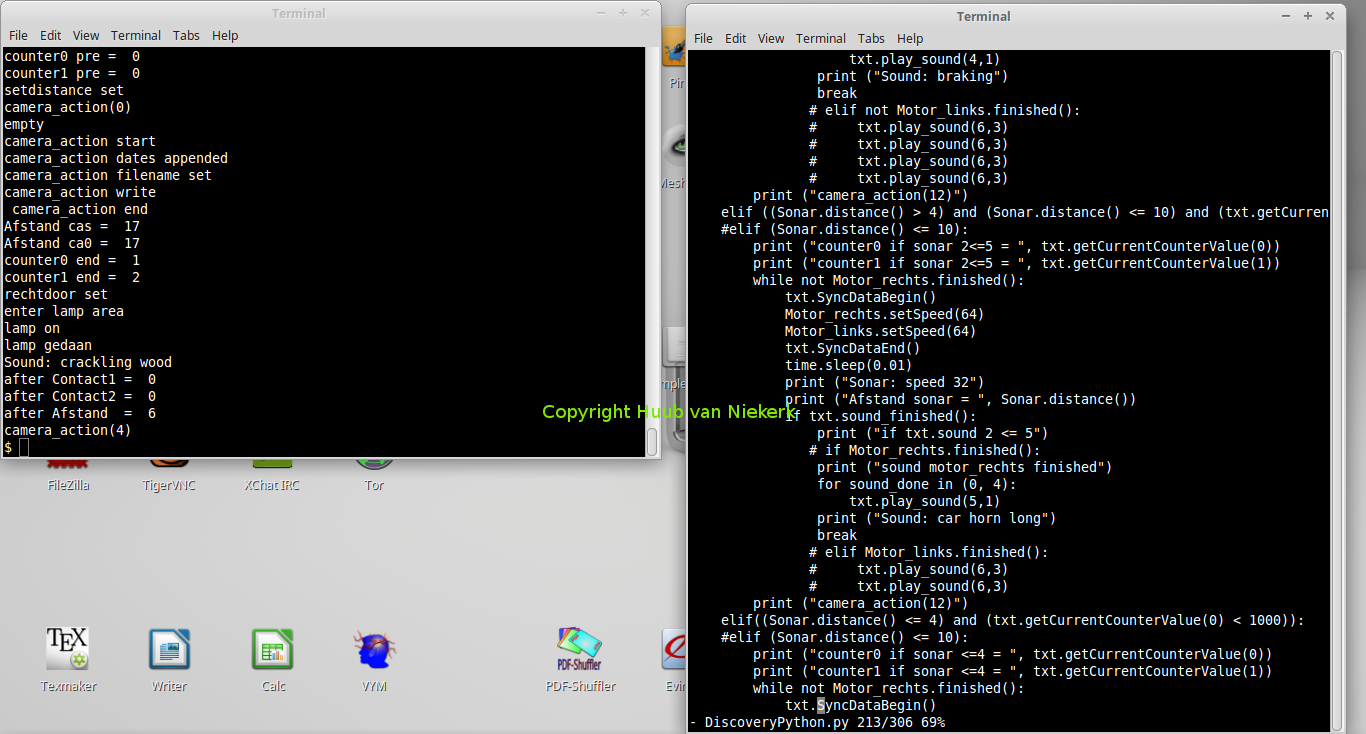
Arduino Yún: Finding the properties of the potmeter here, wiring wasn't hard. But: what next? Examining the code again, making improvements, an oops again, and something is working.... Click the first image to watch the video.
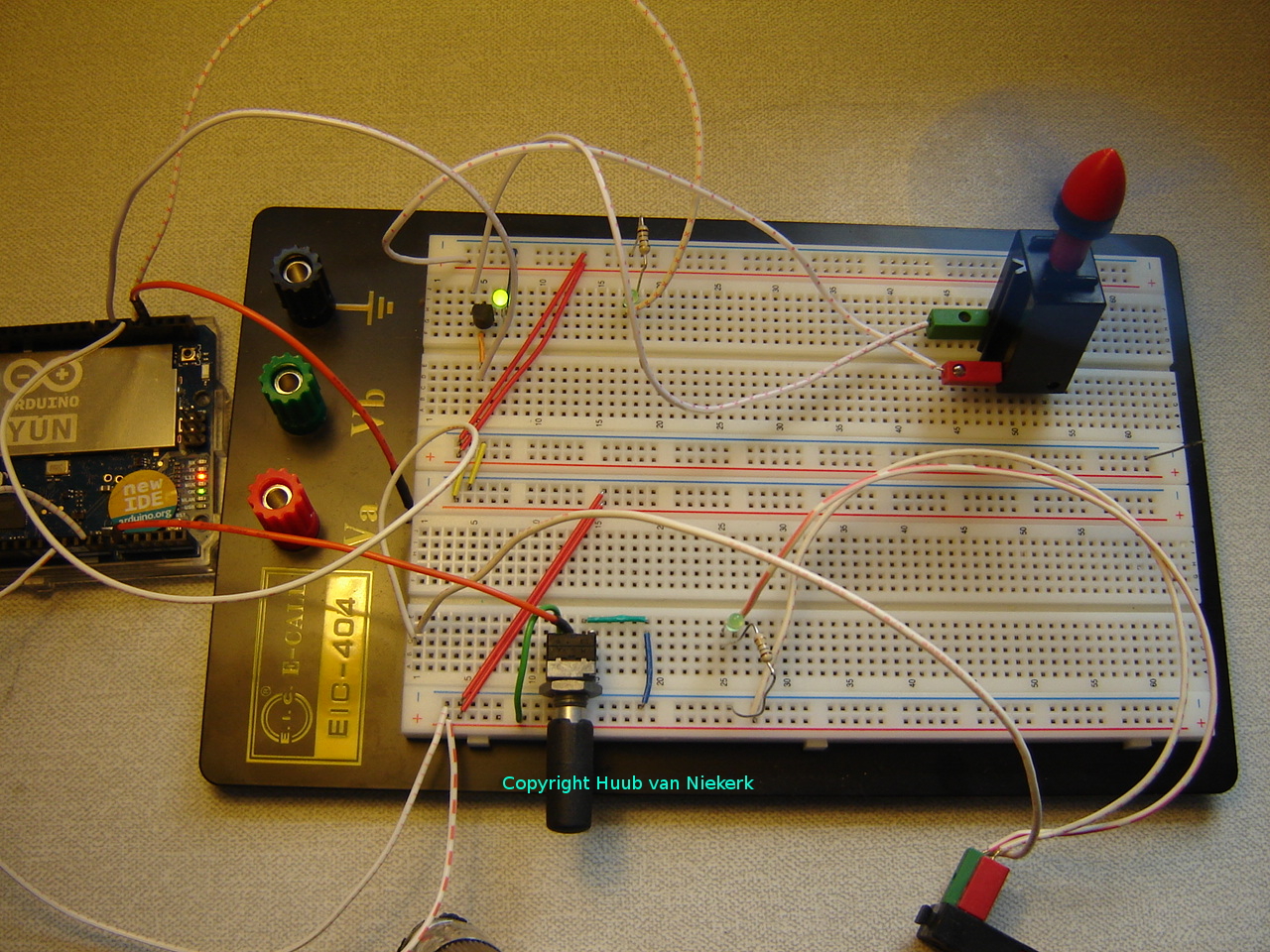
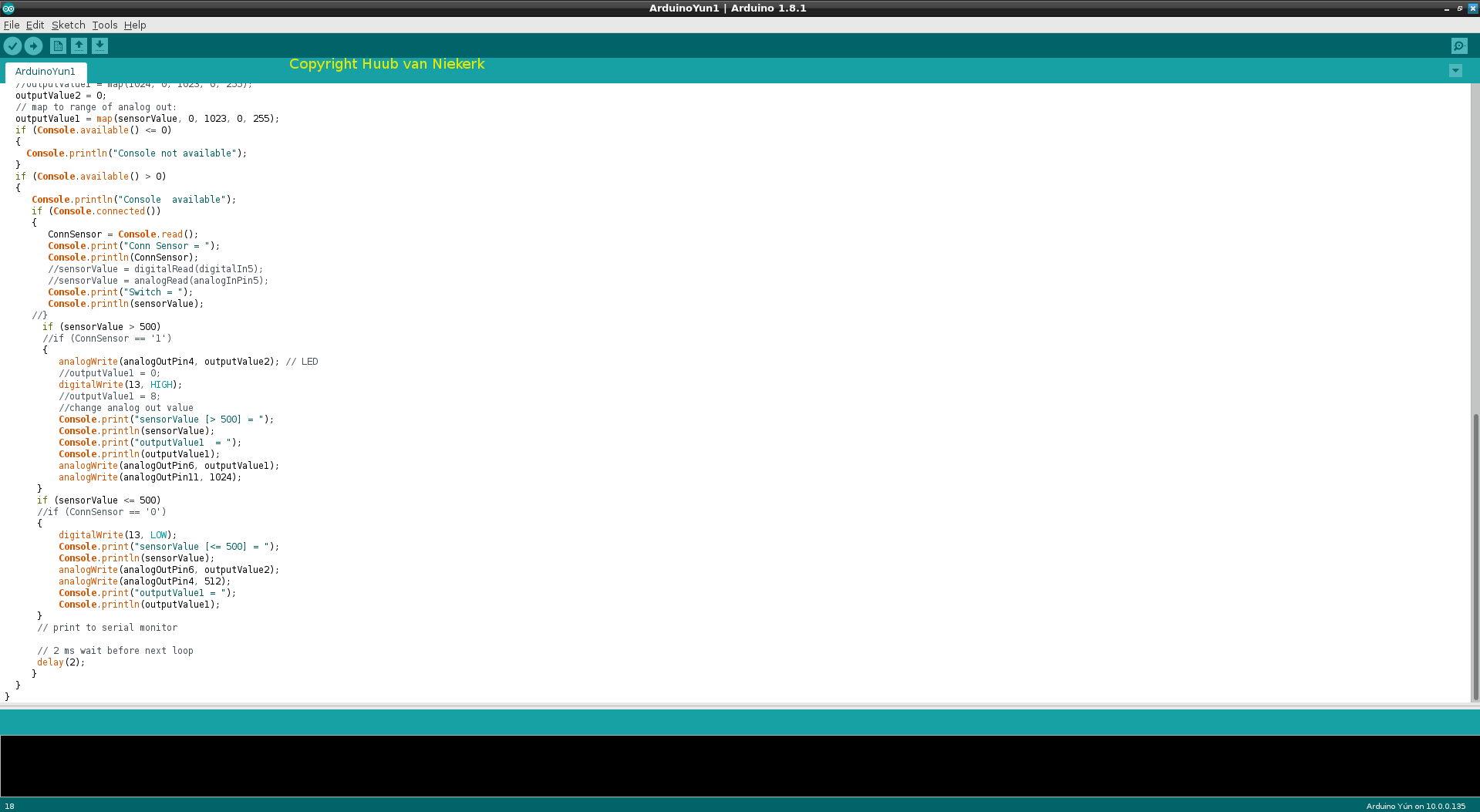
Mirft2: The front legs need a recosntruction but another solution is quicker and simpler for now. Will it pass the test ? Another reconstruction is necessary but how much does it improve the working? Questions arise...Click the image to watch the video.
RPi: Checking the motor again, there's inconsistent behaviour. Checking electronics solves a part, but measuring again raises questions. Back to programming: is there a solution? Click the image to watch the video.
Arduino Mega2560: The SPI code needs improvement, so using the examples I find out I made some mistakes followed by trial and error. But still... then the circuits: what about an LED which is ok but doesn't burn. Then 2 more LEDs fail. Sigh. Click the first image to watch the video.
Hand: Fingers need a fix, the arm pivot worm gear needs a small fix, the elbow needs a recontruction. While testing the fingers, there's an oops with air that ends with another likely reconstruction. Oops. Click the image to watch the video.
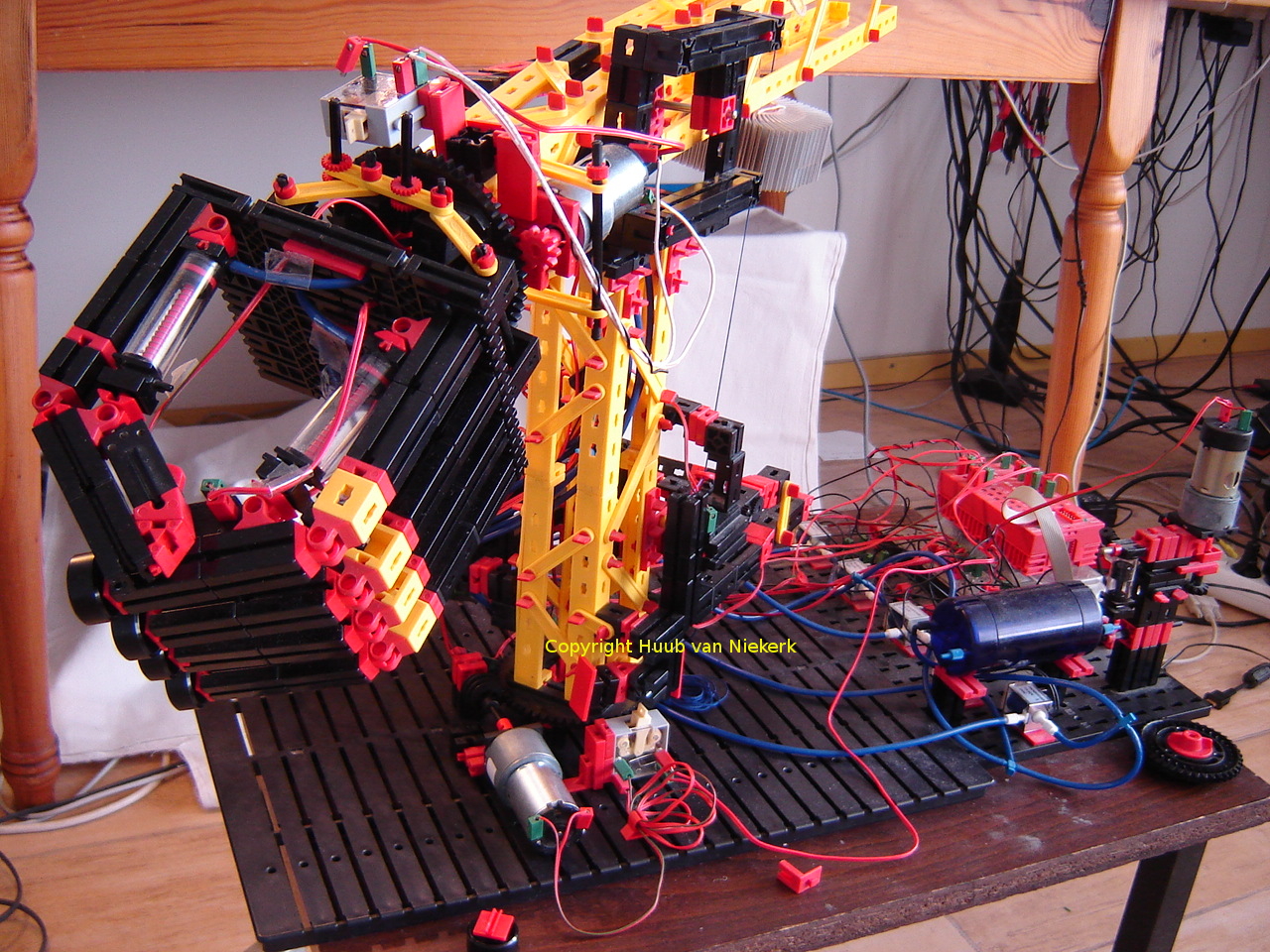
21 April
BB: Starting with a power oops, I also find strange results from the software. This leads to some screen output changes, but this doesn't explain if it was really a power oops. So what's really going on? Click the first image to watch the video.
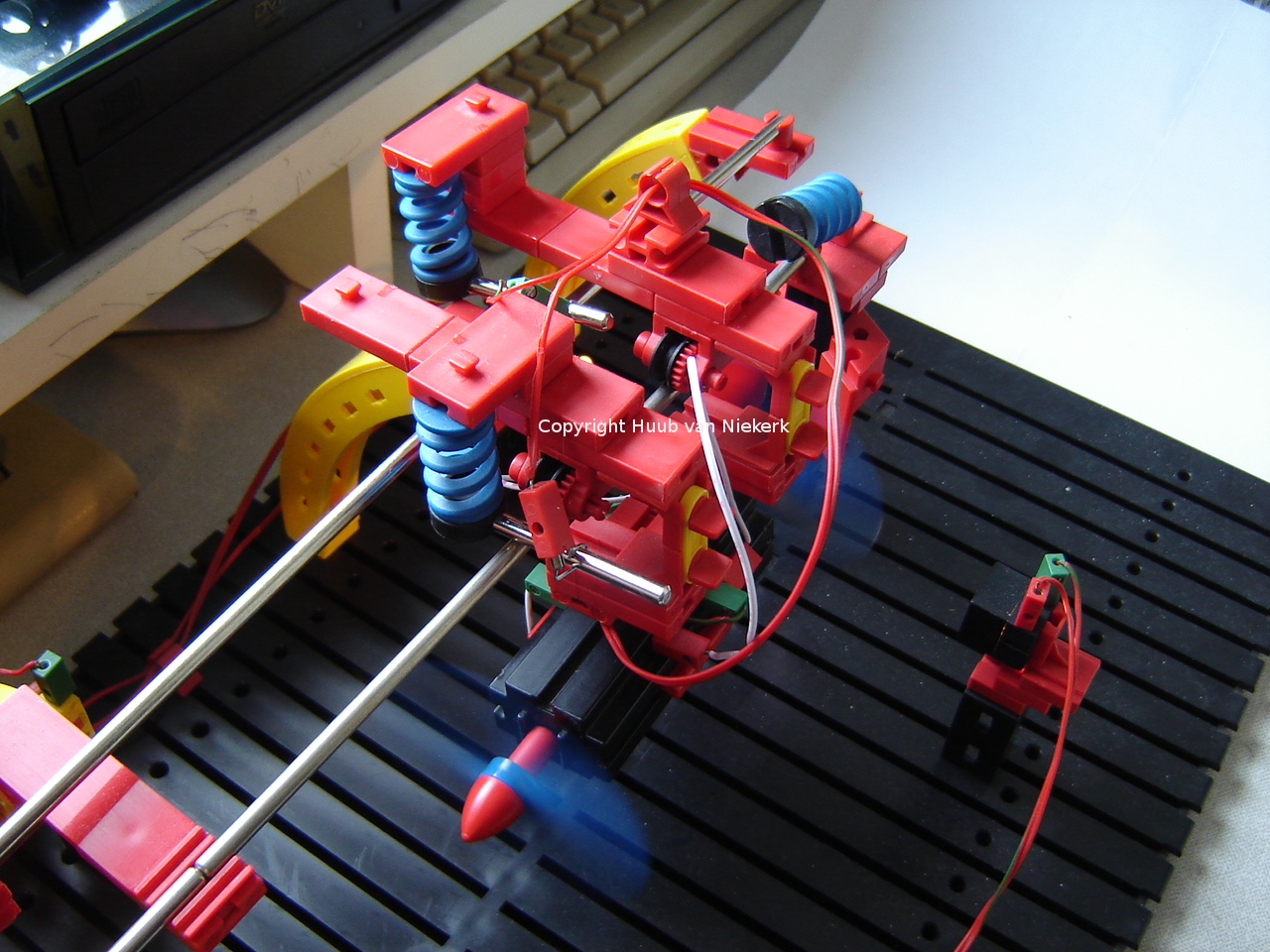
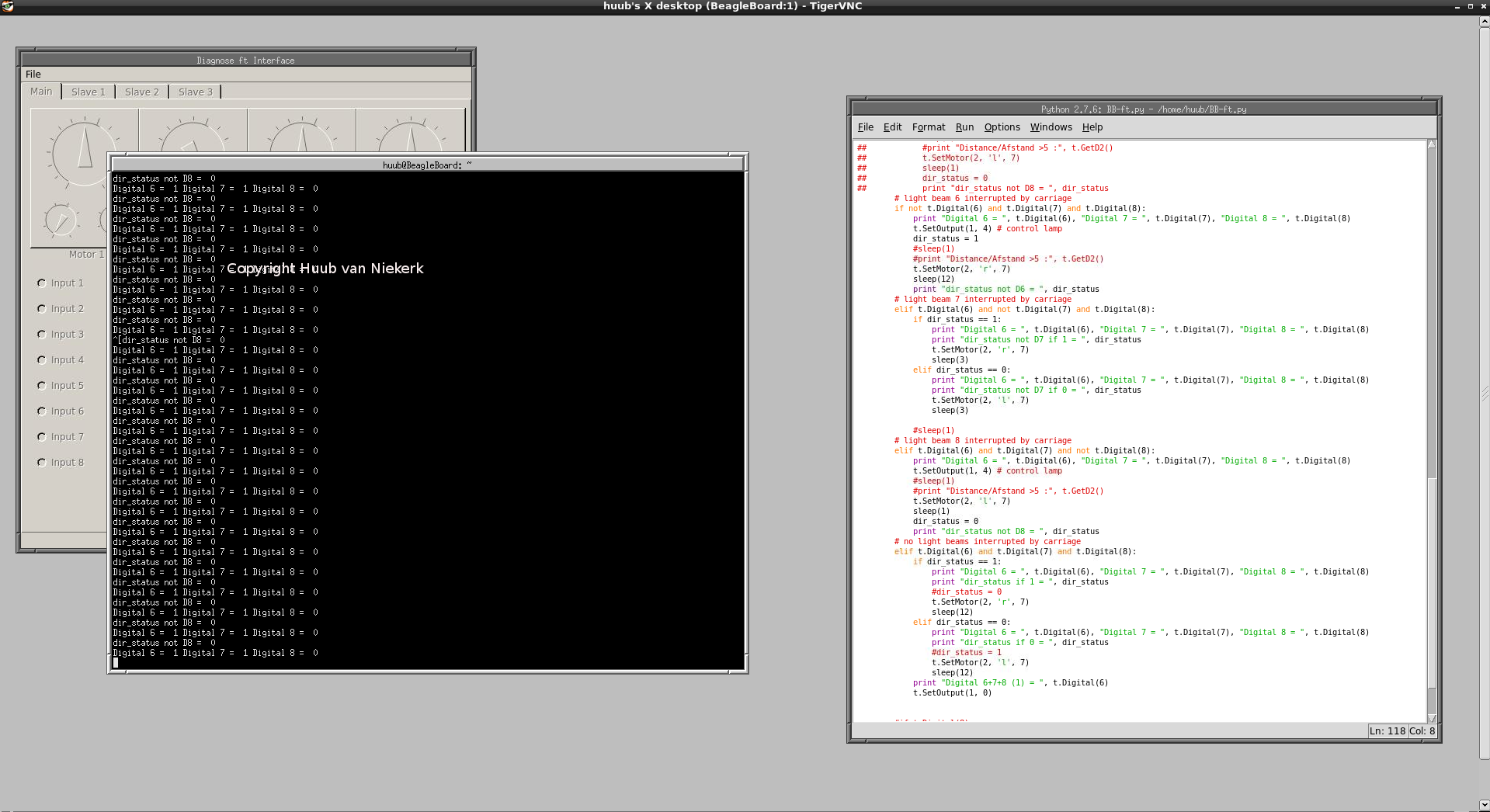
RPi2/ROS: Adding a light sensor (light sensitive transistor, actually) seems a nice idea. Needed: sensor, wires, some code. Oh, and some reasoning. Does the sensor work? How about the wiring? Click the image to watch the video.
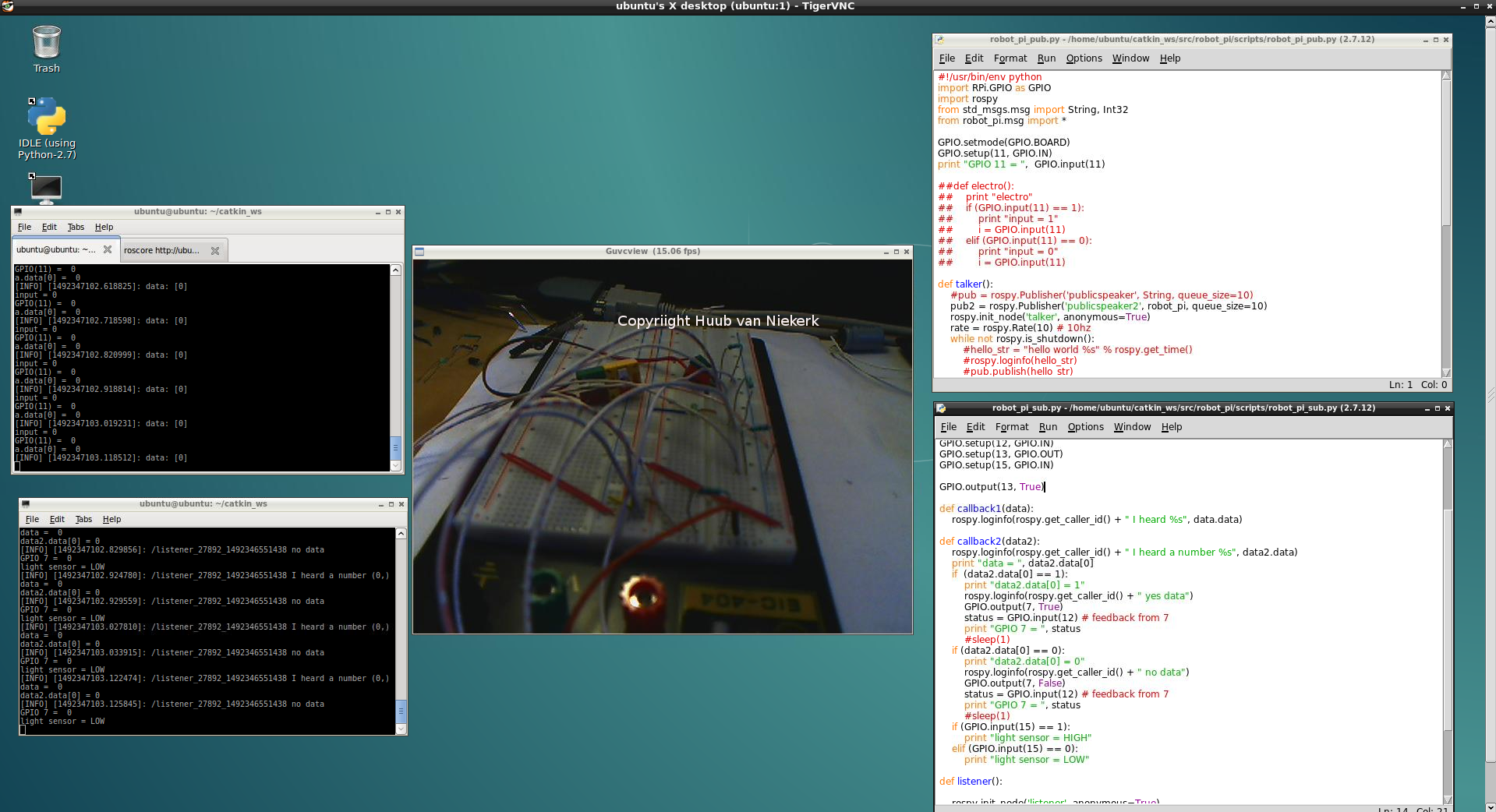
Mydfir: Now the sonar works again, but how about the motors? Diagnose seems ok, so another look at Python. This needs some changes, but where and how? Finally a clue pops up, but how to deal with it? Click the first image to watch the video.
Arduino Yún: The motor runs, sort of, but how. Some experiments and measurements are revealing but questions remain. Then adding some electronics to improve the circuit. Will it work? Click the first image to watch the video
Mirft2: The right-side frontleg has a problem, but how to fix it? Then gear problems show up again, and a cause is found. Then some tests: it works, kind of. But the things that need fix are accumulating, sigh. Click the first image to watch the video.
RPi: First, the software pwm doesn't work. Testing software and hardware reveals more than 1 cause. Then the hardware pwm...this is still not as it should be. But why? Click the image to watch the video.
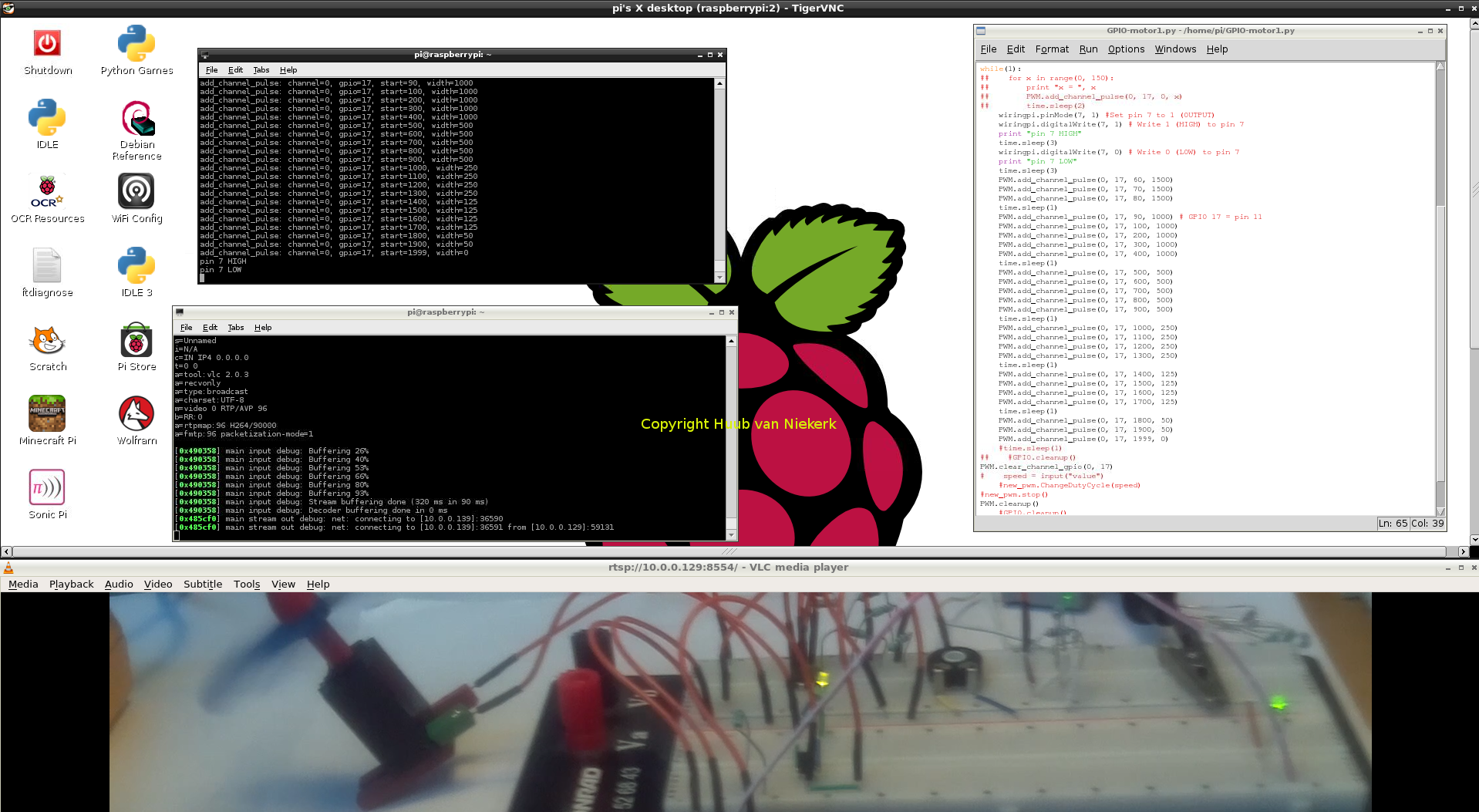
Arduino Mega2560: First: why does 1 motor not run? After make the code equal for both, it still takes some manual assistance. But why? Then, SPI. Checking code and trying out: what happens and why? Click the first image to watch the video.
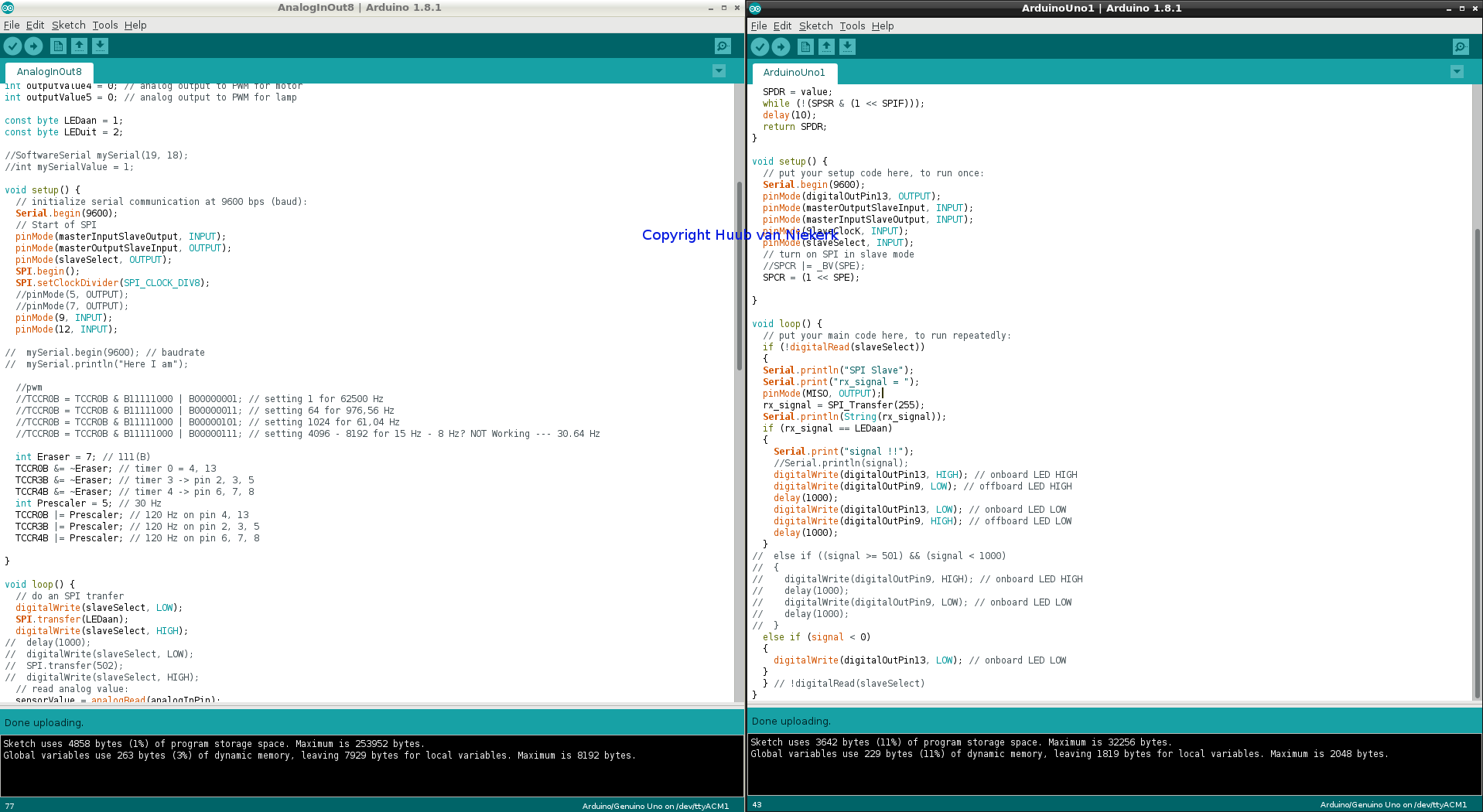
Hand: The arm needs a fix, but what does it take? Can it be fixed anyway? Then, the hand: a few things go wrong when the index finger and thumb are involved. But how to fix it? Click the first image to watch the video.
