28 December (Playlist) Blog 303
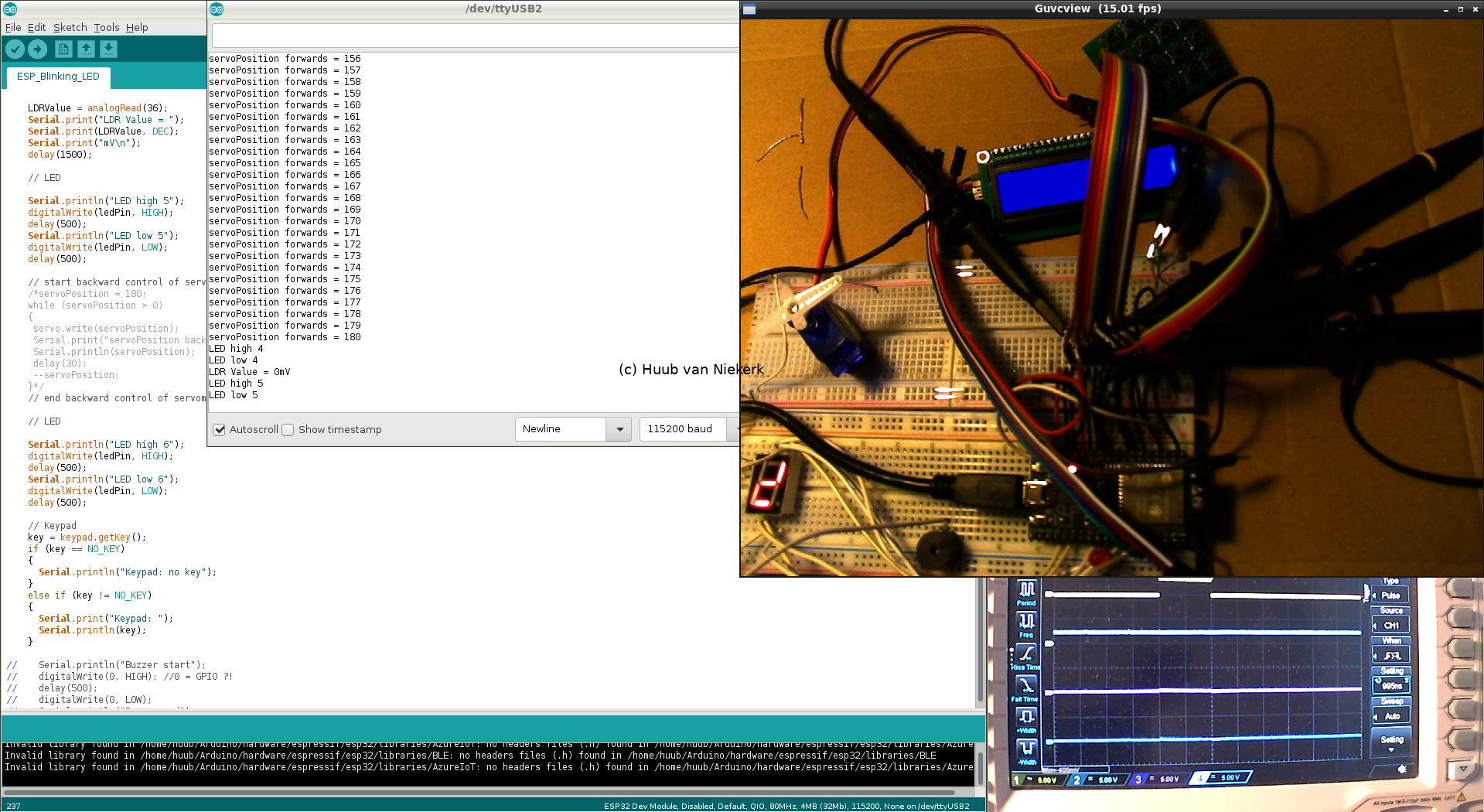
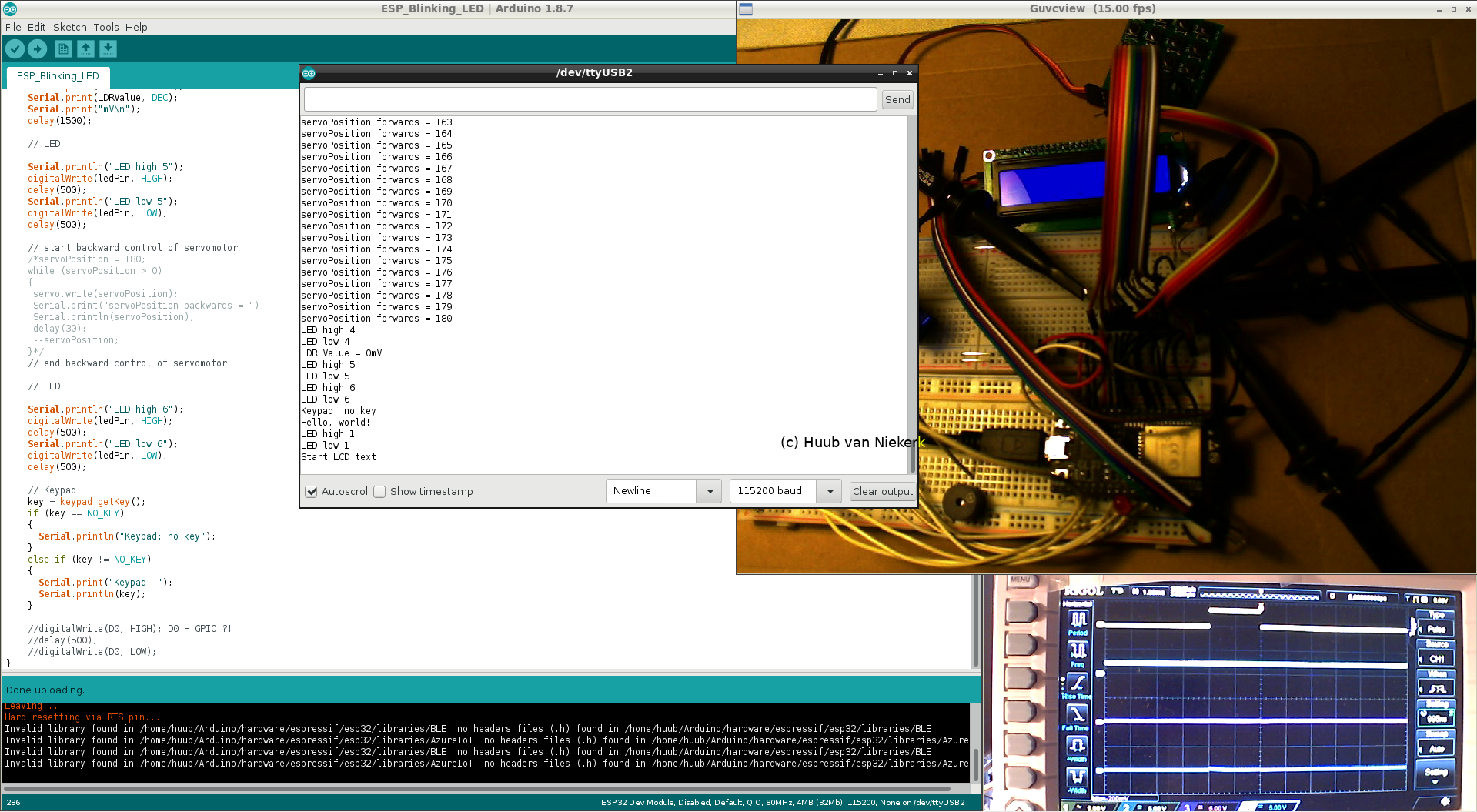
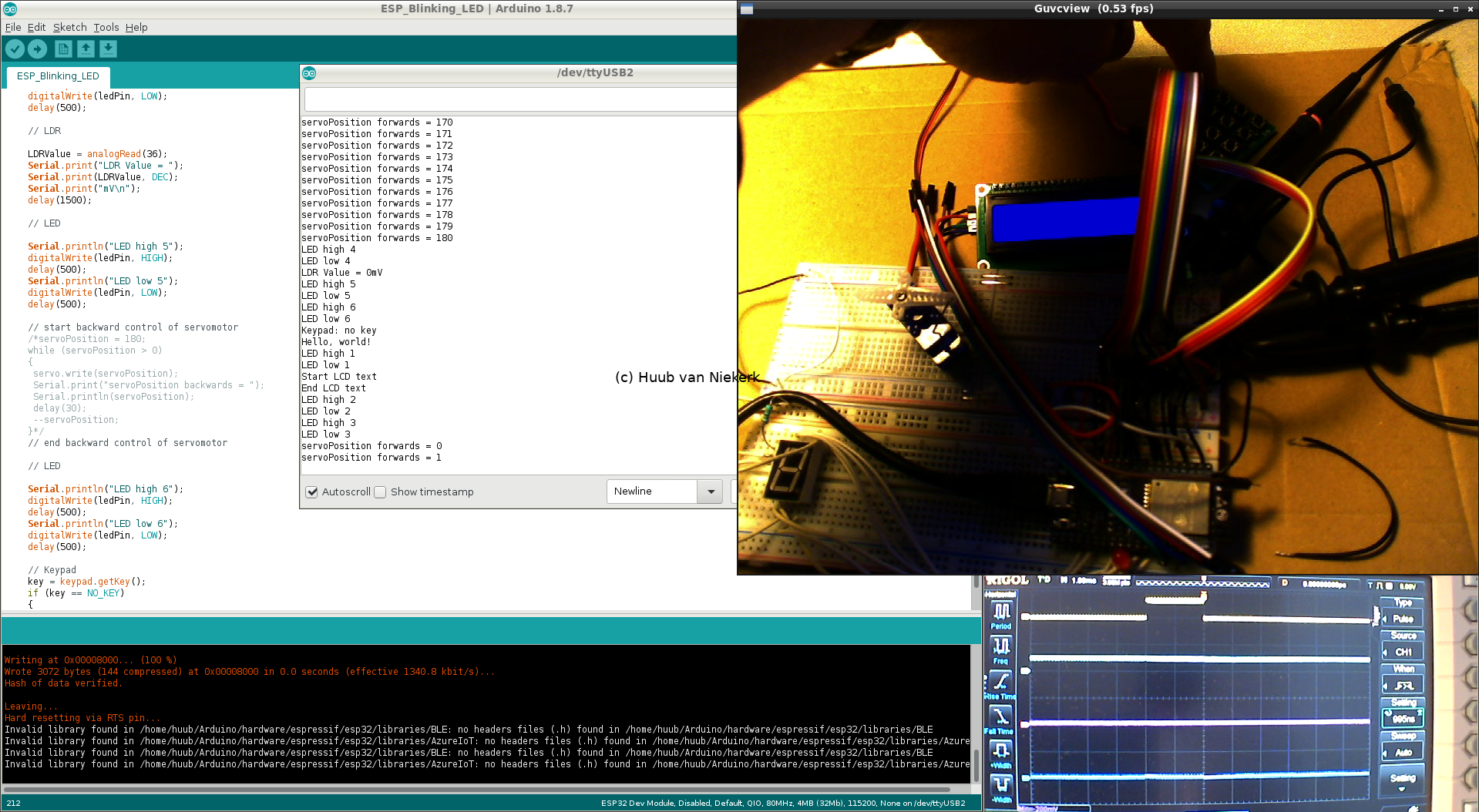
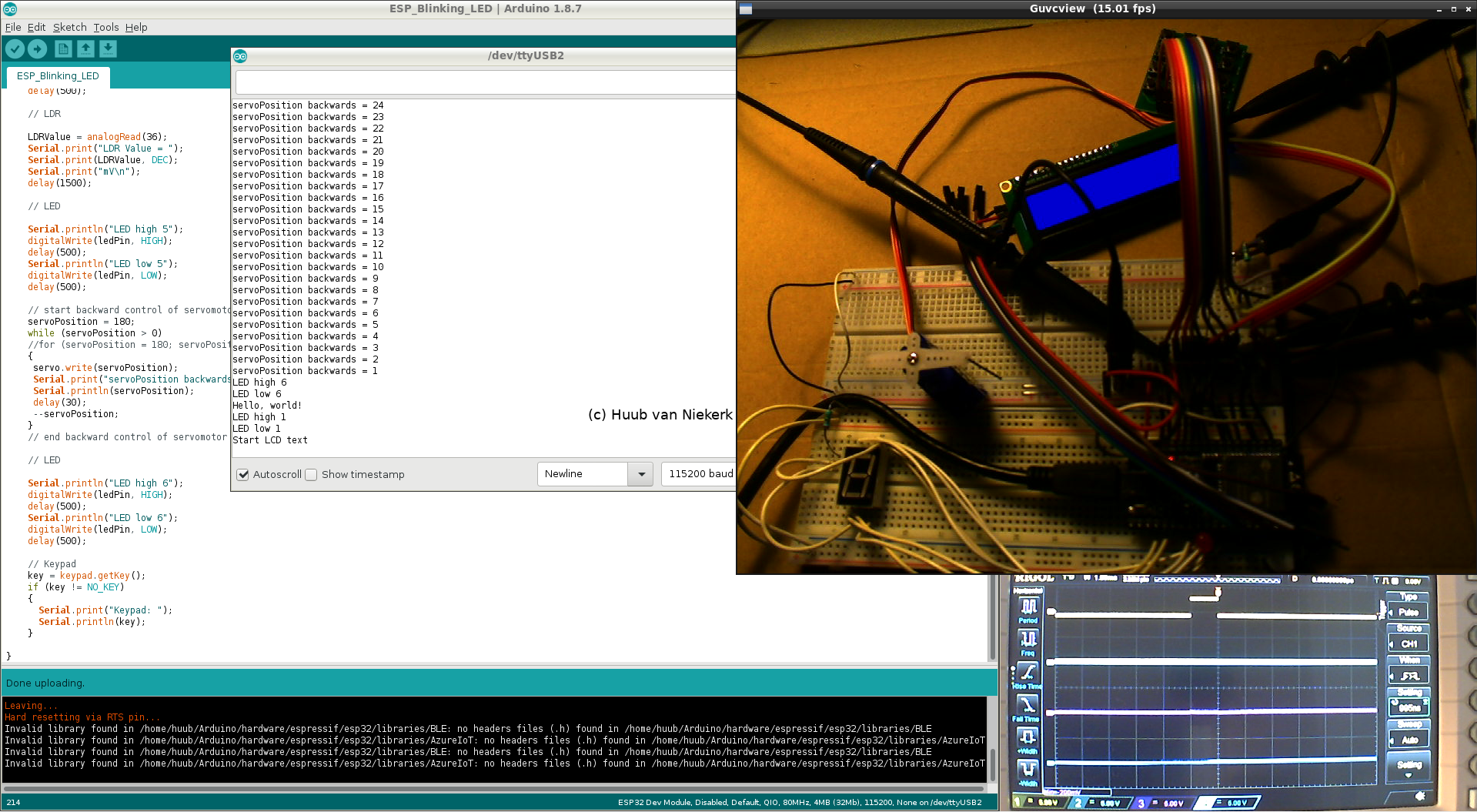
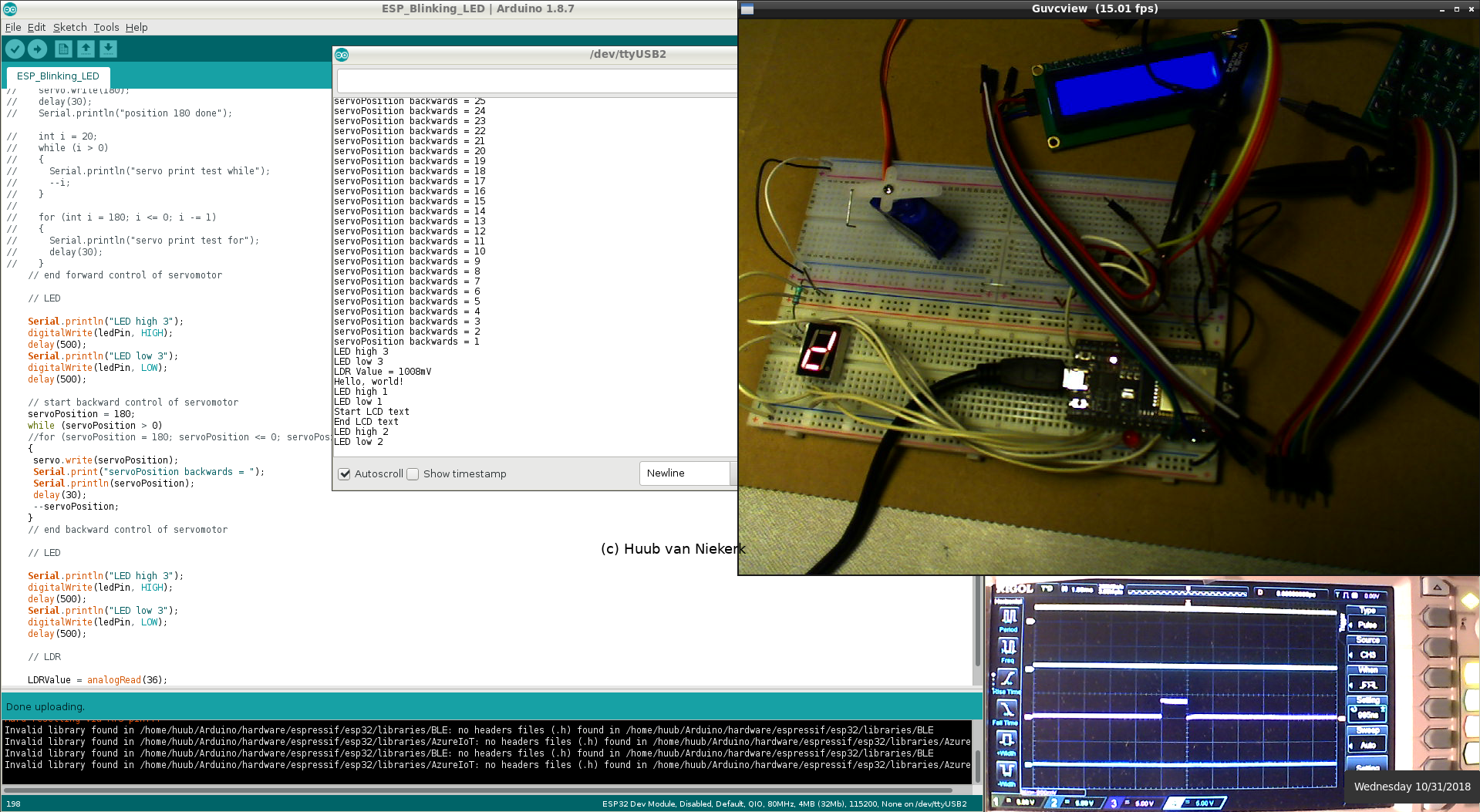
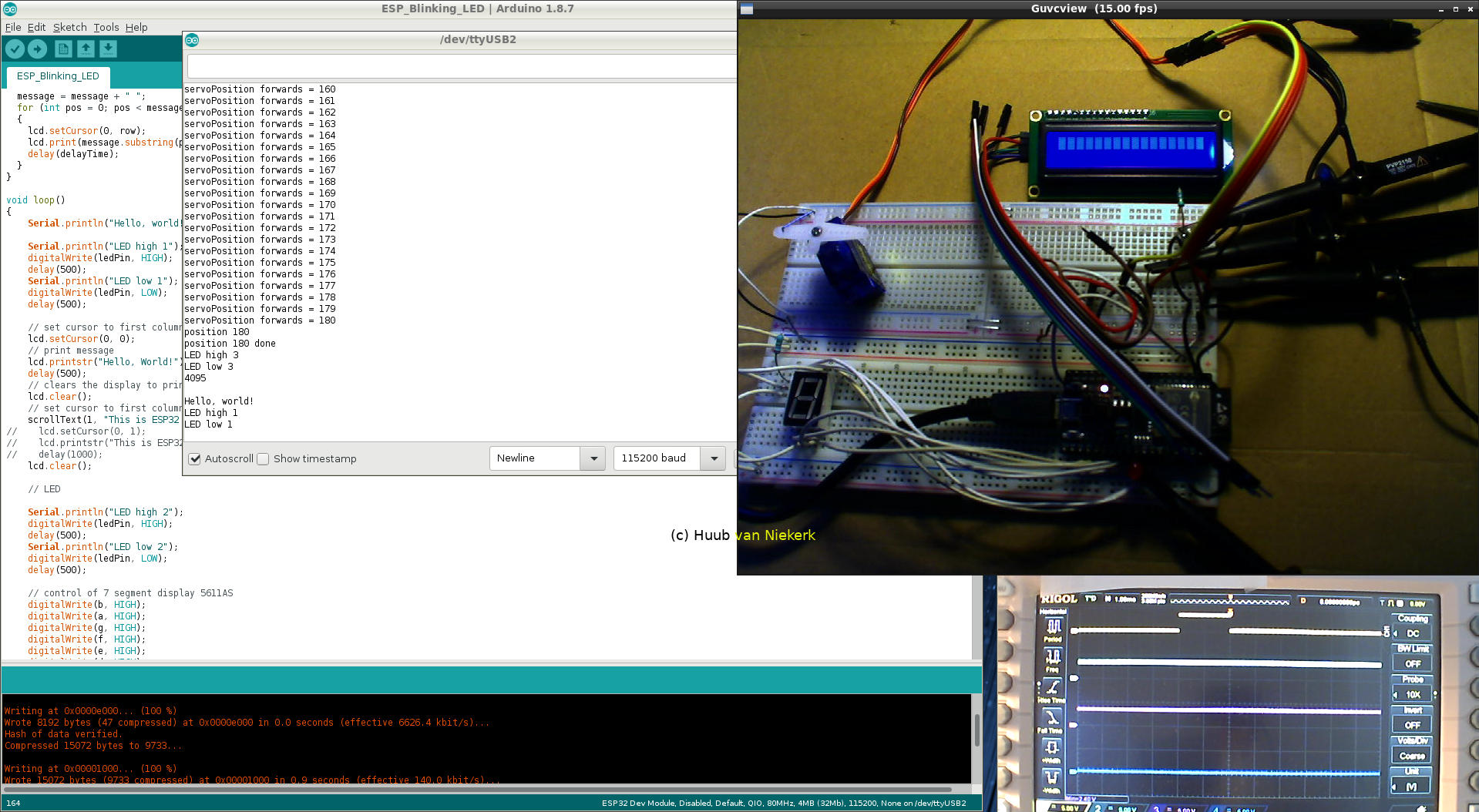
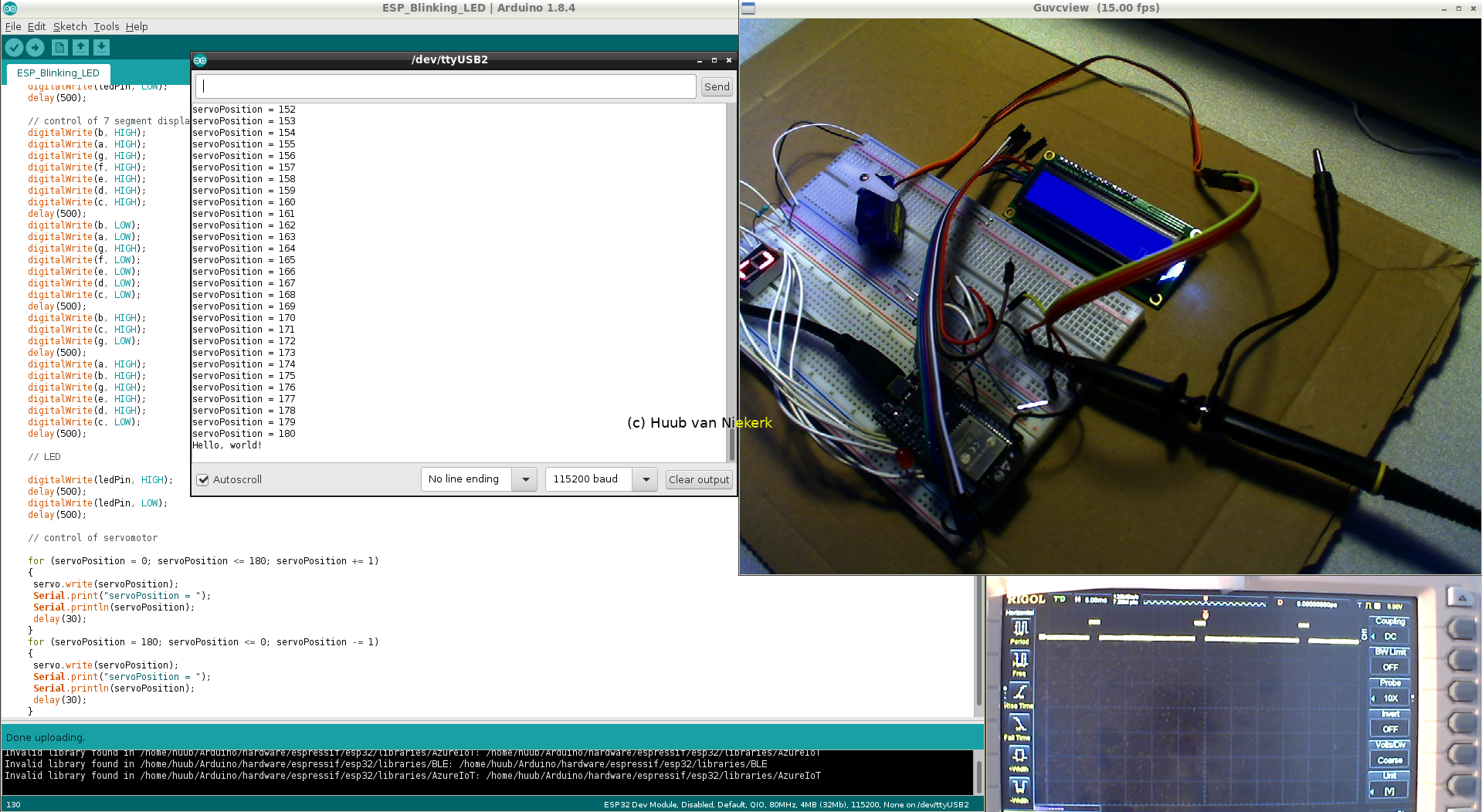
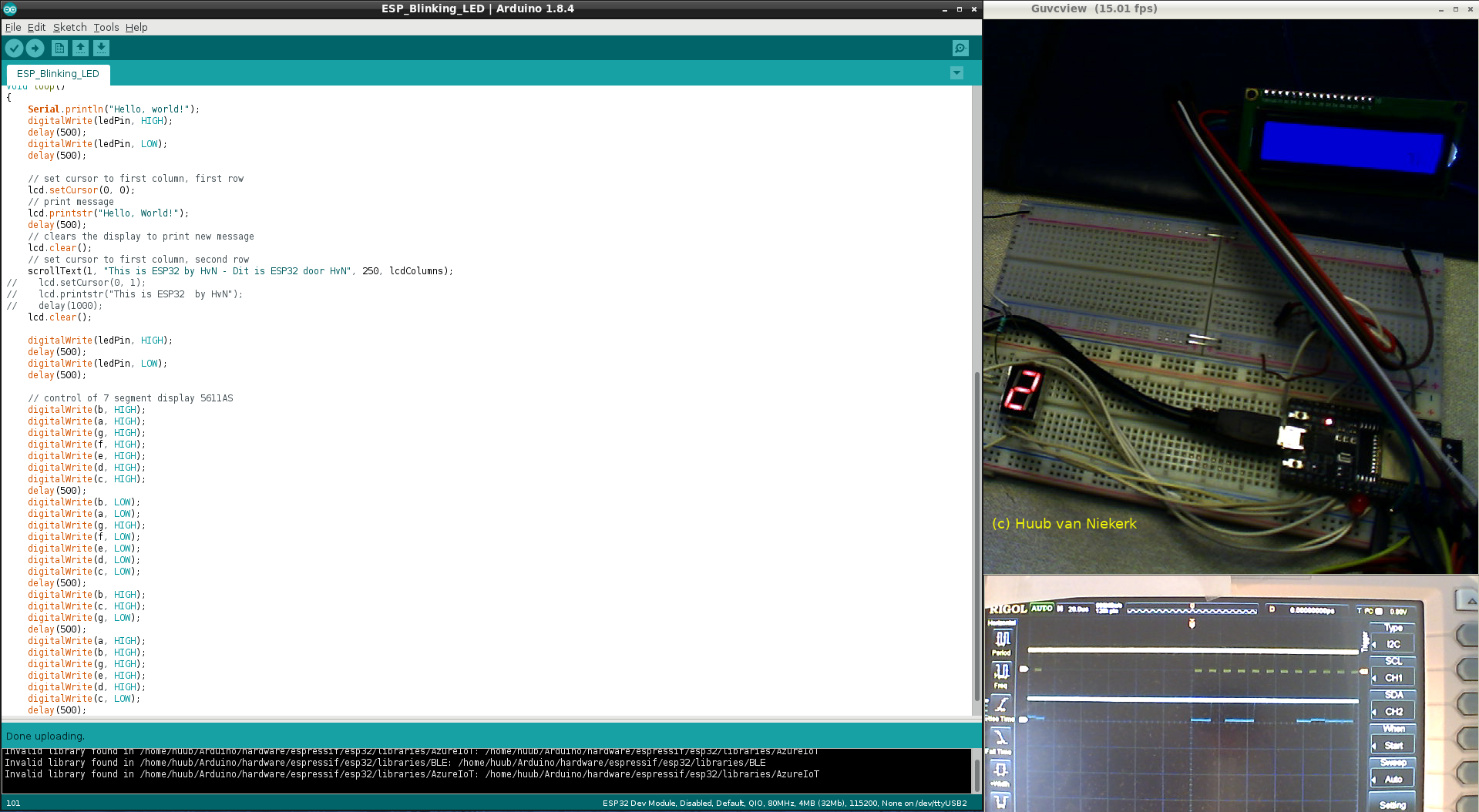
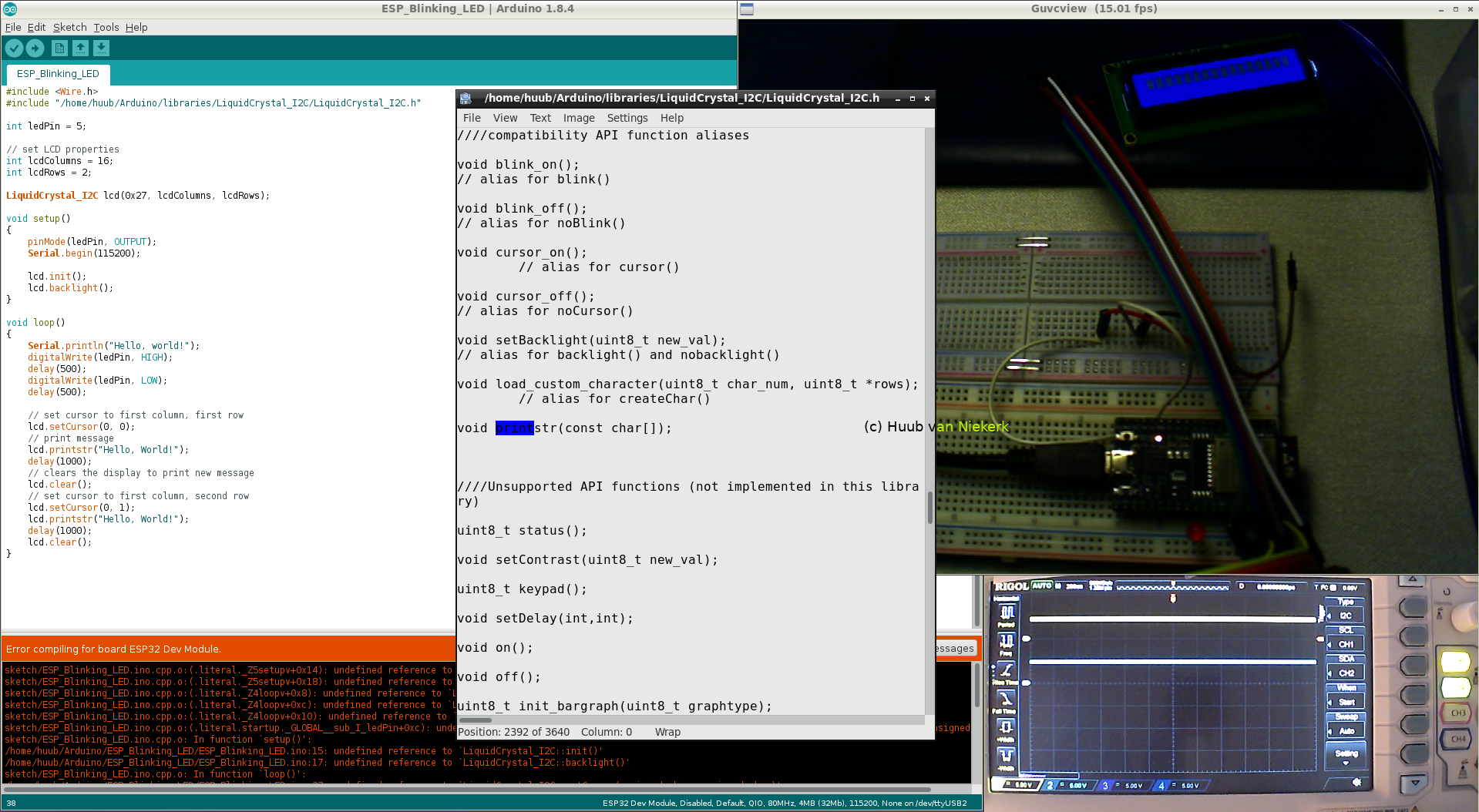
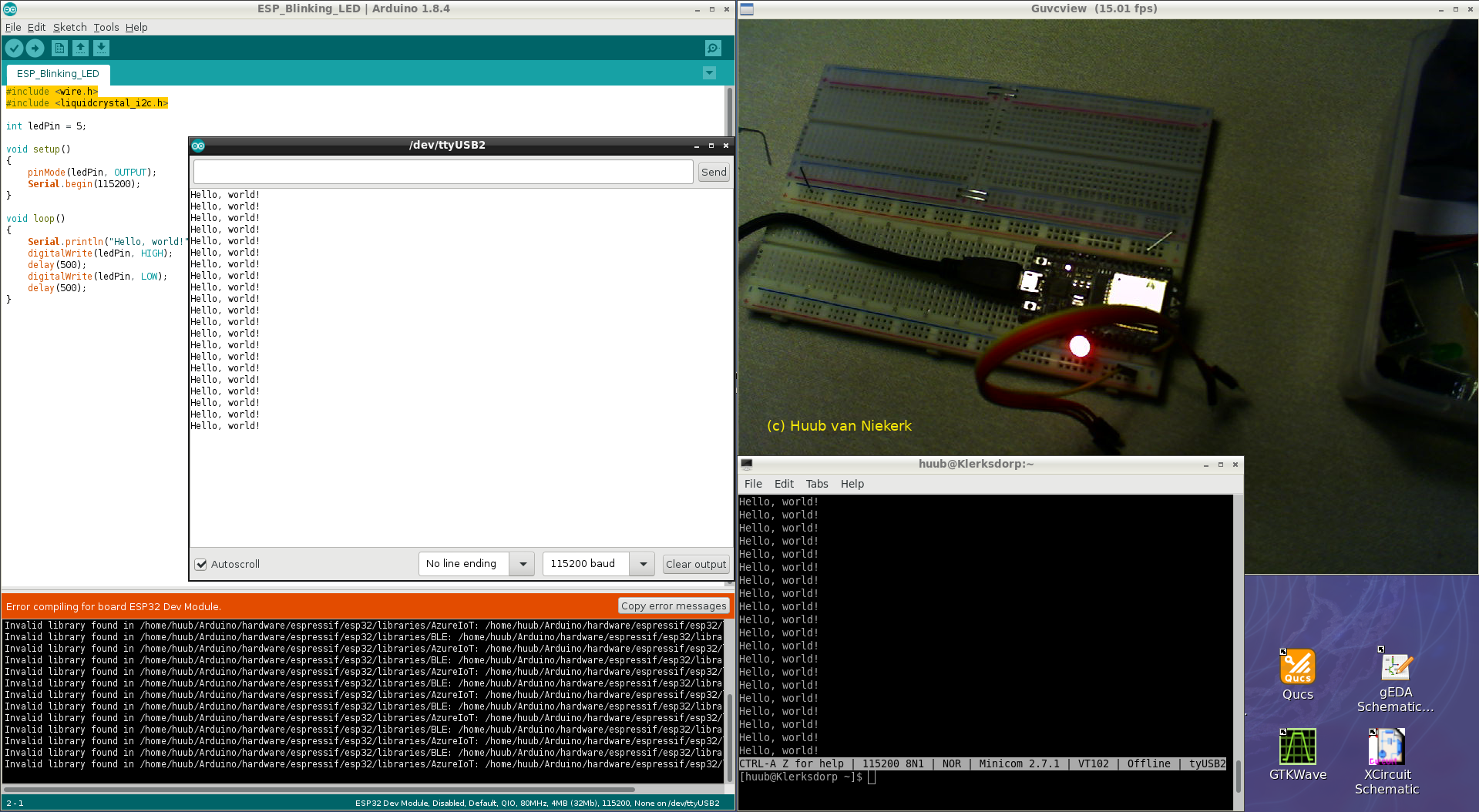
ESP32: First focus: changing the algorithm to save codelines for the LED. Then: the keypad needs a solution to be held, so what about fischertechnik? Then: servomotor and buzzer. What's up? Click the image to watch the video.
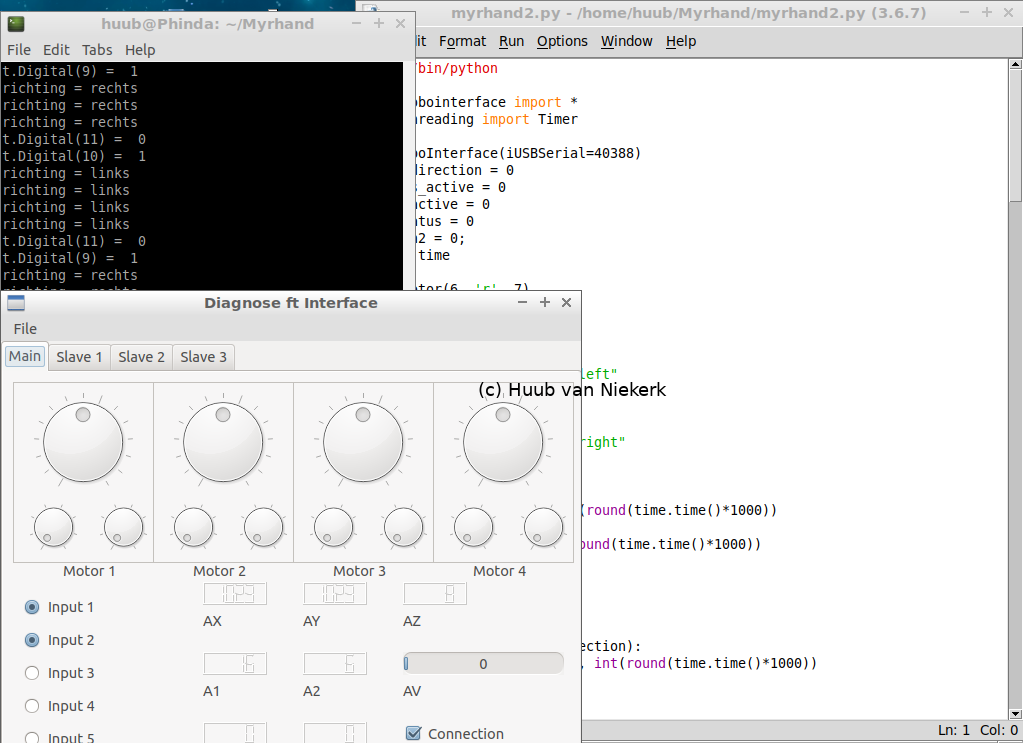
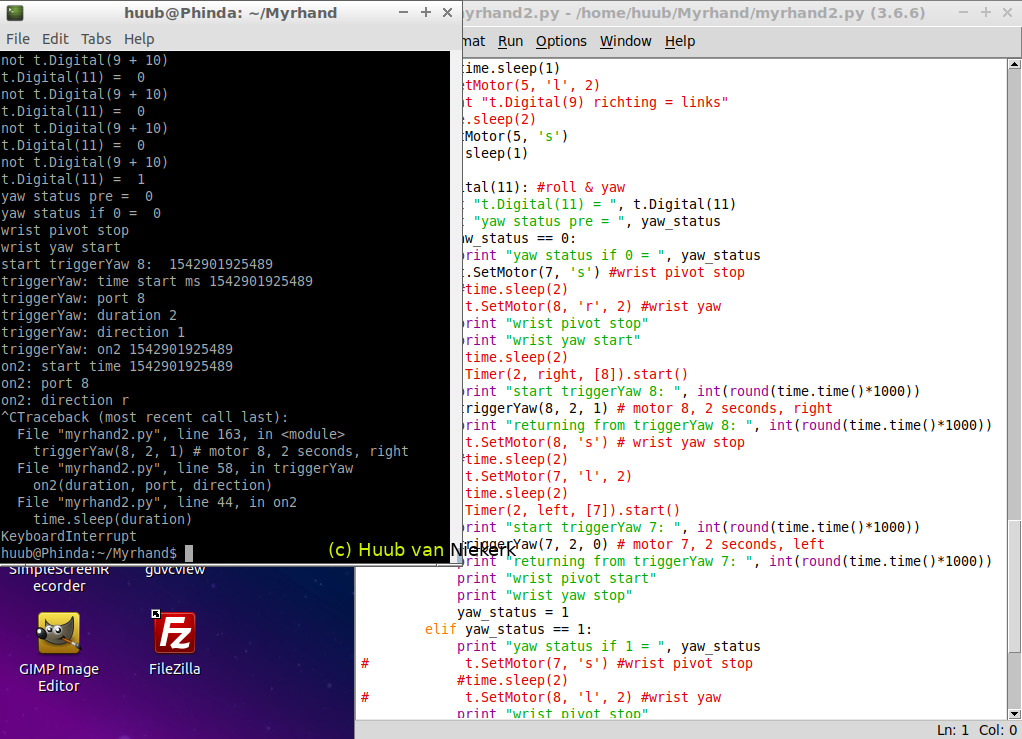
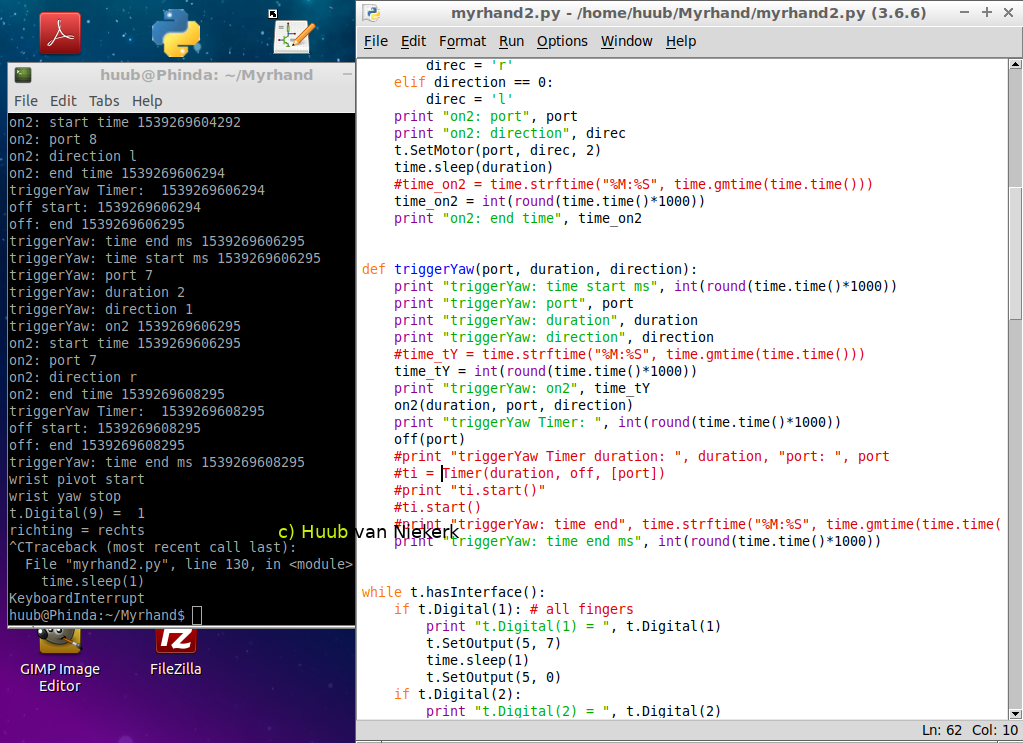
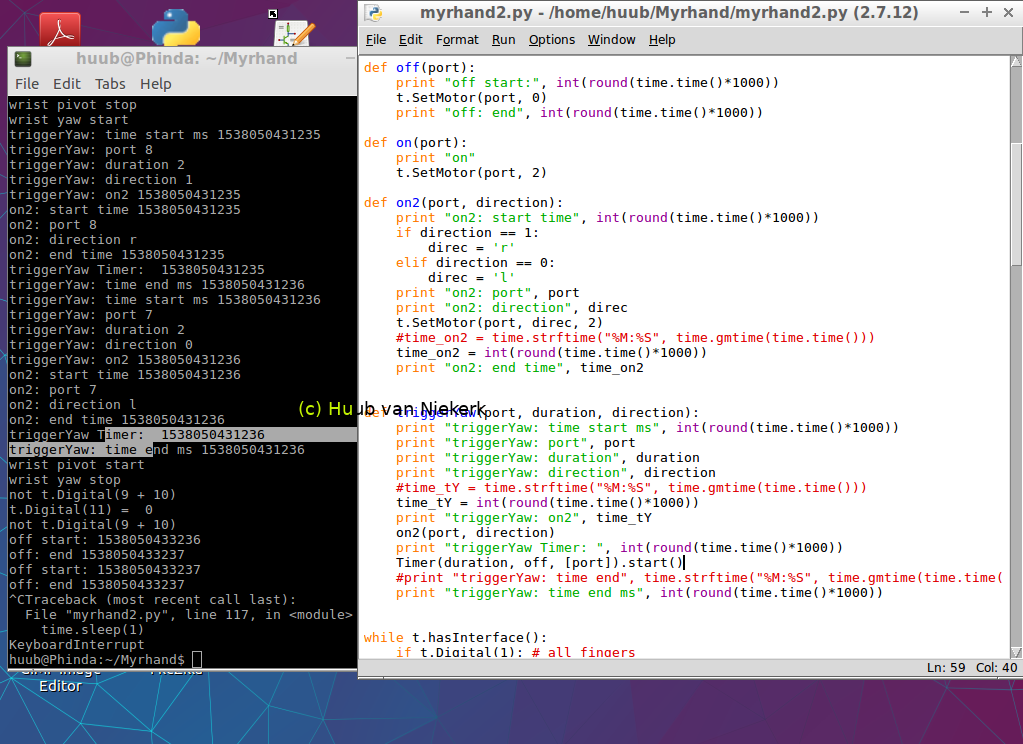
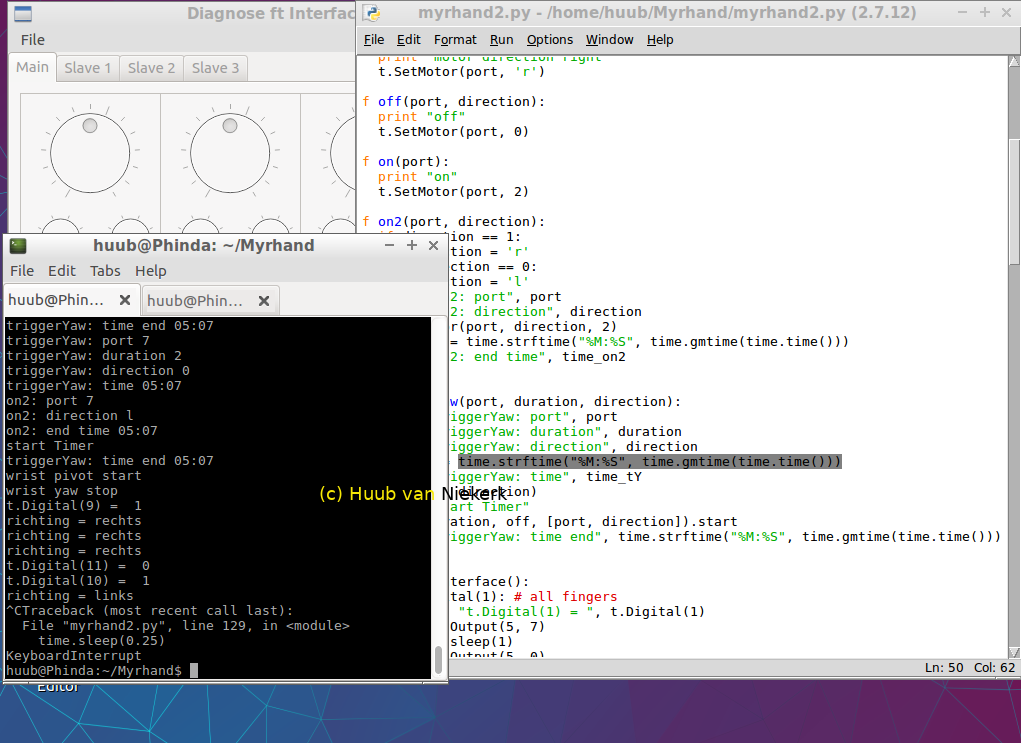
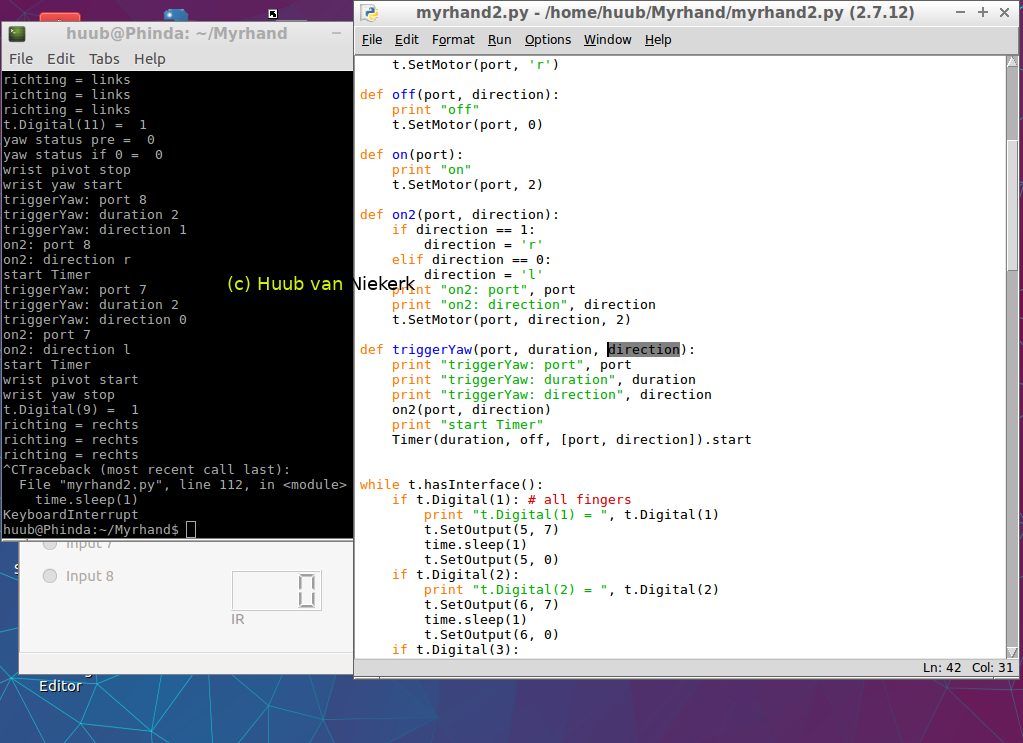
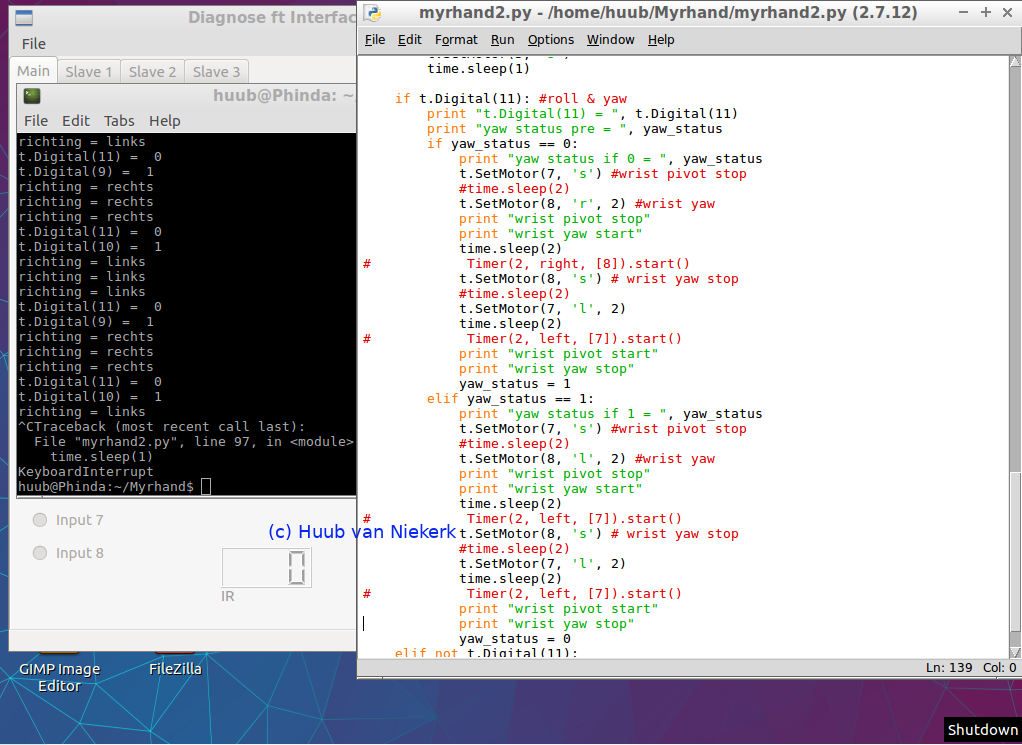
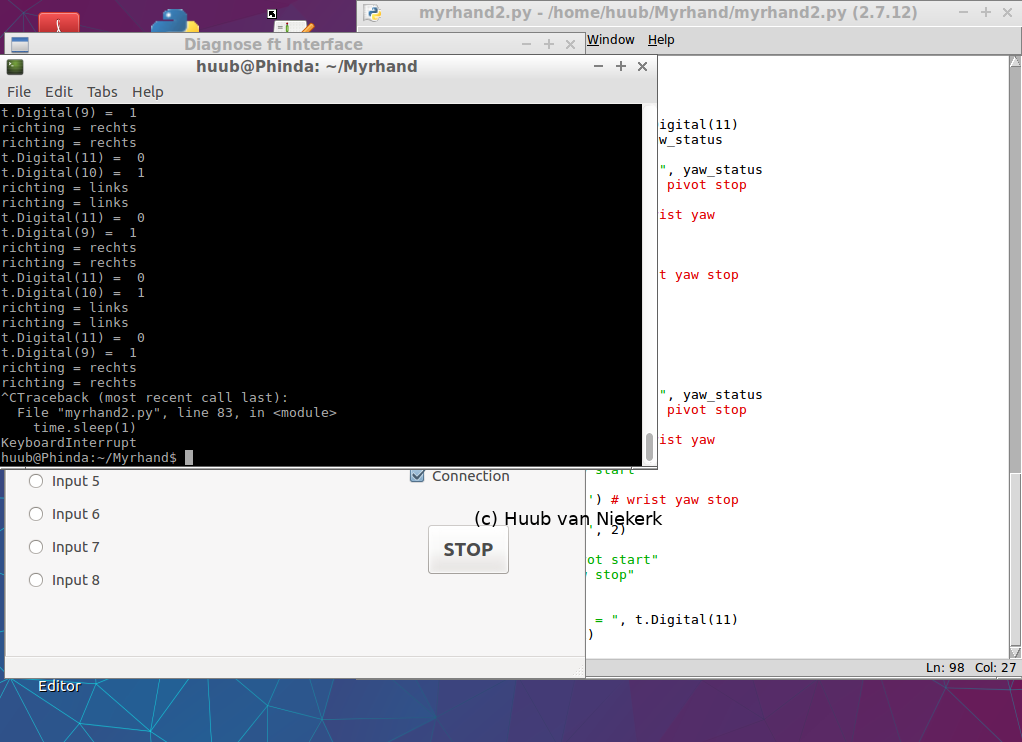
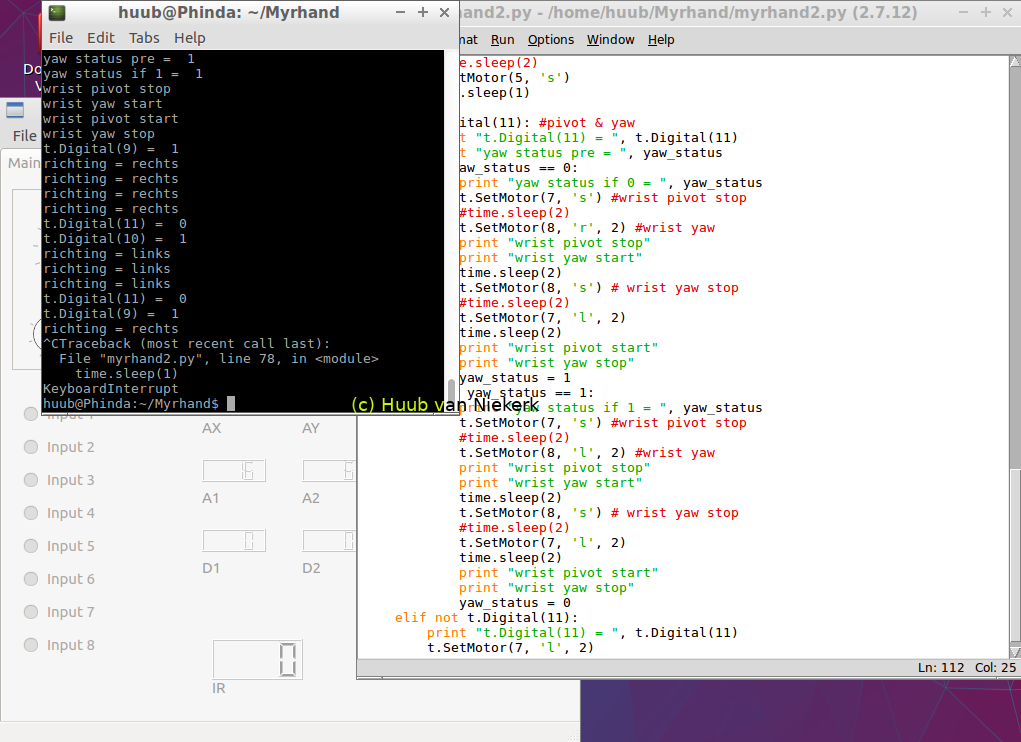
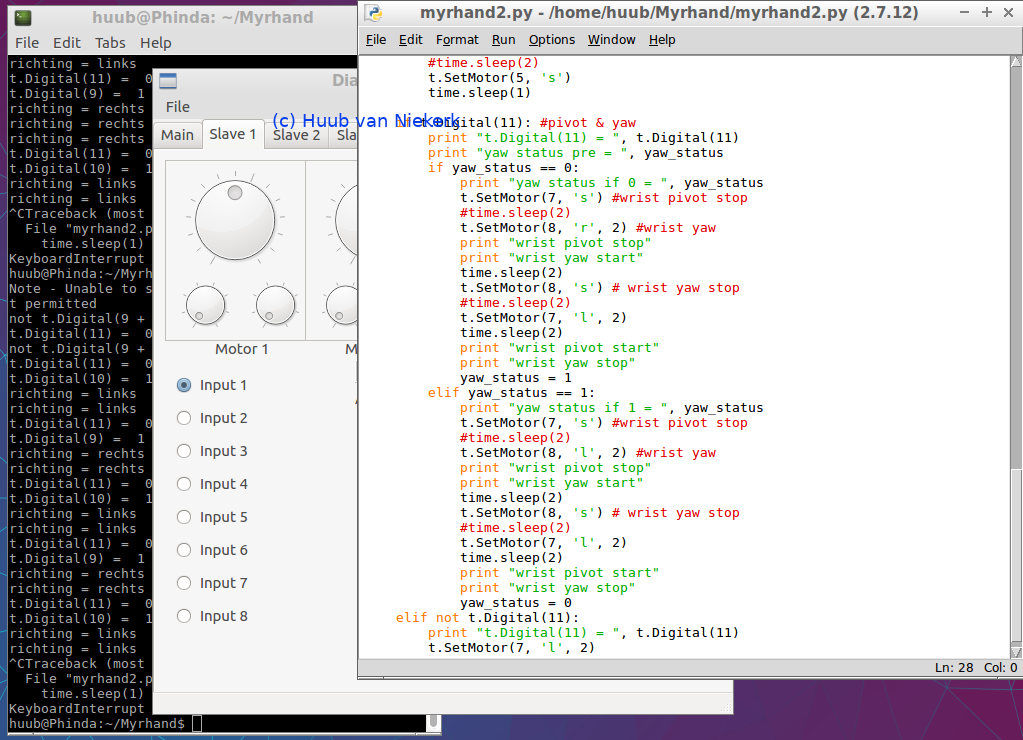
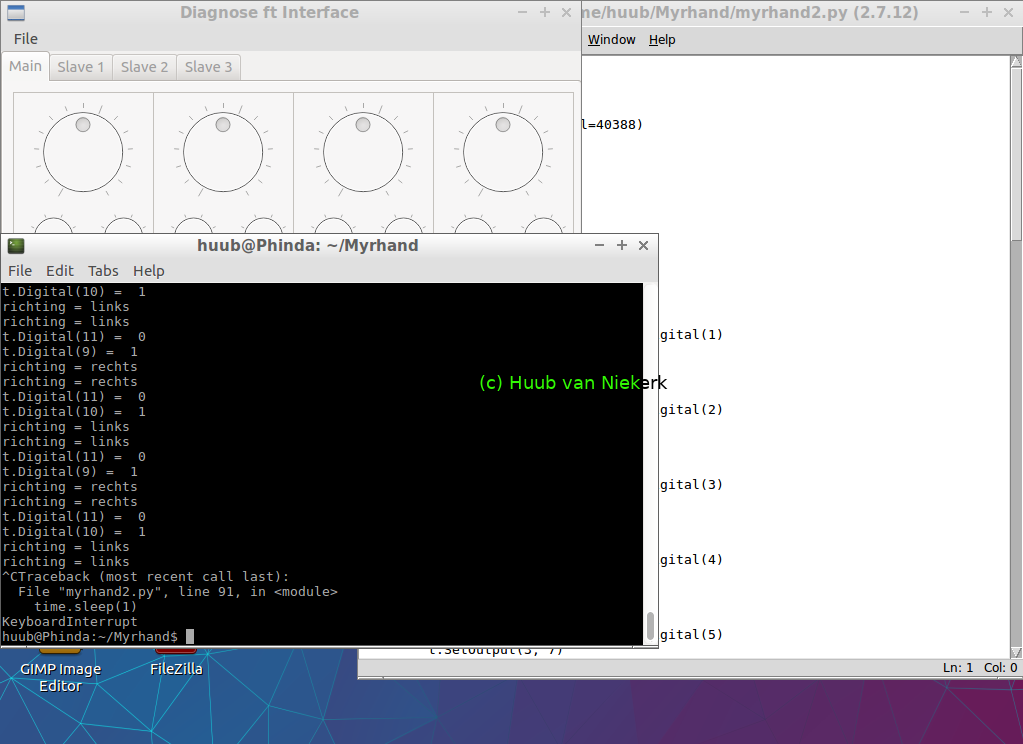
Hand: Time to continue with the hand and pivot: the mount has to be improved. After the change, something else shows up: weight. The yaw gearing seems to be too weak and I need to lift the hand. Enough to get going. Somehow Click the image to watch the video.