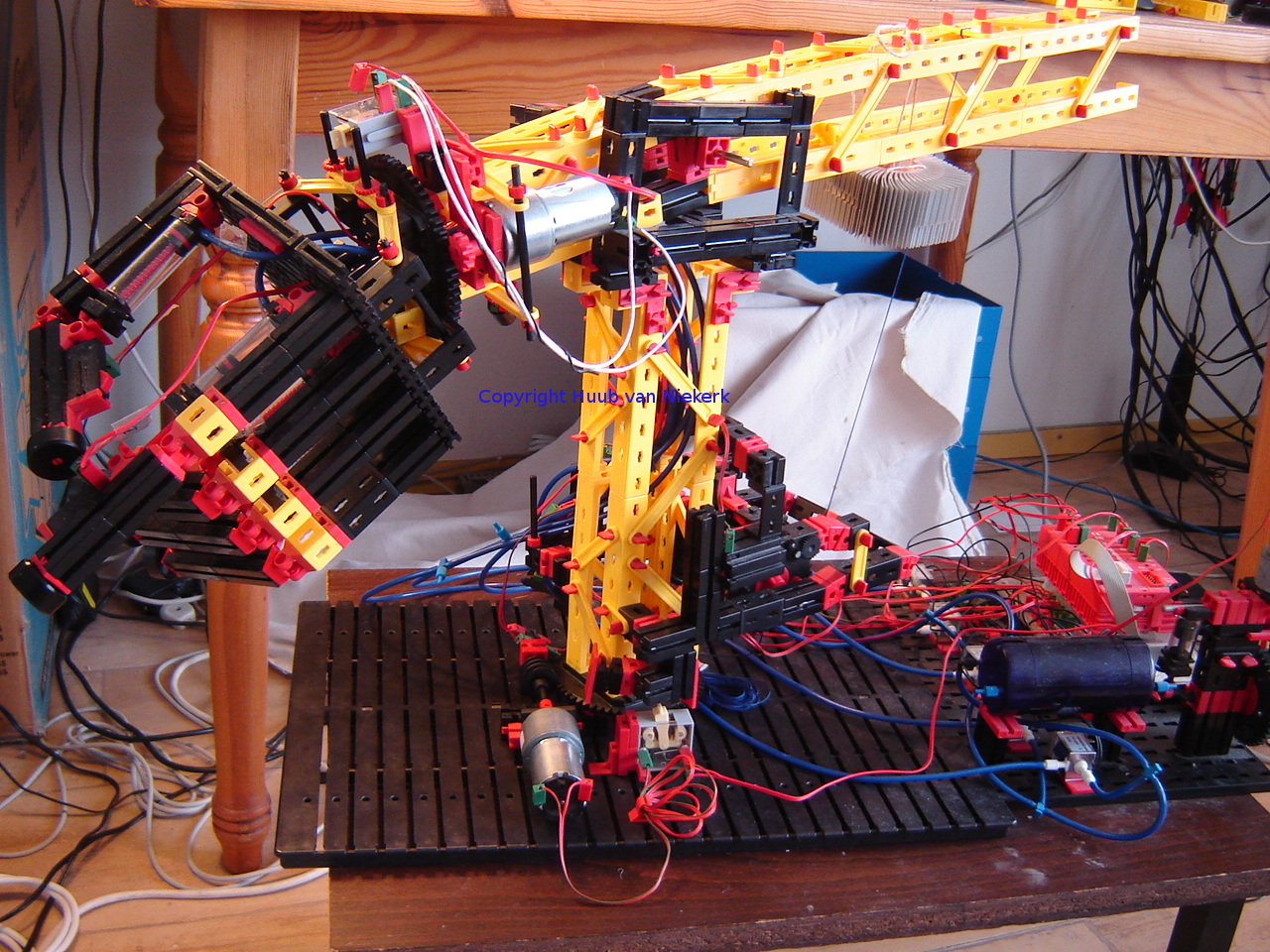
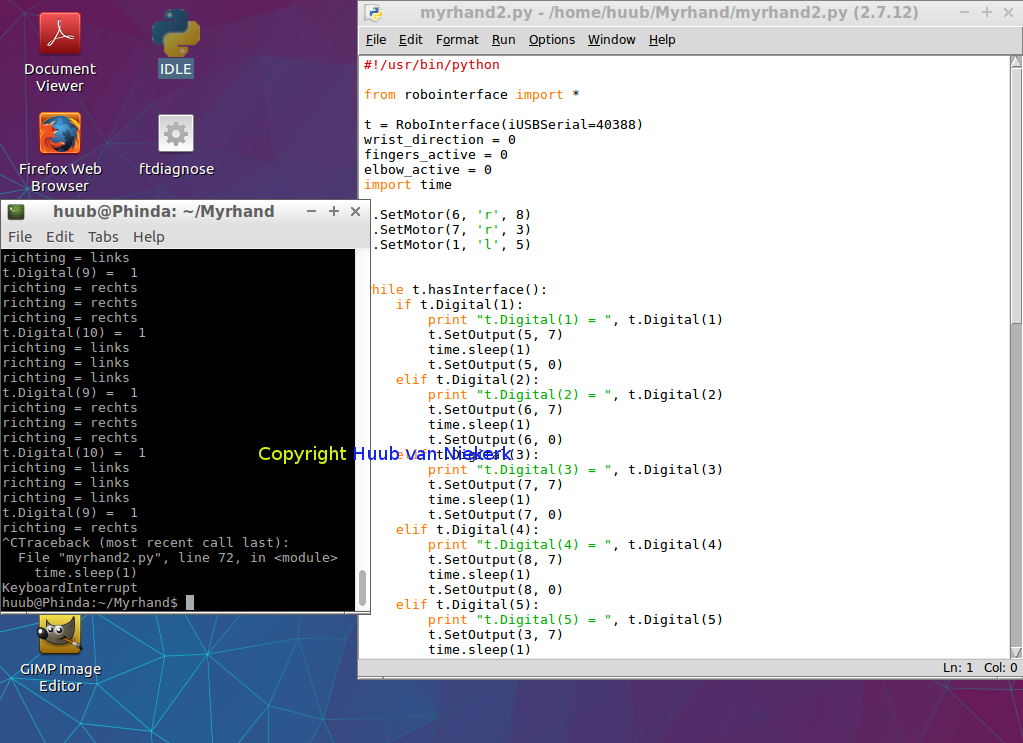
14 April
BB: Time a little less weight and spring change. Then an oops. Also, weight can be less when it's spread. Does this work? The rods really need to be replaced. Click the first image to watch the video.
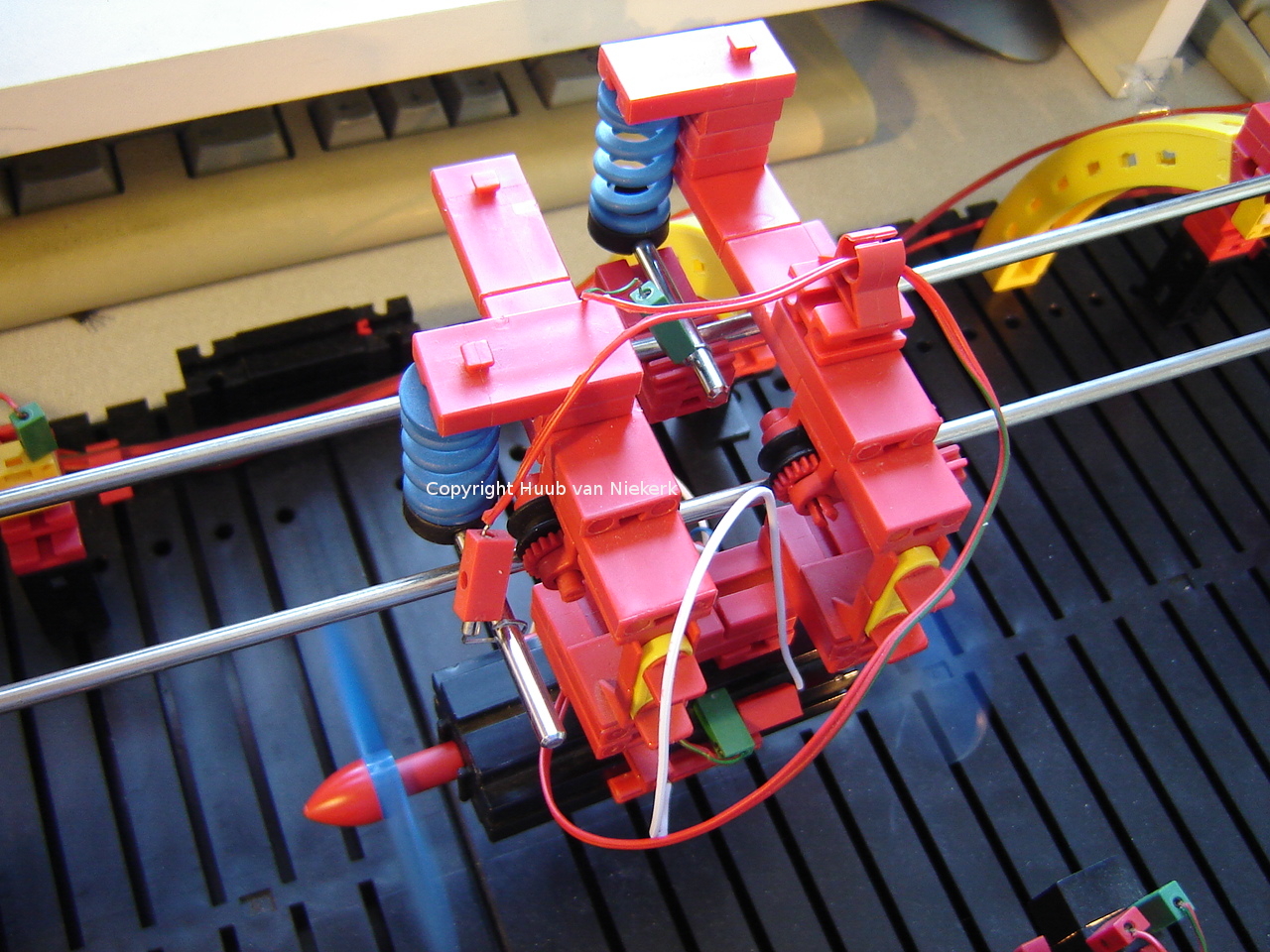
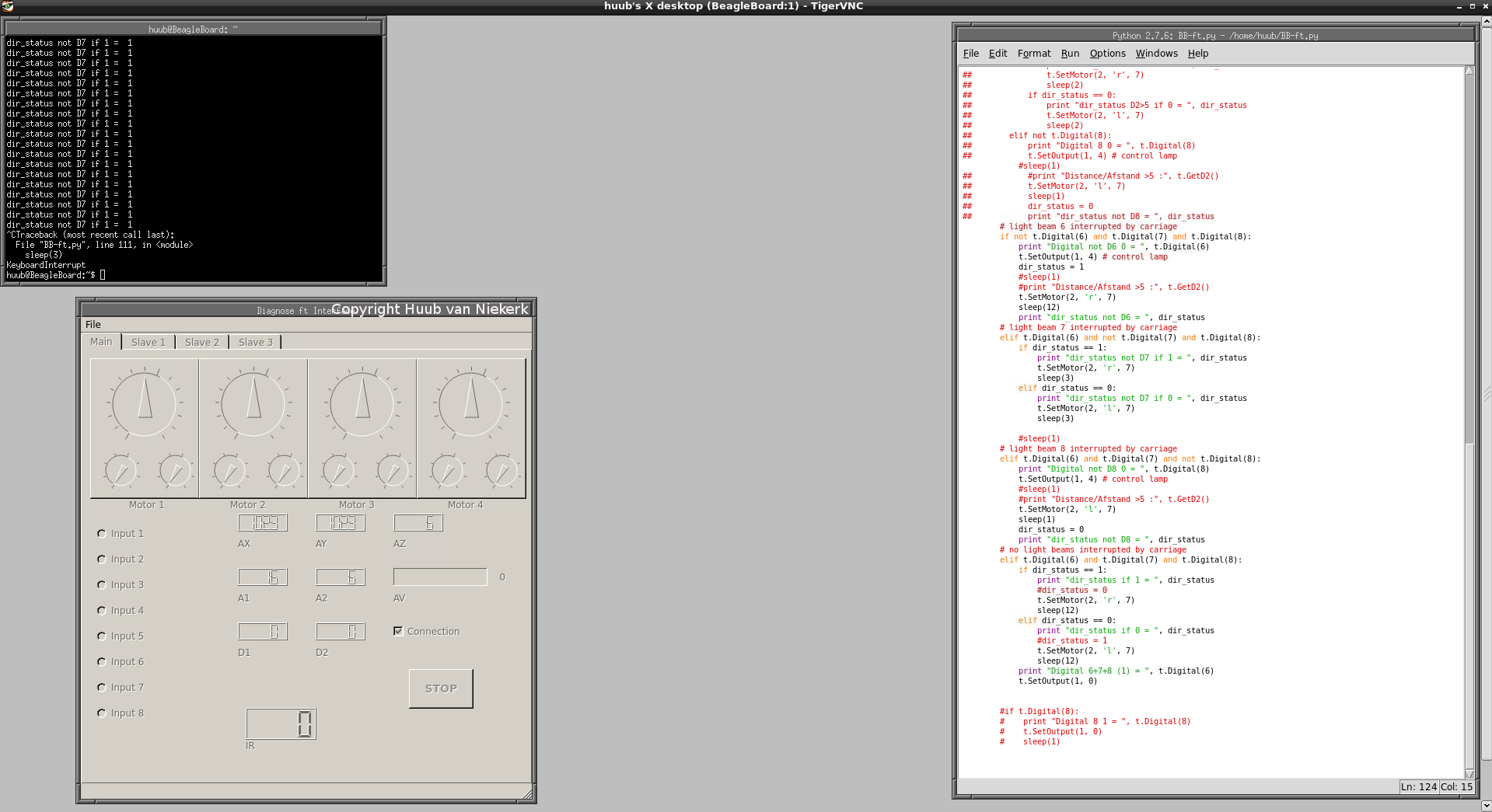
RPi2/ROS: No camera, only LEDs. But why doesn't it work? Checking ROS messaging shows it should work. Some code checking reveals a culprit, and measuring electronics shows another. Will it work? Click the image to watch the video.
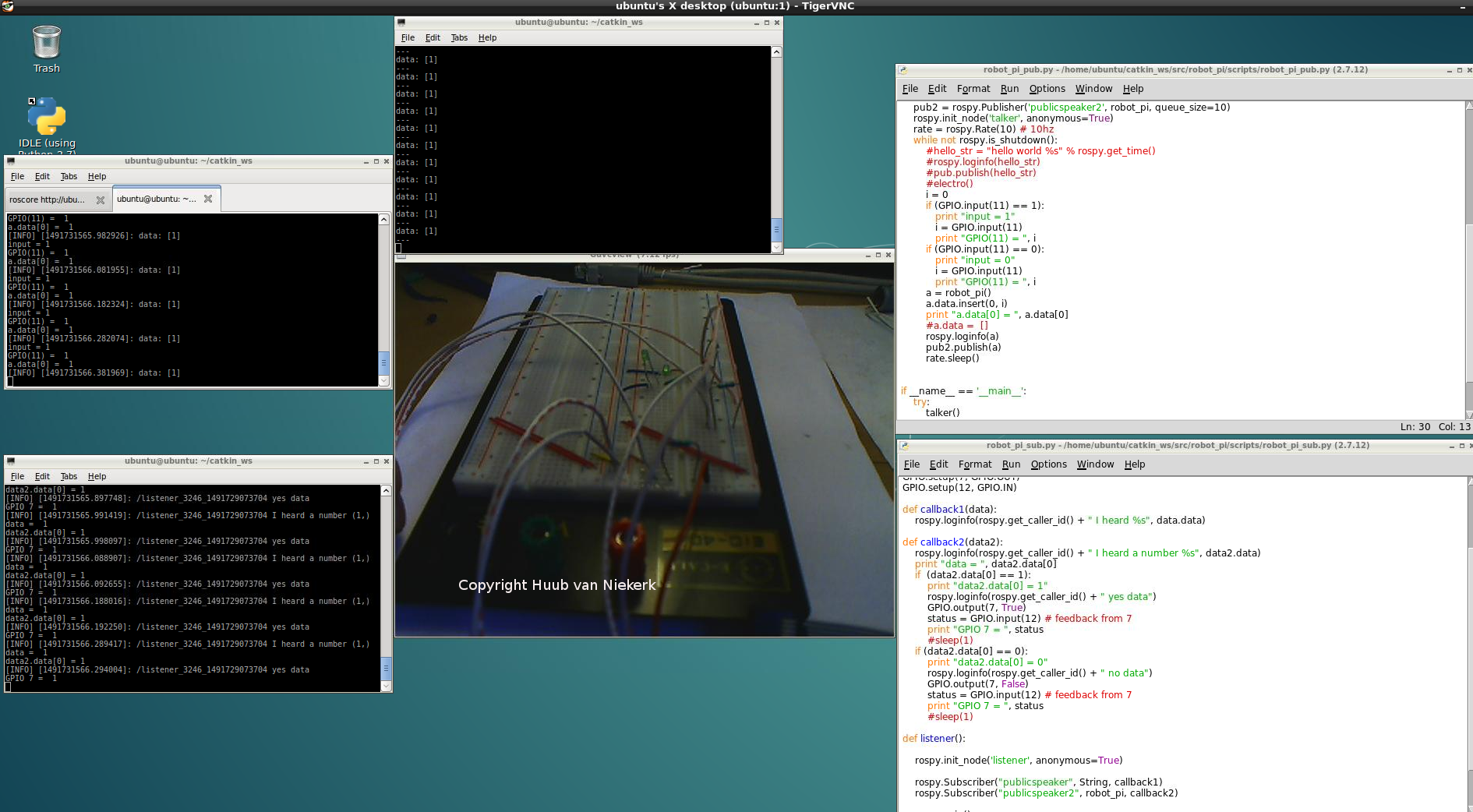
Mydfir: Rewrite print commands and what's with the buzzer? Then, why doesn't the sonar respond anymore? Time to enable screen output and check the wiring. Will it work? Again, a lot of weird stuff. Click the first image to watch the video.
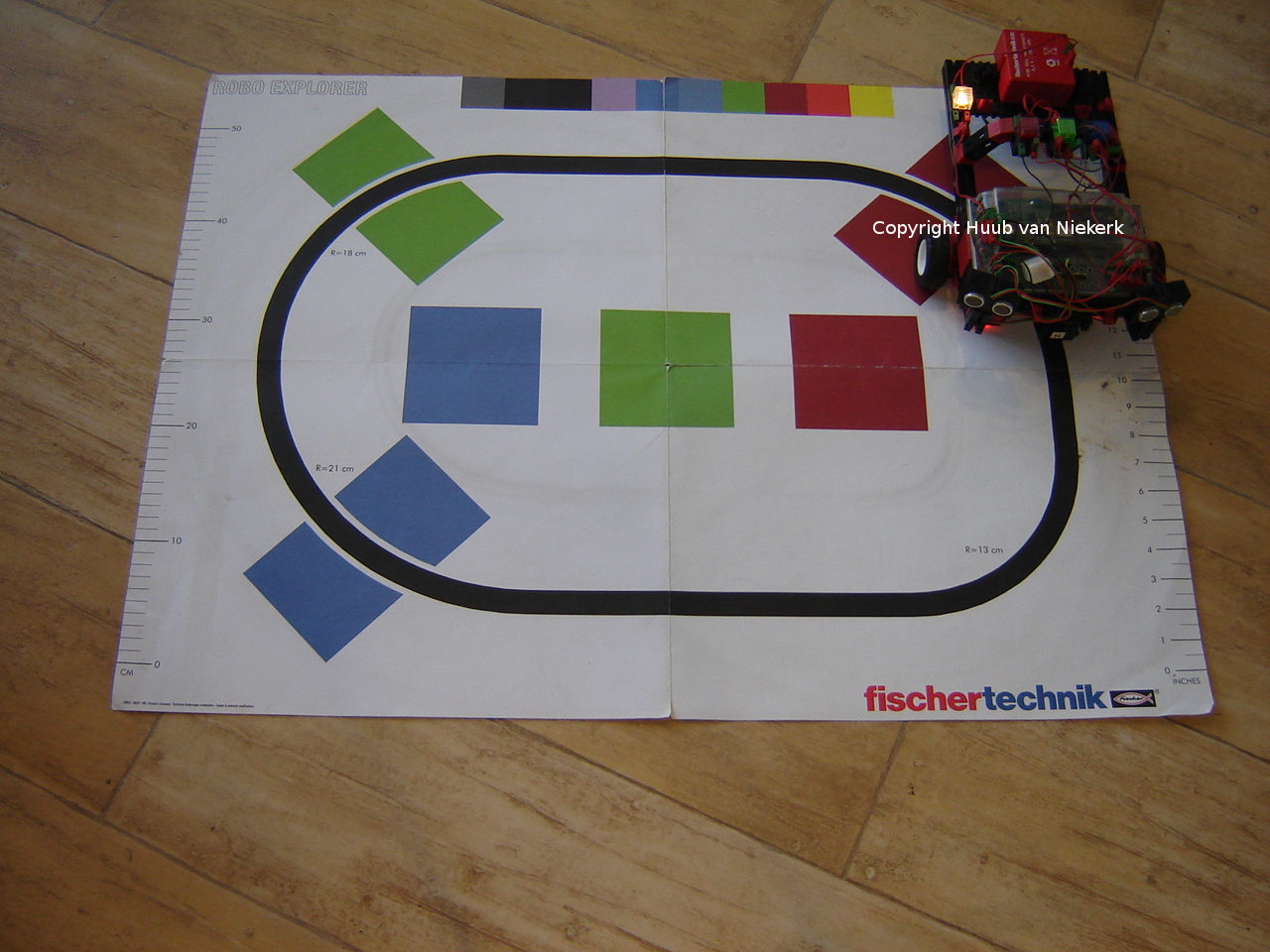
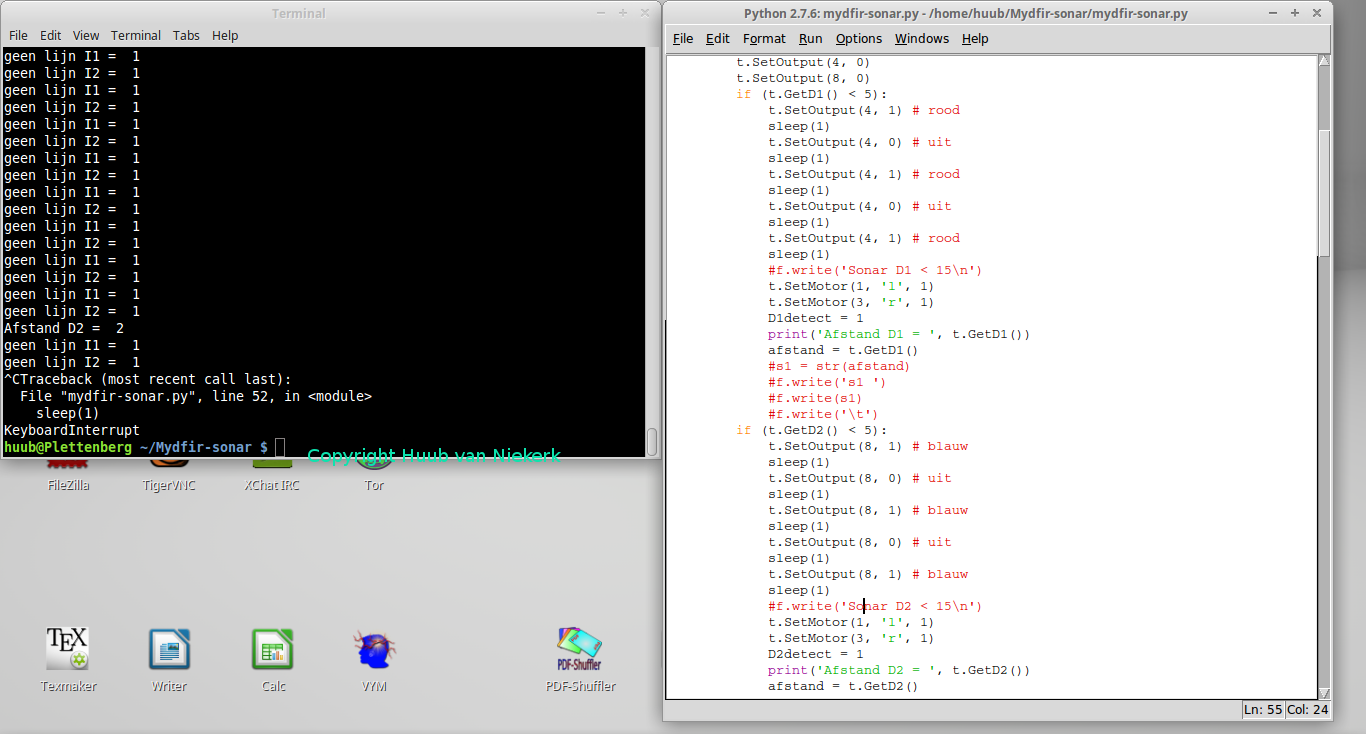
Discovery: Changing the print commands ends with an oops. Then: what's the result? What's the difference between the firmwares? Then time for a floortest: will it finally go ok? Click the image to watch the video.

Arduino Yún: Big oops last time, so will it work now? Some changes and oops (I did it again?). Change some electronics and some success... but why? How? Click the first image to watch the video.
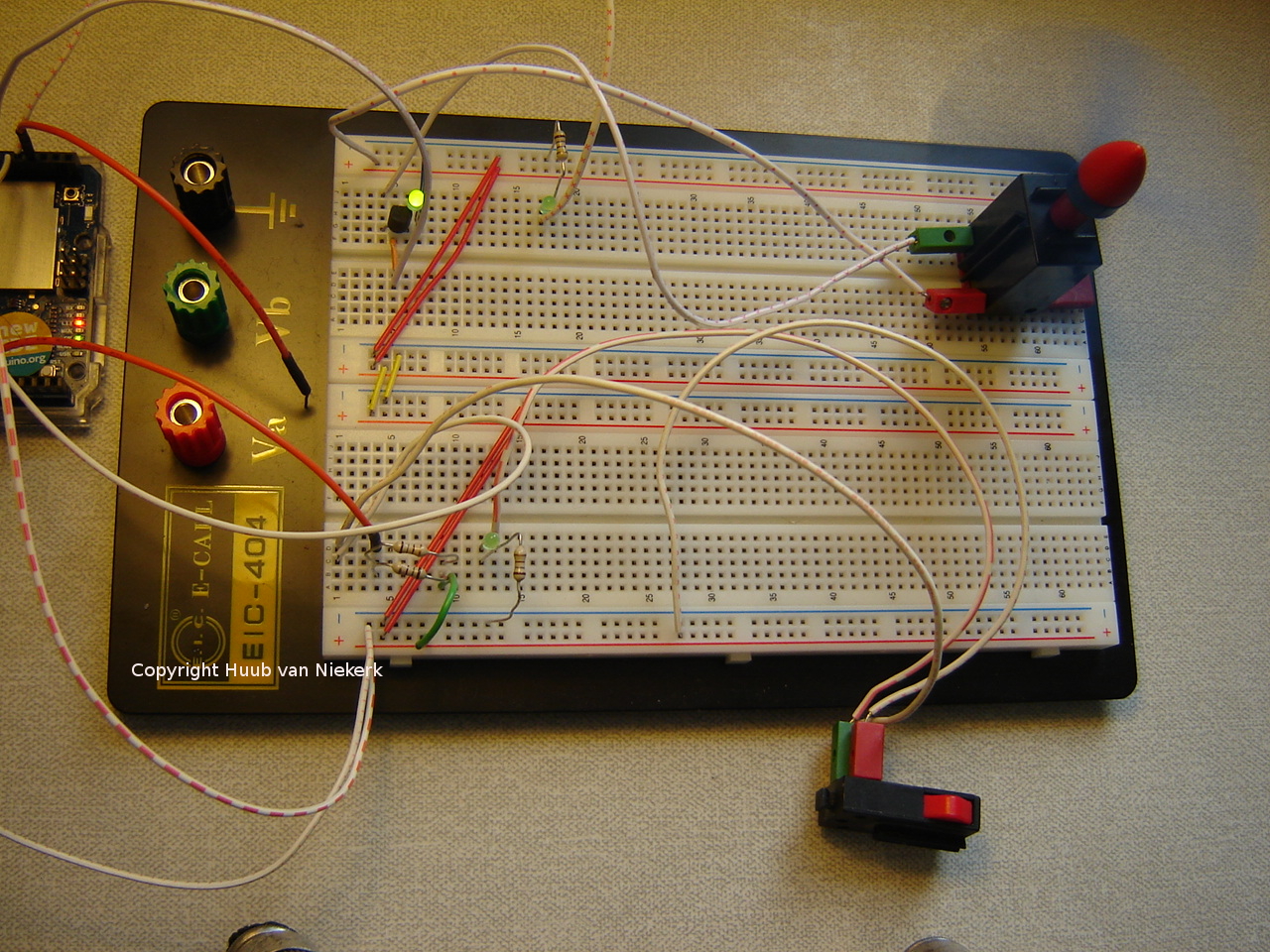
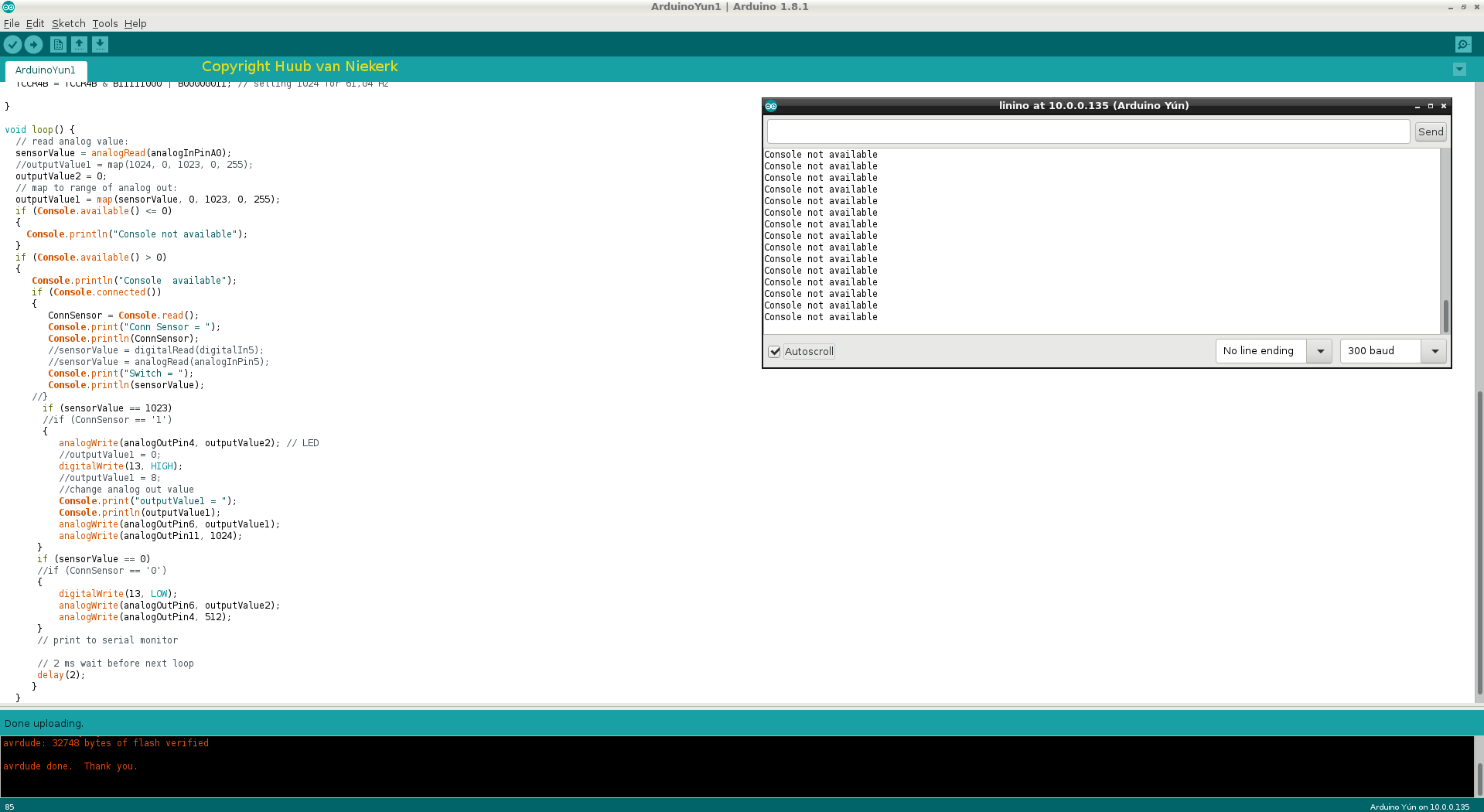
Mirft2: Checking & thinking about feet, then using Android to add some missing code. Over to the other firmware: some oopses. Why do they go wrong?! Click the first image to watch the video.
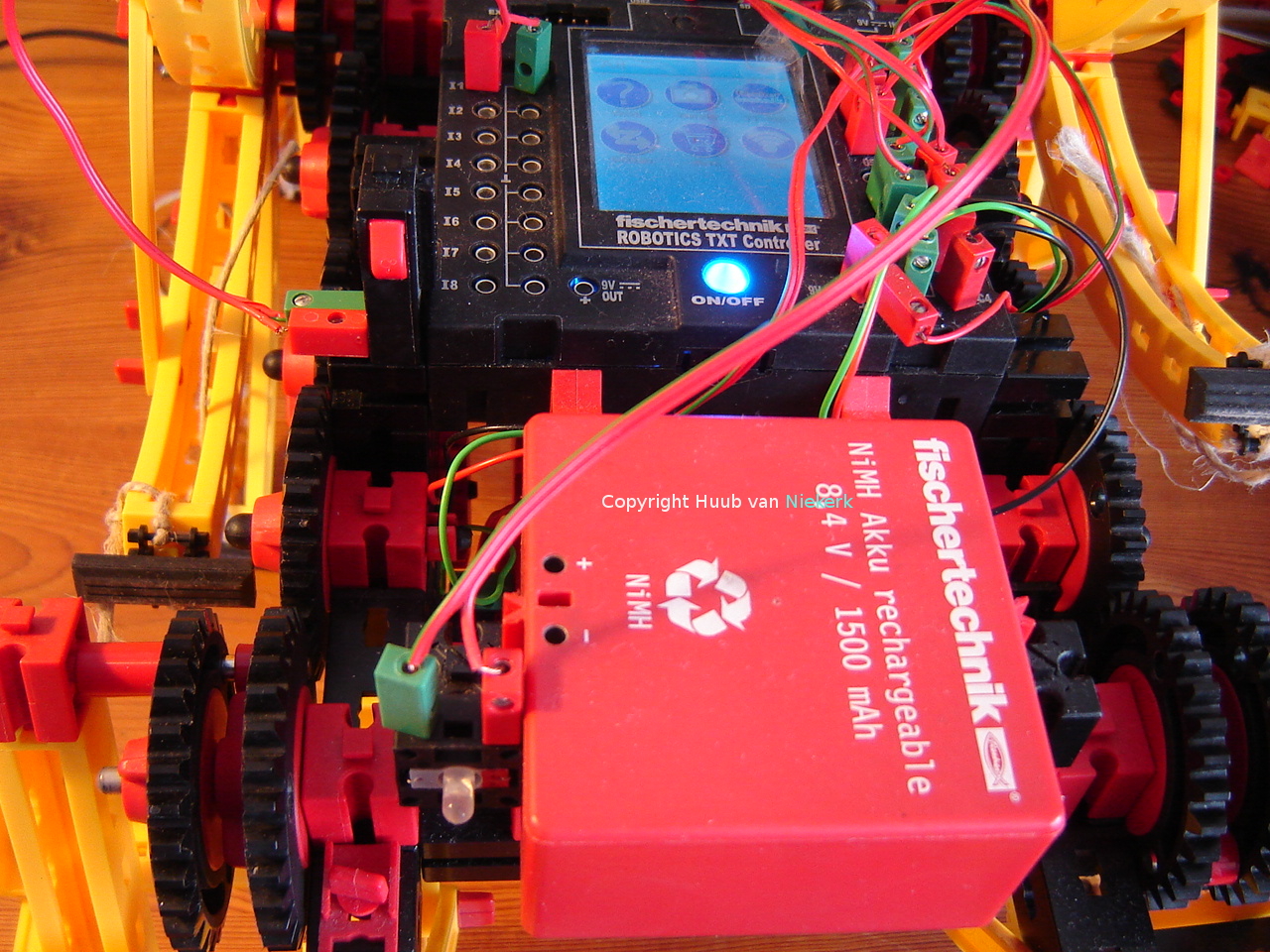
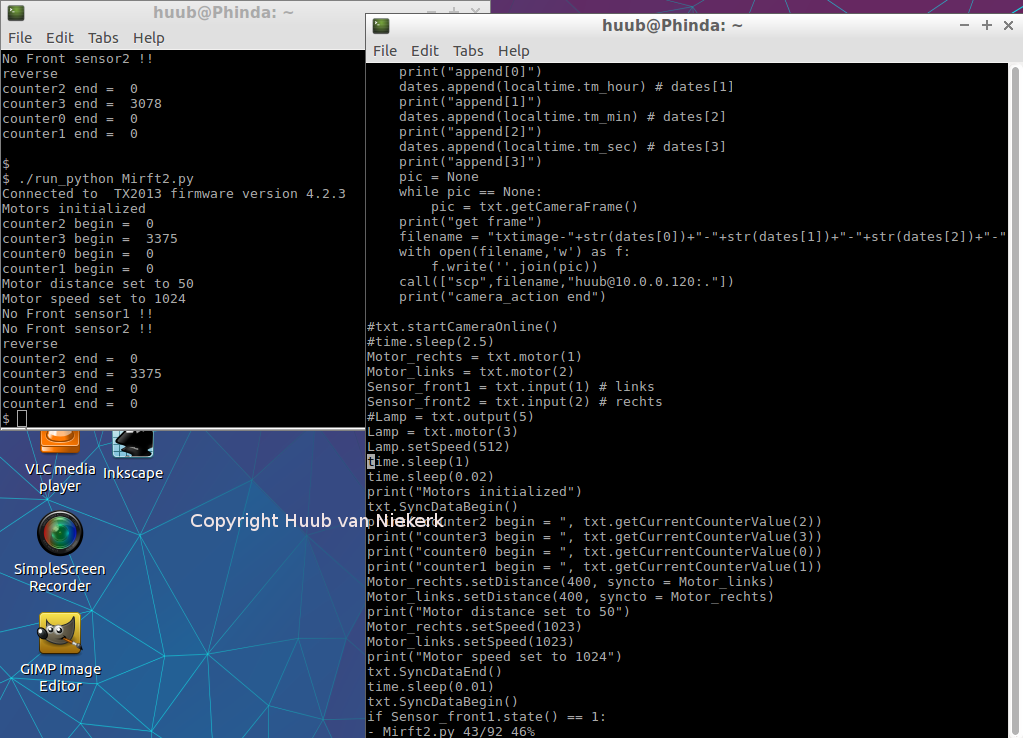
RPi: Trying PWM and looking at the code, it's time to try another approach: rewire and mix with software (wiringpi) pwm. But how? Click the image to watch the video.
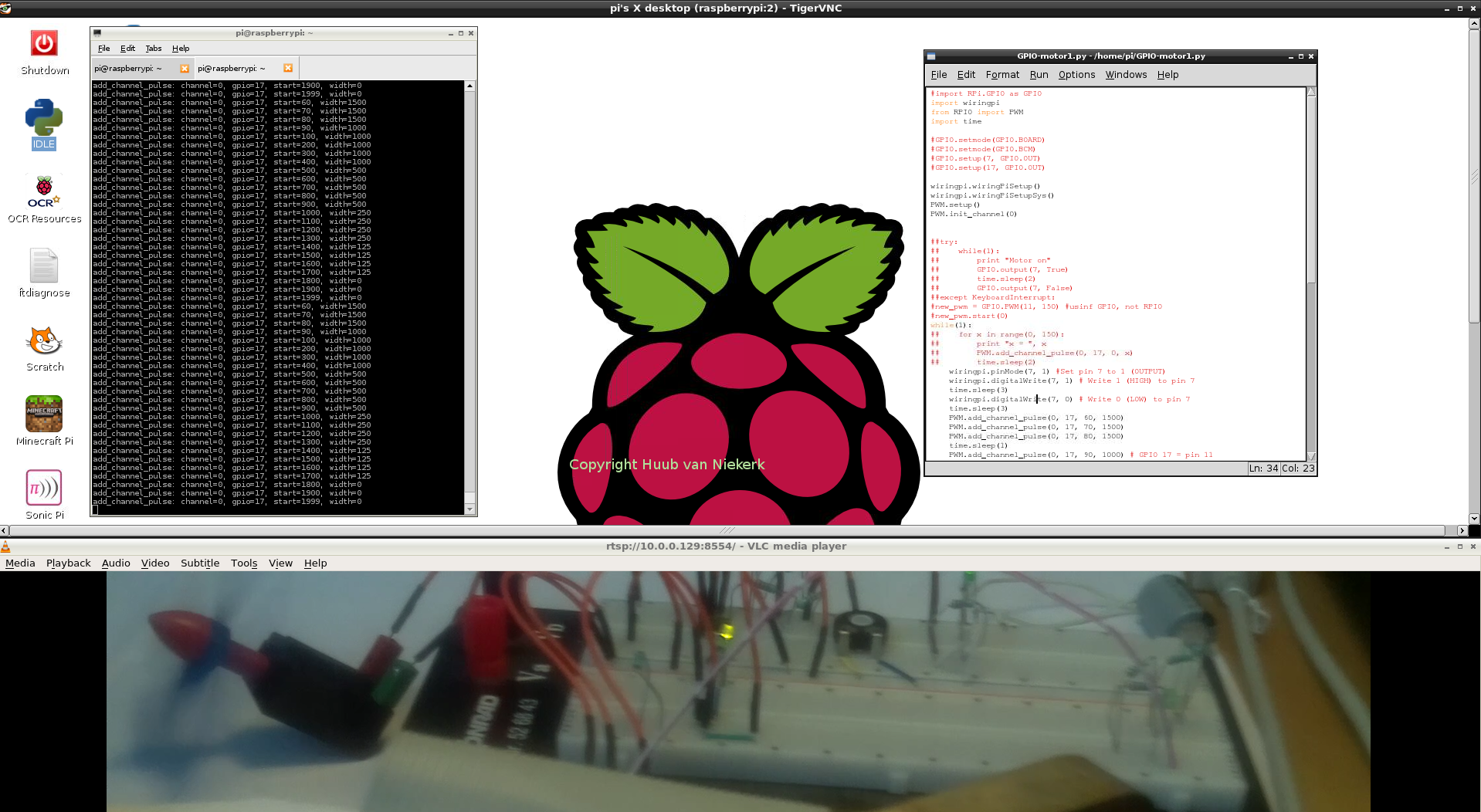
Mega2560: The SPI code obviously needs improvement and after finding an example here, it shows what is needed. But will it work? Then, back to electronics: 1 motor doesn't do anything but isn't broken. Why does it stand still? Click the first image to watch the video.
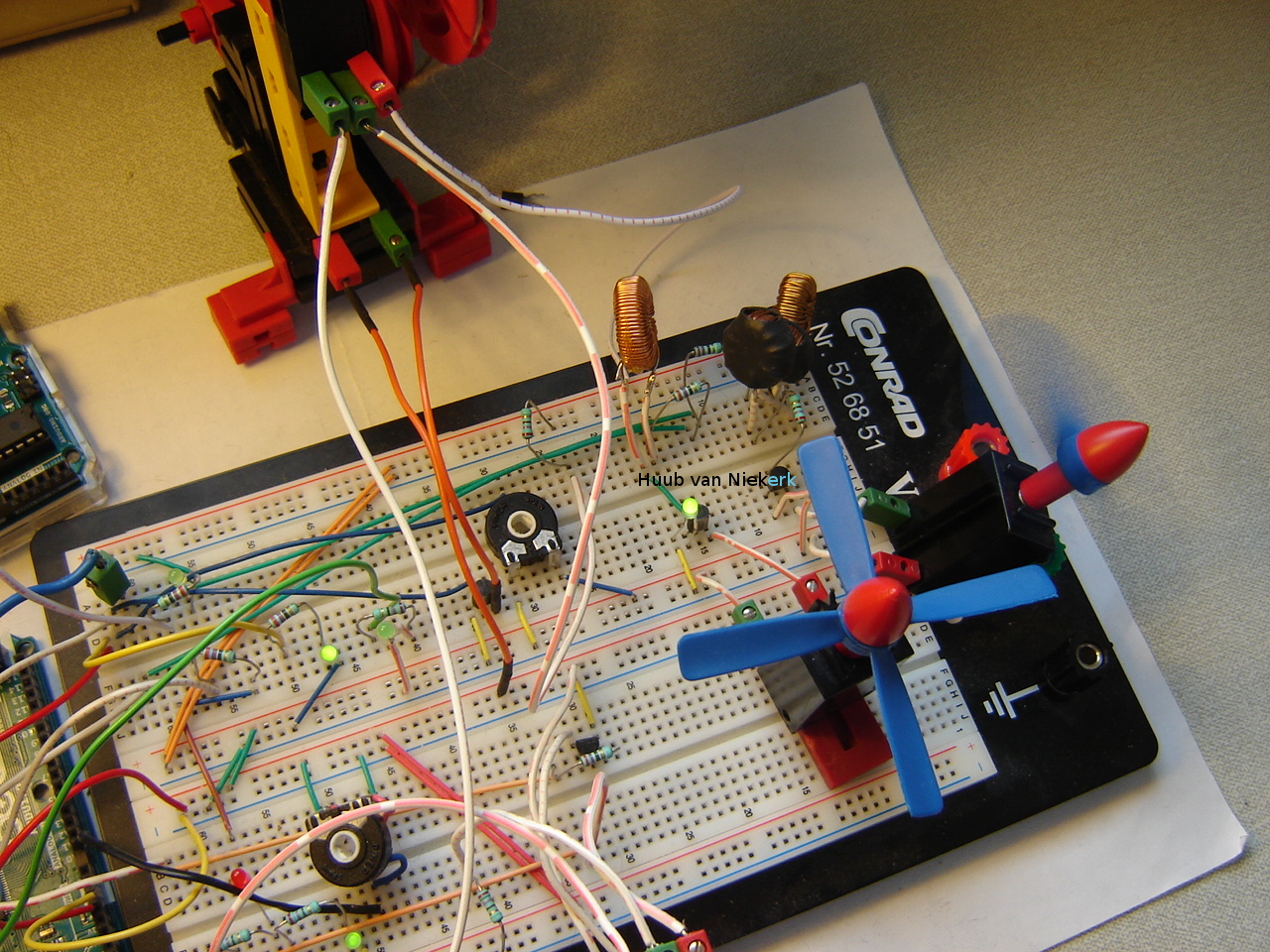
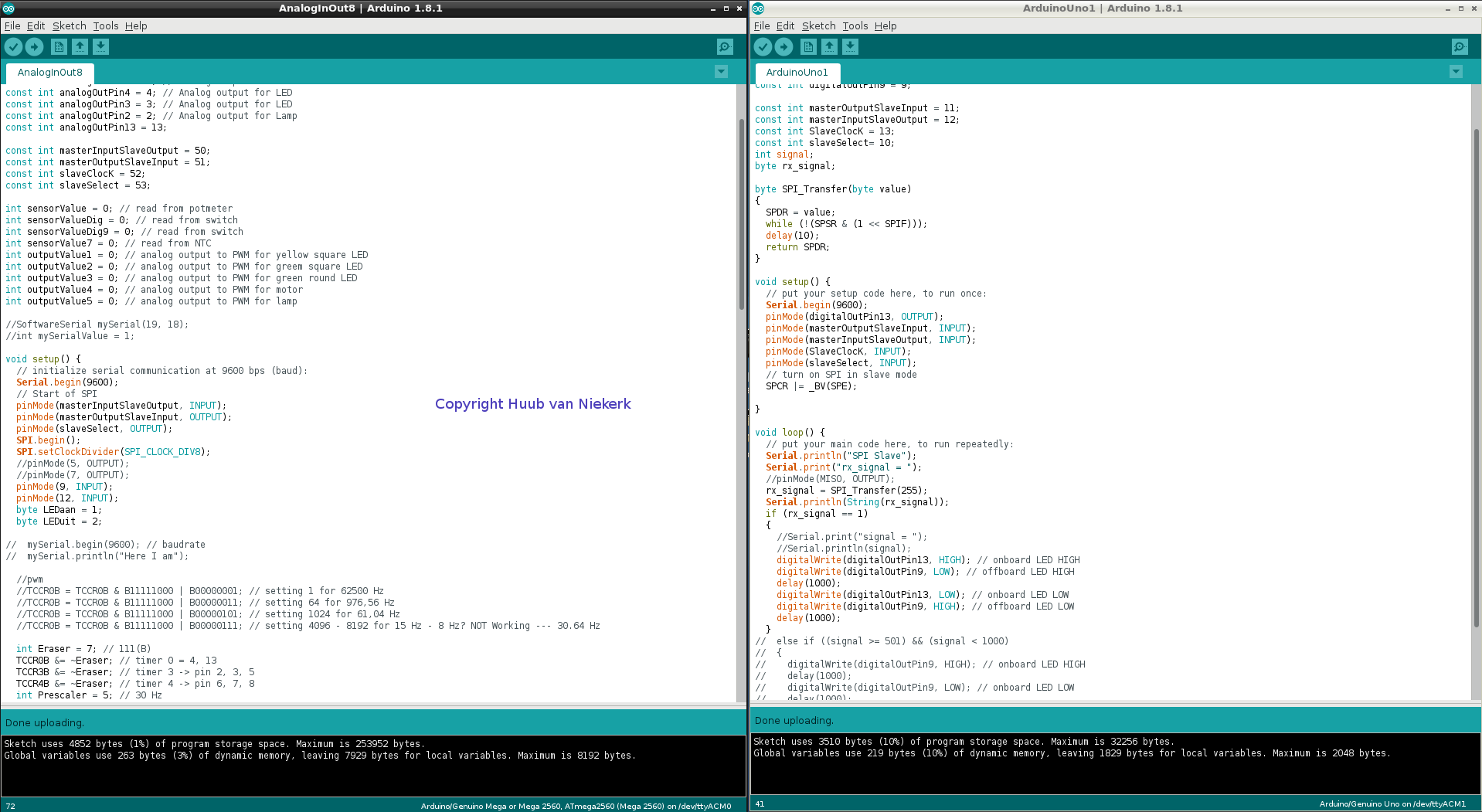
Hand: Finish the compressor motor code, then the arm pivot motor needs some attention. Also, can I improve the wrist pivot motor? Then, the arm isn't quite as it should be, but how can I improve it? Click the first image to watch the video.
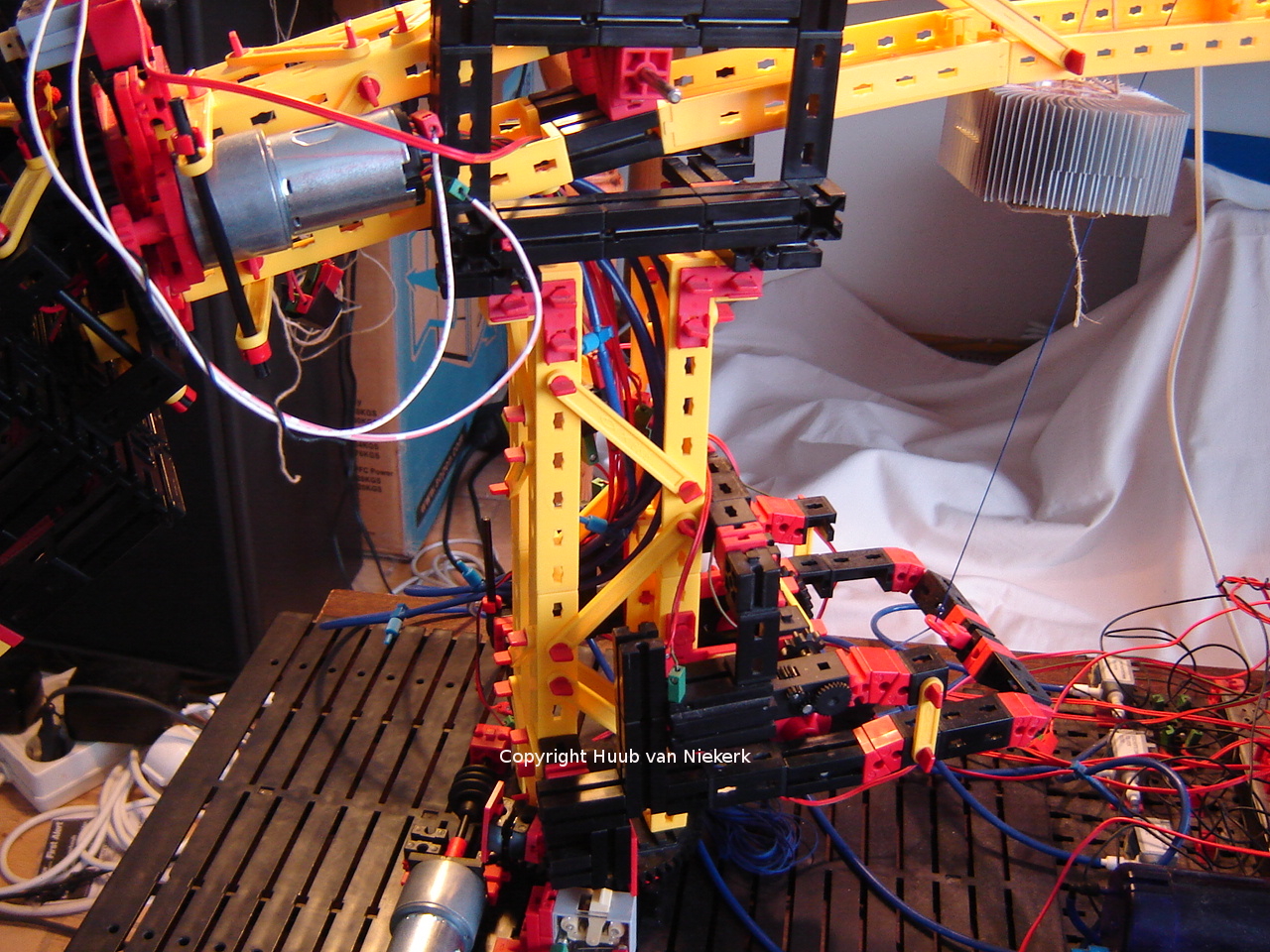
7 April
BB: First, I change the vnc geometry. Then, to find out how the carriage would act with counter weight, I experiment with it. This leads to some insight that it needs change.. but how? In the end, how should the weight be? Click the first image to watch the video.
RPi2/ROS: After changing the vnc geometry here as well, it looks much better. Then, a new attempt with the xs motor, finding out that GPIO and LED don't follow expectation. So: rewiring, some electronics, some coding. But will it work? Click the image to watch the video.
Mydfir: Testing the buzzer, it turns out its setting needs a change. The floortest reveals the software needs a change, but some weird stuff keeps happening. Why? Click the first image to watch the video.
Discovery: Testing dates, sensors and counters on both firmwares gives some weird results. But why? First conclusion: library issue? A floortest is nice to do, but without clear output... Click the first image to watch the video.

Arduino Yún: Starting with pwm check and a minor change in code. Then trying the motor: will it run? Then a check for another frequency and something goes OOPS. Why? What can be done? Click the first image to watch the video.
Mirft2: First I use ROBOPro to check if the lamp and switch actually work. Then, after getting feedback from the developer, I fix the print issue I also have on the Discovery. Next: will the switch and lamp work? Then: the original firmware.. so Android. Will things work? Click the first image to watch the video.
RPi: Trying the XS motor with applying 5V: what's the result? How does it respond with and without pwm? Adding an LED and rewired: what happens? Too bad the camera feed has some delay. Click the image to watch the video.
Arduino Mega2560: Continuing with SPI and the Uno: LEDs issues, wiring ,are they OK? Serial monitor, does it work? Is the code ok or not? Tutorials show something is missing (oops). After some code changes: what works? What doesn't? Some mechanics needs attention as well. Click the first image to watch the video.
Hand: Checking on the pneumatics reveals a possible motor issue and wiring issues. Then, when everything on the hardware is checked and a (temporary?) replacement has been done , a small software change seems to solve it. Click the first image to watch the video.
31 March
Instagram: when likes would be Euro's, that'd be some very nice money.
BB: Time to change code and bring some more logic. Will it actually work better? Then the carriage: can it be improved by reconstructing a power rod? Or otherwise? Click the first image to watch the video.

RPi2/ROS: Another attempt with a motor: this time a fischertechnik XS motor. It runs, but how? Trying out leads to some changes in electronics as well as in code. When it seems to work, why doesn't the switch work? Wiring can't be that hard. When solved (?), does everything work the way I like? Click the image to watch the video.
Mydfir: After all the weird stuff, it's time to get some "clarity". In order to get this, I decide to add another colour sensor and a buzzer. This brings some reconstruction and recoding. Then it's time for the floortest. Will it work? Click the first image to watch the video.
Discovery: After a few weeks, it's time to check if everything still works. This comes with a few surprises and oops. But how come?! Click the first image to watch the video.
Arduino Yún: After the previous tests, now the XS motor. With a few oops, the idea is to mimic a potmeter, rewire, recode and see if this works. Click the first image to watch the video.
Mirft2: Time to do some more tests. Also: adding a lamp is nice. It does require some more code though. Will it work? Also: reconstructing a leg and replacing some wires is necessary. Click the first image to watch the video.
RPi: After changing the vnc resolution, the black is gone. Then taking the XS motor, will it run on pwm? Of does it take rewiring, recoding etc? Questions arise during measurements. Click the image to watch the video.
Arduino Mega2560: To make sure that the SPI was no coincidence, I try expanding it using 2 LEDs and some more code. This leads to nothing: neither work so I have to rewire, recode and restest. Click the first image to watch the video.
Hand: First a new idea for the arm pivot motor: other gear, different setup. Will it work? Then: the wrist..would this be a software issue after all? Time to review the software and maybe add a fix. Will everything work now? Click the first image to watch the video.
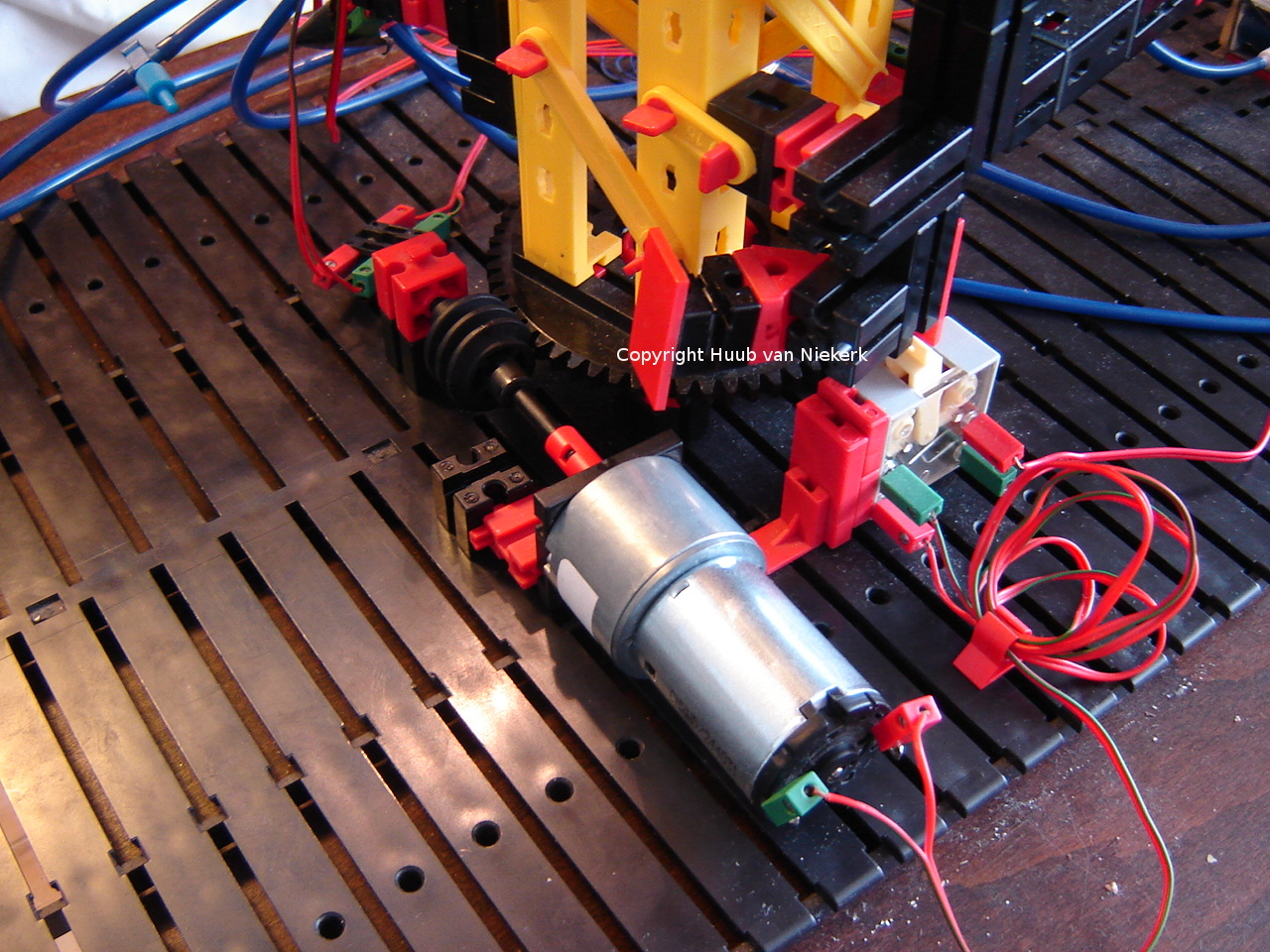
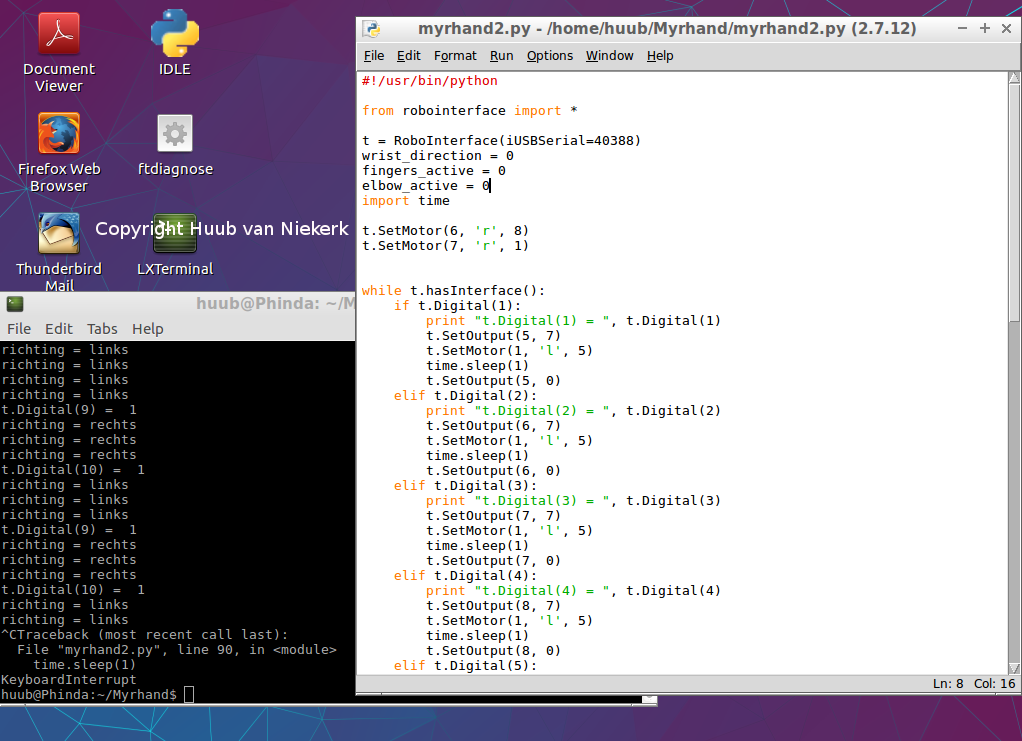
24 March
BB: The ground rod loses power at some point: time for a small reconstruction. Will it help? Then incidentally/accidentally I find out why the carriage loses speed: seems due to the way it's constructed. But how to change that? Then the code seems to have a few flaws and needs some changes. Click the first image to watch the video.
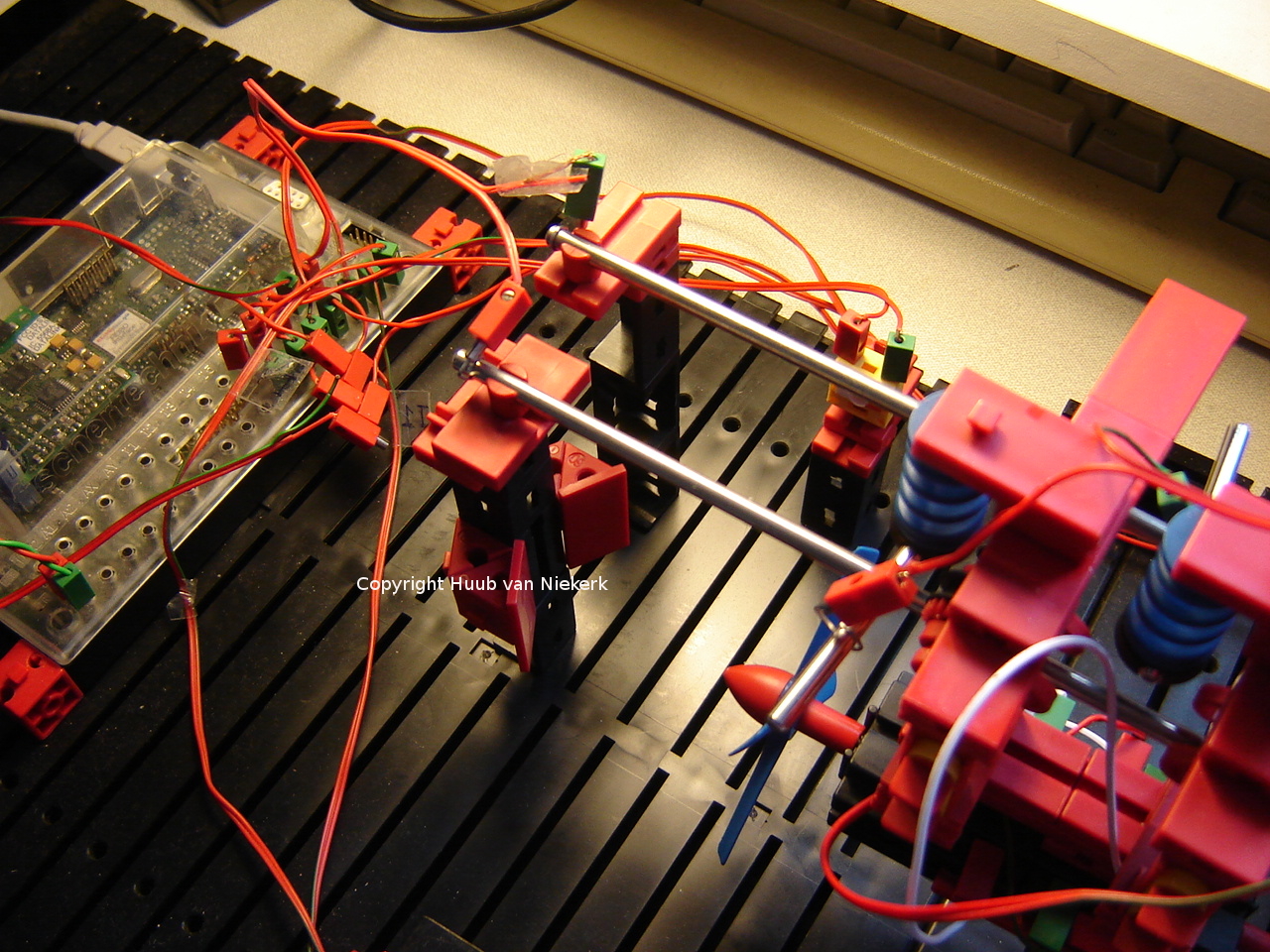
RPi2/ROS: In another experiment it shows that a powermotor doesn't work when a small motor does. So how is it here? With the transistor removed, do the LEDs work? Then the switch: measuring reveals some oopses. But how to solve them? Click the image to watch the video.
Mydfir: Changing the wiring a bit to see if the behaviour is anything different. Then weird stuff happening. A good look at the code leads to some changes. Will it matter? Auto correcting is nice, but why does it happen the way it happens? Questions but what are the answers? Click the first image to watch the video.
Arduino Yún: Experiences leads to a change of motor, but will it help? Then a dive into pwm: where does it go wrong? Will code-changes help? Wrong info leads to more questions. Click the first image to watch the video.