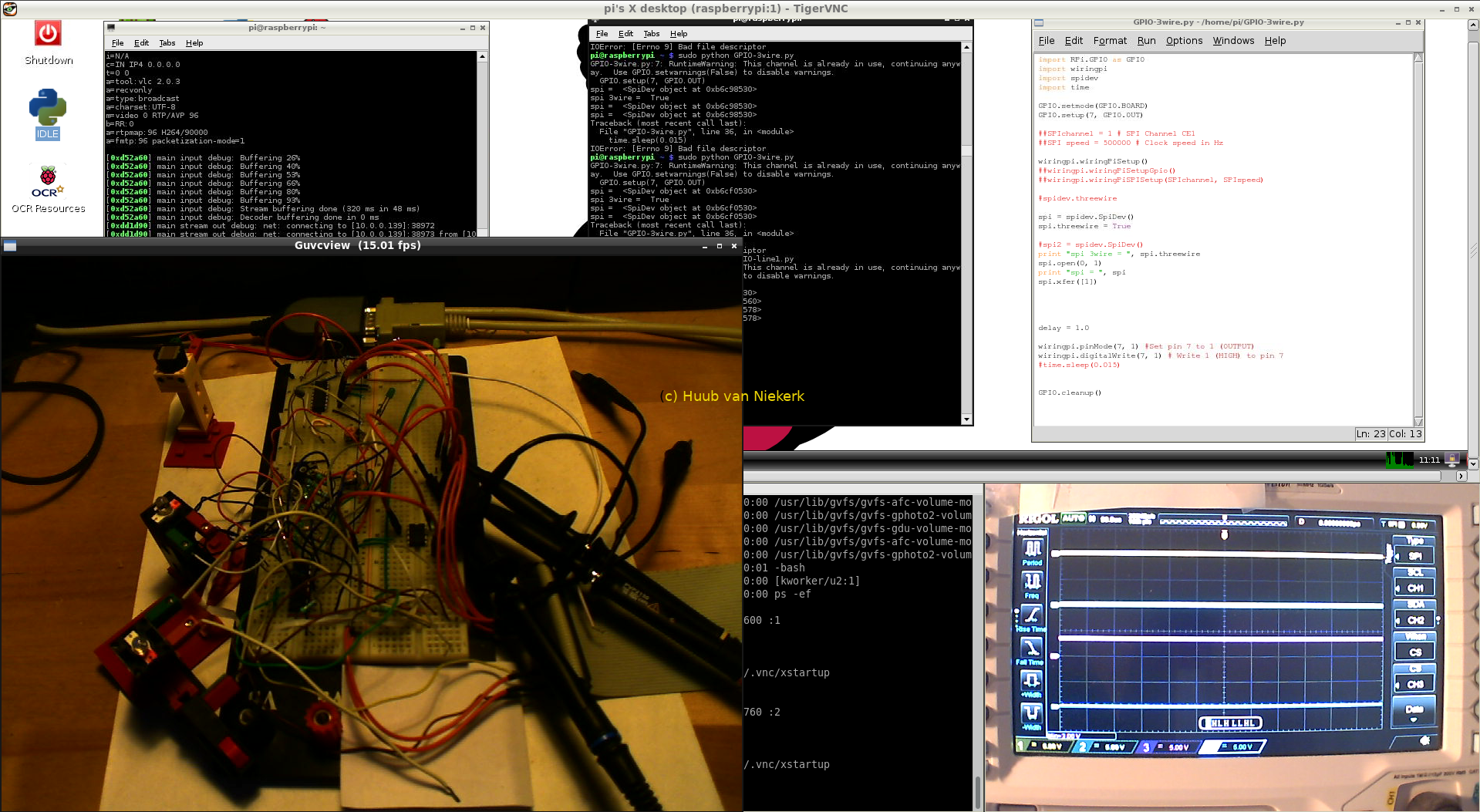
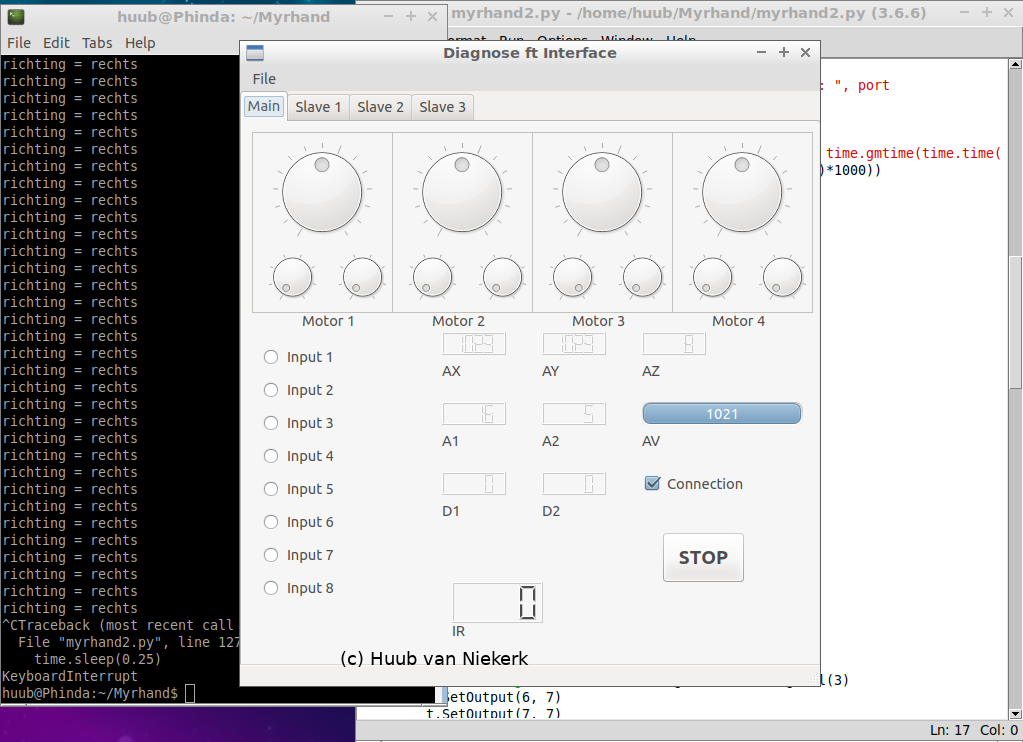
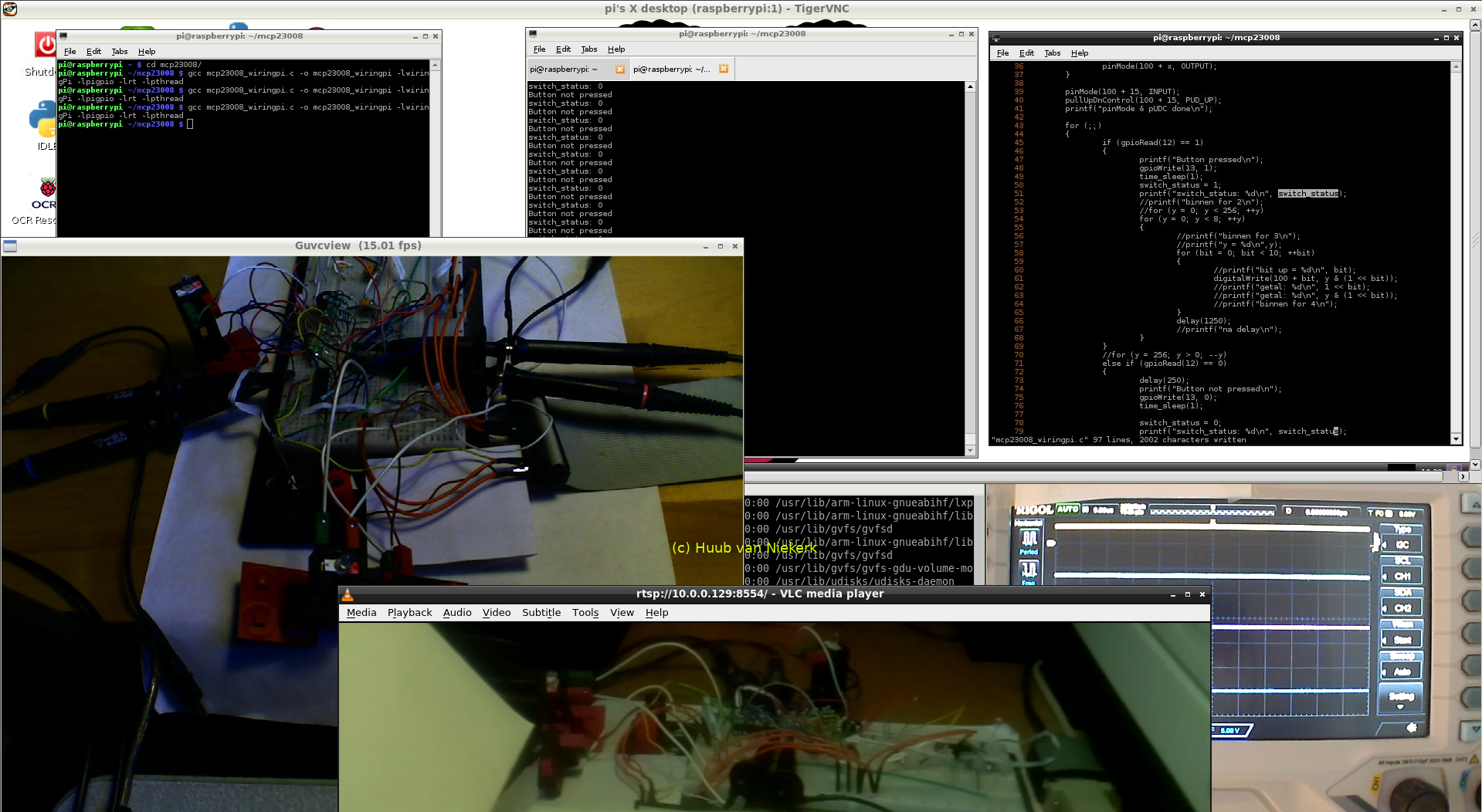
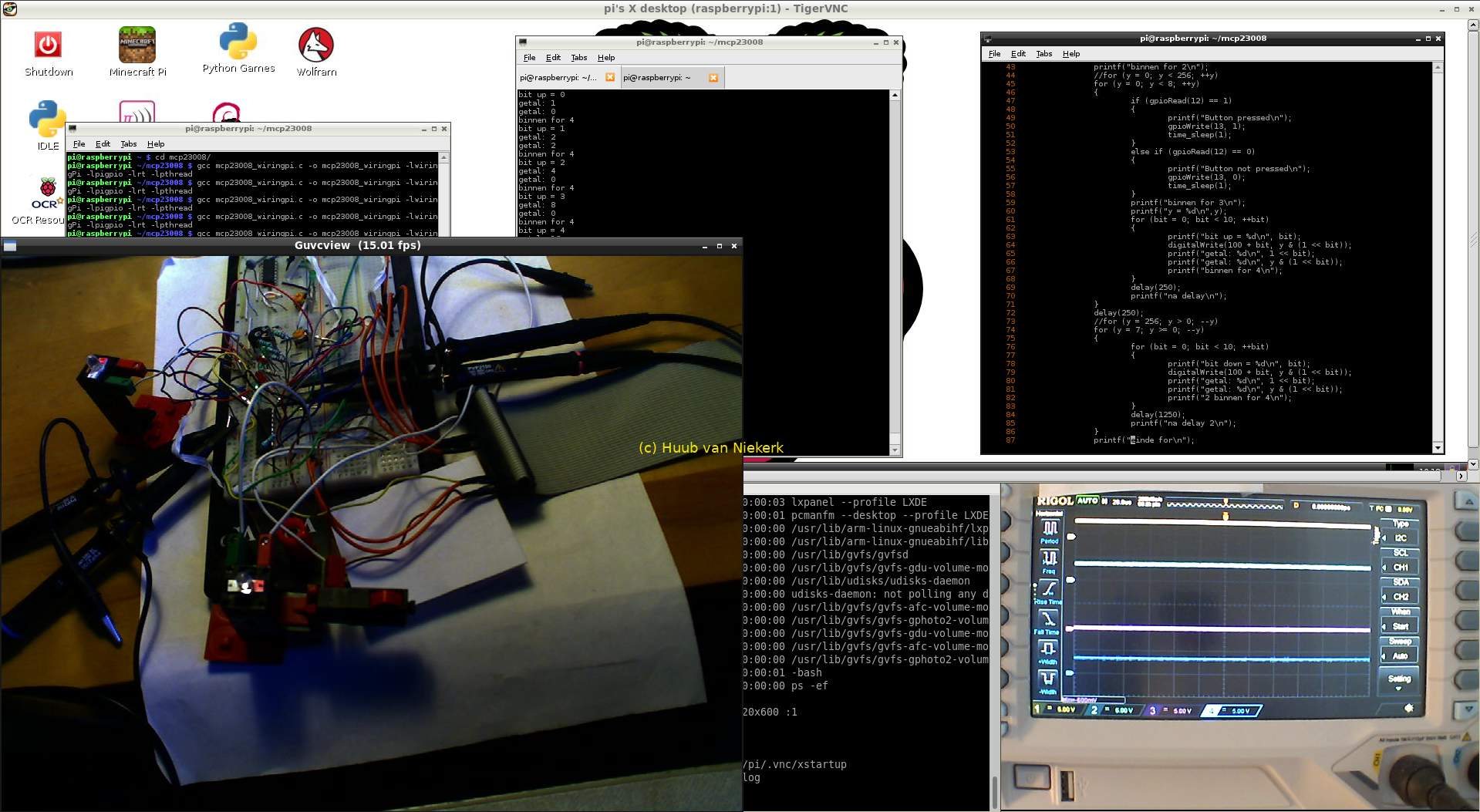
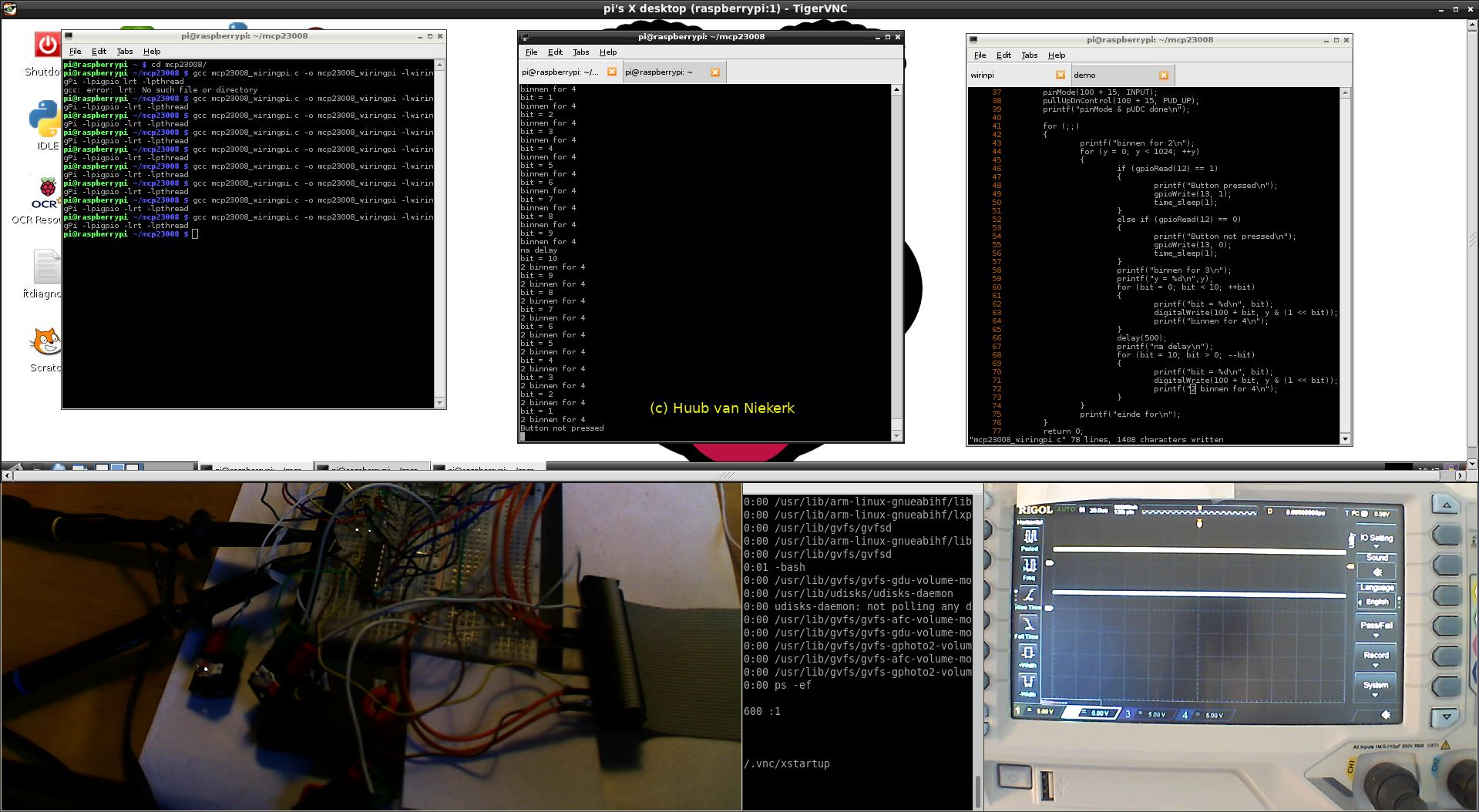
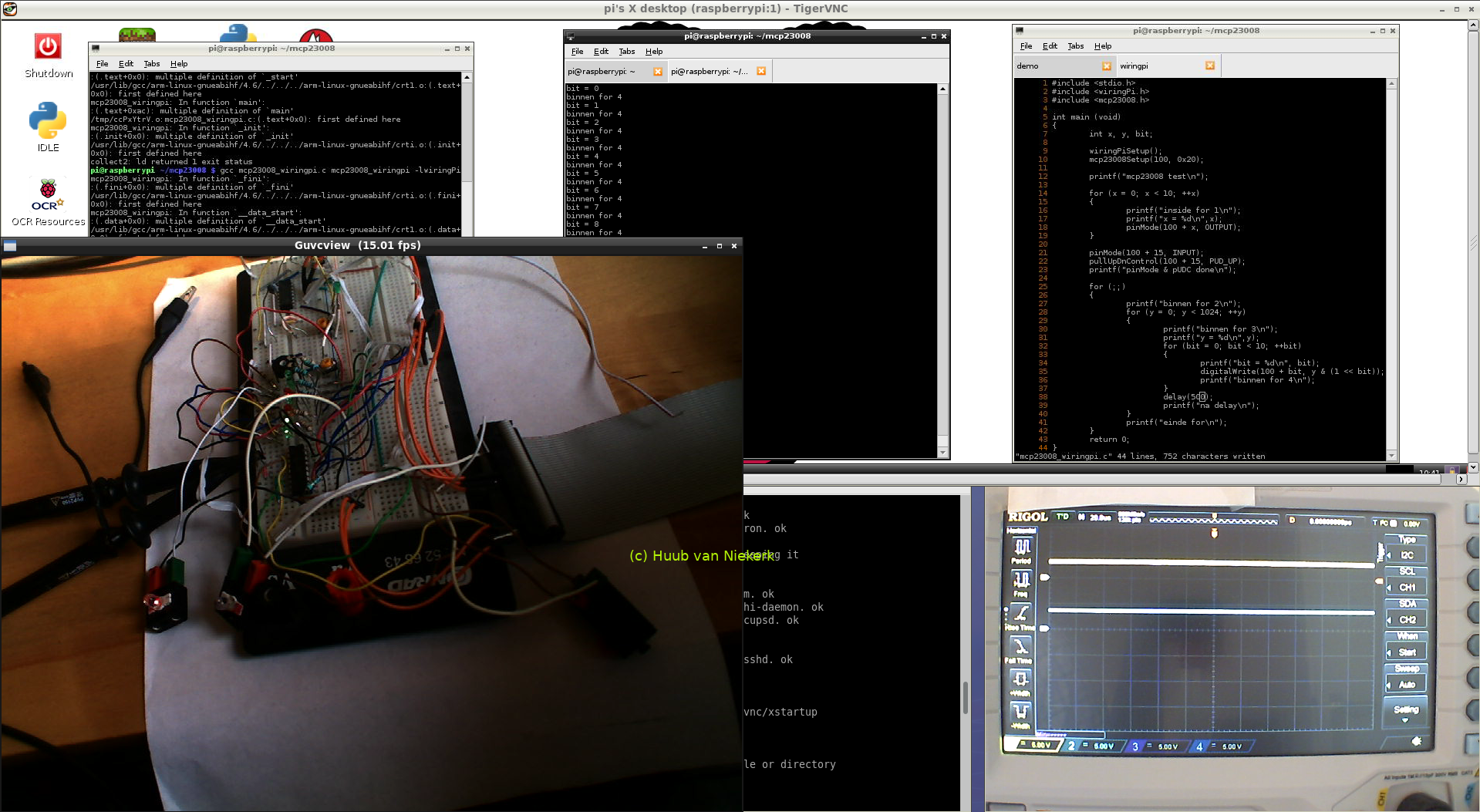
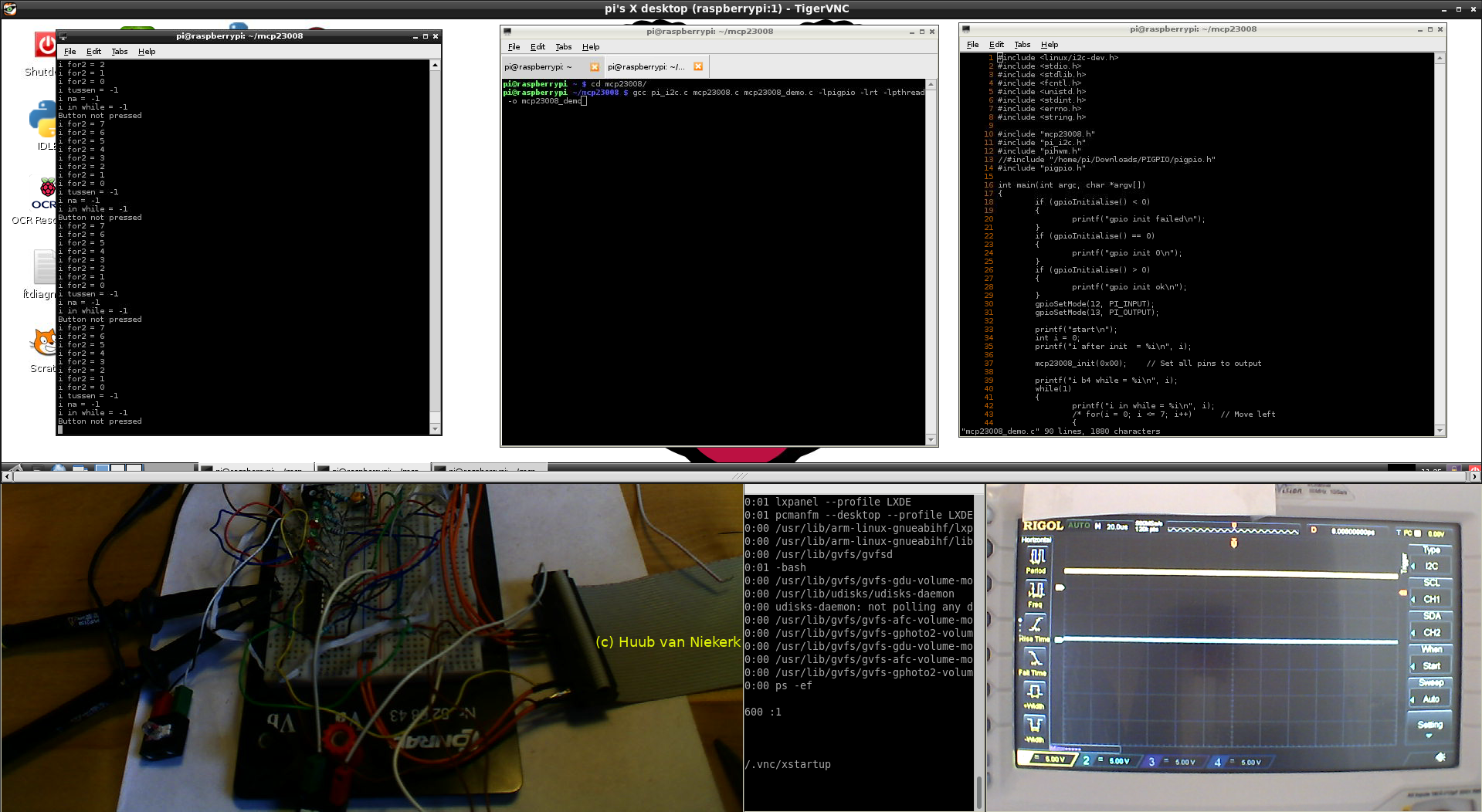
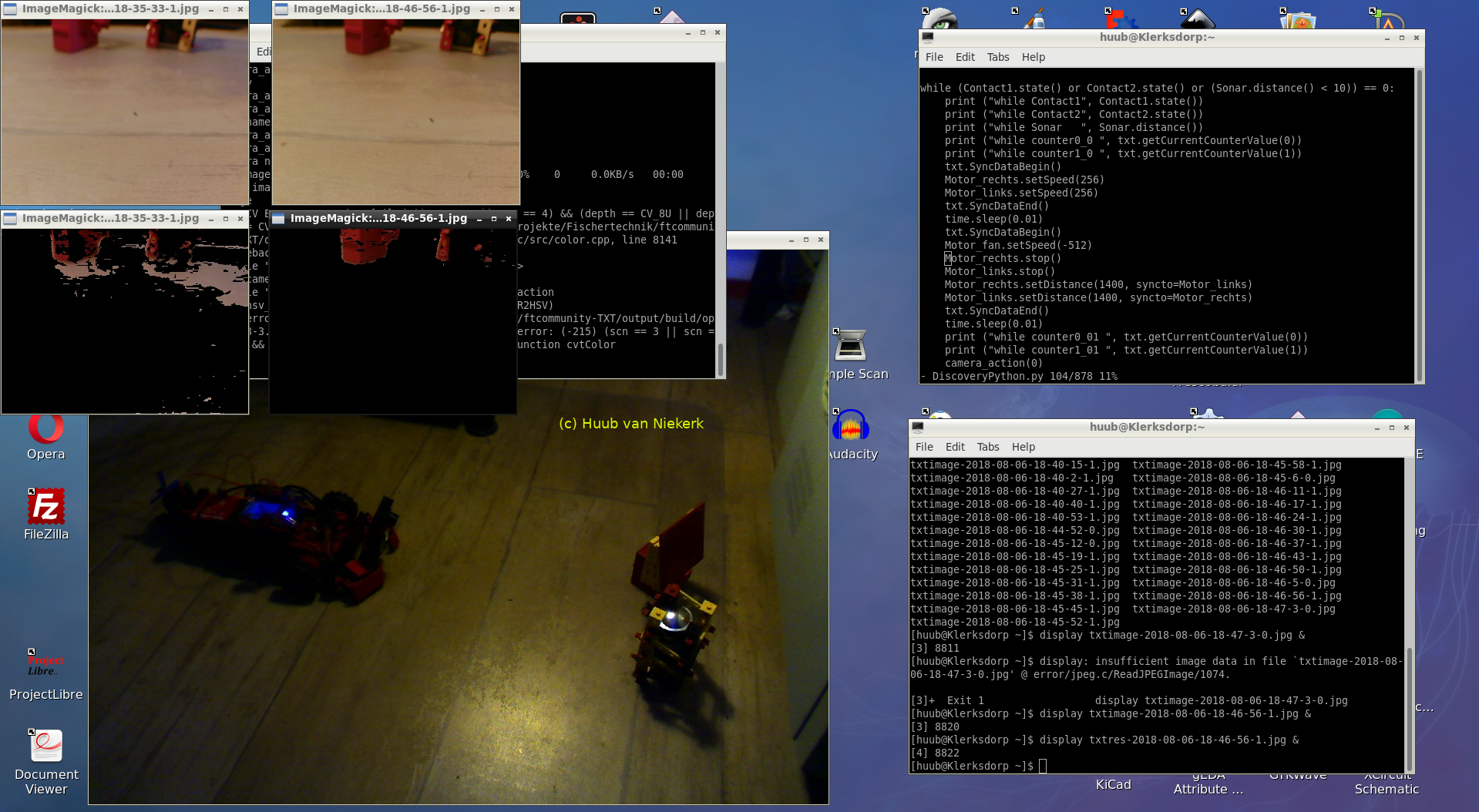
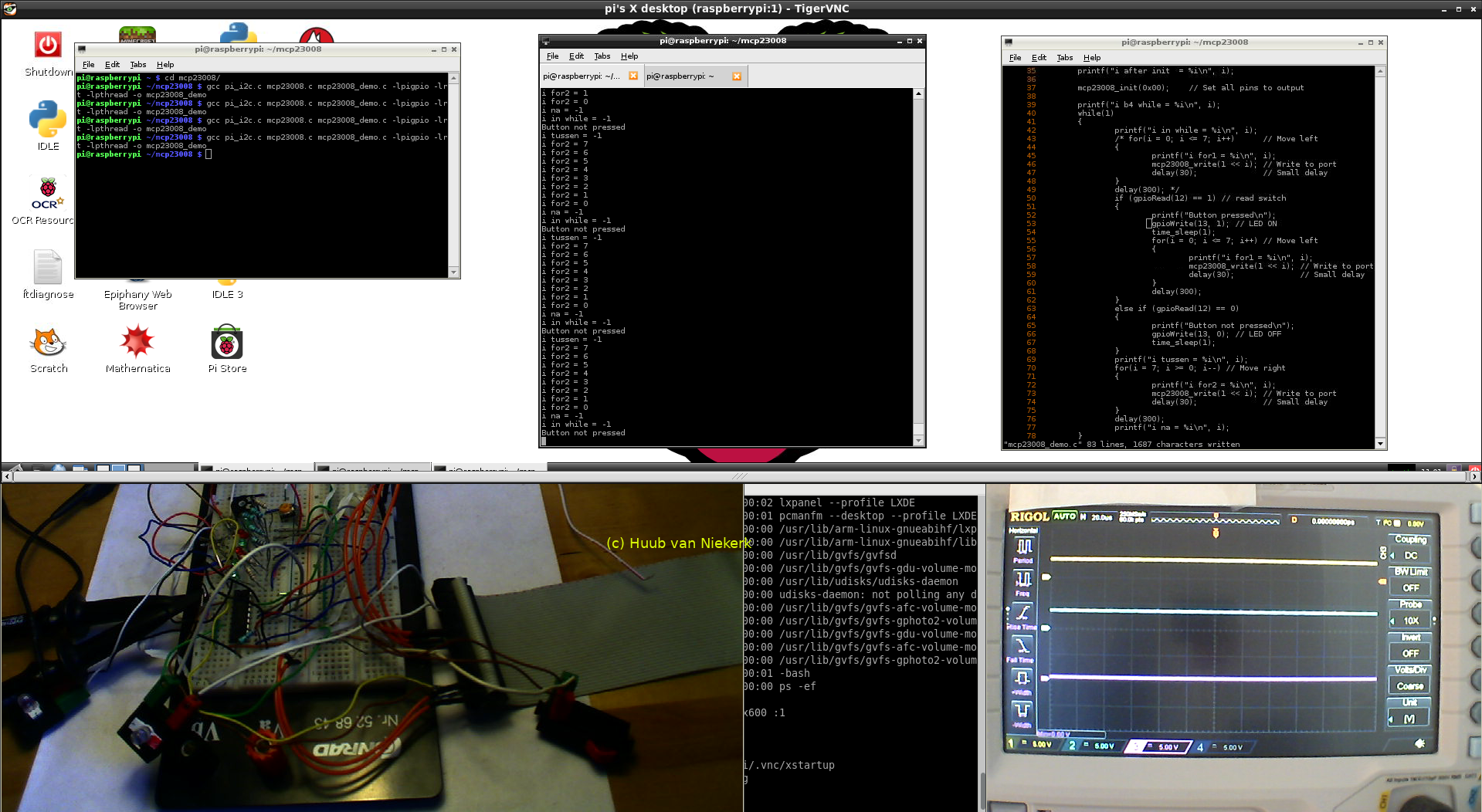
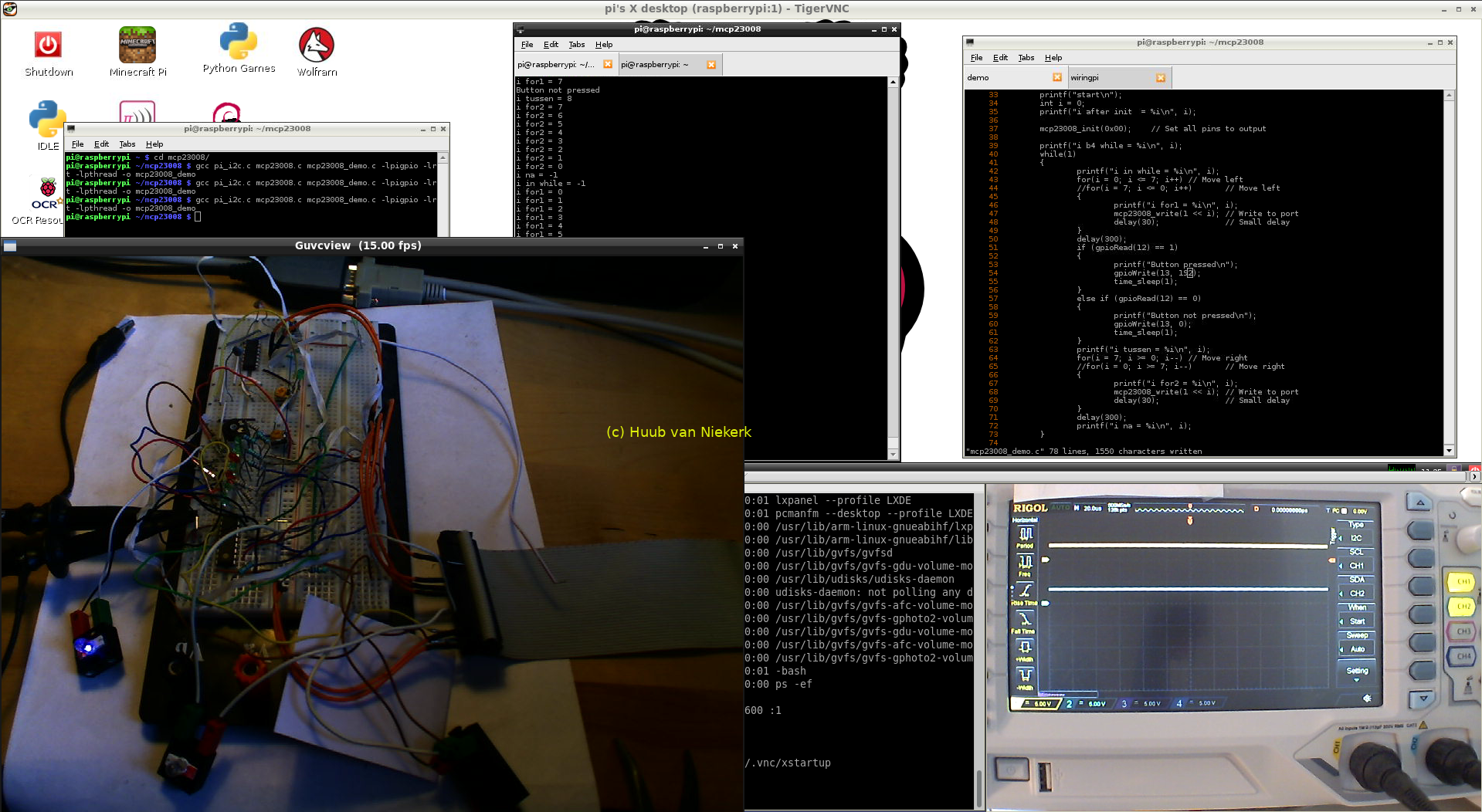
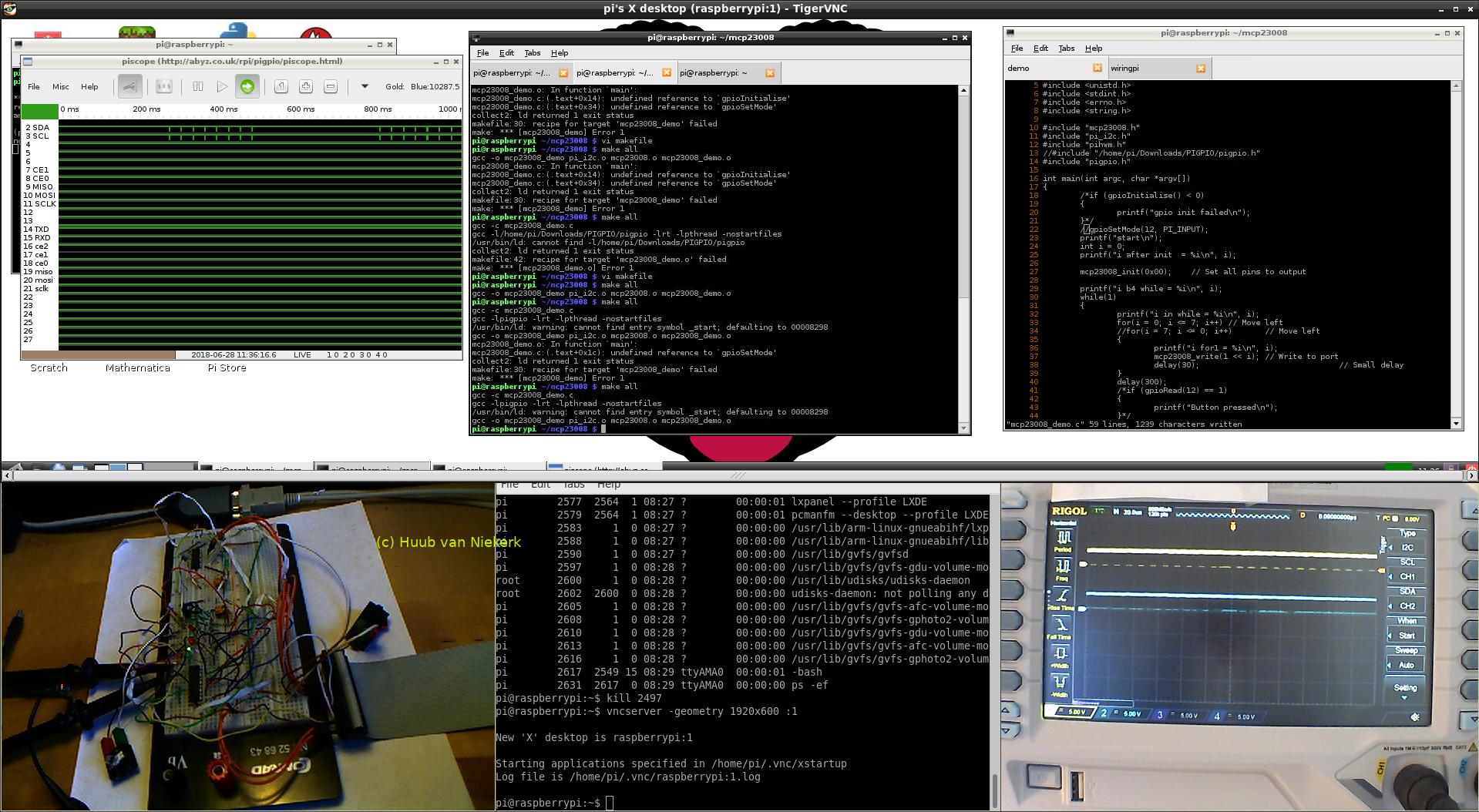
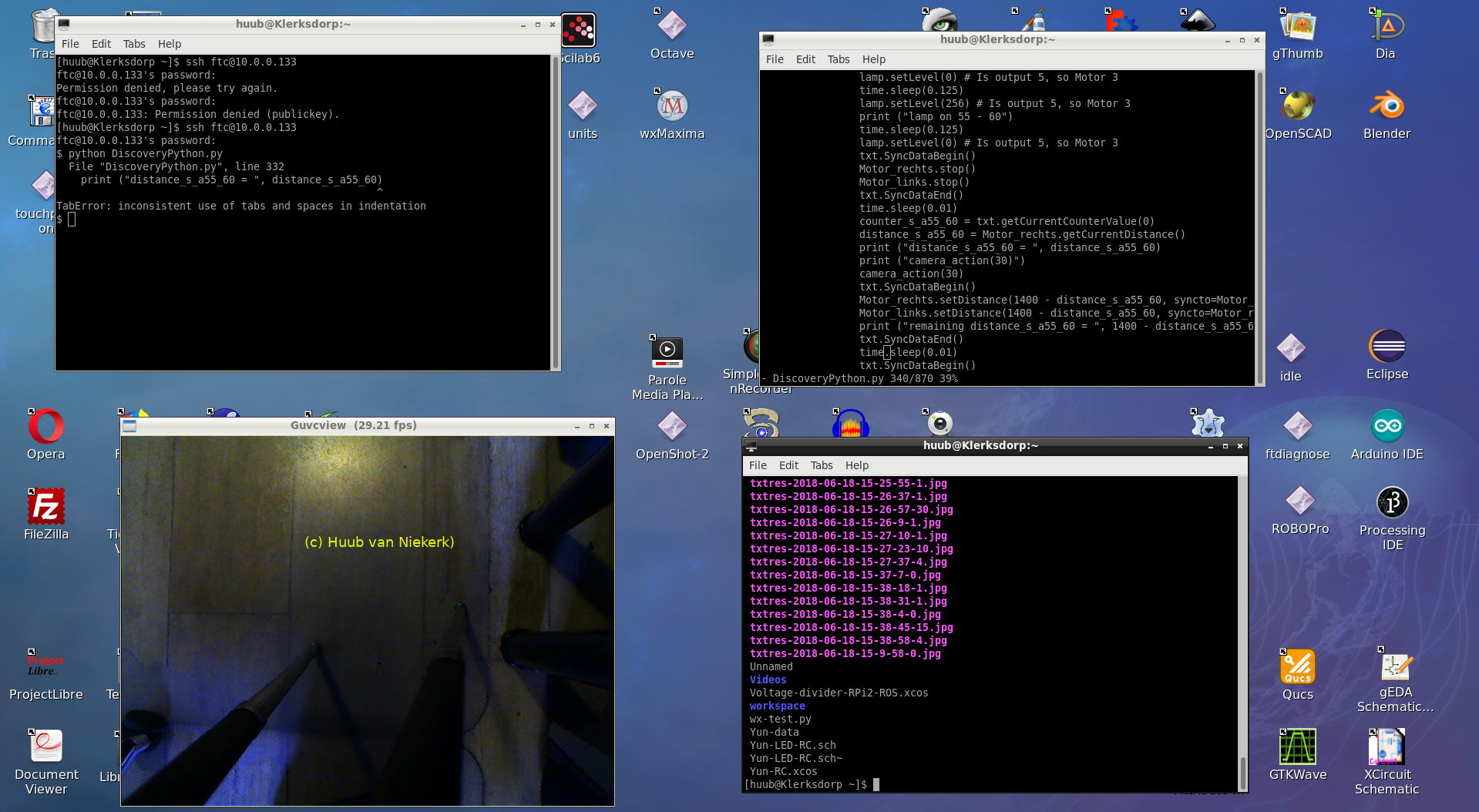
RaspberryPi: Another attempt to get to the MAX522: can I get Python to work using the Python shell? Using Mac and Android as well. Another surprise awaits, but why and how? Something doesn't make sense. Click the image to watch the video.

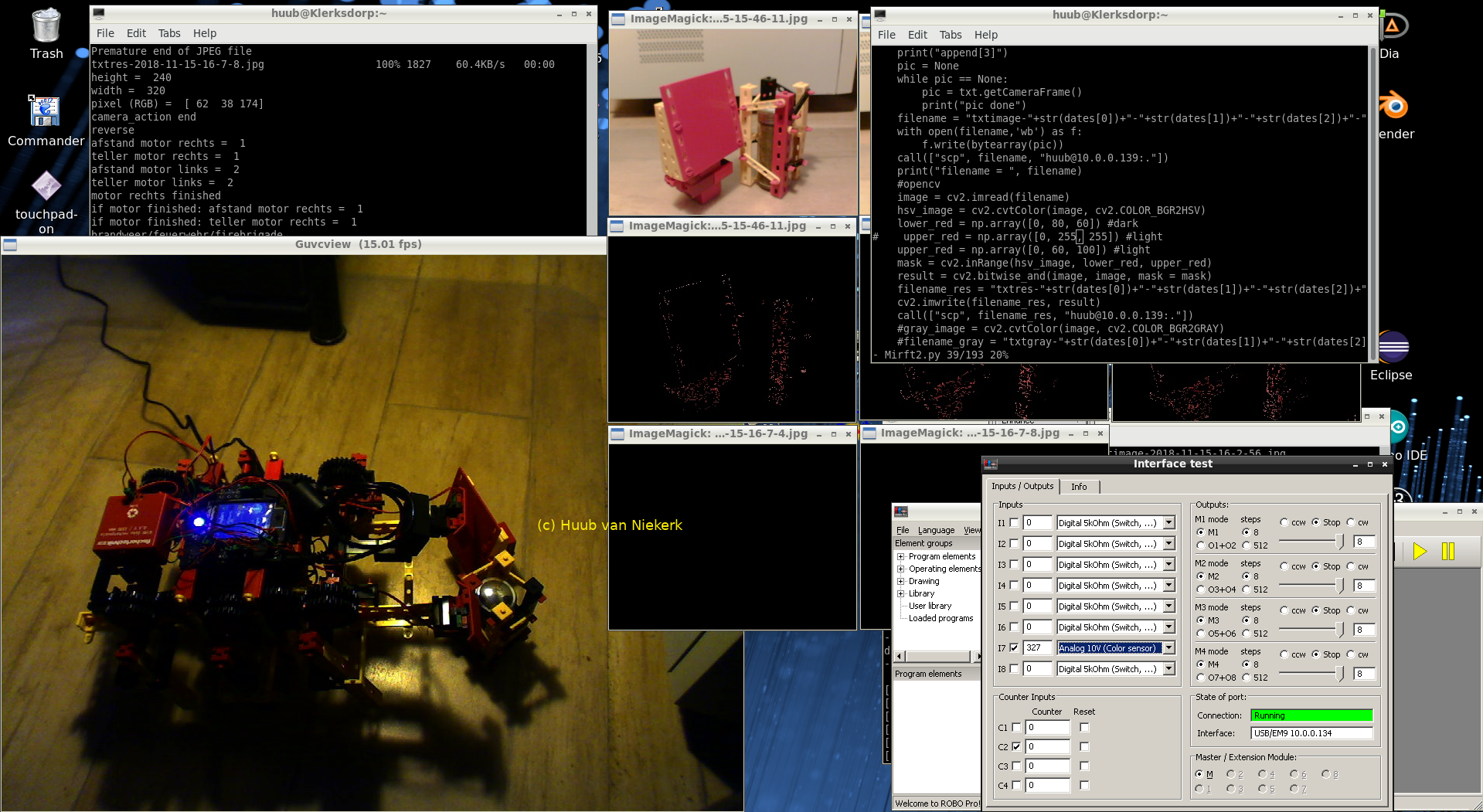
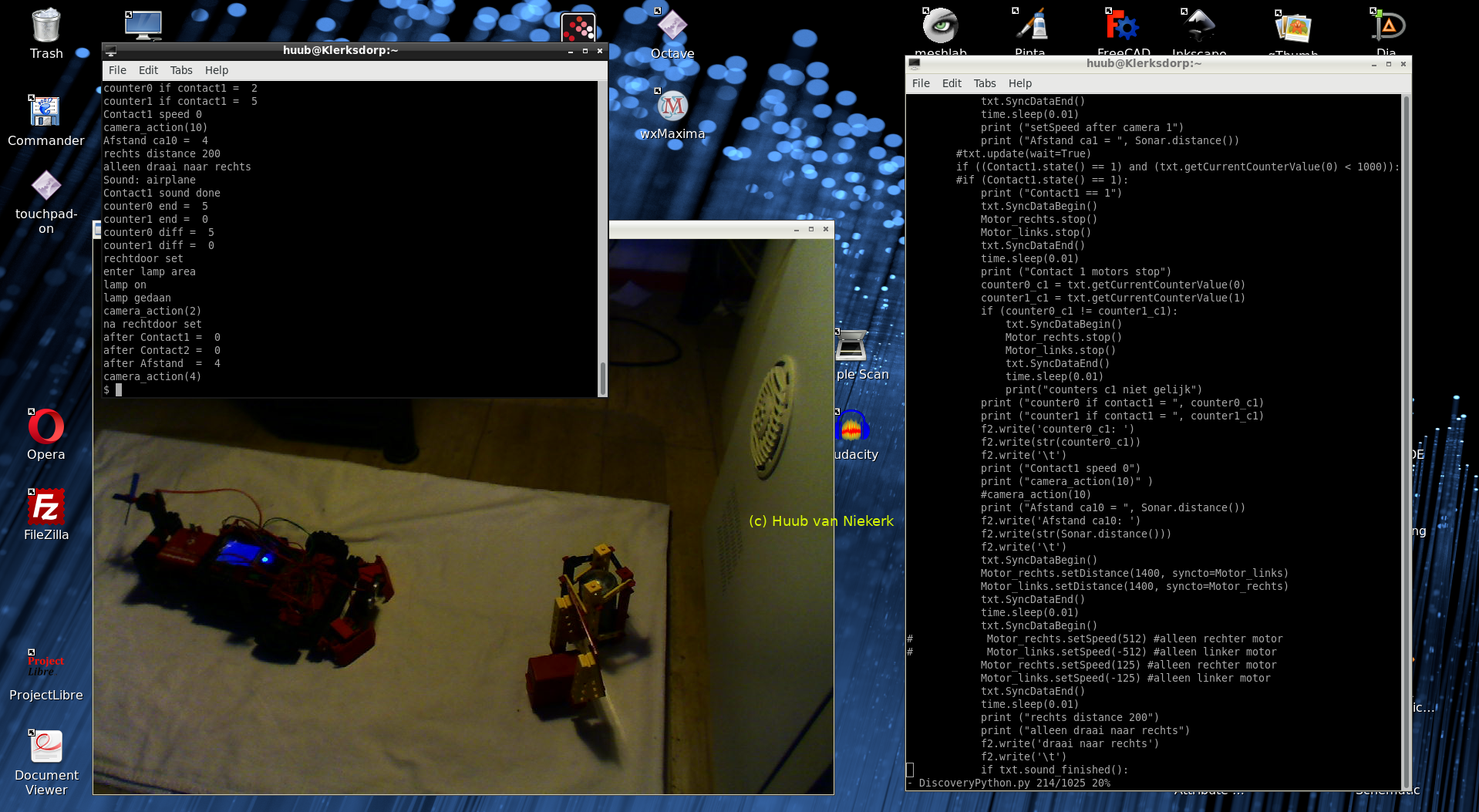
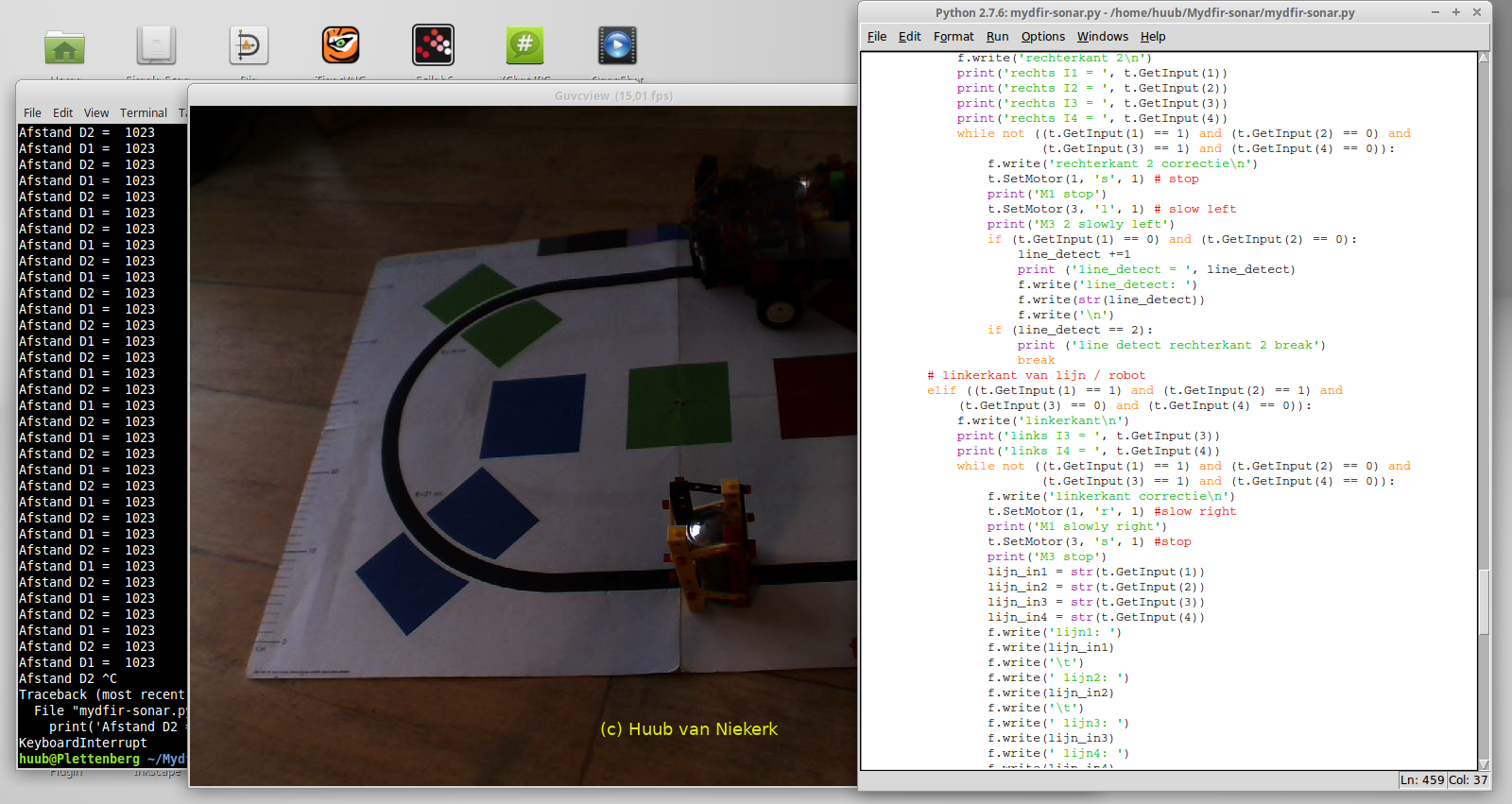
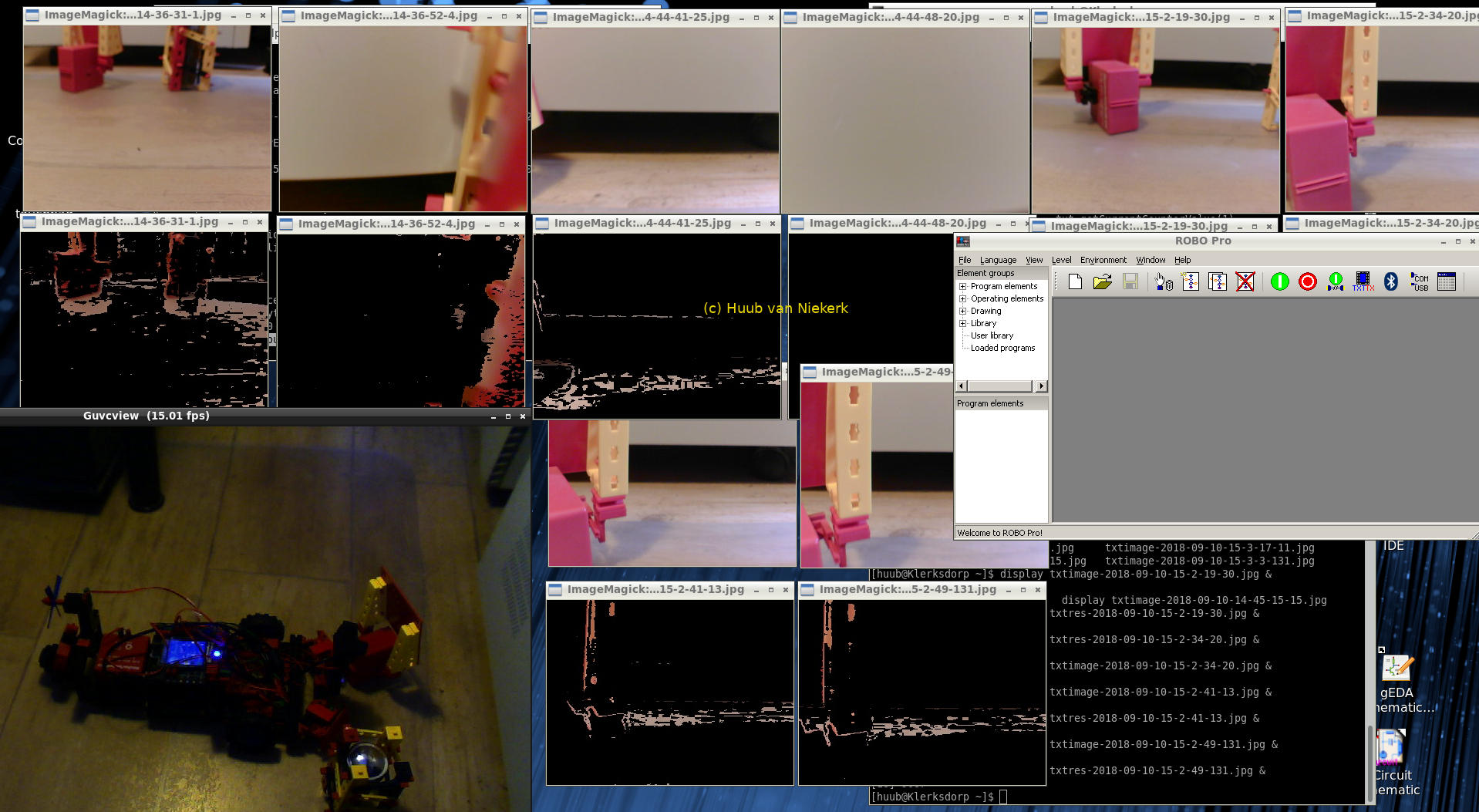
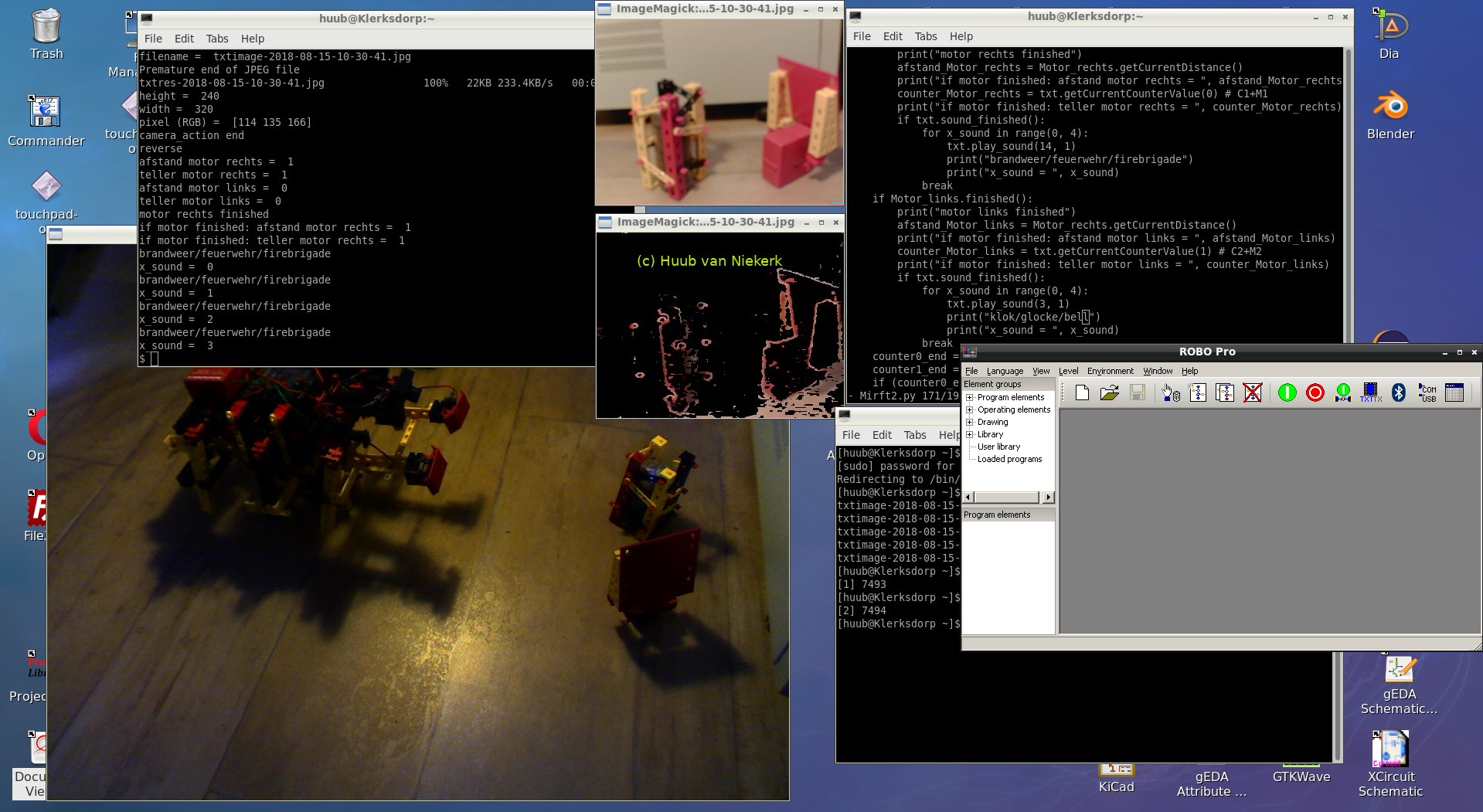
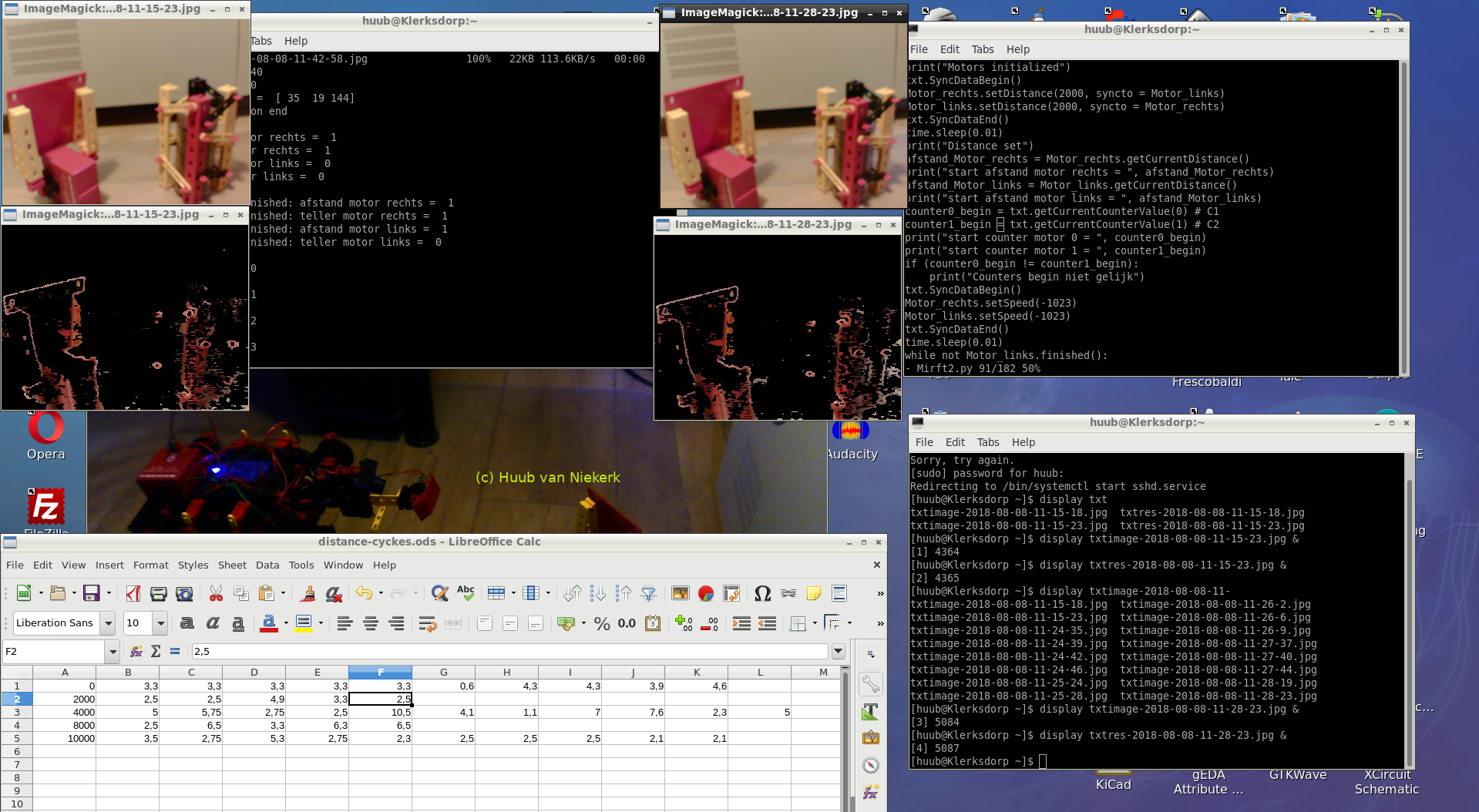
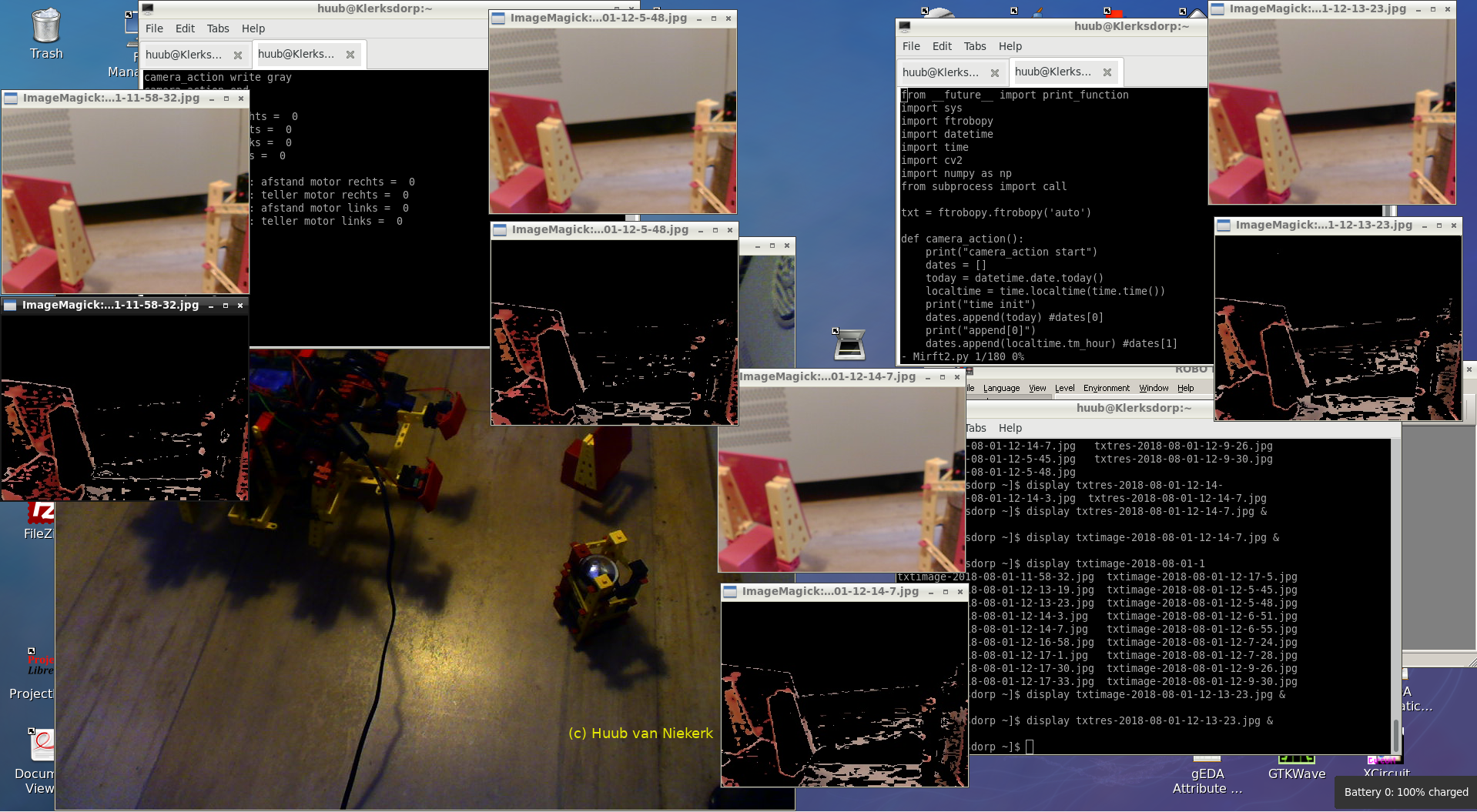
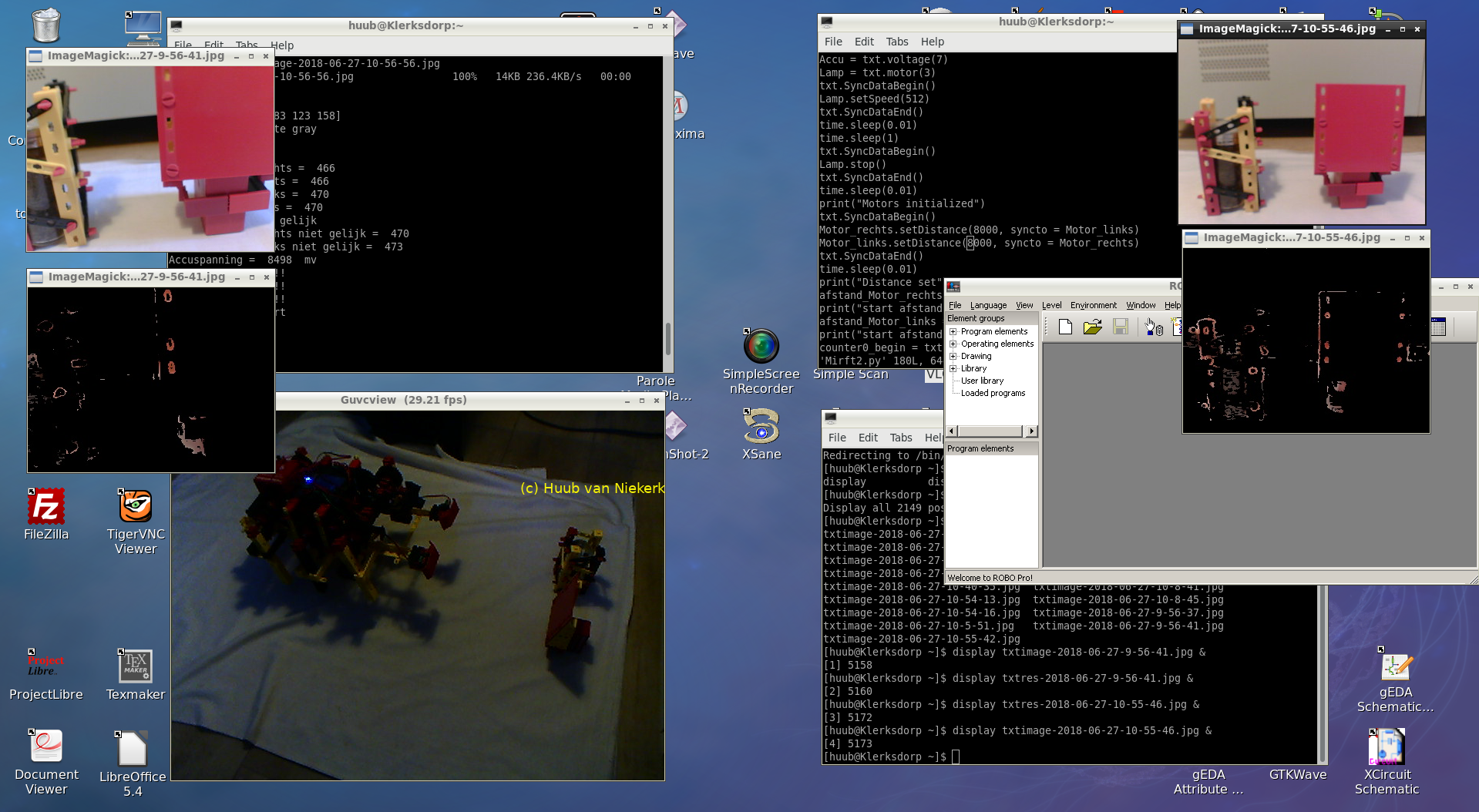
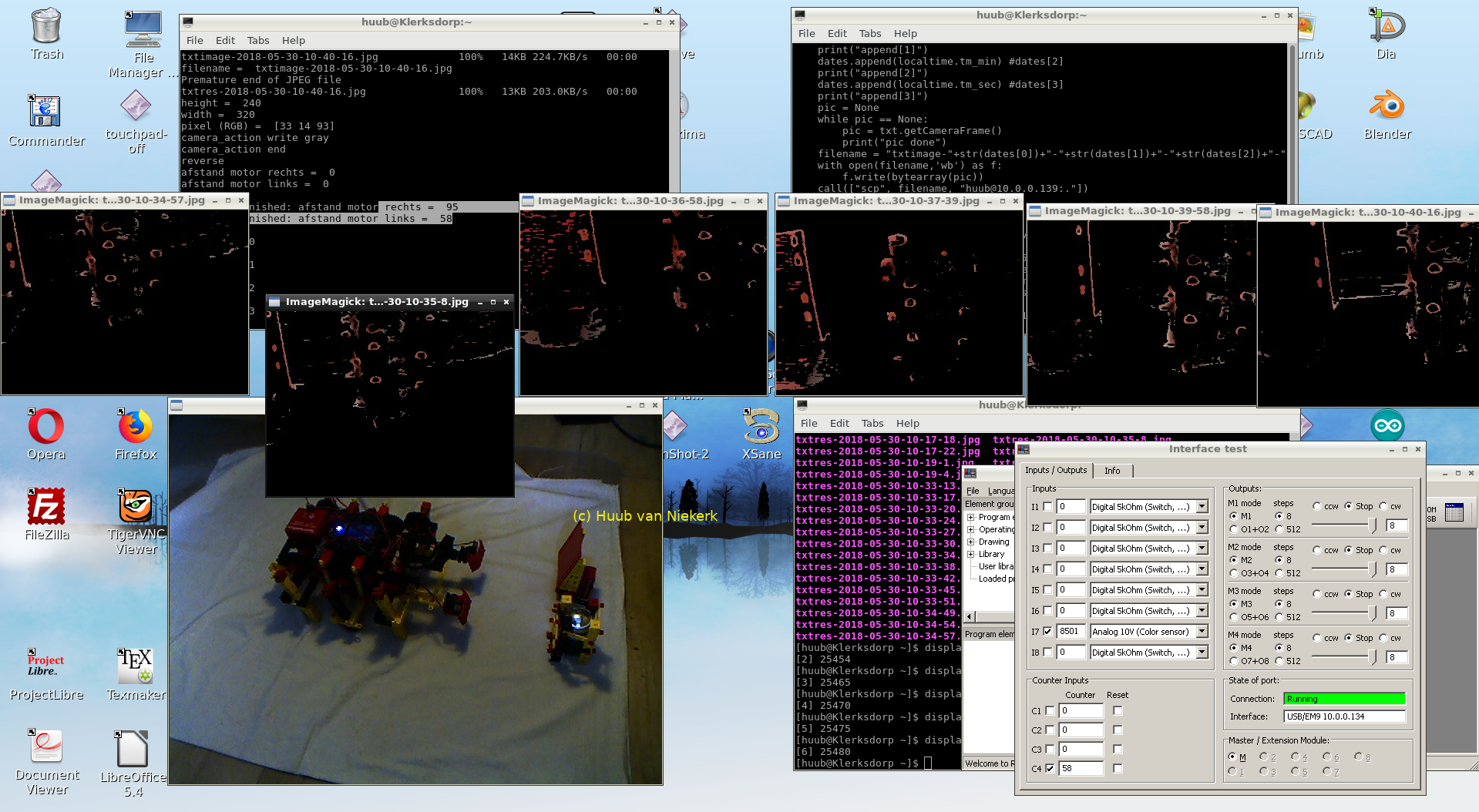
Mirft2: A new attempt on blob reveals an issue with both the command and the manual. But after solving it, does it work? Then on with Blender and some modelling. A close look at the real robot reveals I made a small mistake and need to redraw a bit. Click the image to watch the video.