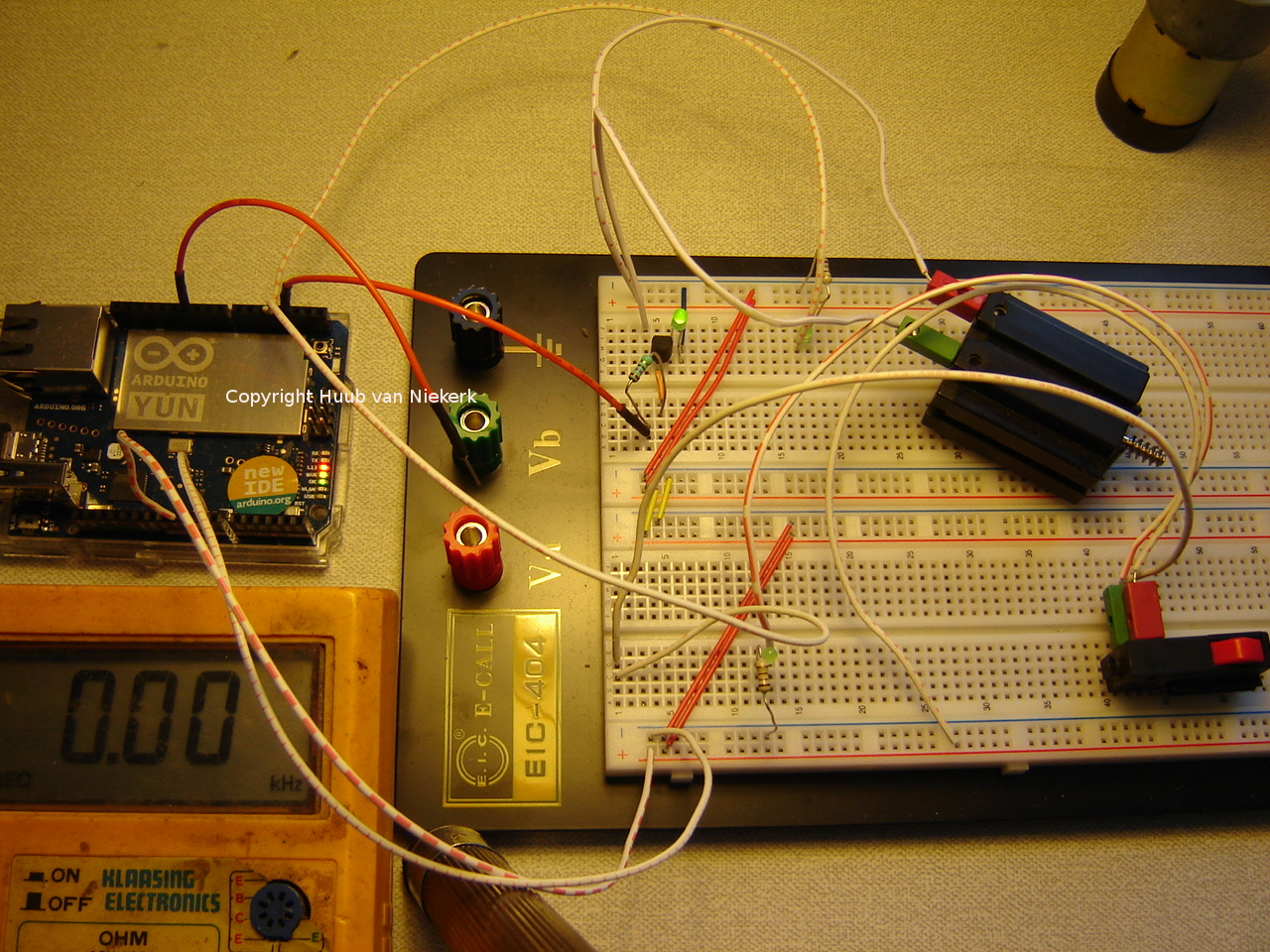
Mirft2: Staying with the community firmware, I test the front sensors again and get remarkable results which also raises questions. I decide to change the code to get clearer screen output and also decide for a wiring change. This leads to a conclusion, another addition, test and ideas for next time. Click the first image to watch the video.
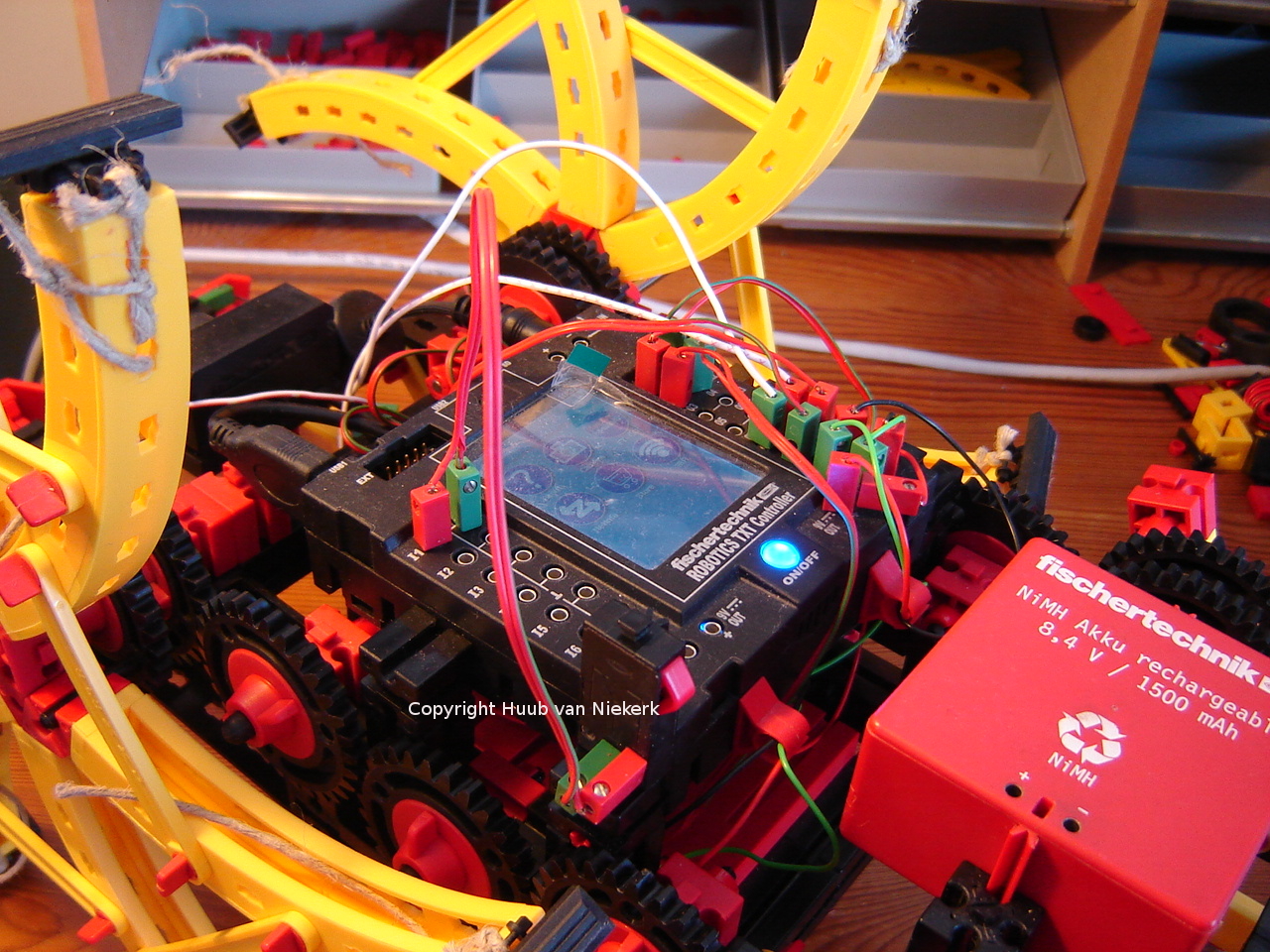
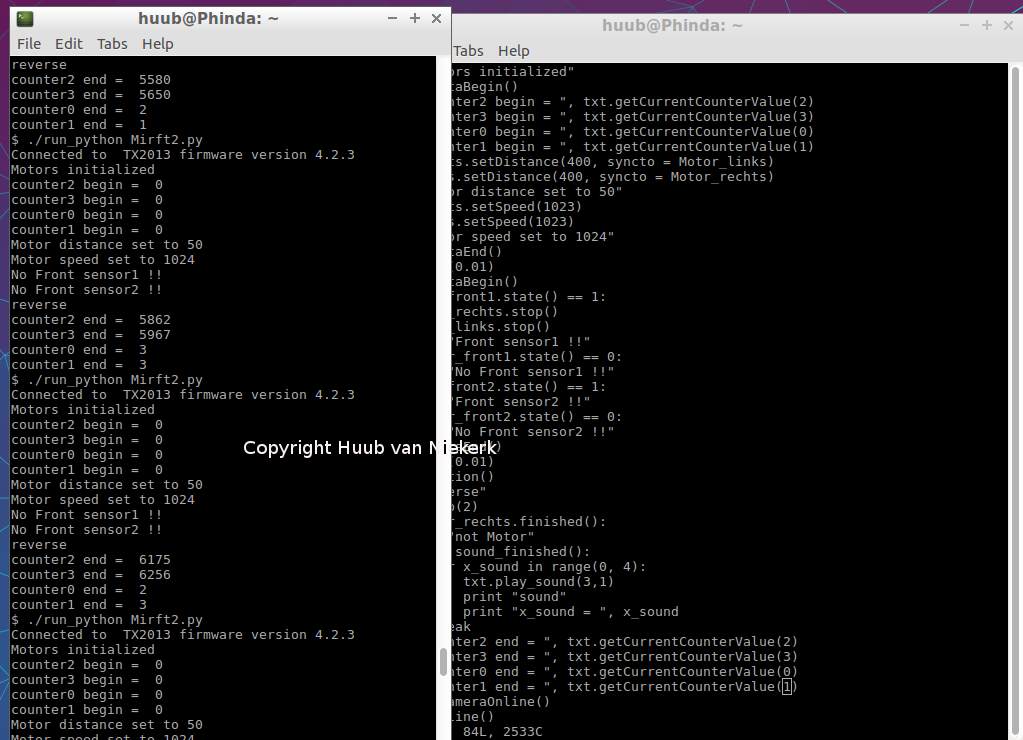
RPi: Diving once more into hard pwm, and a camera experiment: it is possible to stream video according to this info. Several code changes look promising but will it really work in the end? So far it's still doubtful. I like the camera change though. Click the image to watch the video.
Arduino Mega2560: To get code working, I first meet with an oops. Then, after fixing this, further implementing SPI and another oops. In the end, does it work? Click the first image to watch the video.
Hand: The arm pivot motor needs to be reconstructed, but will this work? It seems easy enough. Then the wrist pivot motor has stopped working. Why? It can't be software, and the diagnostics already showed it's not an electrical problem. Several attempts, but will the problem be solved? Click the first image to watch the video.
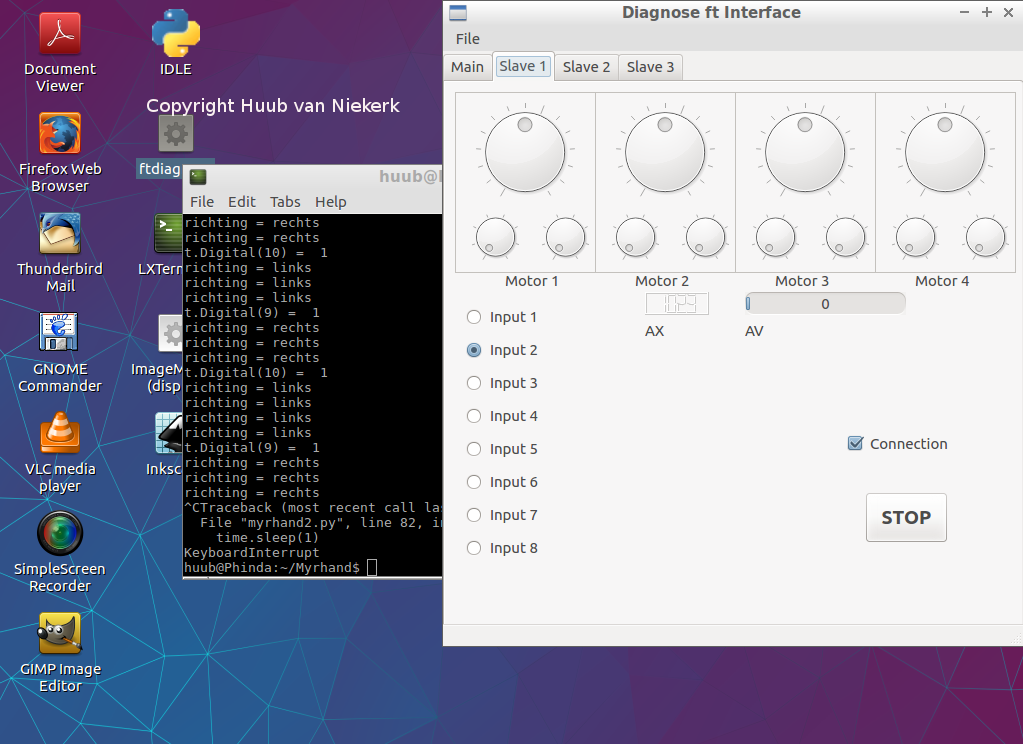
17 March
BB: The carriage doesn't behave as it should with respect to propeller speed and direction. Would a reconstruction solve it? A look at the code shows why the screen output starts with the wrong sensor, the code needs a change. But does it all help? Click the first image to watch the video.
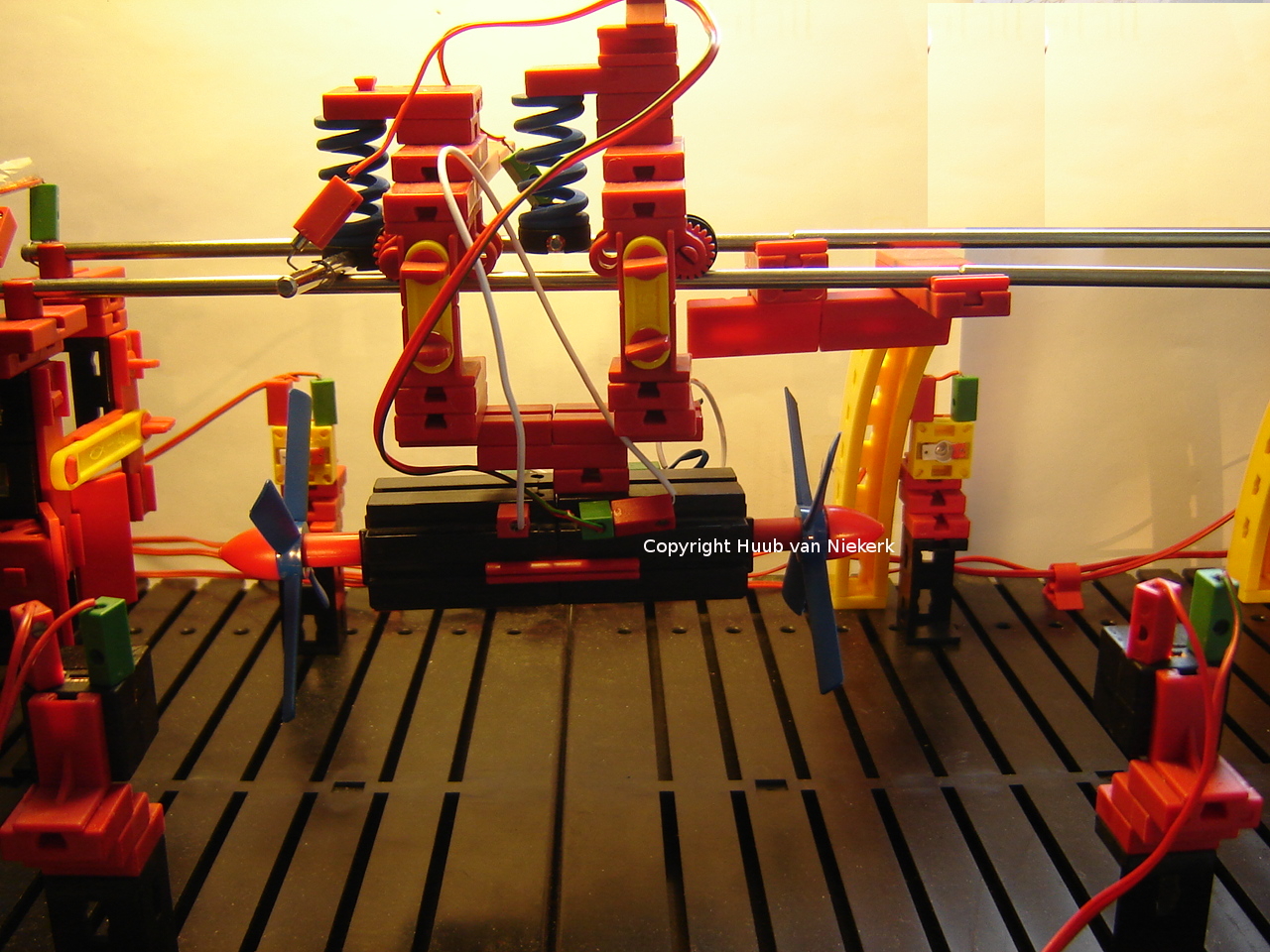
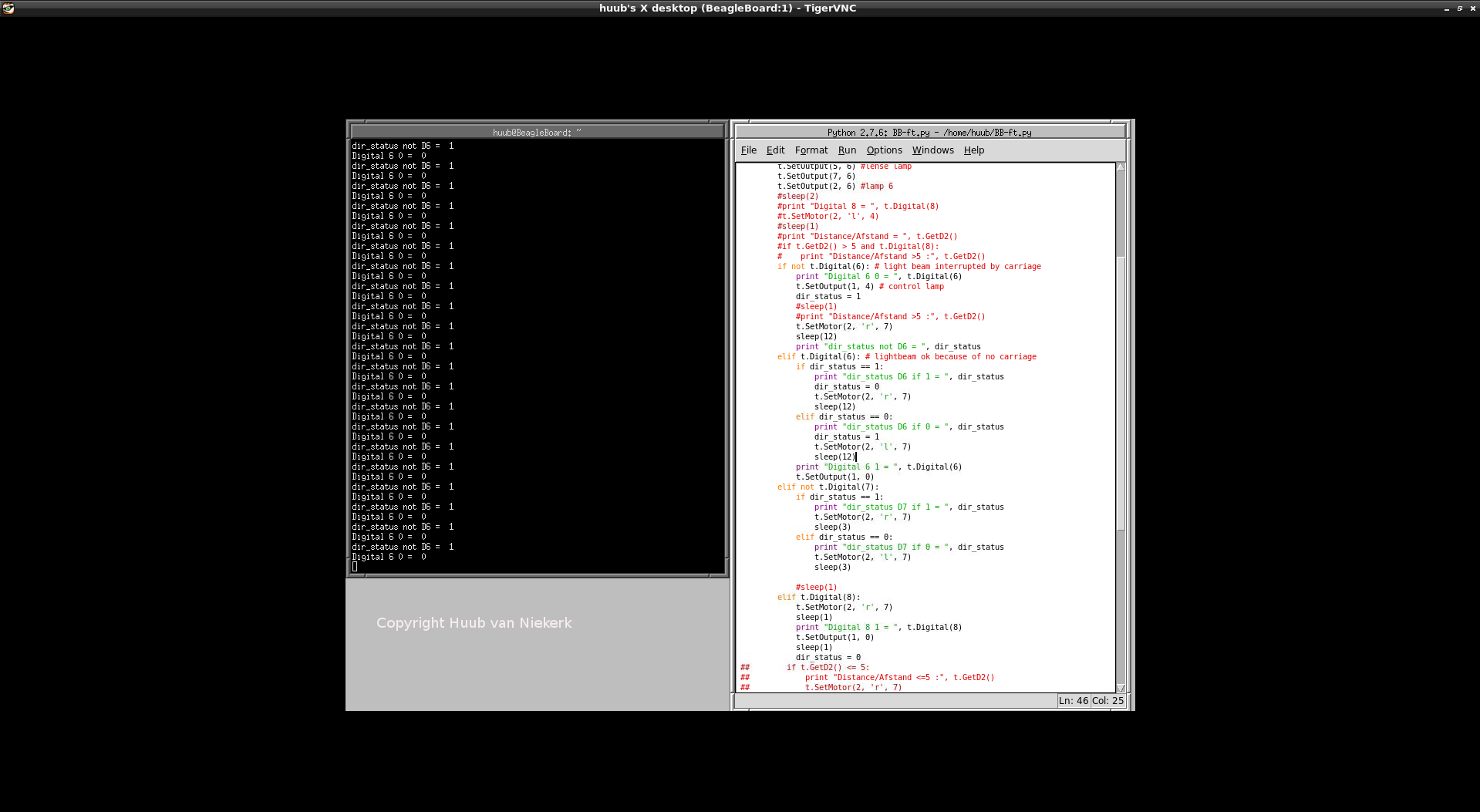
RPi2/ROS: I an attempt to solve the 1== 0 (?) problem, I decide to overrule the switch and change some more code. Then some measurements reveal the probable reason the motor doesn't work. So what then? Click the image to watch the video.
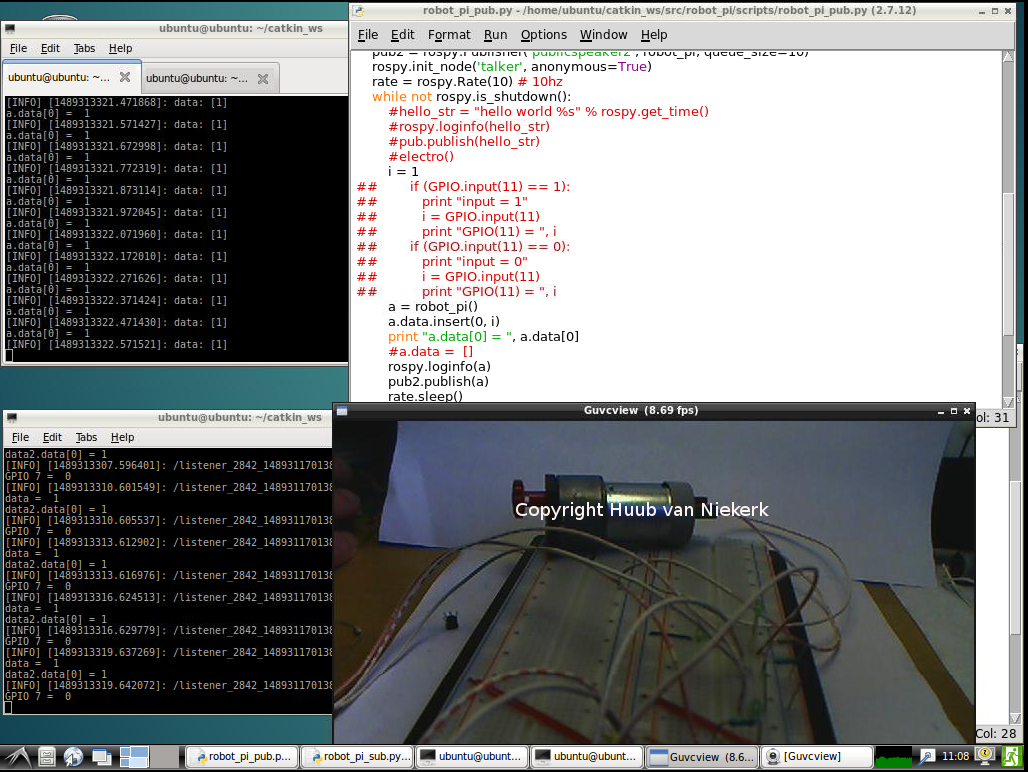
Mydfir: After the last time, I decide to observe both the map more closely and a different direction. Also: when exactly does it lose track, some weird behaviour and auto correction. Finally, some code and ideas. Click the first image to watch the video.
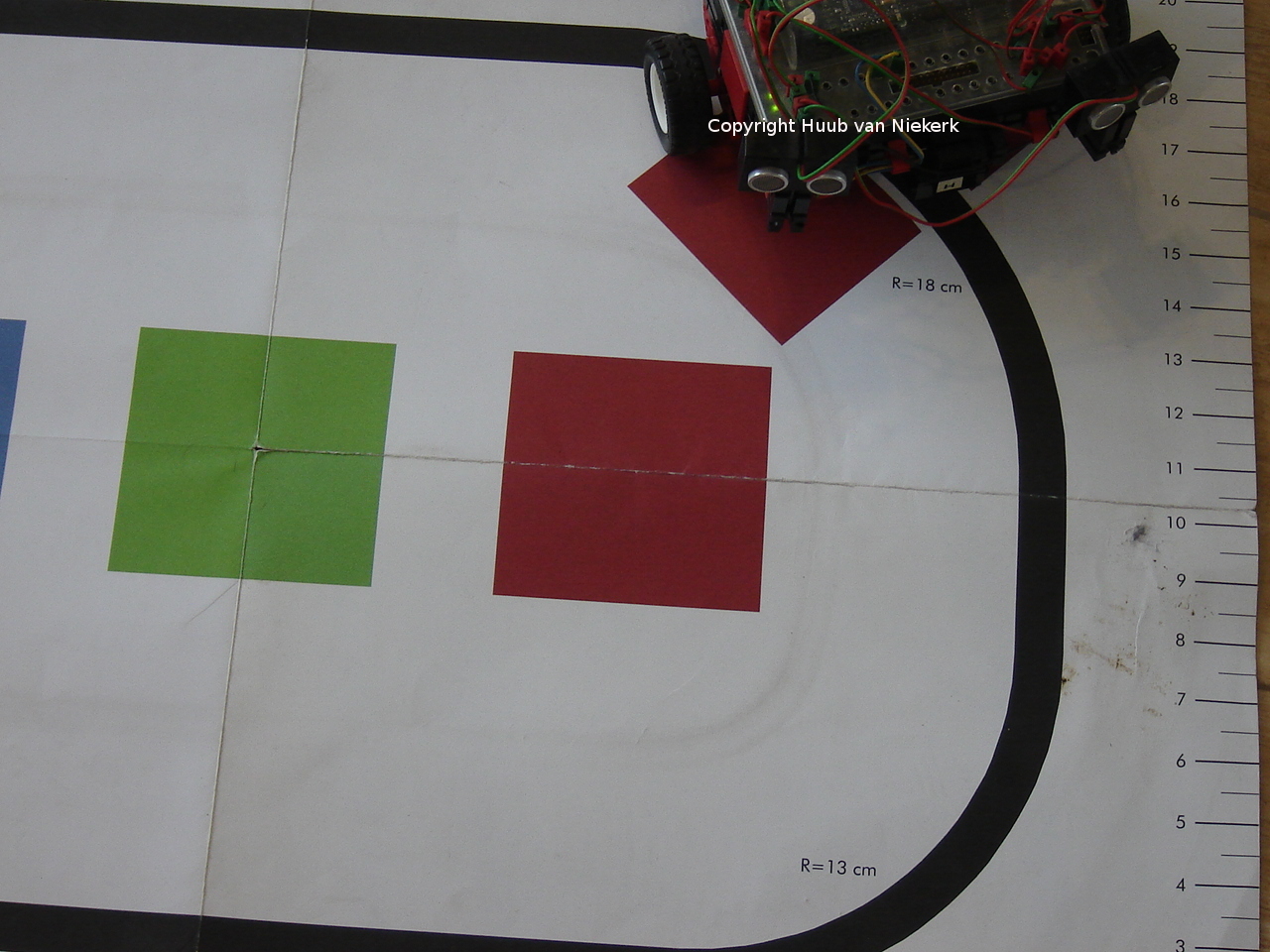
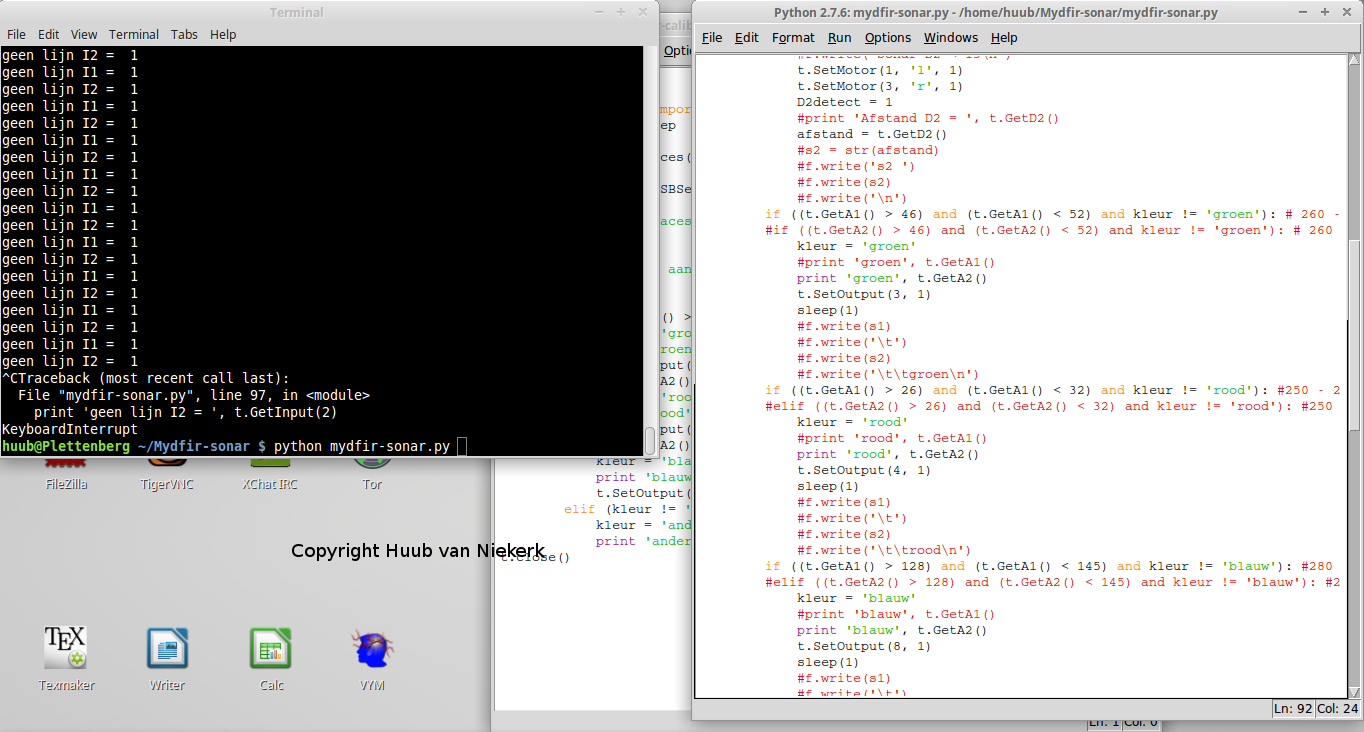
Arduino Yún: Time to recheck on pwm, voltage and adding another check-pin for the pwm. The results raises several questions and leads to a code change. But will it help? Click the first image to watch the video.
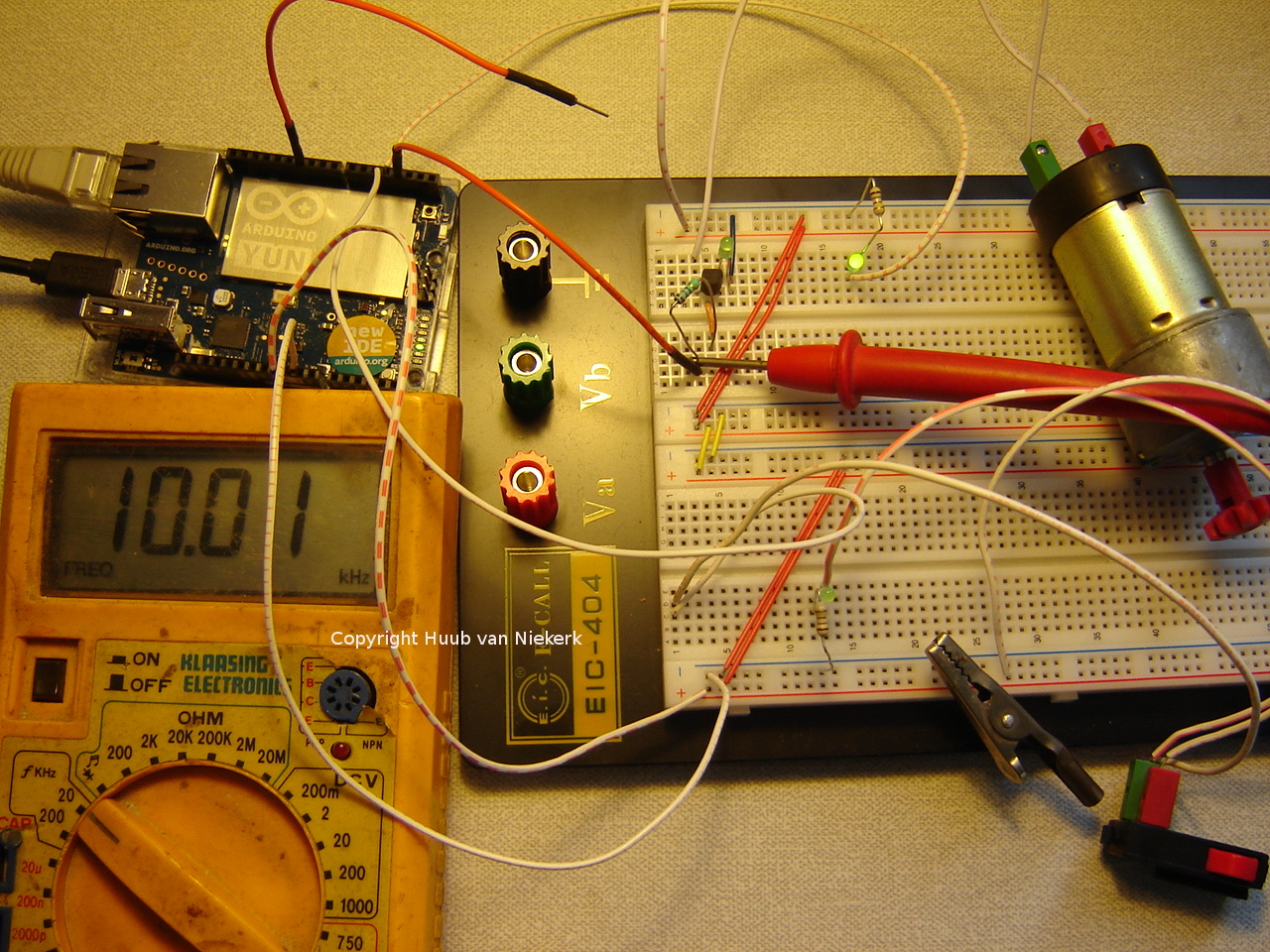
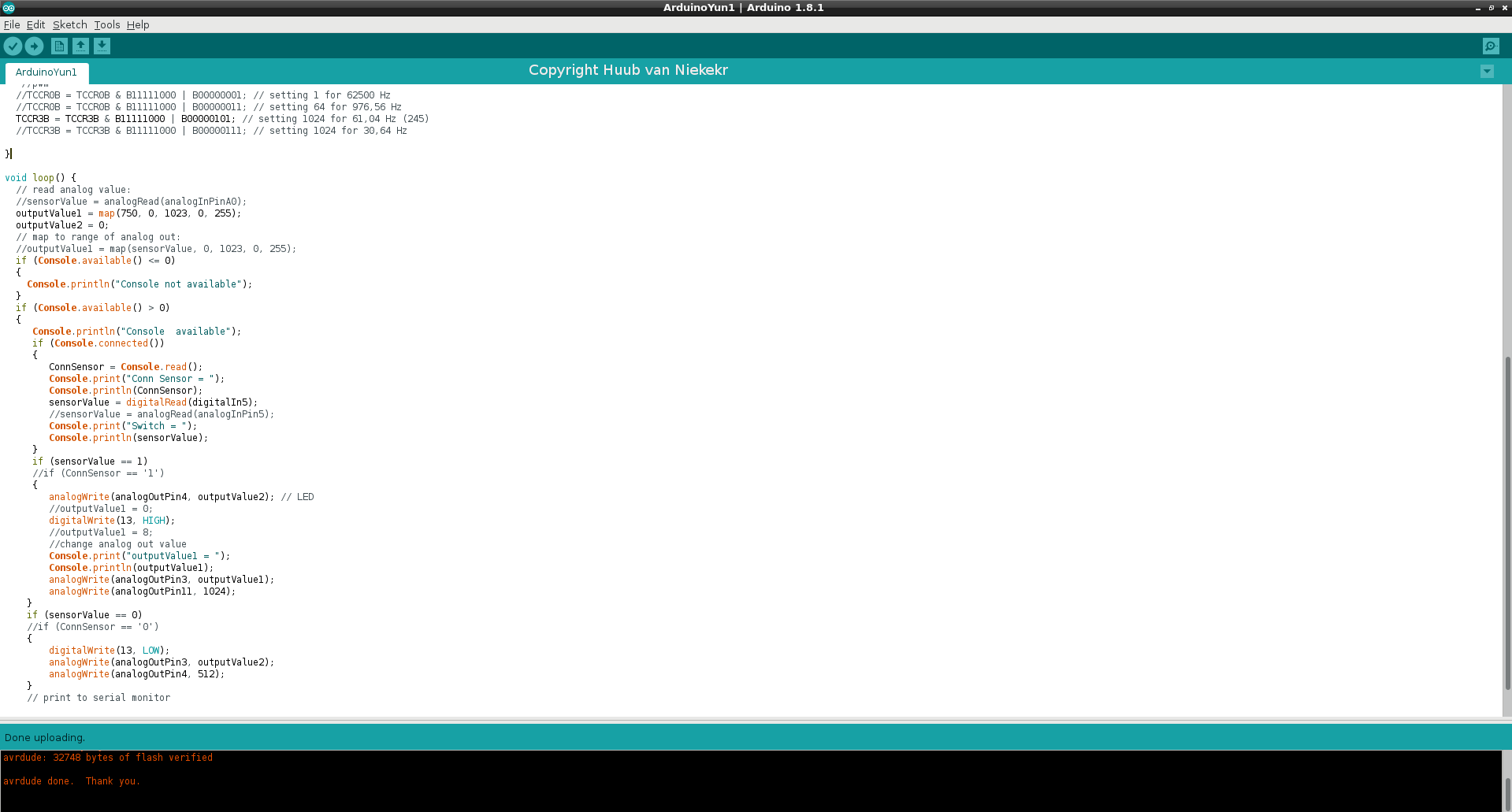
Mirft2: After studying an example with the LED on the controller, I find I made a mistake and the LED is of no use. Then the idea is the use a front sensor on Cx. This brings an unexpected result. Then a leg gives a problem...but how to solve it. Click the first image to watch the video.
RPi: Question: what's the voltage on the motor? And on the LED? Then the code is a mix and has to be cleaned. Will it work or not? Click the first image to watch the video.
Arduino Mega2560: Checking to replace a motor by another model to see if it works out with an unexpected result but which might explain other results as well. Then the motor-stopping algorithm/mechanism works better than expected. New experiment: a combination with the Arduino Uno and SPI. Click the first image to watch the video.
Hand: The arm needs an extra weight, but what to use and where to apply it? Then, the vertical gear lower switch has to be fixed. Also, the arm pivot has problems, but how to fix that? Finally, the wrist doesn't work. But why? Click the first image to watch the video.
10 March
BB: Starting with code: improving motor speed, time. Then a bit of reconstruction and test: will it work? Next, how can the lamps stay working? Will it work? Click the first image to watch the video.
RPi2/ROS: Studying the odd results I find results that actually can't be there. This leads to some rewiring and a GPIO test. But will this reveal the cause of the problems? Click the image to watch the video.
Mydfir: Starting with the top tool on Linux, and finding the difference in lighting. Then using sonar for line following correction and some remarkable observations. Any closer to a solution? Click the first image to watch the video.
Arduino Yún: Starting with a little oops, I try pulsewidthmodulation here as well. After some trying with code from the Mega2560, I find some more info which shows the Yún is a bit different. When applying some changes, I'm in for a little surprise, but will things work? Click the first image to watch the video.
Mirft2: Using the original firmware again, I get 2 oopses. After that: adding an LED to test a counter, but are those results correct? Is this the way to test it? Click the image to watch the video.
RPi1: Since the current situation is not working, I search for another solution and find some code. Will this work? Some rewiring is needed as well. Does the single LED work? Click the first image to watch the video.
Arduino Mega2560: Letting the motors actually stop is delayed by some unexpected communication issues. After temporarily solving these the wrong way, it show that it works, kind of. Timing isn't perfect, but it's not a perfect situation either. Click the first image to watch the video.
Hand: Replacing wrist motor and adding bi-polar switch solves a problem and saves code. Then the lower gear box: this can be solved too but then some analysis. Why doesn't the axis reach the upper switch? One conclusion, but how to solve it? Click the first image to watch the video.
3 March
BB: Because of a threatening short-circuit, I have to reconfigure 1 of the power-rods. Then: what to do with the wires? And the 2nd motor needs attention: it's attached too flexible. Next is software, because timing is obviously too short now. And a lamp issue. And some more. Click the first image to watch the (bit lengthy) video.
RPi2/ROS: Trying to tackle timing and circuit issues leads to rewiring and questions about values instead of answers. Is there a delay somewhere? Click the image to watch the video.
Mydfir: Trying the combination of colour recognition and line following, both don't go really well. But why? Then: sonar works good but how does the combination go? Letting it go and then weird stuff happens. Click the first image to watch the video.
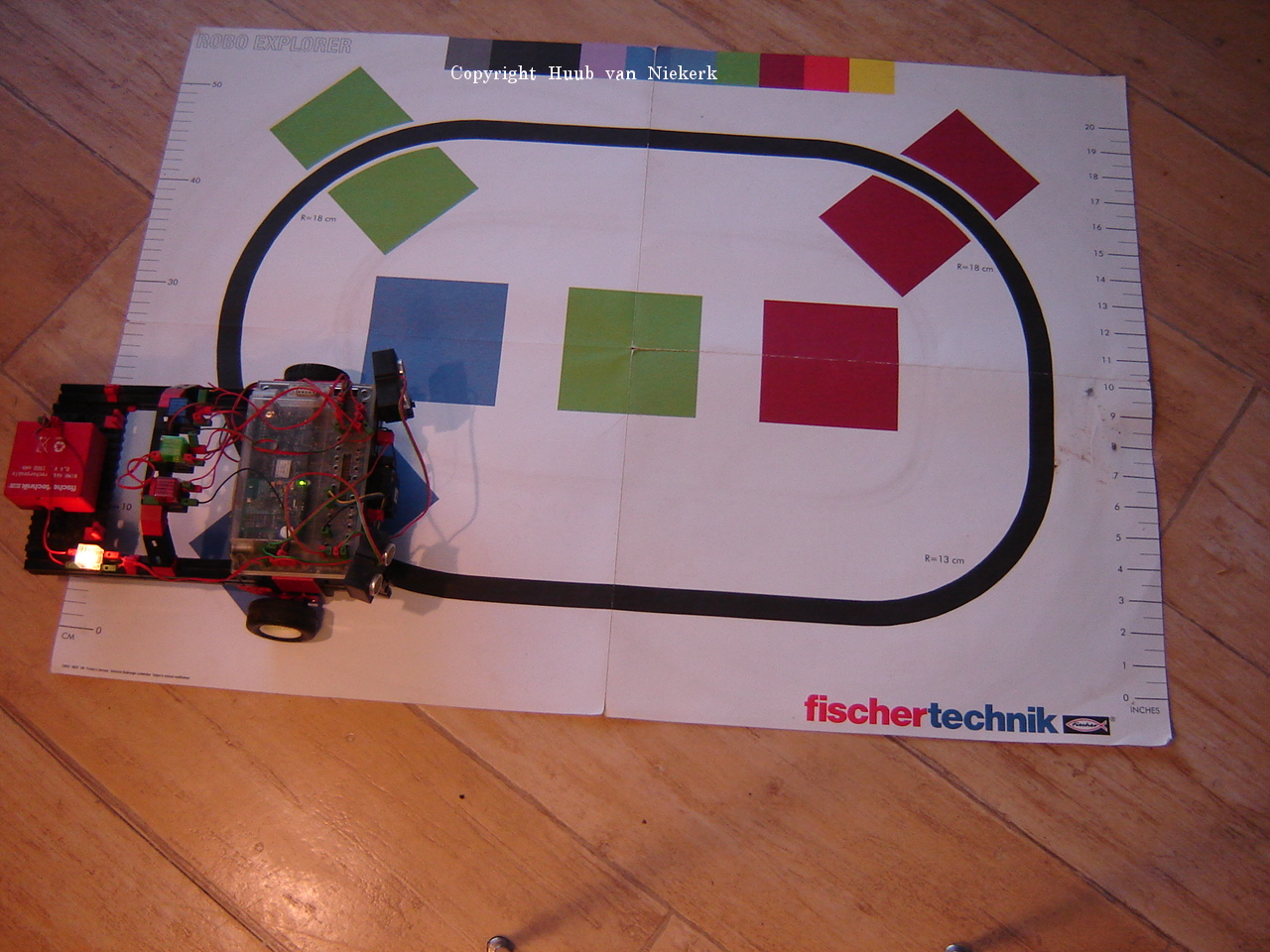
Arduino Yún: I first take a look at the network settings again: why is there no internet? Then back to the code: with which value does the motor LED work? How about mapping? Electronics: voltages are there, but why doesn't the motor respond? Click the first image to watch the motor.
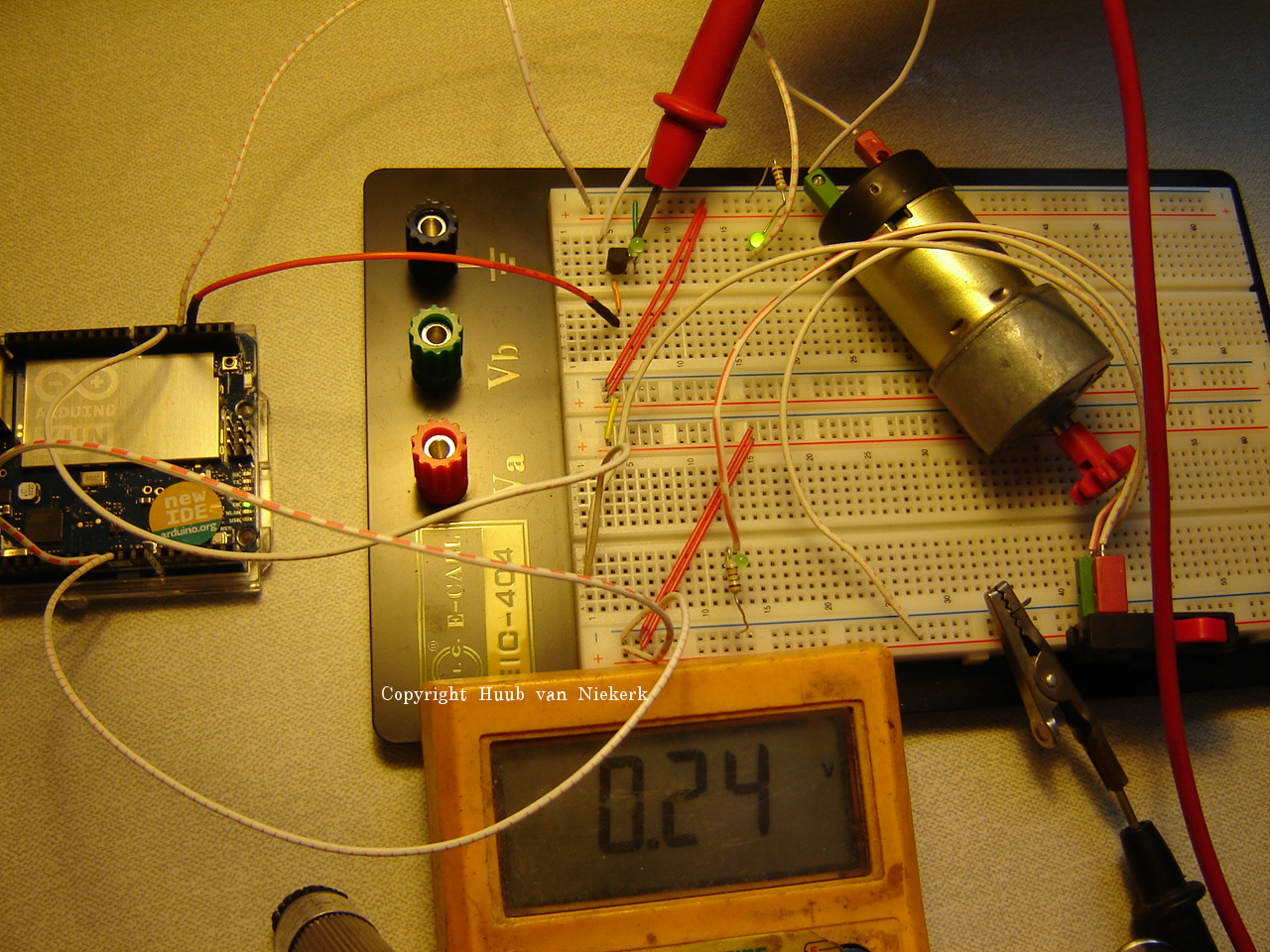
Mirft2: Leaving ftrobopy for the time being, I try the software using the original firmware again. This gives unexpected problems and oopses and once those are more or less dealt with, remarkable results. Click the first image to watch the video.
RPi1: With the found max of 1999 for pulsewidth, I change the circuit and add a potmeter to adjust the power. Then I find that using the opamp does have influence, but not the way I want. Does the hardware pwm work on the LED? Another change in the software makes me realize I probably need a different approach. Click the first image to watch the video.
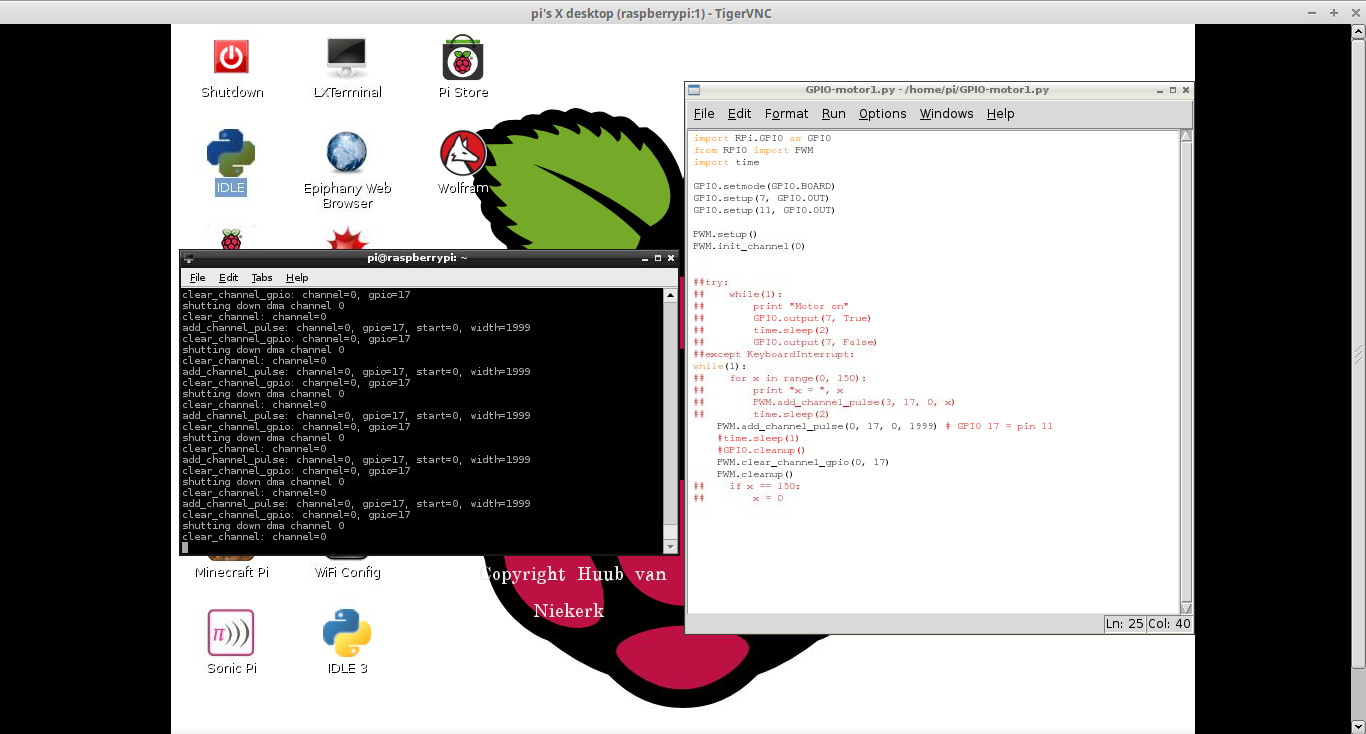
Arduino Mega2560: Changing the new switch setup brings a bit more work than expected. Then a rewire is needed and a bit of recoding. Will the idea work? Electronically, it works, but how about the mechanics? Click the first image to watch the video.
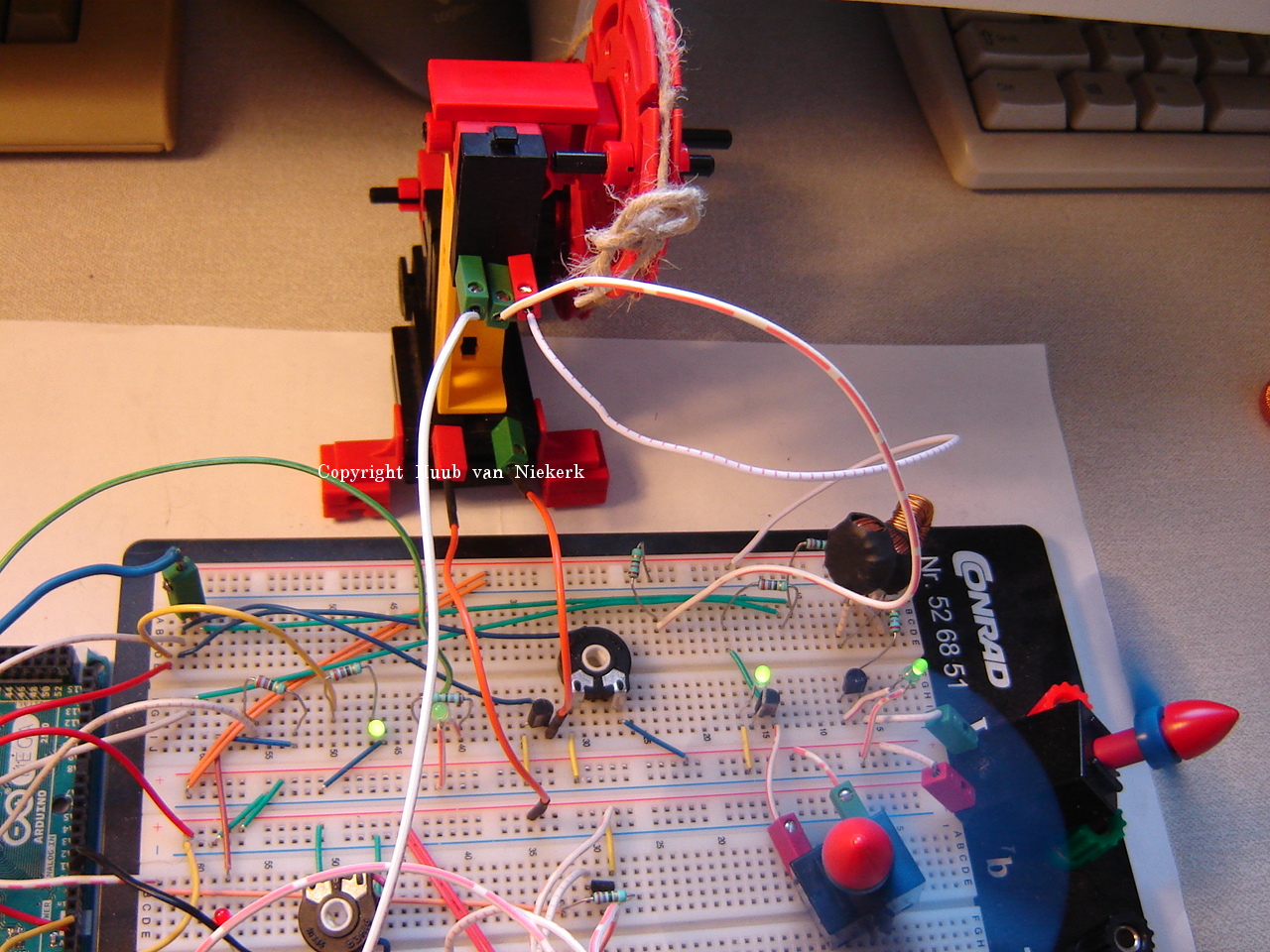
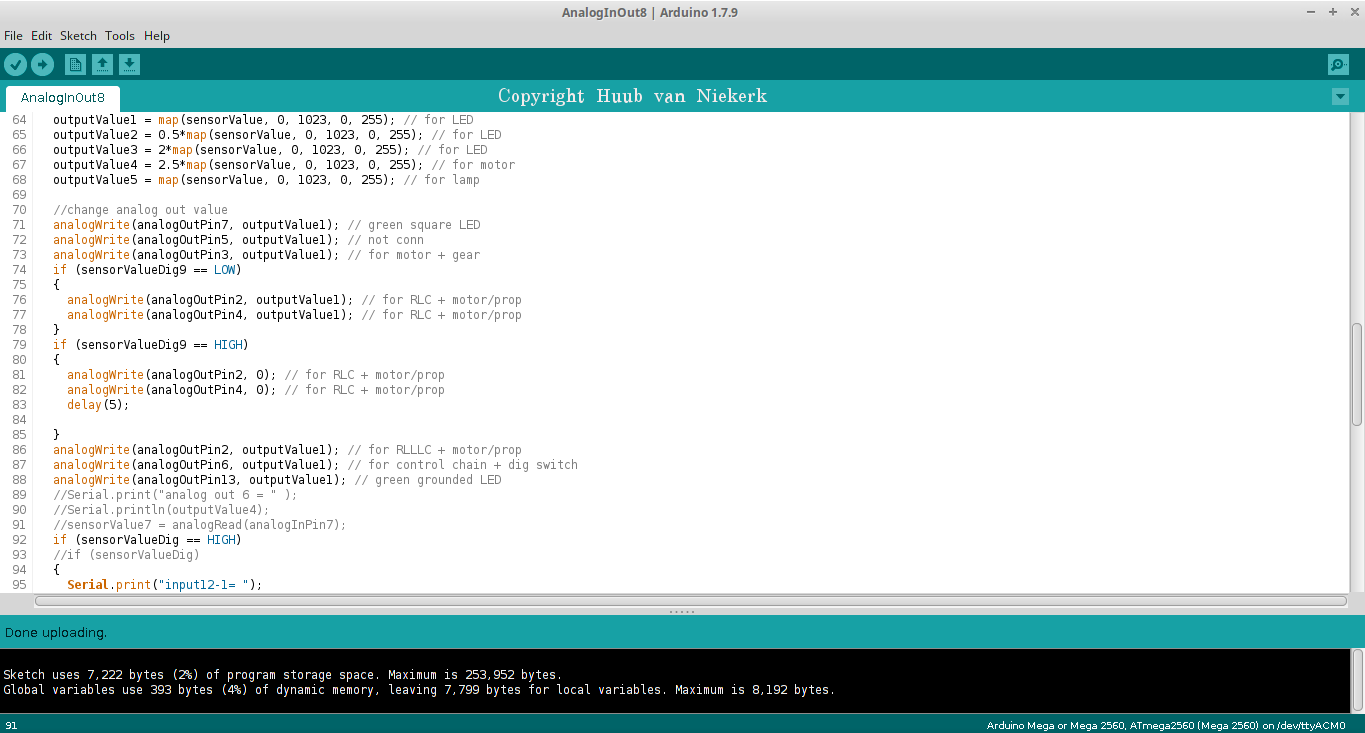
Hand: Starting with a small but necessary reconstruction, followed by a all-system test. It becomes clear that not all is working as expected: a sensor gives problems. But is that all? Click the first image to watch the video.
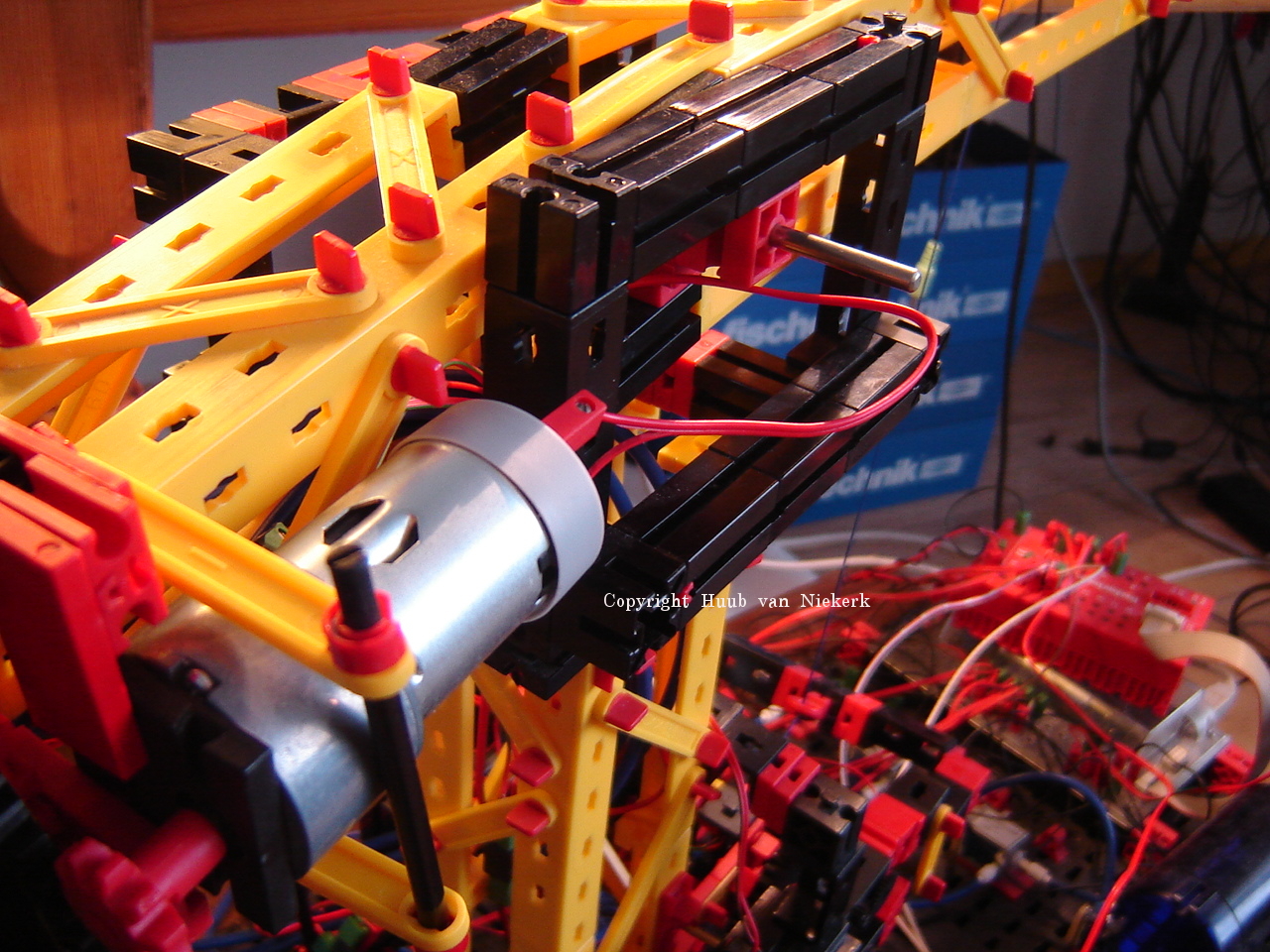
24 February
BB: I need to rewire and want to reconstruct the carriage. Then there's no power..? After somehow restoring the power, the speed is still a problem, But how to solve it? And will it work? Click the first image to watch the video.
RPi2/ROS: Several items to check: is there any voltage over the transistor (GPIO pin 7), is the switch input (pin 11) acurate, does the motor work anyway? The answers are surprising but leave questions as well. Click the first image to watch the video.
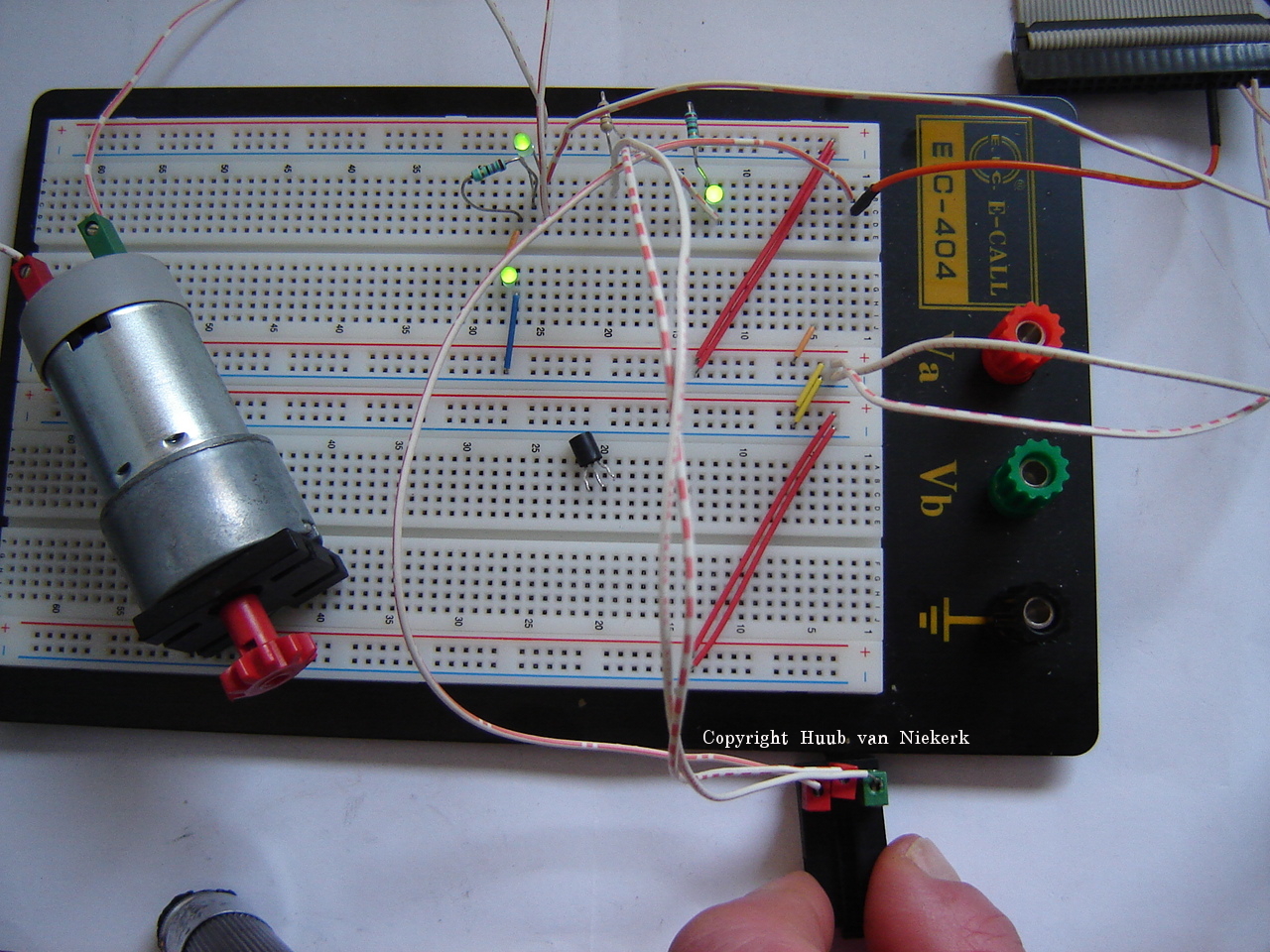
Mydfir: I start with the discovery of a tire issue. Then more colour checking, now with 2 lamps and "day"light. Once again, some questionable results. Then driving leads to changing the code. New insights, and then some odd events. But why? Click the first image to watch the video.