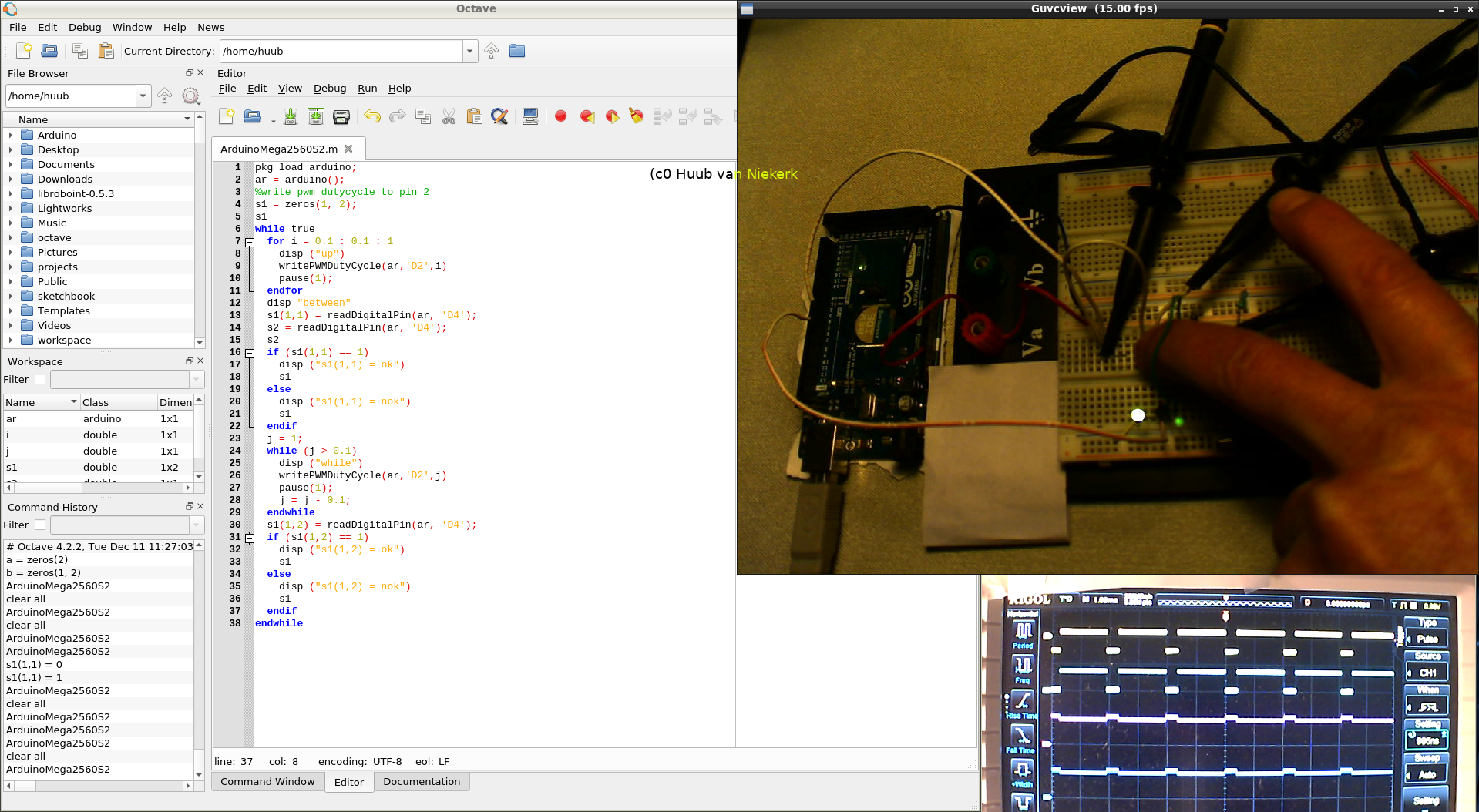
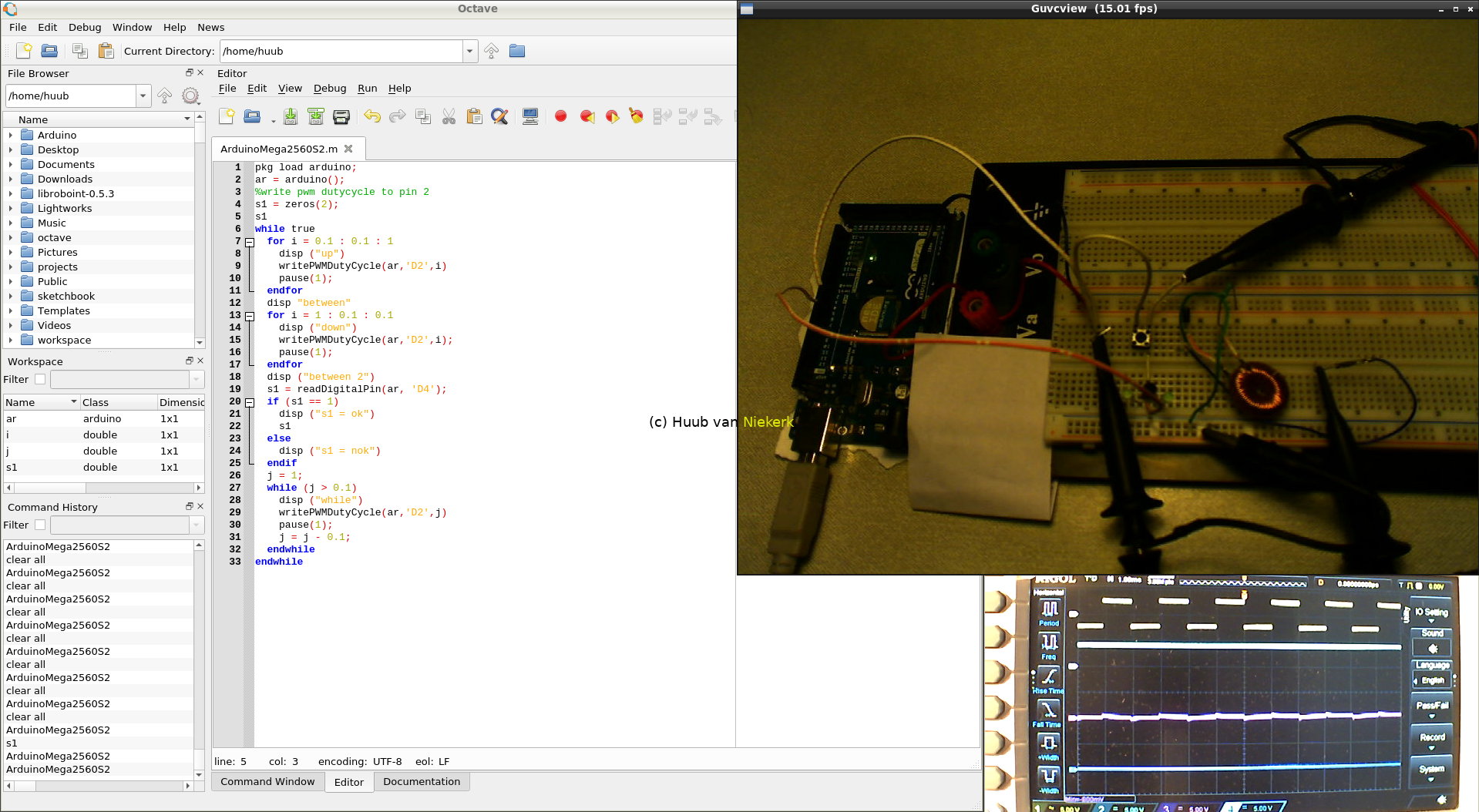
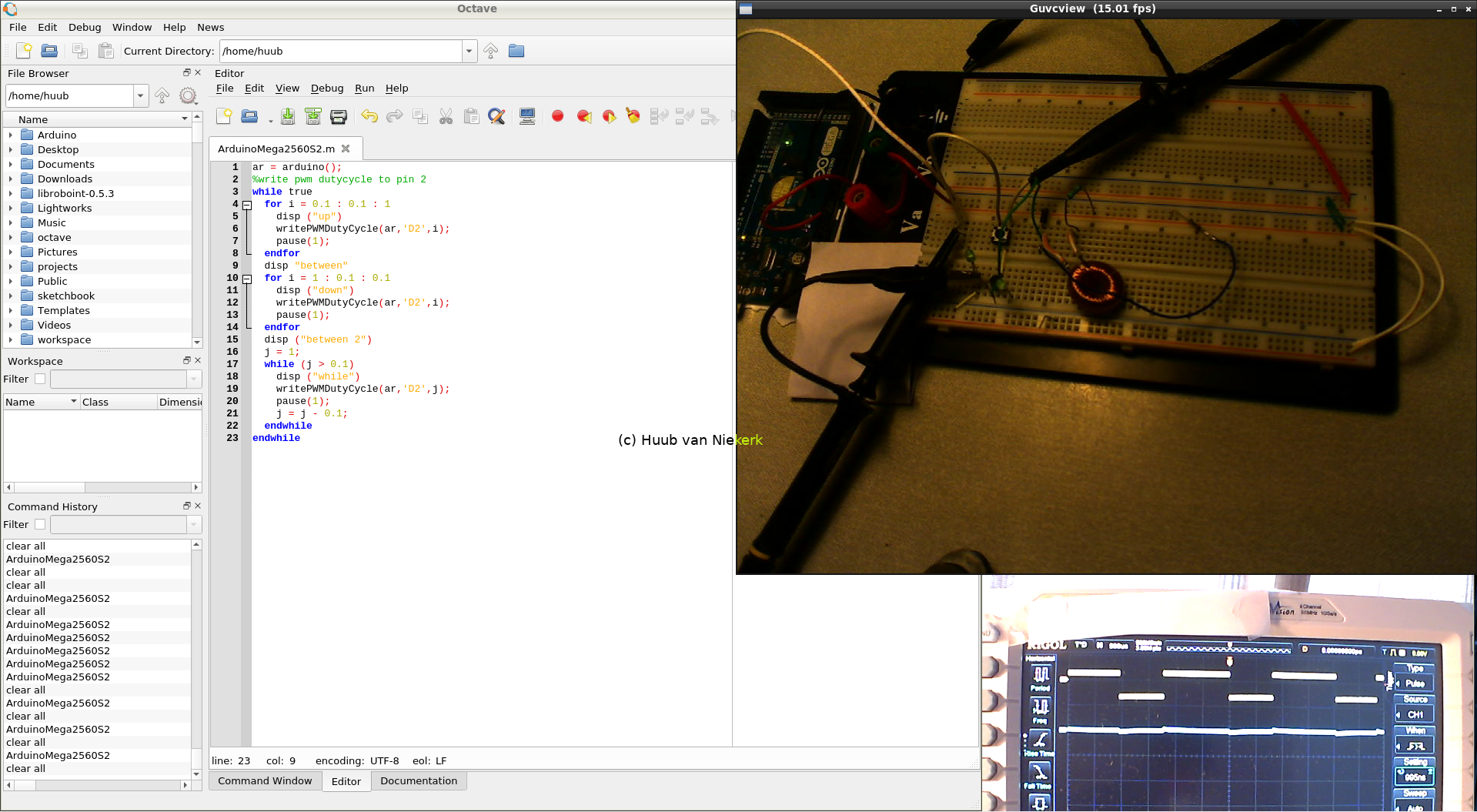
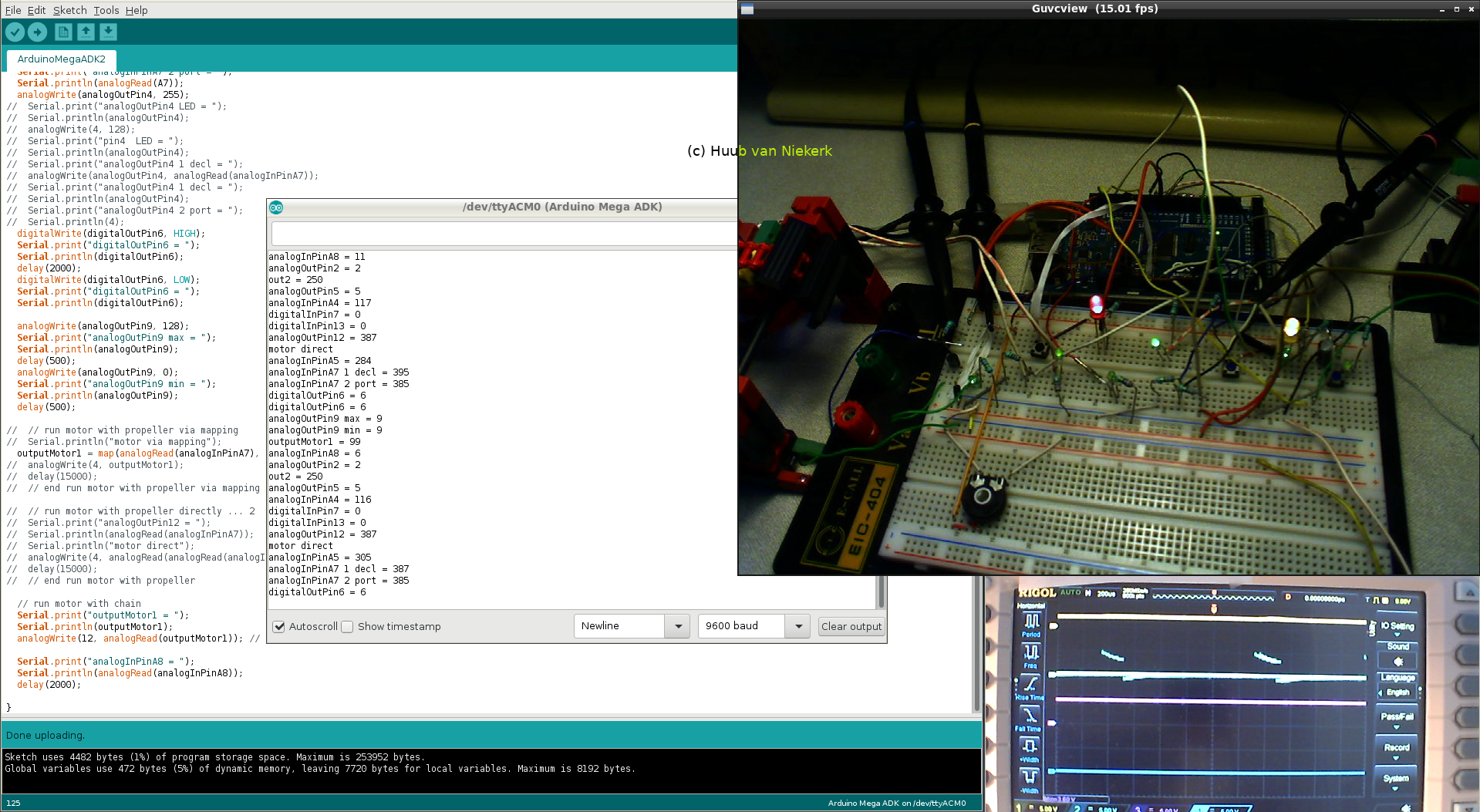
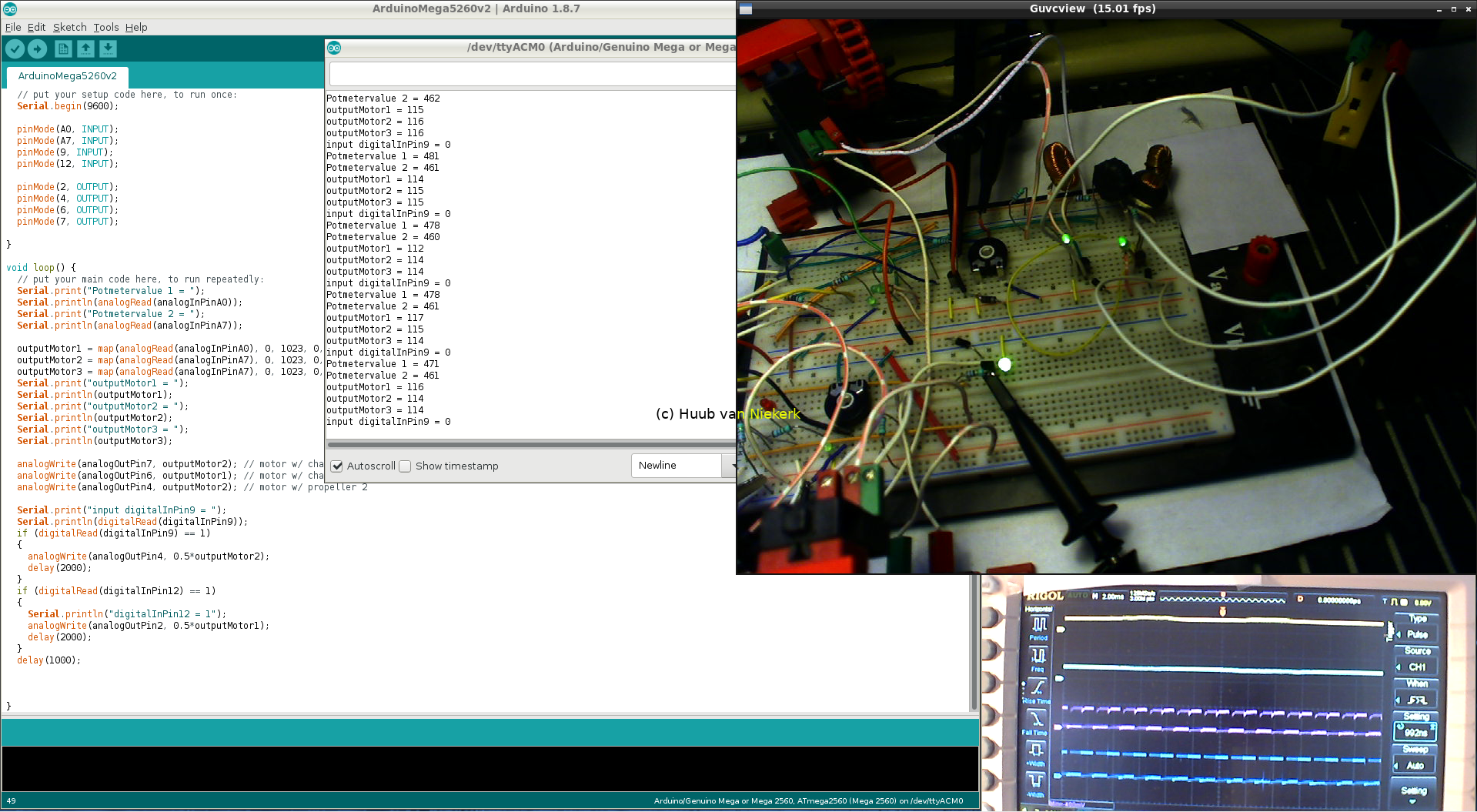
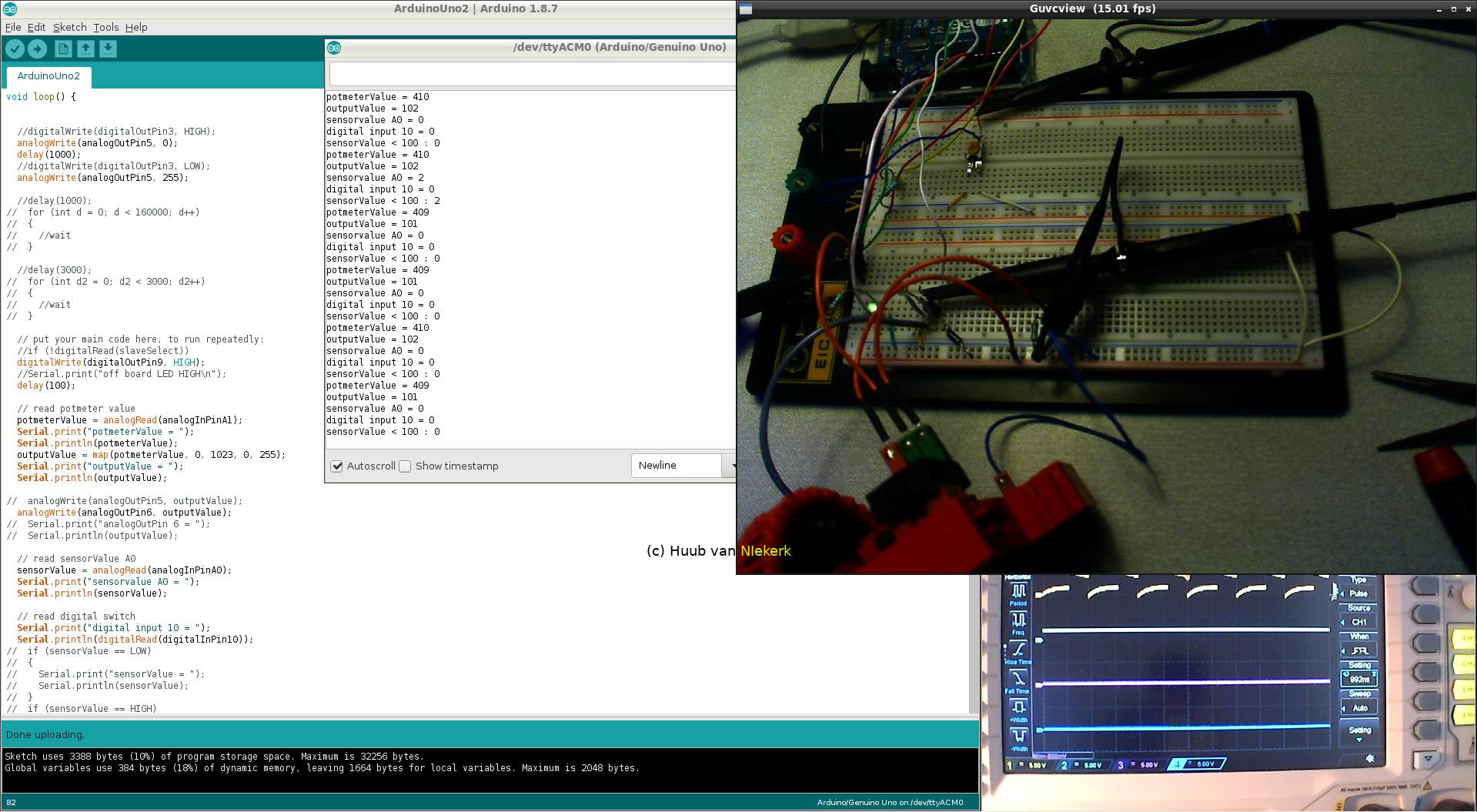
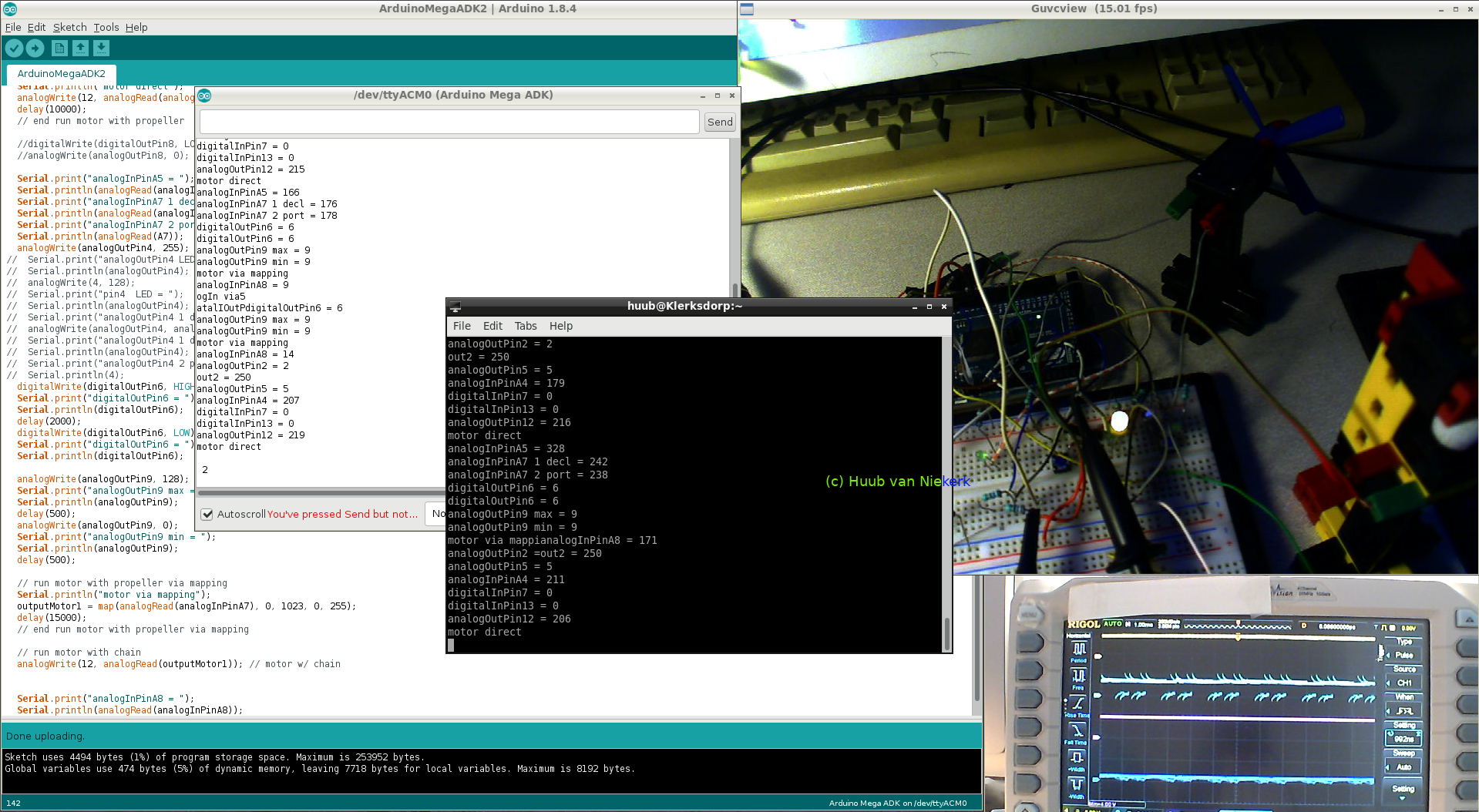
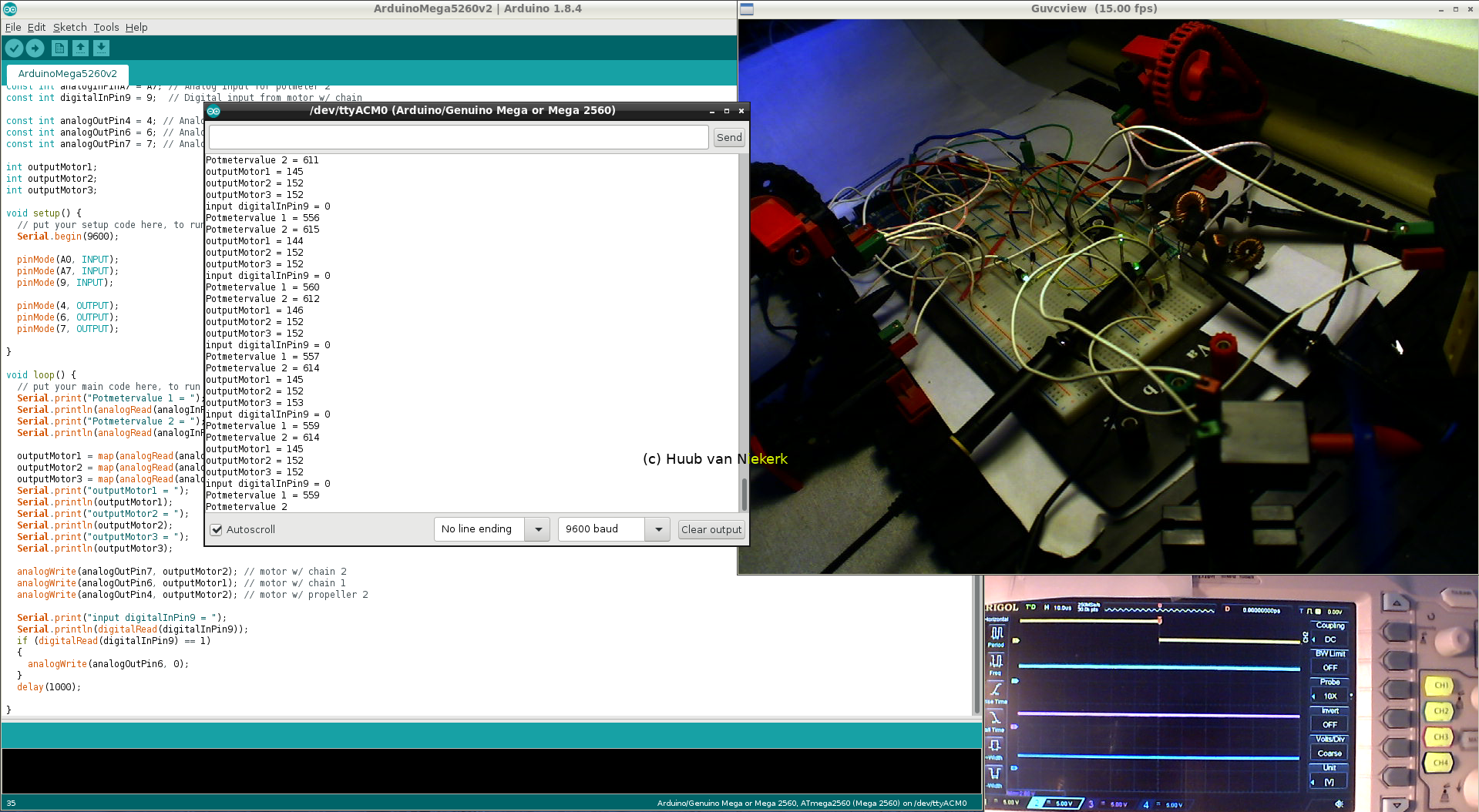
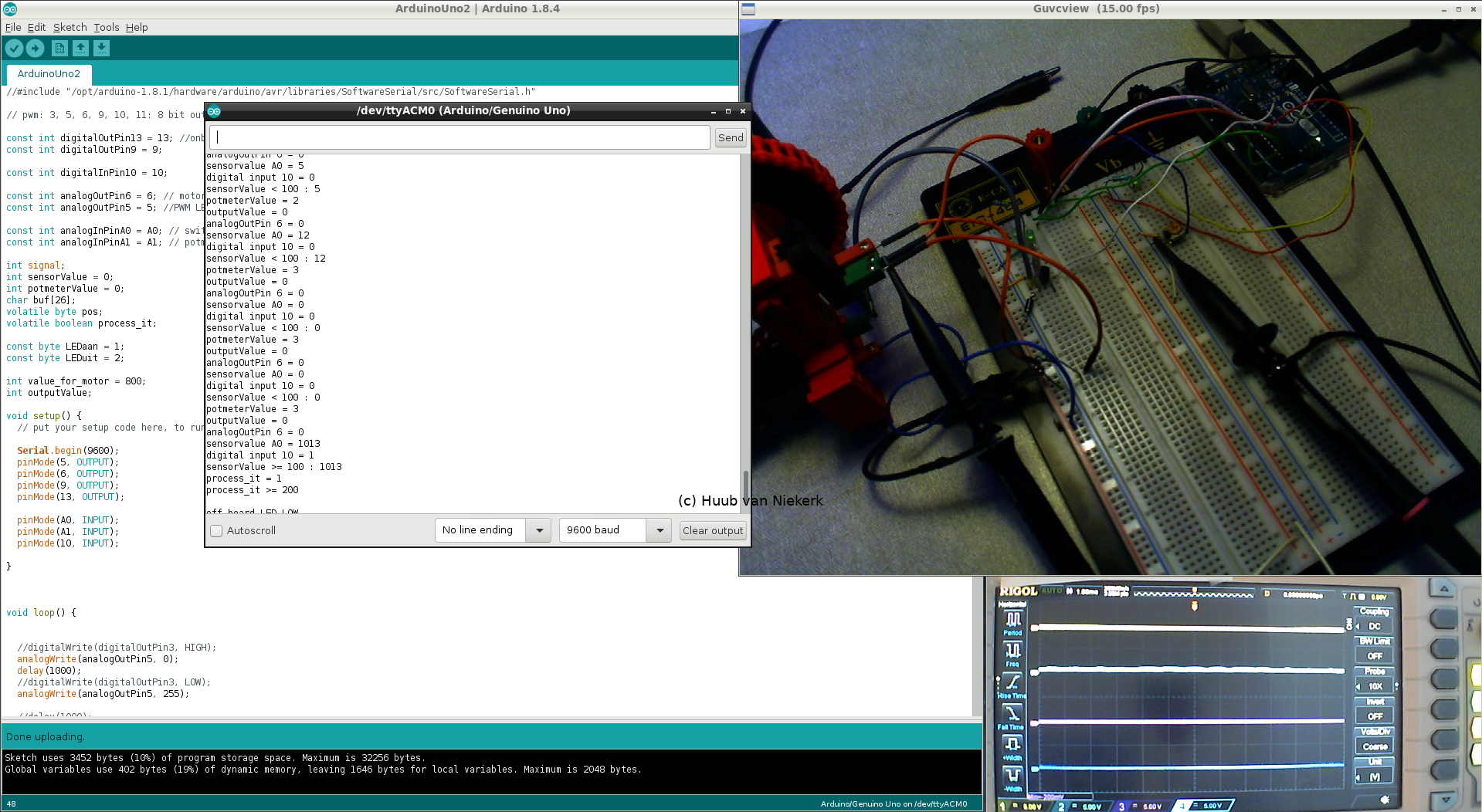
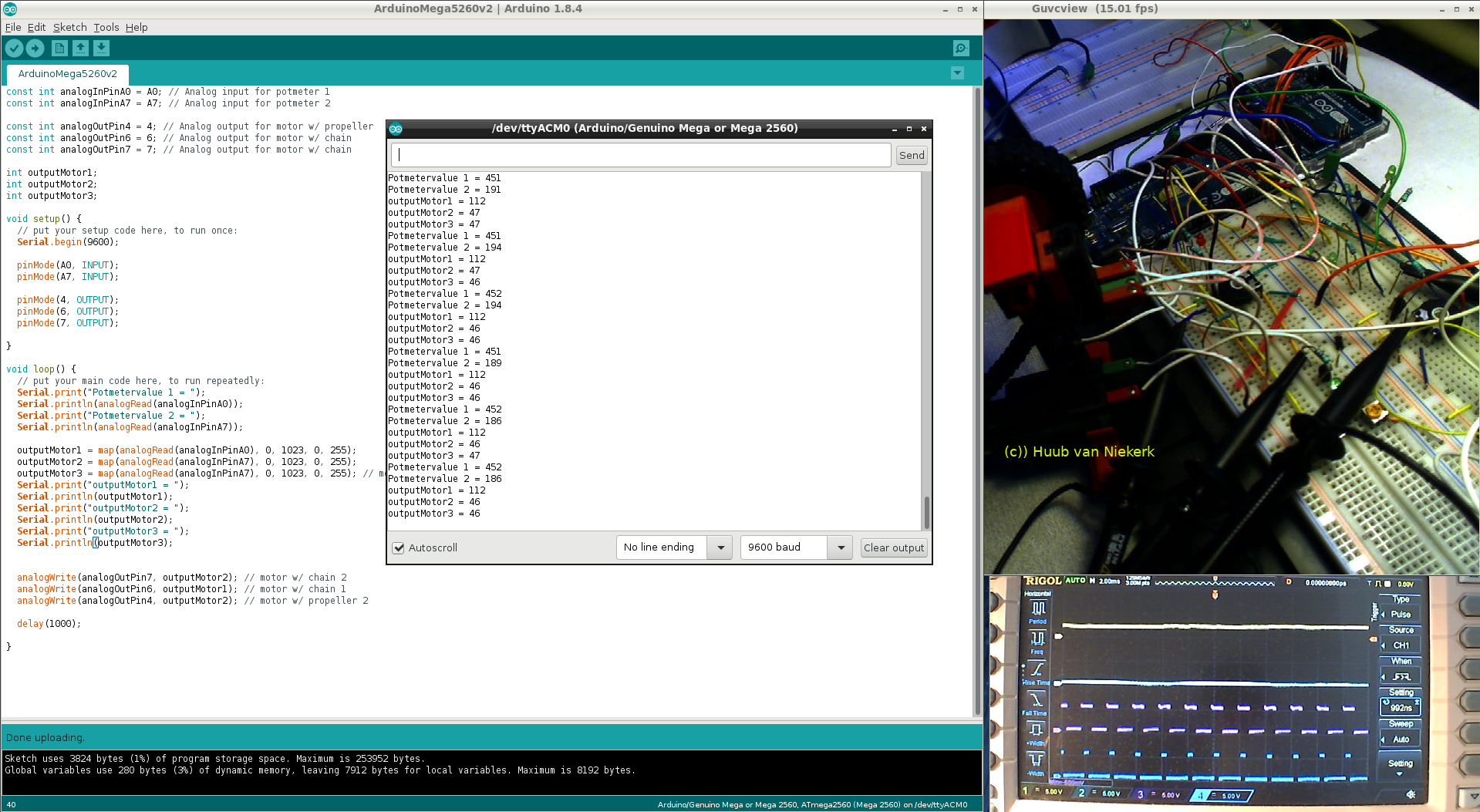
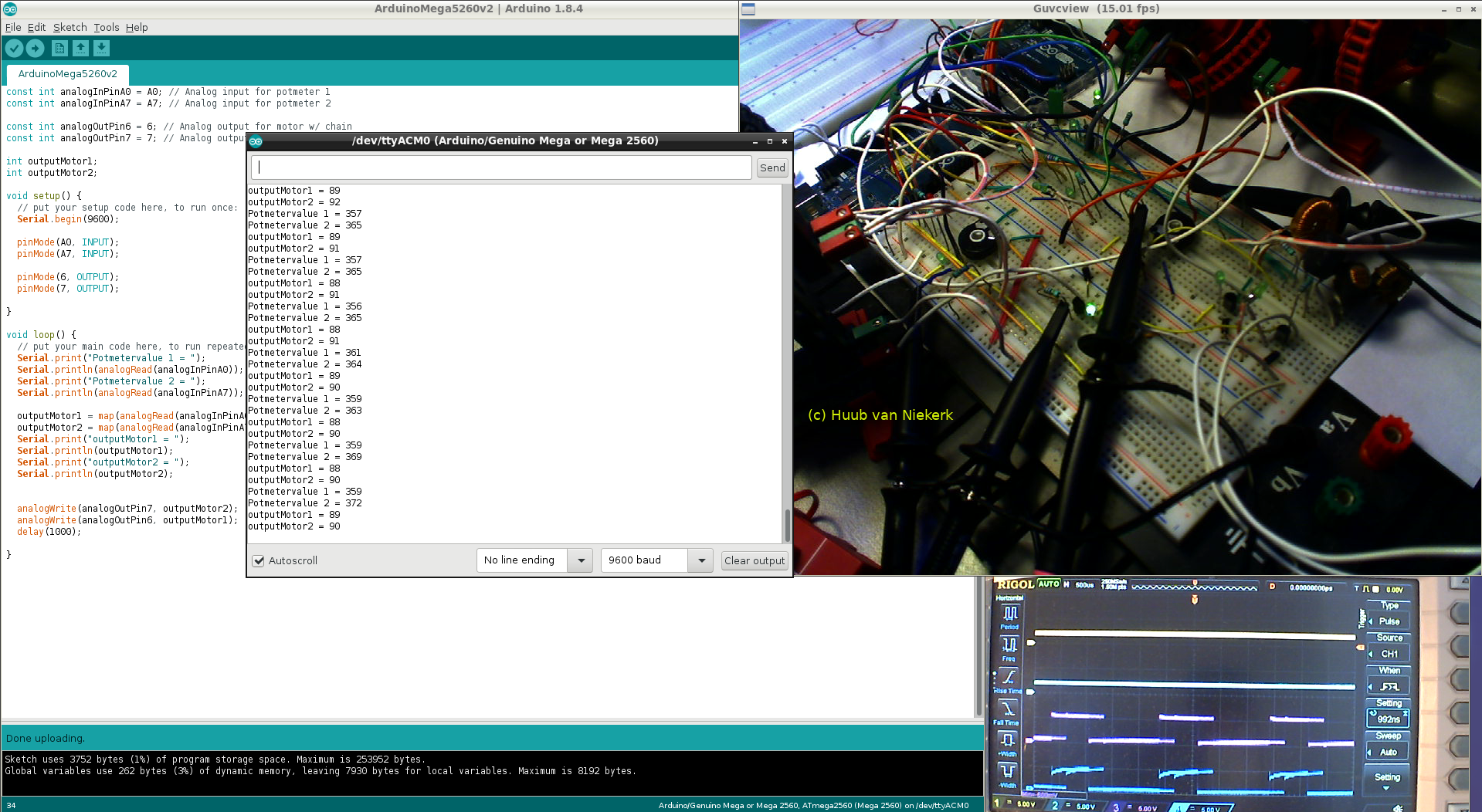
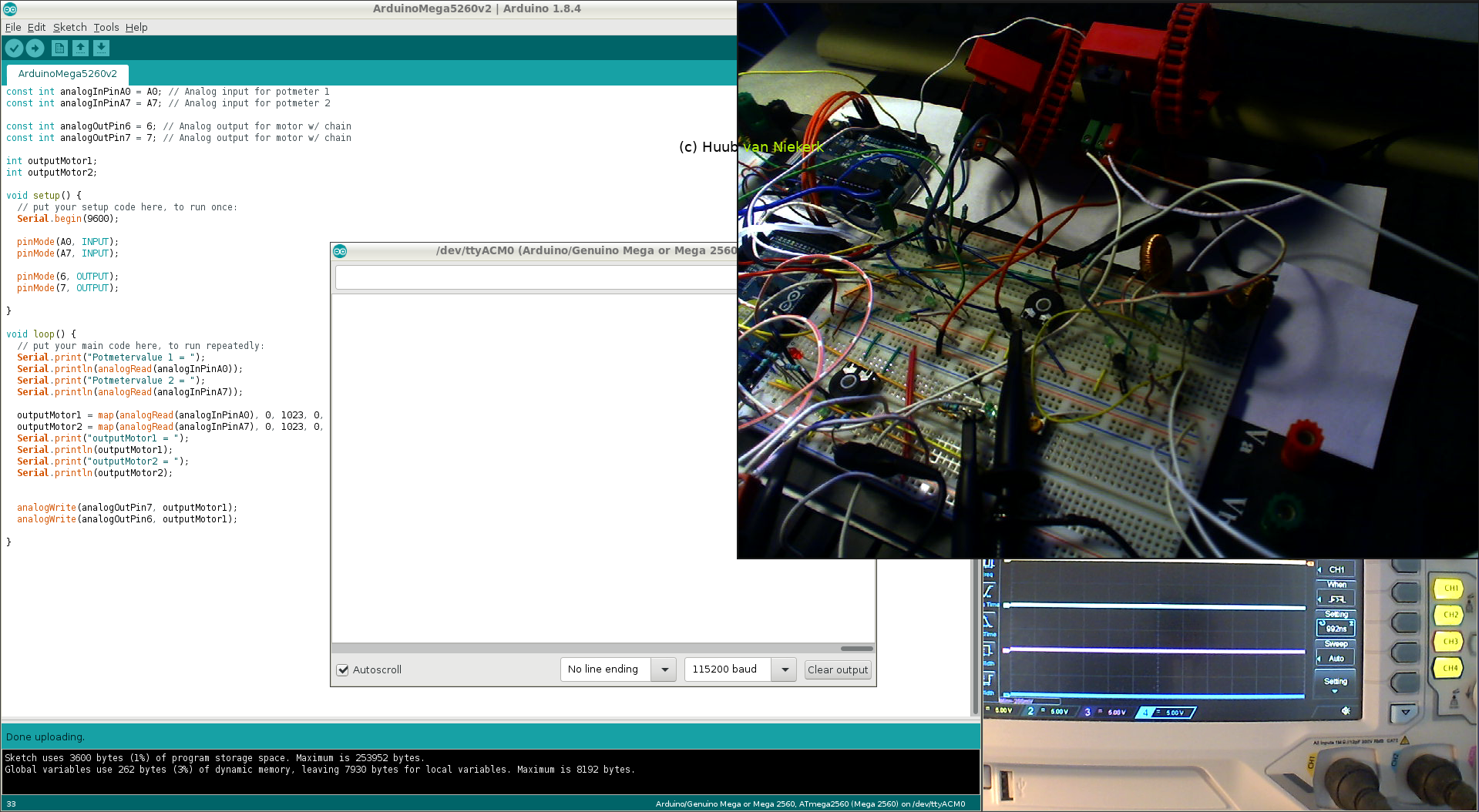
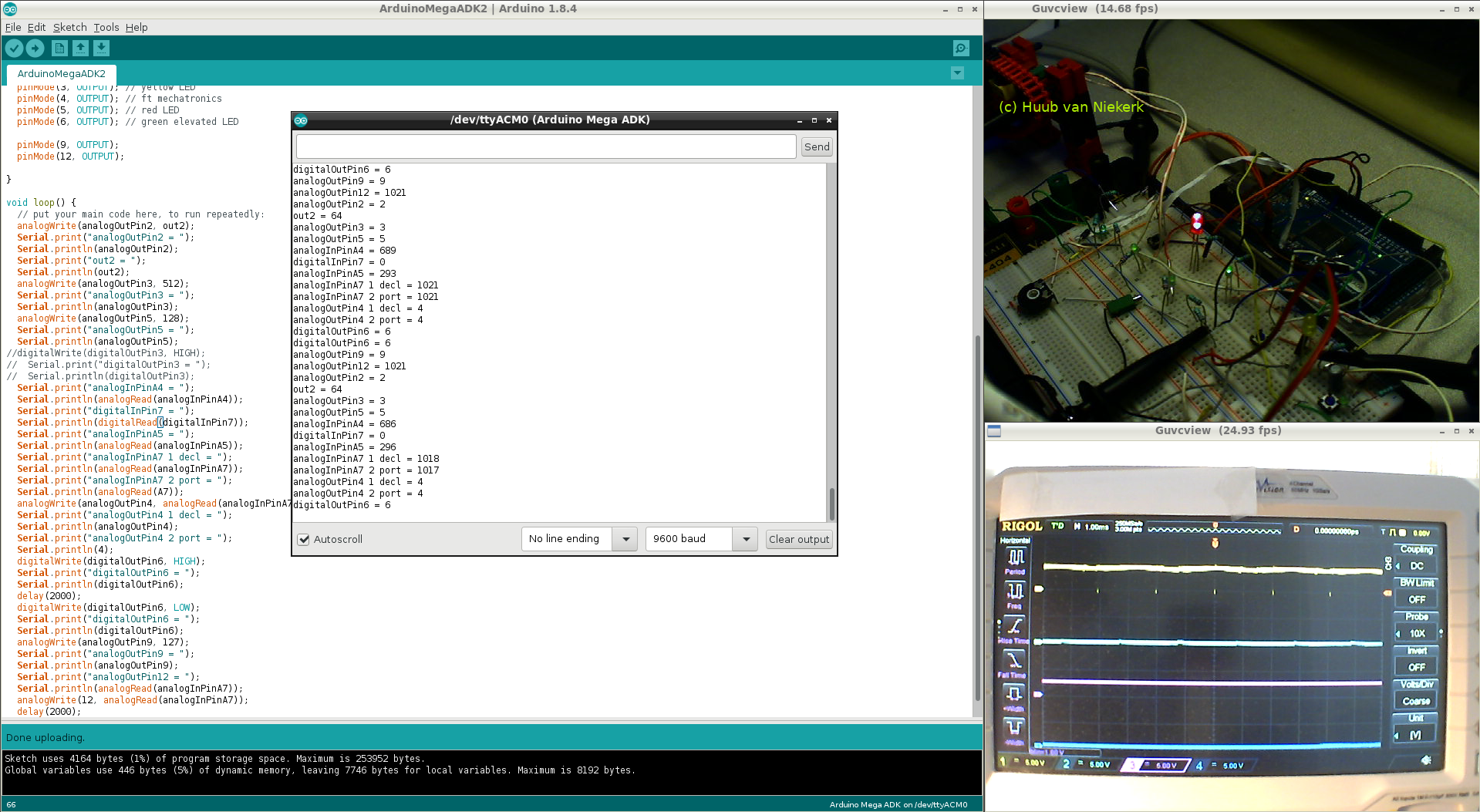
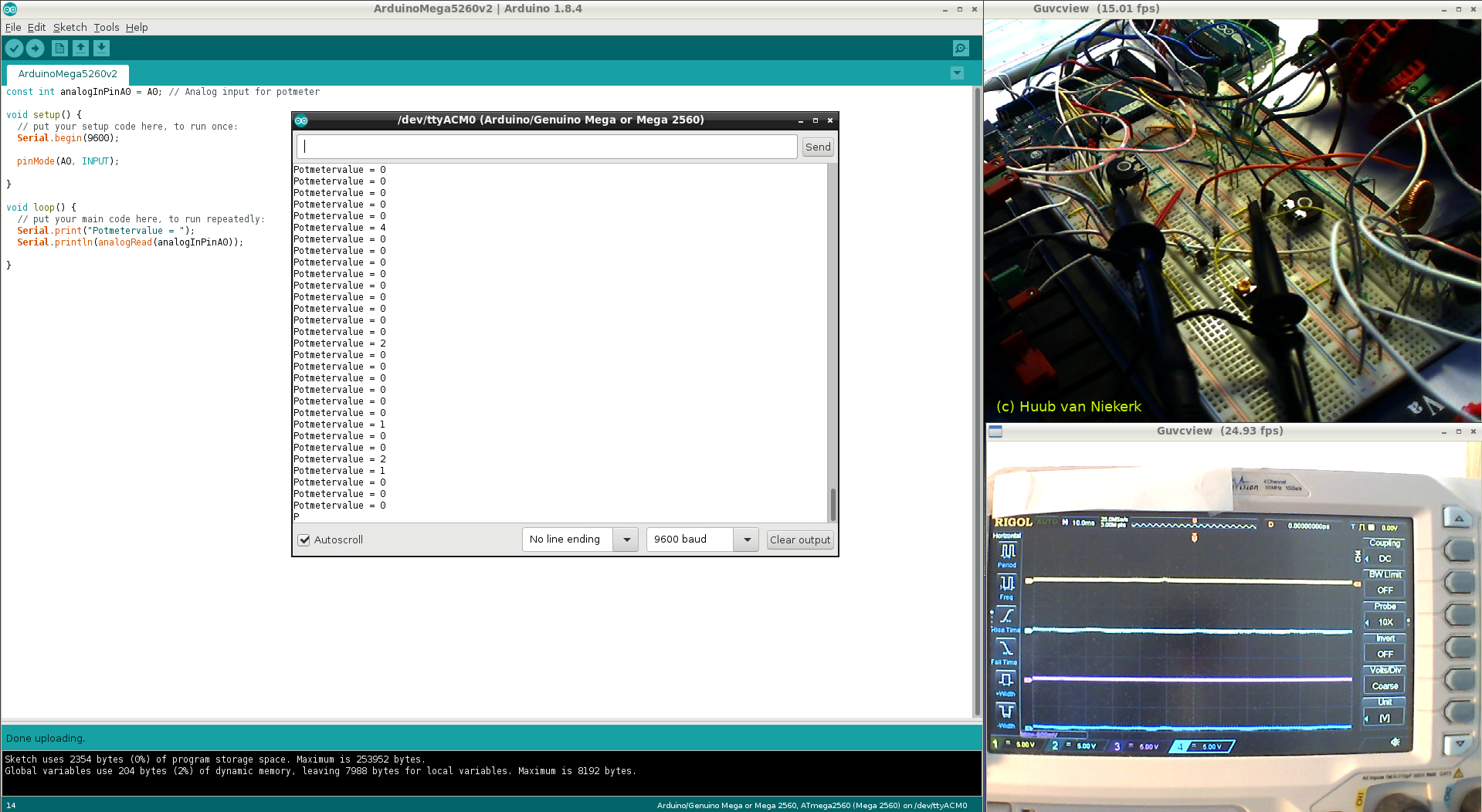
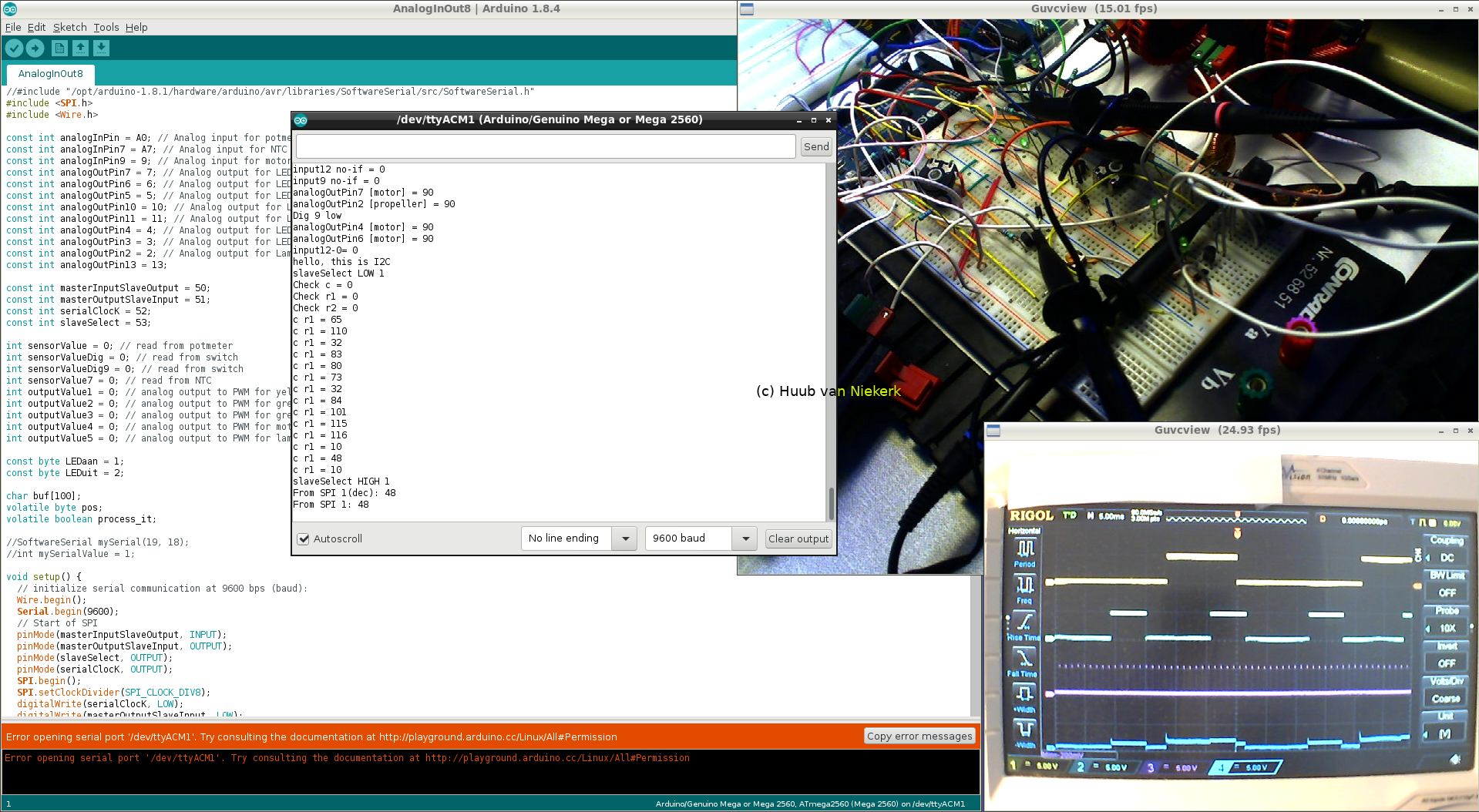
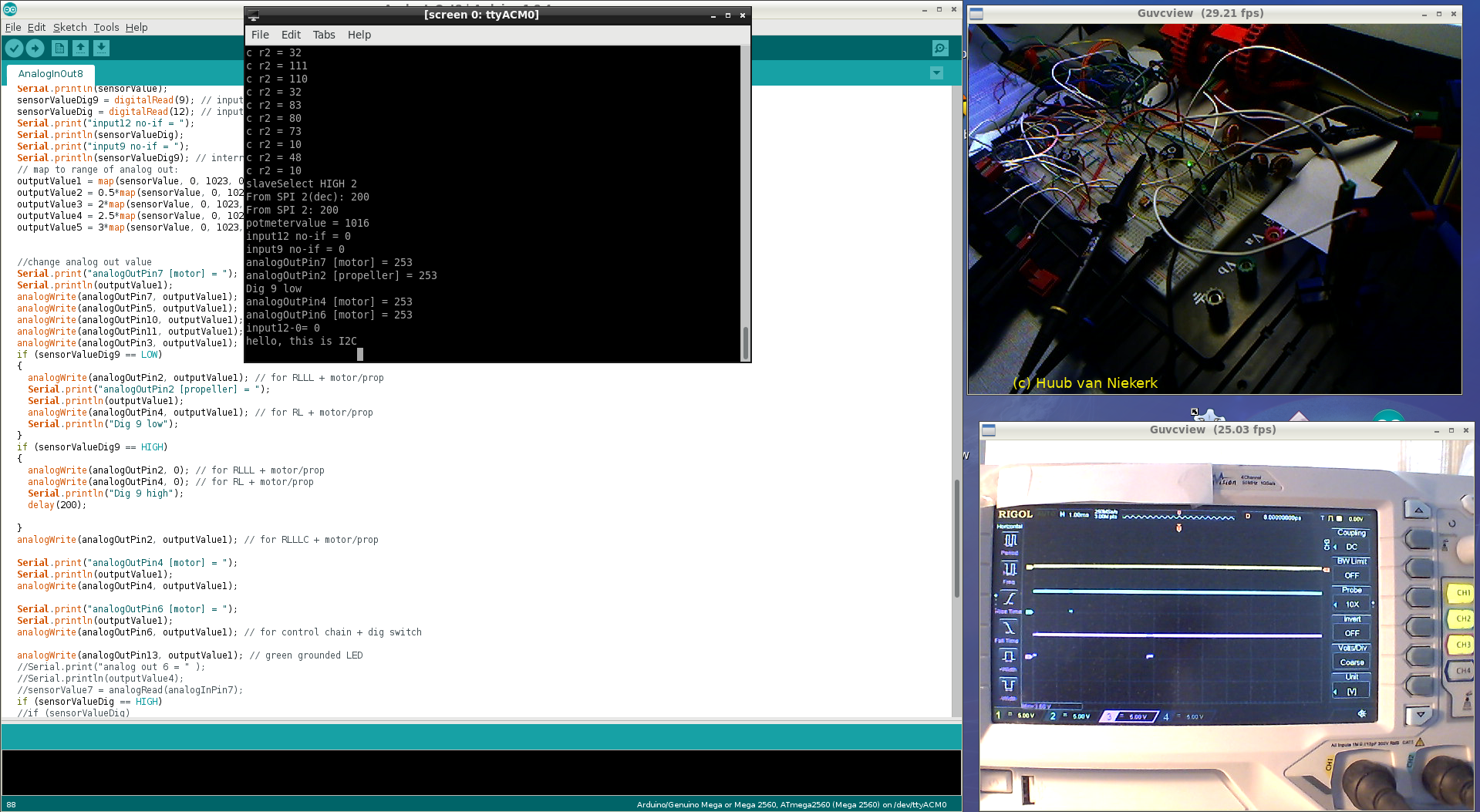
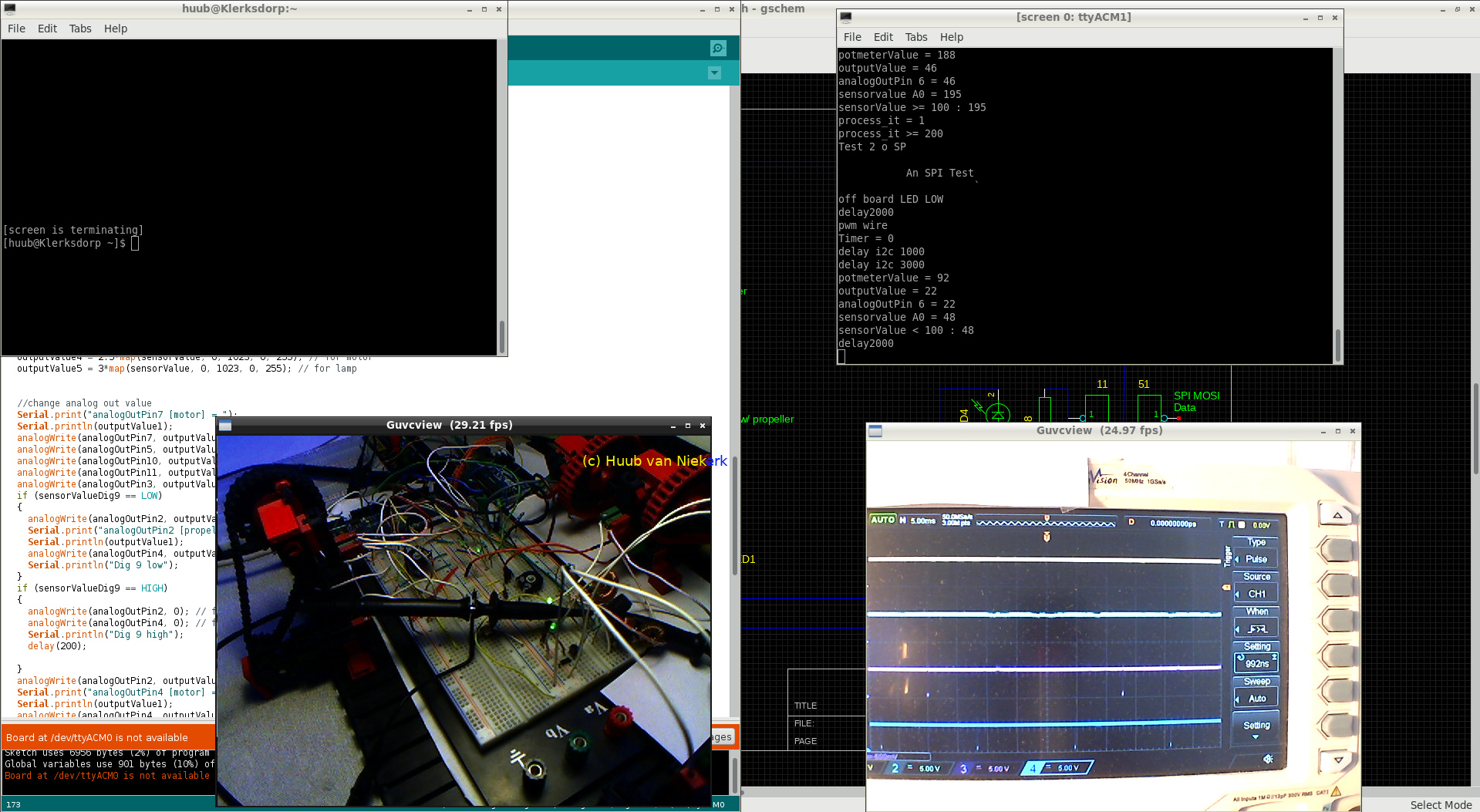
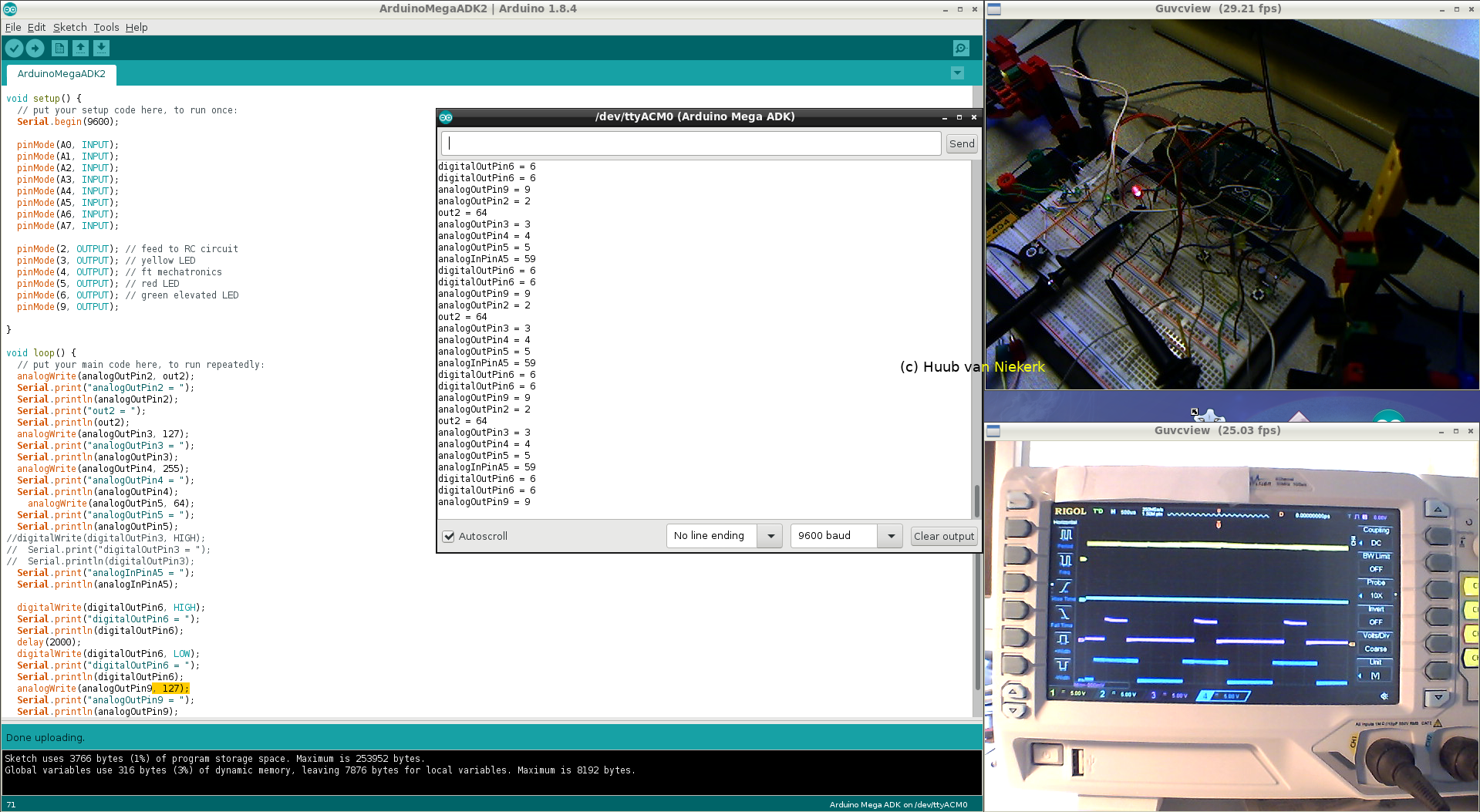
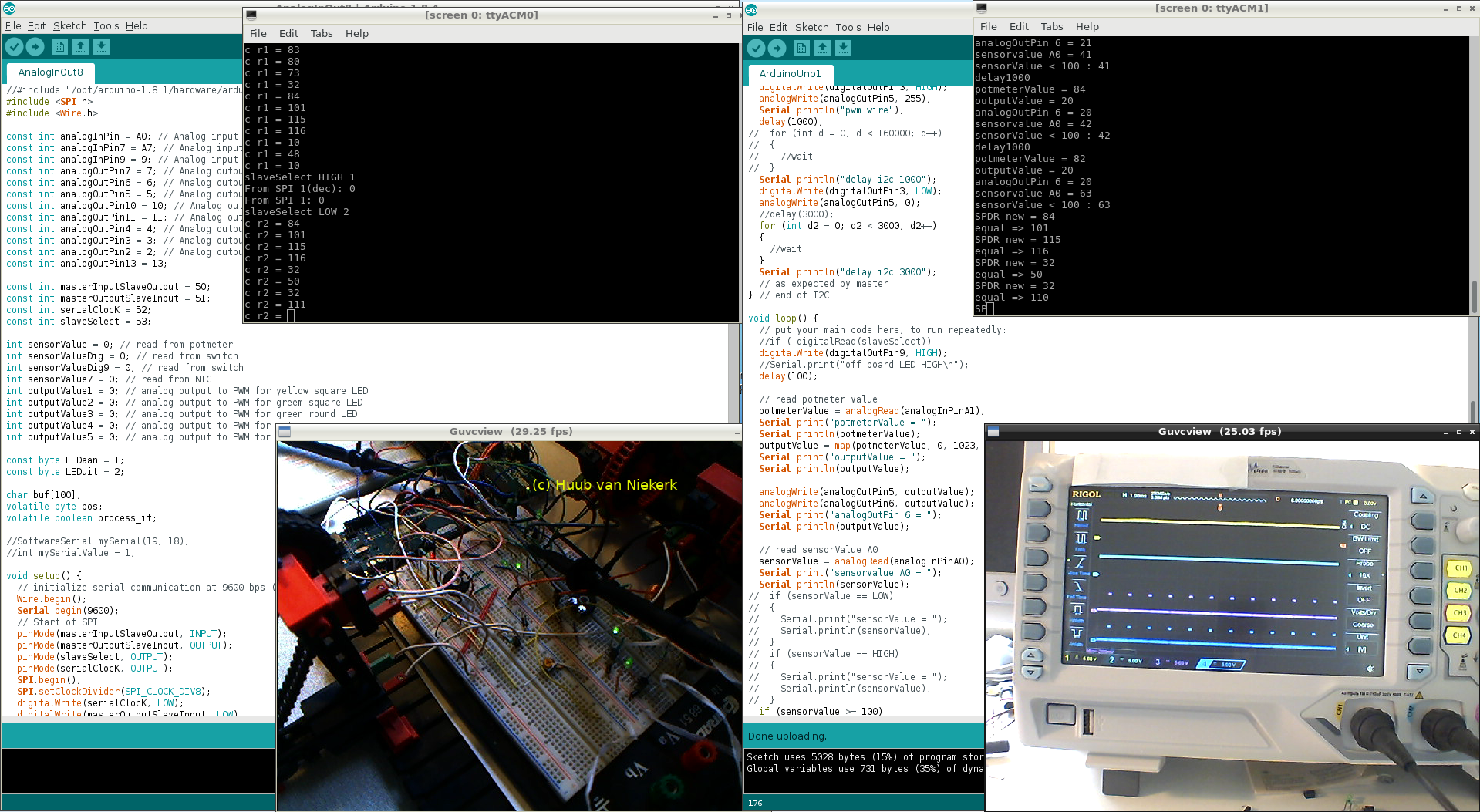
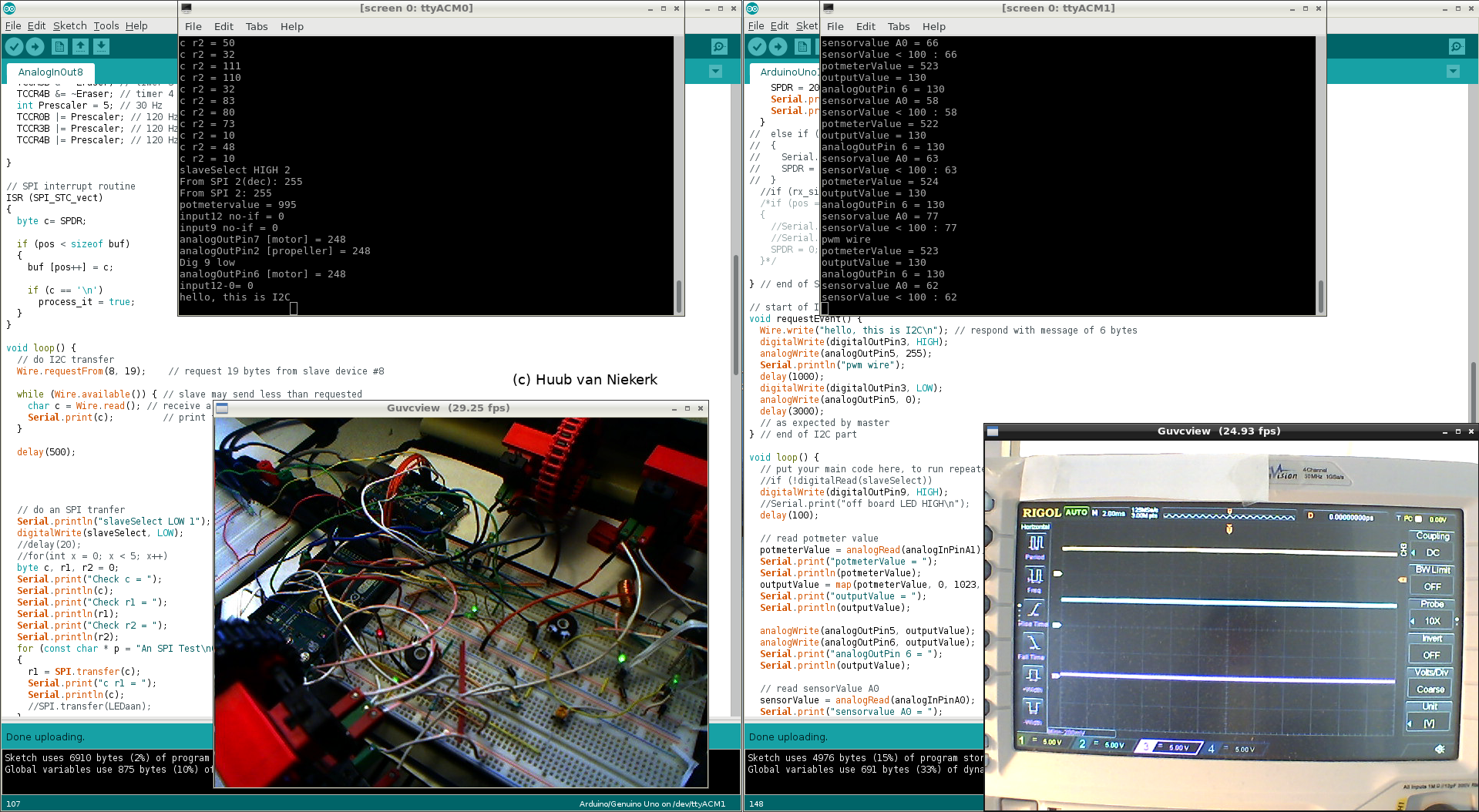
Arduino Mega2560 S2: Focus on Octave again: change the vector and algorithm to check data. Adding an LED which goes bad, but how come? Oscilloscope shows good values. Click the image to watch the video.