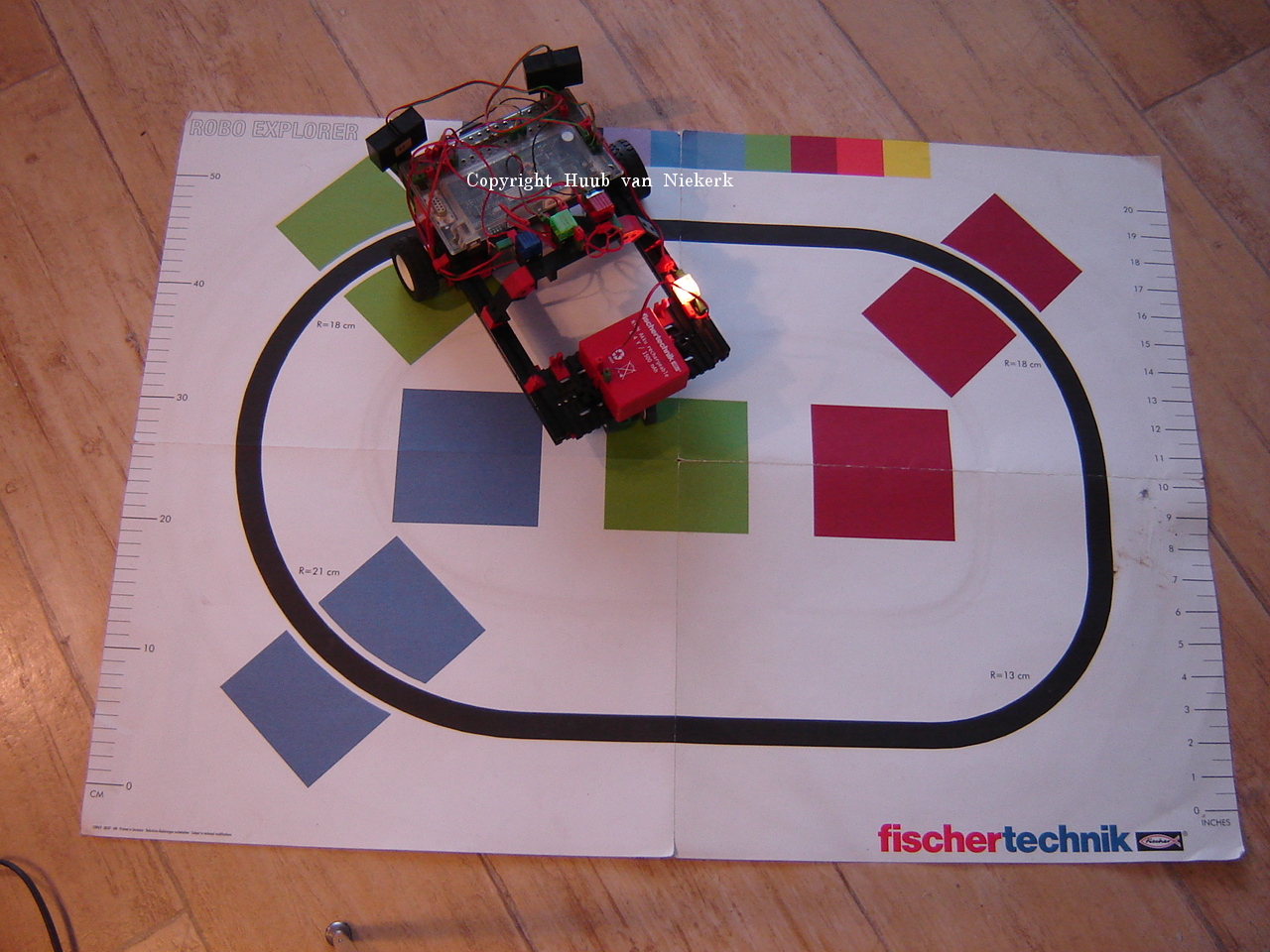
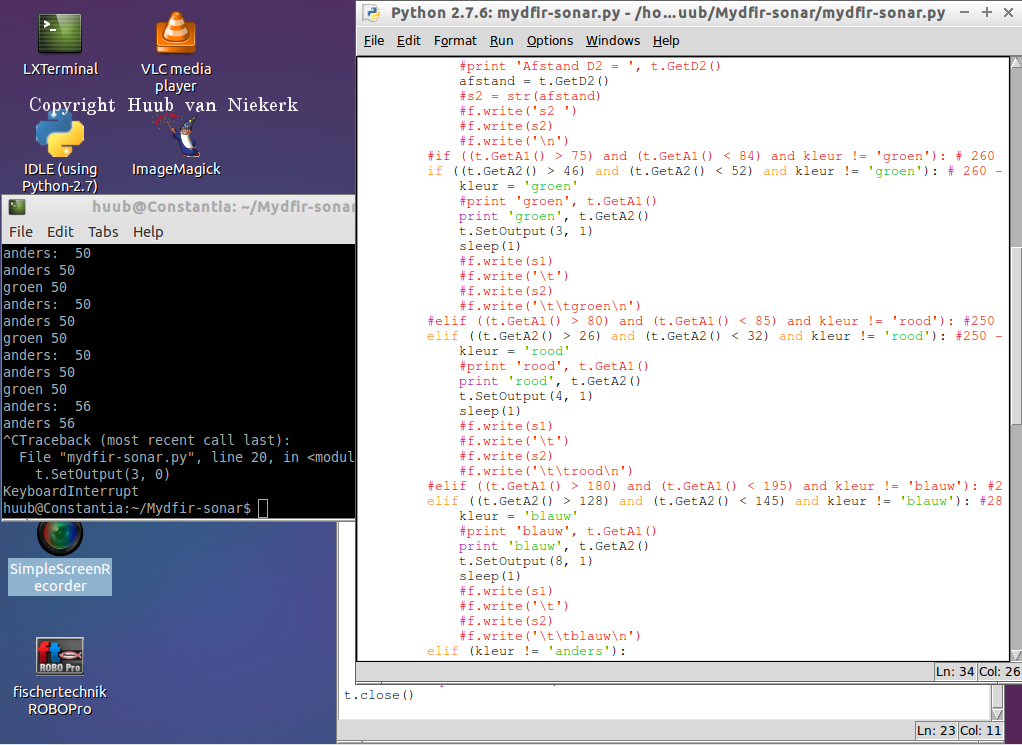
Arduino Yún: First I want to resolve an unresponsive LED, then it's time to add electronics and a motor. The motor kind of works, but not the way I want. Also, the LED works, but why this "bright"? Measuring gives an unexpected result, but why? Click the first image to watch the video.
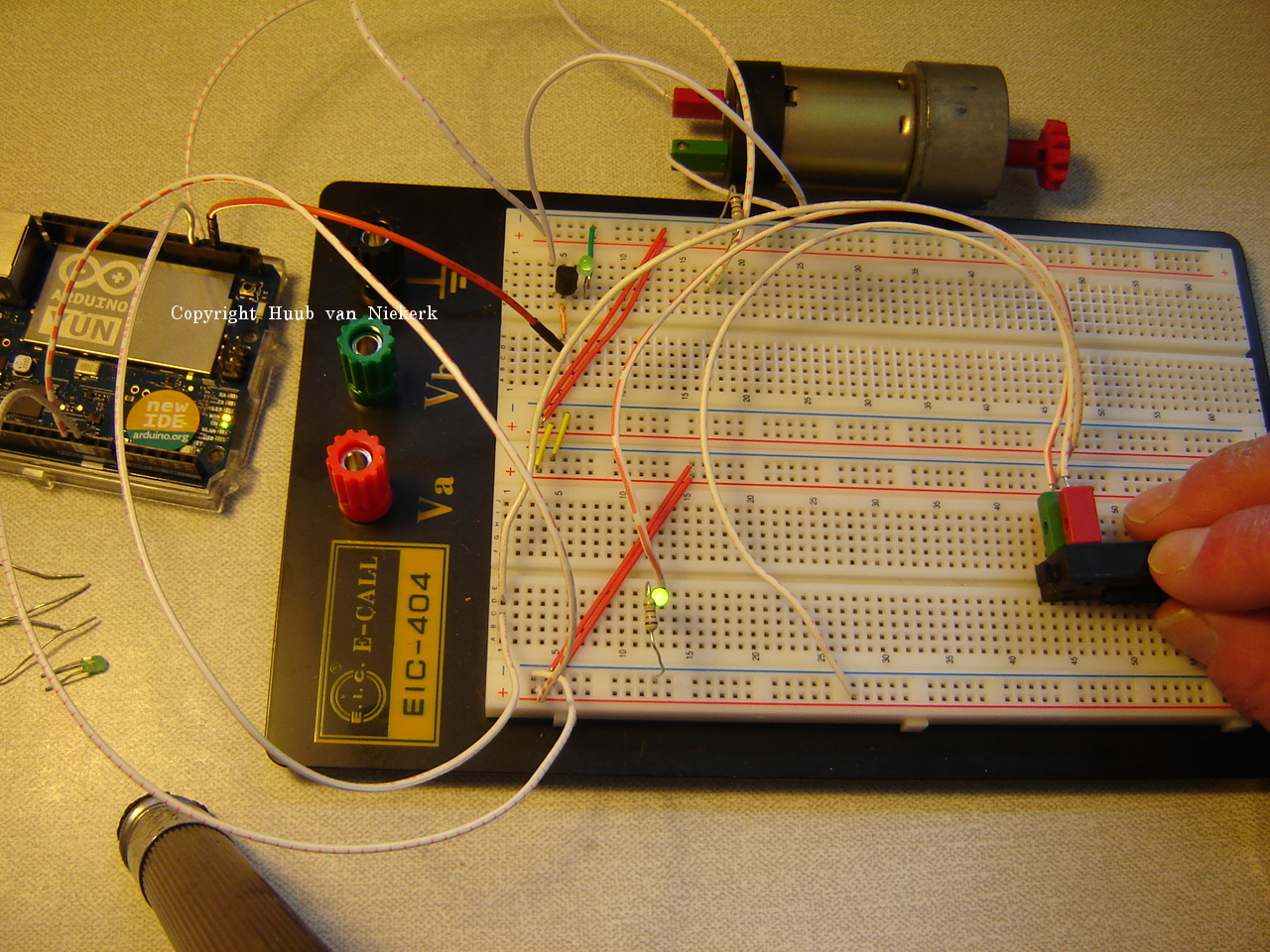
Pictures: Melexis Safety Trophy 2004 robot challenge (scanned from analog..).
Mirft2: With 1 sensor, it gives unreliable results, so what will happen with 2? Some improvisation is necessary. Counters give still 0, so time for another change of counters with noticeable results. Click the first image to watch the video.
RPi1: Why doesn't the motor just run on pwm? Time to check the code and values. Should things change? If so, how? Testing leads to an oops, conclusions and more questions. Click the first image to watch the video.
Arduino Mega2560: First task: find out why an LED doesn't work. After fixing this, what more can be done? Time for a new experiment: expanding a motor to touch a switch. Already have one doing so, but this one offers challenges. Question: how to solve them. Click the first image to watch the video.
Hand: The wrist problem forces a reconstruction and a recoding. When both are done, it turns out the wrist motor has a severe issue, but how to solve that? Also, it looks like the hand gives more than one problem. Click the first image to watch the video.
17 February
BB: Before doing a power test, the ground rail should be extended. Then, how to get power? And there are both ground and power to be used. Staples? And how? Will it work? Click the image to watch the video.
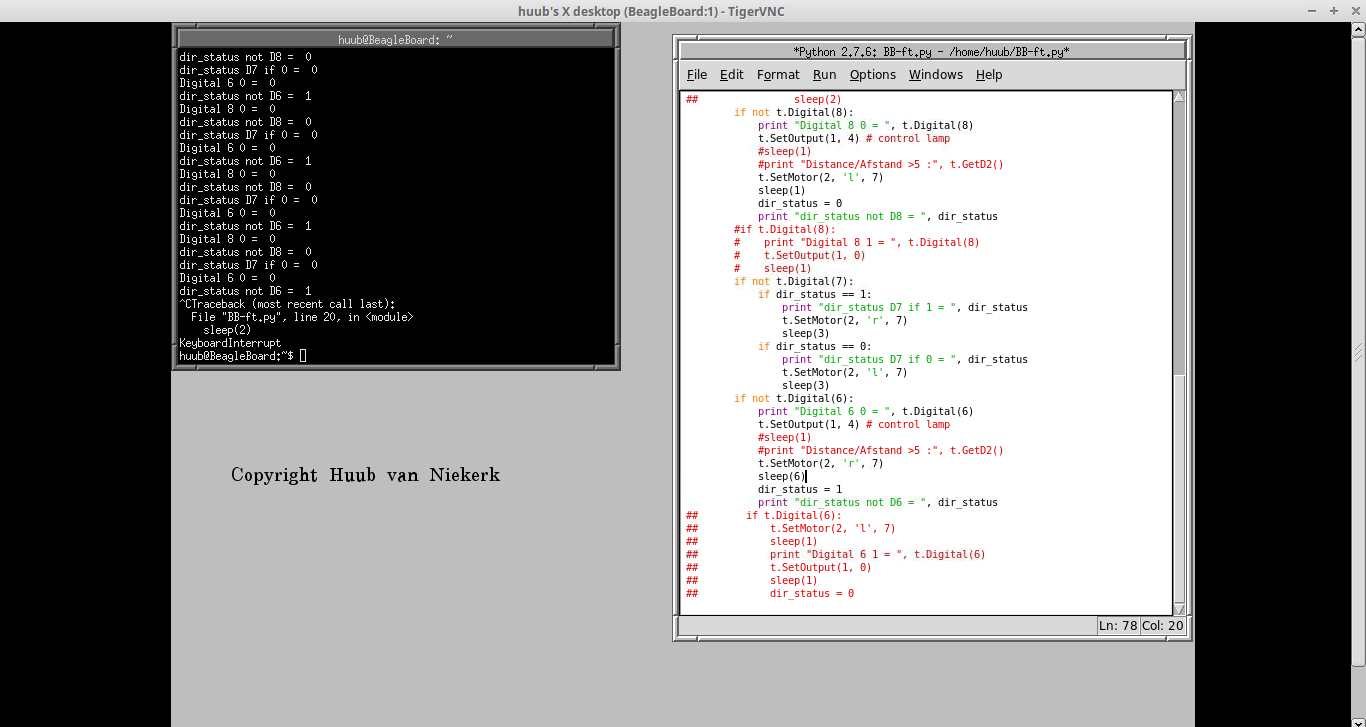
RPi2/ROS: Getting the motor to run, I change the setup bit by bit: electronics, wiring, software. Measurements give unexpected results. Click the first image to watch the video.
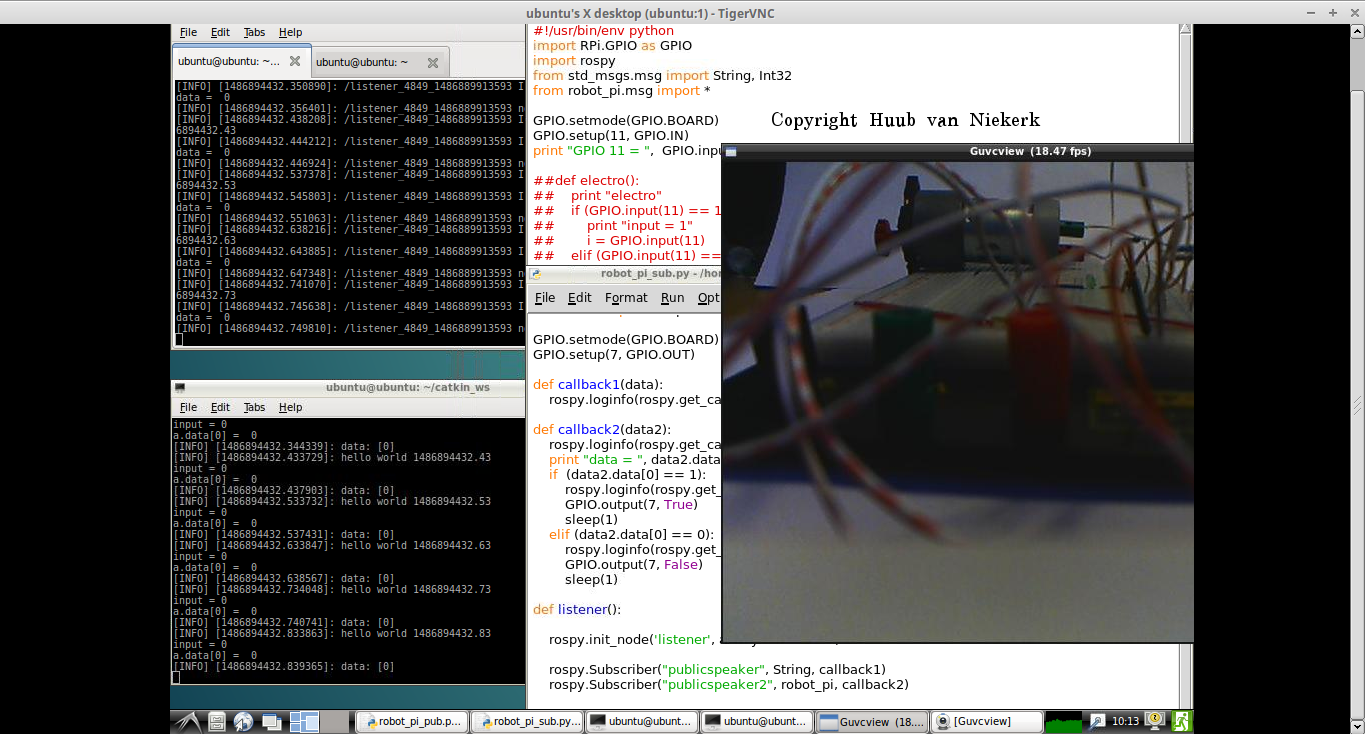
Mydfir: My old riding model needs an improvement in colour recognition, so the calibration can be merged. This shows more harder than anticipated: values and wires need to be checked. Do they match? Red = red, green = green, right? Click the first image to watch the video.
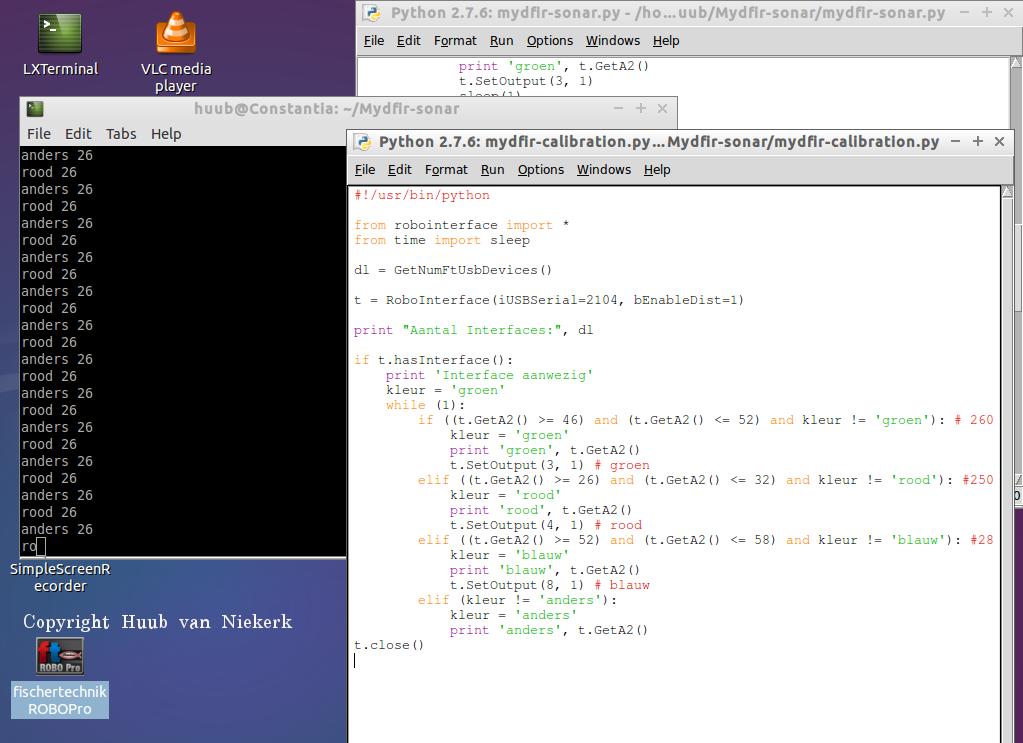
Arduino Yun: Now the console is functional, it takes a moment to realize that I need a pin for the switch. So I start "reading" it (capturing is a better description) and get nice output...which doesn't work for the algorithm. A change in code works much better, but when more electronics is applied, both could work out very nicely. Click the first image to watch the video.
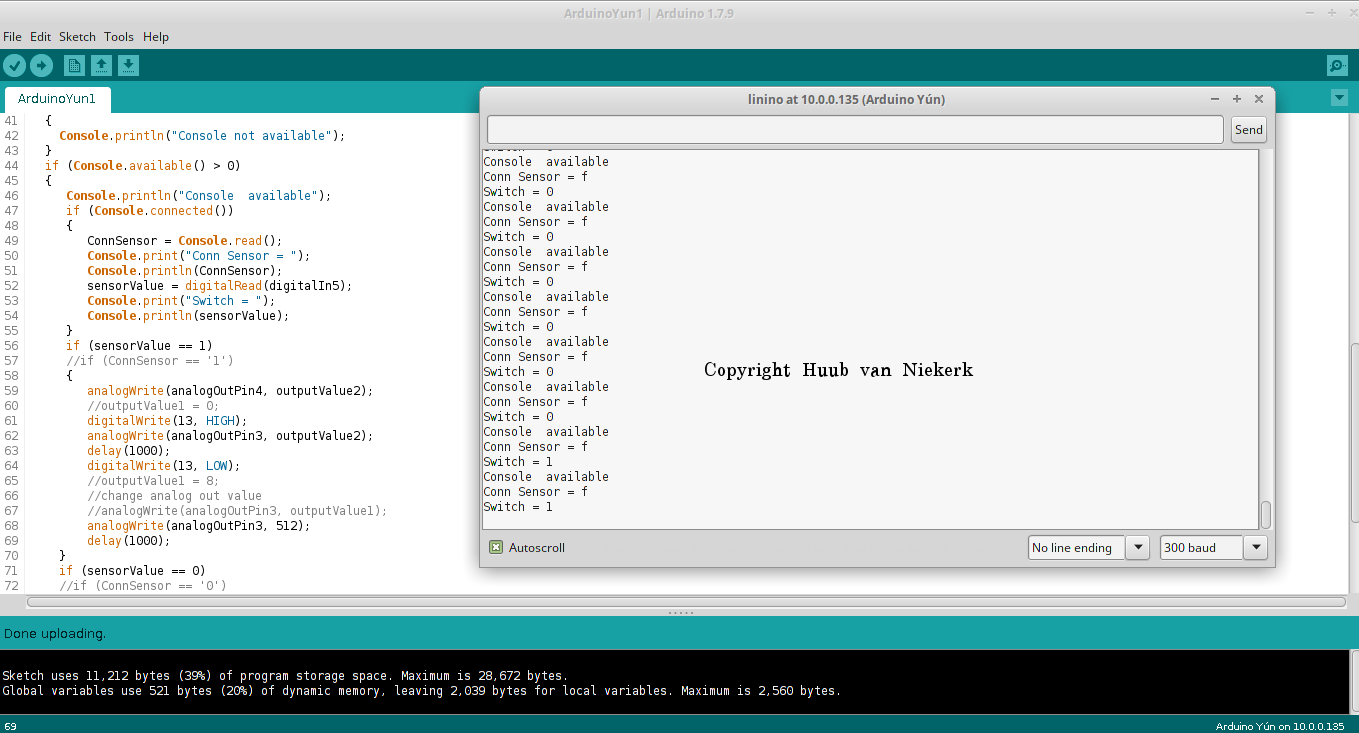
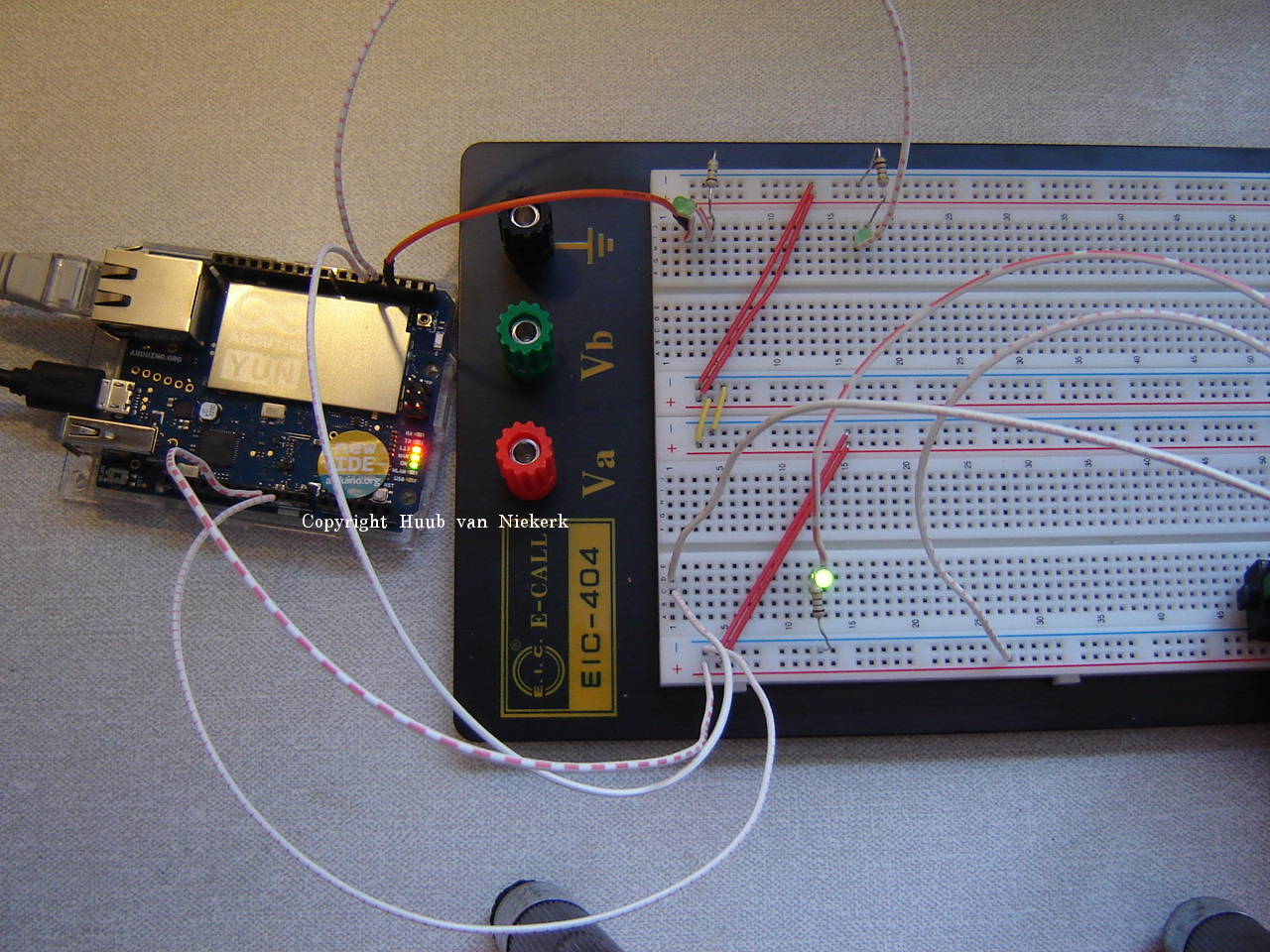
Compilation: I created a short compilation video from the 2008 conventions in Schoonhoven, Vlissingen and Veghel, all in the Netherlands. It was the first year I made some videos. Pictures can be found here.
Mirft2: Adding a touchsensor between the front legs is a nice idea. It requires some code and testing. Will it work nicely or just like the rest: sometime yes, sometimes no? Click the first image to watch the video.
Pictures: Pictures from the fischertechnik convention 2007 in Moershausen, Germany are added to the movies&pictures page. It was the first convention I visited.
RPi1: Adding a transistor didn't work and adding an LED and measuring shows why: voltage too low after the resistor. Replacing it shows a big difference, but is it due to PWM or voltage. Tests bring questions rather than answers. And then a big oops. Click the first image to watch the video.
Arduino Mega2560: Pins 4 and 13 have gone weird, but first I have to fix some electronics...which is controlled by software, as it to be expected. So after changing it a bit, the only unexpected result is a frequency. But why? Click the first image to watch the video.
Hand: The wrist pivot need improvement, but how? Software seems a solution, but somehow this seems to disable the rest. Why? An improvised switch shows an oops which leads to an even bigger oops and the finding of a software flaw. How to go on from here? Click the first image to watch the video.
10 February
BB: To get rid of the wire, a solution is to power the rail. This needs serious reconstruction but how to do it? How to power the rail anyway? Click the first image to watch the video.
RPi2/ROS: When trying out the circuit again, I realized I didn't install all of the software and some settings are yet missing after the big oops. When done, it's time for recoding and trying. And, oops, forgot to use the inscreen-webcam. Will it (or something) work? Click the first image to watch the video.
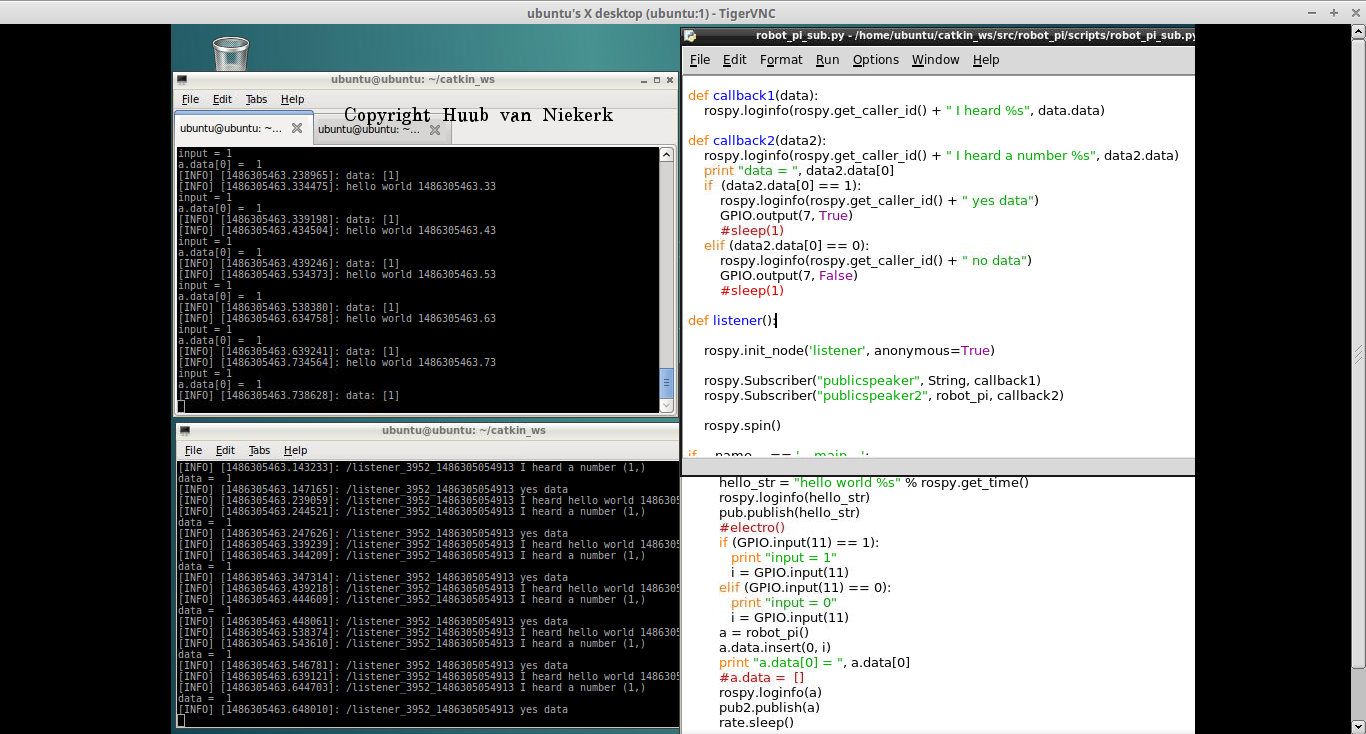
Discovery: Expanding the tests on pulses and counts gives some remarkable results with differences between ROBOPro and ftrobopy. But why? The hardware is an unlikely cause. Click the first image to watch the video.
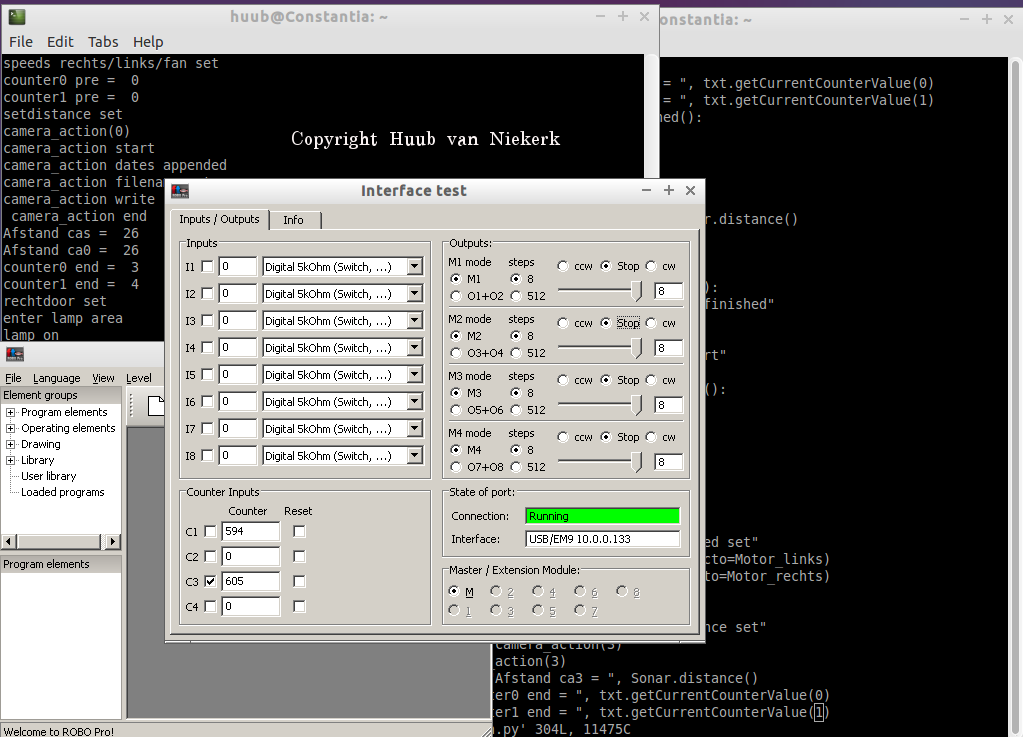
Arduino Yun: First, finding the difference between connected and available. Then, what does a keyboard have to do with it? Why not a switch? Then, does the difference between an integer and a character really makes a difference? At least something seems to work, finally. Click the first image to watch the video.
Mirft2: Testing counters again, starting with ROBOPro followed by ftrobopy. Just with the Discovery: remarkable differences, assuming that I'm not doing something wrong. Too bad I've had no technical feedback yet. Click the first image to watch the video.
Compilation: I created a short compilation of the 2009 fischertechnik convention in Erbes-Büdesheim, Germany. Click the image to watch it.
RPi1: Pulse-width should indicate a frequency and voltage. But why doesn't that show on the multimeter? Then, adding some electronics should improve the situation like it did with other test. But will it work? Click the first image to watch the video.
Arduino Mega2560: Looking into the code again, I think I find a solution. This leads me to review the wiring again and replace some. Why do LEDs test ok but don't work on the circuit? Weird behaviour..Then another pin goes weird. Oops.
Click the first image to watcht the video.
Hand: Because the wrist motor is pushed away from the pivot plate, I have to fix it, But how? Then, time to get the wrist motor working with software..it works, but gives me the creeps. This really needs a bi-polar switch, somehow. Click the first image to watch the video.
3 February
Website: The links on the Software page have been fixed and the page is cleaned up.
BB: Time for recoding since the sonar is gone. Will it work with the wire carriages? Last time they were pushed off the rail, so would more weight help out? Click the first image to watch the video.

RPi2/ROS: Booting the RPi2 starts with a major oops: "m: Unknown command" at boot. Fortunately, the microSD card on which everything resides is readable by the laptop. By accessing the contents I find my valuable source code: publisher and subscriber. Next action is to copy everything inside ~/catkin_ws to the server. Now, what should I do next? Reinstall the SD card? Seems the only thing I can do but will it work? Click the image to watch the video.
Discovery: Continuing with the counter, some tests and recoding. This shows some very odd results, but are they wrong? Click the image to watch the video.