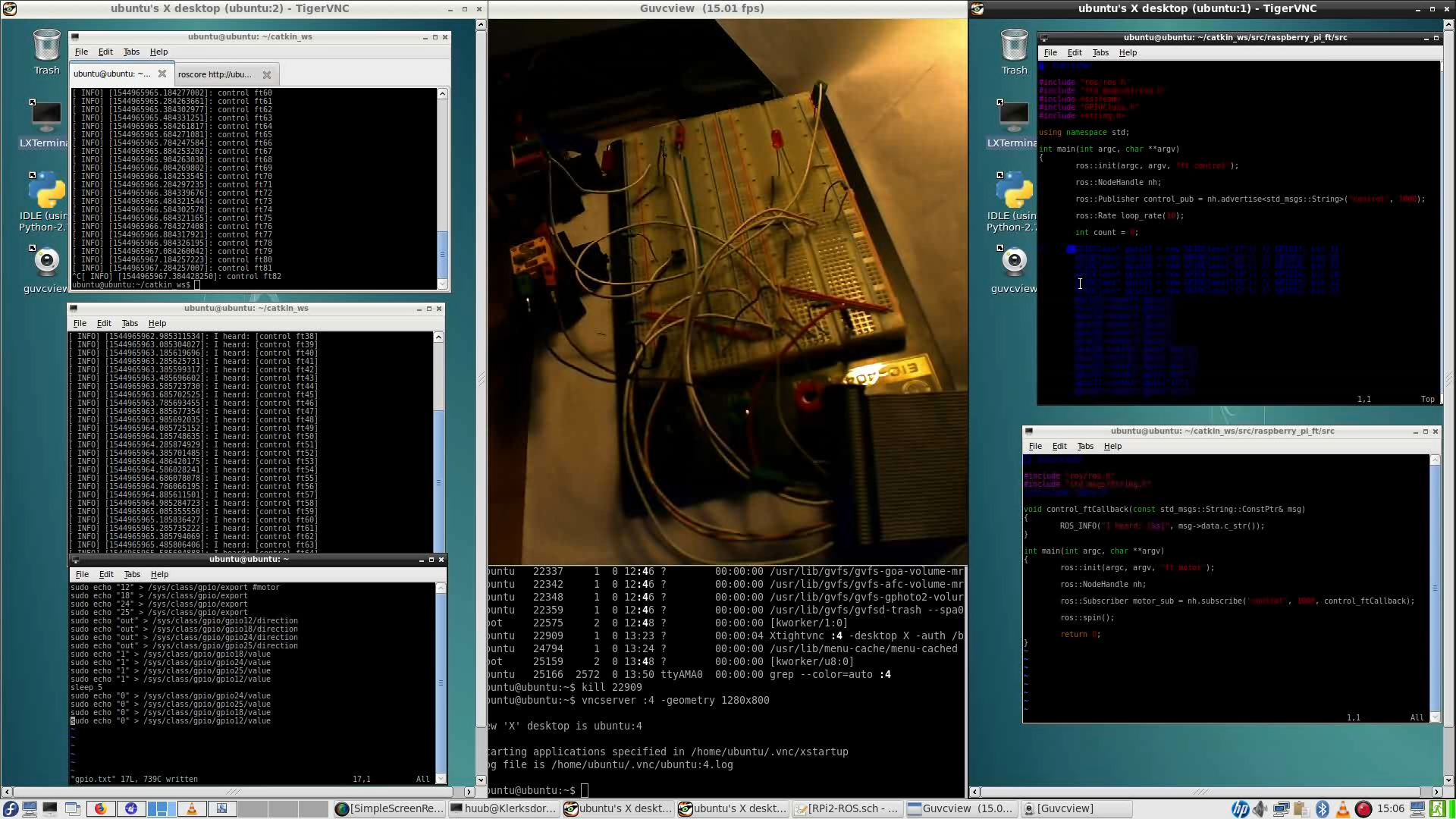
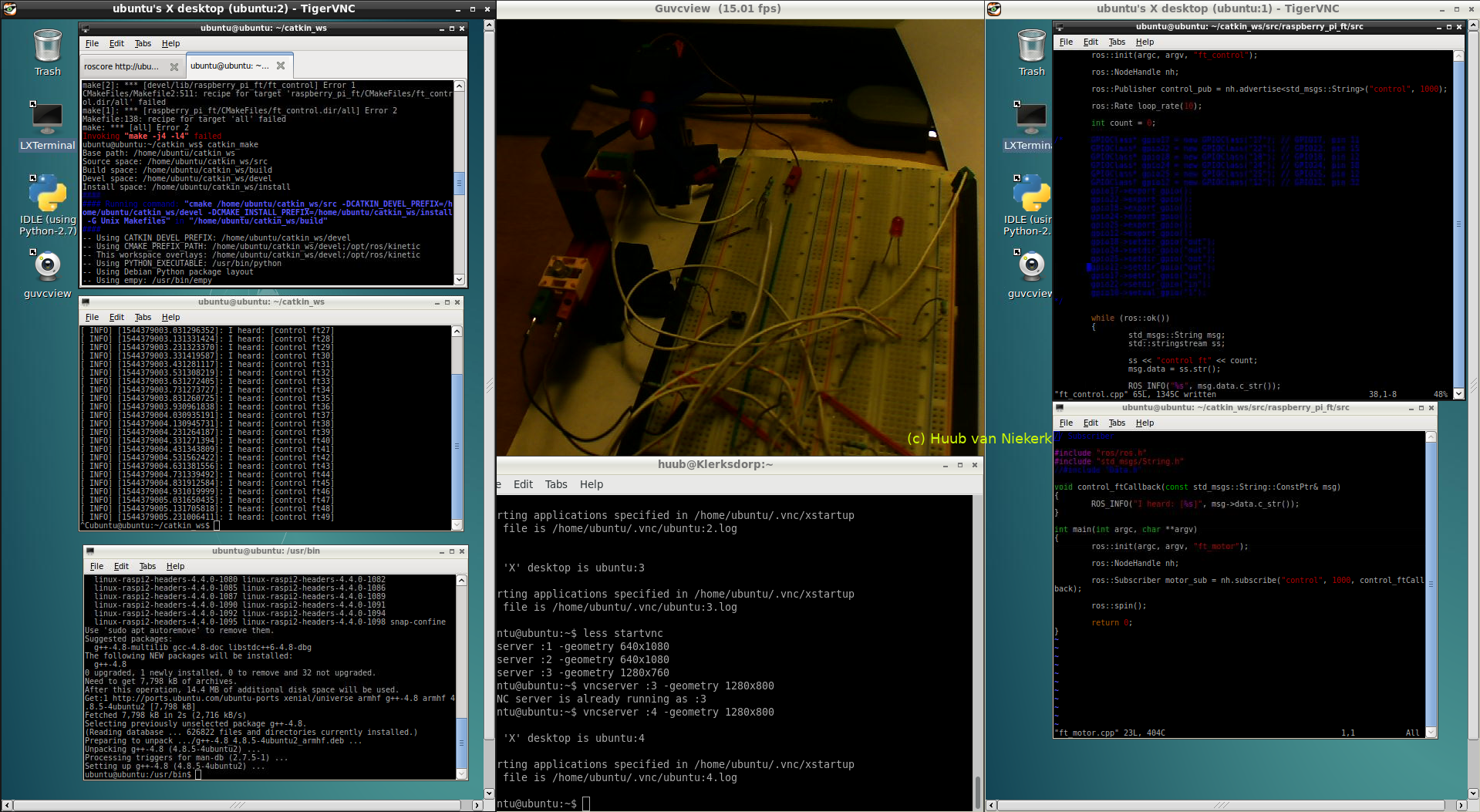
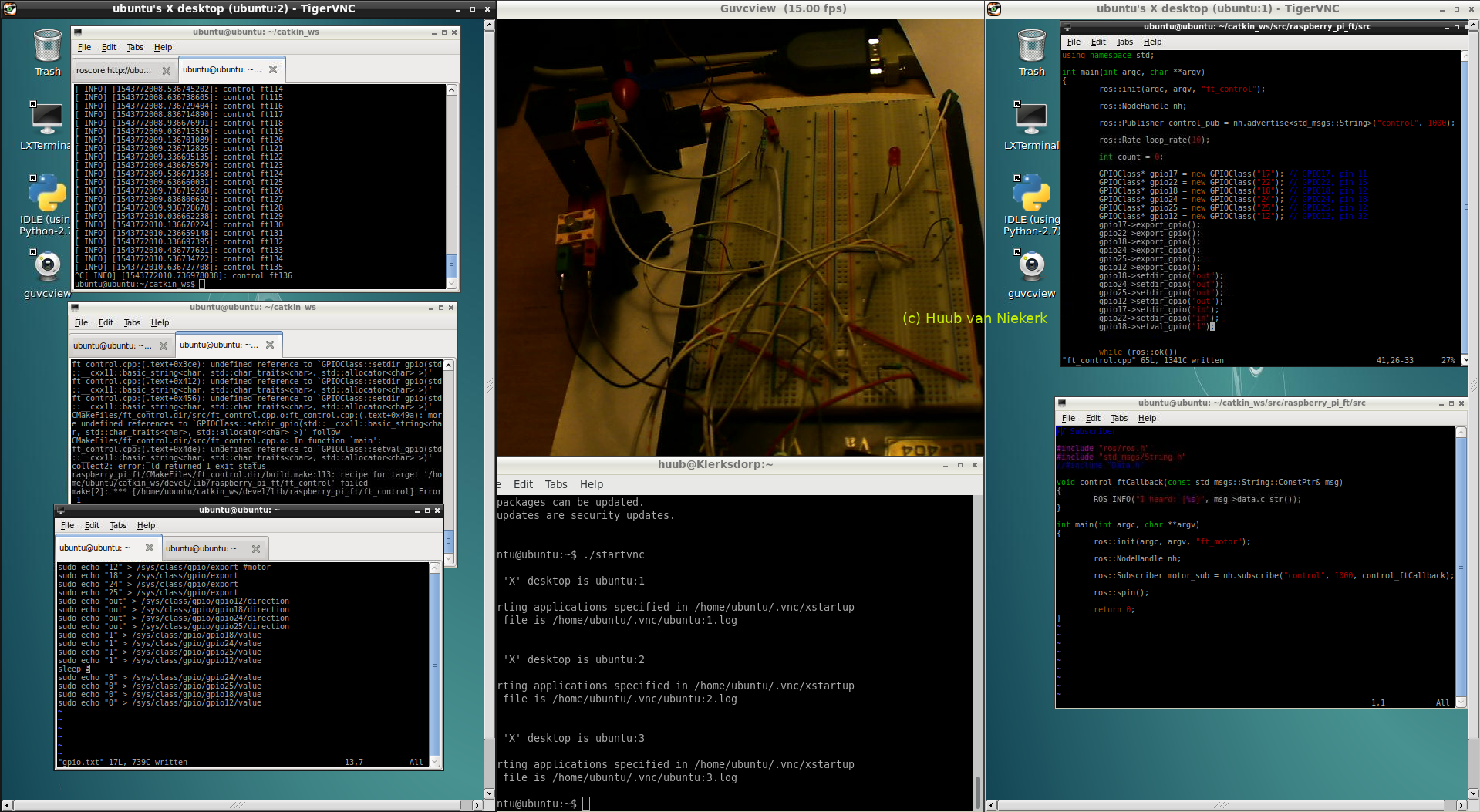
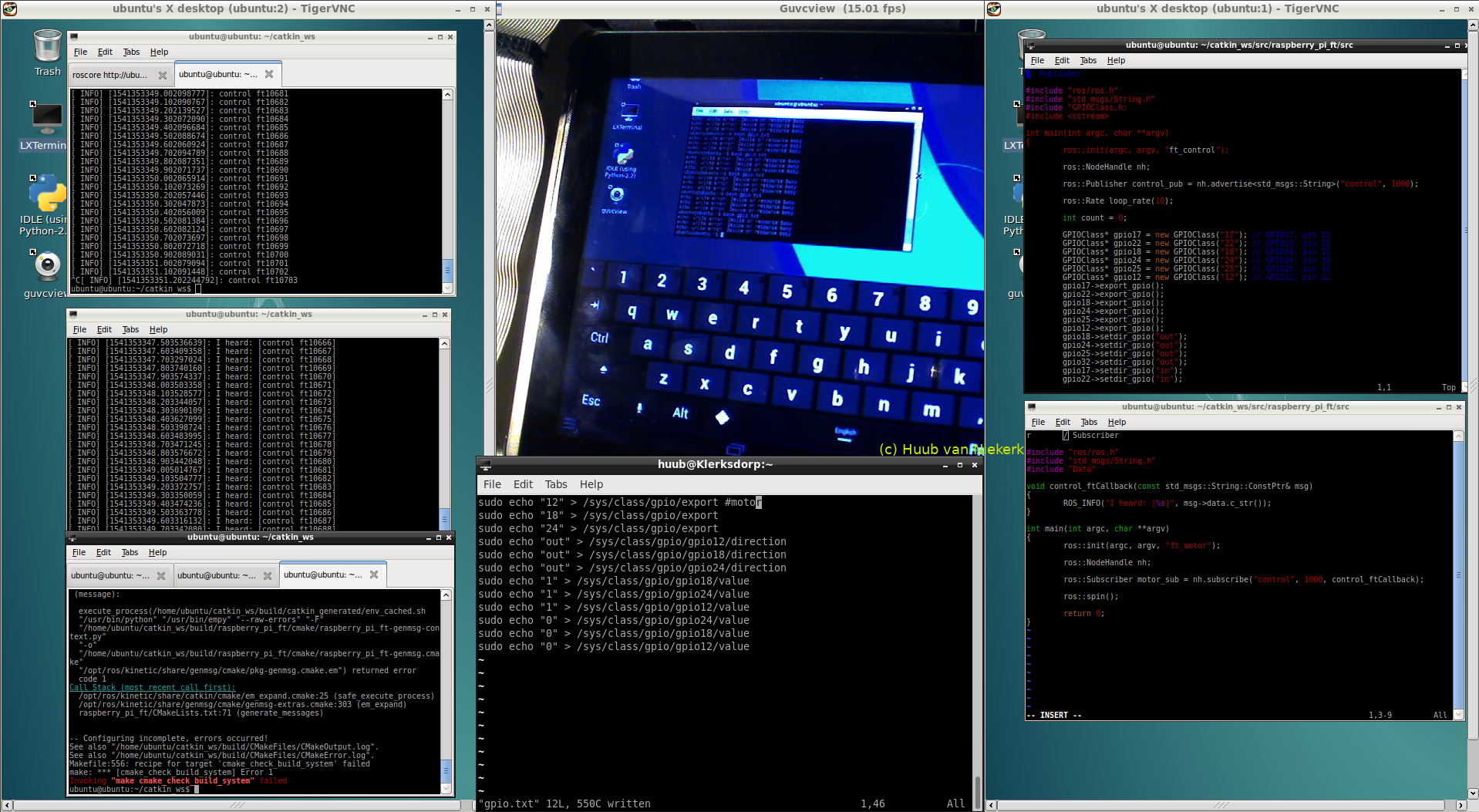
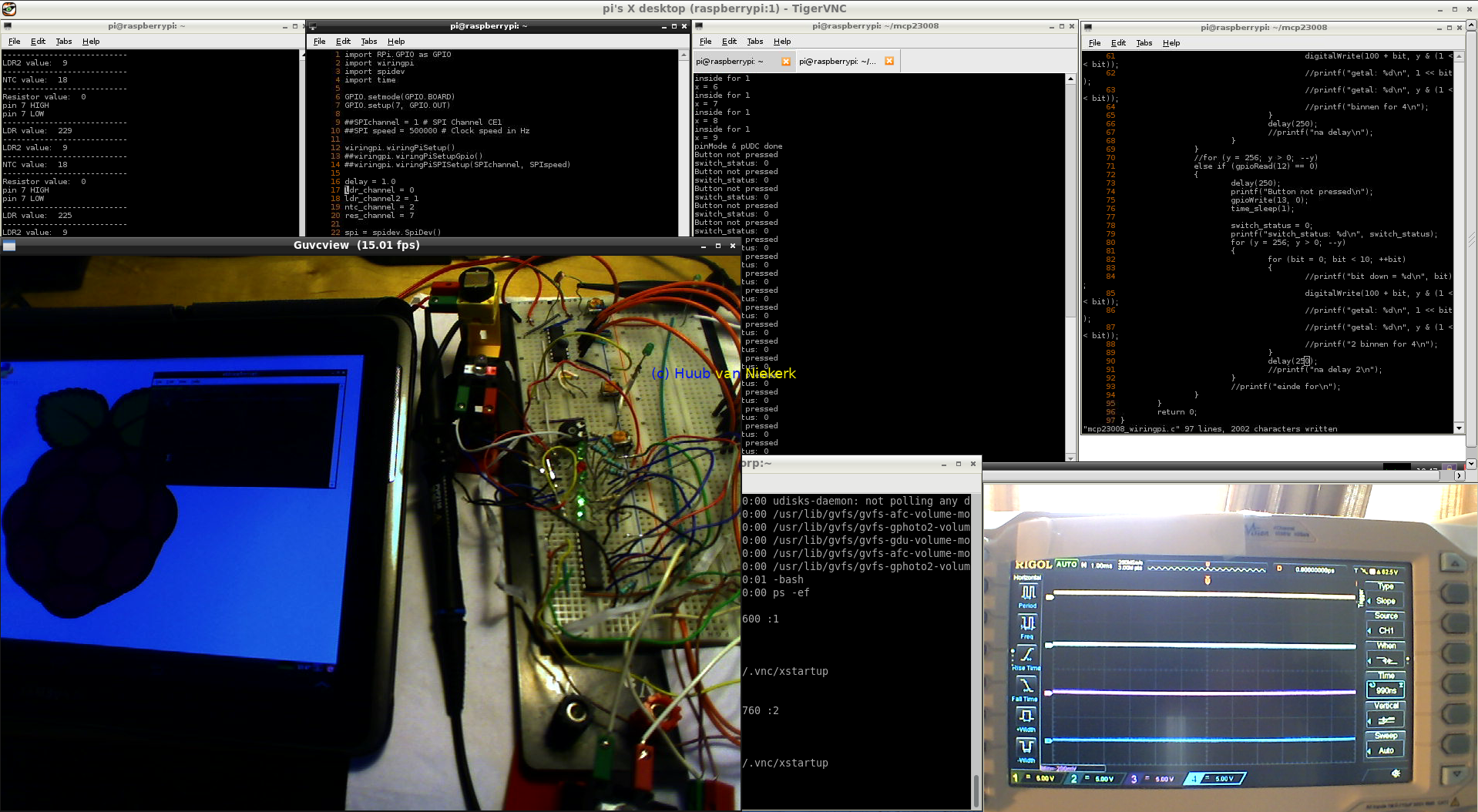
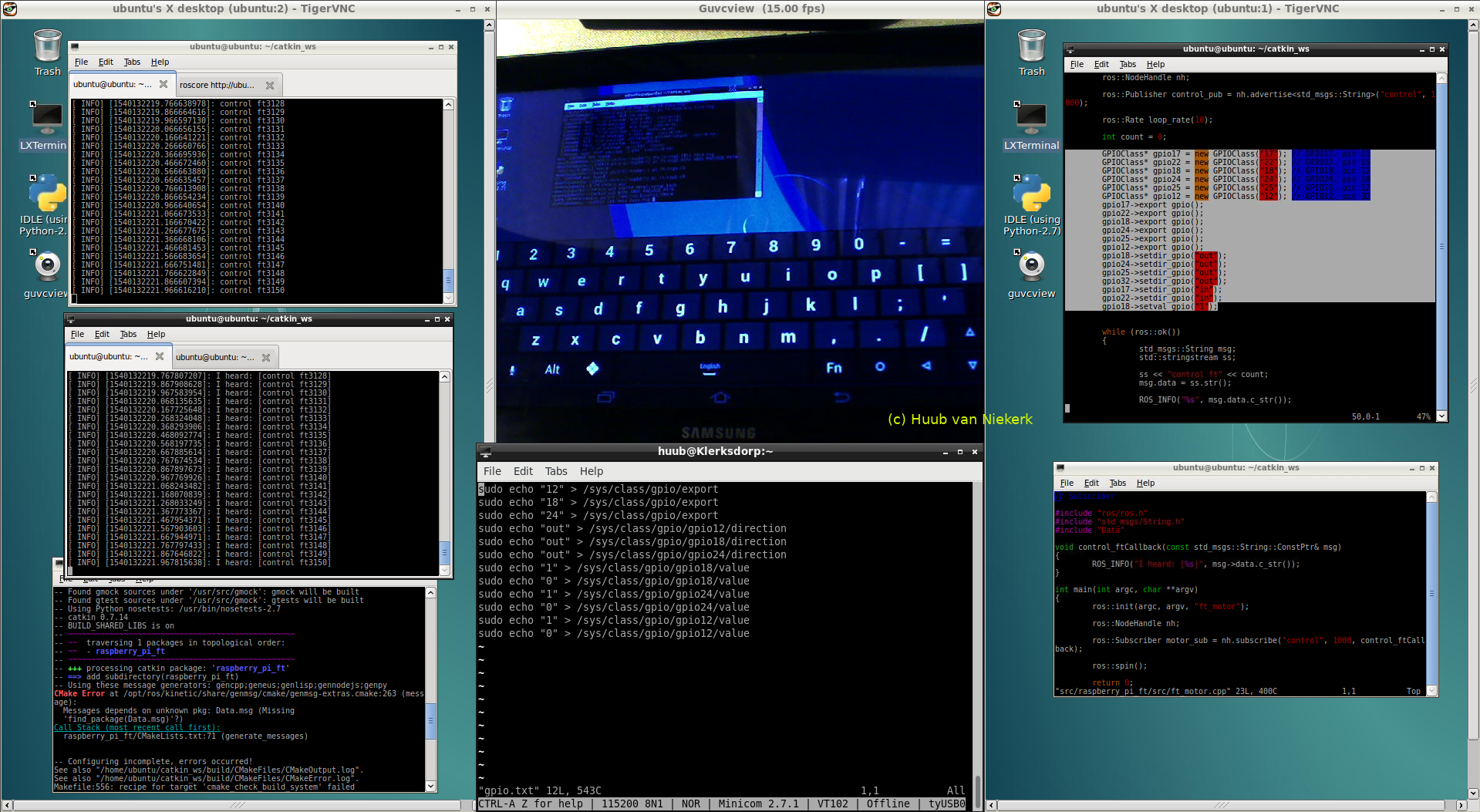
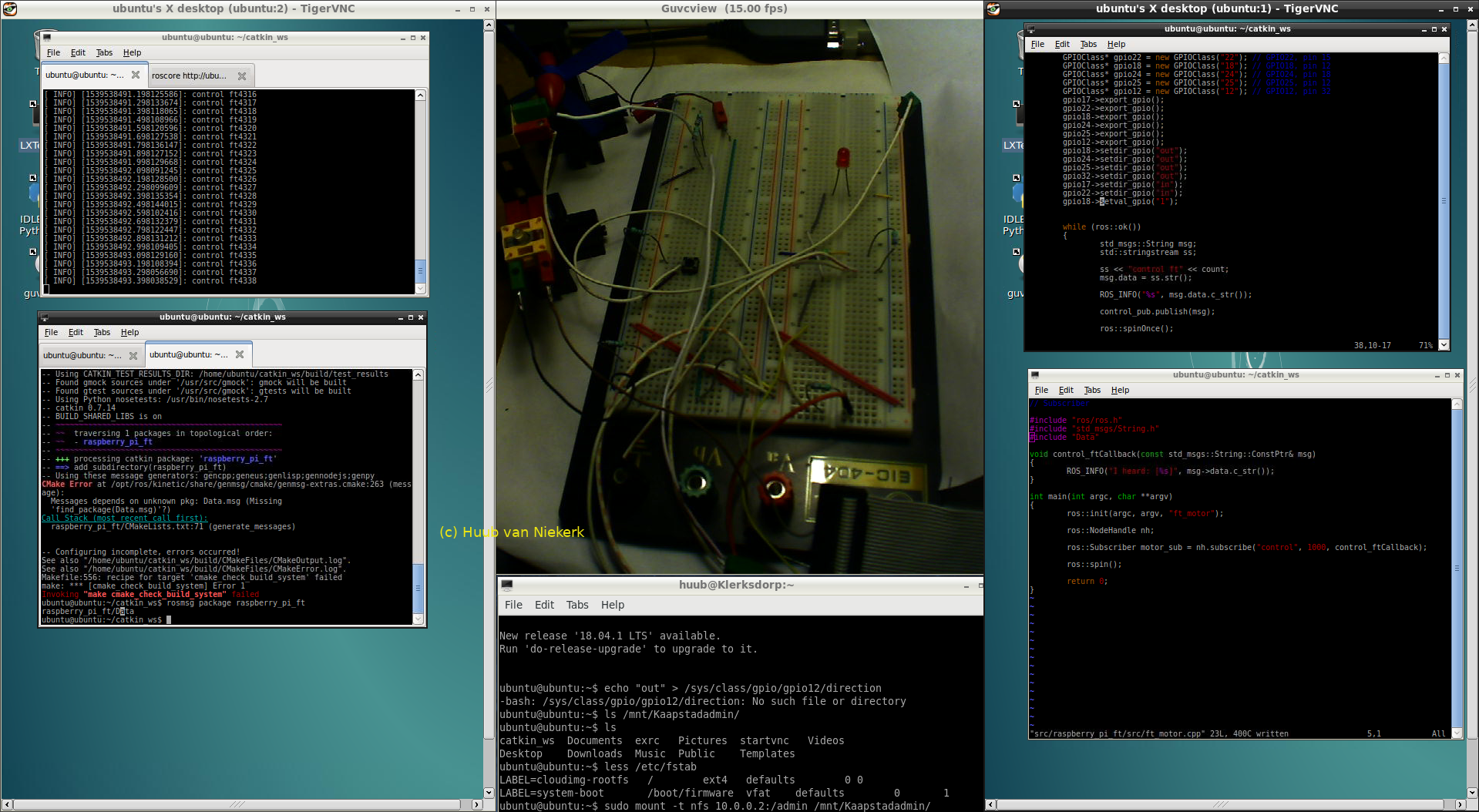
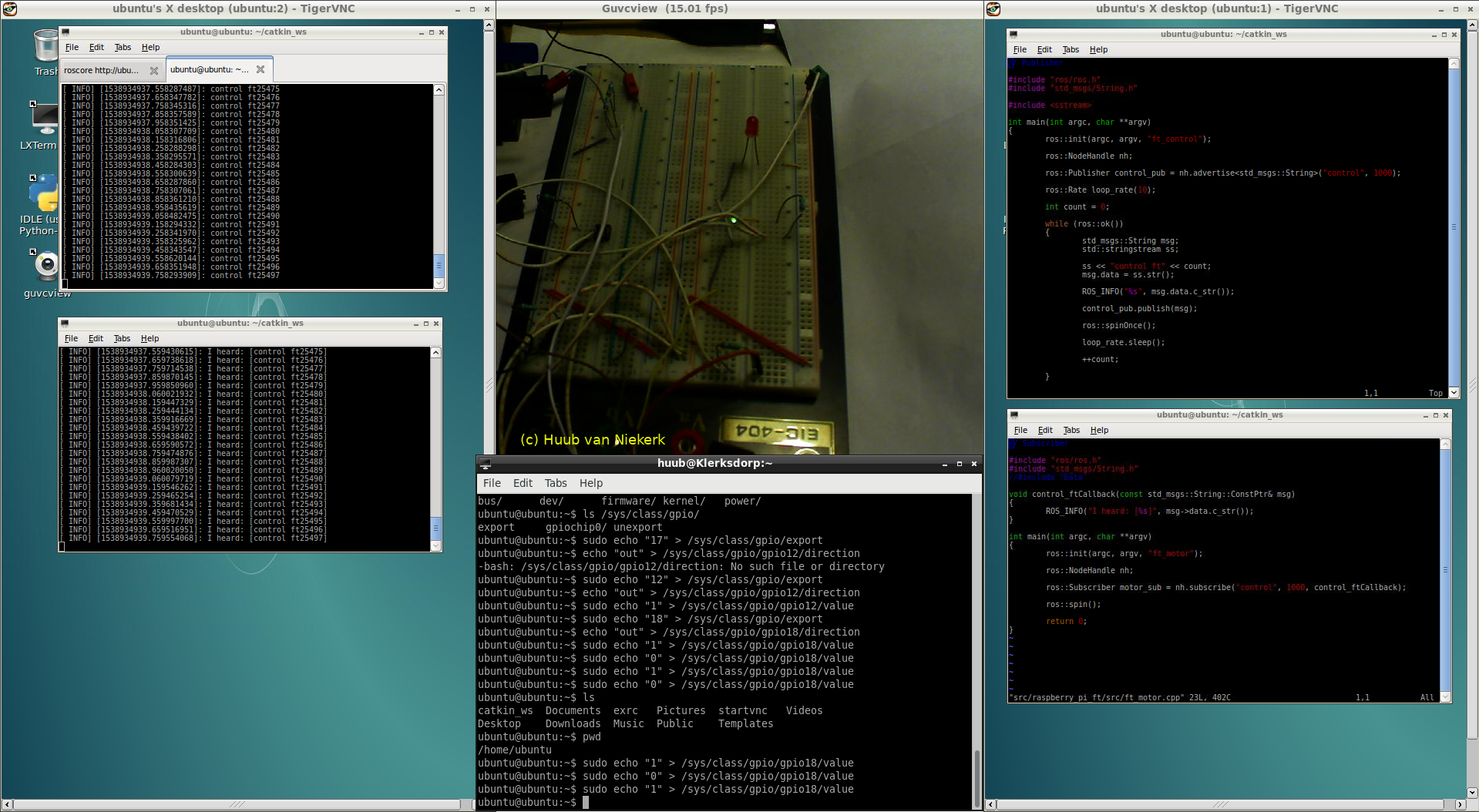
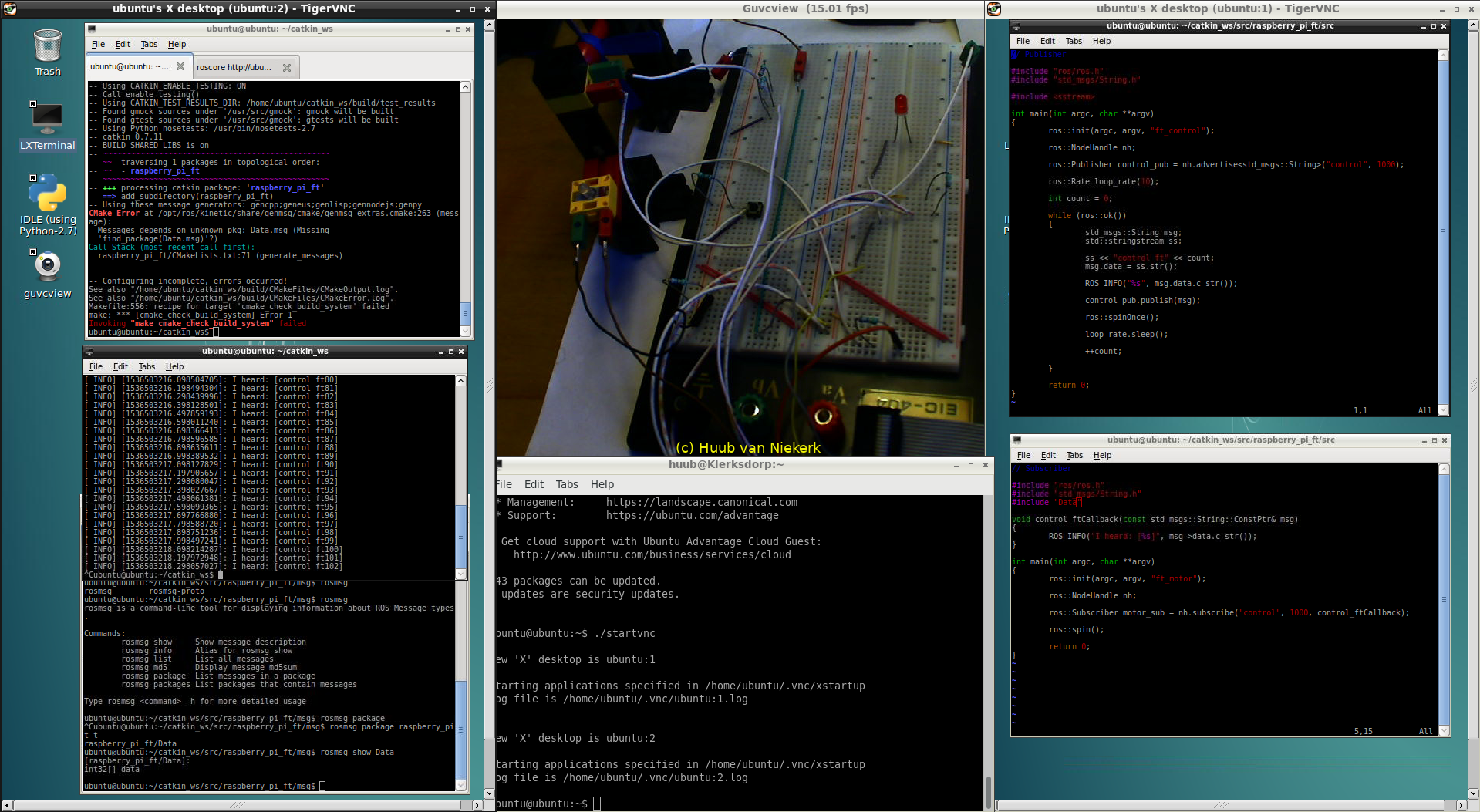
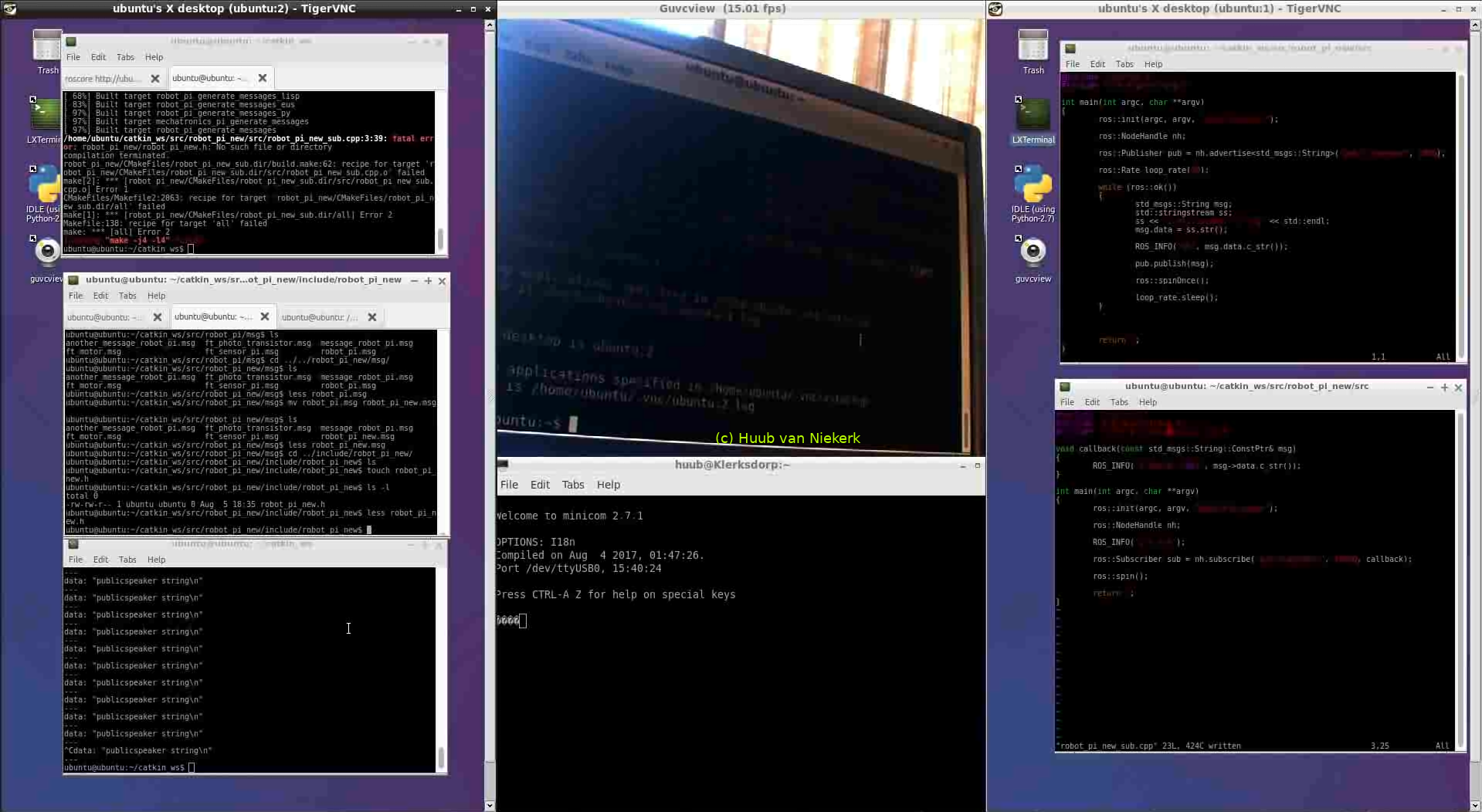
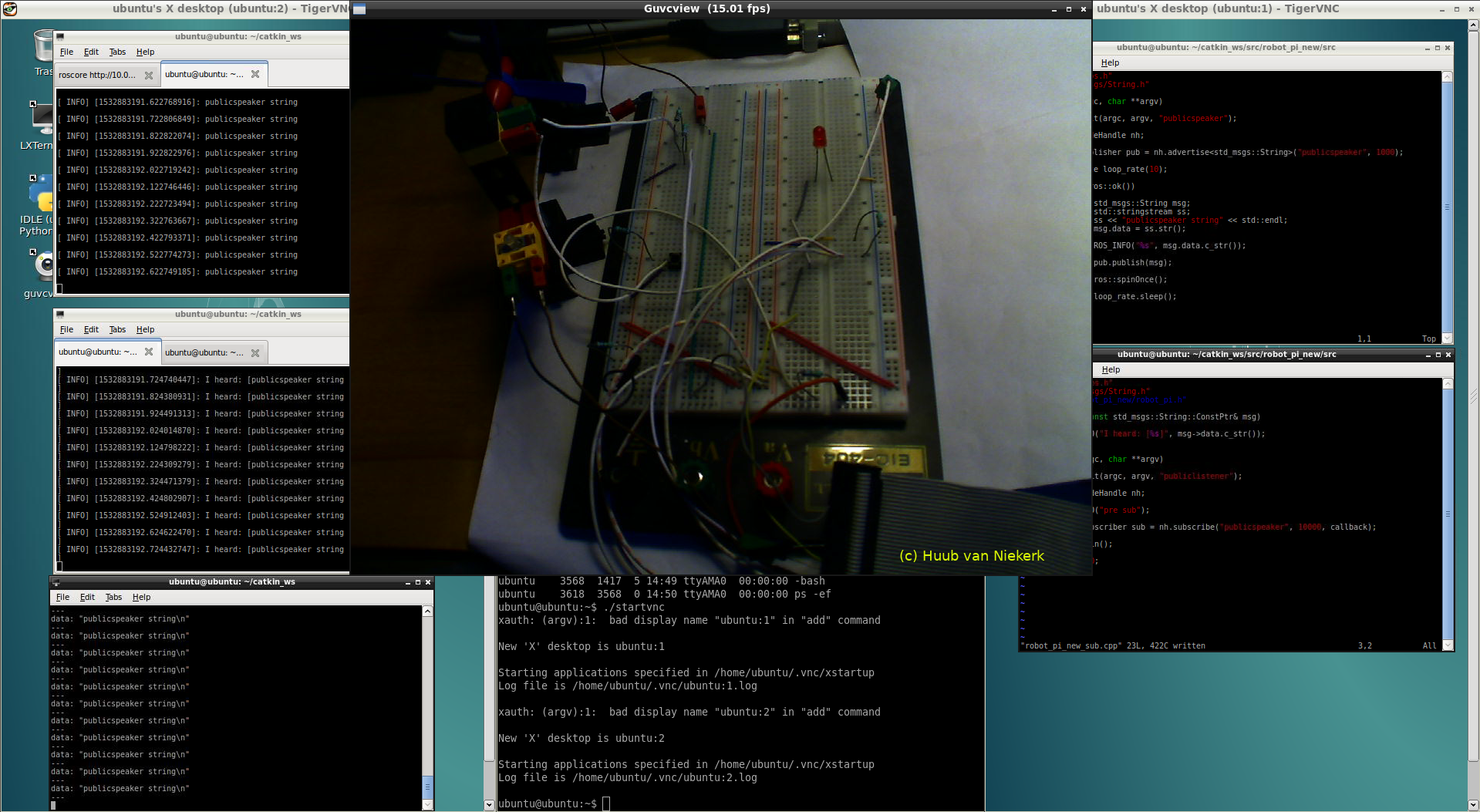
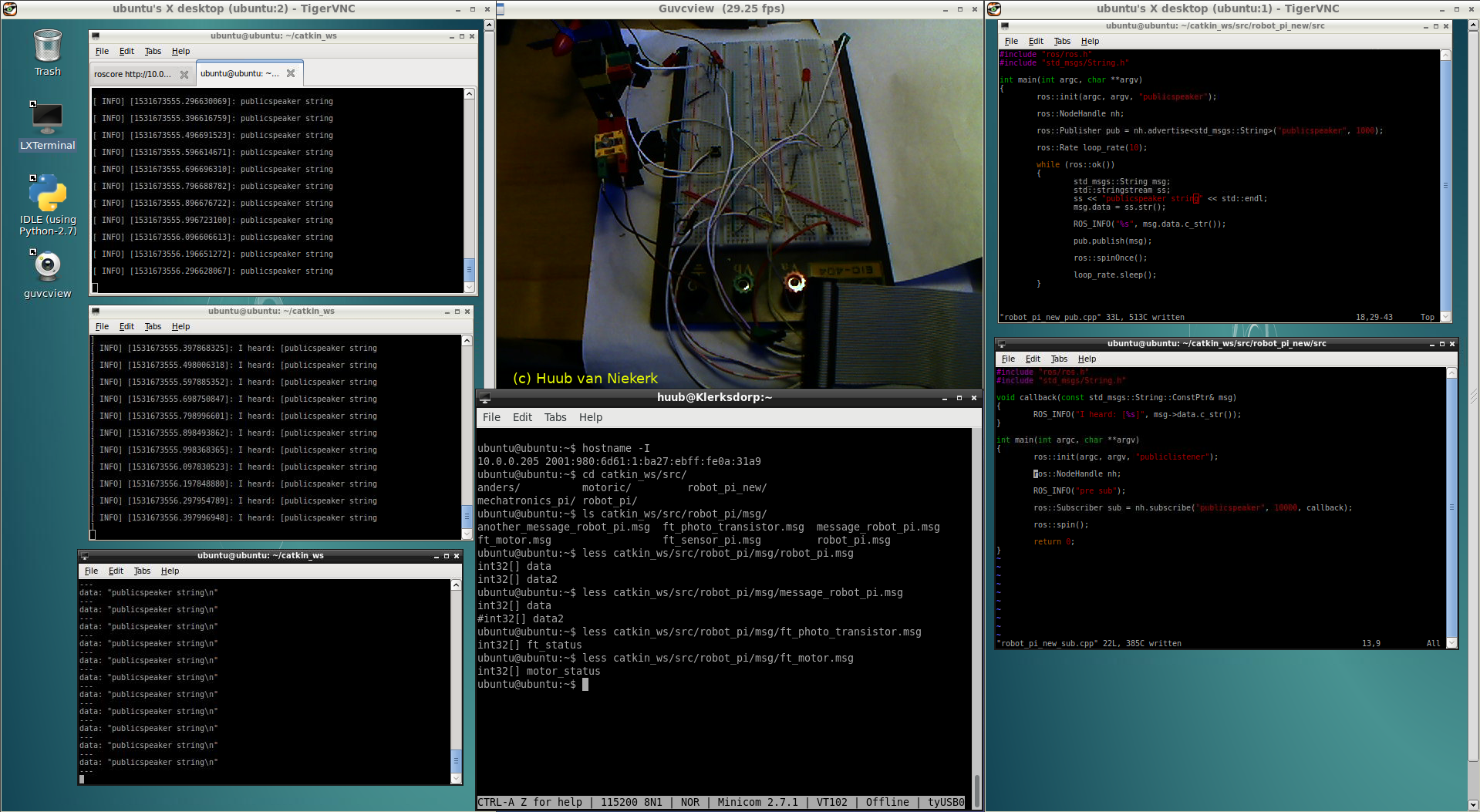
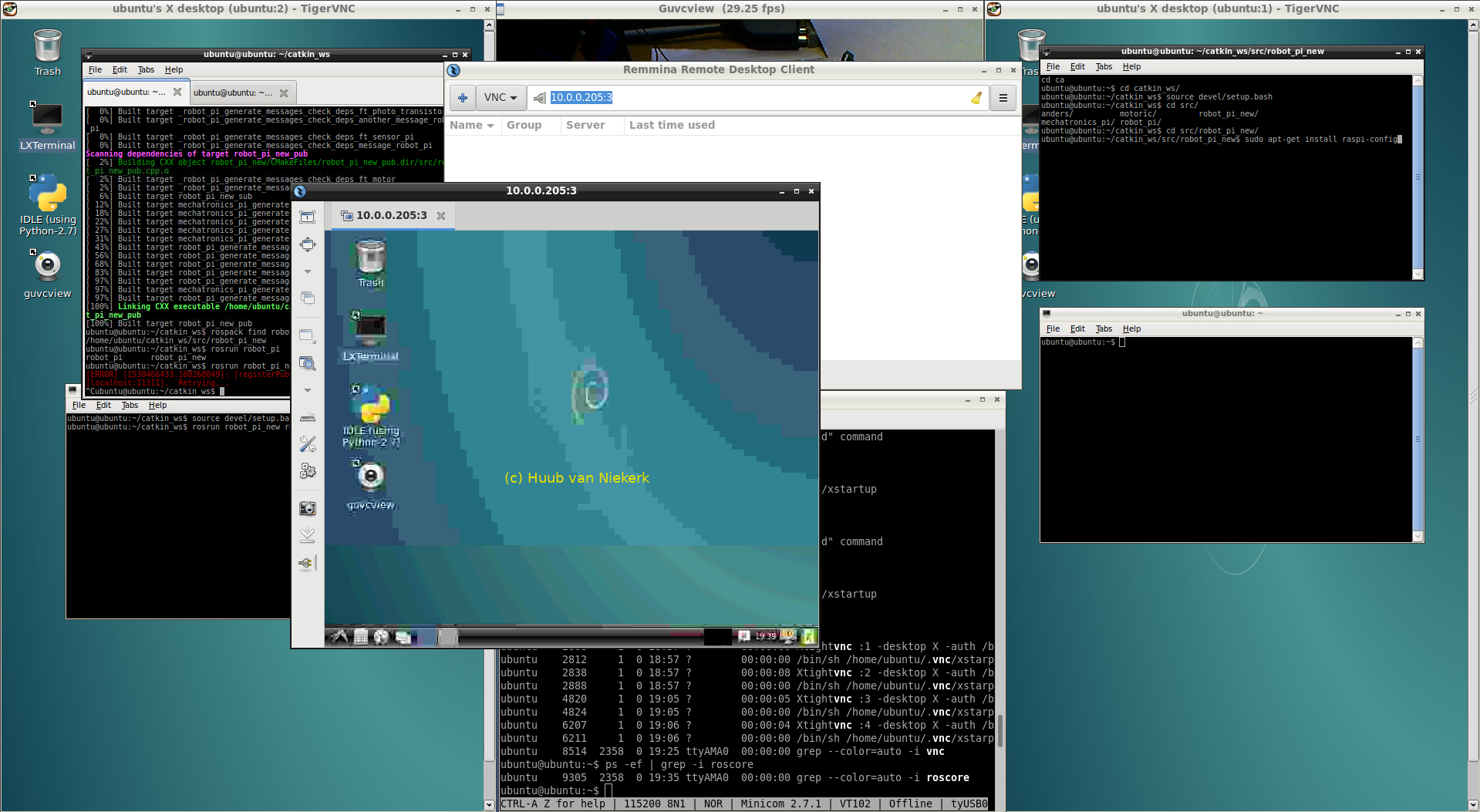
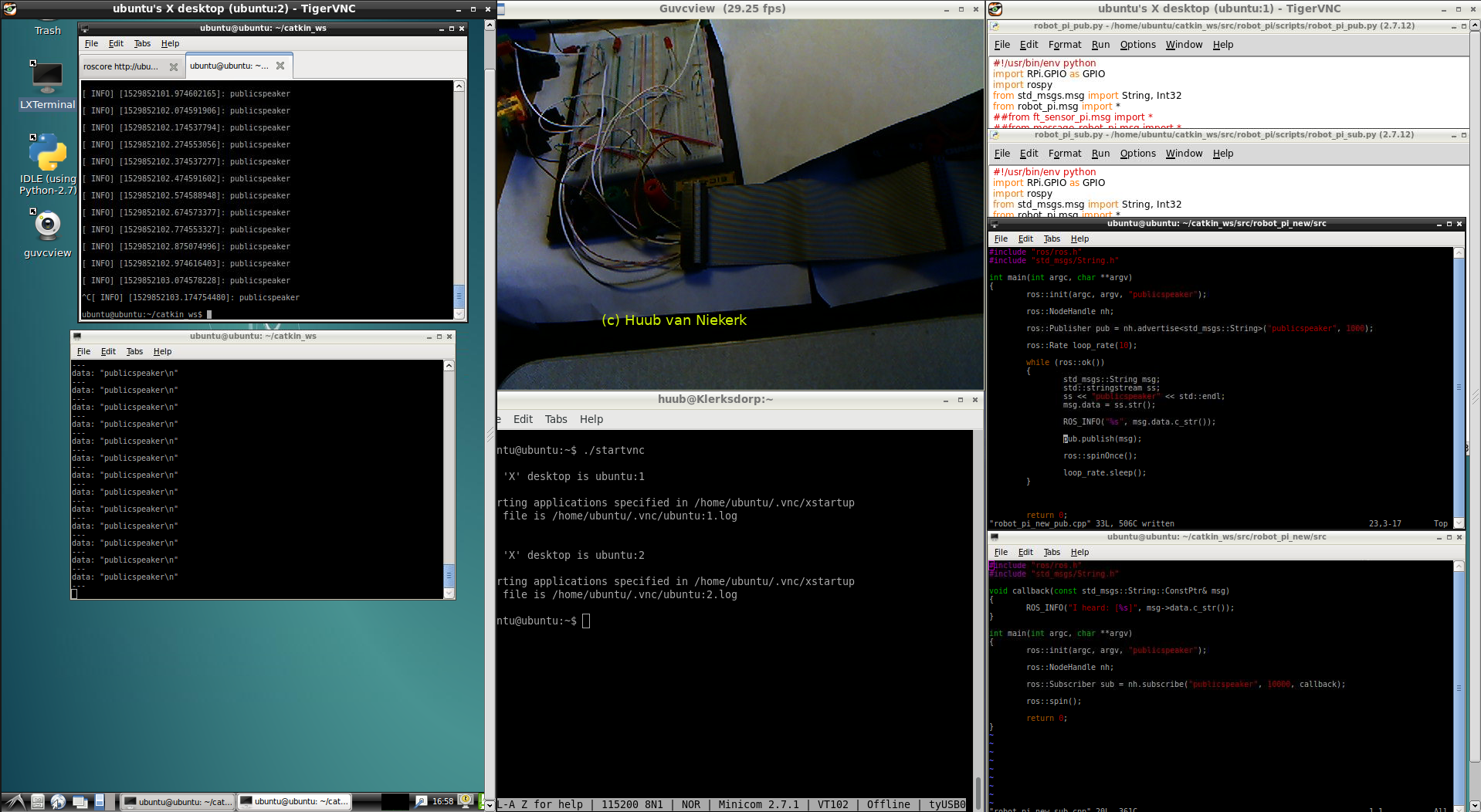
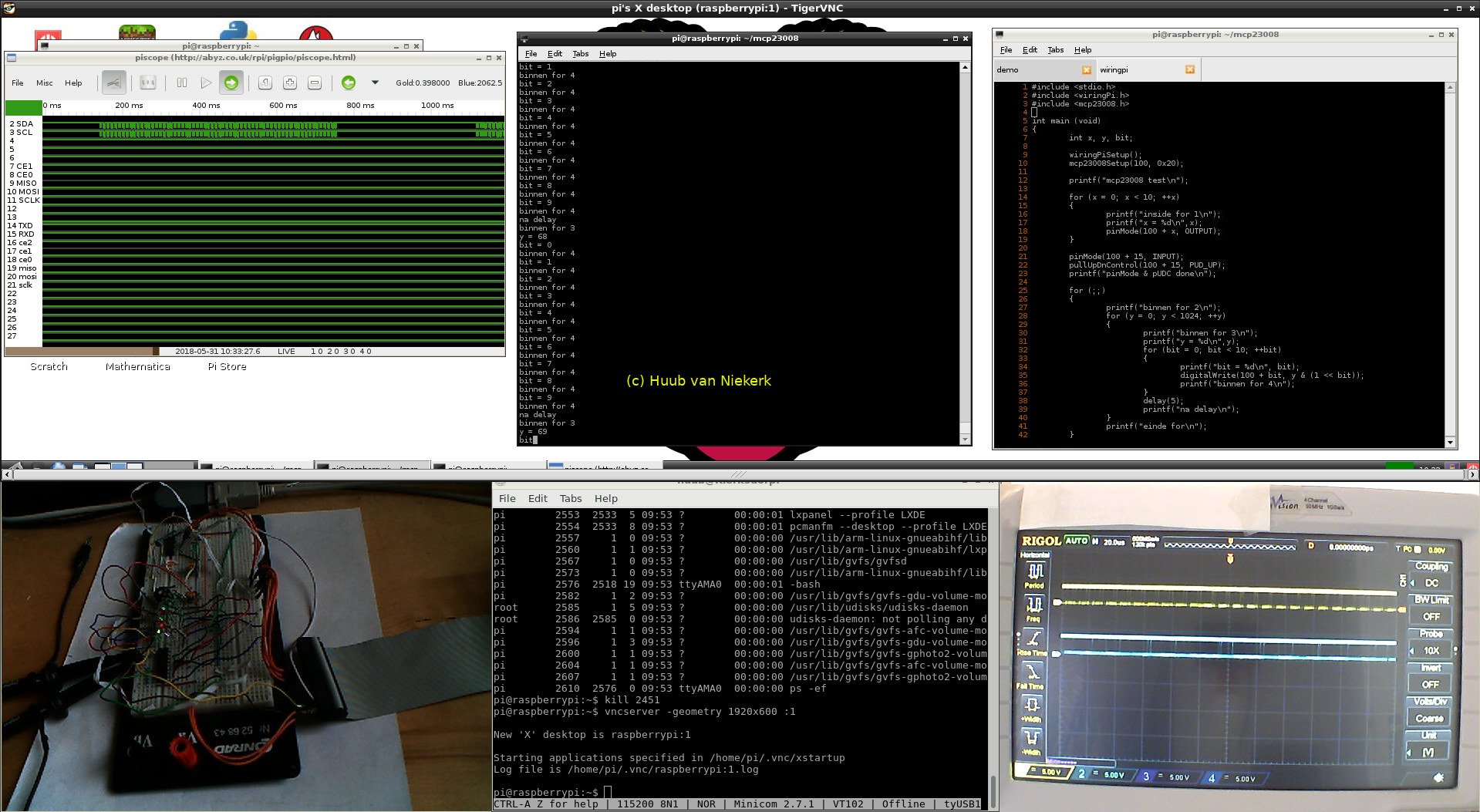
RaspberryPi2 & ROS: With a kind-of behind-the-scenes intro, I get on using Bash again on MaxOSX, then Android. Testing GPIOClass, missing & adding a file but will it help?! Click the image to watch the video.
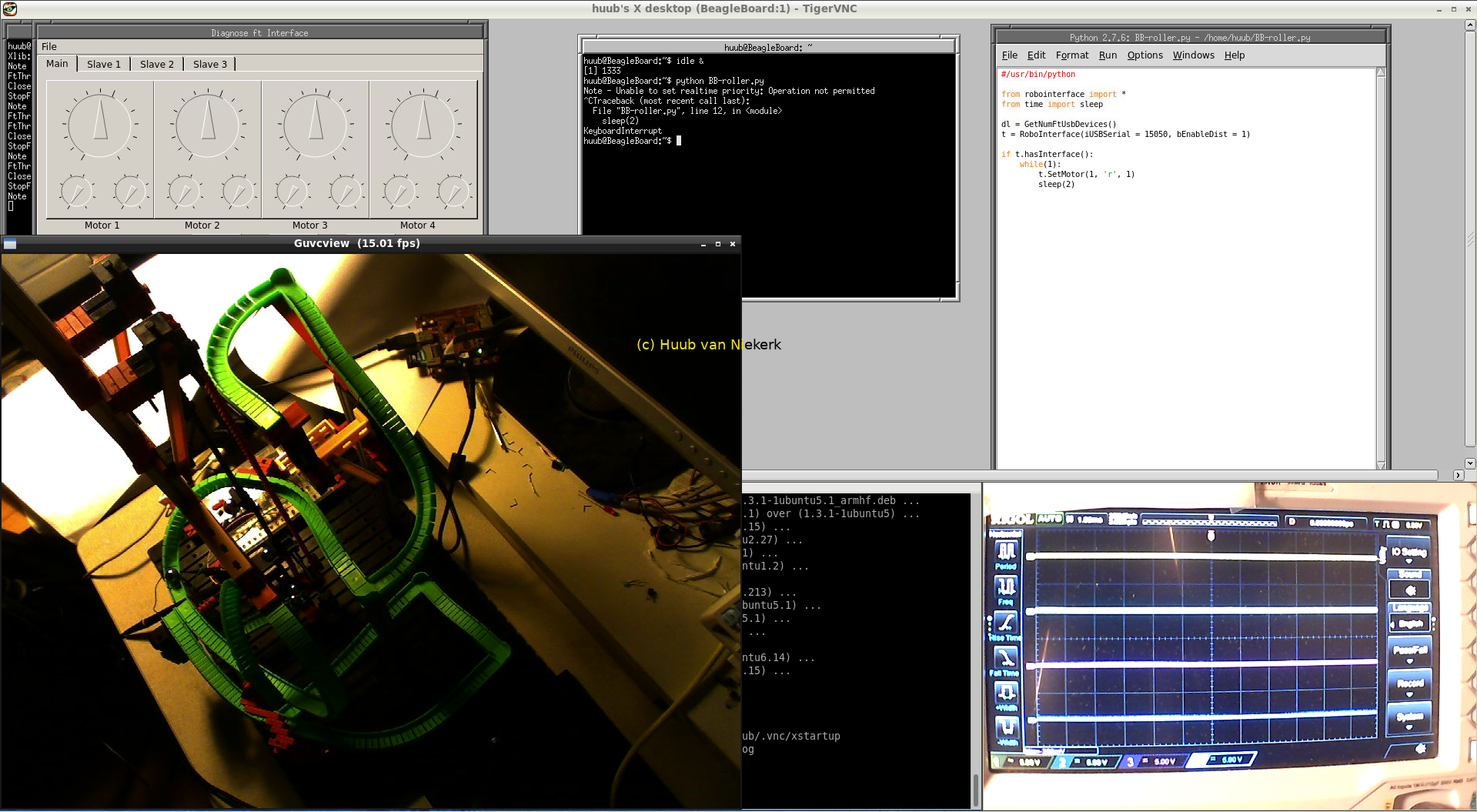
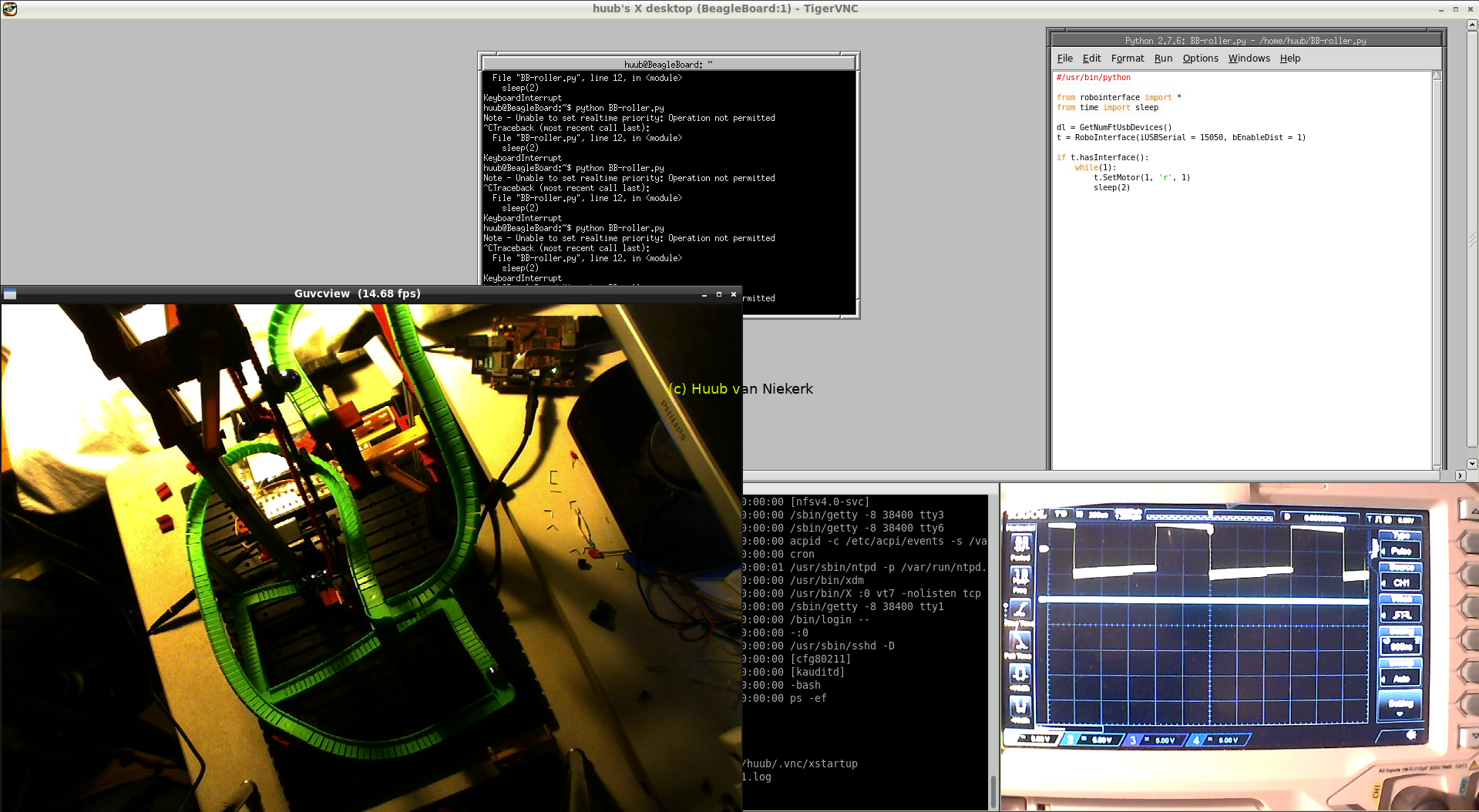
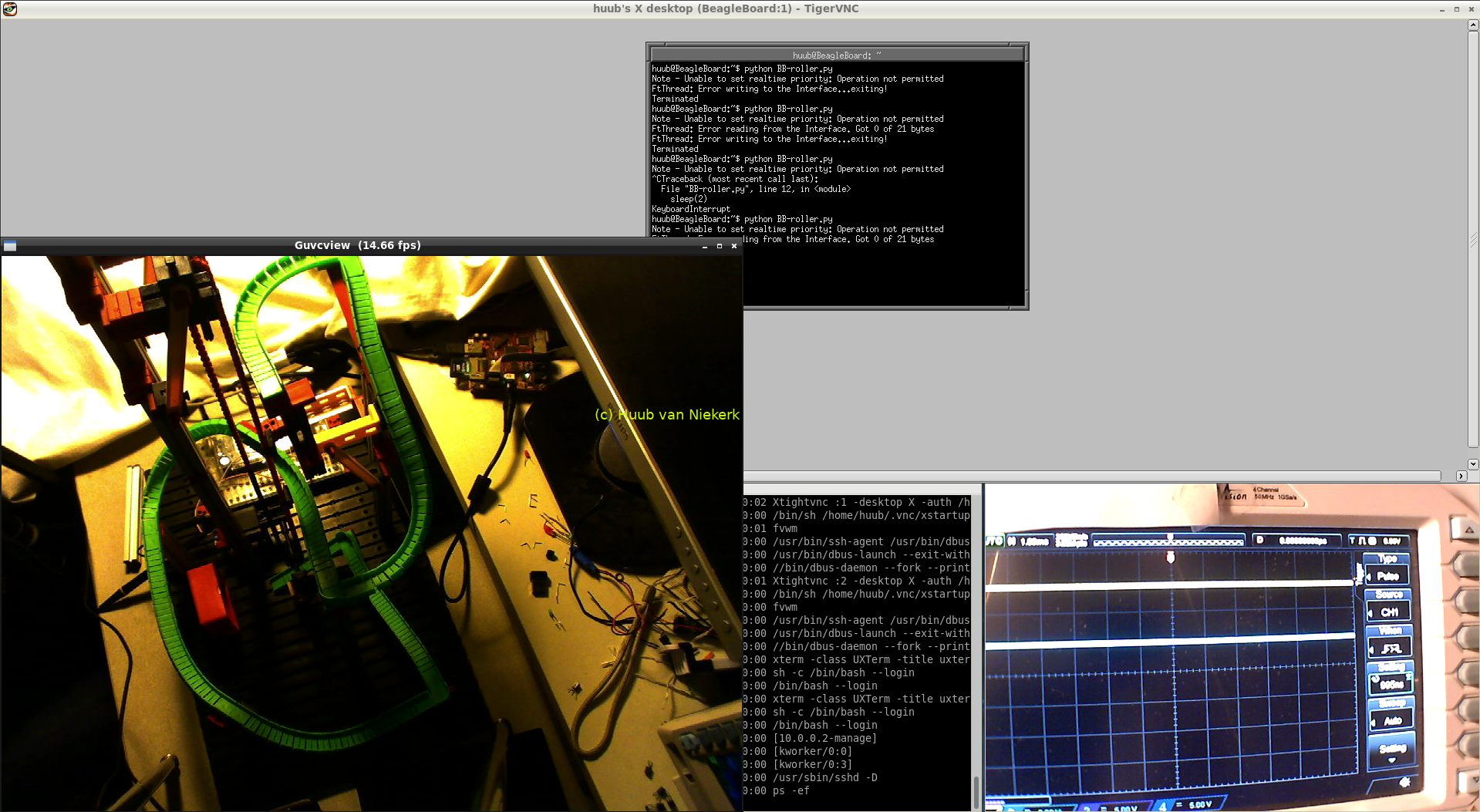
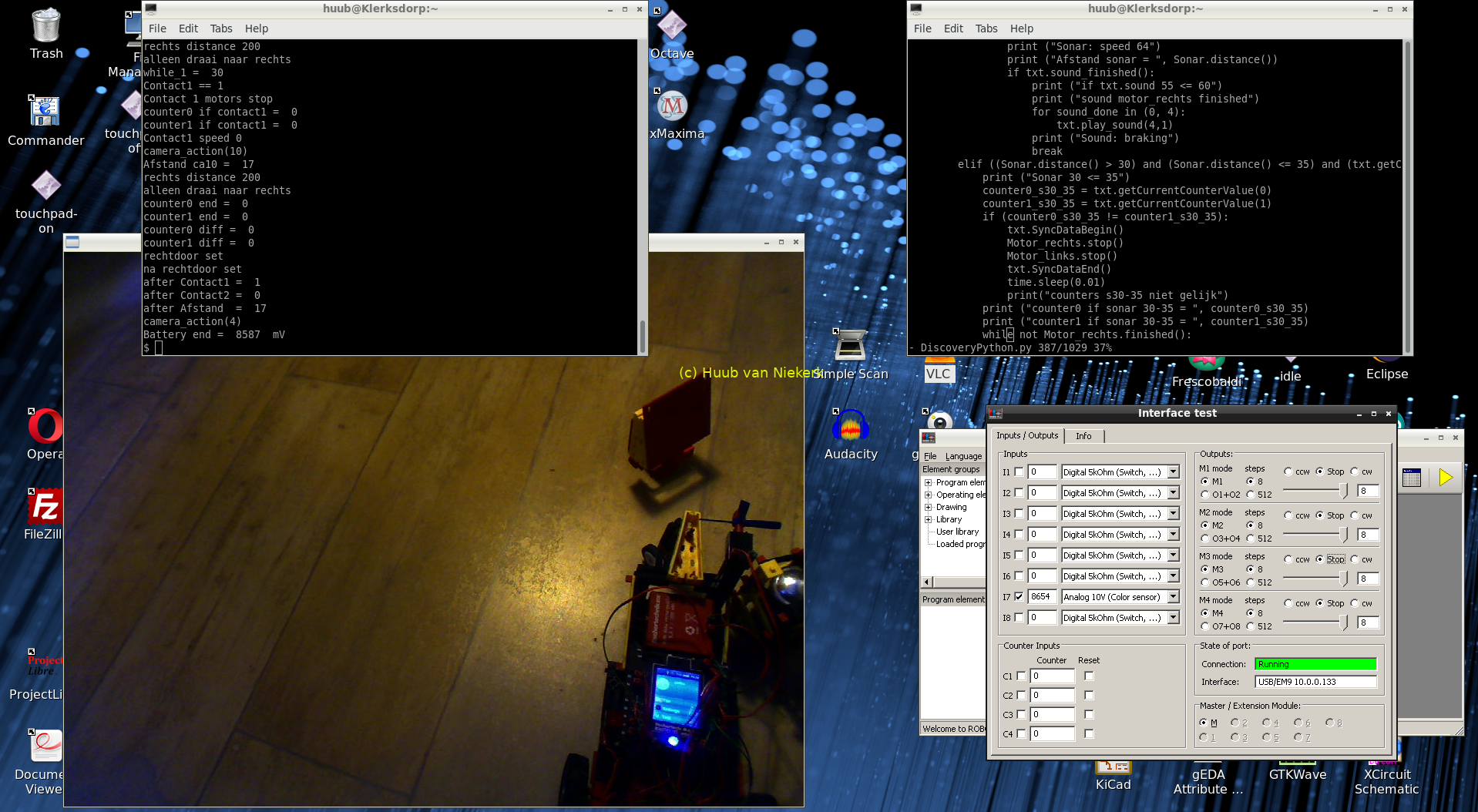
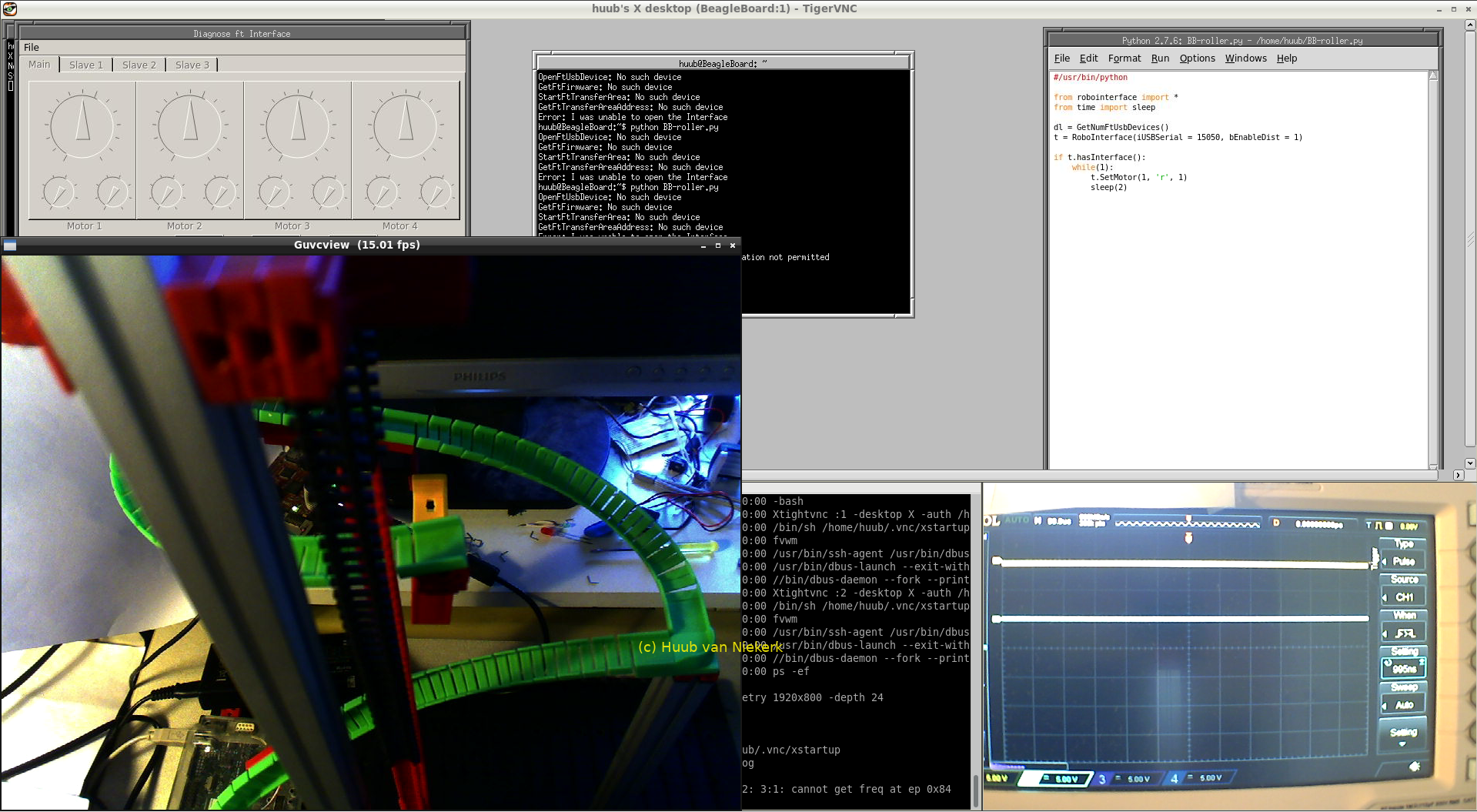
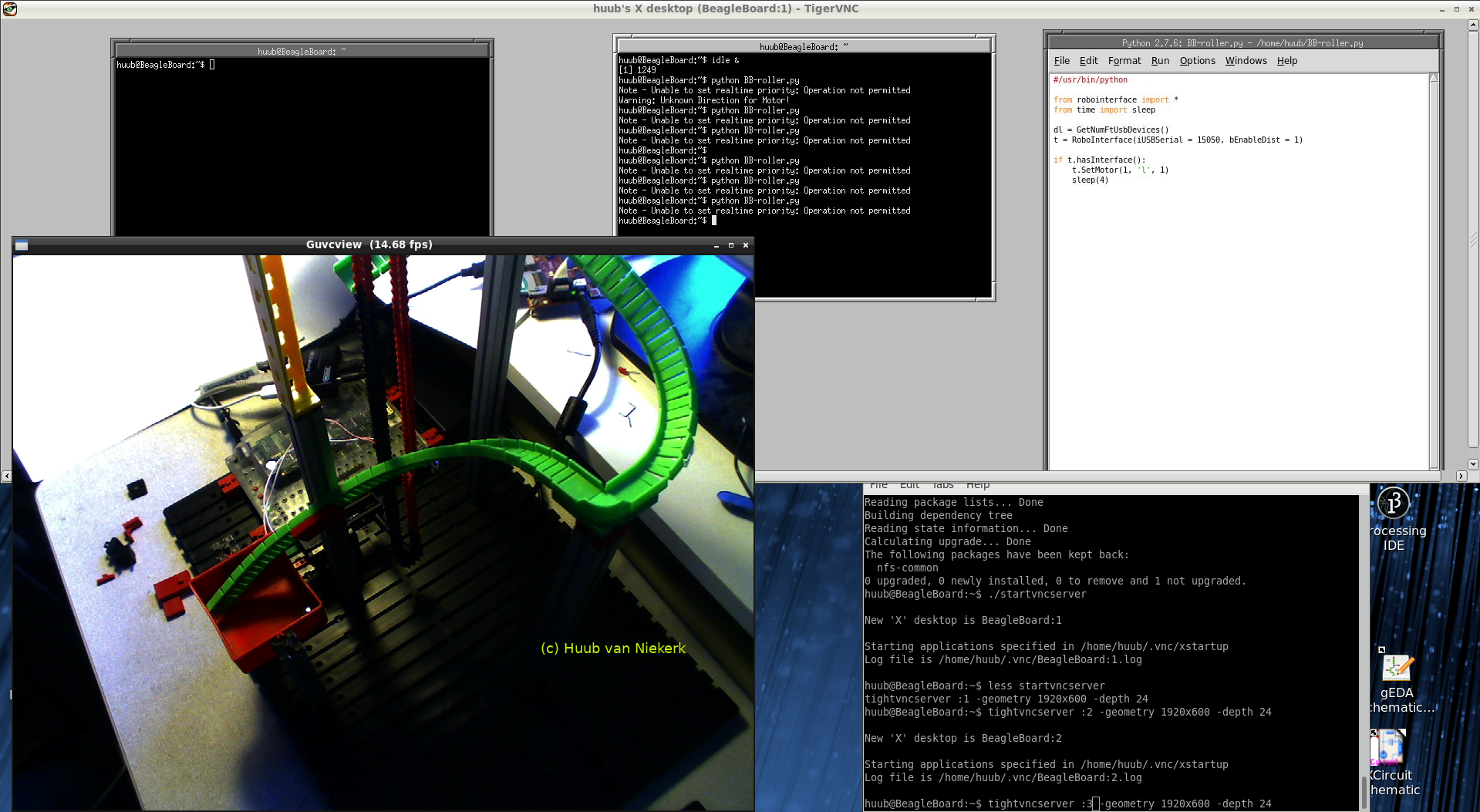
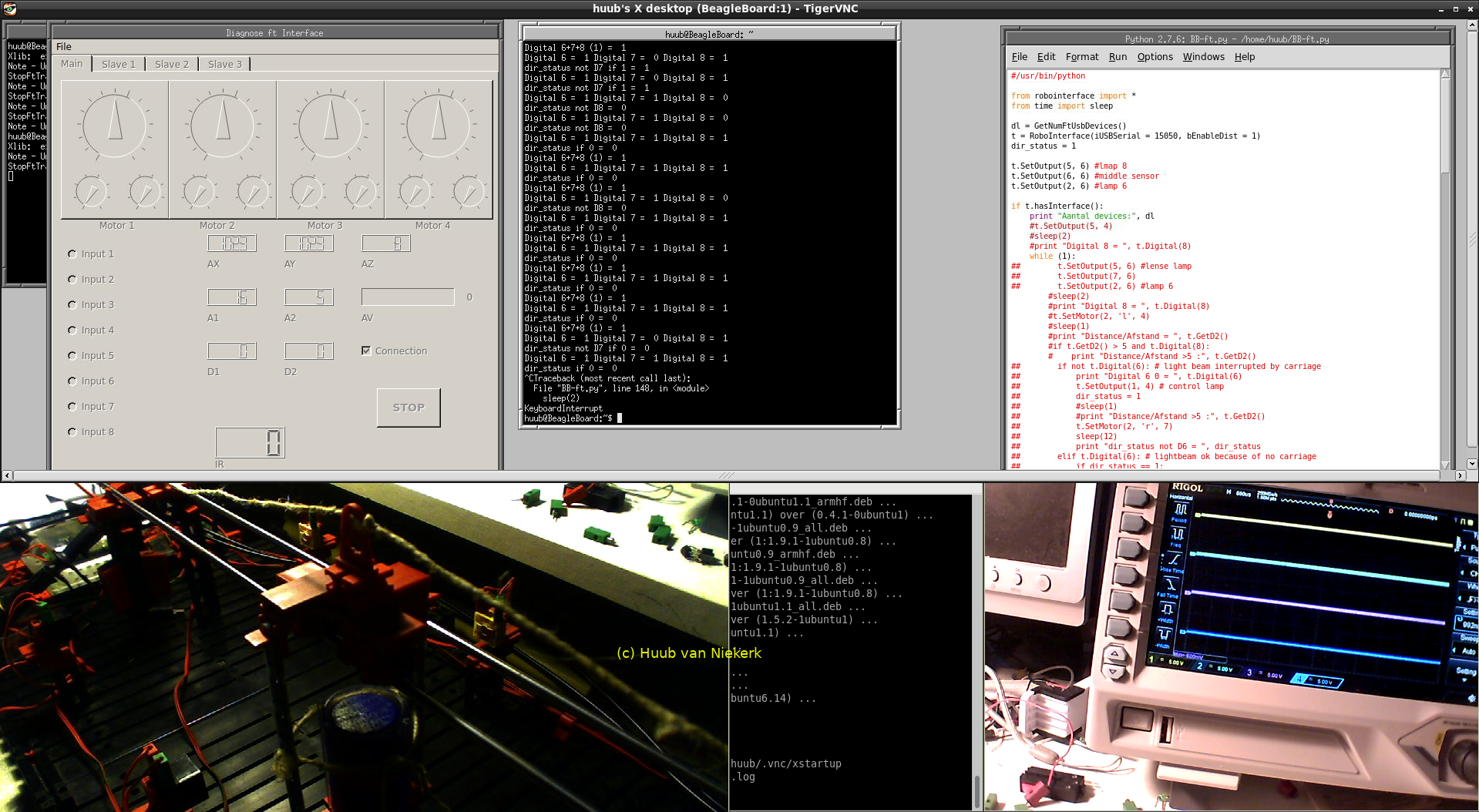
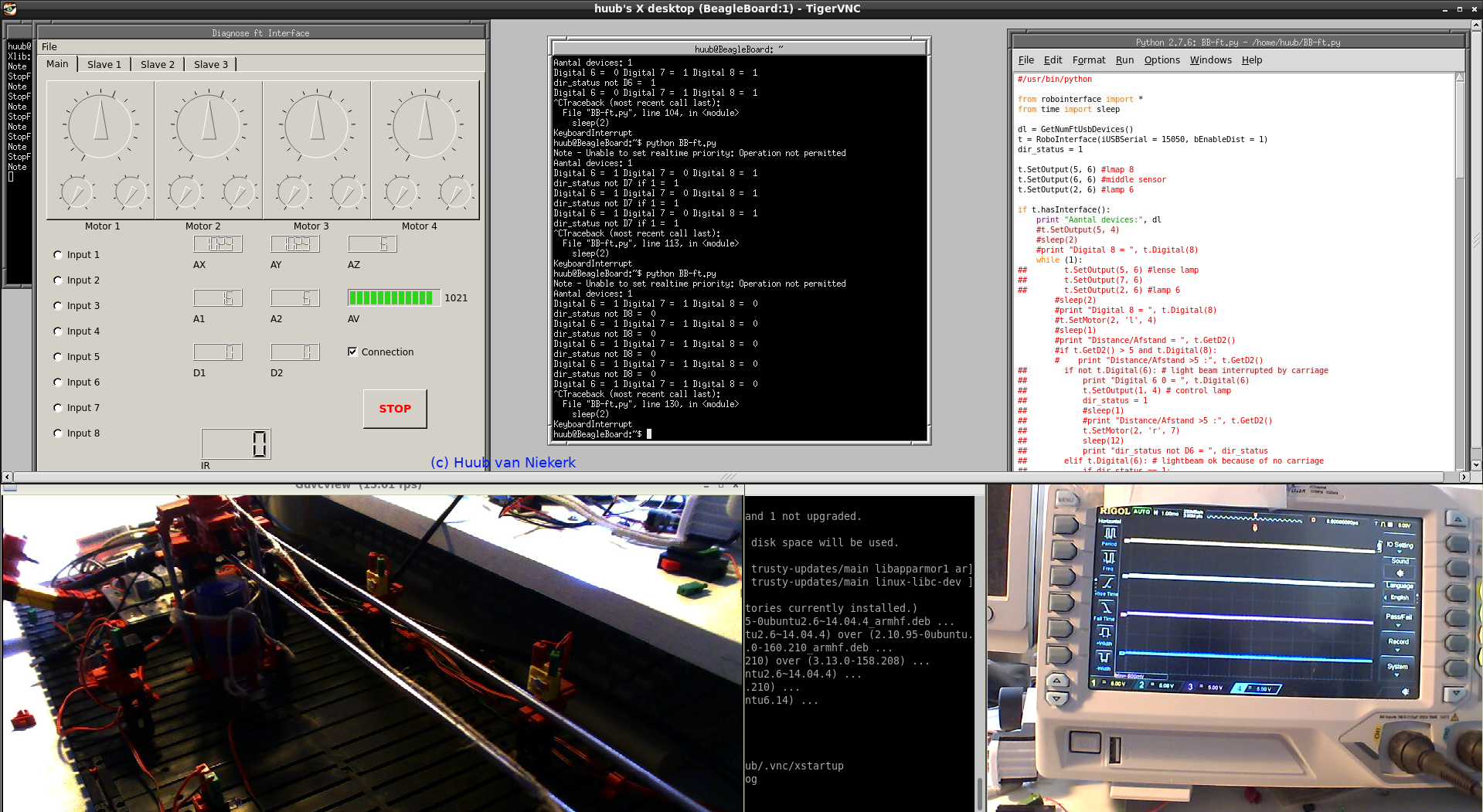
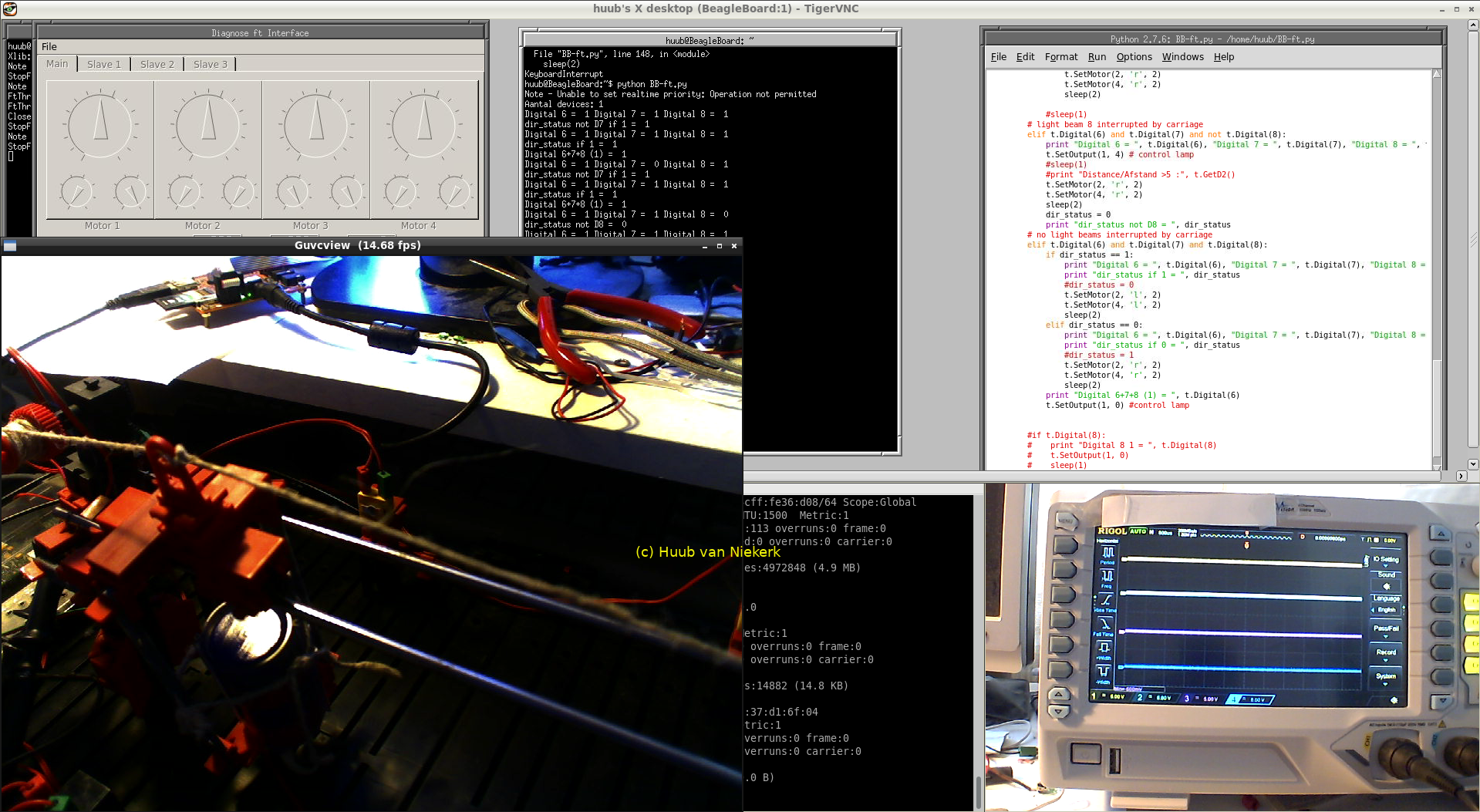
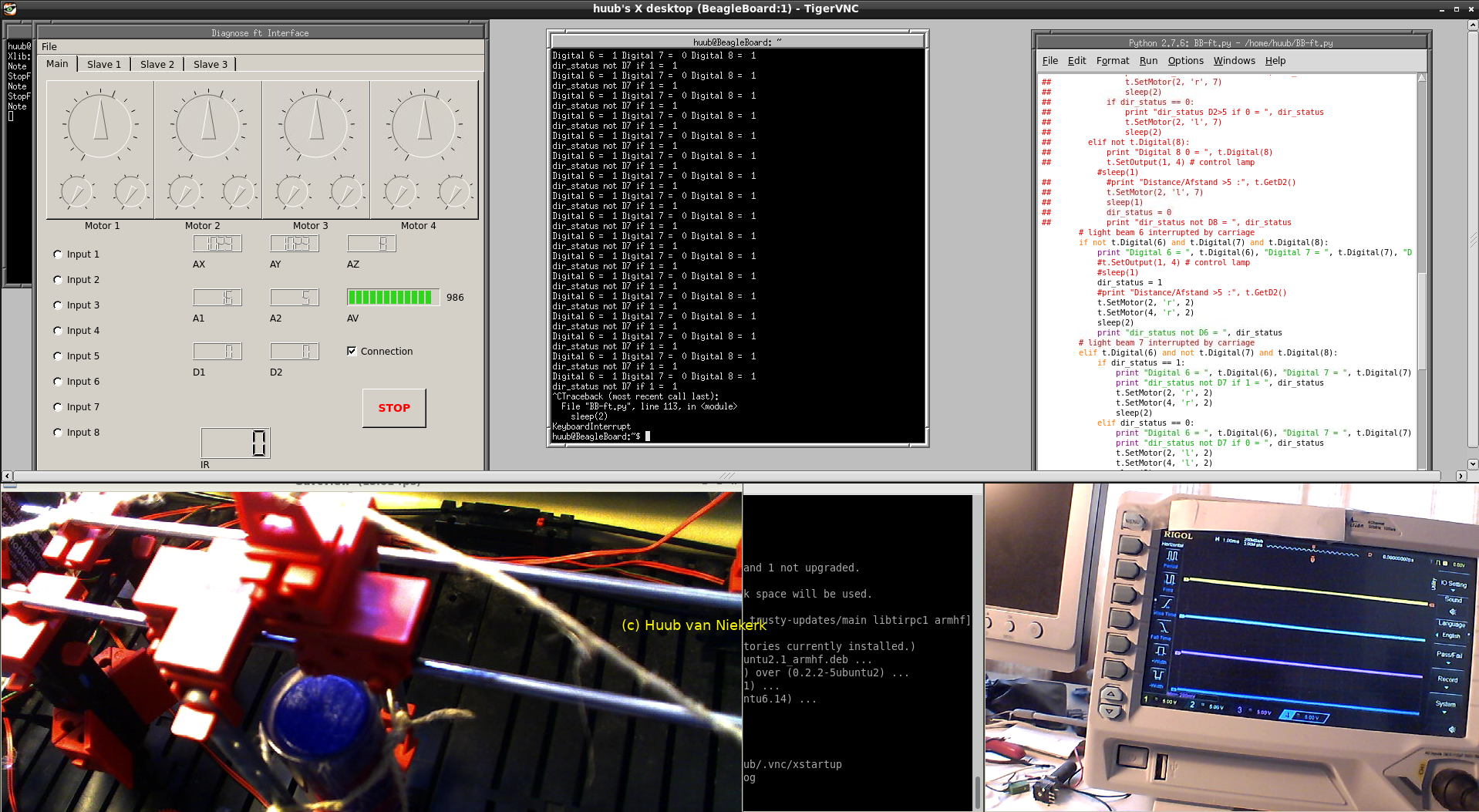
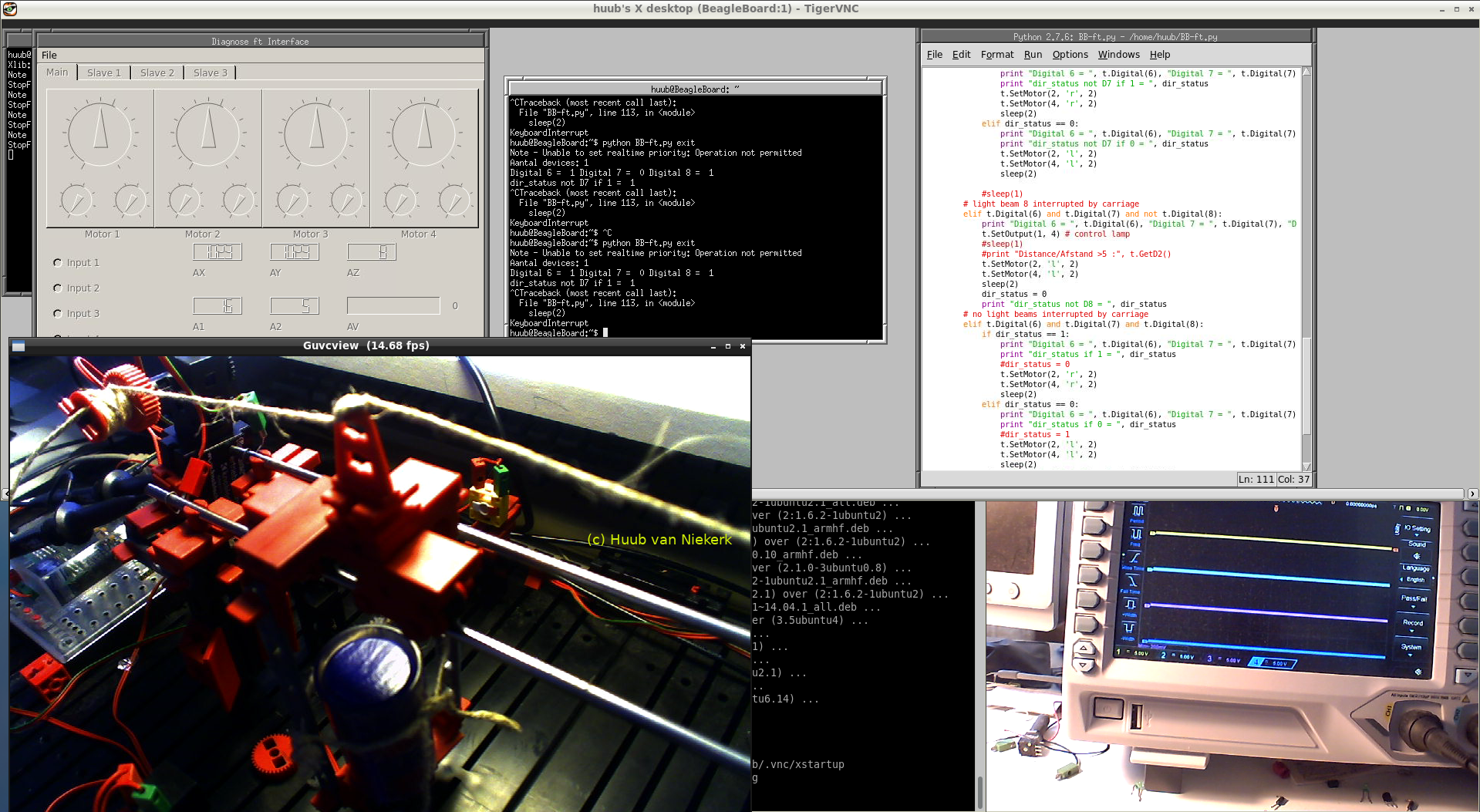
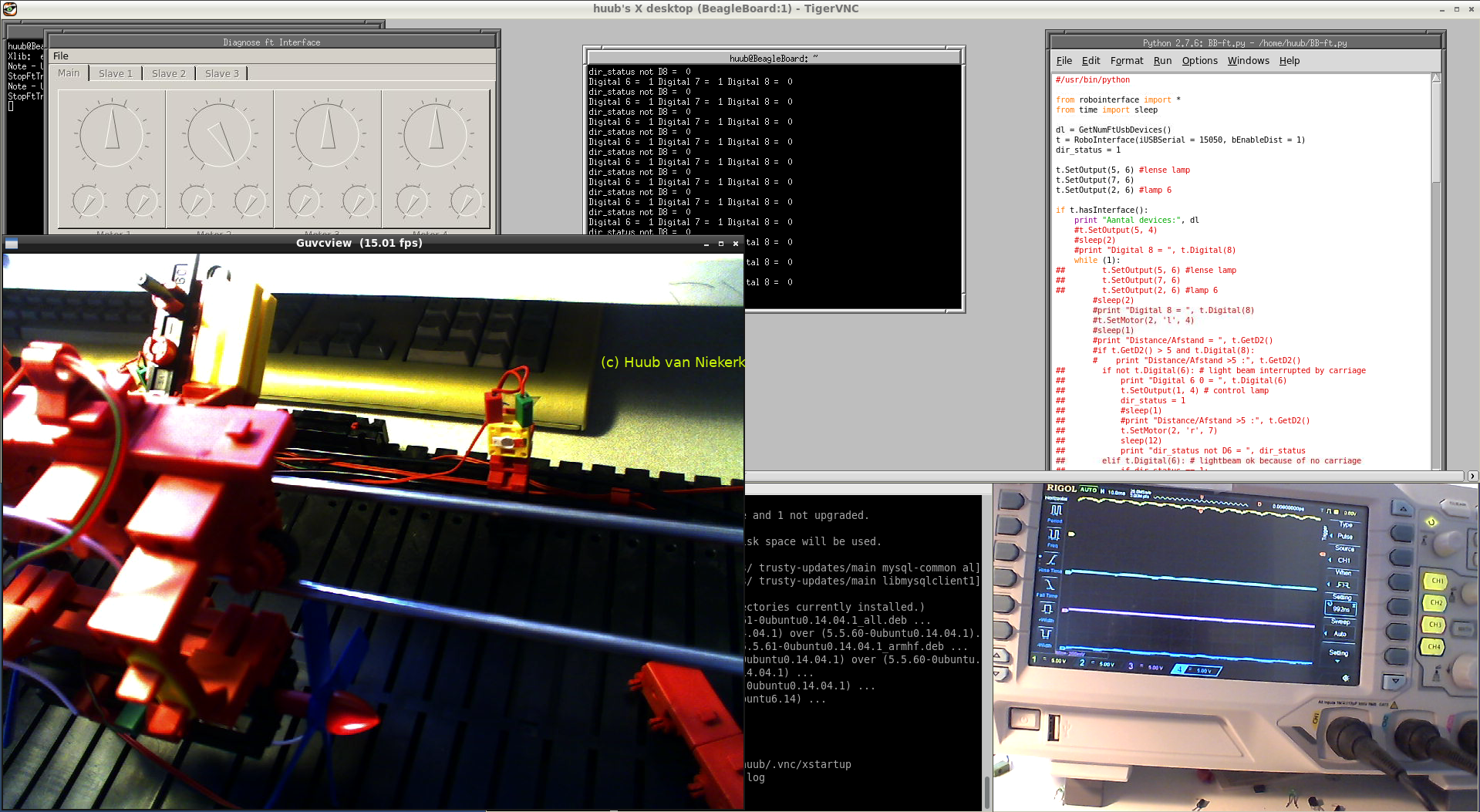
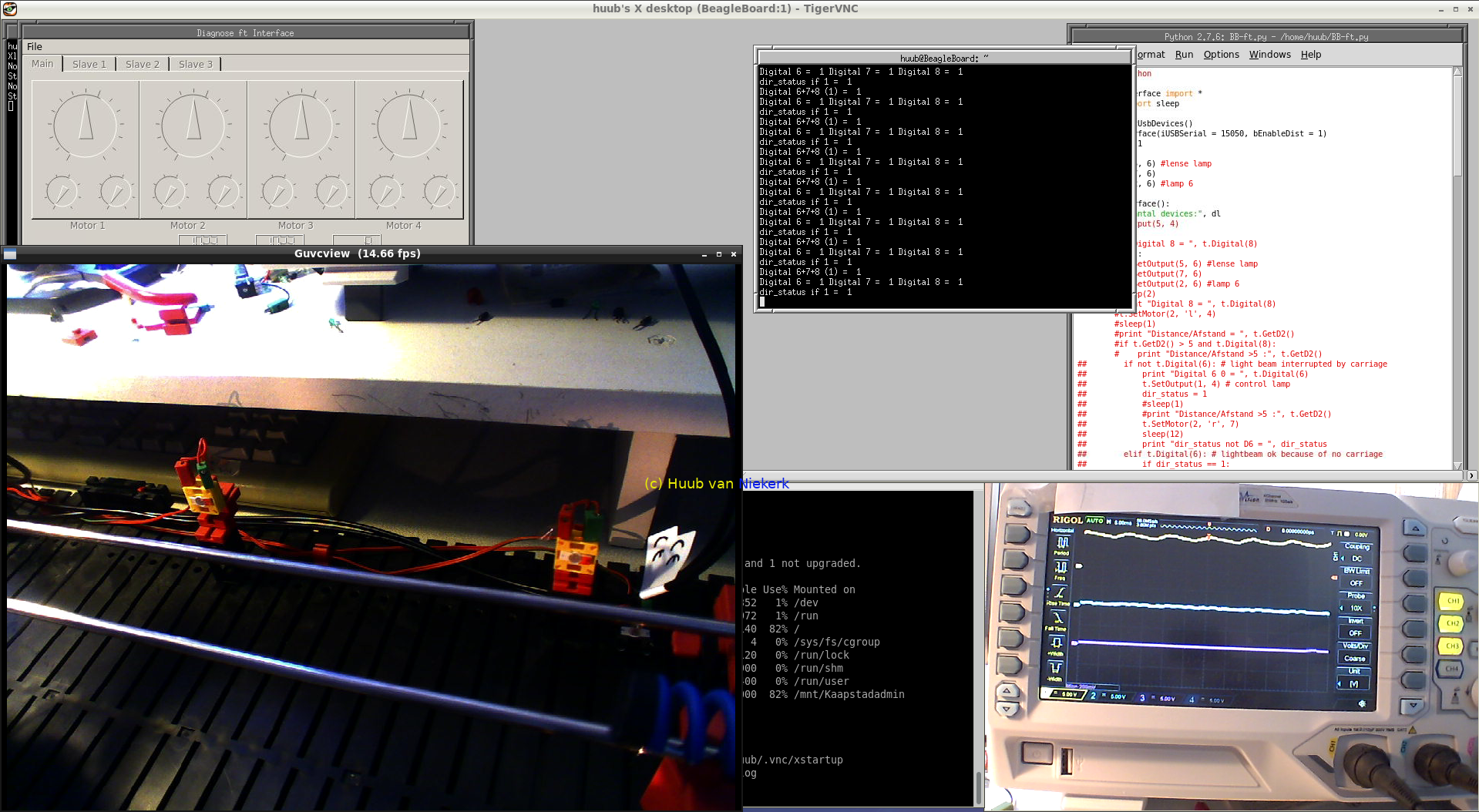
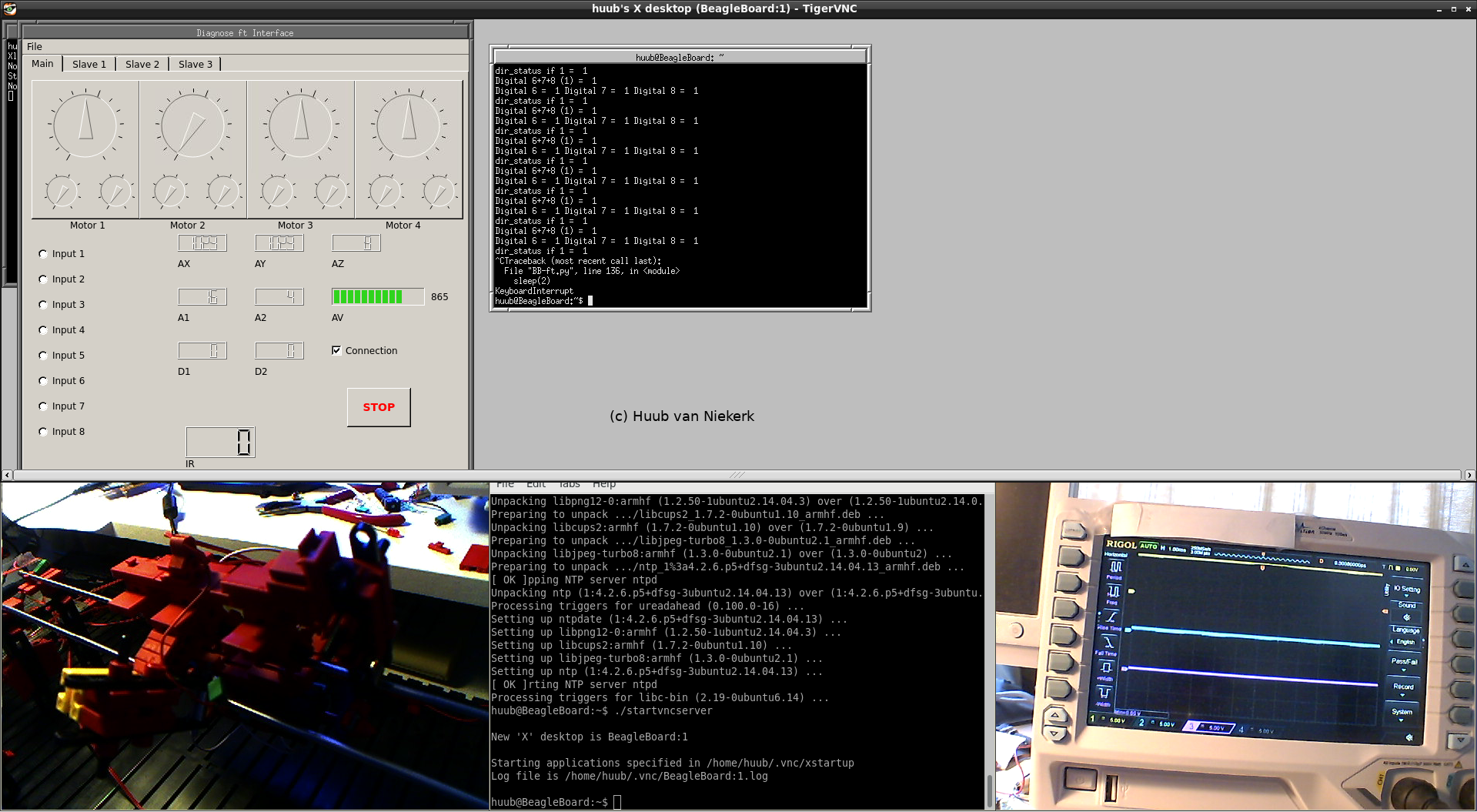
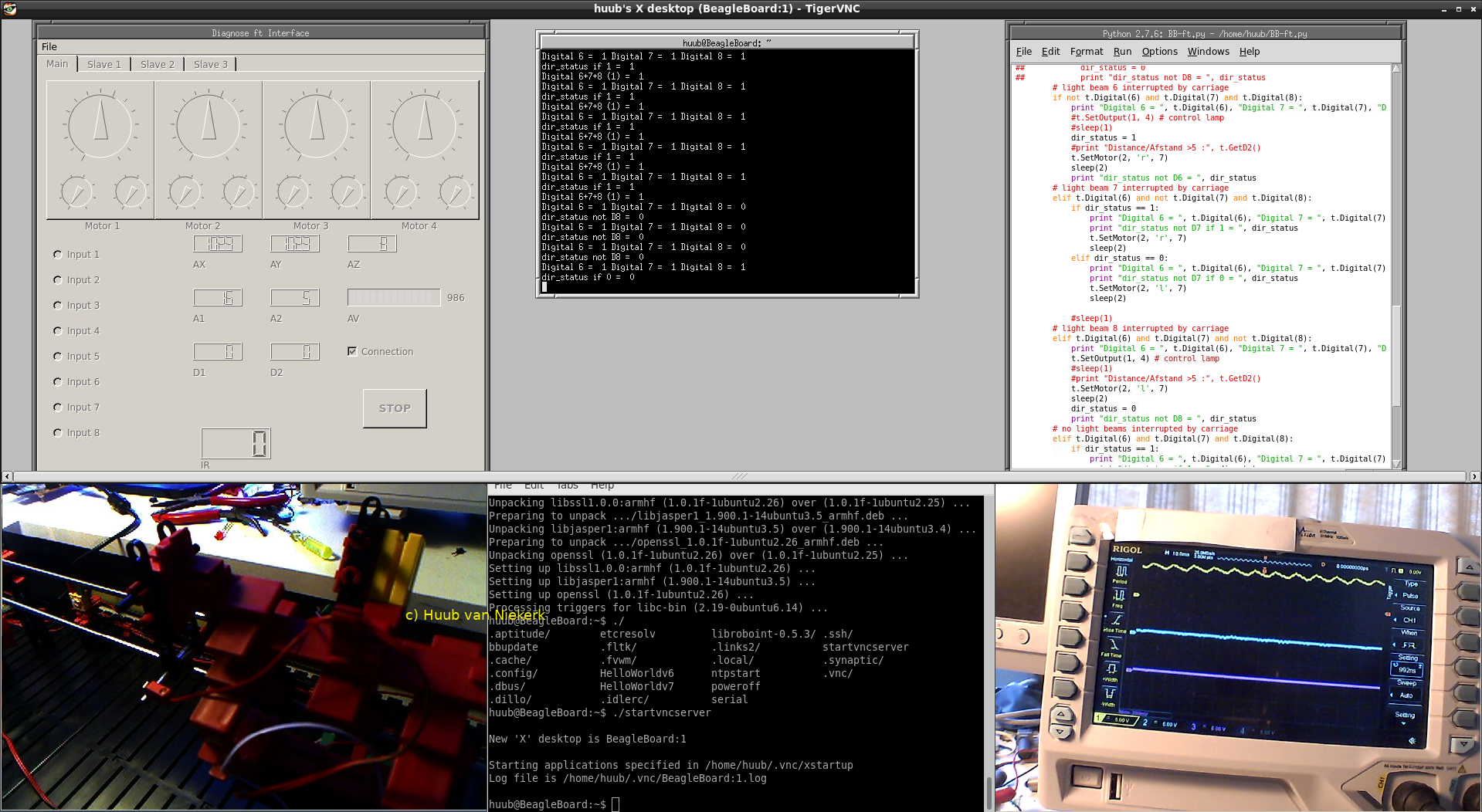
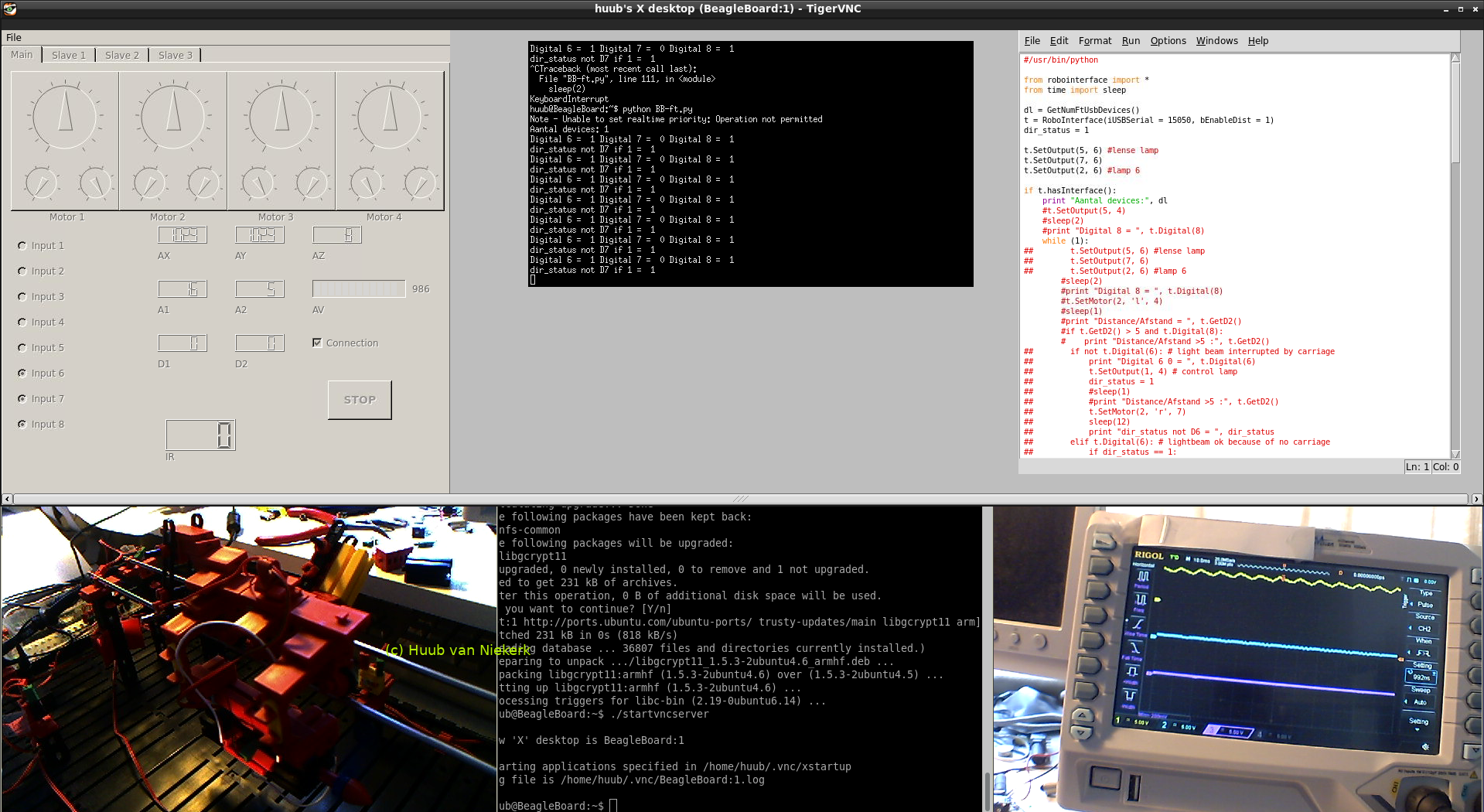
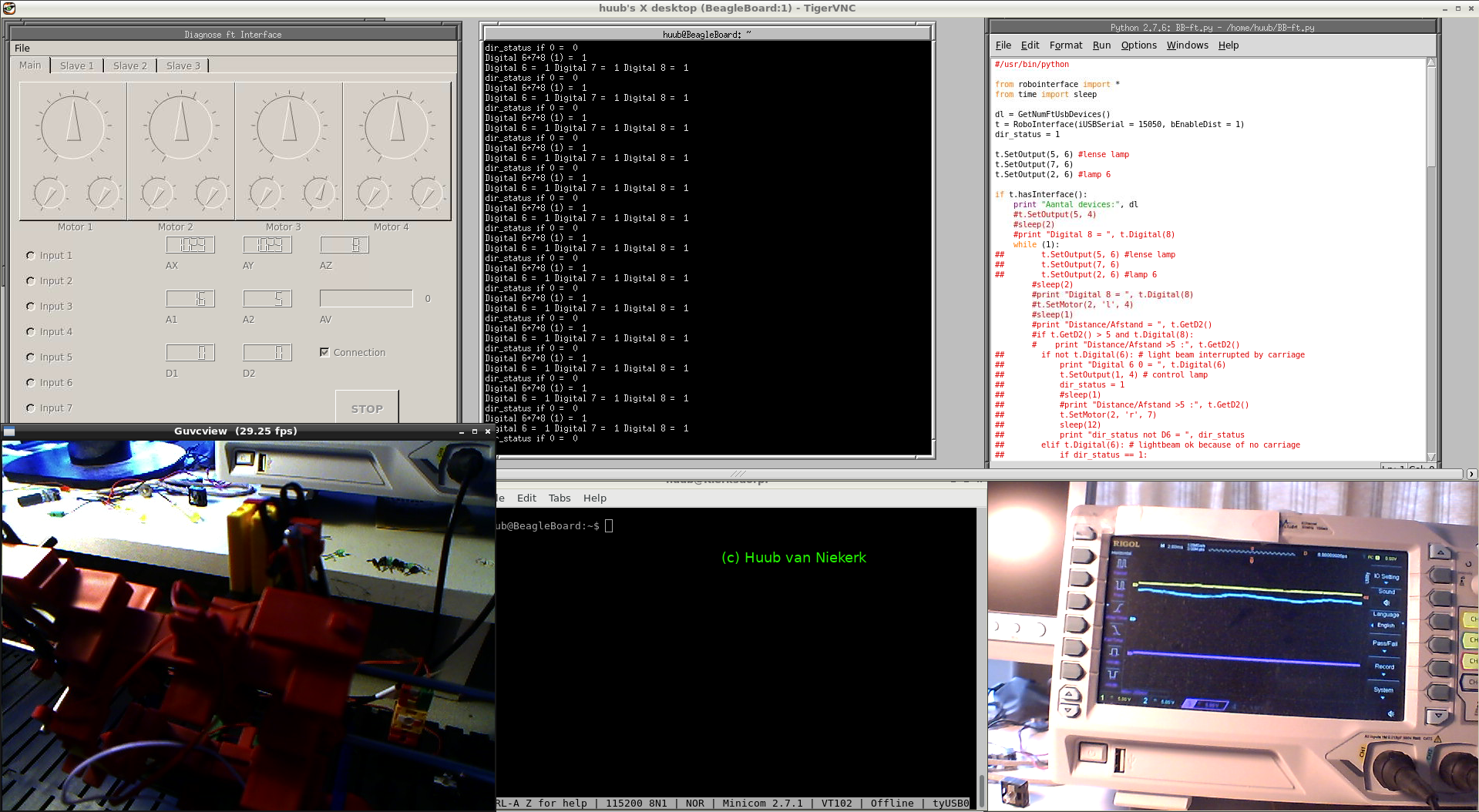
BeagleBoard & rollertrack: Adding a switch to control the wormgear manually, but how should it work? Diagnose gives the answer. Then a motor oops. but why? Finally some more reconstruction in trajectory and height, but also an oops. Click the image to watch the video.
21 December (Playlist) Blog 302
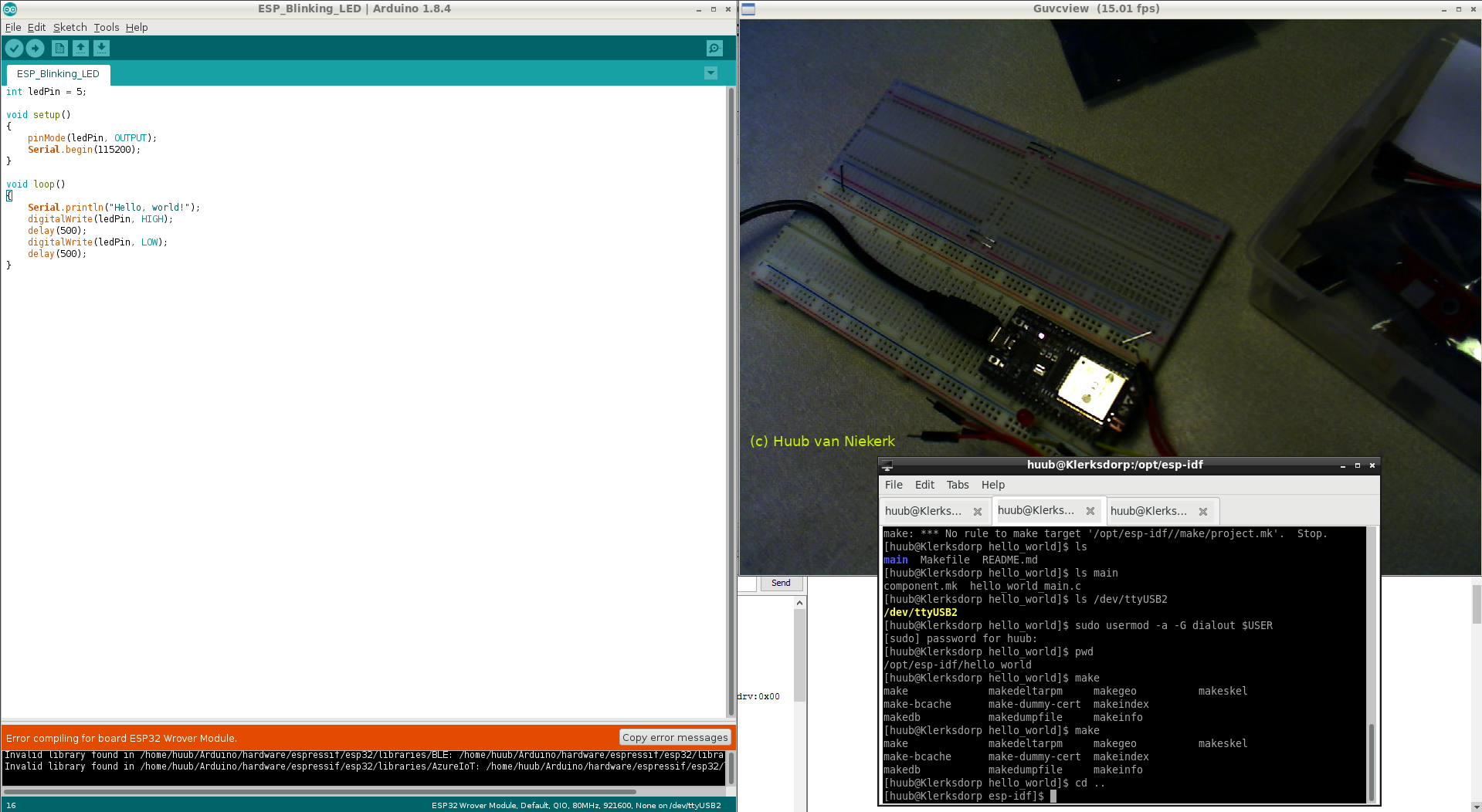
ESP32: Bit of chaotic, with a new attempt on getting the buzzer working correcly, the LCD behaving oddly, the motor starting to work, keypad oddities and wiring oopses. Click the image to watch the (chaotic) video.
RaspberryPi: Again, focus is on SPI and writebytes() for the MAX522. But what's going wrong? Using Android and MacOSX to test the raspicam stream again. Bash won't work int this situation, and further testing brings other issues to light. Including an unpleasant surprise. Click the image to watch the video.
Mirft2: Starting with a connection problem, I can go on with the pixels forming an object. I follow a suggestion and test the OpenCV blob, and find a surprising result. How to go on? No time left for Blender.. Click the image to watch the video.
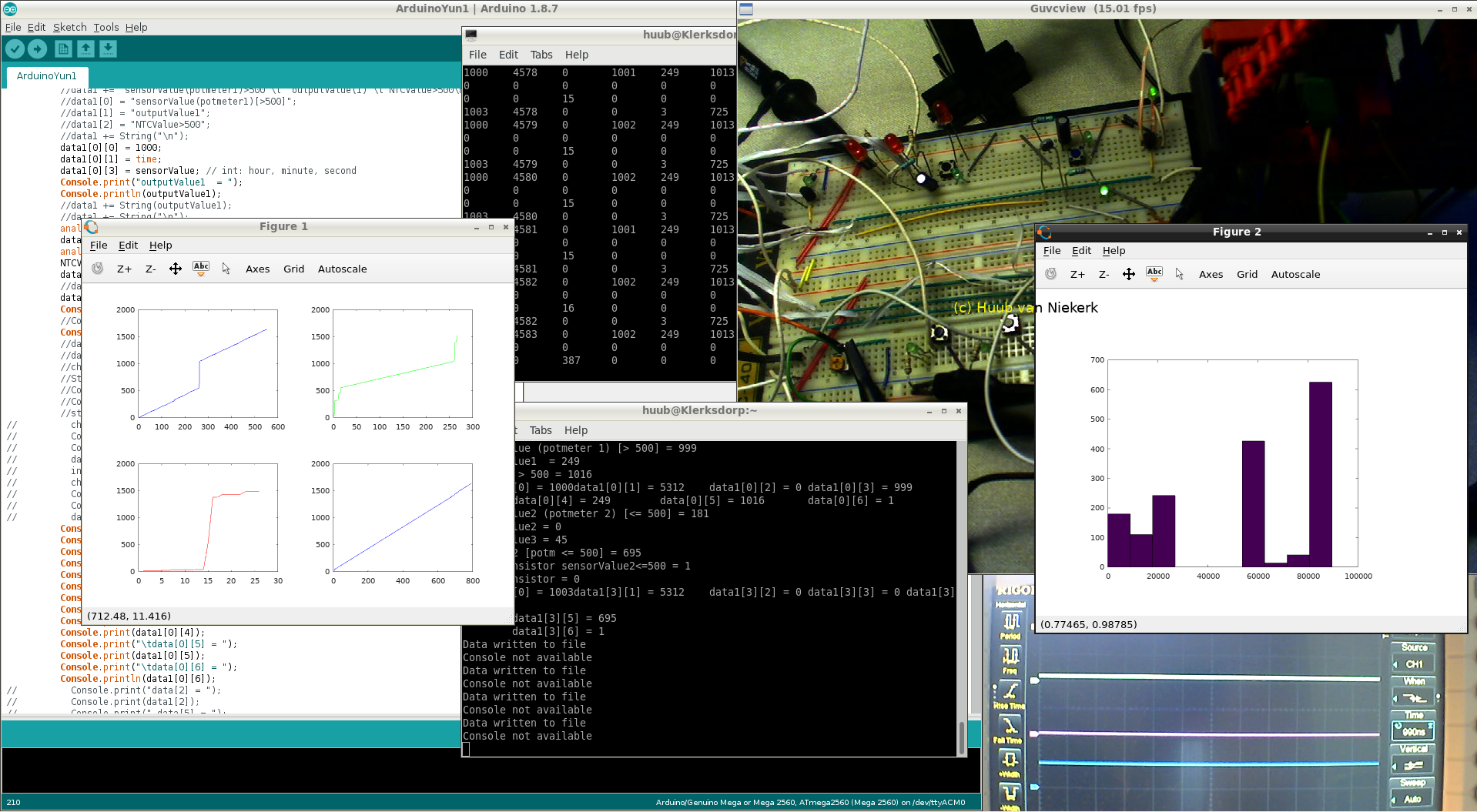
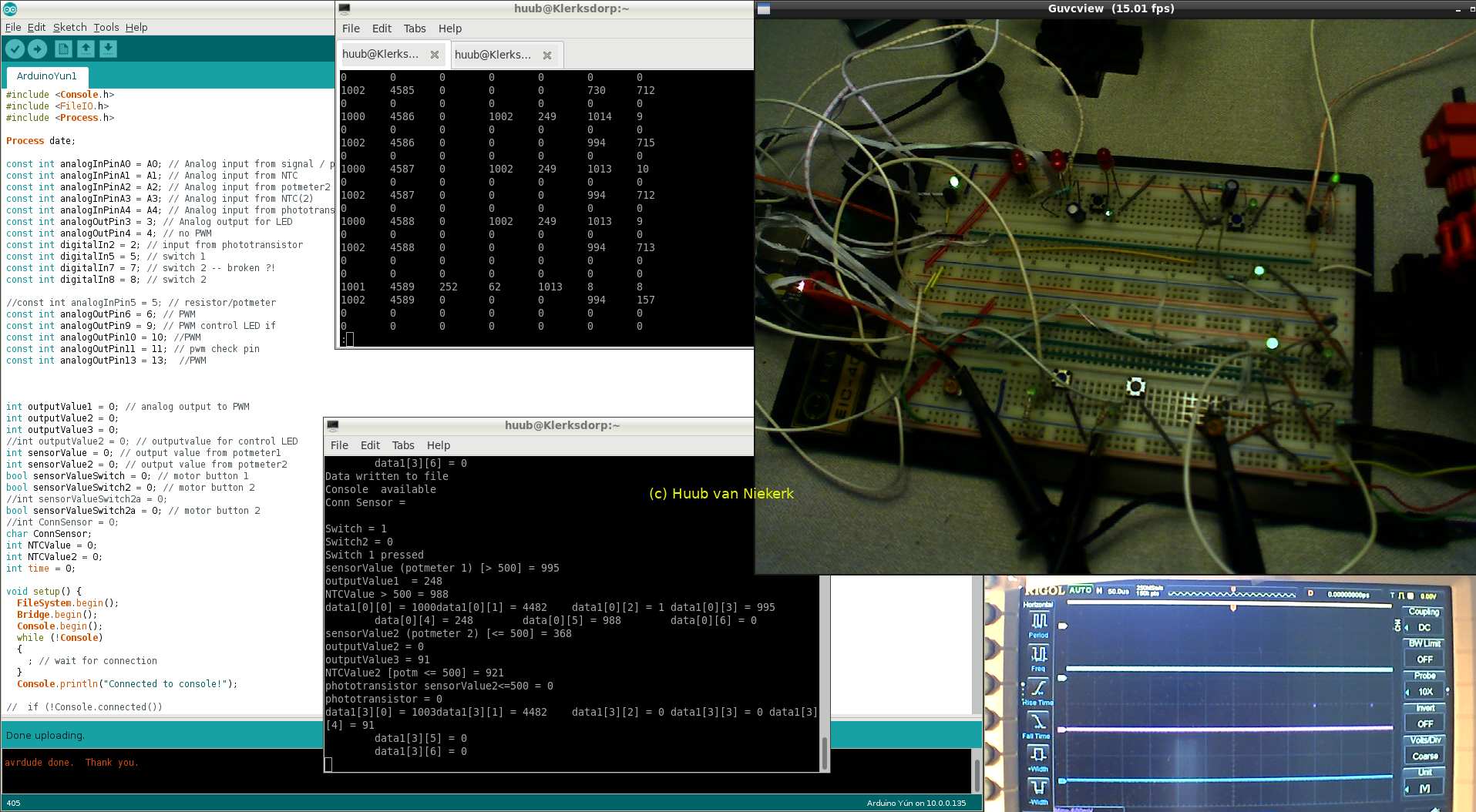
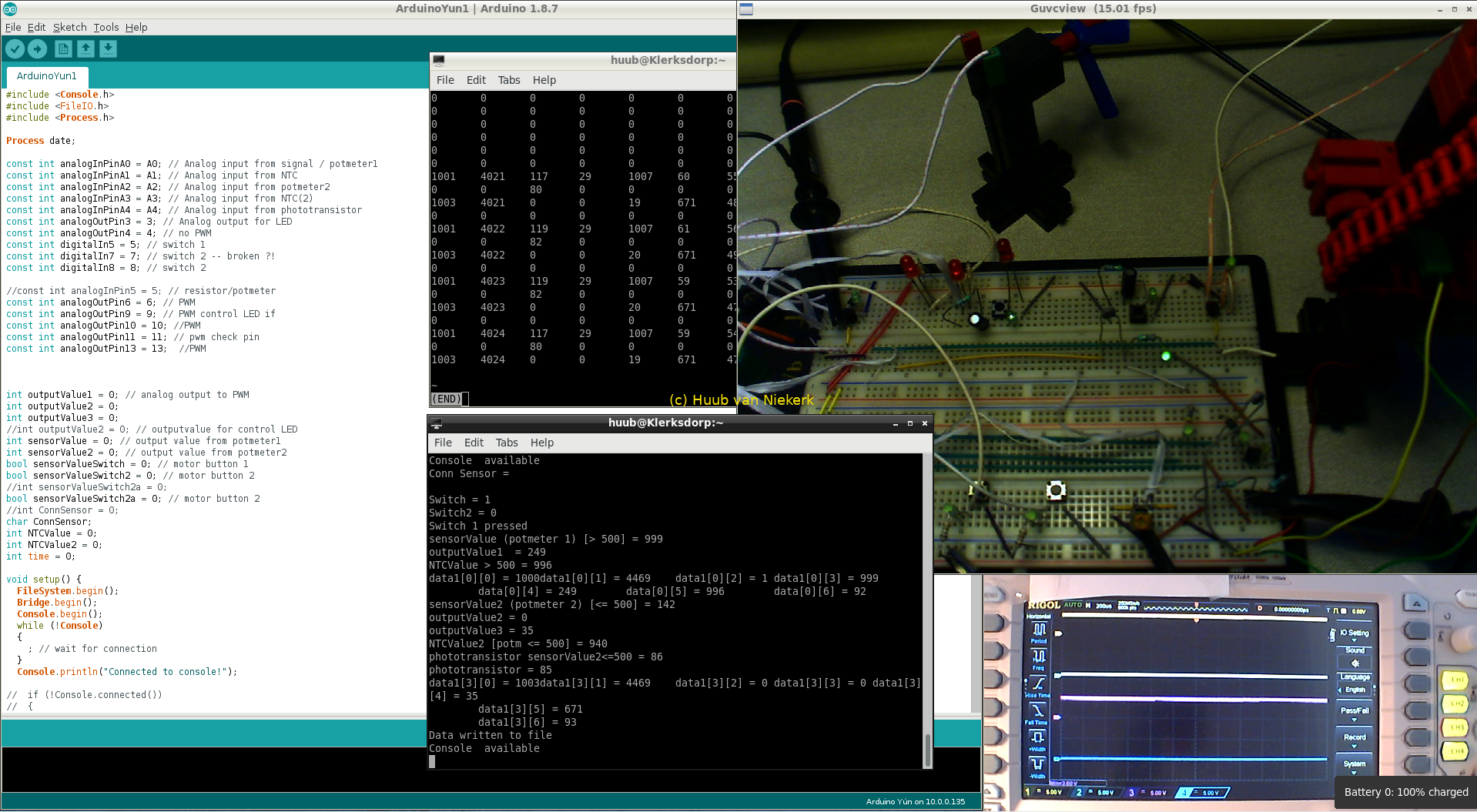
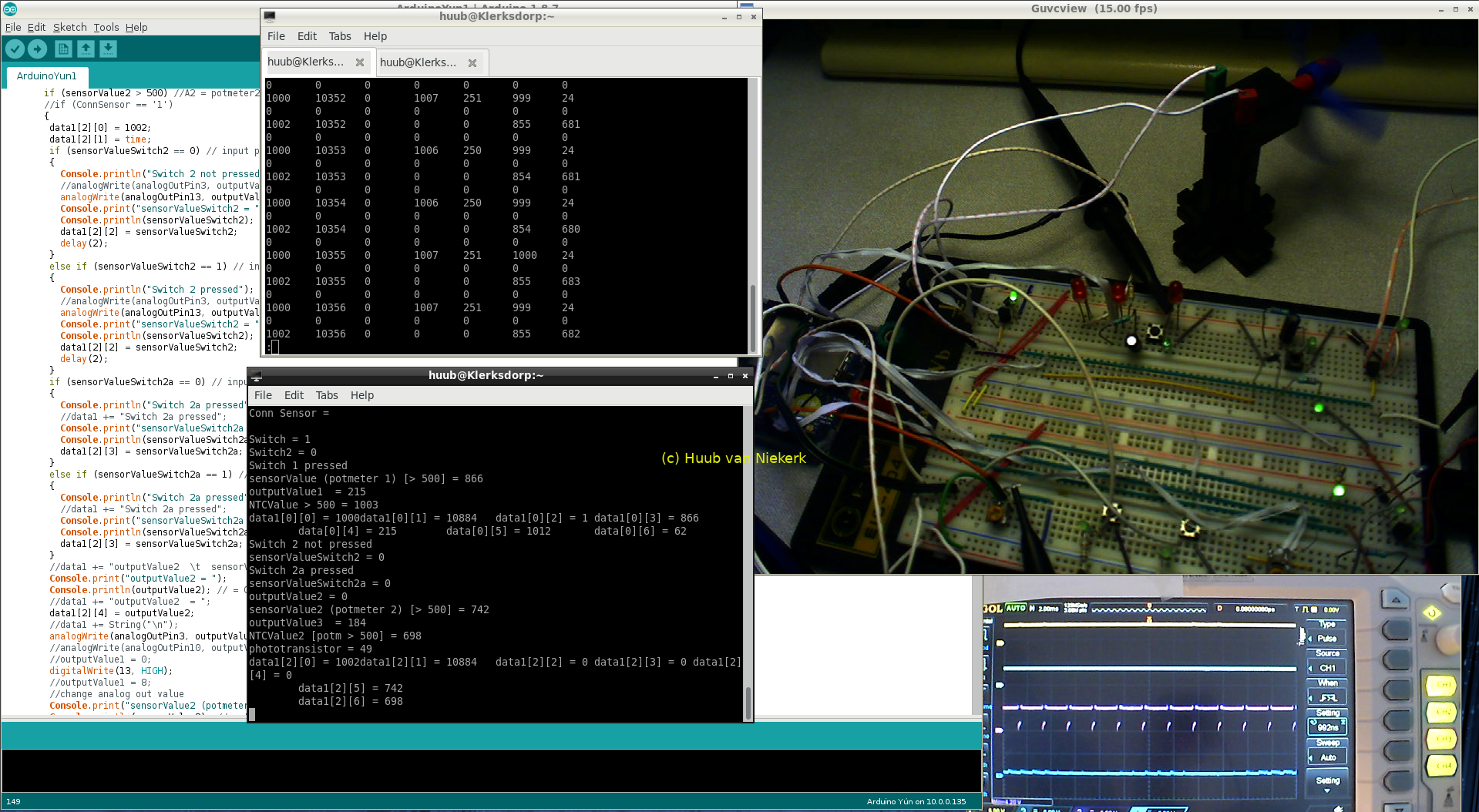
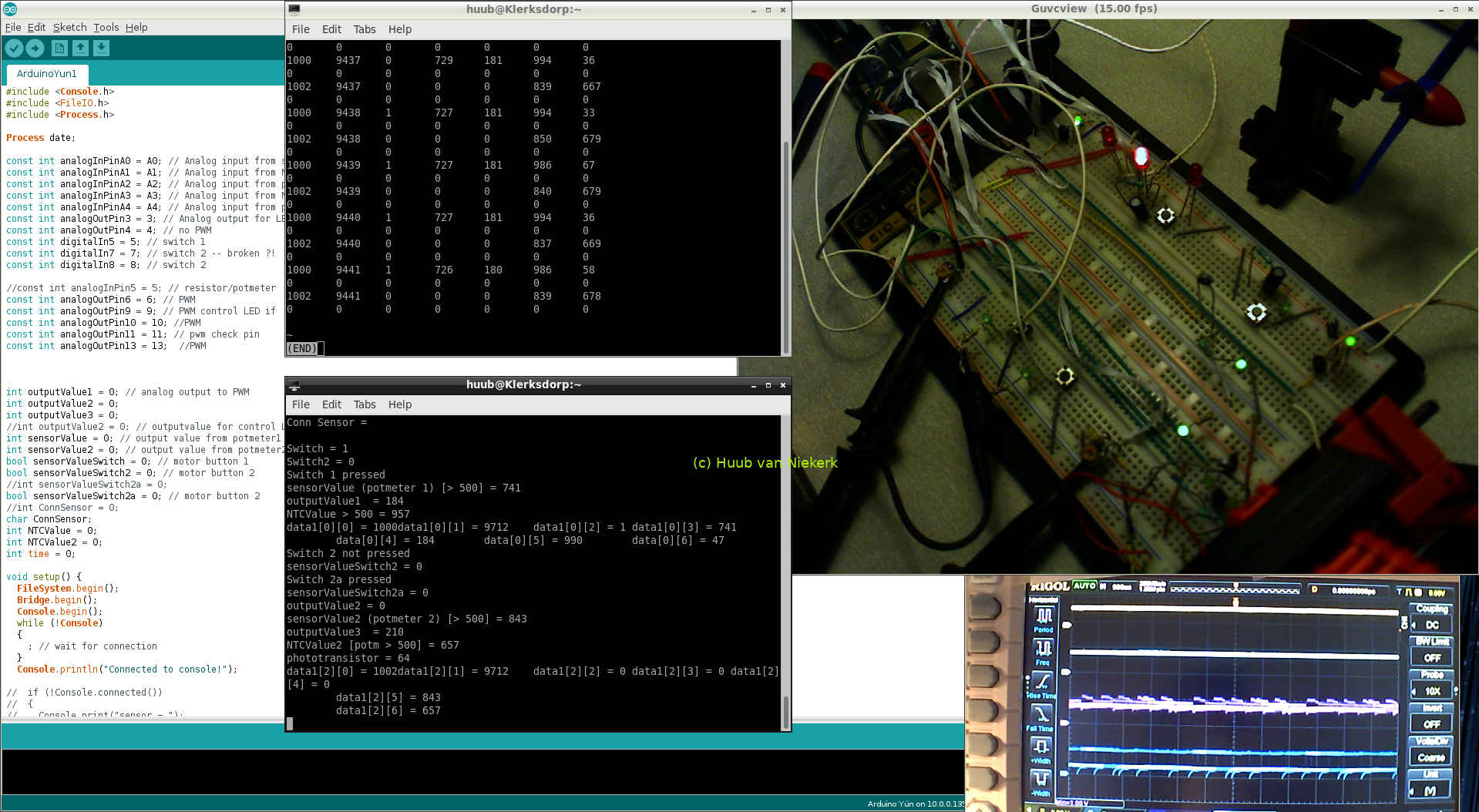
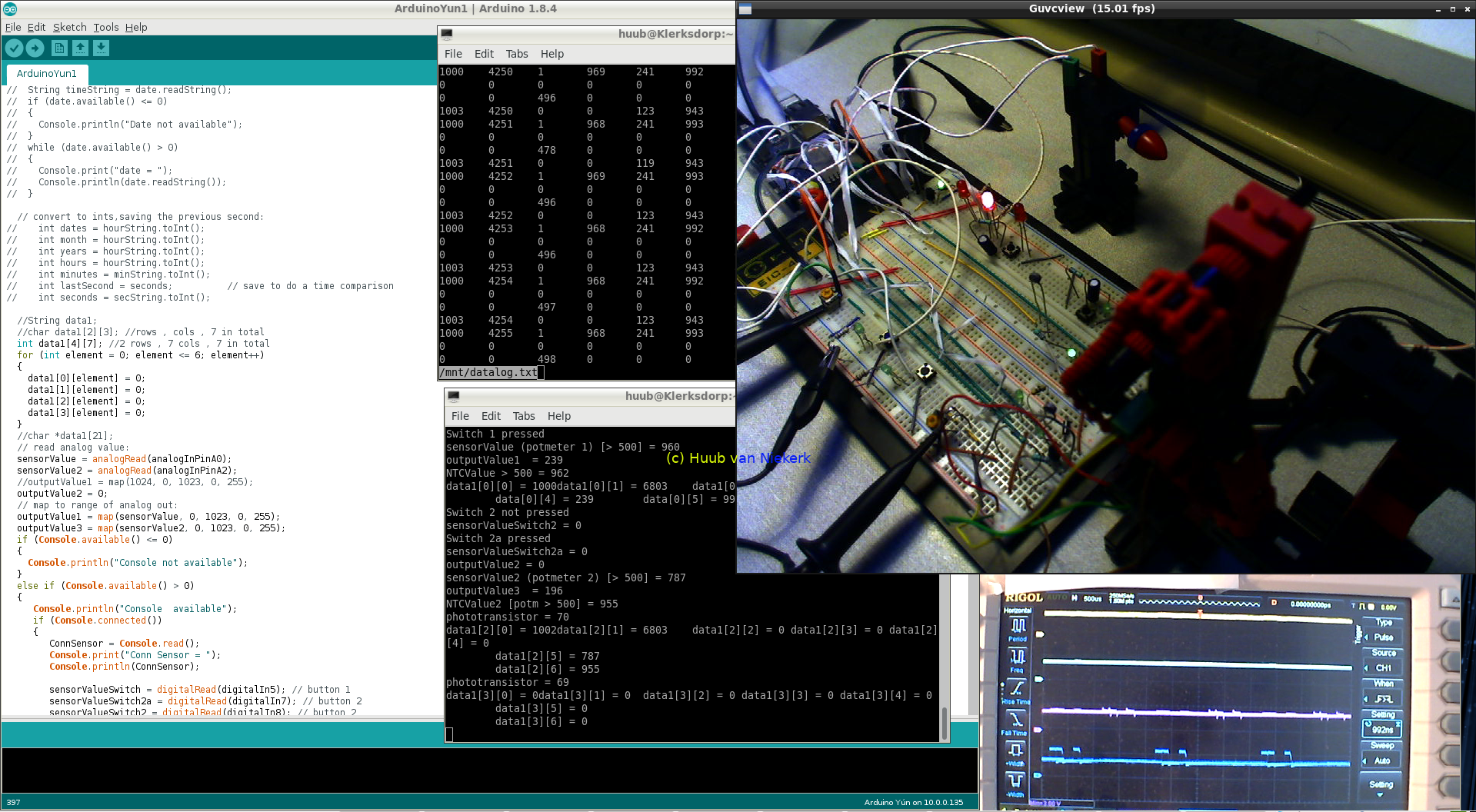
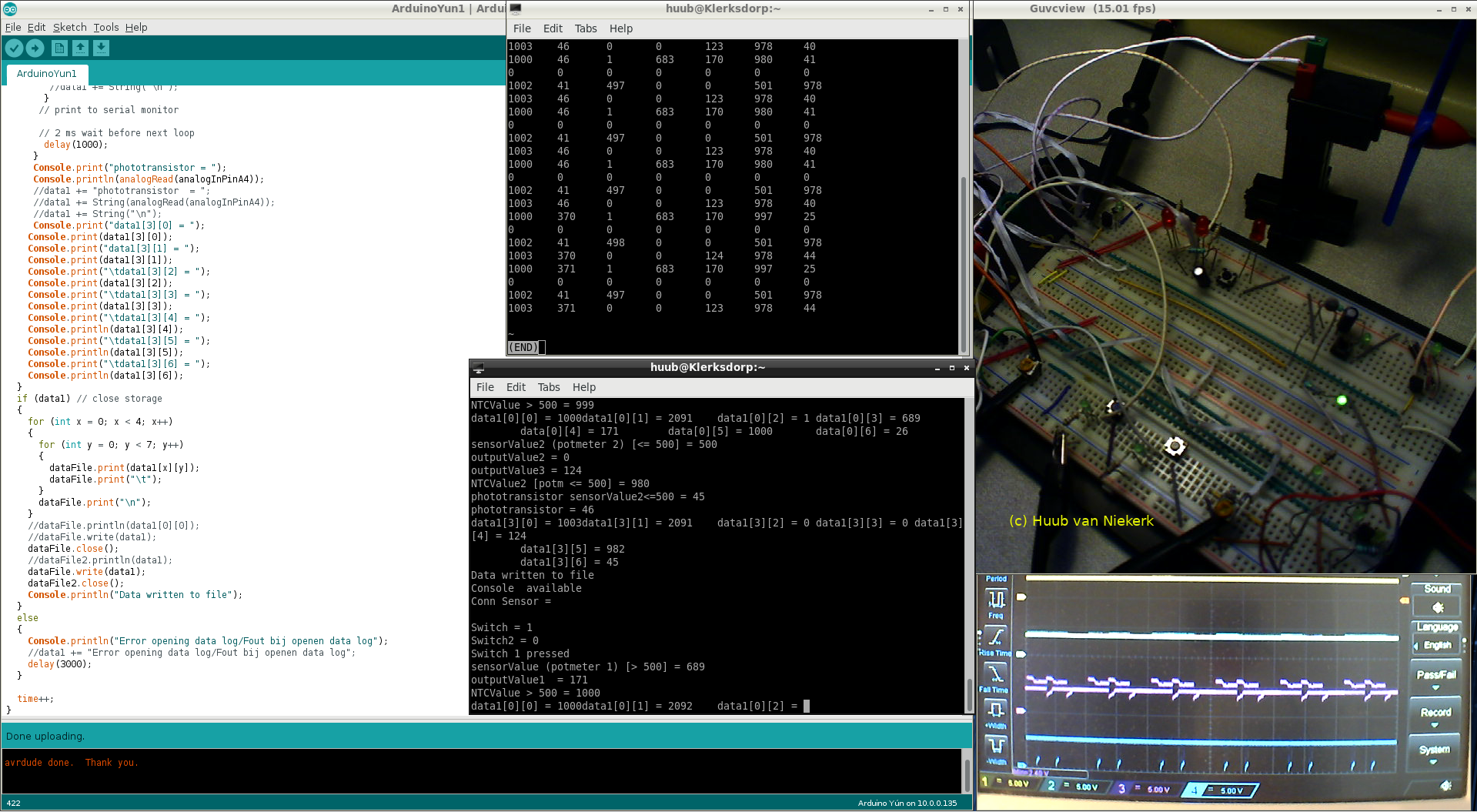
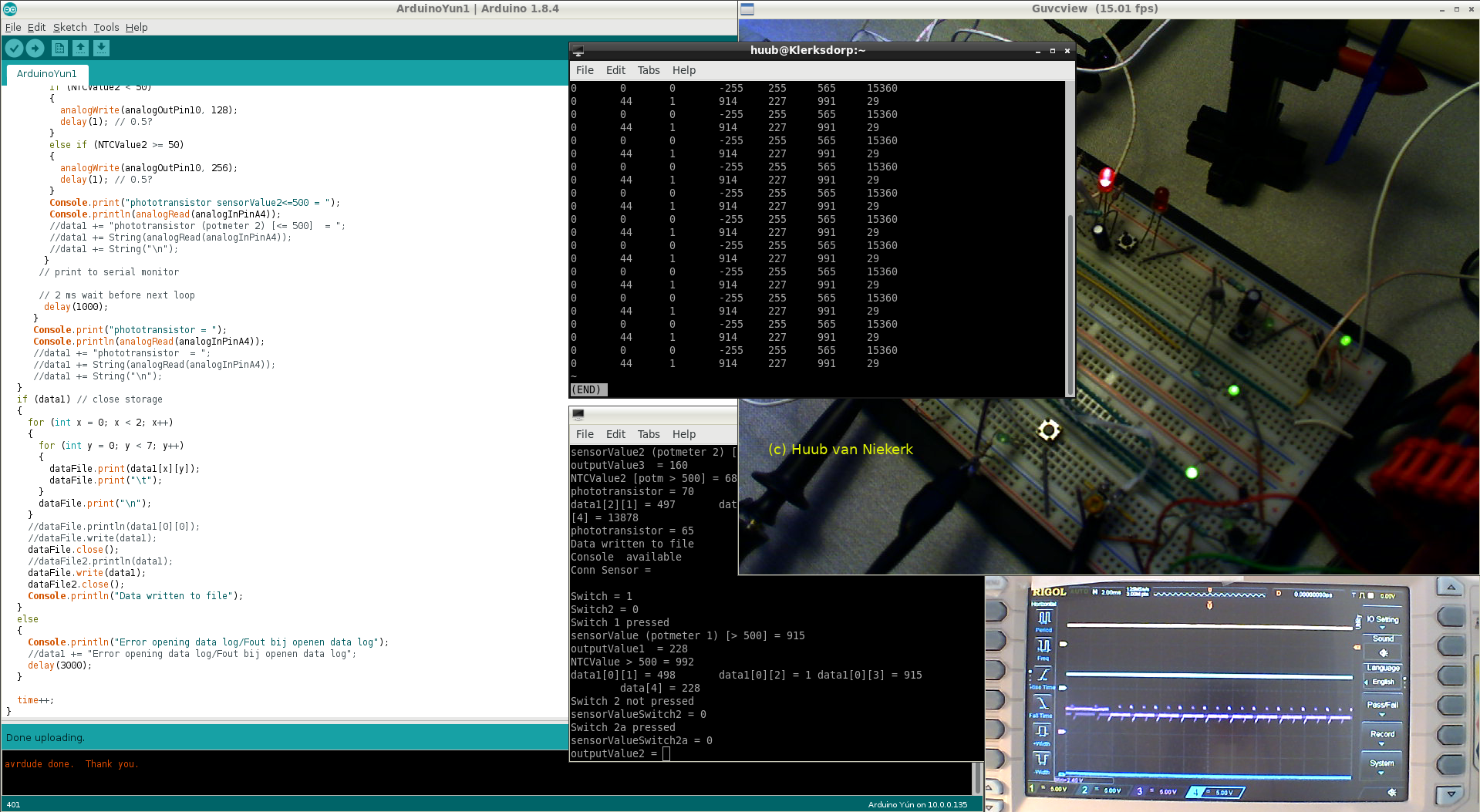
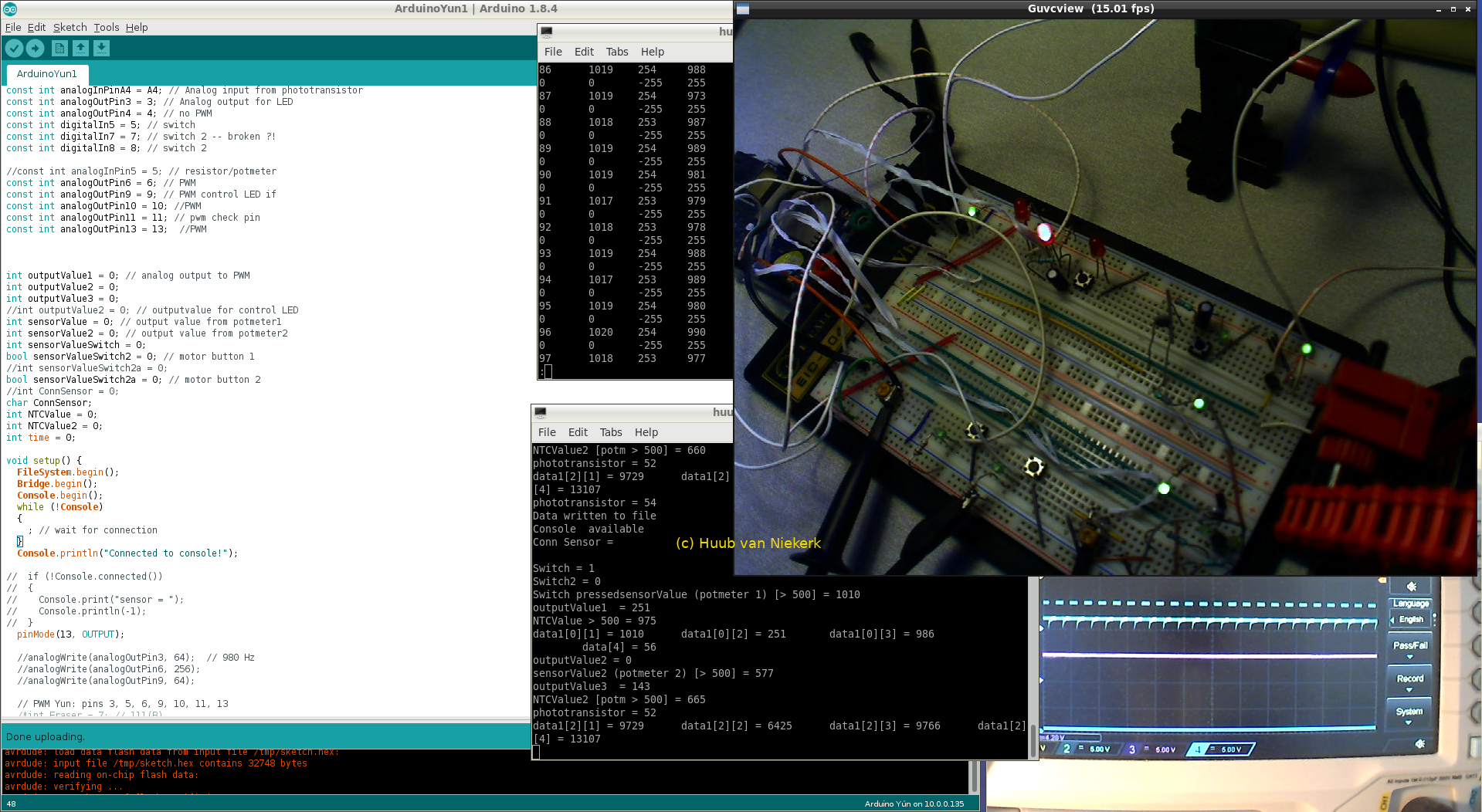
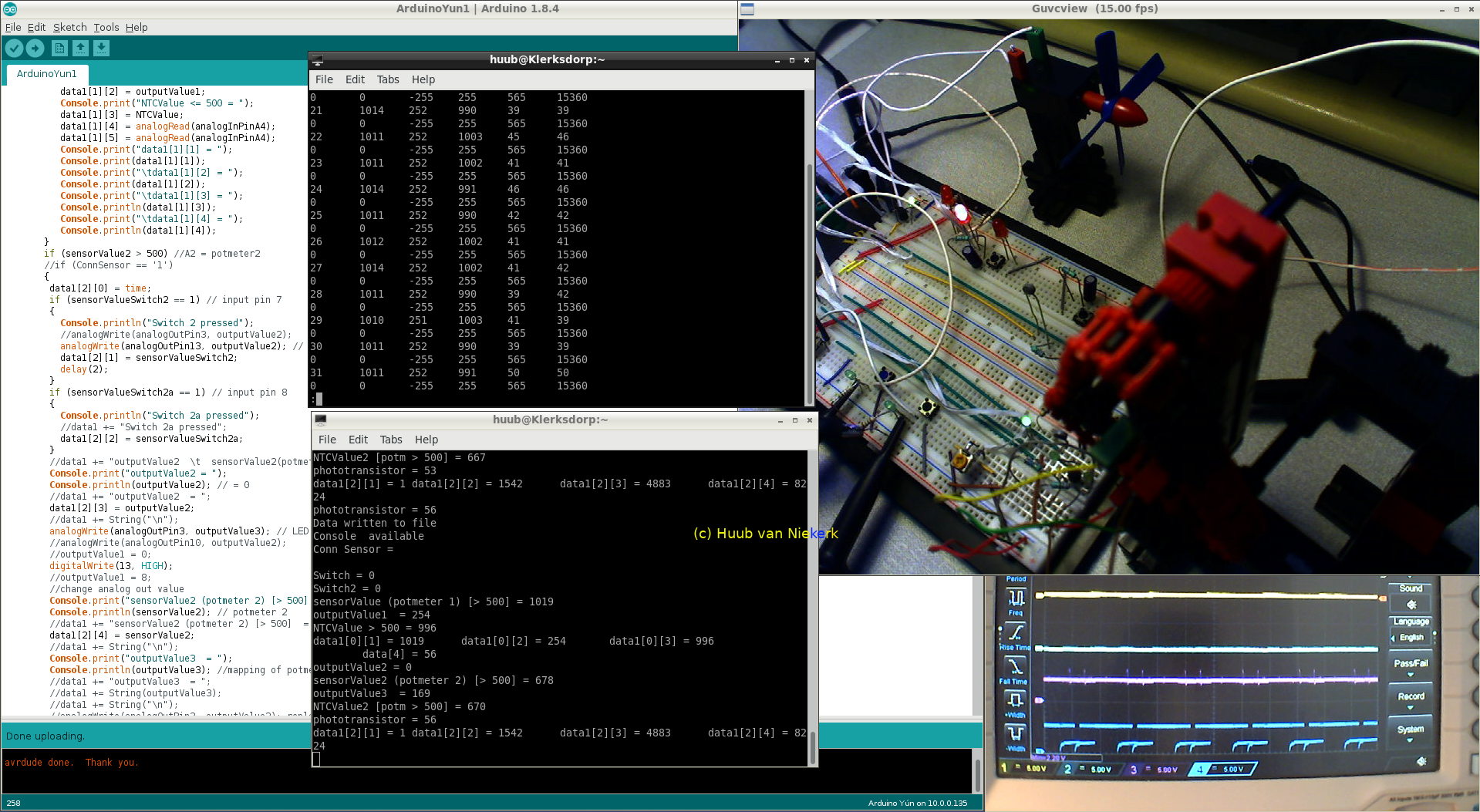
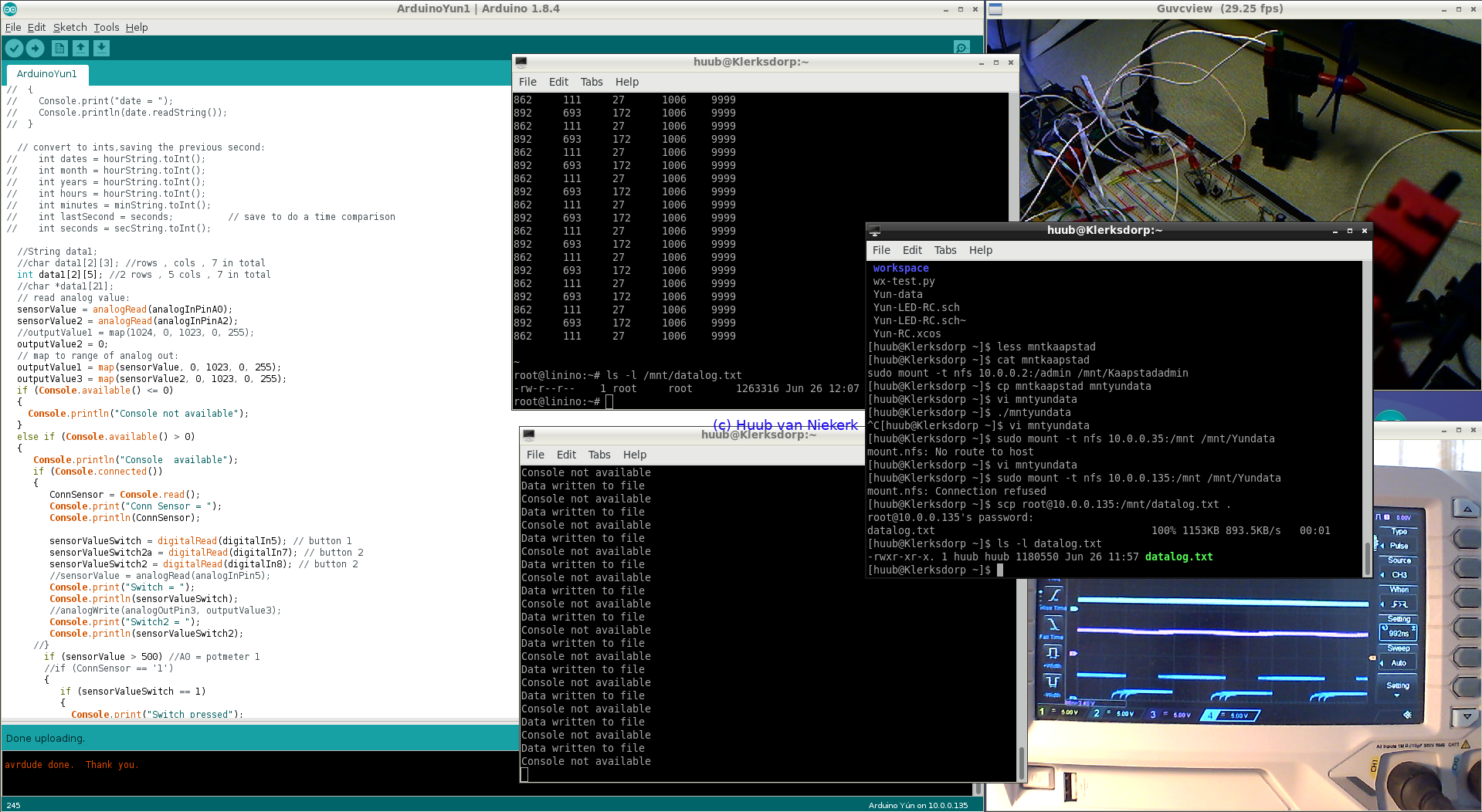
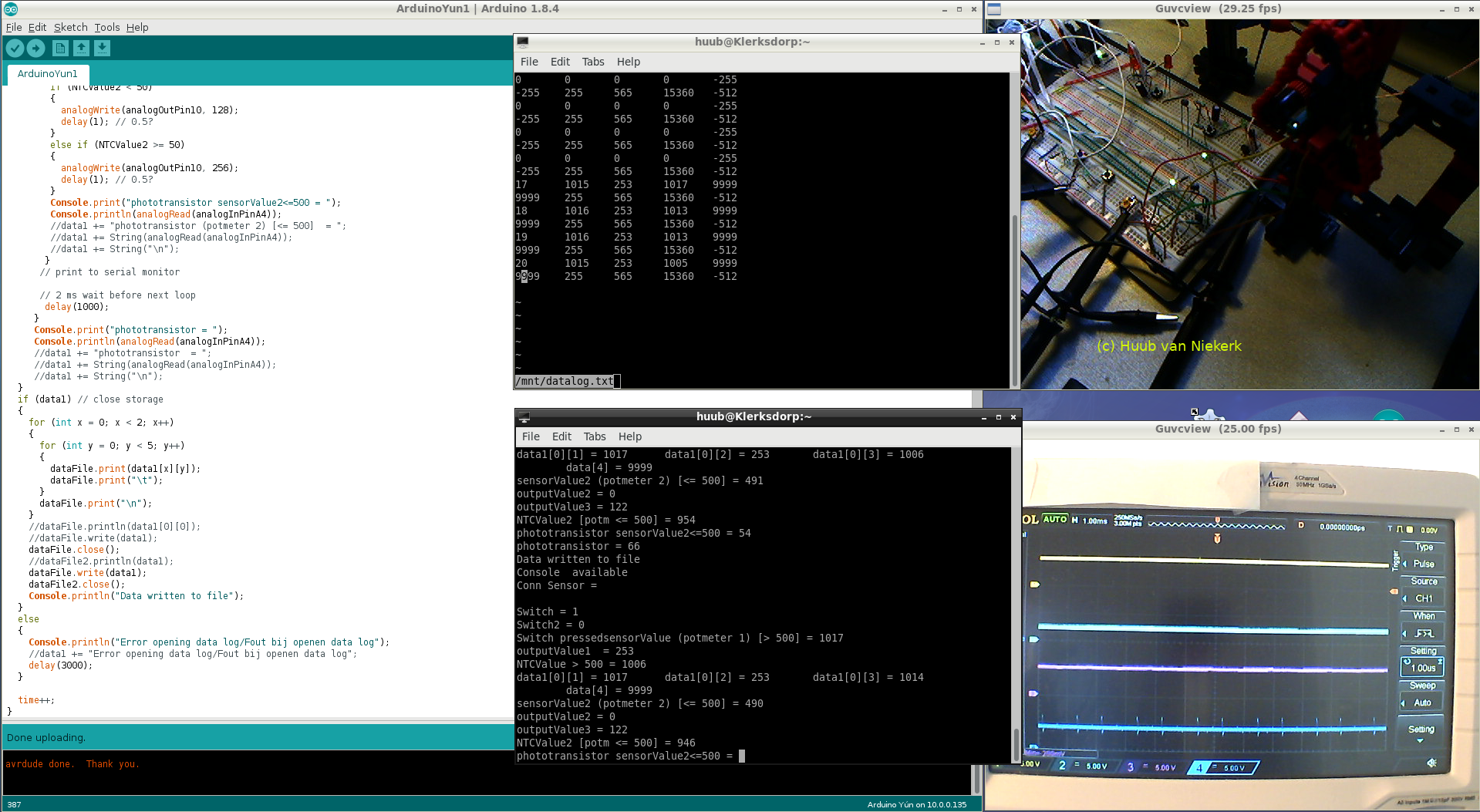
Arduino Yún: Starting with a wiring fix for an LED and a modification for the phototransistor, I find that the oscilloscope has a problem. And after an initial nice start in Octave, what's up? Click the image to watch the video.