Arduino Yun: First a problem: I can't connect. This turns out to be a wire problem: the LAN cable isn't there and after connecting, a reboot is needed. Then, no internet. But why? Back to code: somehow it doesn't work right, but with the console going some things get clear. Click the image to watch the video.
Mirft2: For checking the counters or pulses of the motors, I change the code. Then some surprising results come out giving doubts on the hardware, but which part? In a final test, the results are even odder. How come? Click the first image to watch the video.
RPi1: Using hard pwm turns out to be my second attempt, in a way. I have to switch to python, and install some software. Then making a choice between GPIO and RPIO? Finally, some calculation or/and conversion. Will it work? Click the first image to watch the video.
Arduino Mega2560: Checking the frequencies with the alternative method gives unexpected results. Why are the values different? Also, why the factor change? Pin 13 is a very odd case, but why? Click the first image to watch the video.
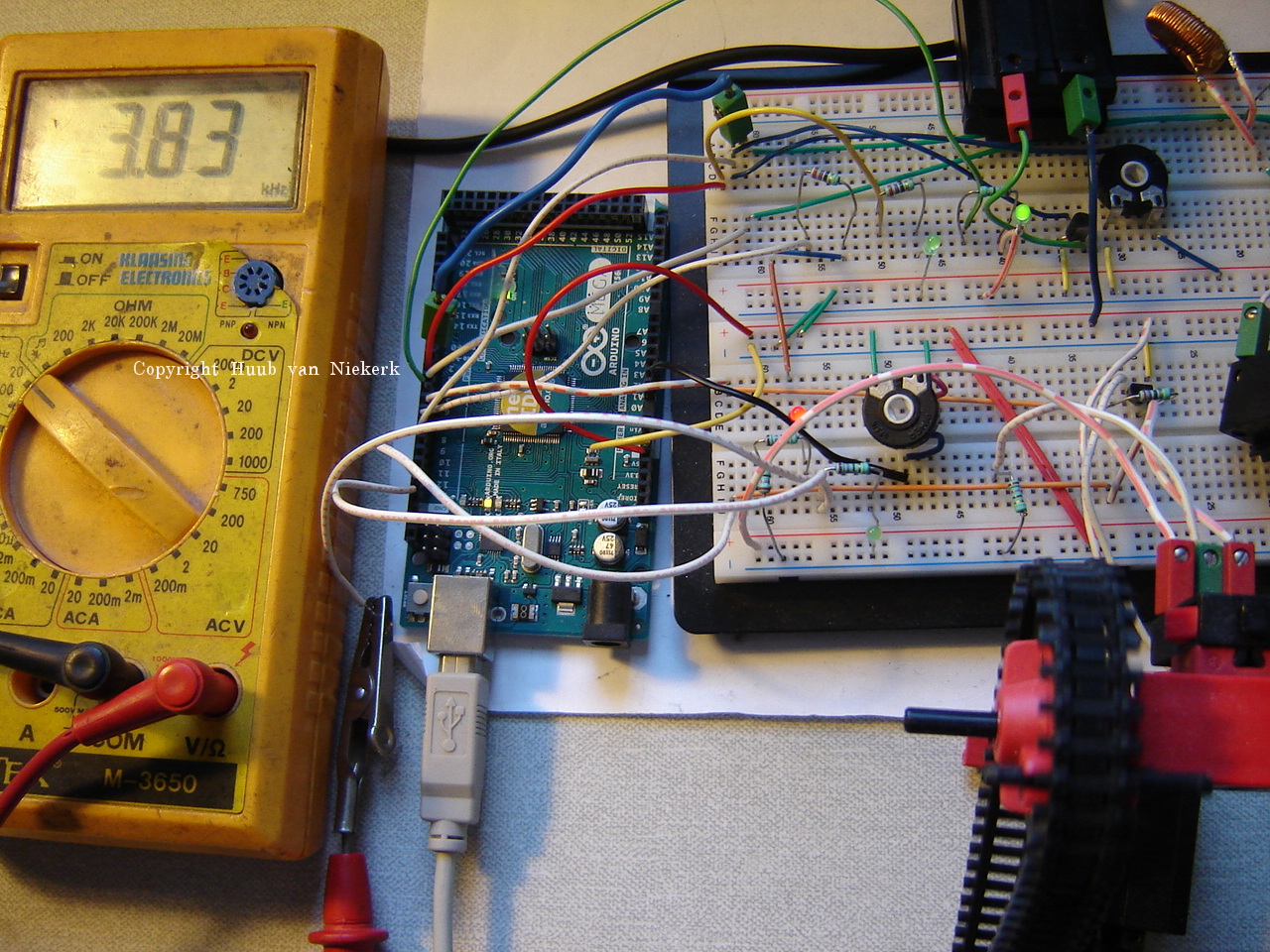
Hand: The wrist needs to be wired, but a reconstruction is necessary. After the wiring, how does it work? The diagnostics reveals a 2 problems. How to solve those? Click the first image to watch the video.
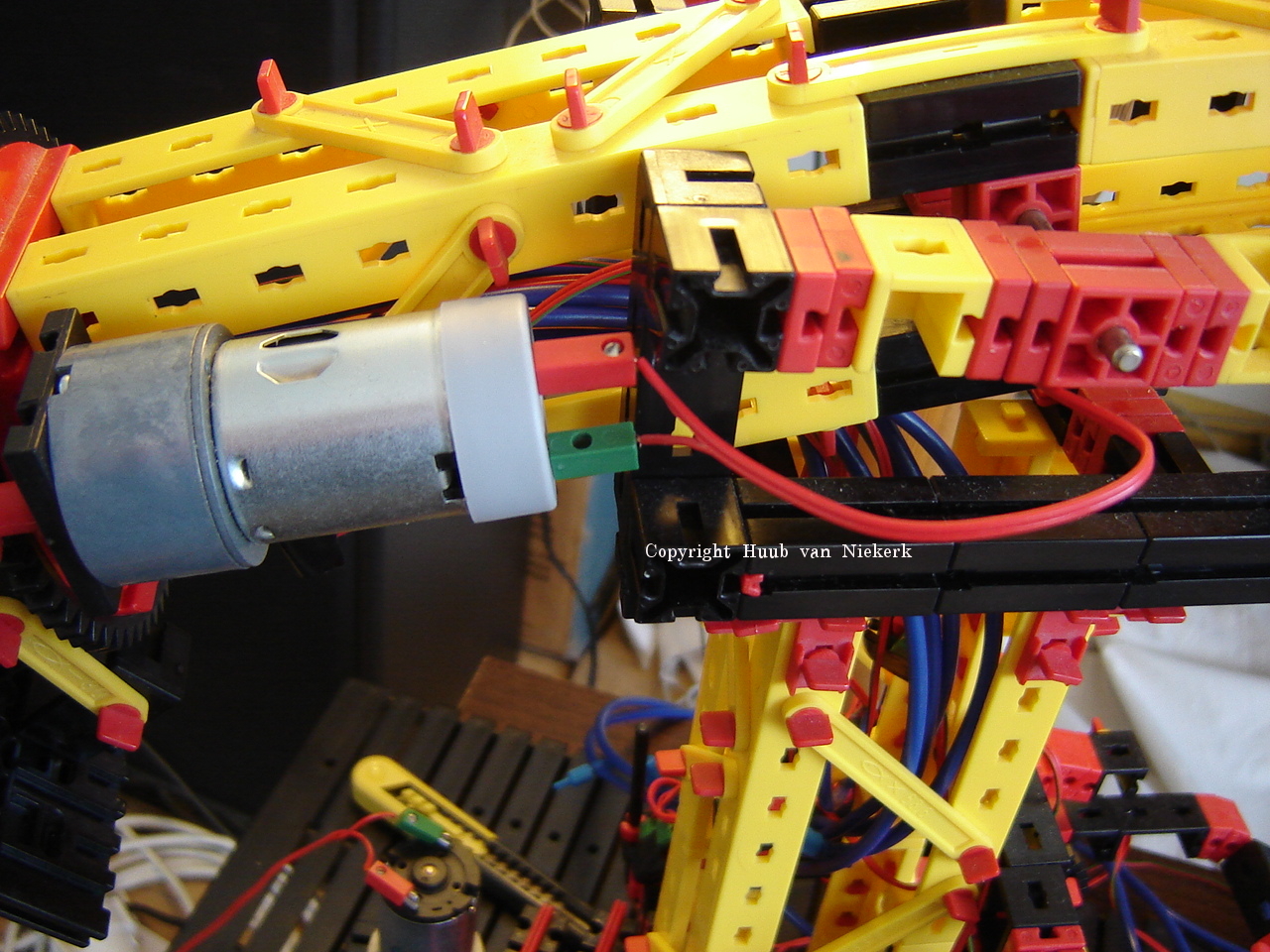
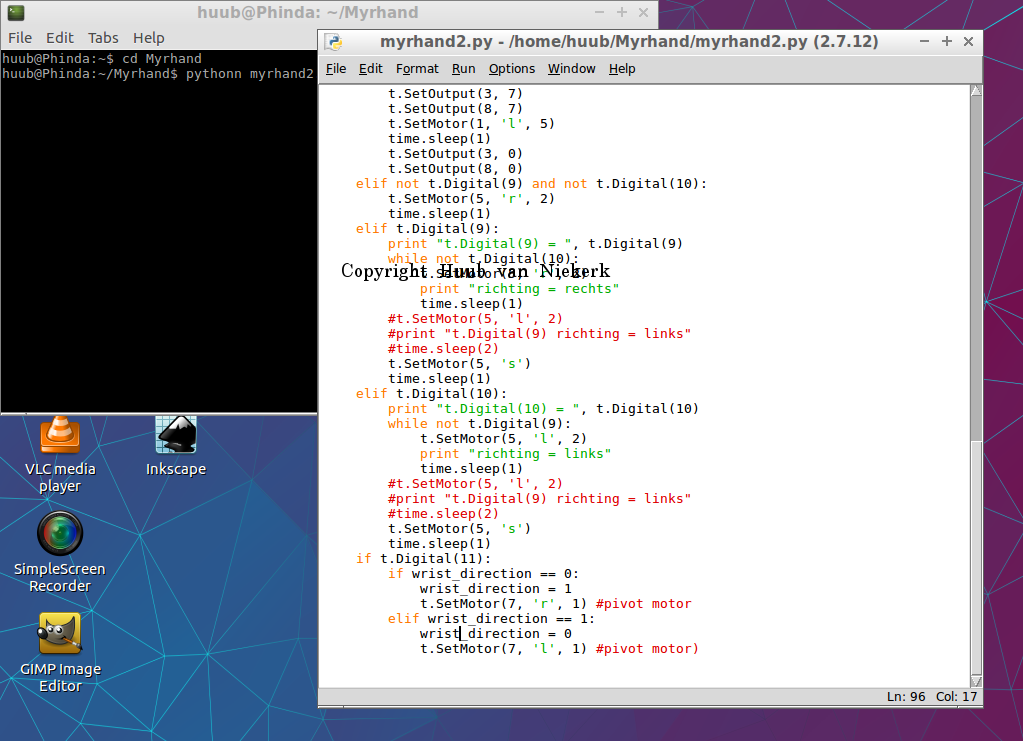
27 January
BB: Back to wiring issues: how to solve it? This leads to new ideas and reconstruction. Will they work out? Click the image to watch the video.
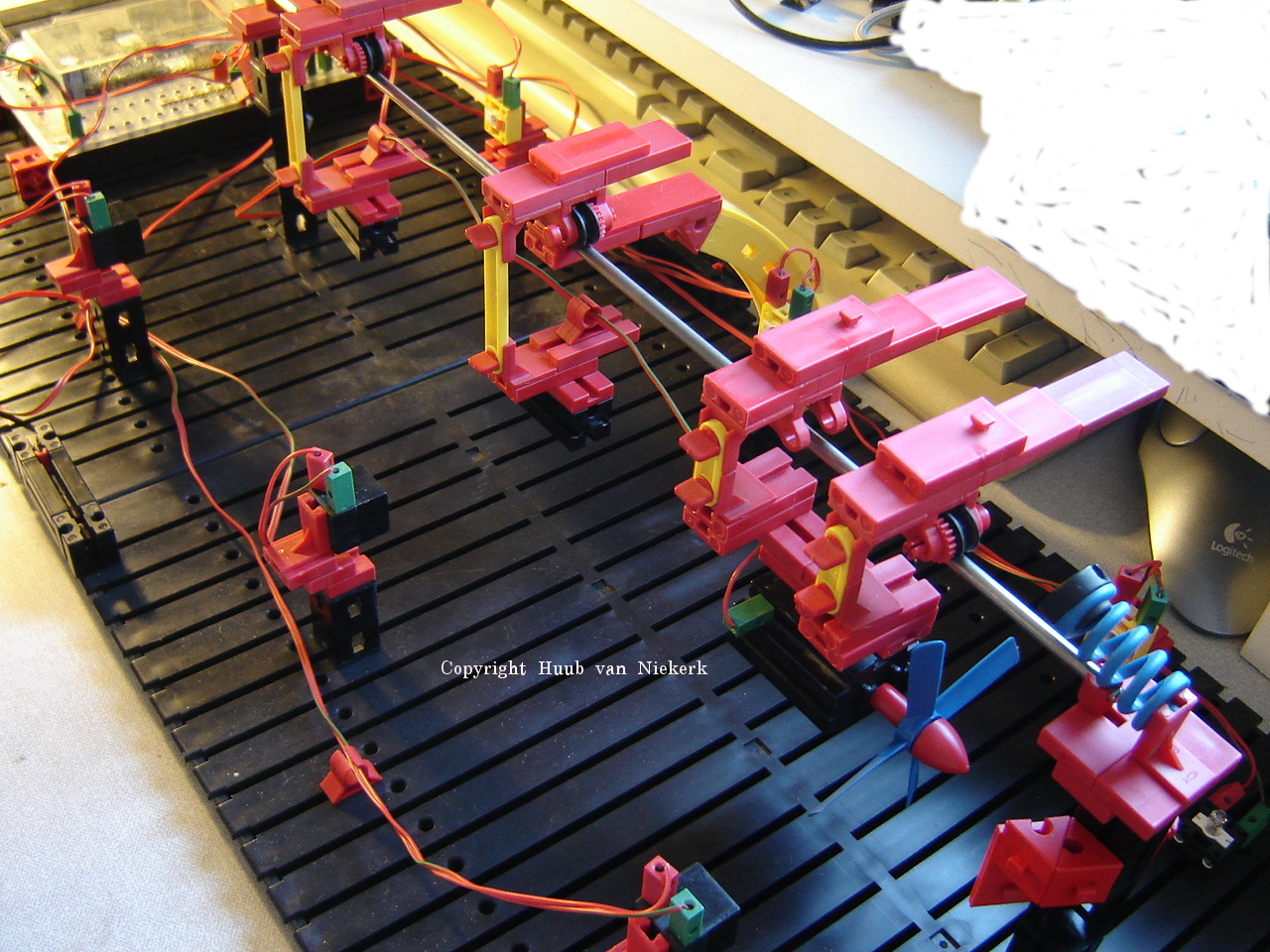
RPi2/ROS: Examining the code leads to changes: using switch input, separation of both data. But also some odd behaviour. And then there's a motor... Click the image to watch the video.
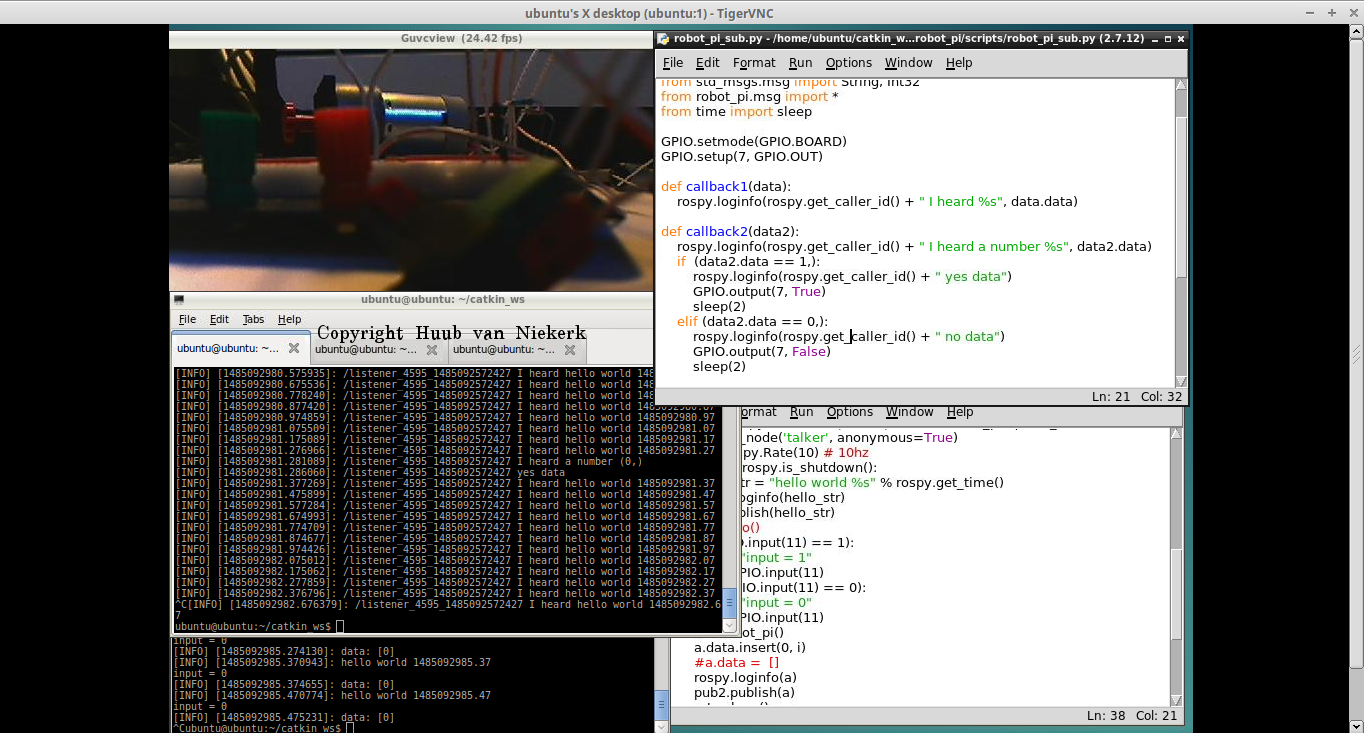
Discovery: So the pulse count seems to be an issue. After some recoding and re-thinking, I decide to make the screen output more clear, which leads to some odd finding. Click the image to watch the video.
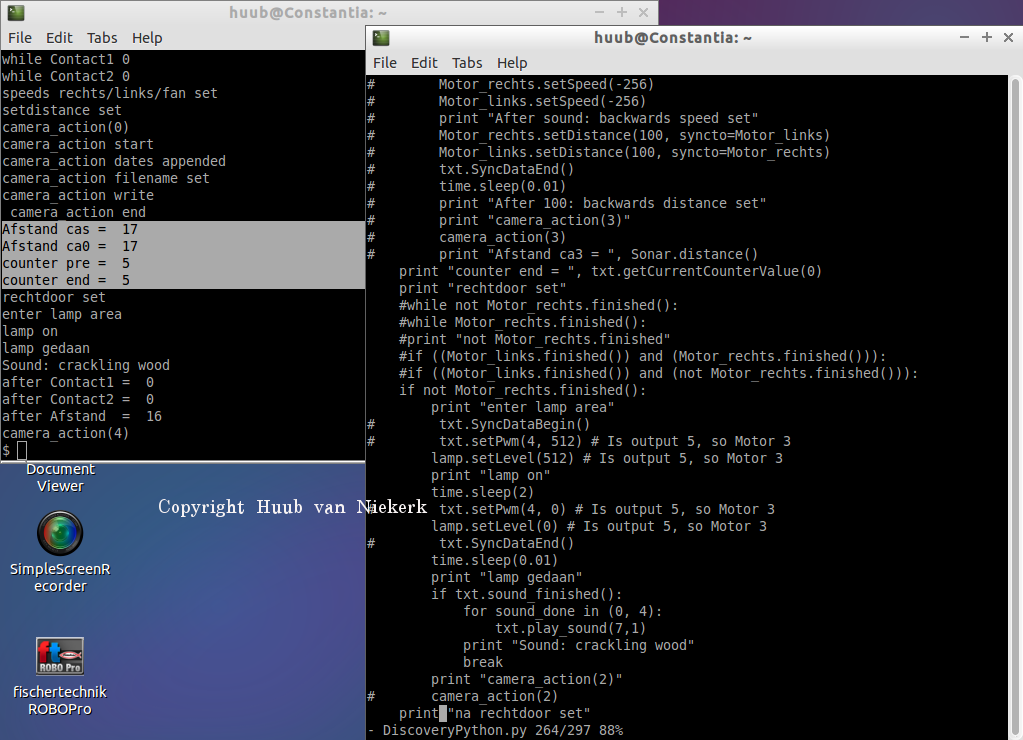
Arduino Yun: First I try the wired USB connection, then back to Wifi and finding how to add it to my own network. Next, the serial monitor, which isn't serial and needs some code. But does it work? Click the first image to watch the video.
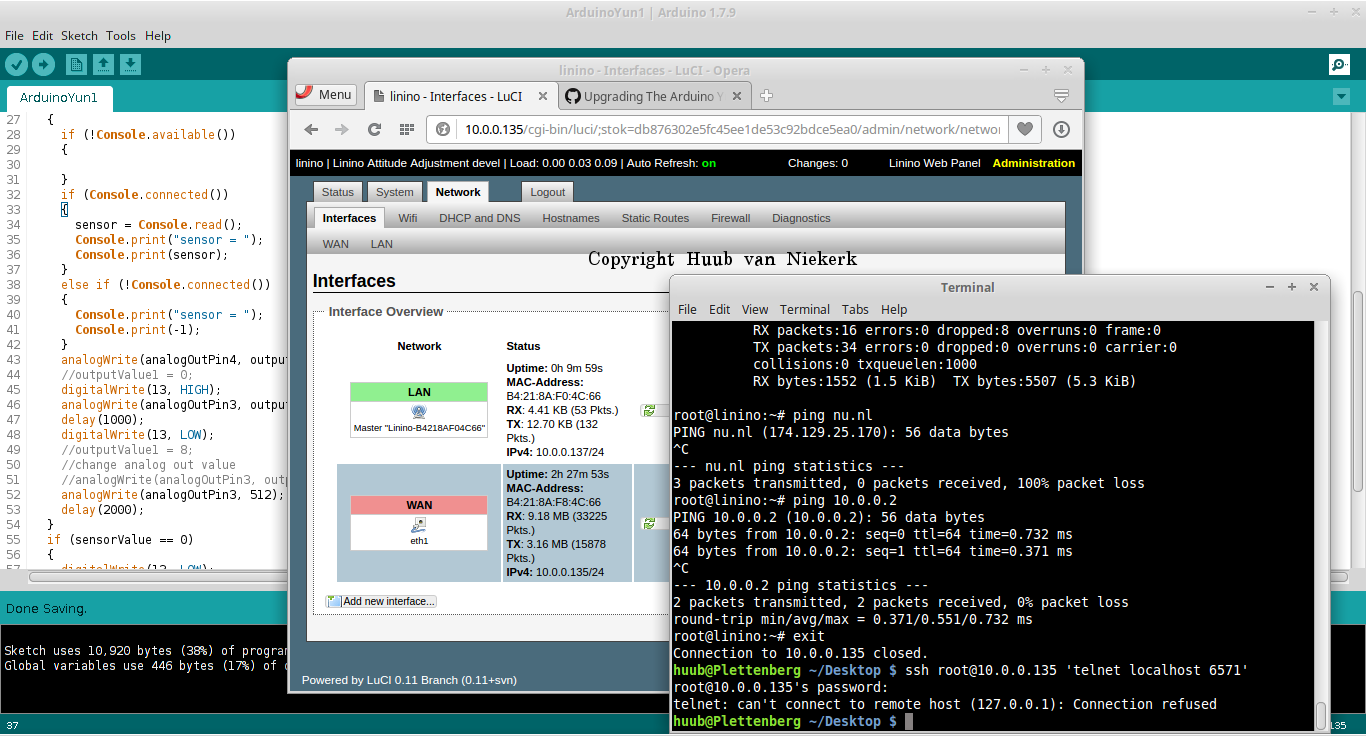
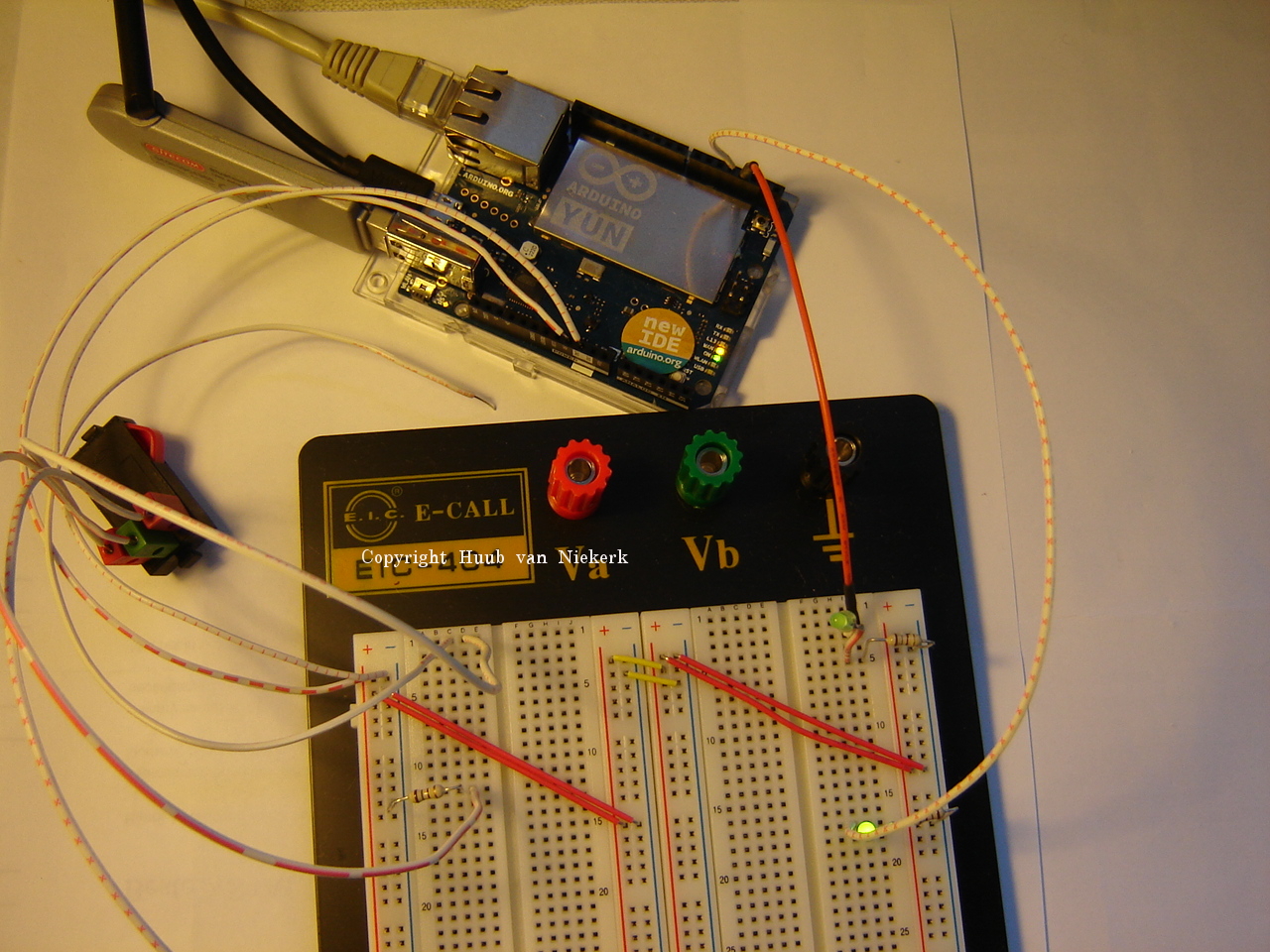
Mirft2: Looking at the gears there's 1 part on both sides that needs improvement and another that maybe can't be improved. So how to go on? Does the code need a change? Click the first image to watch the video.
RPi: Pwm testing keeps revealing odd and possibly contradicting results: the motor doesn't work and the LED works. Then some new searching reveals a solution: soft vs. hard pwm (RPIO.PWM?). Click the first image to watch the video.
Arduino Mega2560: Since pin 4 and 13 don't match in frequency, it's time to find out more using a different way in code. This shows something is wrong, but can it be corrected? And how about the desired 40-120 Hz range? Click the first image to watch the video.
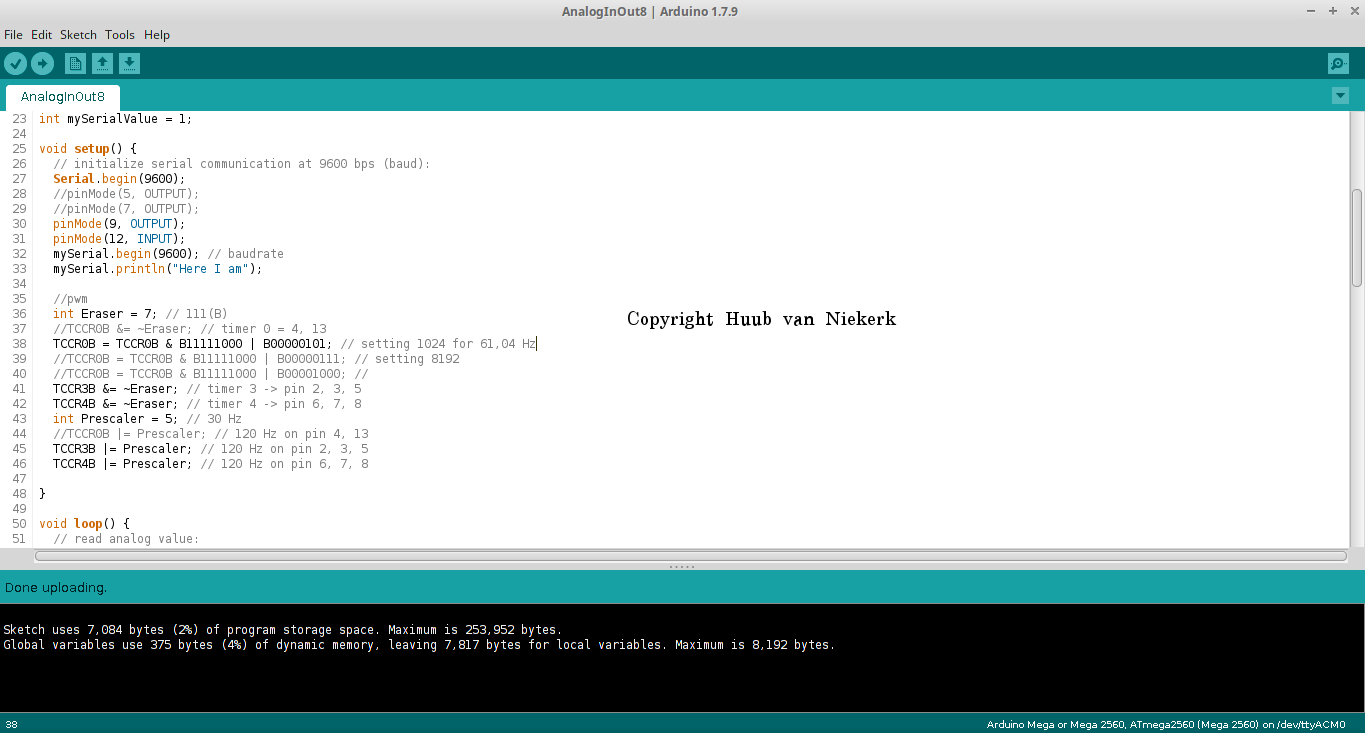
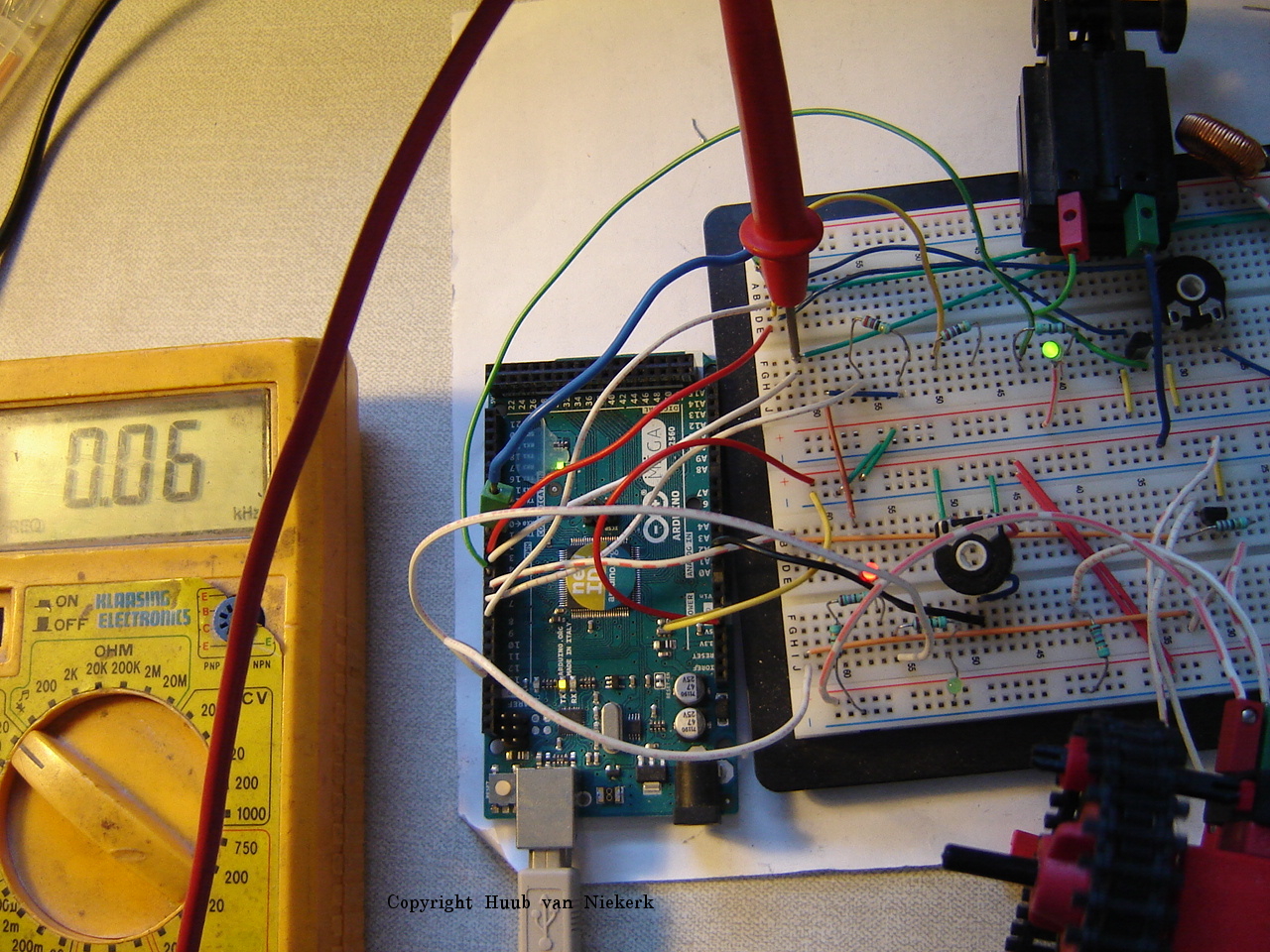
Hand: Time for the wrist motor: which one to use, where to put it and how to wire it? Does it take yet another reconstruction? Click the image to watch the video.