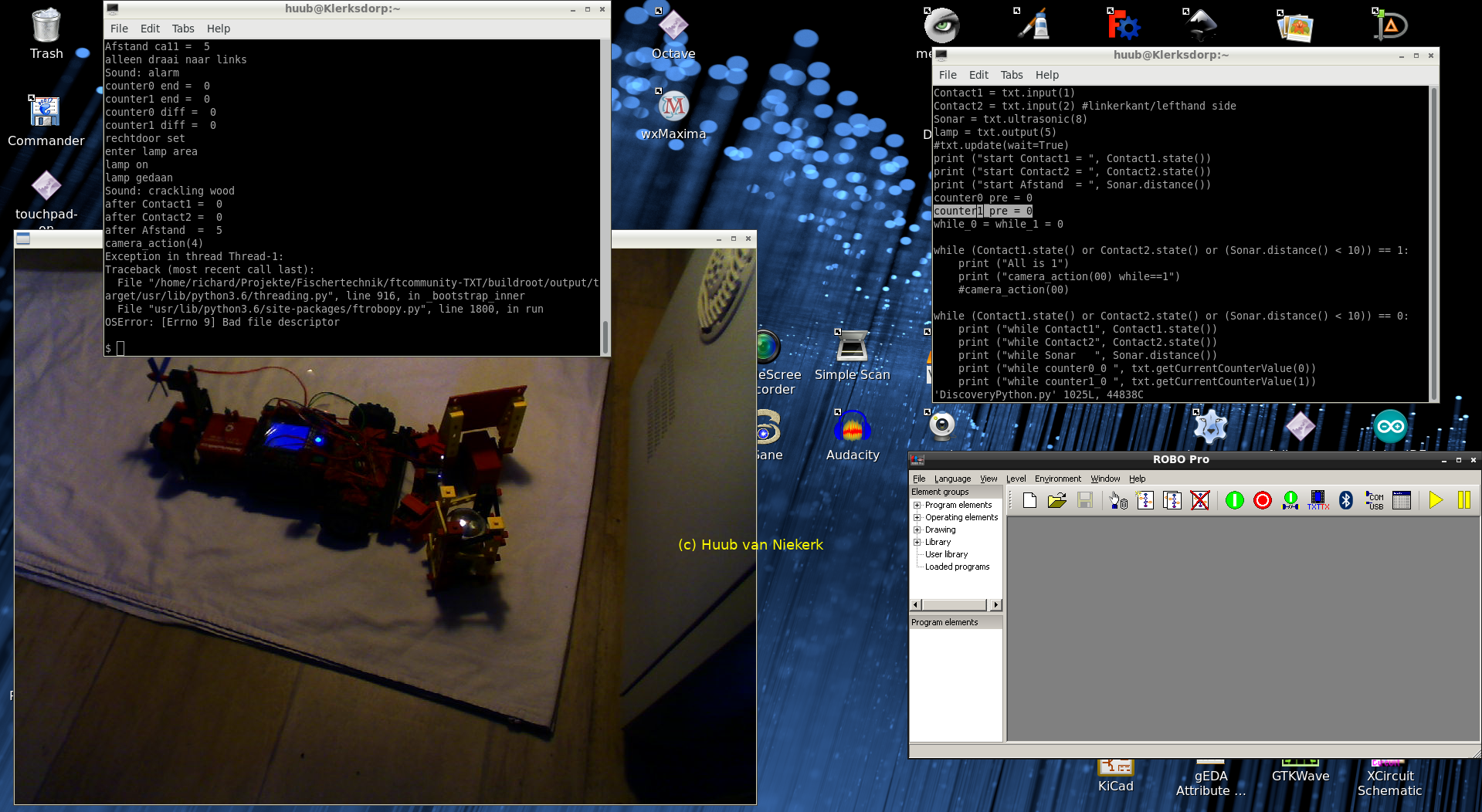
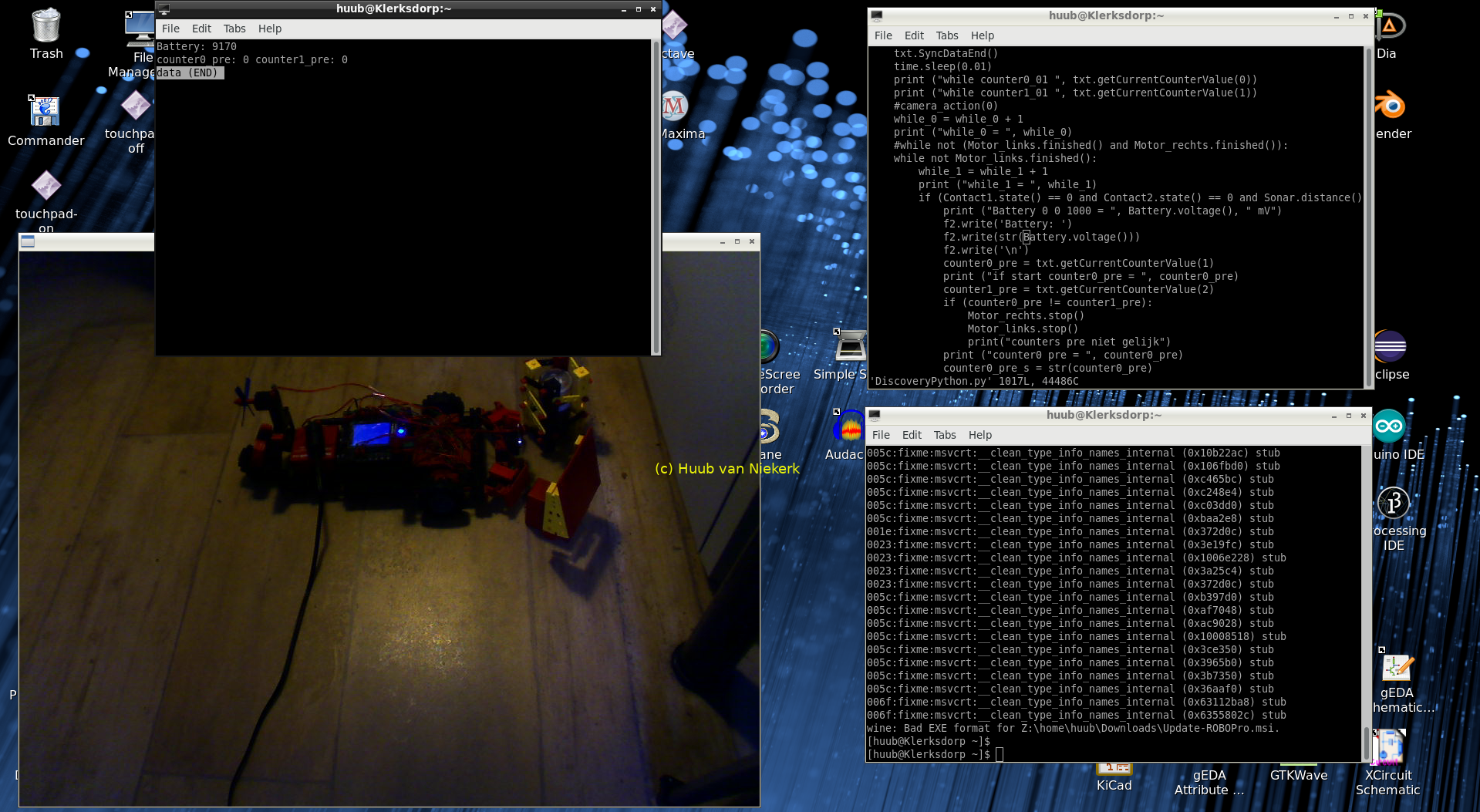
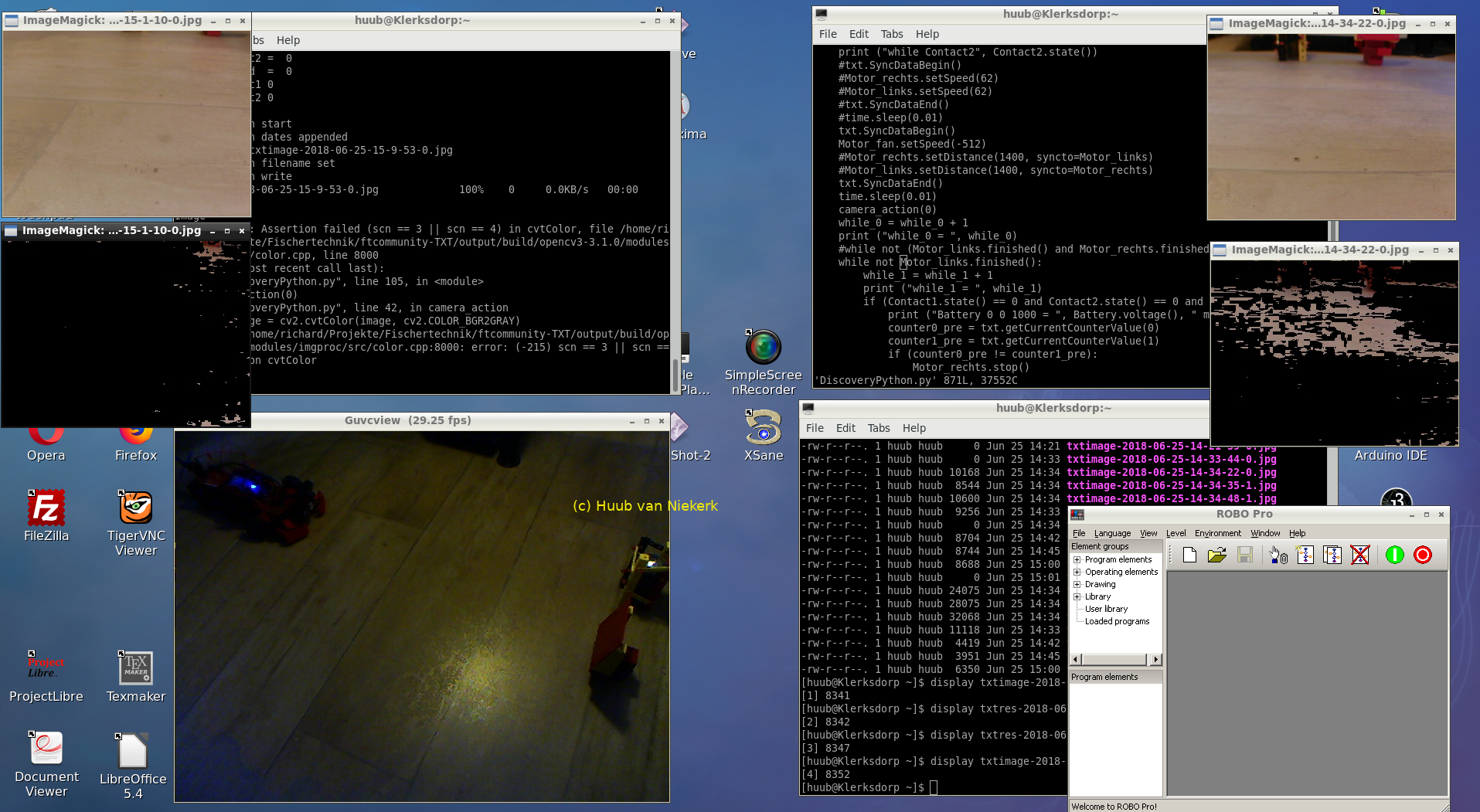
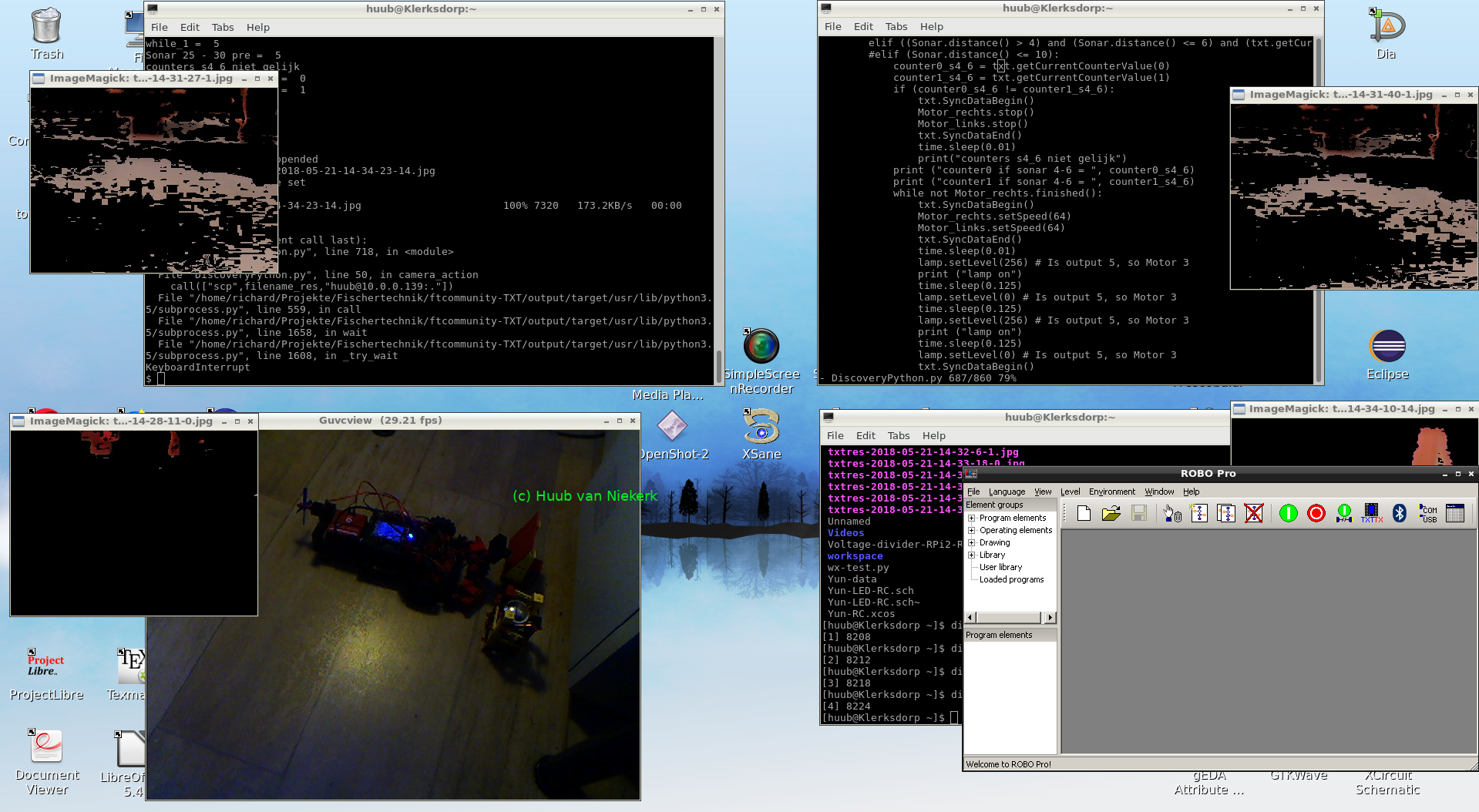
Discovery: Testing the getPwm() and getSyncMaster() methods to determine if the motors are doing as programmed. What does the data say? Robopro for testing battery voltage again. Click the image to watch the video.
Arduino Mega2560 S2: Focussing on input into Octave again, the algorithm must be changed to fill a create a correctly sized vector and fill it. But something still isn't going well at times. Also some questions. Click the image to watch the video.
RaspberryPi2 & ROS: Starting with Bash test to try reading input from phototransistor and button, then checking for gcc compiler 4.6.3. Using Android and MacOSX via VNC. Click the image to watch the video.
BeagleBoard & rollertrack: Another reconstruction: adding a looping. Most results are fine, except the speed: the kinetic energy of a ball isn't enough. But how to change that? Click the image to watch the video.
14 December (Playlist) Blog 301
ESP32: After receiving a nice comment on episode #19, I realized I made a numbering mistake for the keypad. After correcting the code, what happens? Then, the buzzer works, but also causes problems. The servomotor doesn't do a thing once again...until way after recording this episode and letting the everything run for a couple of hours. So what's up? Click the image to watch the video.
Hand: Time to improve the wiring to the pivot and yaw motors. It looks better, but will they work better? And will the overall test work out? Click the image to watch the video.
RaspberryPi: After a long time wating, I gave the raspicam a new stand. Than, time for finding out if I can get xfer to work or need something else. Does the LED even work? Click the image to watch the video.
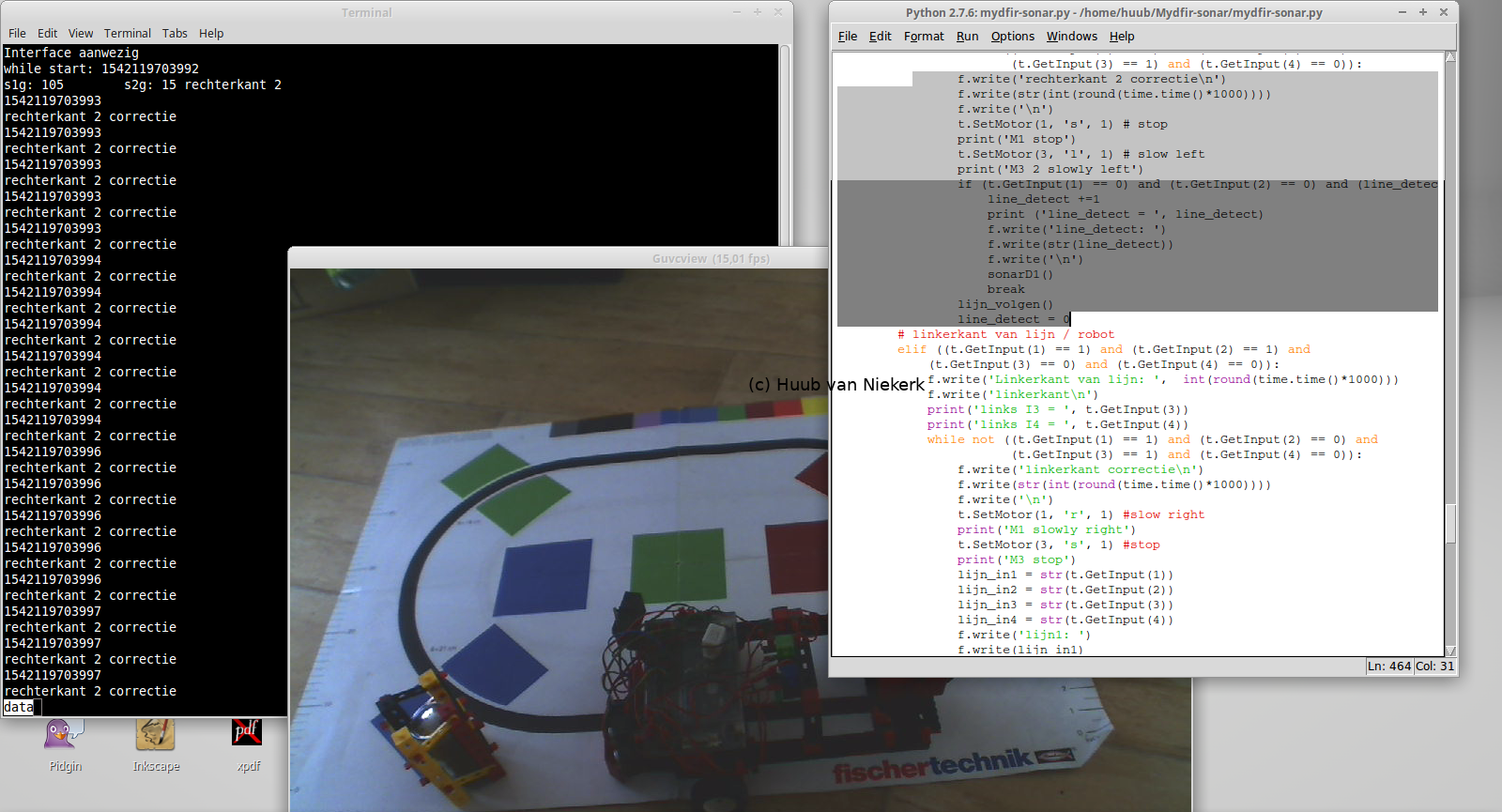
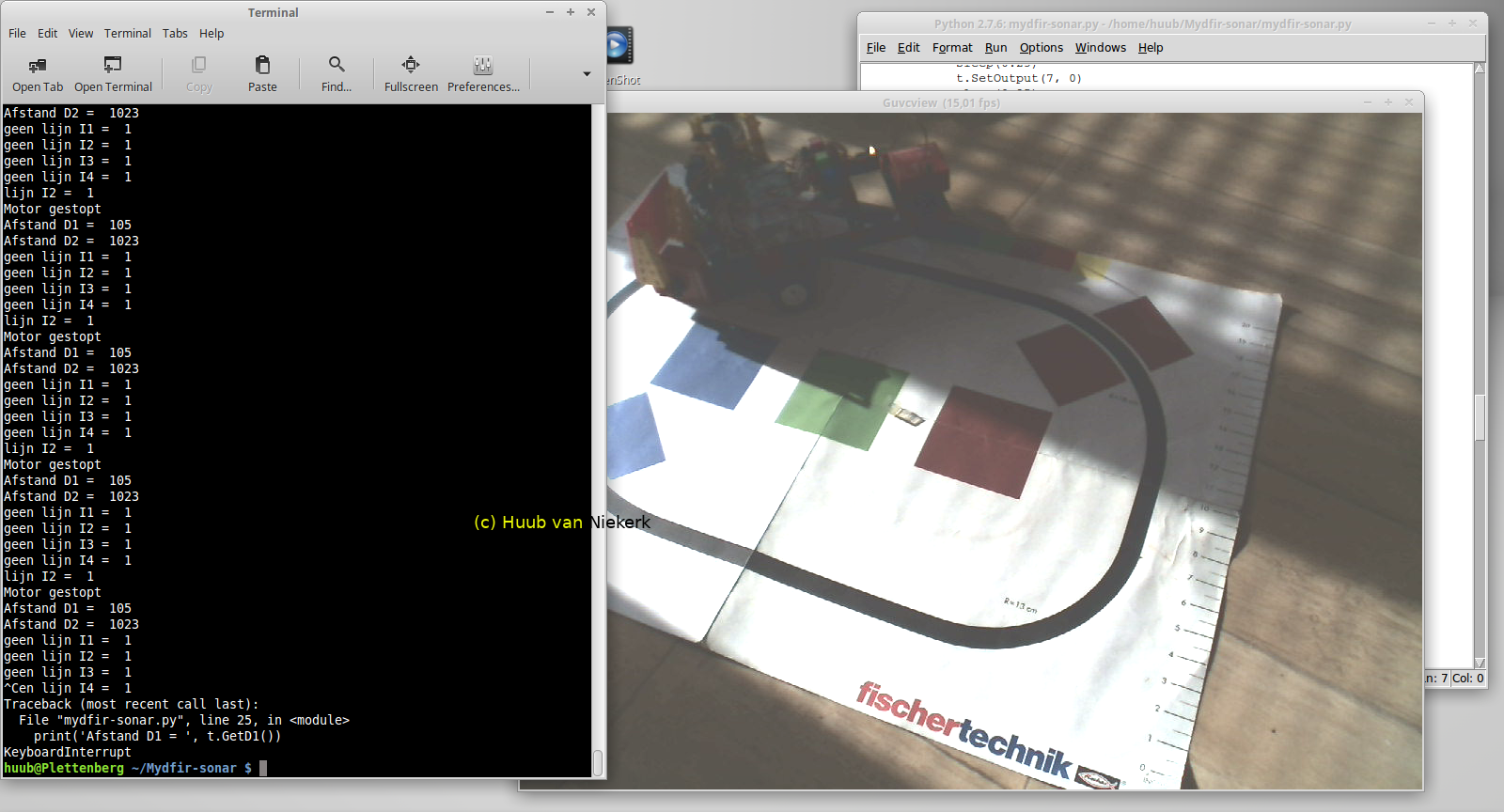
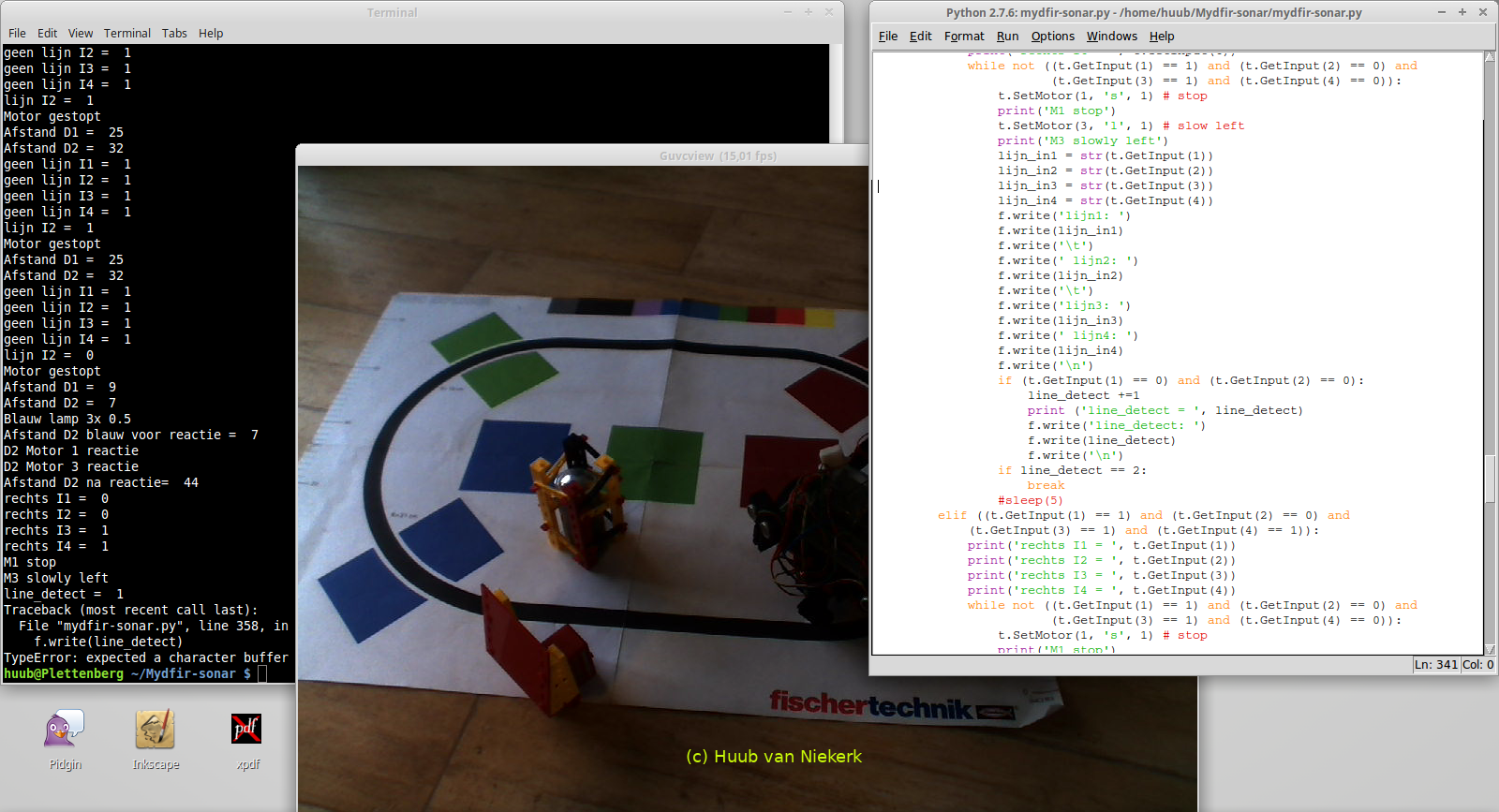
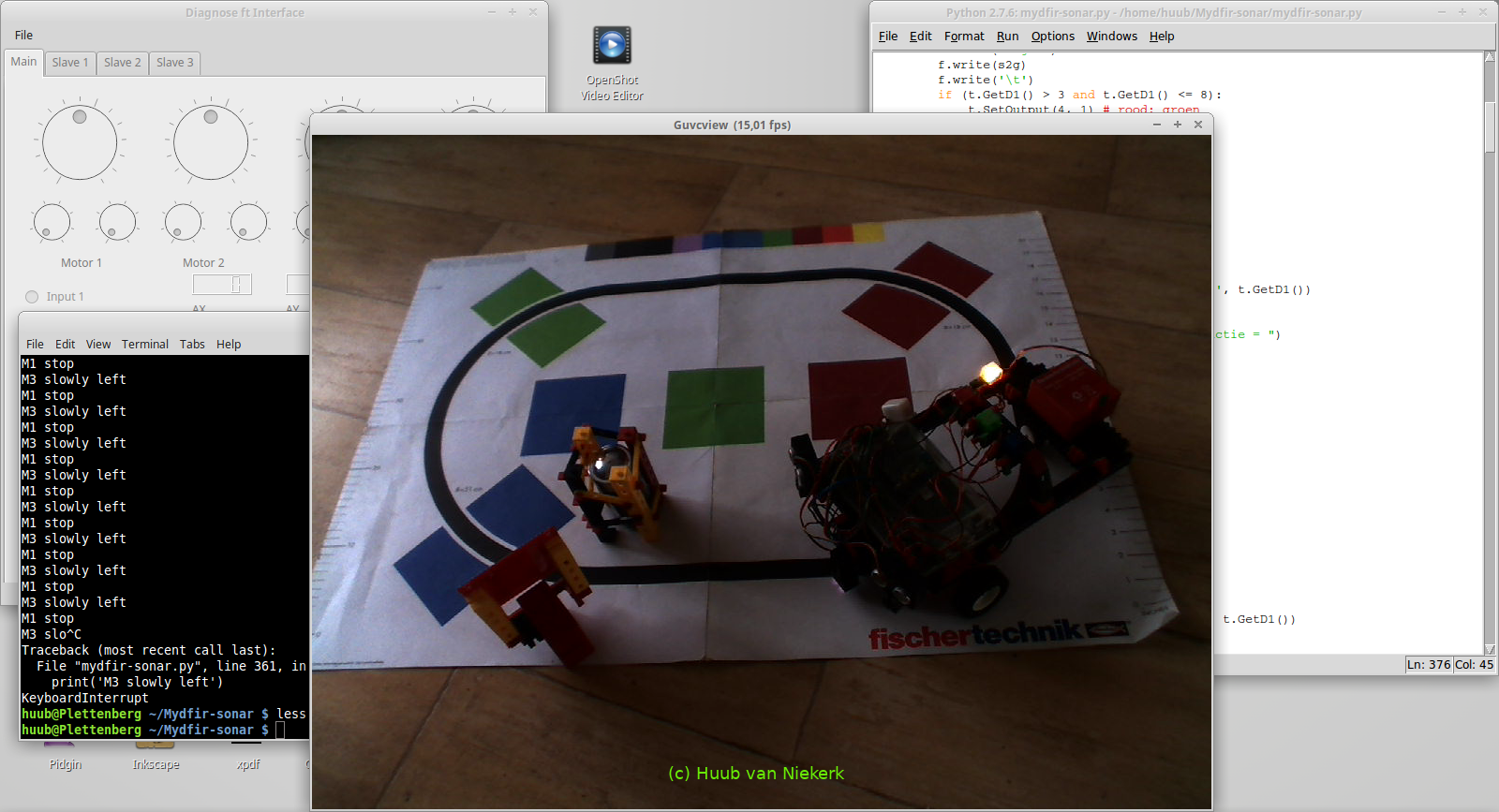
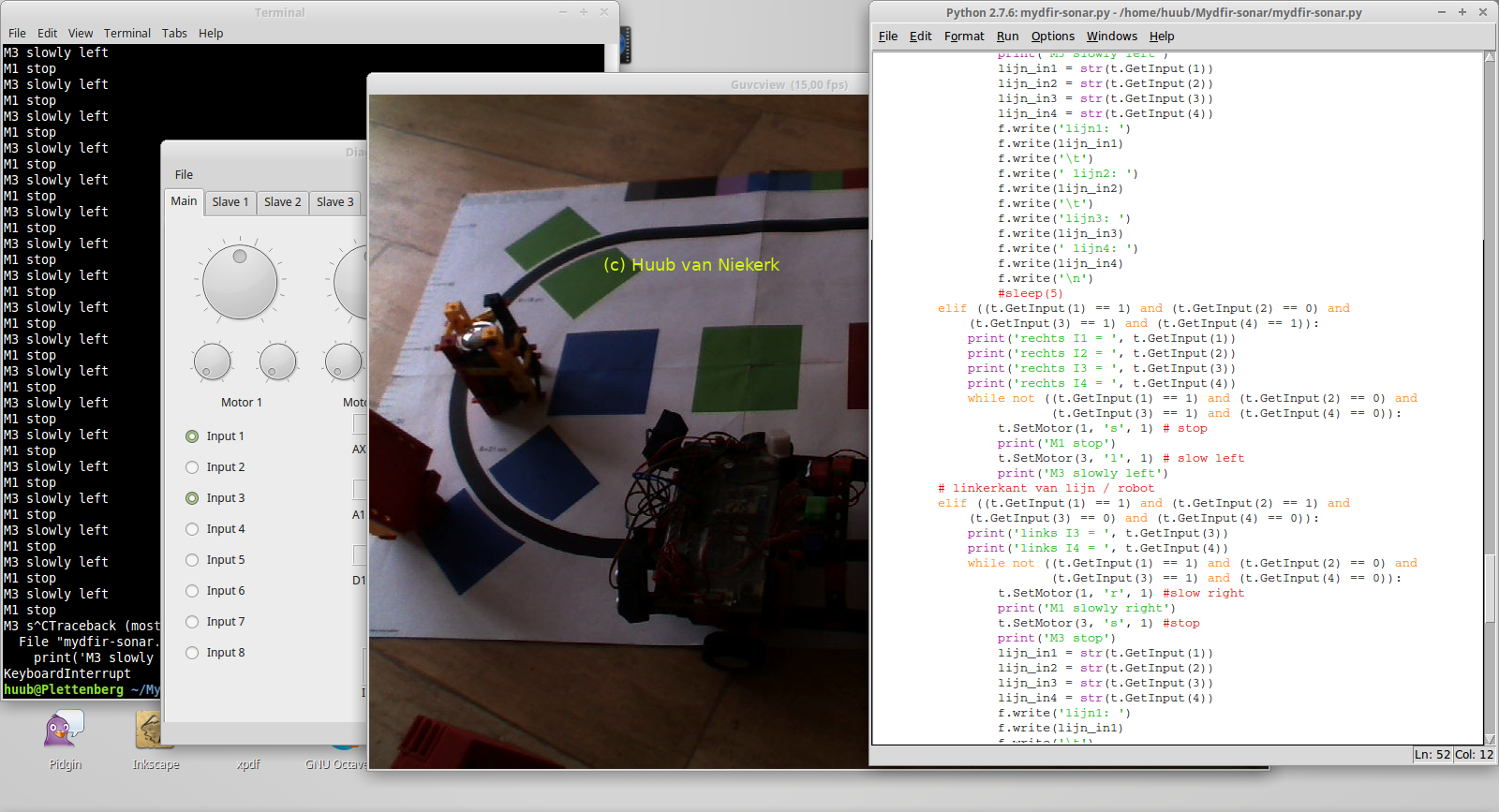
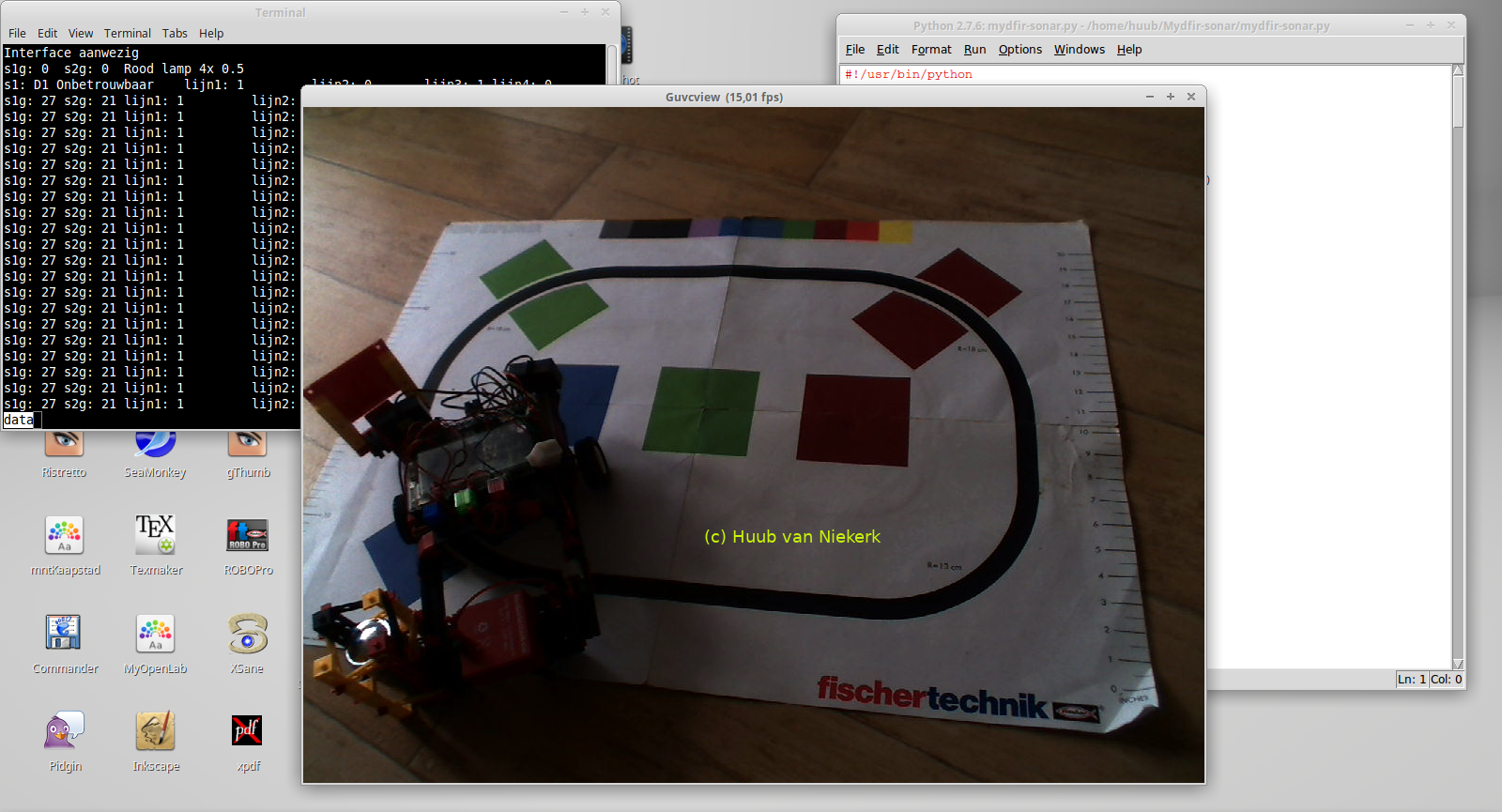
Mydfir: Starting with the 3rd battery, I find more problems with the objects. Using a triangle ruler, I find why 1 object isn't detected. But what about the other? Line following seems to work, to a certain point. Click the image to watch the video.
Arduino Yún: From last time, I need to adapt the Octave algorithm. Of course things go a bit different than anticipated: wiring replacement, some data, connection oops, signals on oscilloscope, Octave oops. Click the image to watch the video.
Arduino Mega2560: Testing the circuit and algorithm again. Then adding a wire to receive digital input. Once again, rtfm and testing show some issues, but zeros() doesn't make things easier. How to solve this? Click the image to watch the video.
RaspberryPi2 & ROS: Checking the new (old) compiler, I'm in for a surprise. What to do? Then Bash again, using Android and MacOSX. What works? What to do? Click the image to watch the video.
7 December (Playlist) Blog 300
ESP32: After the last episode, the connection went very bad. A new attempt is working well so I can test the keypad again. Checking with the oscilloscope, the signals are mostly odd again. But why? Then, why doesn't the motor act? In the end, adding a buzzer(?!), but the pin seems off? Click the image to watch the video.
Hand: Starting with testing pivot and wiring, things start good for a bit. Then further on modifying the elbow for robustness and checking the hand, which gives some wiring inconsistent issues that are quckly solved. What's more to be done? Click the image to watch the video
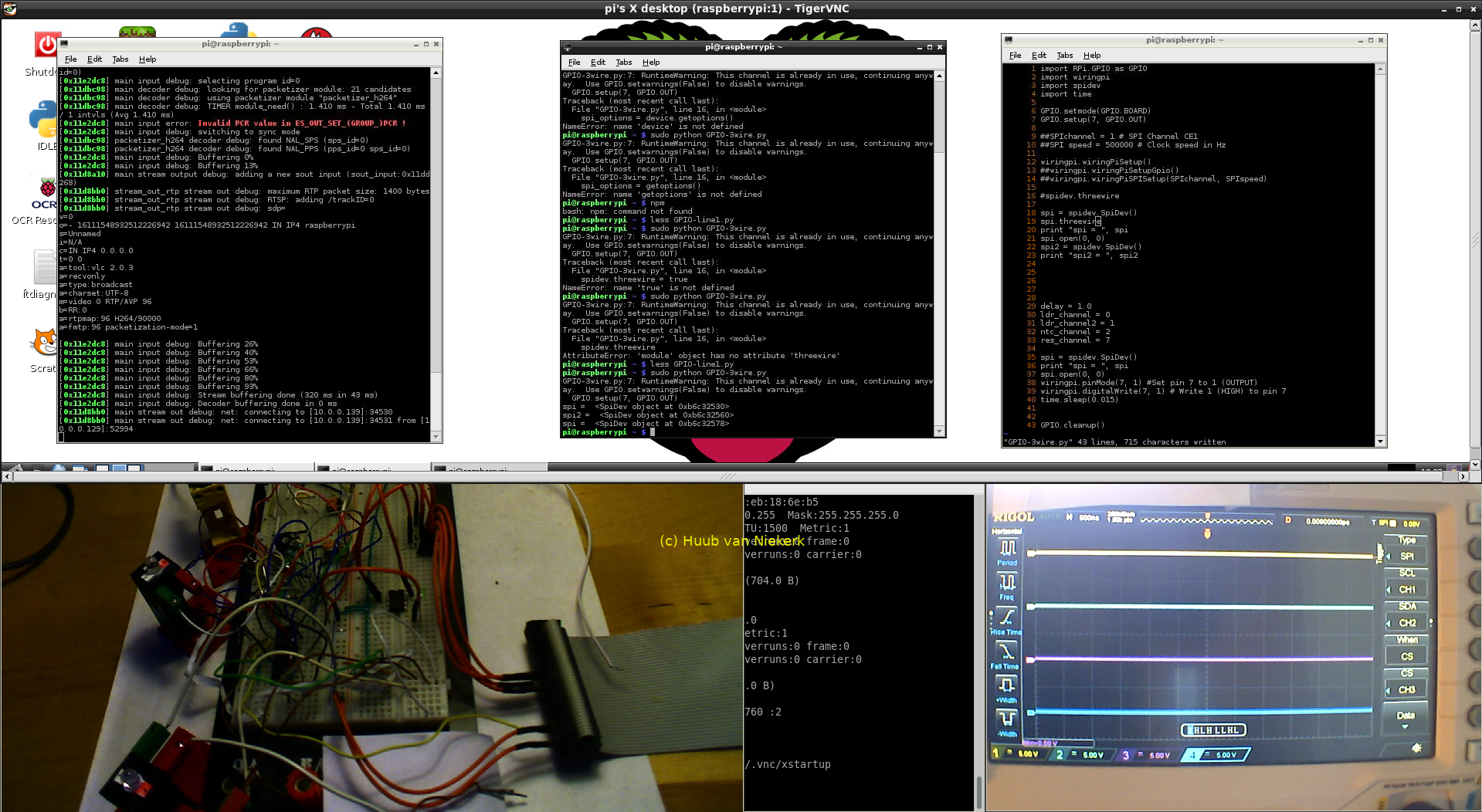
RaspberryPi: Trying again to get SPI 3wire to work on the MAX522. After getting <dev>error again, I need to find out more about the xfer argument and find confusion. What about the MCP3008? Does it still work? Click the image to watch the video.
Mirft2: After a problem start, with a hint by ROBOPro, investigating the filter again. Using the example, I have to get back to HSV and end up with a different issue showing up at GIMP. Finally, some modelling with Blender. Click the image to watch the video.
Mydfir: First I try the battery that failed last time. Then I continue without objects and analyse the data, but it's too much. Introducing the objects, but in a slightly different way. What's the difference? Click the image to watch the video.

Arduino Yún: First focus is a reconstruction of fischertechnik mechatronics to replace the underpowered lamp, which leads to rewiring. Then, after acquiring new data, I find that a small oops in data leads to a big oops in Octave. Click the image to watch the video.
Discovery: Another reconstruction of the hind wheel is needed, but how to do it? Then trying to get more data from the log about the sensors and motors. But what does it tell me, if anything? Click the image to watch the video.
Arduino Mega2560 S2: Focussing again on control via Octave: why does only 1 for-loop work? Apart from fixing some typos and the usual debugging actions, I find once again an od
dity with for- and while loops. But will it work this time? Also, what happened to the Arduino memory?! Click the image to watch the video.
RaspberryPi2 & ROS: Checking the GPIO, eletronics and fischertechnik again with Bash, only 1 doesn't work. Also the Android works. Back to C++: a new search reveals what should (could) be the culprit, but how to test it? Click the image to watch the video.
BeagleBoard & rollertrack: I have to do more reconstruction since the balls need proper pickup, but after some analysis I find that much more adaptation is needed, including the trajectory. Will balls leave the track? Will more balls ease it? The chain causes more than 1 issue. Click the image to watch the video.
30 November (Playlist) Blog 299
ESP32: Focus on the keypad again: checking signals when pressing keys and inspection of the keypad leads to a surprise conclusion. But will it work? The servomotor again does nothing and the probe shows nothing. A probe change reveals an oddity, but why doesn't it work? What's up anyway? Click the image to watch the video.
Hand: Starting with testing all, I focus on the base pivot motor, the pitch gears and the elbow. A quick test of the hand reveals no issues. The pivot motor has a wiring issue again and the pitch works after a jolt, so both need a better solution. The elbow has a serious stability and robustness issue. But how to solve it? Click the image to watch the video.
RaspberryPi: Further with the MAX522 and Python. Some vague error seeminly requires a change in algorithm and change in Python version. But despite several changes and comparisons, what's up? Then Android again: what works? Click the image to watch the video.
Mirft2: After a bad start and reboot, ROBOPro gives a familiar bad result while ssh works. Trying HSV again, with objects in a different position and adapting with a filter according to this, leads to a conclusion. Then on with Blender3D: counting parts and changes. What to do? After wrapping the video, ROBOPro works. But why?! Click the image to watch the video.
:Mydfir: Focus again on the datalog, but first some power issue to solve. With a surprising (and disappointing) conclusion. Going on, something is interfering between line and sonar. But how come? What's gone wrong with the KISS principle? Click the image to watch the video.
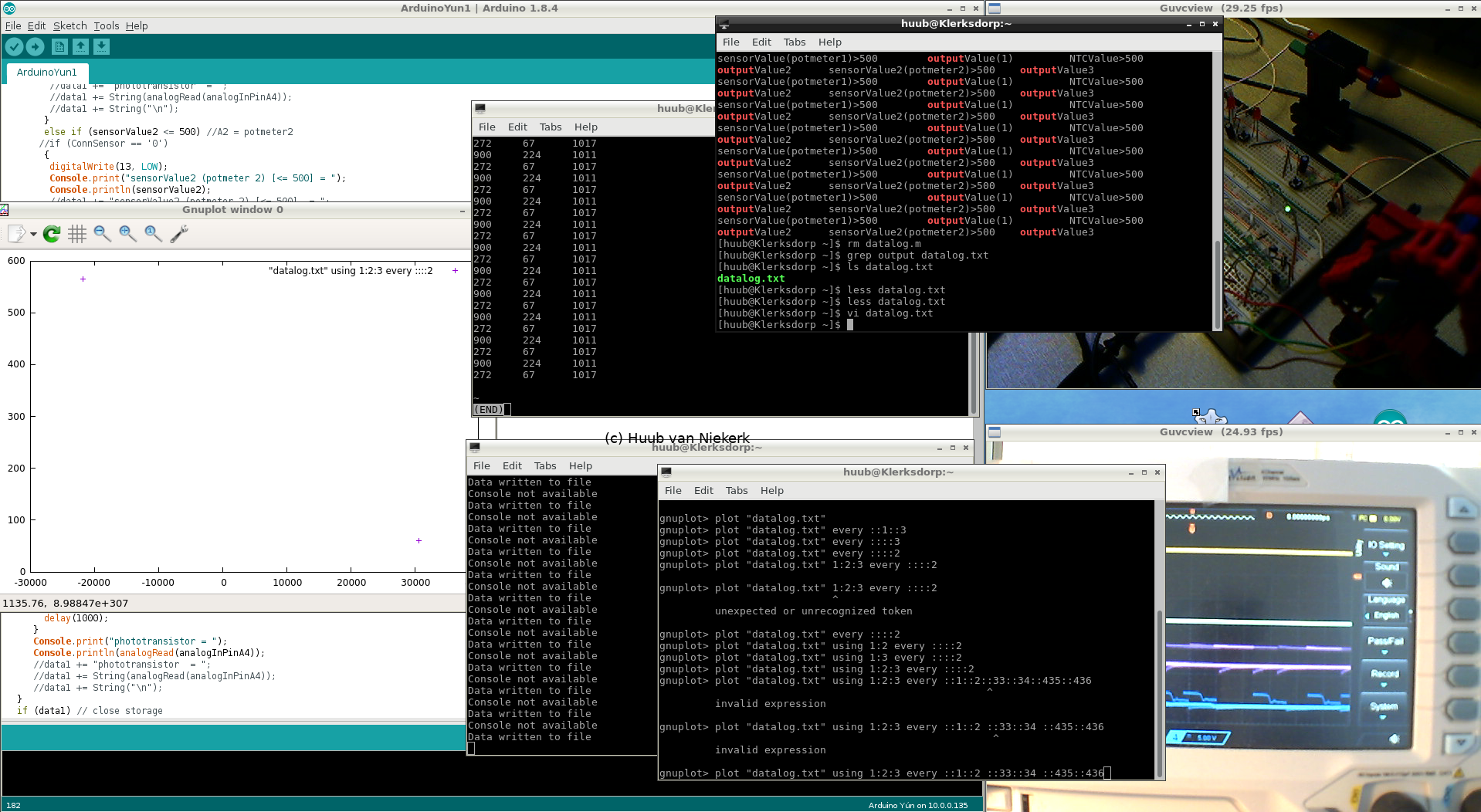
Arduino Yún: First, using the datalog of last time to improve & change the graphs in Octave with time vs rest, adding legenda. Then focussing on the fischertechnik mechatronics and finding more issues than expected. How to solve them? Click the image to watch the video.
Discovery: First, 3 tests that reveal something needs to change with the hind wheel. Then, adding more items to the datalog and finding that too many times copying code doesn't always add up to clarity. And will ROBOPro work this time? Click the image to watch the video.
Arduino Mega2560 S2: By installing some new software, I'm finally able to connect Octave to the Arduino. Then creating some code to do the same as in AVR C, to see if things will work. Then, using the oscilloscope, I find some oddities. Click the image to watch the video.
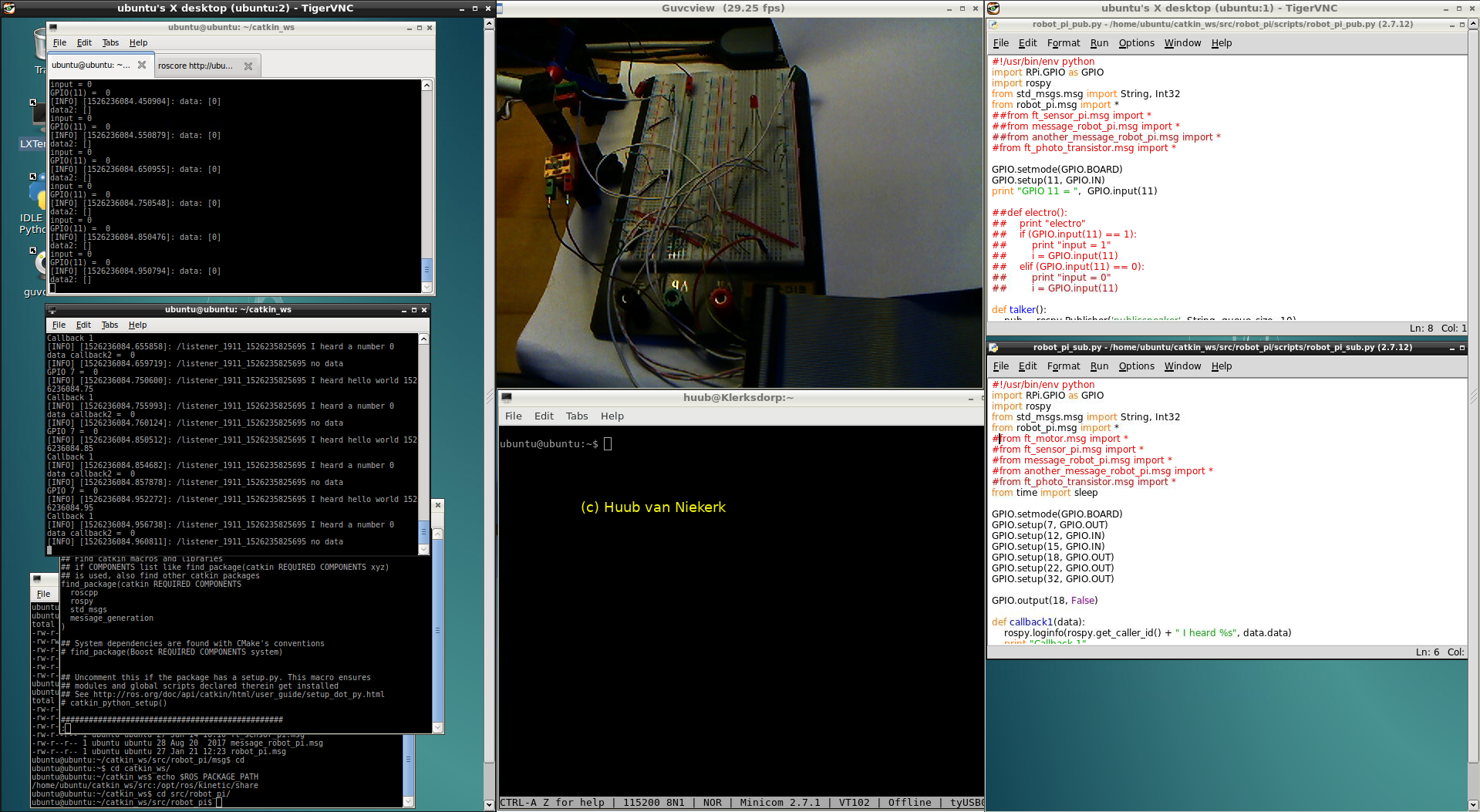
RaspberryPi2 & ROS: Starting with an sdcard oops again, I find that I need a wiring fix for the GPIO. Then, the publisher still goes wrong but some new errors. Analysis point into a somewhat different direction, but how to solve that?! Click the image to watch the video.
BeagleBoard & rollertrack: More reconstruction of the track and having weird issues of connections. What stops: VNC? USB? RoboInterface? Even the Android stops, so probably VNC. Then again, that's why I changed from WiFi to wired. So?! Testing the track, does it all work? Click the image to watch the video.
23 November (Playlist) Blog 298
ESP32: The keypad needs to be rewired to to ESP32 and the algorithm changed for GPIO and sequence. Will it all work? Does the servomotor what it should do? Also, the 7segment display should be rewired. Click the image to watch the video.
Hand: Another overall-test shows an issue with the pitch gears. The diagnose software solves it, for now. Then the wrist again, with the yaw. Here it doesn't go as hoped. Nothing new, but things seem to go worse. So what's up? Click the image to watch the video.
RaspberryPi: Another try to control the MAX522 iwht SPI - 3wire. Now I know the driver, but how to go on? What's with the boolean? Playing with the code, I find something weird. And not just with this code. So what's up? Click the image to watch the video.
Mirt2: Trying to fix the HSV colourspace using the wheel-website, but this proves harder than expected. Next, back to modelling with Blender and comparing with the real thing. This leads to some changes. Click the image to watch the video.
Mydfir: Trying to improve the timestamps in my data file, I need to change the algorithm. Then using diagnose, I find a problem with the linesensor brightness again. Apart from that, it harldy drives. Why? Click the image to watch the video.
Arduino Yún: After gathering more new data in a new file, I look at how the subplots should be. Then I find out that I make a big thinking mistake. This leads to some more Octave programming and realizing that I put wrong data in the plots. Also, which data is what? Without a legend, data means nothing. Click the image to watch the video.
Discovery: Once more, the focus is on the datafile, so adding more distance readings. This gives some strange results, casting doubt on the either the manual or the API itself. But how to be sure? Also, it looks like the hind wheel isn't really done. Click the image to watch the video.
RaspberryPi2 & ROS: First testing the GPIO using Bash, then comes a big oops. After recovery, what still works? Bash? C++? Another unpleasant surprise leads to changing the algorithm and remake. But why did it happen Click the image to watch the video.
BeagleBoard & rollertrack: A reconstruction of the track is needed to get better results. Some the signalwire needs a ground, but why? Finally, VNC is tested via the Android: will ^C work this time? Click the image to watch the video.
16 November (Playlist) Blog 297
Arduino Mega2560 S2: Finding a new version of the Arduino package for Octave, I have to test it. Skipping 2 pages, I find have problems again. So starting from the beginning, I hope to resolve it and get it going. In vain again? Click the image to watch the video.
ESP32: Rewiring is needed and takes thinner wires. Then testing the existing cicuitry shows another pwm issue. The oscilloscope shows it's in the wiring, but how? Then finally, wiring the keypad and adding code...which gives a very big oops. But why? In the end, another rewiring is needed. Click the image to watch the video.
RaspberryPi: The next attempt to get the MAX522 DAC running: how to use 3-wire? What to use: spi-dev or spidev? After some searching I find out what's what and what to use? Also how? And it's back to Python, I guess. Click the image to watch the video.
Mirft2: Focus is first on the imaging and accu, using either GUI. The result in ImageMagick leads to another test for HSV values with an unexpected result. Then on with Blender3D to get the modelling better. Click the image to watch the video.
Mydfir: Continuing with adding timestamps to the algorithm and datalog. This reveals some tricky stuff, as well as some needed changes in the algorithm where it comes to sonar. Where to start?! Click the image to watch the video.
Arduino Yún: Getting new data for use in Octave and trying subplots this time. A recurring problem is the colour, but with subplots using a colour more than once doesn't matter. Still: something is wrong. But how come? Click the image to watch the video.
Discovery: After another (final?) modification of the frame, trying the trajectory again. Adding entries for the datalog, it becomes clear that distance and counter are not what they're supposed to be. But what next? Click the image to watch the video.
RaspberryPi2 & ROS: First, checking the GPIO via VNC on the Android tablet. Then back to the VNC on the laptop: the test works a bit faster. Then, back to C++ and why things won't compile. Click the image to watch the video.
9 November (Playlist) Blog 296
Arduino Mega2560 S2: Checking on the circuit and reading online, I find I may have to add another component. Just not sure how exactly (+ or -). Testing it I get some confusing readings on the oscilloscope until I realise I make a mistake and have to measure again. What's new? Click the image to watch the video.
Hand: Again, a total check reveals some issues leading to 2 replacements. Then, the pitch gears need a check if they do work after which the focus ends with a look at the wrist motor and yaw switch. What to do? Click the image to watch the video.
RaspberryPi: New projecy: using the MAX522 double DAC using SPI 3-wire protocol. There's still place on the breadboard, but how's the wiring? And how is it controlled? This brings a test. Click the image to watch the video.
ESP32: Connecting the keypad requires some extra wiring and here Murphy starts kicking in. Then connection follows Murphy and have to solve more than just wiring. Finally, what's again with the servomotor? Click the image to watch the video.
Mirft2: Continuing from last time: OpenCV and comparing images: how do they look now? Some oddity with very bright red, but the HSV value seems correct. Then gear cycles (rotations): what's the difference between the 2 GUI's? Finally, Blender3D modelling: finding some mistakes and missing parts. But not there yet Click the image to watch the video.
Mydfir: For the analysis of why linefollowing and sonar go wrong, it's time for timestamping. Also, the function use needs some improvements. Some oopses later, I find that time goes slow, in data. But it might show clues. Click the image to watch the video.
Arduino Yún: Starting with the voltage divider and phototransistor, I encounter more than 1 isssue: rewiring, reprogramming and a low voltage. How to solve that? Then again Octave. Newly aquired data gives a nice graph but not for all. Subplots? Click the image to watch the video.
Discovery: Another modification for the hind wheel but also one for the frame. Then testing the trajectory and what's the distance have to do with it? If any. Click the image to watch the video.
RaspberryPi2 & ROS: Trying once again to solve the Data.msg issue, leads to another oops. Then, using the Android with VNC, trying to get electronics and fischertechnik working. What's up with that? Click the image to watch the video.
BeagleBoard & rollertrack: A 2nd attempt to get the ball rolling down the track leads to a reconstruction and reinforcemet. Also, an oops in connecting but why? I'm missing some parts but have to improvise. As usual. Click the image to watch the video.
2 November (Playlist) Blog 295
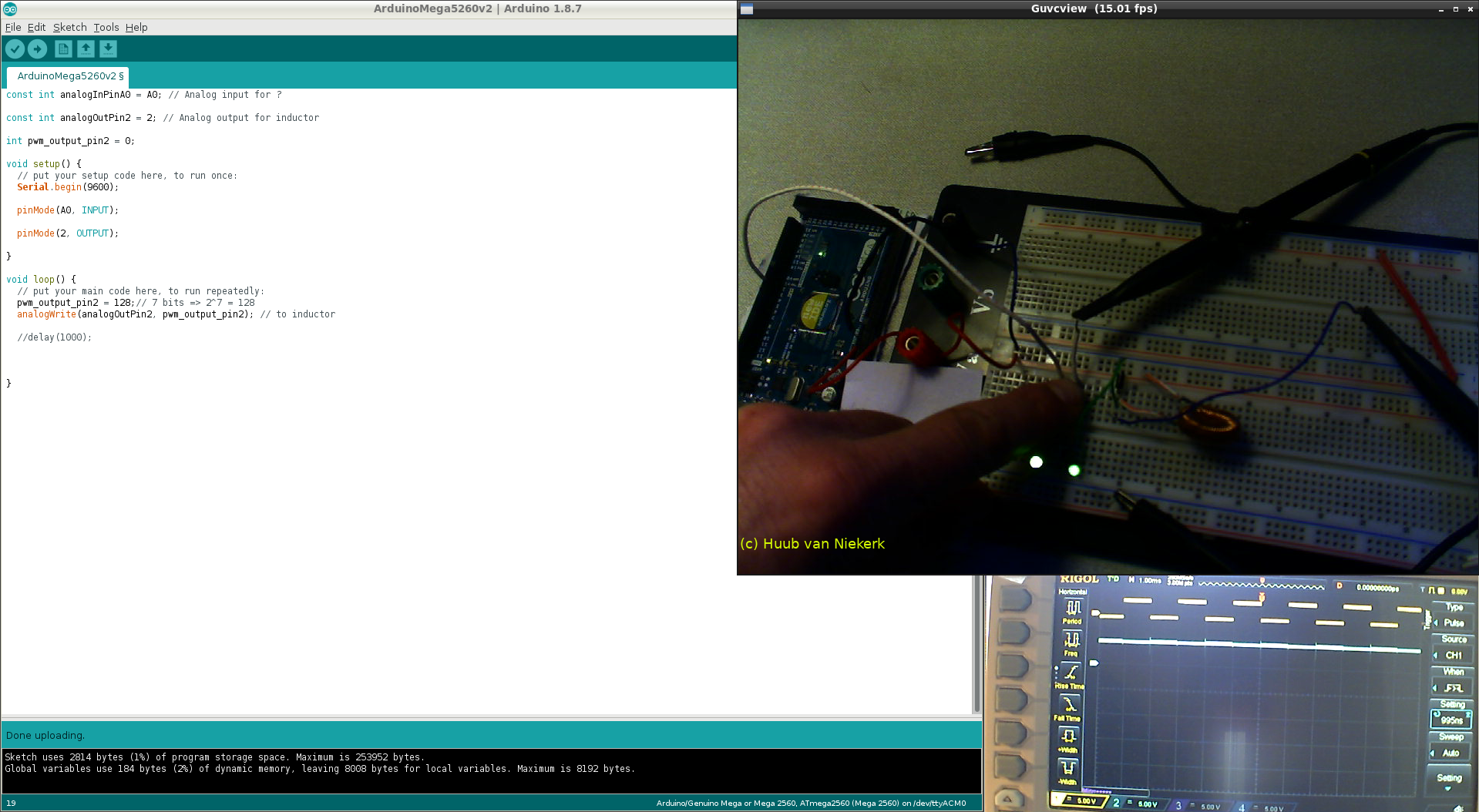
Arduino Mega2560 S2: New experiment with electronics: can I move some small object using induction. This requires a circuit, but how can I get it to work? Using gEDA, SciLab and an oscilloscope, I find some issues. Click the image to watch the video.
Hand: After transportation, the whole arm needs a checkout, because I noticed some malfunctioning. This leads to an extensive diagnose of the electrical and pneumatic part of the hand, resulting in not just a rerouting and wiring fix but also an oddity in schematics. Click the image to watch the video.
RaspberryPi: Trying to run 2 projects at the same time: SPI (Python) and I2C (ANSI C) and the VNC via Android. But something is odd. Some code needs a speed-up while a circuit needs a rewiring. Signals are vague, so what does the oscilloscope show? Click the image to watch the video.
ESP32: Again, the servomotor gives questions, but the oscillscope doesn't. How come? Then trying to add the keypad, but how? The algorithm setup seems ok, but what's with the wiring? Confusion.... Click the image to watch the video.
Mirft2: Testing the robot after exhibition, I have a oops moment to connect and find a check using ping. Then continuing the reconstruction modelling with Blender3D and comparing with the robot... Click the image to watch the video.
Mydfir: Focus is to change the algorithm to use functions, but by testing and analizing the data, even more if's are necessary. It isn't over yet. Click the image to watch the video.
Arduino Yún: First, a new attempt to get the propeller motor back to work. Then back to Octave, trying edit for getting a graph. Colours are there, but what's up? How about the markers? And the ranges? Click the image to watch the video.
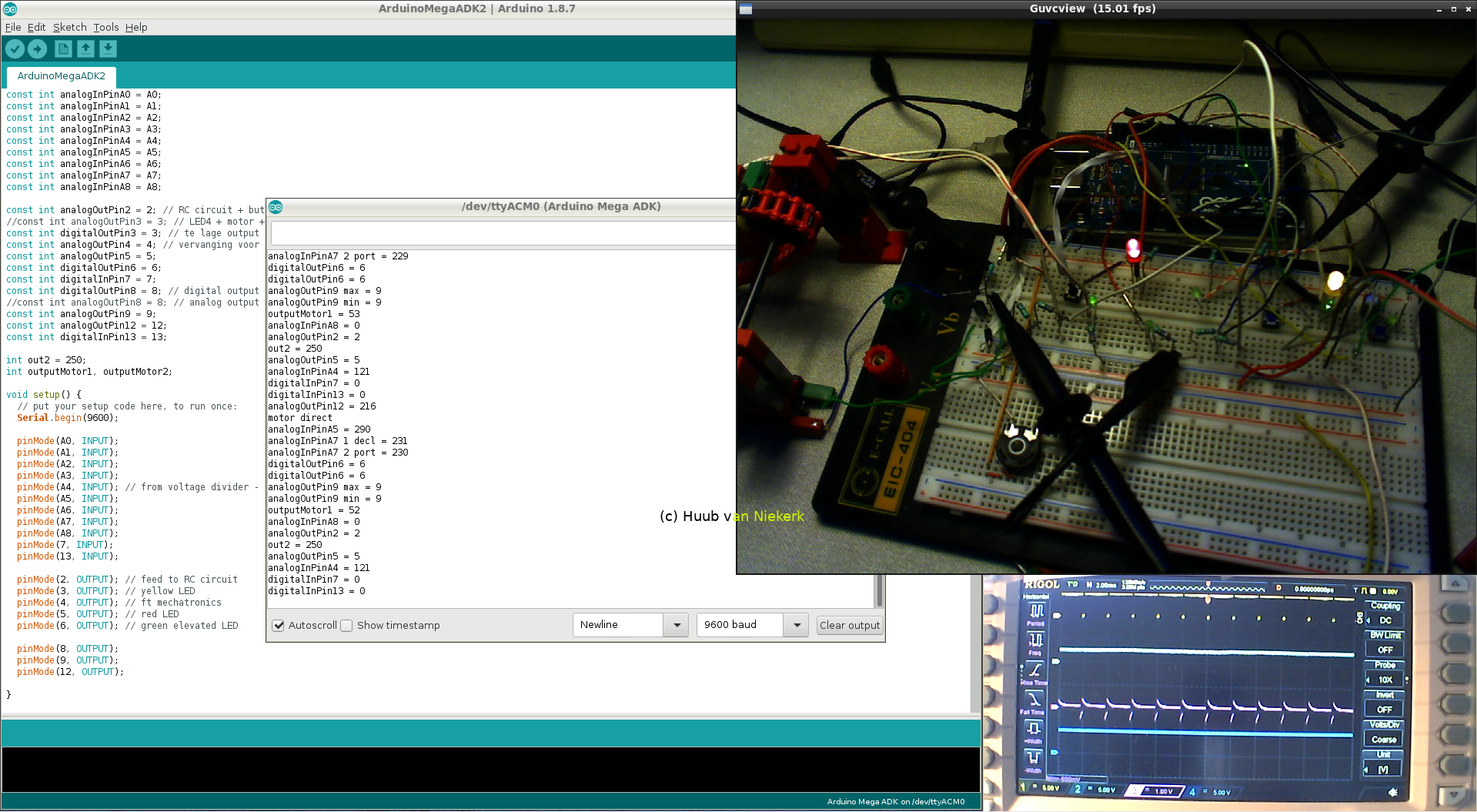
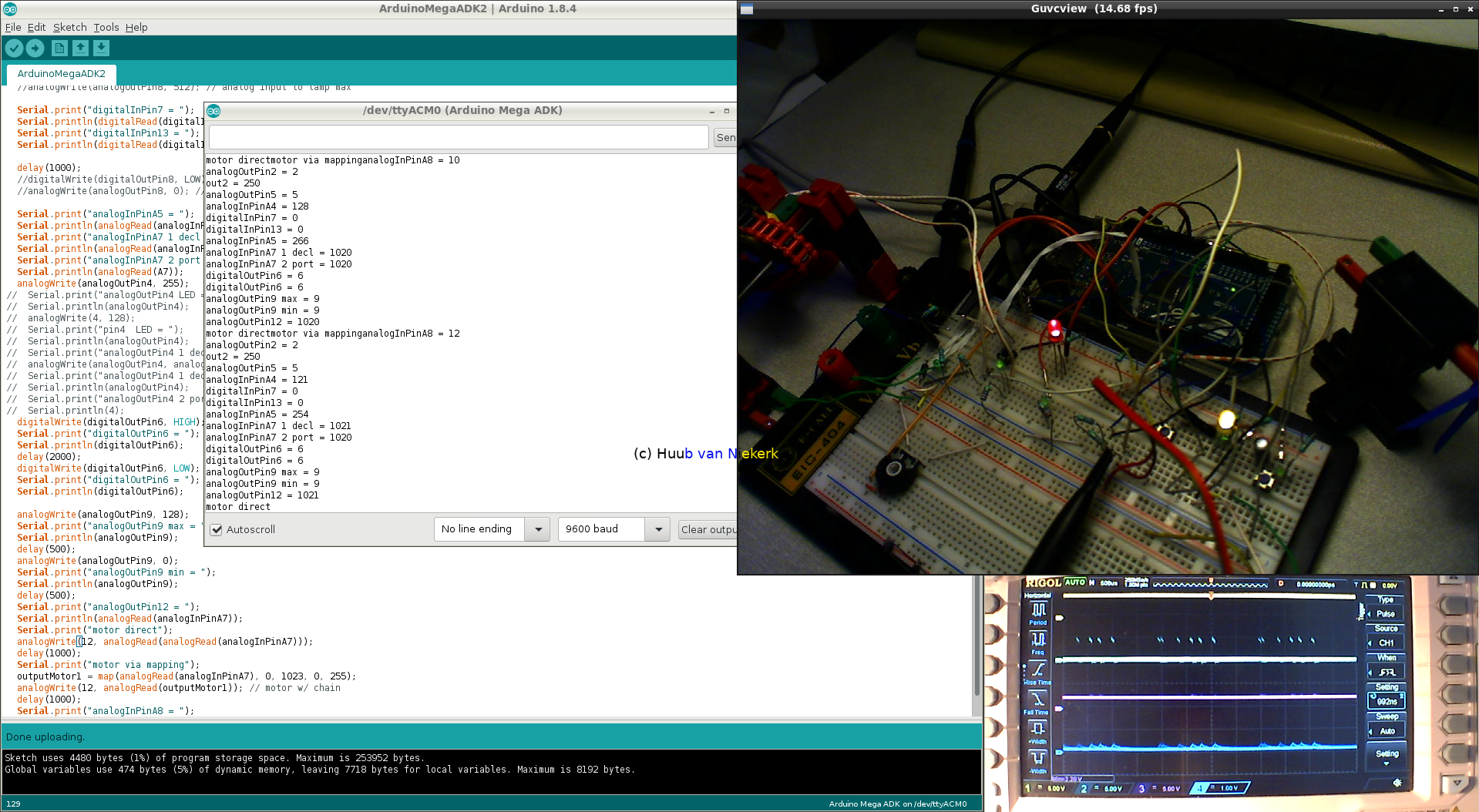
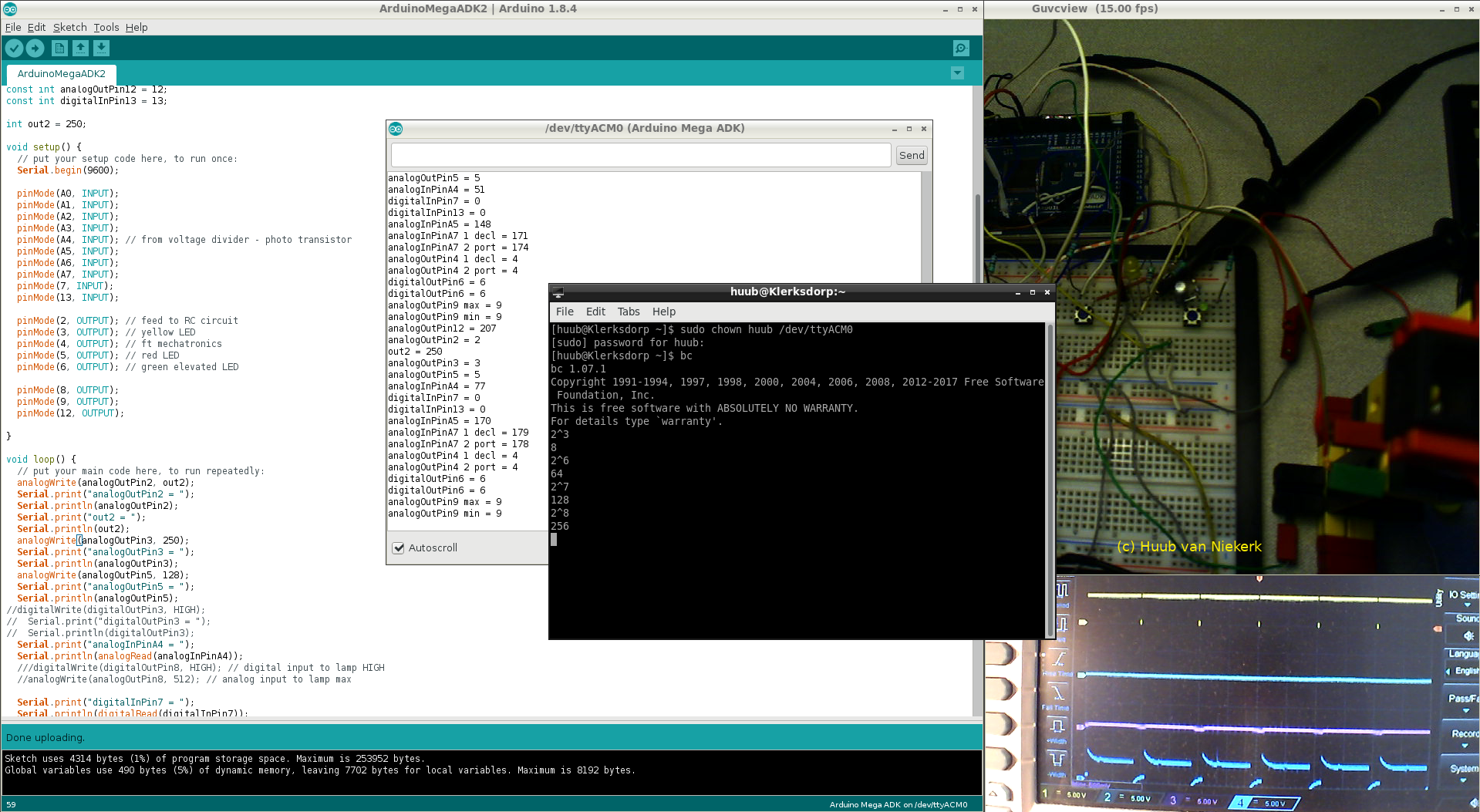
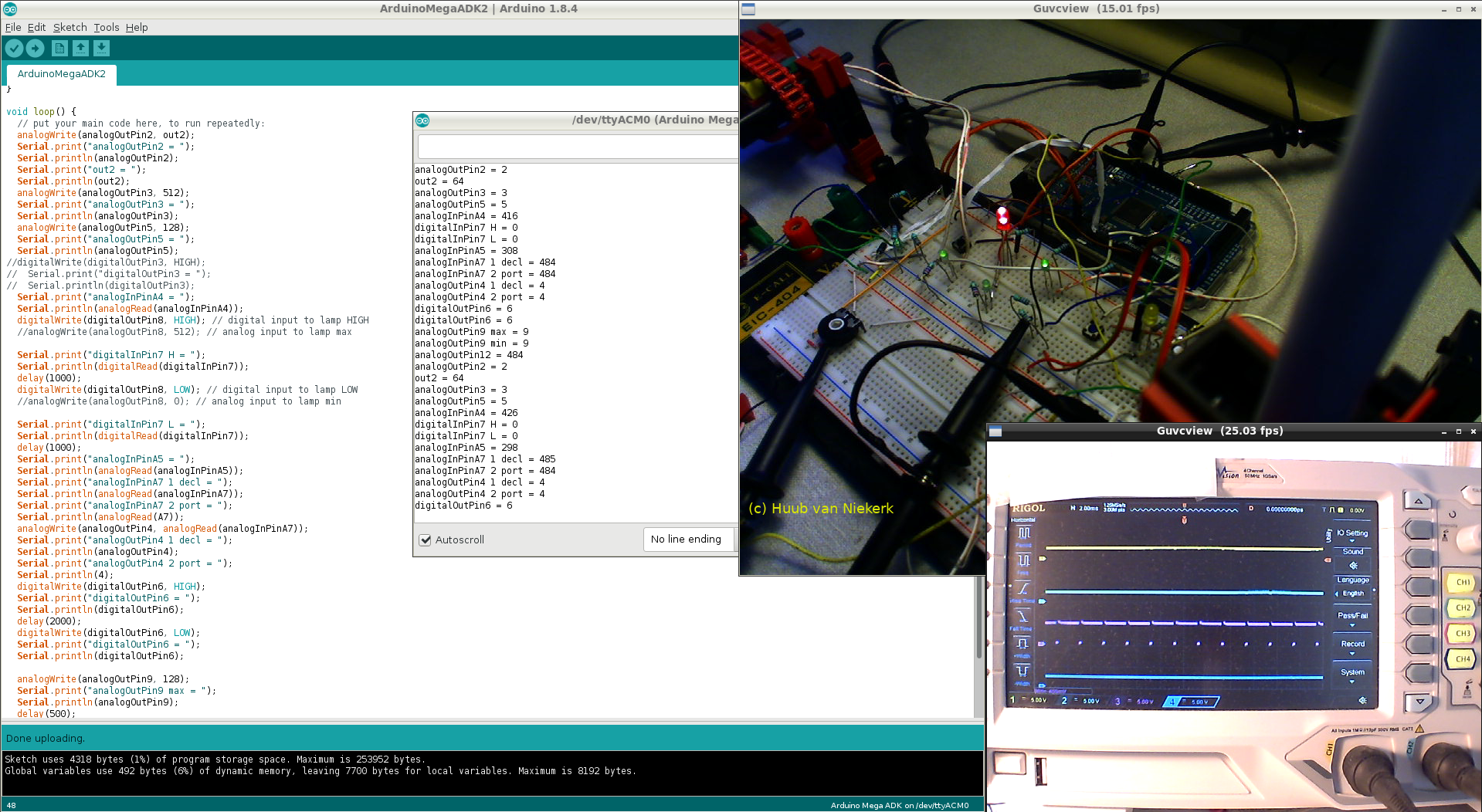
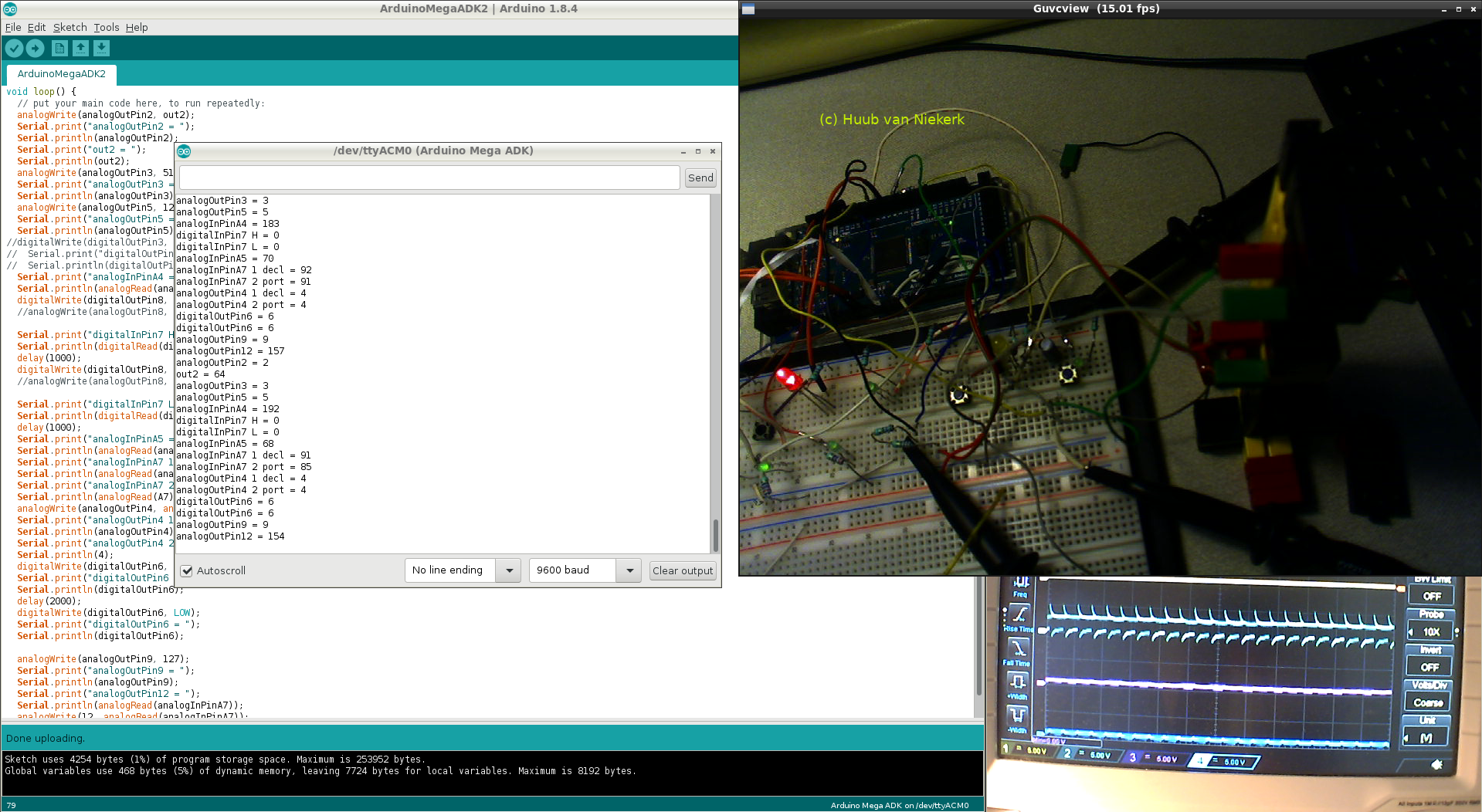
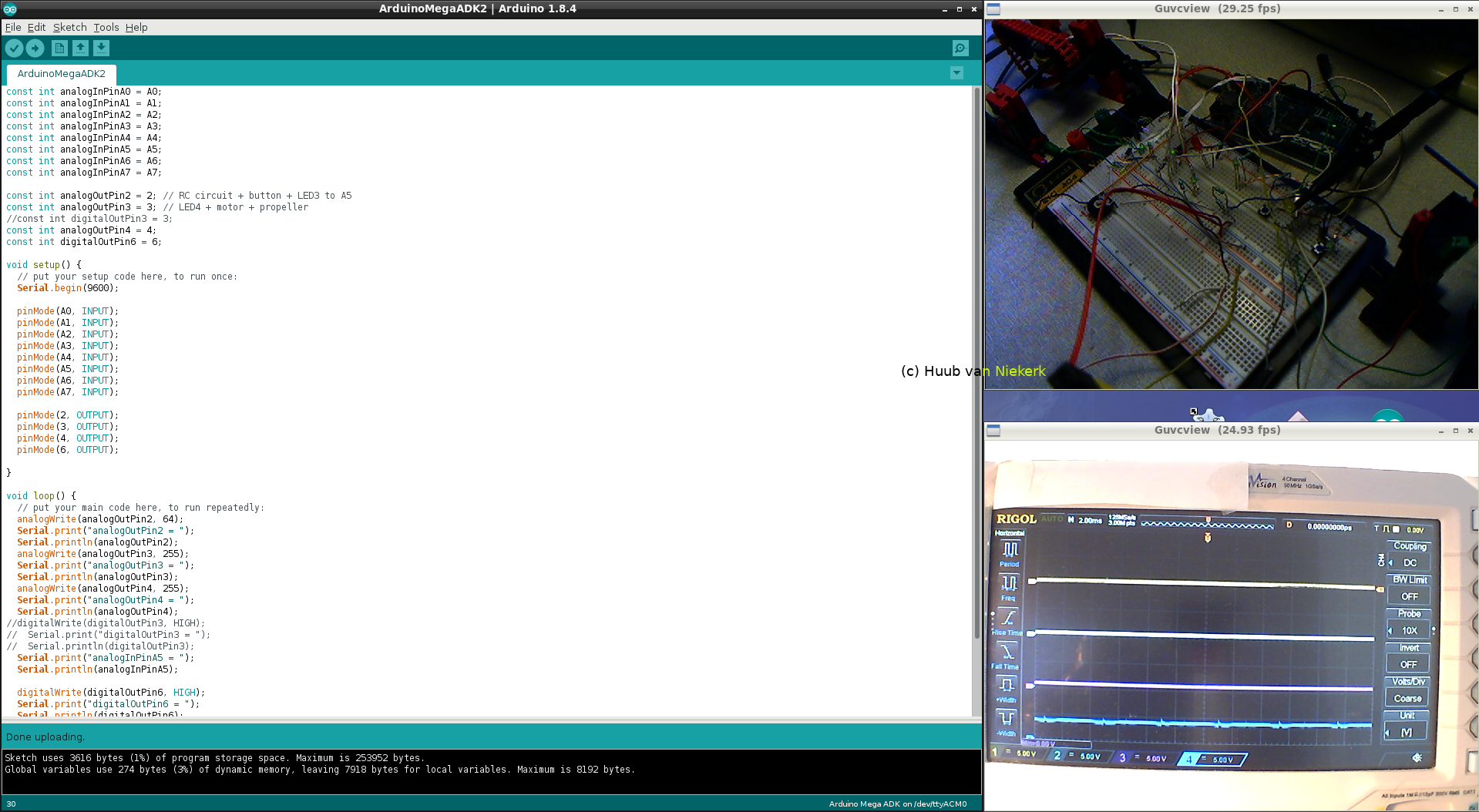
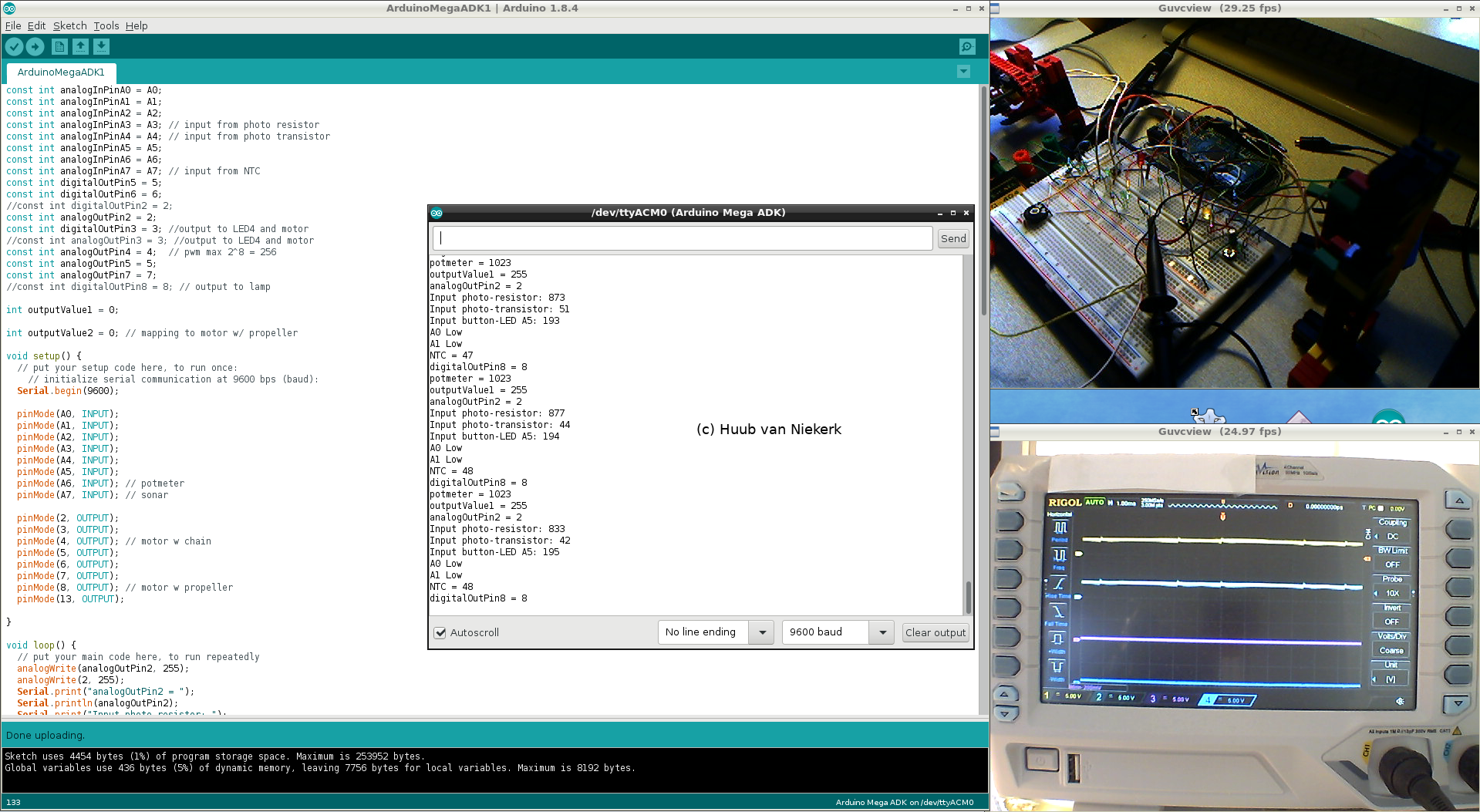
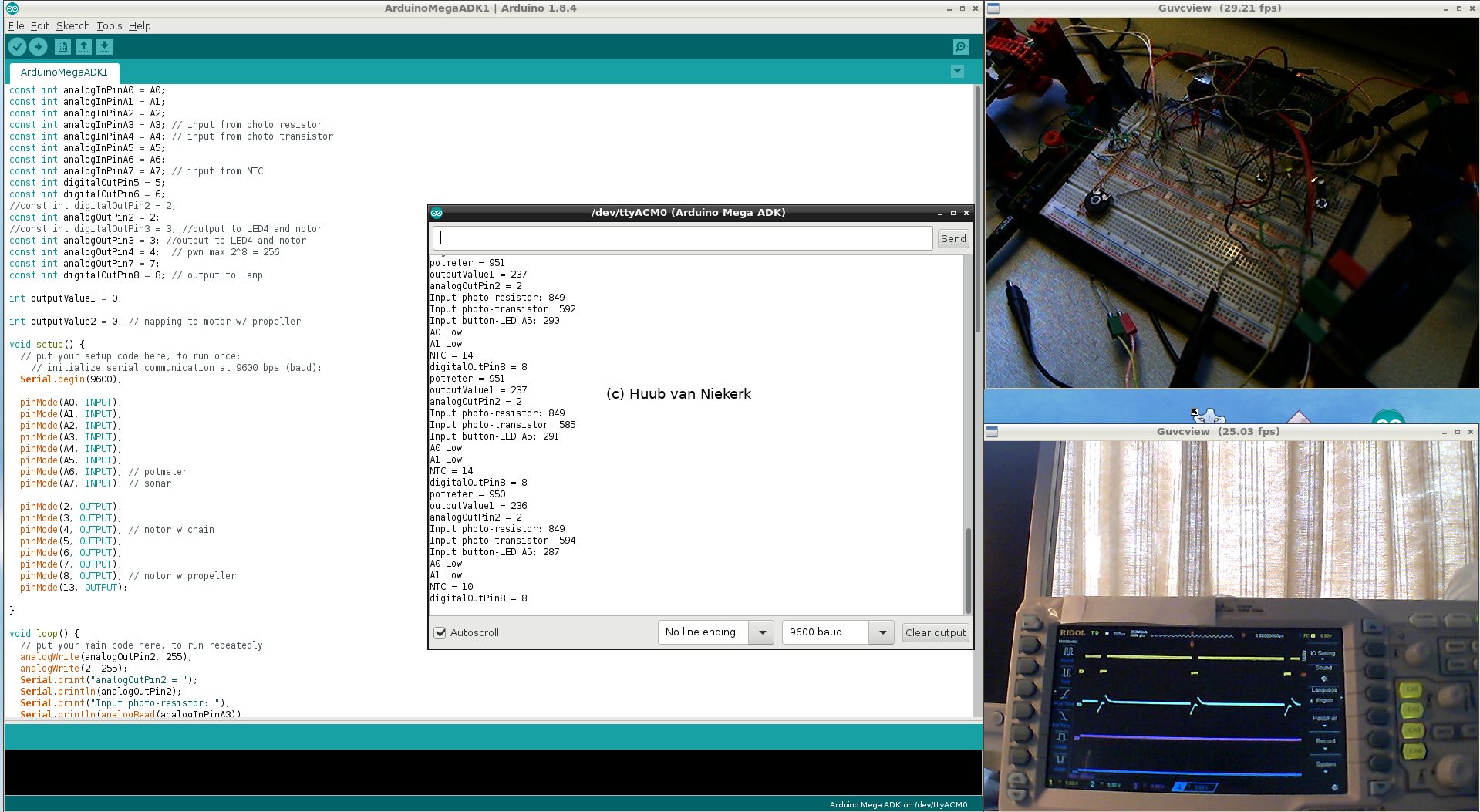
Arduino MegaADK: Final transistor test: what's wrong? Wiring? Pulsewidthmodulation signal? Wrong port? Algorithm? Hope to finally solve it, but will it? Click the image to watch the video.
Discovery: A new attempt to improve the hind wheel looks promising. Then to see how the robot drives don't go as hoped. Question is why. Some code improvements, but is there any consistency? Click the iimage to watch the video.
26 October (Playlist) Blog 294
ESP32: Starting with changing part of the algorithm from for into while, what's up with the motor? Signal? Wiring? A minor oops with the oscilloscope and introduction of the next device. Click the image to watch the video.
Hand: Starting with a test if really everything (kind of) works. With 1 exception, it does, although this worked previously. Some other improvements can be made, but for now it's ok. I think. Click the image to watch the video.
RaspberryPi: Starting with testing the I2C on the circuit, I decide to involve my Android tablet and my iPad as well. Can they connect nicely to VNC? How about the resolutions? What about the VLC stream from the raspicam? Click the image to watch the video.
Mirft2: Starting with a boot going oops, I make a GUI mistake. Then I focus on a reconstructional design using Inkscape and Blender3D. Finally, how do the images look like? Click the image to watch the video.
Mydfir: Focus is on the linefollowing: what makes it not finding the line again? A change in algorithm makes it stop now, but how to continue? A new setup in algorithm is desired. Click the image to watch the video.
Arduino Yún: Continuing with data displaying in Octave, I decide to put the commands in a .m file after which it gets clear why things go wrong. Then, I need to change the algorithm to get rid of static values..after which it oops and the time runs out (again). Click the image to watch the video.
Discovery: With another hind wheel modification, how will it go this time? Some surprises in distance, with sensors and the battery voltage. But how to explain them? ROBOPro still doesn't go, but why? Click the image to watch the video.
Arduino MegaADK: Focussing on the transistor circuit: it maybe better to replace it. But what's the result? The oscilloscope gives a clue, but not as expected. So how to go on? Click the image to watch the video.
RaspberryPi2 & ROS: Trying to solve the Data.msg problem (or is the problem something else?), using vncview on ipad & android and getting the GPIO working in Linux/bash via minicom. Click the image to watch the video.
BeagleBoard & rollertrack: First construction of a rollertrack: how should the course be? How will the motor be constructed? How high should it be? First part of the algorithm in Python. Click the image to watch the video.
19 October (Playlist) Blog 293
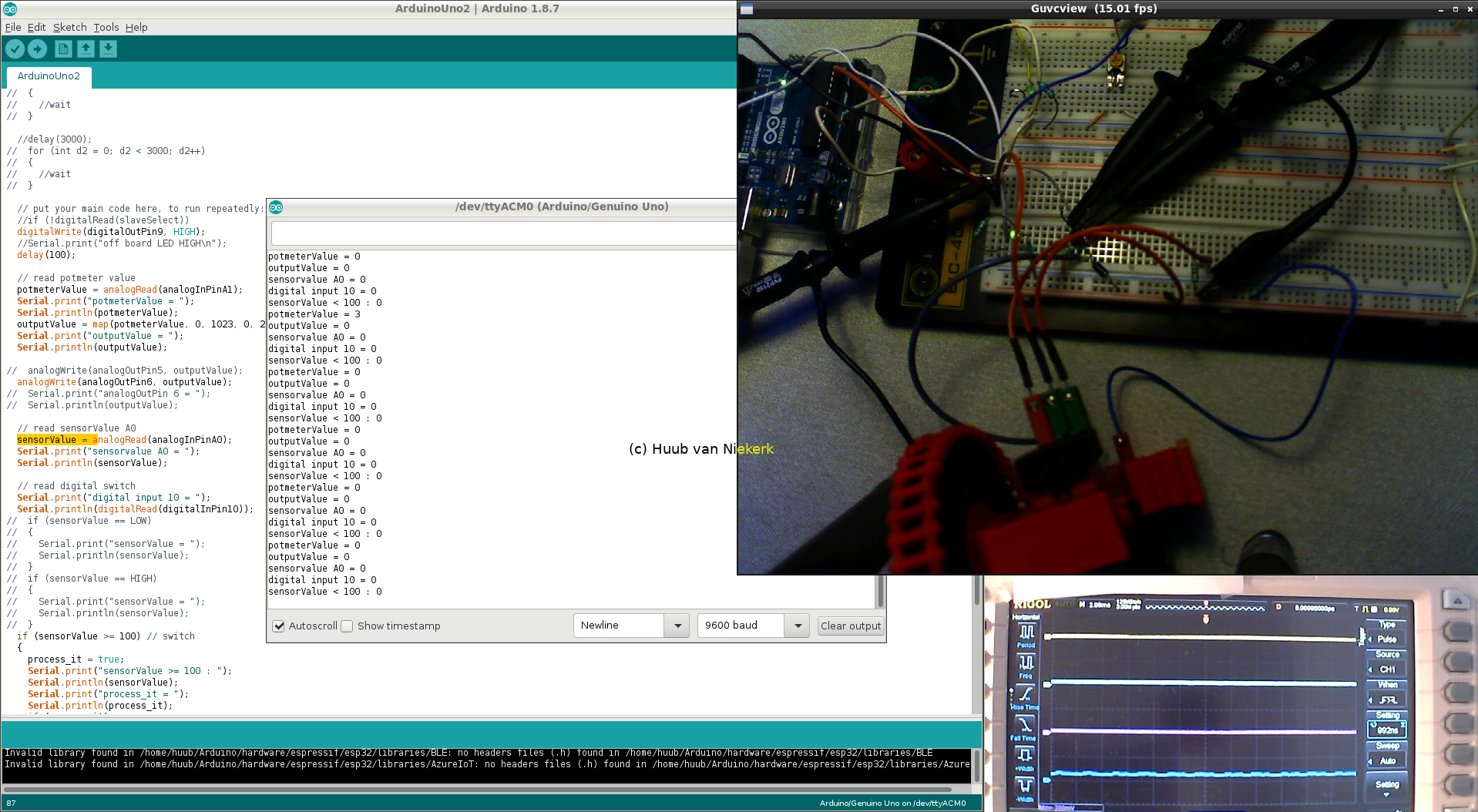
Arduino Uno: Starting with some rewiring, I need to check on the transistor circuit: what's wrong? After some testing, 2 replacements show that the type may be ok, but that the model makes a difference too. Click the image to watch the video.
Hand: Now the yaw timing is ok, can an interrupt work? Then, back to roll. A roll modification might work, and I'm in for a surprise: another yaw/roll modification is needed, but will this work? Click the image to watch the video.
RaspberryPi: Going on with the I2C counter. Now that it works, I can go to a higher number and speed up. Also: does the demo still work? If so, what's next? Click the image to watch the video.
ESP32: Starting with the LDR, is it really functioning as expected? To verify, the oscilloscope is used. Then back to the servomotor. Changing the algorithm a bit, I'm in for a surprise. Click the image to watch the video.
Mydfir: With the modified linefollower sensors, it should be easy. But this shows compilcated...why? Diagnose and algorithm checks should make sure. Click the image to watch the video.
Arduino Yún: Another go at graph in Octave, using new insights on data. Then, checking the modified chain motor, why is the signal 0 on the oscilloscope? Click the image to watch the video.
Discovery: More attempts on the sensors and turns with the cloths. But the hind wheel needs a modification. It ends up better, but I lack the real good parts. And what's with the trajectory? Click the image to watch the video.
Arduino MegaADK: Trying to correct the algorithm to get the motor with propeller working. This turns out to have more than 1 cause..oops! Will it work? Click the image to watch the video.
RaspberryPi 2 & ROS: Introducing the GPIOClass from an old project to get the breadboard working in C++. After getting things ready to start, compilation follows with an unexpected result. A deja-vu? Click the image to watch the video.
BeagleBoard & monorail: Final attempt to get things working. Is 1 motor indeed running faster? Are the distances between sensor and motor ok? Click the image to watch the video.
12 October (Playlist) Blog 292
Arduino Mega2560: A (last) attempt to find out why chain motor 1 doesn't run. Voltage? Output mapping? Wiring? Electronics? Finally I find the cause, but do I have the solution? Click the image to watch the video.
Hand: Focus is on the yaw timing and direction and on the pitch gears. After some minor changes I decide for a radical change in the algorithm which seems to work out. After a correction on the gears, the pitch also seems the work again. Click the image to watch the video.
RaspberryPi: Focus is on the new sequence of the algorithm...just a small issue with the status. Then a delay difference to solve. Also: what's with the VLC videostream? How is an iPad involved? Click the image to watch the video.
Arduino Uno: Trying to regulate the mechatronics speed, but instead meeting with several oopses. In the end, it seems to work though. Click the image to watch the video.
ESP32: First focus is on the servomotor: will it run the backwards loop? Next adding an LDR with resistor: does it work? Then an oops...what has happened? How to fix it? Click the image to watch the video.
Mydfir: Testing the latest modification reveals it's not over yet. But why? Testing another part of the track/line shows the second sensor has to be modified as well. But will it be over then? Click the image to watch the video.
Arduino Yún: First focus is on the electronics: do the RC circuits actually work? The oscillscope reveals the answer and a replacement shows it. Then, it's time to finally solve the chain problem with the lamp. And yes, an attempt to fix Octave stuff ends in time. Click the image to watch the video.
Discovery: Trying of using a cloth has better results, I find that things can go wrong in other ways as well. So what's the solution, if any? Click the image to watch the video.
Arduino MegaADK: Last time I put the motor w/ propeller back in its place, but why does it only run at reset? Will an algorithm change help? What about using minicom? Click the image to watch the video.
RaspberryPi2 & ROS: After boot, there's a connection issue with minicom. Then, setting things up, there's still no GPIO. Since this is C++, how to do it? Time for a deja-vu. Click the image to watch the video.
BeagleBoard & monorail: Continuing with testing the pulley system, things seems to be off: motor, wire, speed? Something in the screen output is not what it should be either. What's up? Click the image to watch the video.
5 October (Playlist)
Mega2560: Trying to get the switches interrupt the motors w/ propellers. First, the algorithm has to match the wiring. Then, the hit has to match the timing. And what's with the pulsewidthmodulation signal on the oscilloscope? Click the image to watch the video.
ESP32: Focus is on the serrvomotor again: after an oops at start, reading the signal on the oscillscope, the question is what is actually happening during the control. Also, why is come part of the algorithm apparently not executed? Click the image to watch the video.
Hand: Trying to solve the yaw mechanism, I find that the Timer function may cause a problem rather than solve it. Also, the pitch gears have a problem. Oops. Click the image to watch the video.
RaspberryPi: The algorithm gets a change to work with the switch but the I2C wiring is weak. Another change is status: when is what. Click the image to watch the video.
Mydfir: Once again, the line following is tested, and with some light and brightness differences it goes very wrong. Until I find out what's the cause in 1 case. The fix is a modification. Click the image to watch the video.
Arduino Yún: Focus starts again on data aquisition, but after that: how to get the data into a nice graph in Octave. For this, I have to delve into the Octave language. Click the image to watch the video.
Discovery: Again, trying to analyze the driving and speed without a camera. This leads to some surprising results after which the algorithm needs a change. Click the image to watch the video.
Arduino MegaADK: Trying to add the motor back to the circuit, as well as the NTC. Should I change the way the chain motor is driven? What's the result? Some surprise comes along. Click the image to watch the video.
BeagleBoard & monorail: First testing for the lamps and detection. Then with the carriage, pulleys and algorithm. Some big oopses, but it seems to finally run. Is this the end or not? Click the image to watch the video.
28 September (Playlist)
Arduino Mega2560: First focus is on the rewiring of a switch: the signal doesn't end up where it should. Then: while checking out the propeller motors, a big power oops. I manage to fix it, and get the motors to work, but not how it should. One motor remains still...but what to do? Click the image to watch the video.
Hand: So, why is the off function not called properly? Some new timer tests reveal that it does work..kind of. And something else goes quite wrong, but why? Click the image to watch the video.
RaspberryPi: Continuing with the binary counter, I need to expand it to see what exactly happens. Adding some delay, I finally realize why it doesn't work according to plan. A quick fix resolves it, but it's not the end. Click the image to watch the video.
Arduino Uno: So if the motor works, what's with the signal? With the oscilloscope, the cause is quickly found. But what's the solution? Again, timing plays a part as well. Click the image to watch the view.
ESP32: Focus is on the servomotor. Why doesn't it run as intended? Solving a wiring issue and looking into the github info, clarifies some, but not all. But it does work... Click the image to watch the video.
Mydfir: With the idea to follow a curve and then detect an object, it doesn't go according to plan. After finding out why, I also had to add checks in the software. In the end, another oops happens. Oh well. Click the image to watch the video.
Arduino Yún: Now the data is mostly ok, how about the graph in Octave? When I realize why there aren't 4 lines, can I do something about it? And how? In the algorithm or in Octave? Click the image to watch the video.
Discovery: For the time being no camera because it's not tested against the latest firmware. Ouch. So how do sonar and sensors deliver? Some surprises and oopses. Click the image to watch the video.
Arduino MegaADK: Again, focus on the LED and RC-circuit. Trying out with values I find what's wrong...which turns out to be a deja-vu. Then, the RC circuit...the oscilloscope shows nice signals, but what's up really? Click the image to watch the video.
21 September (Playlist)
Hand: A viewer suggests that it should be Timer.start() instead of Timer.start. So new attempts to get the algorithm right. What will work? Ar the (milli)seconds correct? What about the variables? Click the image to watch the video.
RaspberryPi: Again, the wiring power oops. But why? The I2C signal is good. Then a idea pops up to check the LEDs and change the algorithm a bit. After which a surprise happens. Click the image to watch the video.
ESP32: First: checkout 7 segment display and LCD. Something not quite ok, but not serious. New topic: servo-motor. How to connect? How to program? Which library to use? Examples all show differences.Will it work in the end? Click the image to watch the video.
Mydfir: Continuing with the objects, I find the cause of the error and manage to quickly fix it. Then, the line following goes nice, but the detection of the objects goes different than expected. Big oops, but why? Click the image to watch the video.
Arduino Yún: Focus again on the contents of the array, I find some nice results but also numbers that shouldn't be there. I realize what happens to variables that are not initialized. In Octave, I have to find a way to show the array rows correctly. Click the image to watch the video.
Discovery: Focussing on OpenCV, I have to verify the HSV values. Then some attempts to driving and taking pictures. How does it work out? Will another go work out? Click the image to watch the video.
Arduino MegaADK: After checking the setup, I focus on the LED next to the RC circuit. What's wrong? Adapting the algorithm, replacing LED? Click the image to watch the video.
BeagleBoard & monorail: Trying to figure out how to pulley will work and finding more than 1 issue: lamp with wiring, confusion in Python, something with a motor. Click the image to watch the video.
14 September (Playlist)
Arduino Mega2560: Checking wiring and electronics using the oscilloscope, also adding to the algorithm. Finally, I find the reason a switch isn't giving the expected signal. But how to improve timing? Click the image to watch the video.
Arduino Uno: With the Uno stand-alone now, the question is if everything will work. After quite a few tests, monitoring, checking wires and analysis, I realize I forgot to do something crucial. After solving this, things work. Kind of. Click the image to watch the video.
Hand: Focus again on the timing and timer: can I do milliseconds? What effect does it have? Are all called functions executed? Some surprises and an oops. Click the image to watch the video.
RaspberryPi: Focus on the 2nd part of the algorithm, something is odd. Some changes in the code reveals a thinking mistake. But how to solve it? Click the image to watch the video.
Mirft2: Starting with an unexpected power issue, I focus on the HSV colourspace. Using an online converter, I find oddities as well as some inconsistencies. But why? And how? Click the image to watch the video.
ESP32: Continuing with the 7 segment display, I finally find a solution, that I also have to adapt: there appear to be several ESP32 versions with different pin#. Apart from that, the LCD goes weird, but why? Click the image to watch the video.
Mydfir: Focus again on the object and the direction backwards: what's happening? Changing the algorithm in the end ends with an unexpected detection error. Click the image to watch the video.
Arduino Yún: Continuing with the data array, I find that some electronics behaves odd. To see more of that, I change the arraysize and add content. This shows the full scale and makes me see (rather) clearly what is what. In Octave I read some nice stuff but all is as expected. Click the image to watch the video.
Discovery: During preparations, I have to restore network settings (next time I'll record it). Then: checking the speed and decide to change it..with nice and not so nice results. Click the image to watch the video.
Arduino MegaADK: Starting with the RC circuit: what's wrong with it? Checking signals and values and varying the ligthing I realize the results are different than I should have expected. With this knowledge, why does another LED not work? Click the image to watch the video.
RaspberryPi2 & ROS: Fixing a typo which keeps the subscriber to run ok, then try to find out why the compiler doesn't find the message. I really need a headerfile. Click the image to watch the video.
BeagleBoard & monorail: Checking for the 2nd modification, it seems not easily feasible. Back to running my code, a lamp doesn't work so what's up? Next: direction of the motors. How to really control and something with stickyness. Ouch. Click the image to watch the video.
7 September (Playlist)
Arduino Mega2560: Focus again on the chain motors: why does 1 not run? Then a propeller motor: program it and run? Finally, does Octave detect the board? Click the image to watch the video.
Hand: Focus again on the algorithm. After changing the argument content, why does the motor run for more than 2 seconds? I need to measure time, but how? Click the image to watch the video.
RaspberryPi: Using I2C, how can I read a switch and control LEDs? With a little modifications, the fischertechnik LEDs are better visible, but changing the algorithm takes more than initially thought. Click the image to watch the video.
Mirft2: Focus is first on OpenCV, since I don't like the way HSV is handling red. Does it have to do with distance? After that, some gear cycle testing again. Any changes? Click the image to watch the video.
ESP32: Continuing with the I2C LCD: are the compile errors because of a library error? What about scrolling text? How about timing? What about a 7 segment display? Click the image to watch the video.
Mydfir: Back to sonar: how does the robot respond to close-by objects? Where does it go to and how? This leads to a change in the algorithm, but will it work? Click the image to watch the video.
Arduino Yún: Checking the button values, I change the [x, 0] values. But why is 1 not visible in the console? Arraysize, or ? Then Octave: graph and arduino. Click the image to watch the video.
Discovery: Power up the controller: check?! Setting the date and time, check?! Driving a distance: check?! Change the algorithm: check?! How long does the accu last: oops?! Imagemagick: red colour: check?! Click the image to watch the video.
Arduino MegaADK: Trying to get the values of the fischertechnik phototransistor detected correctly. But what's the problem? Measuring and rewiring gives a surprising answer which leads to a change. Click the image to watch the video.
RaspberryPi2 & ROS: Part 2 of the C++ restart. Trying to get a publisher and subscriber to work, but this not easy because I'm using different names. After correcting a typo after compilation error, it works. Kind of. Click the image to watch the video.
BeagleBoard & monorail: Reconstruction and modification should make the transport better. But then: what's the 2nd motor doing? What direction? What's the best speed? Click the image to watch the video.
31 August
Arduino Mega2560: Trying to get the chain motors working again, I test the motor and find a mistake in the code. But does this solve it? Also another attempt with Octave. Click the image to watch the video.
Hand: Focus is again on the algorithm of yaw. What's wrong with the motor direction? Analysis and trying of the code slowly brings a solution forward. But will this solve it all? Click the image to watch the video.
RaspberryPi: Focus on the wiringpi/gpio combination, I first have (again) to restore power somehow. Then an analysis of the algorithm leads to a working switch. But then oops again? Click the image to watch the video.
ESP32: Again: connecting the LCD. Checking the GPIO leads to rewiring: CMD isn't GND! Finally I find the correct I2C address. More rewiringfor clarity and then the algorithm: what's up? Some oopses. Click the image to watch the video.
Arduino Yún: Trying to capture the button data again, I find that the array isn't optimal. Apart from that, the datalog still doesn't make much sense. Apart from a nice graph in Octave, what more can be done? Click the image to watch the video.
Discovery: Starting with a power problem, I try to set the date manually. This appears to work with a password I didn't expect. Then the speed comes with a big surprise..but how come? The algorithm didn't change. Checking with ROBOPro gives a surprise as well. How to go on? Click the image to watch the video.
Arduino MegaADK: Reconstruction of the pole with phototransistor, with odd result. What's with the trasistor circuit? And the RC circuit? Another test with Octave. Click the image to watch the video.
RaspberryPi2 & ROS: Removing all previous packages, including the Python version, I start all over. And find I probably forgot some settings in the past. But does this mean it will work now? Click the image to watch the video.
BeagleBoard & monorail: Continuing with the new carriage and motors: it needs rewiring, winches set up. Testing shows I need to connect the 2nd motor to the controller, but how? Also, the algorithm needs a change. Click the image to watch the video.
24 August
Arduino Mega2560: Focus on why the motors don't work: so checking wiring, signals, gEDA. Unraveling some mistakes and an oops. But also unanswered questions. Click the image to watch the video.
Hand: Focus is on the Timer([]) function again: how will another suggestion work out? Some oops, rework or nice? No errors, but a strange message gives a clue. But how to solve it? Click the image to watch the video.
RaspberryPi: Again focus on I2C, the new attempt is to get the switch working with wiringpi. Will pigpio library work? The gcc command has to be changed, but will it work or go oops? Click the image to watch the video.
Mirft2: Starting with powerup, it goes wrong. But why? Then the focus is on OpenCV: what do I notice? What distance? Another subject: speed. ROBOPro shows a maximum value lower than mine. Click the image to watch the video.
ESP32: First, why does after power-up the LED not work? Then: connecting the LCD display. Requiring a driver, and additional wiring. But what's the error? And what's the # of I2C devices? Click the image to watch the video.
Arduino Yún: Focus is on the buttons (switches) again: why the odd values instead of boolean. Studying the algorithm again and finding an oops. After some changes, will this work? Click the image to watch the video.
Discovery: After modifying the hind wheel, it's time to test again. This leads to adding a distance to the algorithm. But things keeps going wrong so check with ROBOPro, finding an oops. What does OpenCV do this time? Click the image to watch the video.
MegaADK: Focus is on a disconnected LED: reconnect it and how to led it work? 8 bits or 7? Analog or digital? Then something on the mechatronics: what's with the wiring and signal? Some oops. Click the image to watch the video.
RaspberryPi2 & ROS: New attempts to get the message working by settings. new package, path. In the end, would Python still work and control the fischertechnik? Click the image to watch the video.
BeagleBoard & monorail: After a last short test with the carriage, I replace it with a whole new one which requires at least 1 other motor. But how will it go? Just trying out... Click the image to watch the video.
17 August
Mega2560: Trying to get the 2nd potmeter workng leads to the finding of a long-lasting wiring issue. But will it work after solving it? Introduction of Arduino for Octave: does it work? Click the image to watch the video.
Hand: Continuing with the difference between time.sleep() and threading.Timer()...ending with an oops and a big question. Then a test: what's the difference between the hand, yaw in combination with the pitch? Click the image to watch the video.
RaspberryPi: After solving the wiring problem and the LEDs work again, the changed demo algorithm can finally be tested. How about the wiring algorithm? Click the image to watch the video.
Mirft2: Starting with a connection problem and power oops, what's with the distance and counter? The manual reveals the actual meaning of commands, but even then the results don't really match with expectations. What would a change to the algorithm do? This reveals another oddity, or not? Finally, OpenCV shows again some strange things. Click the image to watch the video.
ESP32: Trying to connect to the device, I find what causes the error and fix it. Then, why doesn't the LED work? This has an unexpected solution. Further plans await using git. Click the image to watch the video.
Arduino Yún: Focus again on the button that should pose a motor. What's with the values? Does changing the declaration help? Setting the potmeters do, but what else? Click the image to watch the video.
Discovery: Reconstruction of the hind wheel is needed, but will it work nicely? Then more tests on the sonar, leading to a surprising oops in the algorithm. How to deal with that? And OpenCV has some doubtful results. Click the image to watch the video.
Arduino MegaADK: Trying this time to reconnect the lenselamp to signal the phototransistor. But it's nog really going according to idea. So what's wrong, if anything? Algorithm? Voltage? Wiring? Click the image to watch the video.
RaspberryPi2 & ROS: With minicom on the correct serial port again, can I solve some of the problems and mysteries involved with the package, headerfile etc? Click the image to watch the video.
BeagleBoard & monorail: After doing the planned reconstruction, I find another problem. Cause: an earlier modification, which has to be undone. Oops. But will it work? Or is a pulley the next experiment? Click the image to watch the video.
10 August
Arduino Mega2560: Time to rewire a potmeter and check for value. Then connect a motor with chain..after which I'm in for a surprise. Apart from that, there's some odd behaviour. Click the image to watch the video.
Hand: Using a viewer's suggestion to improve the algorithm, I find that I need to adjust it. But I run into problems, so what's up? Next time better luck? Click the image to watch the video.
RaspberryPi: After a successful rewire and recode for the switch, will I2C finally work on the LEDs? A big oops, again. But why? Will a powercycle help or not? What with the oscilloscope signal? Click the image to watch the video.
Mirft2: Trying to connect: what's in it this time? Then, after a first run, how are the images? And how are the cycles at 4000 and 2000? Is there a pattern? Also, an algorithm change. Click the image to watch the video.
ESP32: Continuing from last time: how to connect? How to program? What's with menuconfig? Compilation for what? Some wiring, but will or would it work? Click the image to watch the video.
Arduino Yún: Intending to create a graph, I find that the problems with the buttons is larger than I thought. The code isn't entirely correct, but how about the values? Click the image to watch the video.
Discovery: No modification, but trying to cover some distance and analyse the algorithm. Neither look good so, apart from some usual errors, what does what again? Click the image to watch the video.
Arduino MegaADK: Starting with the mechatronics, I decide to check the voltage divider and phototransistor. What's with the values? After some change, it looks like working...using a flashlight. Click the image to watch the video.
RaspberryPi2 & ROS: Trying to get messages working but meeting with several (unexpected) issues. After recording, minicom turns out to connect to the wrong terminal: 1 instead of the usual 0. And the HDMI monitor stays black. But why?! Click the image to watch the video.
BeagleBoard & monorail: Checking the signal (or lack thereof) and the carriage. It needs a change in wiring but also something else. Because this aint working. I need a plan. Click the image to watch the video.
3 August
Arduino Mega2560: Is the power restored, then why is the signal as it is? Time to make a decision: back to 0 and see what happens. Click the image to watch the video.
Hand: What's with the arm and hand, again? Time for analysis and full demo. Any new insights? Click the image to watch the video.
RaspberryPi: Focus again on I2C: getting the GPIO to work. After finding what is correct, what's with the wiring? Then how about the algorithm? Click the image to watch the video.
Mirft2: After some power issues with a freshly charged battery, I do some cycle tests again which go stranger by the time...until I'm just too late to do something. And that's not the only worry: why do images go from bad to worse? Click the image to watch the video.
ESP32: Time to explore further. How to connect: USB, TTL? 5V, 3,3V? Finding a nice website isn't easy, but once done it turns to github and Arduino?! Click the image to watch the video.
Arduino Yún: Again: data aquistion and Octave, Scilab. Where are the button that were fixed in the array? What's the numbers in Scilab? Click the image to watch the video.
Discovery: Reconstruction of the wheels leads to what? Larger distance? High speed? At which distance? And then those *** network errors. Click the image to watch the video.
Arduino MegaADK: Checking on wiring and code: what's up? Some weird stuff on the oscilloscope and finally some idea. Still:starting from scratch is an option.. Click the image to watch the video.
RaspberryPi2 & ROS: Trying to start roscore again, I again need to set ROS_IP. But I need something else that belongs in the hosts file. Does it work? Can I go on with messages? How do these work again in C++? Click the image to watch the video.
BeagleBoard & monorail: Once again, modifications to see if they solve the moving issues. Once again, some differences between diagnose and algorithm. Click the image to watch the video.
27 July
Arduino Mega2560: Trying to analyse the pulsewidthmodulation, I encounter serious issues. First, the Mega2560 doesn't even power up. Then, when it does using the A/C adapter, things go wrong again. Click the image to watch the video.
RaspberryPi: Trying to get the switch for I2C direction to work by rewiring and relocating the LED. So wire fixing is needed but also: does the LED work? Does the new output work? Click the image to watch the video.
Mirft2: Facing another connection issue. Then, checking cycles with indefinite distance and images using OpenCV & HSV. Which leads to a comparison of algorithm. But will it show a soluton? Click the image to watch the video.
ESP32: Introduction to the Espressif ESP32 embedded board: unpacking, checking packinglist and trying to put a breadboard together in which the ESP32 can fit. Click the image to watch the video.

Arduino Yún: Again, trying to get nice data from the circuits into Scilab and Octave. Deciding to split some data over multiple arraycells but what's the result? Does the propeller motor run? Click the image to watch the video.
Discovery: After a new round of testing, it's time to replace the hind-wheels. This turns out to go further than thought, but will it work? Image seem to look good. Click the image to watch the video.
Arduino MegaADK: Conituing from last time: what's up with the LED and motor? And the mechatronics stops but why? After checking gEDA and some more attempts with the switch, what to do? Where to go? Click the image to watch the video.
RaspberryPi2 & ROS: Going on from the success from last time, a first test to repeat it ends in an oops. Checking several options and not giving up, what's up? Click the image to watch the video.
BeagleBoard & monorail: Starting with another reconstruction: what will the result be? Some analysis should bring light, but does it? A problem in the end is solved after recording. Click the image to watch the video.
20 July
Arduino Mega2560: After last time, the plan is to test further. But something is off. Time to search for clues on why. Click the image to watch the video.
RaspberryPi: Once again: I2C. Using gcc and trying piscope, the problem is with pigpiod. So a solution is simple. Then after a code change: is 12 a pin# or gpio#? Will another LED solve the question? Click the image to watch the video.
Mirft2: Starting with another connection issue, testing with txtcamdroid app and back to the community firmware. I have to change to an a/c adaptor..and then using the scaffold trying to measure cycles from the counter/distance and putting them into a spreadsheet. Also what does HSV do? Yellow or red? Click the image to watch the video.
Arduino Yún: Aftert testing the circuit again, it's time to try Octave and Scilab again. And realizing I make an element(ary) mistake, I manage to get a nice graph. Click the image to watch the video.
Discovery: How does it run on cloth, and why? Apart from a few errors, how does OpenCV do? Some ideas for improvement, but how will they work out? Click the image to watch the video.
Arduino MegaADK: Once again: potmeter, mechatronics but also changing ports and a switch. Still more questions than answers. Click the image to watch the video.
RaspberryPi2 & ROS: Checking first on roscore: is ROS_IP still needed? Then checking out the subscriber. After changing some details, will it work? Click the image to watch the video.
BeagleBoard & monorail: Time to reconstruct the monorail setup and put it at the centre. How will this end up? After some testing and correcting, it's eminent that some more is needed. Click the image to watch the video.
13 July
Arduino Mega2560: Checking on the differences between the motors: what's the signal and what's the timing? What's the role of I2C in this? Click the image to watch the video.
Hand: Focus on the yaw, so the pivot motor wired off. Hand control for the yaw switch, I notice some oddities with the yaw motor vs. the vertical gears. How about with the hand vs yaw? Click the image to watch the video.
RaspberryPi: Continuing with I2C and control using a switch, I try to use gcc instead of a makefile. After some attempts it seems to work but with some odd errors. How come? Also, Remmina and ssh are given a chance. Click the image to watch the video.
Mirft2: Checking the cycles with walking again, on an improved scaffold. But what's with the red colour in the images? Why does it show yellow? Time to check HSV. Click the image to watch the video.
Mydfir: So what's wrong with the linefollowing? After some trying, the data shows something I didn't expect. And the algorithm doesn't cover. How to solve this? Then with objects, once again, why does it turn the other way? Click the image to watch the video.
Arduino Yún: The NULL doesn't have the desired effect, so how to solve it? Then: why is the array in Octave different? What's with Scilab? Array oops in rows? Click the image to watch the video.
Discovery: Starting with a connection oops, which has an unexpected (but logical) solution. Then: back to counter. What's wrong? Changes to the algorithm as well as using the cloth again, slowly reveals a possible cause. But is it? Click the image to watch the video.
Arduino MegaADK: Checking on pwm and ports. Finding some rewiring and actual reading solves problems. But all of them? Click the image to watch the video.
RaspberryPi2 & ROS: Trying to solve a broken roscore, checking VNC vs. Remmina, and ssh instead of a second VNC. How will this work out? Click the image to watch the video.
BeagleBoard & monorail: More testing after the latest reconstruction. This leads to some rewiring and plans for a major change. Click the image to watch the video.
6 July
Arduino Mega2560: Focus on fischertechnik again: why doesn't a motor work? Code? Wiring? Signal strength? Testing shows the motor does work, so what's up? Click the image to watch the video.
Hand: Again focus is on the chain tension: what's going wrong? Several modifications to the motor connection, but what will work? Click the image to watch the video.
RaspberryPi: Checking the makefile for I2C to handle the switch, I also check for the raspicam and another vnc solution. What works? Click the image to watch the video.
Mirft2: Testing various distances on and off the scaffold. This gives some insight as well as unexpected results. What's up? How come? What's the pattern? Click the image to watch the video.
Mydfir: Further testing and meeting with lots of problems and questions. What's up with the motor? Is the algorithm wrong or right? Click the image to watch the video.
Arduino Yún: Again: data acquisition for display in Octave and Scilab. But what about the 9999? And what about the 3 red LEDs? Program or wiring? Click the image to watch the video.
Discovery: Again a connection problem but what's the cause? When finally solved, after checking firmware and such, I find that counters still have an issue. But why? Click the image to watch the video.
Arduino MegaADK: Continuing with the attempt to find out what's wrong. Which signals are read from where and can I use the potmeter again? The result is somewhat unclear. Click the image to watch the video.
RaspberryPi2 & ROS: After a viewers' suggestion, I test VNC with Remmina to see if copying will work. After that I try rosrun which goes oops..and roscore. What's up? Click the image to watch the video.
BeagleBoard & monorail: Another reconstruction in needed so I after some trying it looks good. But will it work? In both directions? Click the image to watch the video.
29 June
Arduino Mega2560: Now I2C is working, it's time to get pwm motors working again. This leads to timing, rewiring and a big oops. What's up? Click the image to watch the video.
Hand: Checking the chain length, motor connection and switch location leads to another reconstruction. Will this solve the slipping chain? Why does the switch have to be relocated anyway? Click the image to watch the video.
RaspberryPi: New attempts to use I2C with the pigpio library. What works when? Why are errors not consistent? Also: the RaspiCam. Click the image to watch the video.
Mirft2: Starting with a power-off during setting the date/time, I also get a grey screen. To enable better testing I create a scaffold and find some odd results. Click the image to watch the video.