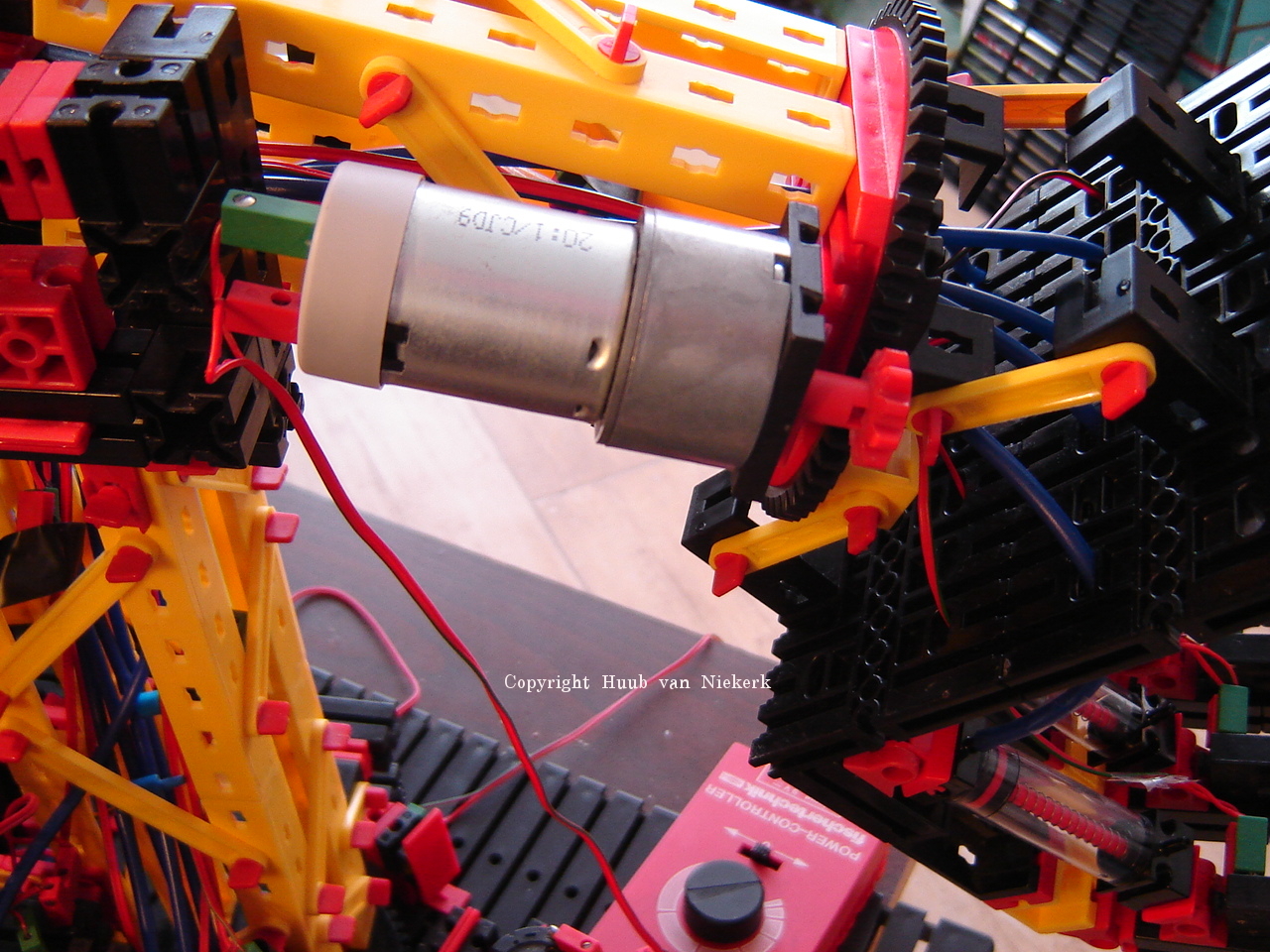
20 January
BB: Adding a wire-carriage for smooth movement, does that work? Adding 1 or 2 springs to prevent bumping, will that work? Some oops, unexpected results and conclusions. Click the image to watch the video.
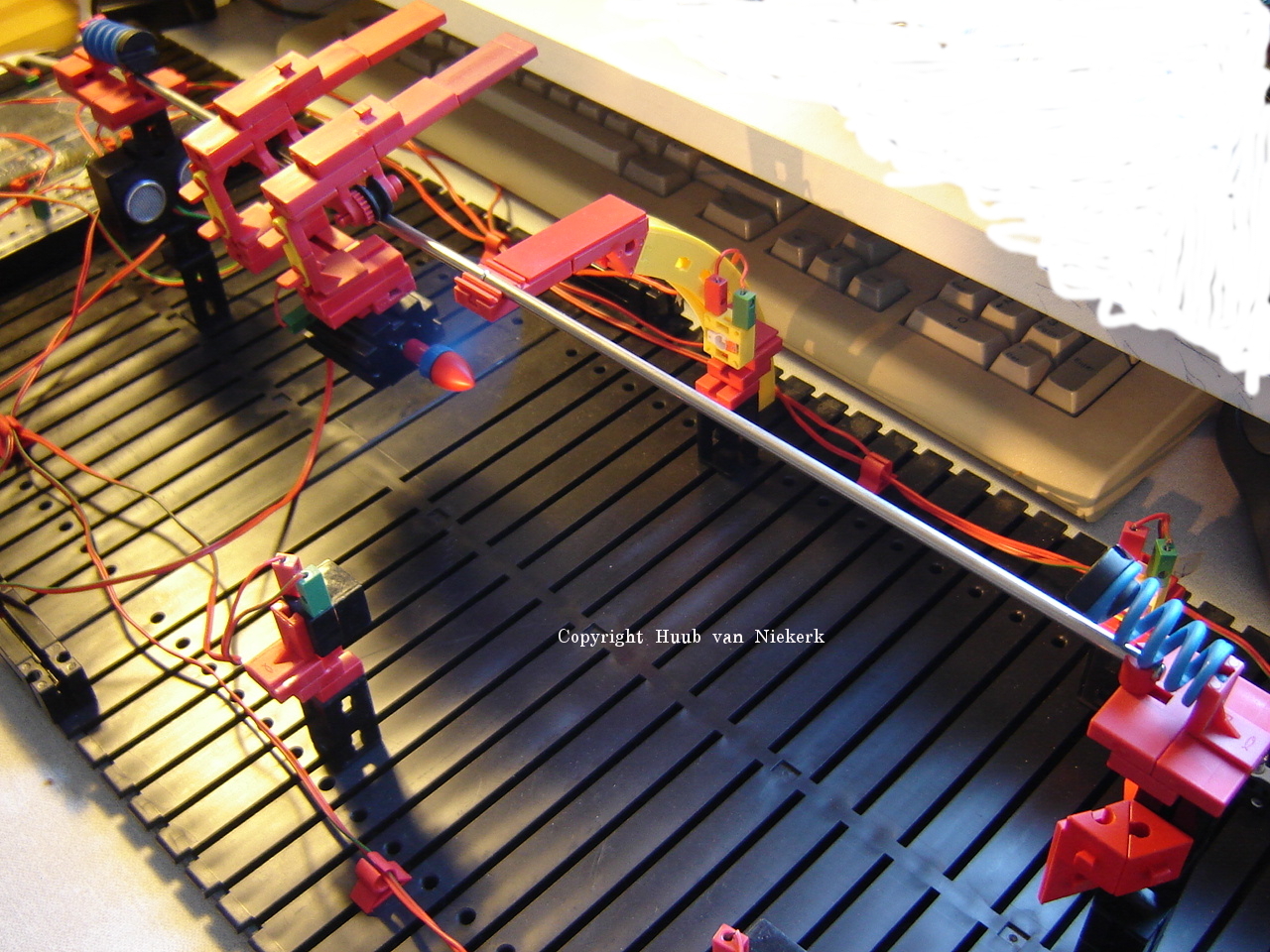
RPi2/ROS: Trying to use ROS and the GPIO at the same time takes quite an effort. Then, making the switch do what it should do, takes additional electronics. Showing it all on in-screen video, requires 1 more step. Click the first image to watch the video.
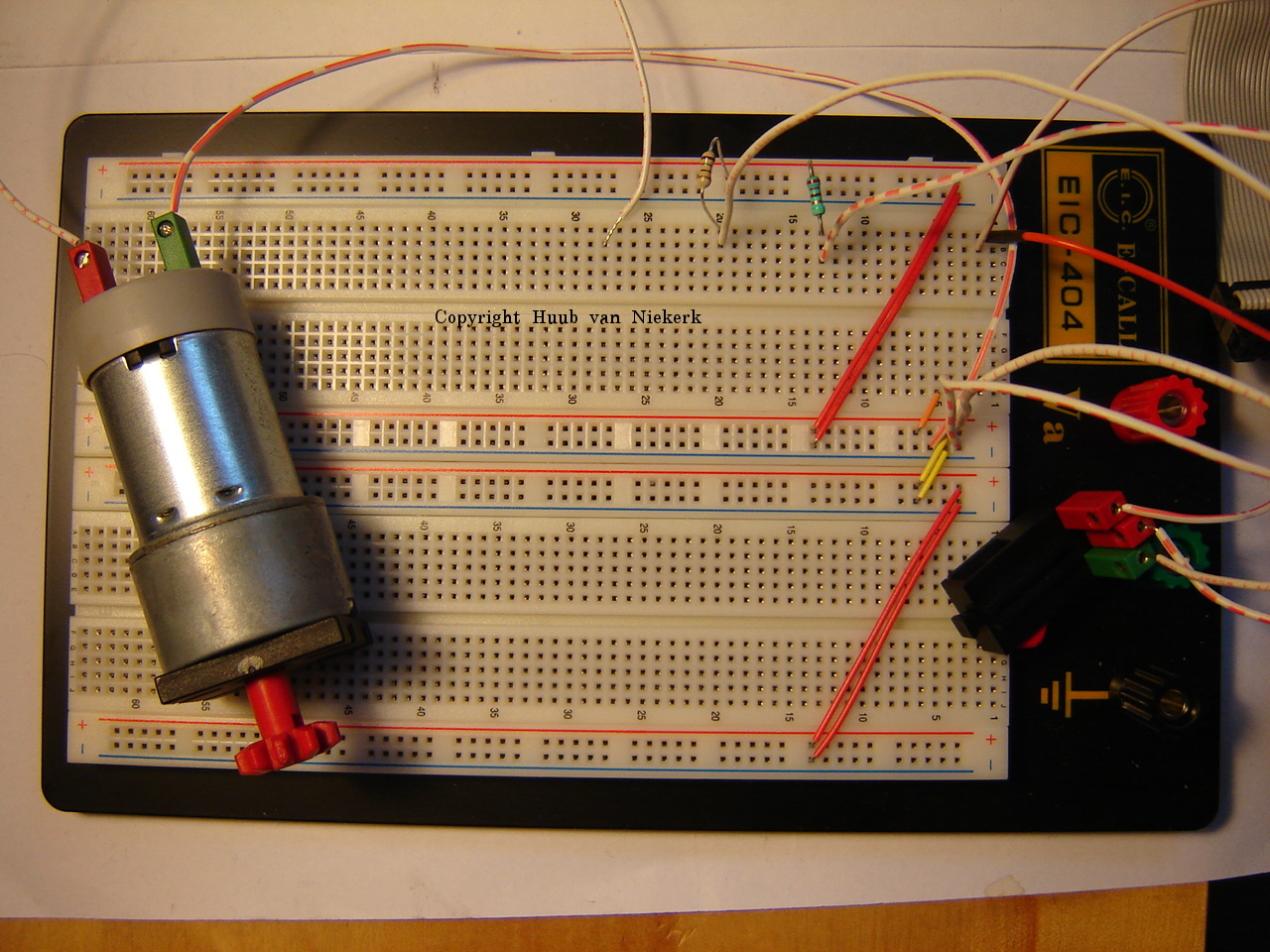
Discovery: Sound and motor tests again on both firmwares as well as ROBOPro. This reveals a surprising problem. Another problem seems to have returned: wiring. Click the first image to watch the video.

Arduino Yun: Last time, testing didn't go as well as hoped. So, it's time to rewrite some of the code and check some of the wiring. Will it work? Click the image to watch the video.
Mirft2: After the frame reconstruction, it's time for testing. However..some things aren't as they should be: gear not aligned, knots at the wrong place, teeth not fitting. After fixing(?) some testing follows. Click the first image to watch the video.
RPi: Checking on pwm only: showing way to high frequency at the lowest setting. Can I change the code? Can I change my own code? Click the first image to watch the video.
Arduino Mega2560: Measuring frequencies leads to changing the circuit a bit and inspection of the code. Then a new test casts doubts on basic information. What's right and what's wrong? Click the image to watch the video.
Hand: A pivot gear modification badly needed and this time it seems to end up fine. Except for the motor, but how to fix that? Finally, a look at the arm. Click the image to watch the video.
13 January
BB: Replacing a broken lenslamp solves 1 problem, but the carriage still doesn't do what I want. Some testing reveals the issue: recoding is needed with a nice result. Click the first image to watch the video.
RPi2/ROS: Trying to figure out how to use my own msg file and getting the GPIO to work together with ROS leads to unexpected results and questions. Click the first image to watch the video.
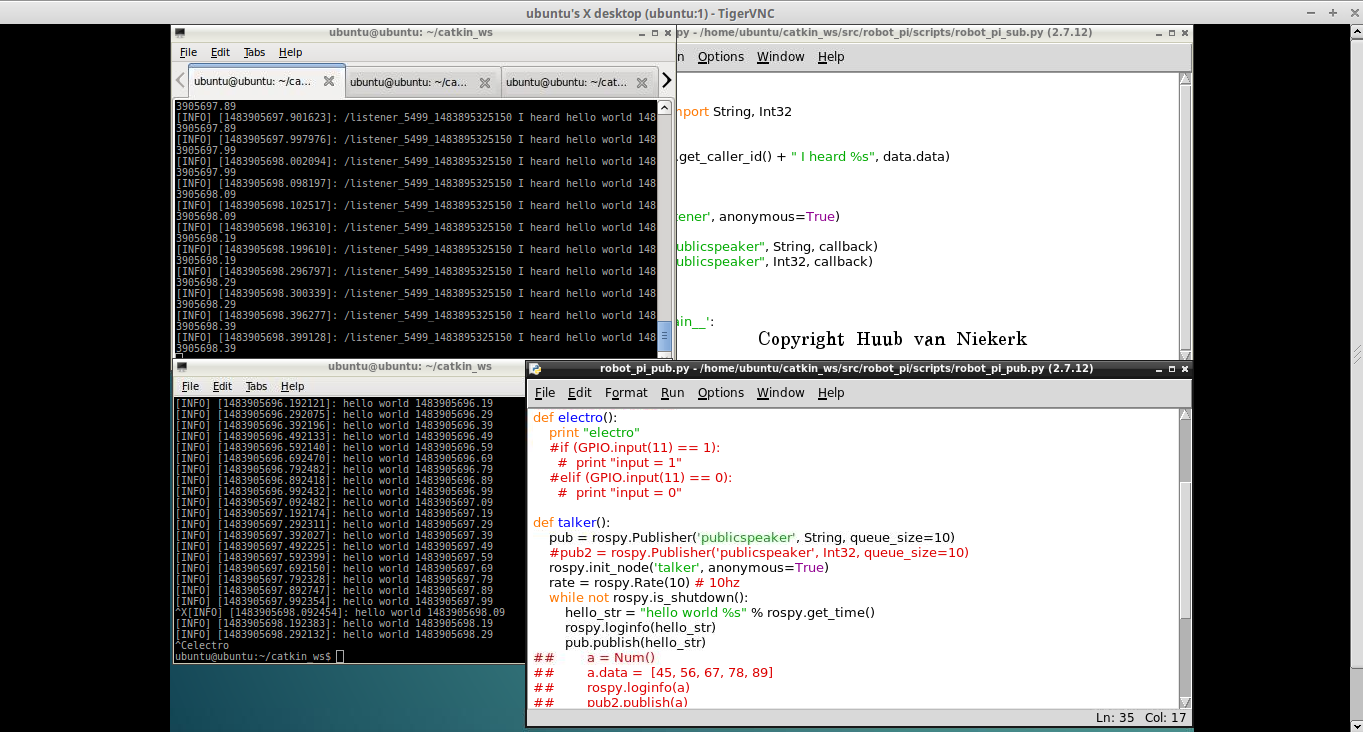
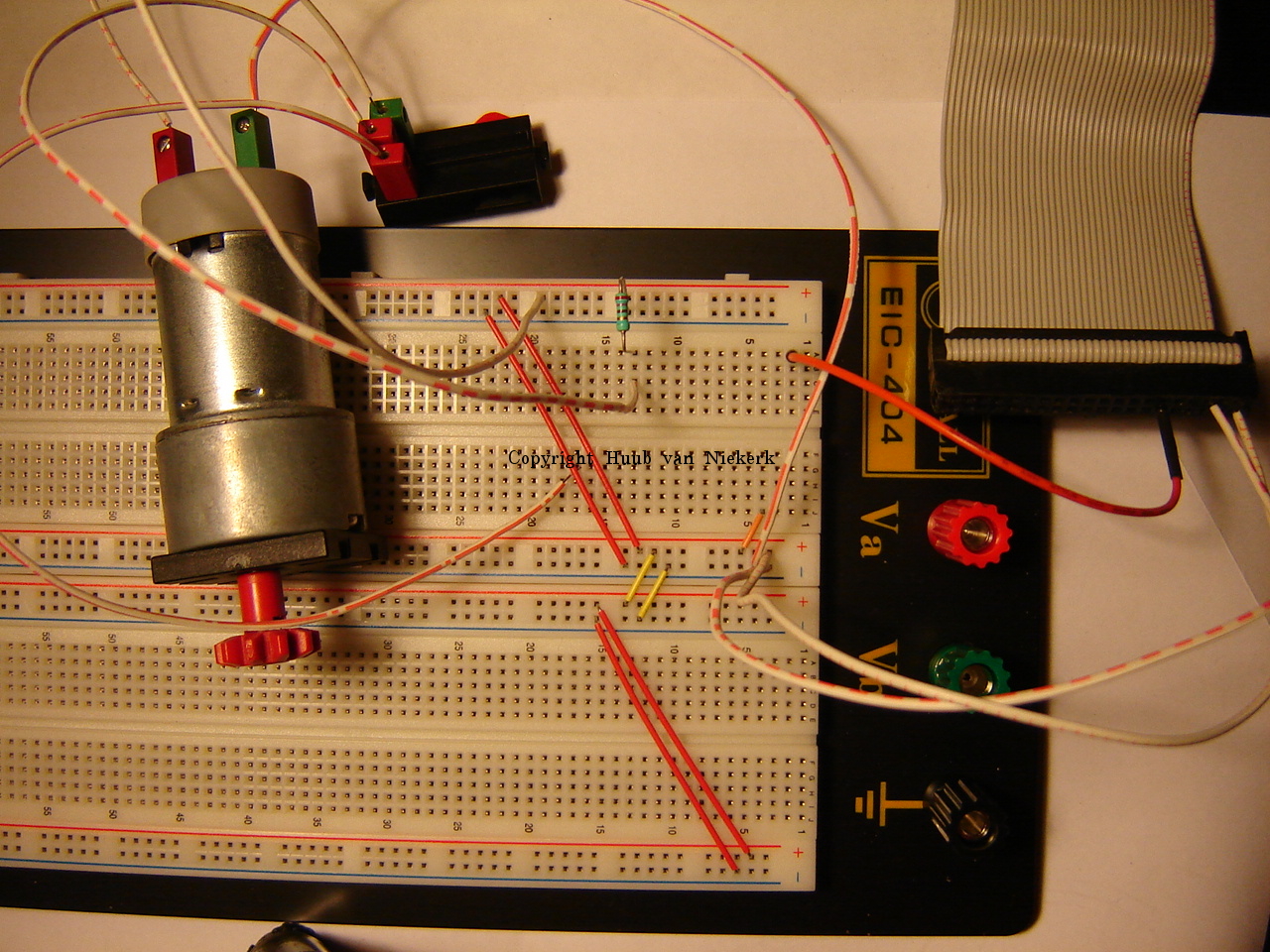
Discovery: Time to relocate the motor tests to the original firmware. Any other different (better?) behaviour? Click the first image to watch the video.
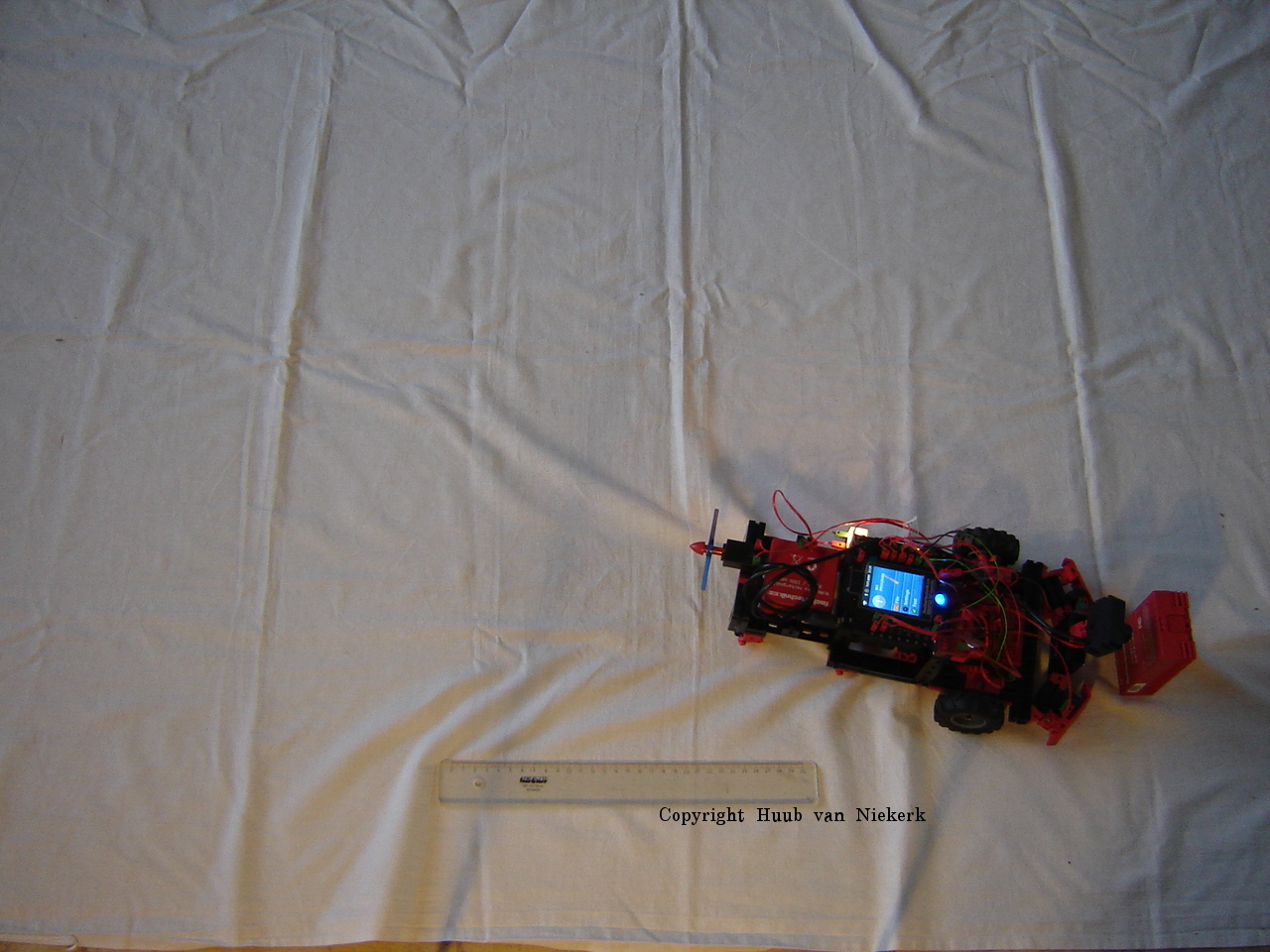
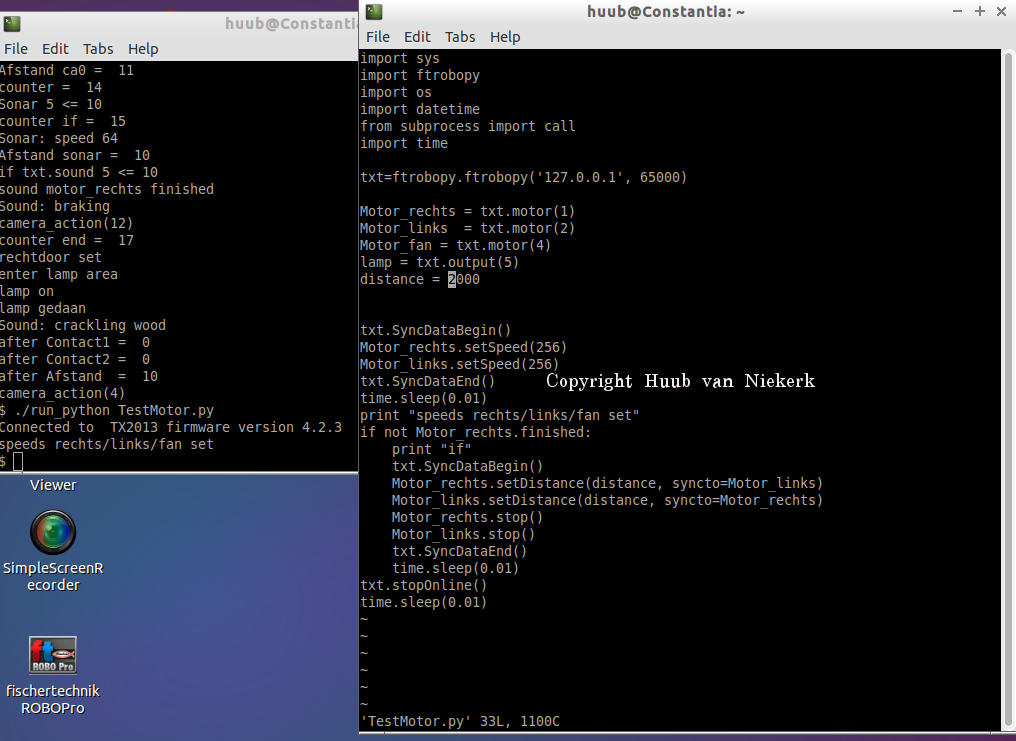
Arduino Yun: Time to connect the Yun to a breadboard and bring the circuit there. Will it work as well? Something needs to be changed, including some additional hardware. Click the first image to watch the video.
Mirft2: After doing the feet, it's time to let the gears go properly. This takes some serious reconstruction of the frame but will it work out as intended? Click the image to watch the video.
RPi: Some new attemtps to simulate pwm brings questions. Then, back to the real circuit: how does the motor work anyway? Is it really pwm controlled? Click the first image to watch the video.
Arduino Mega2560: Some more simulation gives some clarity, but in what exactly? Then back to the real circuits, with some oopsies and code changes with clear effects. Click the first image to watch the video.
Hand: Reconstruction (again!) of the pivot gears seems to go fine. Then a (final?) test reveals the real problem (oops), which leads to yet more(!) reconstruction to be done. Click the image to watch the video.
6 January
BB: Checking the code leads to some changes and testing leads to questions about wires, lamps and the interface. Click the image to watch the video.
Discovery: Considering the results of last time, some more code changes are necessary. Testing shows it doesn't really look promising. Click the image to watch the video.
RPi2/ROS: Going on with trying to publish a number meets with some hurdles: C++ isn't Python, several adjustments, and why don't examples always work out? Click the image to watch the video.
Arduino Yun: It's time to explore some more by doing some more programming and add electronics. Click the first image to watch the video.
Mirft2: A gear is not aligned anymore which shows a continuing problem. Then, feet need to be fixed and the hind legs need to be reconstructed. Click the image to watch the video.
RPi: The pwm simulation isn't yet really what it's supposed to be. Also, the motor isn't a DC motor. So things need to be redesigned. Will it work? Click the image to watch the video.
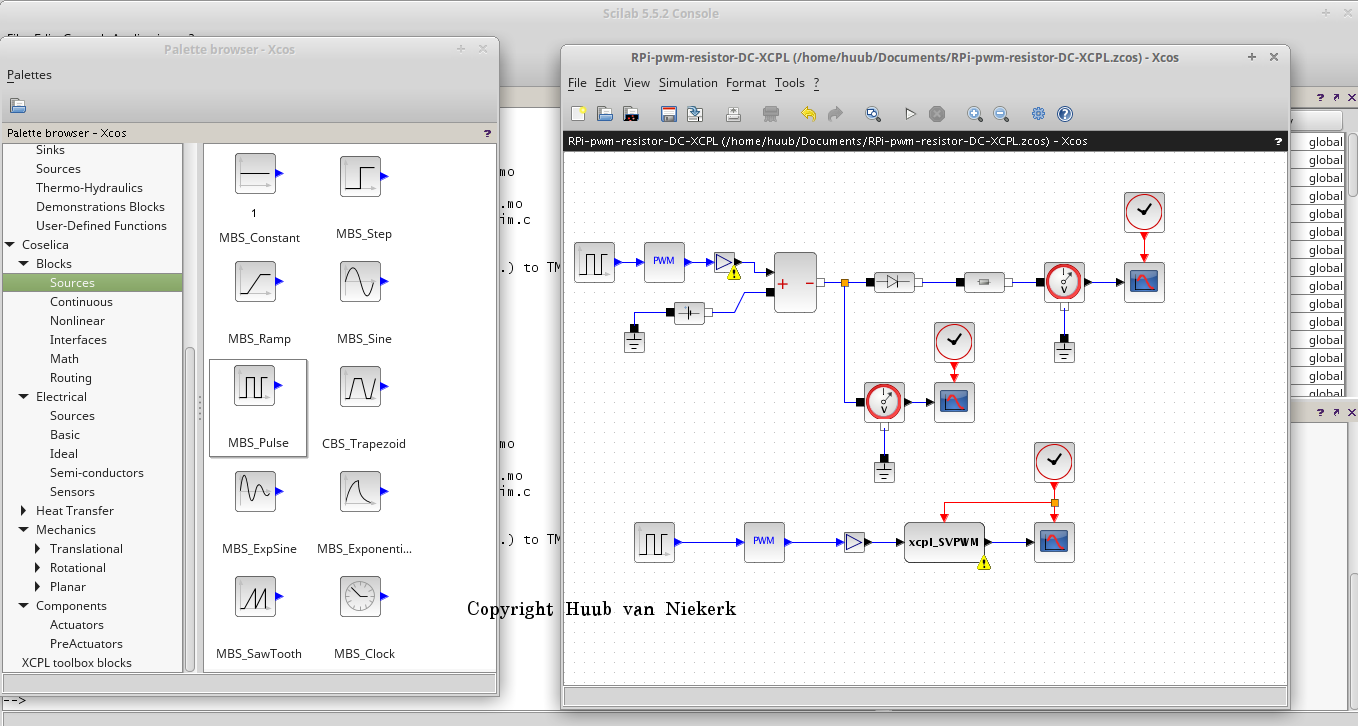
Arduino Mega2560: Improving simulation leads to unexpected results and necessary changes. How do toolboxes interact? Click the image to watch the video.
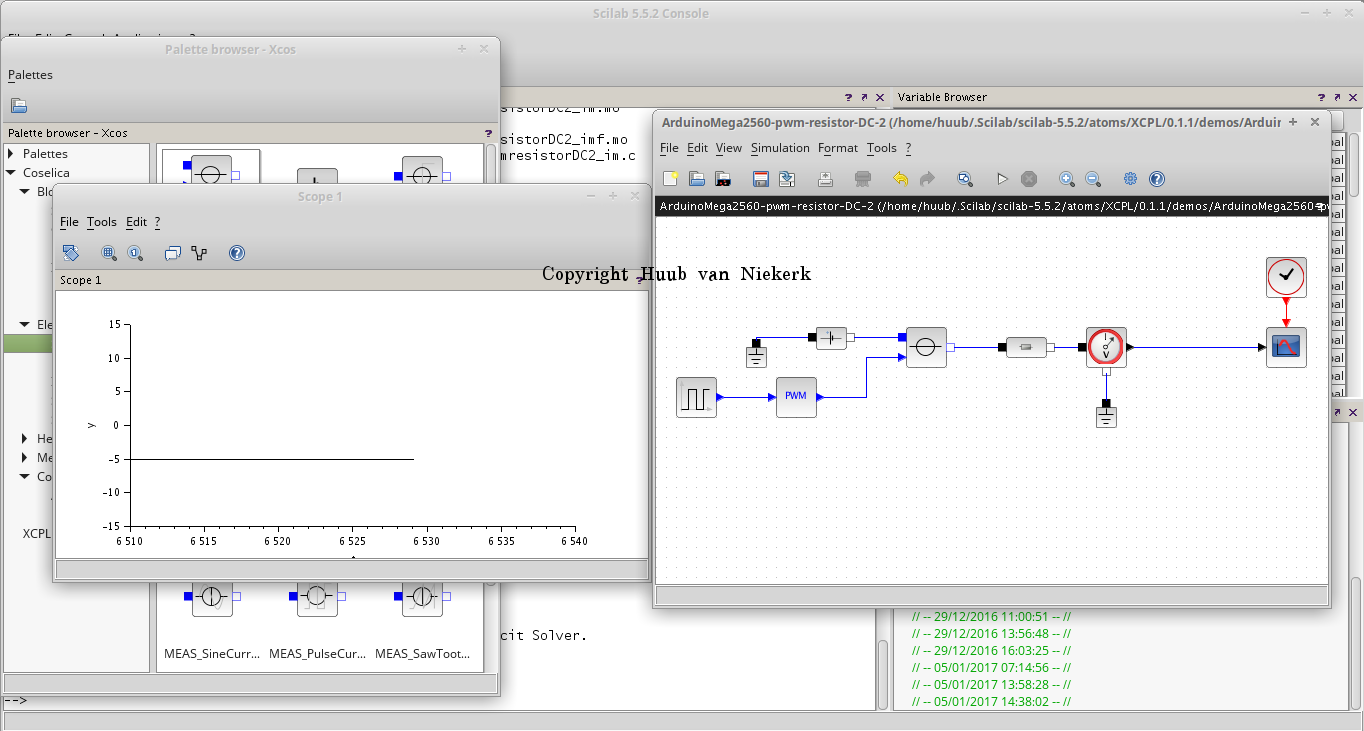
Hand: Considering the space around the wrist, I go for a slight reconstruction. Then tests show there's a wiring problem, which is solved quickly. But that's not all. Click the image to watch the video.