Mydfir: Testing the algorithm with diagnose to see what happens on linefollowing. This leads to an unpleasant idea: connection speed? What does the datafile say? Click the image to watch the file.
Arduino Yún: Another attempt to get the data into a nice array and displayed in Octave. This leads to an analysis of the code, more trying to get data, wondering about the date and time of the datalog and a correction for complex numbers in Octave. What's next? Click the image to watch the video.
Discovery: Tyring again to analyze what's going wrong and why, Murphy pays a visit. Ugh. Click the image to watch the video.
Arduino MegaADK: Going on with checking ports and circuits, pwm values and signals. Is there any way I can check and compare? And what will the results be? Not too hopeful.. Click the image to watch the video.
RaspberryPi2 & ROS: Continuing with C++, I find some errors in my code. But then things stay weird: why doesn't rosrun work? Why does rospack work? What about rostopic? Click the image to watch the video.
BealgeBoard & monorail: Doing the reconstruction I planned last time. Question is if it will solve the problem. Then I find another cause of friction and have to modify quite a bit. What's next? Click the image to watch the video.
22 June
Arduino Mega2560: Trying to get the delay for pwm in the I2C working. After some searching I find that the solution is somewhat different than I thought. But it works, kind of. Click the image to watch the video.
Hand: Continuing with the timing of switch 11 for the yaw, I'm in for a surprise and disappointment. Also, a reconstruction and modification are necessary after an incident and an reccuring issue. Click the image to watch the video.
RaspberryPi: Focus on I2C to get a switch working. Adapting a makefile leads to a surprise but will it make the switch work? Also: the raspi-cam in use again. Click the image to watch the video.
Mirft2: Focus is on distance in the code: what's the difference with counter? This gives a surprising answer, but how come? Also, lifting it up during walking gives a clue about yet another issue. Click the image to watch the video.
Mydfir: Going on with the distance, a strange reaction takes me back to checking the line algorithm. What's up? I may have to change it but how? Then an angle issue changes insight. Click the image to watch the video.
Arduino Yún: Focus on data: why is the array so messy? And why does Scilab show nothing and Octave complex numbers? Time to analyze the algorithm. Click the image to watch the video.
Discovery: Focus again on distance, speed vs. sonar. Finding some oopses in the code, and with manual aid I can do something. But how fast should it be? And when is the distance real? Click the image to watch the video.
Arduino MegaADK: Again, ports that seem to not work properly, giving the wrong value. And what does the pwm do? After testing with doubtful results I find an oops, but will solving it make it better? Click the image to watch the video.
RaspberryPi2 & ROS: Again, Python vs. C++. This time, debugging, recoding and (partly) following the tutorial should get me back in. I hope. Click the image to watch the video.
BeagleBoard & monorail: Using the HDMI-connected monitor as well as VNC, I test and observe several situations. What happens exactly? Why? Why does 1 direction still work better? The analysis leads to a plan for next time. Click the image to watch the video.
15 June
Arduino Mega2560: Again I2C in combination with pwm: how can I get a delay working? After another attempt I'm in for an oops and a surprise. But also: what's up with the signal on the oscilloscope? Click the image to watch the video.
Hand: Focussing on the yaw: what goes wrong with the switch? What about the timing? What about the direction? How about the algorithm? Click the image to watch the video.
RaspberryPi: I2C: adding an fischertechnik LED to complete the 8 and replacing the button by an ft switch, but does the makefile work? Click the image to watch the video.
Mirft2: With a rewire solution for getCurrentDistance() is find that results are very strange: from nice values to ... ? And another mistake with editing the video results in the second part going wrong with 11 missing minutes. GRRR. Click the image to watch the video.
Mydfir: Continuing from last time. I change the minimum and maximum distance. Also, I find that something is off with sensors. Finally, I may have to rethink the complete algorithm. Click the image to watch the video.
Arduino Yún: Again: how to get data and time via an array into file storage and getting a nice graphin either Scilab or Octave. Some oopses, but somehow there's result. For now. Click the image to watch the video.
Discovery: With the speed dilemma, I decide to increase the distance for the sonar if's. But what about the speed? Then the camera angle gives an issue but how? What works better: cloth or no? Click the image to watch the video.
Arduino MegaADK: Checking the RC circuit again and focussing on port values, actually pwm. So will another LED work? What about the motor with propeller? The monitor does show the wrong stuff, but what does the oscilloscope show? Click the image to watch the video.
RaspberryPi2 & ROS: Focus is on C++ again: how to get it working? Adjusting the settings gives a problem and working with only 1 screen does too. How to solve all of this? Click the image to watch the video.
BeagleBoard & monorail: After analysis of the motion by diagnose and algorithm, I decided to a modification of the roller setup. Question: does this influence the speed in any direction? Something seems still off, but what? Click the image to watch the video.
8 June
Arduino Mega2560: Starting with the Uno, I need to check on pwm and wiring. Then why doesn't delay work? Searching leads to millis and a timeout. But does it work? Click the image to watch the video.
Hand: Another reconstruction of the motor connection with the arm. This leads to checking the chain: will this actually work or is a small change necessary? A test in the end will reveal the result. Click the image to watch the video.
RaspberryPi: Continuing I2C experiments, I have to check the wiring. Then for expanding the circuit, in search through samples of C to read a button and find a nice solution and a problem. Click the image to watch the video.
Mydfir: Focus is again on the sonar at 8 cm distance from objects. What happens and why? Is motor 1 really at left? How many cm. is needed? How to go on? Click the image to watch the video.
Arduino Yún: Again, focus on system time, shifting to time. Then: how to get time into column 0? And into Scilab, Octave, gnuplot? Would it work? Click the image to watch the video.
Discovery: Focus again on speed, what does a cloth do? The results are strange..how strong do the motors need to be? Why the turns? Facing an algorithm dilemma. Click the image to watch the video.
Arduino MegaADK: Checking on the RC circuit powered by port2, it still is weird. Then: how about A5? and 6? What does the serial monitor show (if anything)? Something is really odd, but why? Click the image to watch the video.
RaspberryPi2 & ROS: After last time, I'm making a new start using C++. What to do and how to do it? What will work? Back to the tutorials... Click the image to watch the video.
BeagleBoard & monorail: Continuing with the wired adapter, something is wrong executing anything on the interface. But why? After solving it, focus it again on the stability of the carriage. Will it work out? Click the image to watch the video.
1 June
Arduino Mega2560: Continuing with the delay en for-loop within I2C, the next question is why the fischertechnik motor isn't working as should be. Measuring gives an interesting clue. Click the image to watch the video.
Hand: After the problem last time, the wrist motor needs another reconstruction. But how? Several attempts end up by adding a chain. But will this work out? Is it robust enough? Ending with a pivot oops. Click the image to watch the video.
RaspberryPi: After last time, how will the I2C test go? Not so well: trying reboot power-cycle to get going. Then shifting to wiringpi and finding out that a small change in the algorithm is needed. Click the image to watch the video.
Mirft2: Counter vs. distance again. Will changing the algorithm make a difference? How about the wiring? Some mistake cleared, but does it help? OpenCV/HSV picture check. Click the image to watch the video.
Mydfir: Checking on the sonar and linefollowing again. What's up with the reverse? And the linefollowing? Changing the algorithm on motor direction, what will be the result? Click the image to watch the video.
Arduino Yún: For getting the date or time into an array at e.g. [0, 0], I have to read it. So first: set it using the web interface. Then: program it in to the code. Will it go nicely? What will Scilab. Octave and gnuplot show? Click the image to watch the video.
Discovery: The first test is crap and followed by the usual errors. Finally, even w/out code change it works again. But what's with the speed? What's with the if-conditions? Click the image to watch the video.
Arduino MegaADK: After a short test, I find that more has gone wrong. So conentrating on the RC circuit, I start new code from scratch. But will that work? What's with the wiring? Click the image to watch the video.
RaspberryPi2 & ROS: Starting with a very low speed, I need to update. After that, a final series of tests and analysis leads to a decision. Click the image to watch the video.
BeagleBoard & monorail: After buying a USB-Ethernet converter, I want to use it but something acts up. After reverting to wifi, I locate the carriage in the middle and analyze again with some results on speed and a roller. BTW, after recording this video, I managed to get the converter working perfectly. Click the image to watch the video.
25 May
Arduino Mega2560: First: rewiring a transistor circuit for a motor. Then again: I2C. Will sending different bytes work? Why doesn't the pwm delay work? Does any delay work at all? What would a workaround show? Click the image to watch the video.
Hand: Focus is on the switch that should activate the yaw motor, so time for reconstruction. Then it turns out that the pivot motor still isn't mounted robust enough. But how to change it? Click the image to watch the video.
RaspberryPi: With the focus again on I2C with the mcp23008, I try again and find that it works with the demo. Not only does i2cdetect shows 0x20 but the LEDs are walking! Expanding the number of LEDs gives a problem at first and the wiringpi still doesn't work. But big progress for now. Click the image to watch the video.
Mirft2: Once again, focus is on distance and counters. Why the difference between Python and ROBOPro? What's up with the wiring? What does the API (ftrobopy) say? Click the image to watch the video.
Mydfir: Following the line in the opposite direction, things don't go ok but why? Losing the line, pushing objects, odd turns. What's up? A big mistake in the algorithm and changing a variable to search better. Click the image to watch the video.
Arduino Yún: Starting with an oops, data has to be read and displayed in a graph. Using gnuplot, Octave and Scilab, what works nicest? Then ending with an oops when trying to enter data while controling fischertechnik. Click the image to watch the video.
Discovery: After a rather weird start, why are most of the if-conditions not met? An analysis of the algorithm shows some shortcomings, so some changes are added and an error is fixed. But will all of this help? Click the image to watch the video.
MegaADK: First focus: why does the output act strange? Does changing the software help? Then: some wiring checkout. Does it help to disconnect a motor? Or an LED? Or should I start from scratch? Click the image to watch the video.
BeagleBoard & monorail: Testing speed and signal and analyzing the results leads to a small modification. But will it have result? Click the image to watch the video.
18 May
Mega2560: Focus is again on I2C: how to make the LED react on the set delay. This results is some code changes, but do they help? Some surprising outputs leads to questions, but does it solve the pwm problem? Click the image to watch the video.
Hand: Following viewer comments to solder the wrist motor wiring and apply a chain, I try if it can be done. It turns out, I need to reconstruct the motor setup completely because the current way doesn't work out. Will it finally work? Click the image to watch the video.
RaspberryPi: Once again: I2C. After checking an LED using fischertechnik and ordinary power to see whether it's a hardware issue. Then trying again wiringpi, demo and piscope shows there's something with sudo. After that, changing the timebase shows something else as well. How to go on? Click the image to watch the video.
Mirft2: Focussing on counter and distance, I need to check which is coming from where...what's the wiring and what's the code. Why is one counter kind of ok in Python but not in ROBOPro? What's up with the distance anyway? Click the image to watch the video.
Mydfir: Checking on the linefollowing, I find things go very wrong. Time to check the sensors. Data shows that the 2nd sonar doesn't seem to go reverse, but why? Time to go over the algorithm again. Click the image to watch the video.
Arduino Yún: Continuing with data using octave and gnuplot, what will be the result? Can I select rows the way I want? Some progress, but I need something more. Click the image to watch the video.
Discovery: Again, the focus is on speed: what is good for the algorithm? Testing and experiencing oopses but why? Click the image to watch the video.
Arduino MegaADK: Focus is first on pwm for the mechatronics which leads to using Scilab again. Then the RC circuit: what's wrong there? What's the difference with other code? A change in gEDA is necessary. Click the image to watch the video.
RaspberryPi2 & ROS: Time for a thorough analysis of the original robot_pi package. What does the error really mean according to this info? Is the path ok? Click the image to watch the video.
BeagleBoard & monorail: Starting from the other end of the monorail track, what will happen? During observation it shows there's a distance problem, which has to be solved by modification. But will this solve anything? Click the image to watch the video.
11 May
Arduino Mega2560: Focussing on I2C again, a wiring oops is a solution for the LED, after which a pwm riddle shows up. But what is the cause? Then checking the motor/transistor pwm riddle and a compare with the other motors. So how come this doesn't work? Click the image to watch the video.
Hand: Focus is again on the wrist, more in detail the motor setup and switch 11. After deciding what to do, it ends with a reconstruction and an unexpected result. But how come? What's the best solution Click the image to watch the video.
RaspberryPi: Again, trying to get I2C working. Using the wiringpi library, what happens? Does anotehr change to the algorithm help? A surprise result with the demo...how come? Click the image to watch the video.
Mirft2: Focus is again on counter and distance: what's up? Fixing a wire, walking on cloth but why does it stop so soon? Why the difference between Python and ROBOPro? Click the image to watch the video.
Mydfir: Again, can the robot follow the line? What about the battery? Why does the interface reset? Why does it ignore objects? Why the odd distances? Click the image to watch the video.
Arduino Yún: Continuing putting data in an array of integers. After determining what to further put in the array, I meet with a familiar oops. Can this be solved? Changing settings on the electronics, I find things might work. Click the image to watch the video.
Discovery: First a test with an unexpected ending. Then as decided last time: lowering the speed and an analysis on images as well as screen output. Finally something happens, but what about the rest? Click the image to watch the video.
Arduino MegaADK: Focus is on pwm (pulsewidthmodulation) riddles again: measuring gives the answer, but what is it? Then, what's the value of the signal to an LED? Some very odd values show up. What's going on? Click the image to watch the video.
RaspberryPi2 & ROS: After a massive system update, including ROS, what's the impact? Trying all packages, as well as rosmsg to list messages, what's the result? How to go on? Click the image to watch the video.
BeagleBoard & monorail: Testing the roller properties again after last time's modification. Then an oops with the wifi & VNC. How to go on? What happens why halfway? Click the image to watch the video.
4 May
Mega2560: Starting with a check on fischertechnik: not everything works anymore using transistors. Then: I2C.. changing the "hello" requires a byte change but why doesn't the electronics work? Changing the algorithm and using the oscilloscope shows an oops. Click the image to watch the video.
Hand: With the lower gears solved,what about the timing of yaw and pivot? The motor seems to have a bad connection with the pivot and the switch isn't very robust. What to do? An algorithm change helps a bit, but how to proceed? Click the image to watch the video.
RaspberryPi: With the focus on I2C again, what's with wiringPi? I manage to get it compiled, but what does it do and how? Debugging sheds some light, but then what's up? What does it do? Click the image to watch the video.
Mirft2: Due to a mistake, the first 6 minutes of screencast are missing: checkout of the robot with frame reset and feet removal. Further: using ROBOPro to check battery, counter and imagemagick to check on OpenCV images. Questions remain. Click the image to watch the video.
Mydfir: Testing backwards again, things finally to work out...only to go wrong a few times. How come? Colours? Flat vs. rough object? Losing the line? Click the image to watch the video.
Arduino Yún: Another attempt to get data read from the circuits in to a file meets with an error. After finally solving it, I have to change the algorithm a bit to get the data nice into the file. Only to get an error in Octave that shouldn't occur. Click the image to watch the video.
Discovery: Analyzing the stages of the trajectory, sonar condition, images and timing leads to a small change in the algorithm, with an unexpected conclusion after another test. Click the image to watch the video.
Arduino MegaADK: Trying the motors again, and checking various signals. This results in wiring corrections, but questions remain. Click the image to watch the video.
BeagleBoard & monorail: Starting with a view at the HDMI screen, I continue with a problematic carriage. When I find out what the cause is, it looks simple enough for just a modification. But will it keep working? Click the image to watch the video.
27 April
Arduino Mega2560: Time for a new idea in combination with the Uno: I2C. For now just following an example, how will it work? Click the image to watch the video.
Hand: First testing all of it, then a look at the lower gears. Why not change the speed a bit for a short time? This seems to work.. but what's again with the wrist? Time? Speed? Why touch the motor? Click the image to watch the video.
RaspberryPi: Trying to get I2C working, but how? The text from boot shows everything is loaded. The test shows it doesn't work. Searching again brings to a different part of something familiar. Will this really help me out again? Click the image to watch the video.
Mirft2: Starting with rubber feet and reconstruction to see how it holds (and some gear issue), I continue with OpenCV and HSV. How will things work out? Click the image to watch the video.
Mydfir: Focus is again on reaction of the robot after sensing an object: what happens and why? Then a small change in the algorithm seems to solve a problem. What if? Click the image to watch the video
Arduino Yún: Again, focus is on data array and after some trying a switch to integer data only. Although that works better, no data is stored. Until a small change in the algorithm. Click the image to watch the video.
Discovery: So why doesn't the robot ride anymore? Some serious analysis, a bit of code change and an idea. And what about the sonar conditions? Click the image to watch the video.
Arduino MegaADK: Starting with an oops, I manage to solve it, but find several issue that have to be resolved. Will it all work out? Click the image to watch the video.
RaspberryPi2 & ROS: Alternative start: HDMI monitor. Then: testing the hardware and tryinh the message again. 1 package left, so changing the settings and try. What will happen? Click the image to watch the video.
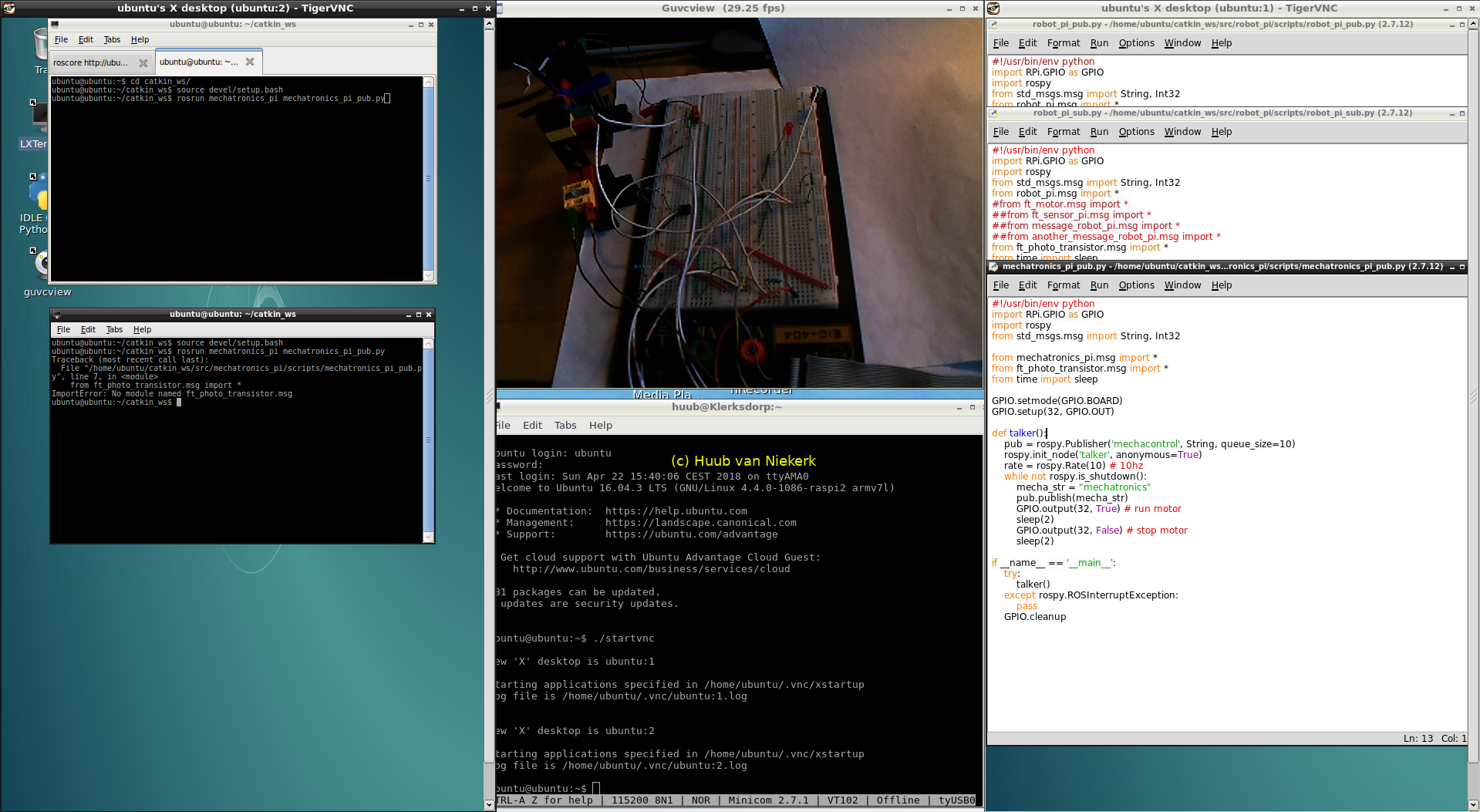
BeagleBoard & monorail: After last time, I need to find a good solution to the wiring. Instead. I find another mystery. But how to solve it? Finally, it seems I've found some solution to the wiring, but still a problem remains. Click the image to watch the video.
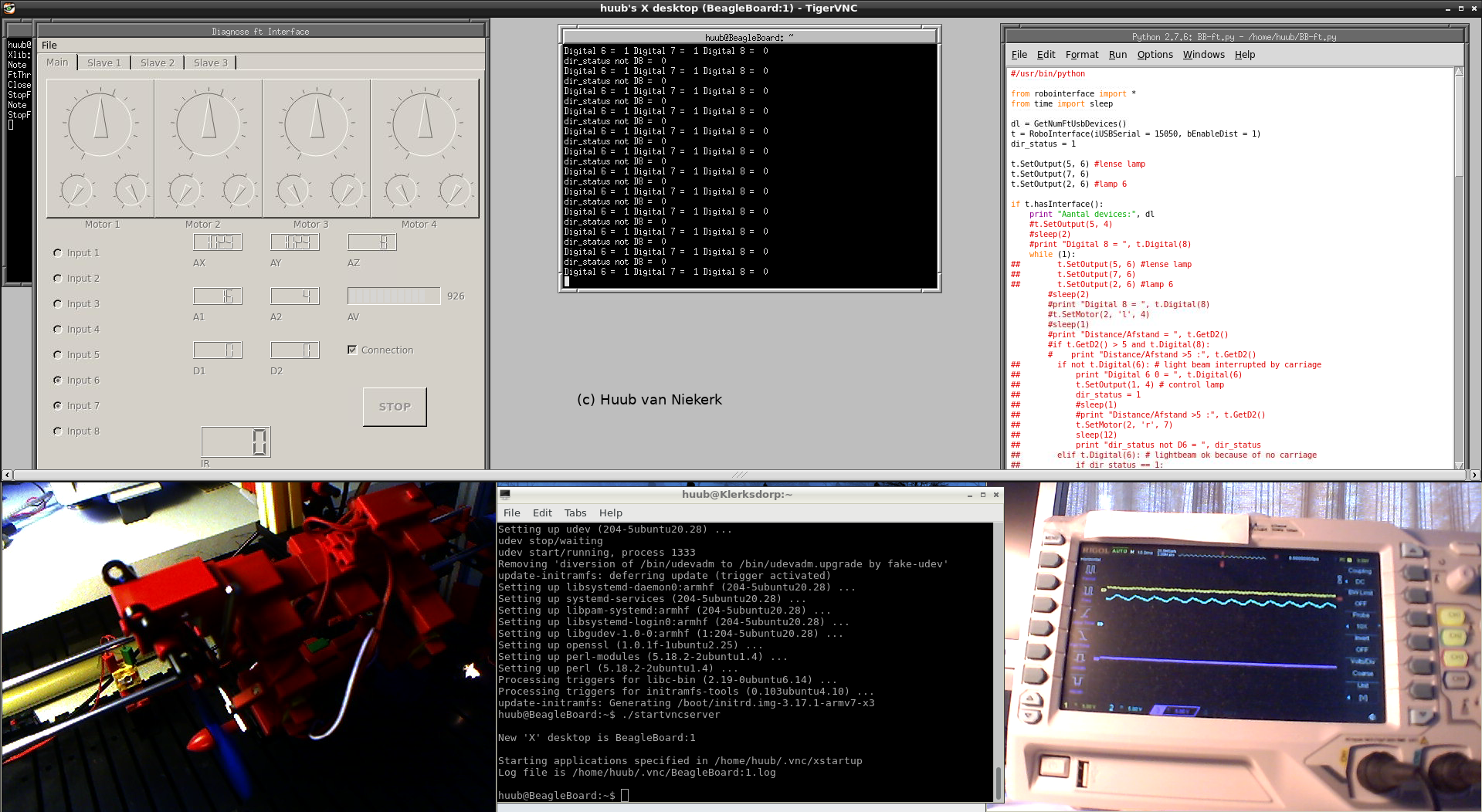
20 April
Arduino Mega2560: Checking the fischertechnik motor again: what's up with the wiring? Then SPI: something is still odd, so a thorough analysis of SPDR and more. Will there be any clarity? Click the image to watch the video.
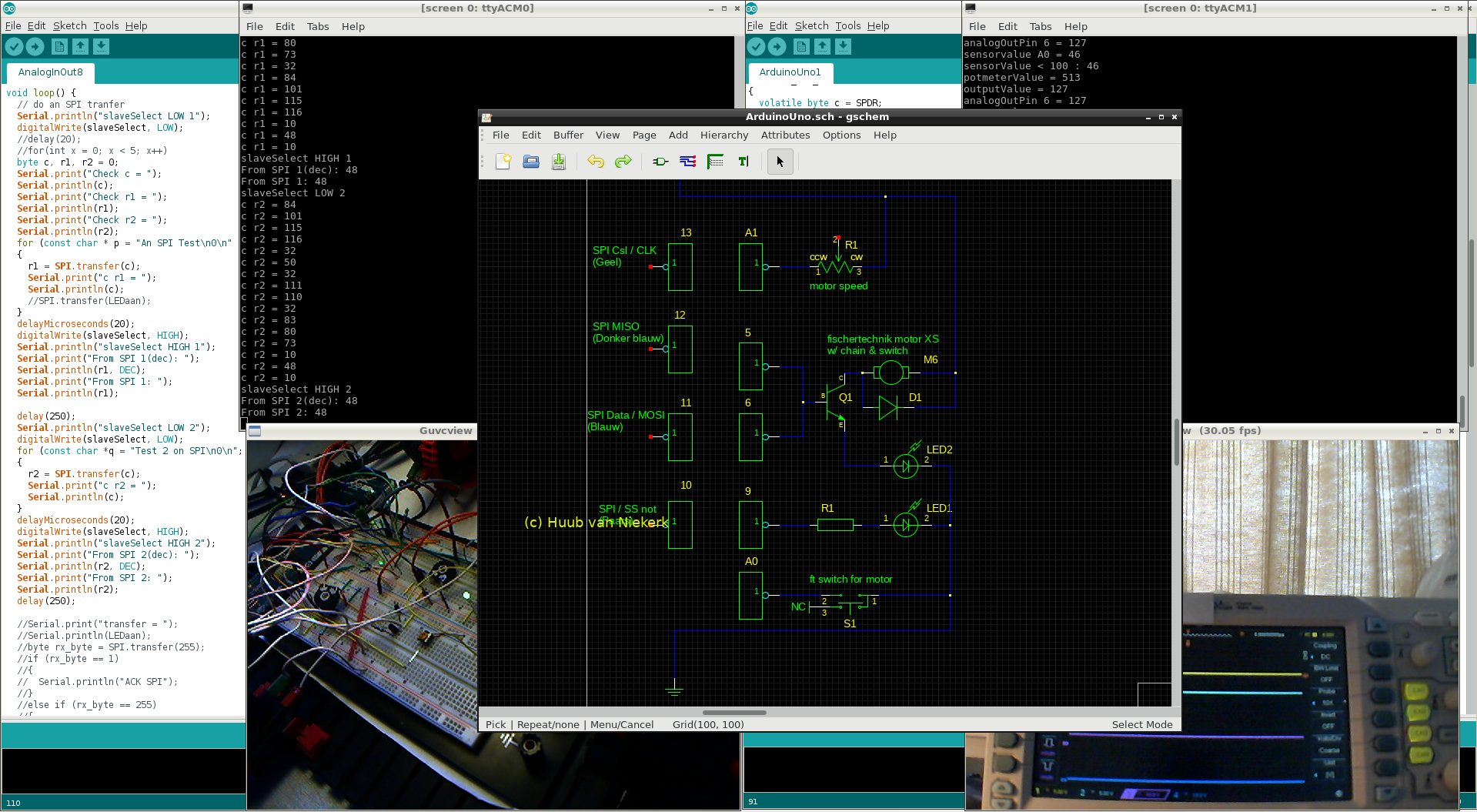
Hand: Starting with a motoric and sensor test, something else happens which needs a reconstruction. After that, what work, and what not? Click the image to watch the video.
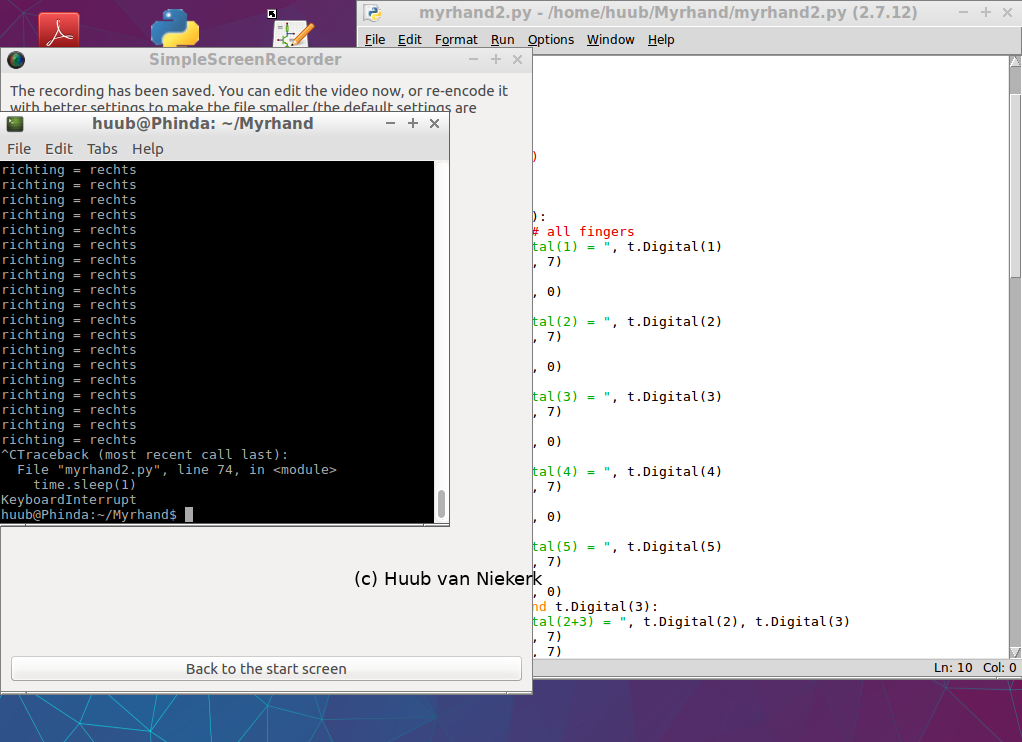
RaspberryPi: Using i2cdetect and raspi-config I try to get some verification. Will a reboot, help this time? Then I make a big oops using config, but continue working. I do a test using piscope with a surprising result. So what's up?! Click the image to watch the video.
Mirft2: Starting with an oops, it becomes big OOPS: testing the whole code again, finding part of a foot and some HSV imaging making sense. Click the image to watch the video.
Mydfir: Testing sonar and linefollowing leads to several questions. again. E.g., why doesn't the robot drive backwards when meeting an object? Adding to the algorithm shows a clue. Click the image to watch the video.
Arduino MegaADK: Testing the mechatronics on LDR and propeller shows there's a problem somewhere. Time to test: motor, wiring, signals, power. What's the culprit? Click the image to watch the video.
Discovery: Adding another motor stop for camera and changing the camera function for OpenCV to use HSV. Will things finally start to work now? Click the image to watch the video.
Arduino Yún: Continuing to convert integer into a char * array and finding again it's not easy. How do I retain a value? If I can... Click the image to watch the video.
RaspberryPi2 & ROS: Trying the packages again and expanding with a message. After some mistakes in settings. what will happen? Does it run? Or does the same error come along? Click the image to watch the video.
BeagleBoard & monorail: Checking speed & wiring: how does the adhesive tape do? Does it run better now? The probes show various results, but why? Weight of an axle? Bad wiring? Click the image to watch the video.
13 April
Arduino Mega2560: Starting with a motor and propeller: why doesn't it run. Wiring? Then back to SPI. What's wrong with the strings? Lower the speed of mechatronics might help. Also, checking the code helps. Will it work? Click the image to watch the video.
Hand: Again, the focus is on the lower gears: motor, wiring, algorithm, sensors and speed. Where does it exactly go wrong? Seems not too clear. Click the image to watch the video.
RaspberryPi: Trying I2C again, I have to run raspi-config again to make the test work. So where's the error? In my program? In the wiring? In the electronics? Click the image to watch the video.
Mirft2: Trying to red a red image, I try some more colour images until I find I need another approach. This seems to work better, but I'm not quite there yet. Also, something with the gears... Click the image to watch the video.
Mydfir: Again: the focus is on data from sonar, linefollowing and colours. I have to change the algorithm a bit to find out what is happening when, but of course nothing happens a second time. Click the image to watch the video.
Arduino Yún: Focussing on storing the data again, but how to do it? I need to do a conversion between C types but somewhere the value gets lost. Wby? How? I can narrow it down, but what then? Click the image to watch the video.
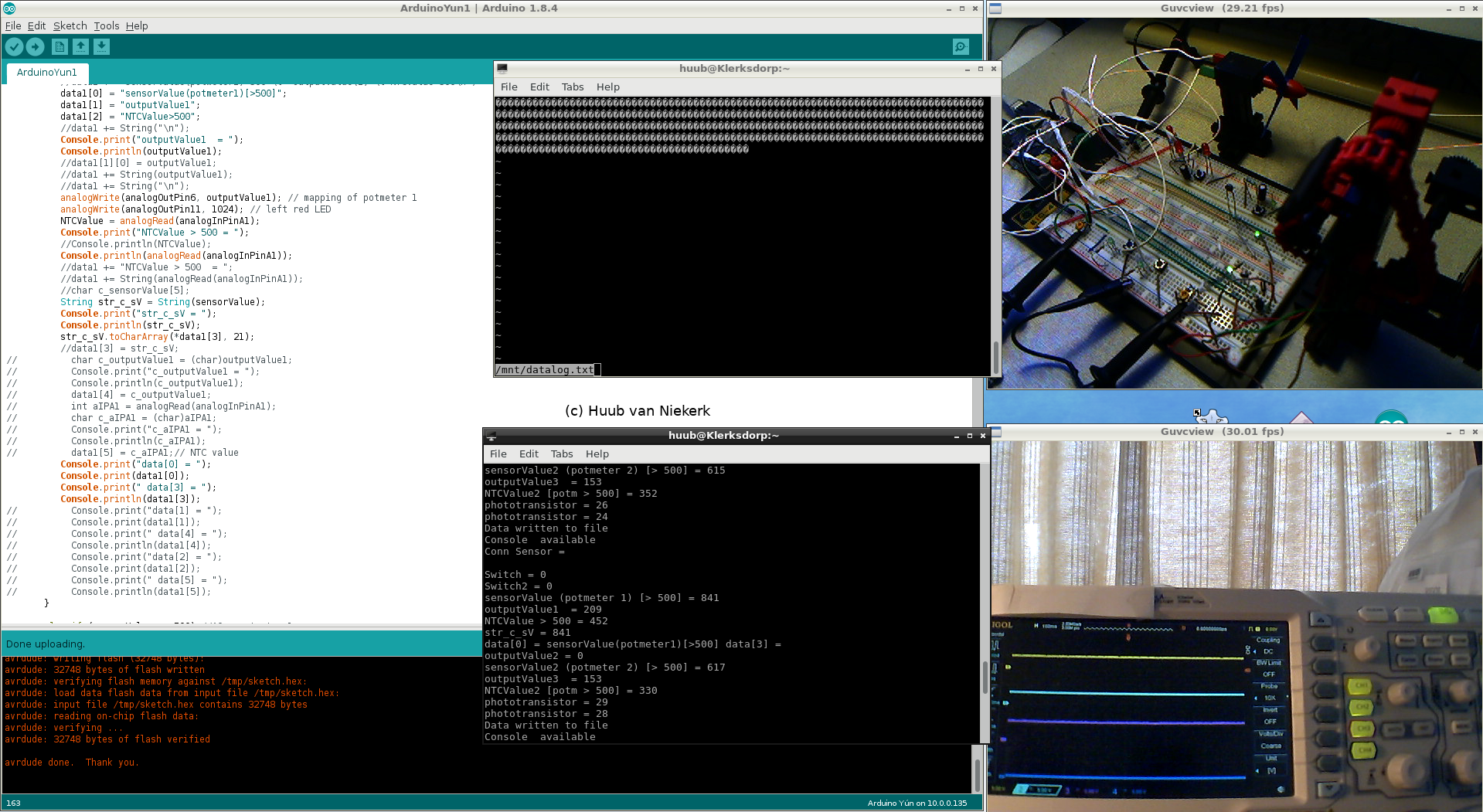
Discovery: Testing the algorithm and a thorough anaylsis of the results leads to a conclusion about covered distances, timing, conditions and more. What to do? Click the image to watch the video.
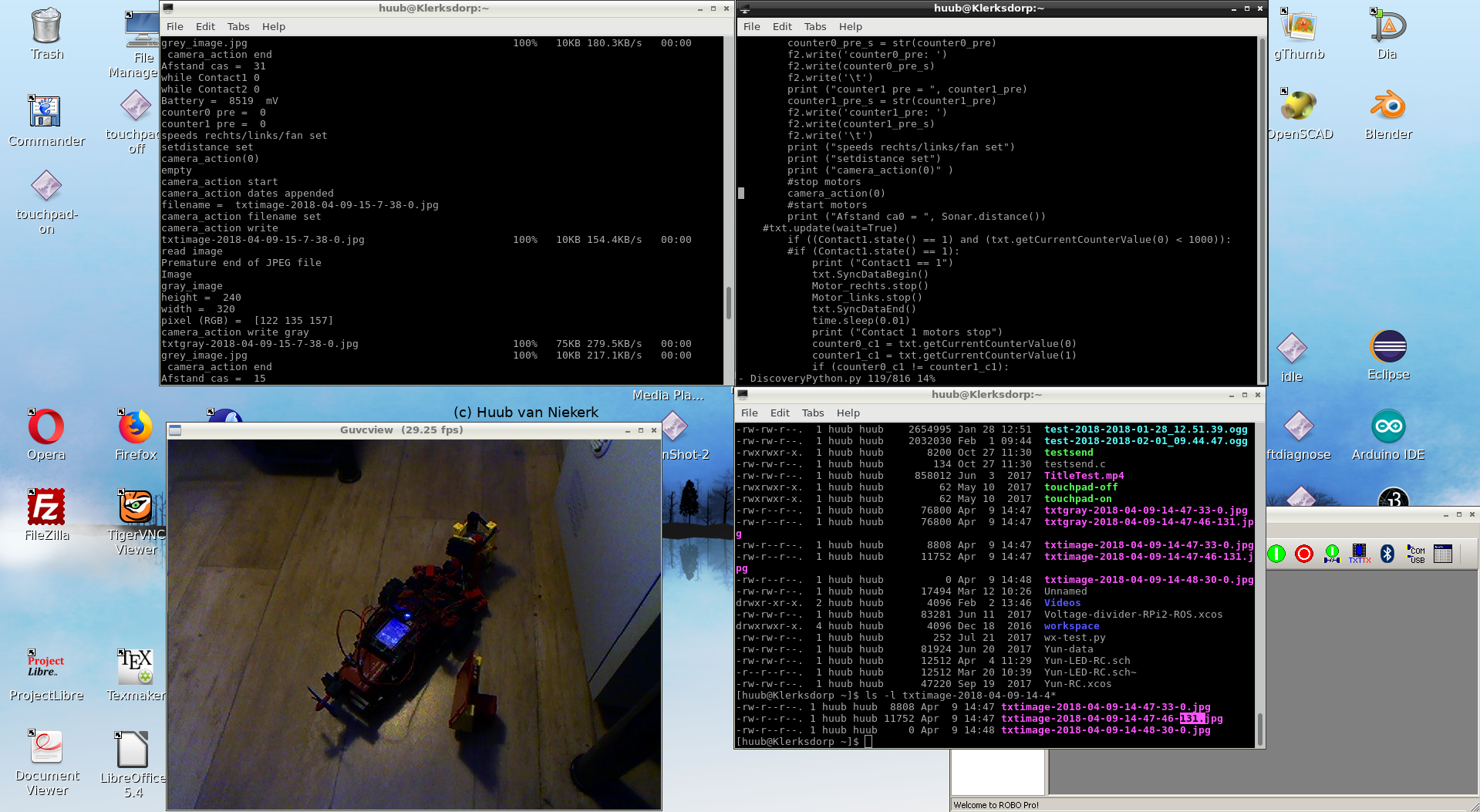
Arduino MegaADK: Last time. a motor stopped. Why? Checking wiring, motors and code reveals some clues, but what are the solutions? Are all signals on the oscilloscope? Some weird stuff. Click the image to watch the video.
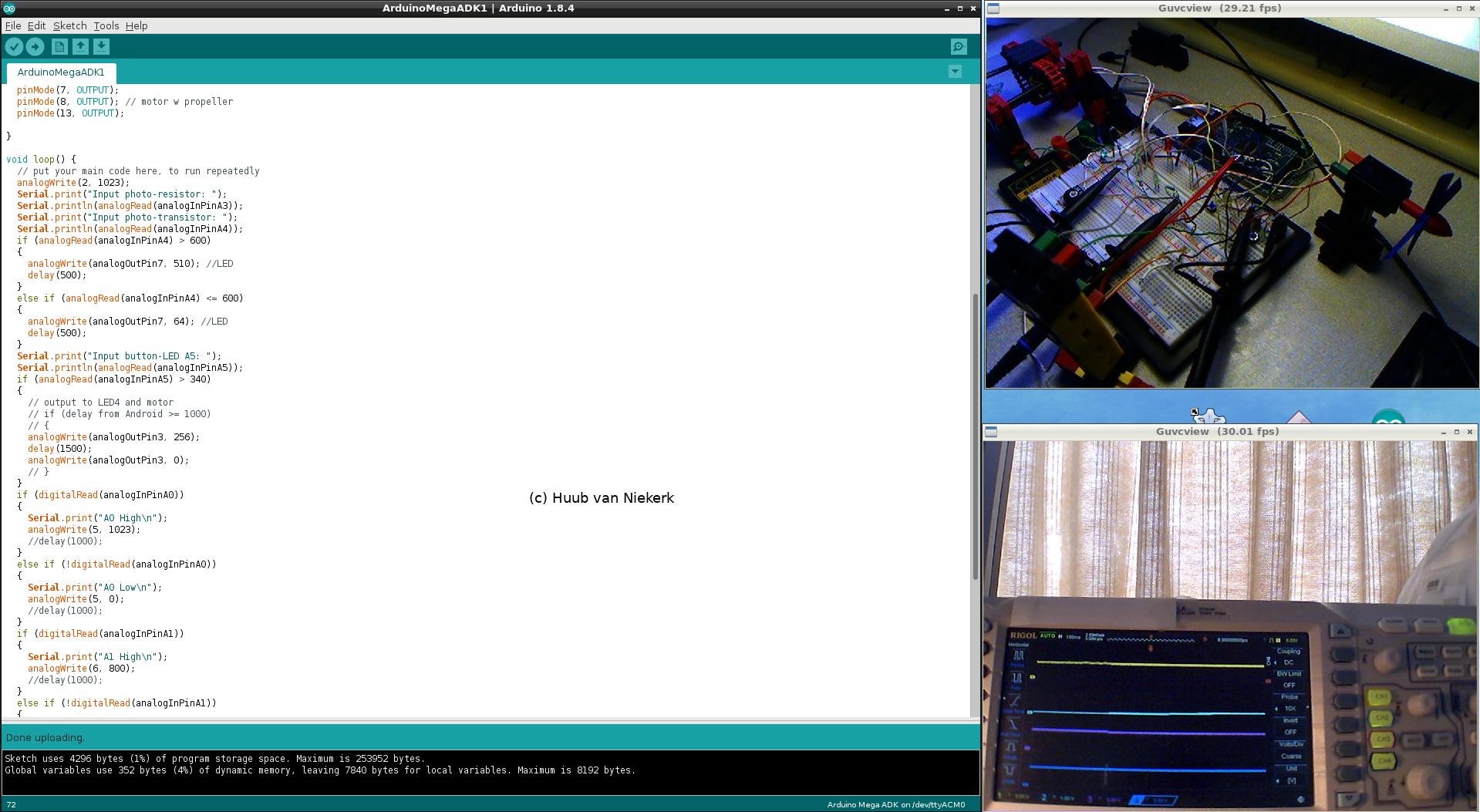
RaspberryPi & ROS: Looking into the packages and difference again, I decide to search the net again. Finding a solution that I tried before but didn't work. Will it work now, having migrated to version 1? Click the image to watch the video.
BeagleBoard & monorail: Driving the carriage goes slow, how about with diagnose? With a little help, it goes like.... Then the reverse again, watch with 2 probes. In the end, I apply a modification, but does it work? Click the image to watch the video.
6 April
Arduino Mega2560: Following advise, I decide to reuse the transistors and rewire. This has direct consequences. Back to SPI: after studying the code, I realized that the string problem has to do with the buffer. Click the image to watch the video.
Hand: A little modification to the weight bin. Then checking the vertikal gears again: replacing the motors and changing the algorithm. What's up with the inconsistencies? How can the algorithm be improved? Click the image to watch the video.
RaspberryPi: Again, testing I2C leads to a new search for a header-file and info as well as a reboot. The info leads to a new setting change, but will this help? Click the image to watch the video.
Mirft2: Focus is on OpenCV with red separation. From this it comes to an algorithm change and a frame modification. But what's up with the colours? Click the image to watch the video.
Mydfir: Following a lijn and sonar picking up something that isn't there...again. Second test...goes way different. So what's what? And why? Click the image to watch the video.
Arduino Yún: Continuing with data conversion and storage of gathered input from the fischertechnik mechatronics, what will happen? Will it work or is it impossible? Click the image to watch the video.
Discovery: Again, checking the algorithm to see if the trajectory is completed. What's up? Some mistakes, but more questions. Ending with another mysterious run, why? Click the image to watch the video.
Arduino MegaADK: Following advise to correctly control the pwm motors, I re-introduce the
transistor/diode/LED, except that meet with a problem (but what's new..). Checking the rest, it seems to work, so what's up? Click the image to watch the video.
BeagleBoard & monorail: Testing and modifying: what works and what doesn't? Measuring signals give a clue. Giving a bit aid, the course seems to work, and raises a whole new question. Click the image to watch the video.
30 March
Arduino Mega2560: Continuing with the XM motor and propeller: what's the pwm value? Or is the wiring? Simple to find out, or is it? Then back to SPI: what's up? Click the image to watch the video.
Hand: To handle the counterweights easier, I decide to modify the way they're held. This brings unforeseen consequences. How to deal with this? A solution is found, but how about the software? Click the image to watch the video.
RaspberryPi: Tyring I2C again, with more electronics. Does the test work? How does the RPi start up? Are all headerfiles there? Click the image to watch the video.
Mirft2: Starting with a power issue, I need to check the battery. Then examining an image, I find that I have to do something with the red colour. But will it work? Click the image to watch the video.
Mydfir: Trying to test the improved linefollwer algorithm ends in something different: sonar test. What is happening and why? Another change in algorithm brings other questions about the data. But how, and what? Click the image to watch the video.
Arduino Yún: After testing the hardware, focus us again on the data: how can I get it right? Why do the values not get shown on screen? What about the stored data? Click the image to watch the video.
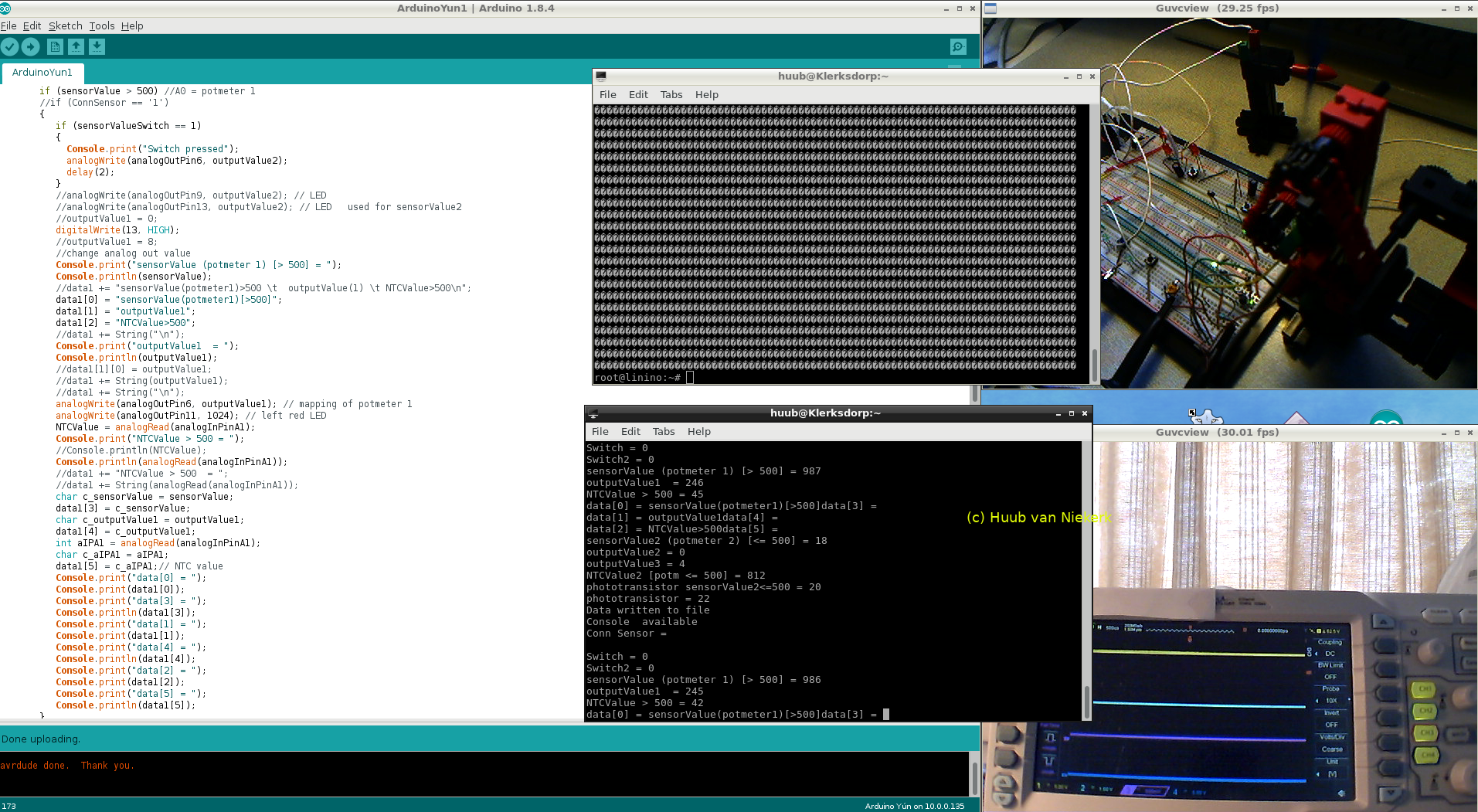
Discovery: Using camera images to verify the trajectory and the distance, I find that I should change the algorithm. Click the image to watch the video.
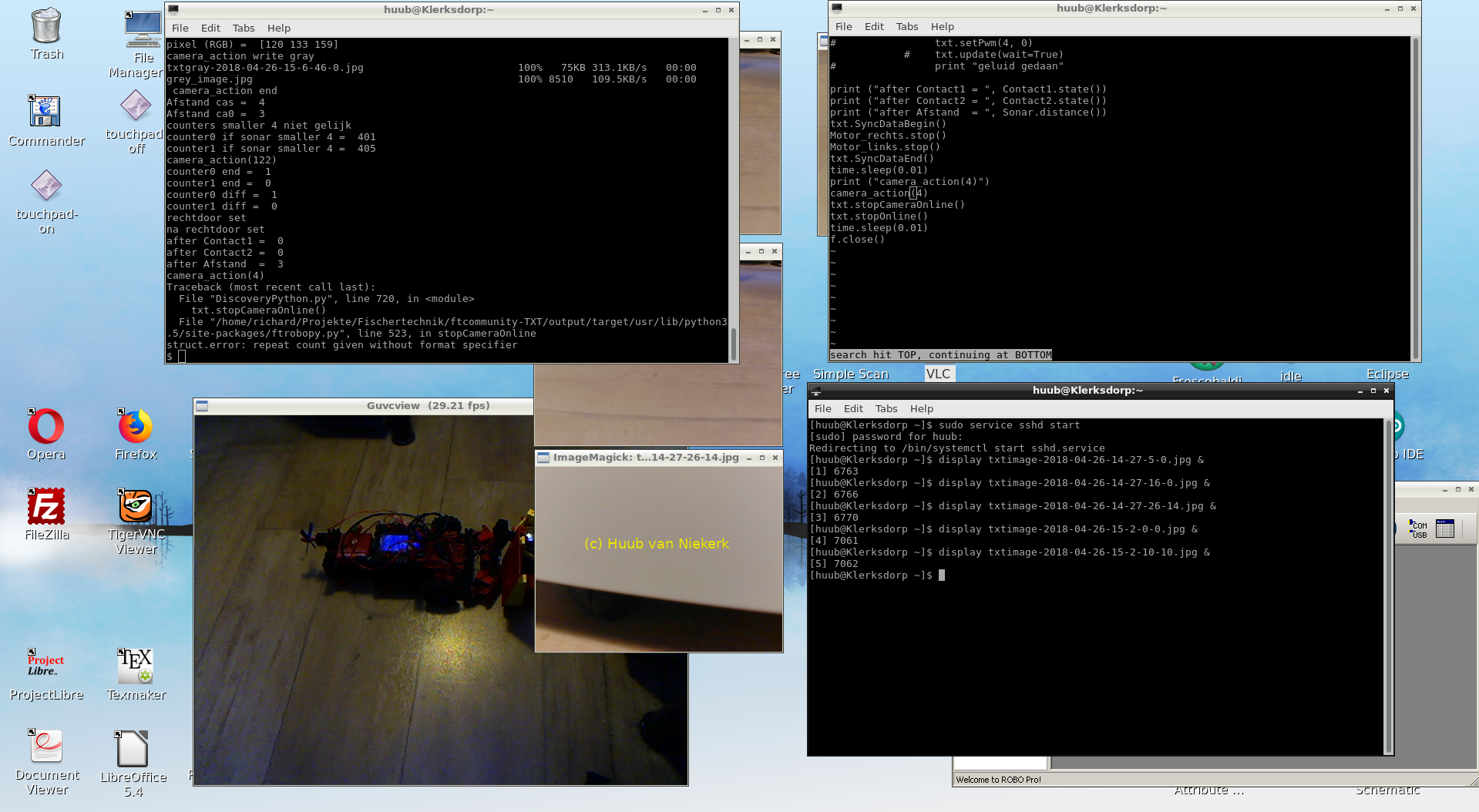
Arduino MegaADK: Testing the phototransistor and lenselamp to see a signal, adding an LED to be independent of the scope. This requires a code change but does it work? Checking the NTC gives questions. Click the image to watch the video.
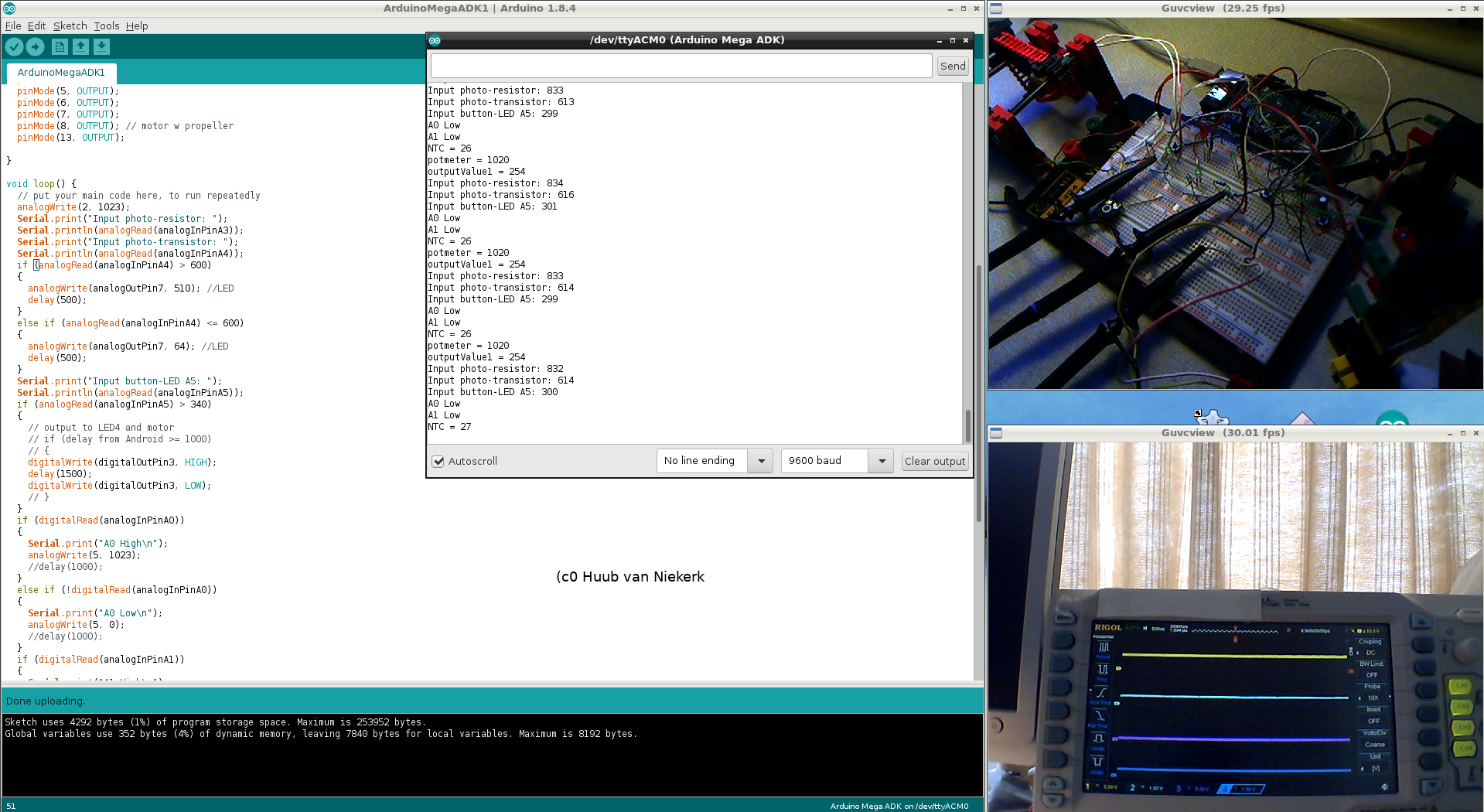
RaspberryPi2 & ROS: Trying to solve the executable problem, I check further on the creation of packages. Several questions arise. but how about answers? Click the image to watch the video.
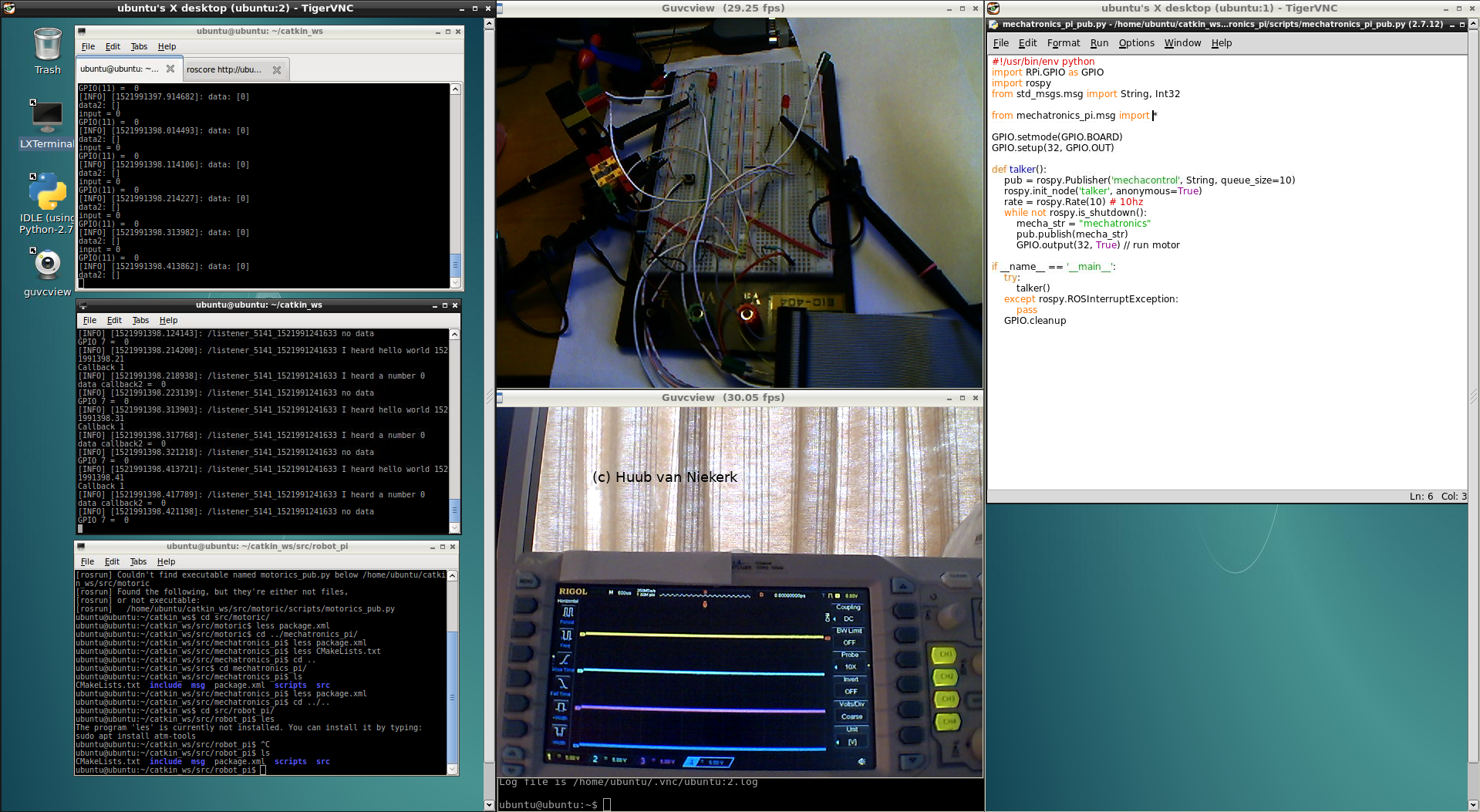
BeagleBoard & monorail: Searching for the cause of the friction, I start with the final idea of the last time: wheels. This progresses in checking the alignment, sensor, wiring and rods. What's up? Click the image to watch the video.
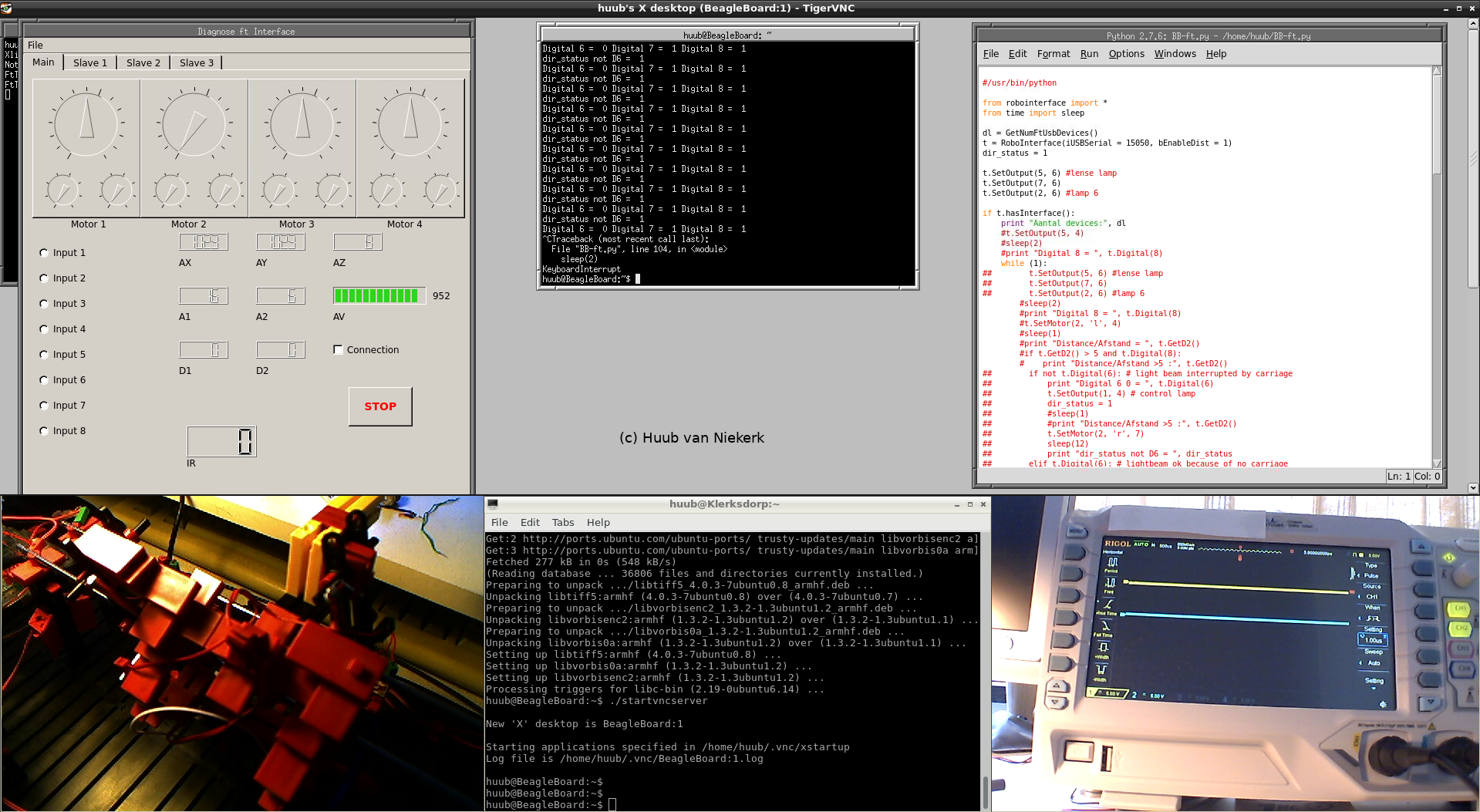
23 March
Arduino Mega2560: With 1 of the propeller motors into another project, I have to replace it..but it won't run. Why? Back to what's what: code, wiring, electronics, gEDA, pwm values, ports. But will it work? Click the image to watch the video.
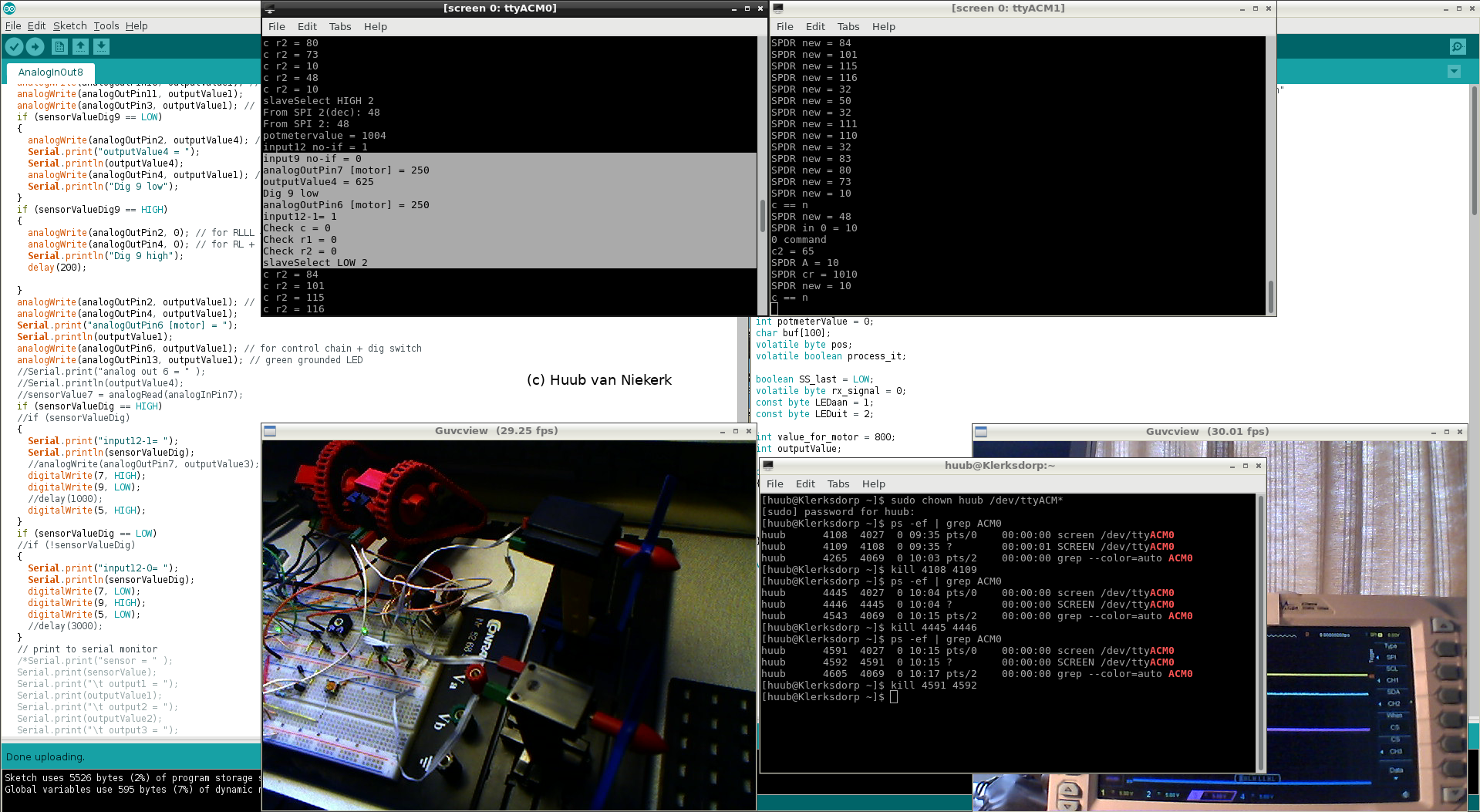
Hand: Focus is on the contraweights, speed of the vertical gears, robustness of the carm and the tension of the cord. What's going wrong and why? Click the image to watch the video.
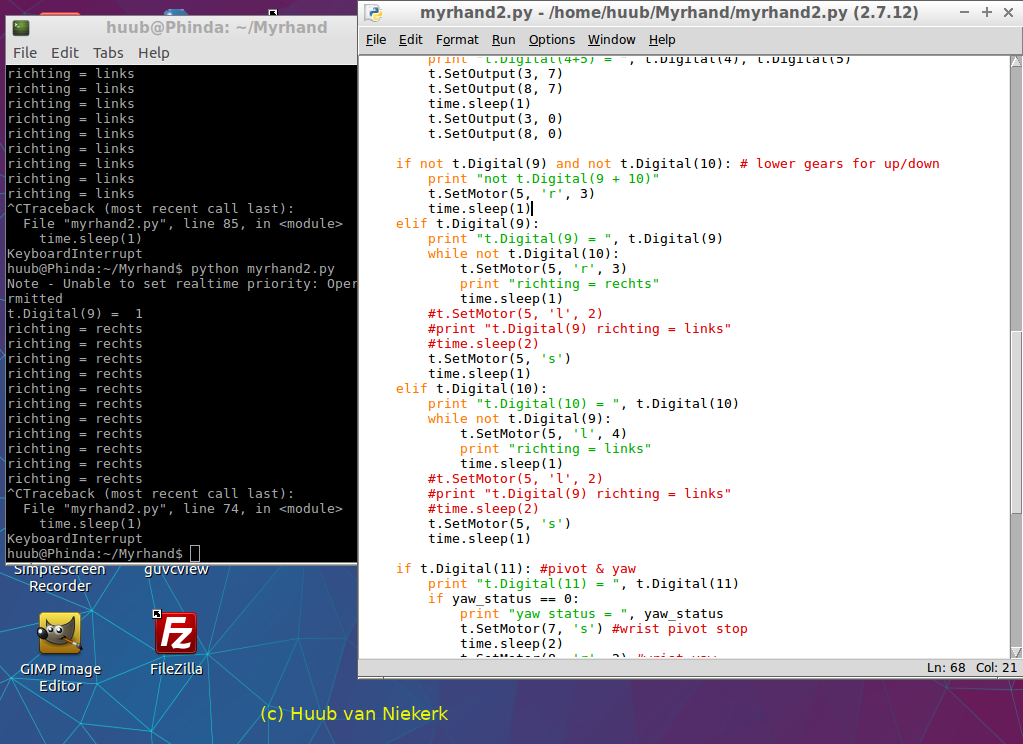
RaspberryPi: Trying I2C again: how does the test go? Then the question: are the LEDs ok? Using the fischertechnik power-controller gives a surprise. Does a reboot solve things? Click the image to watch the video.
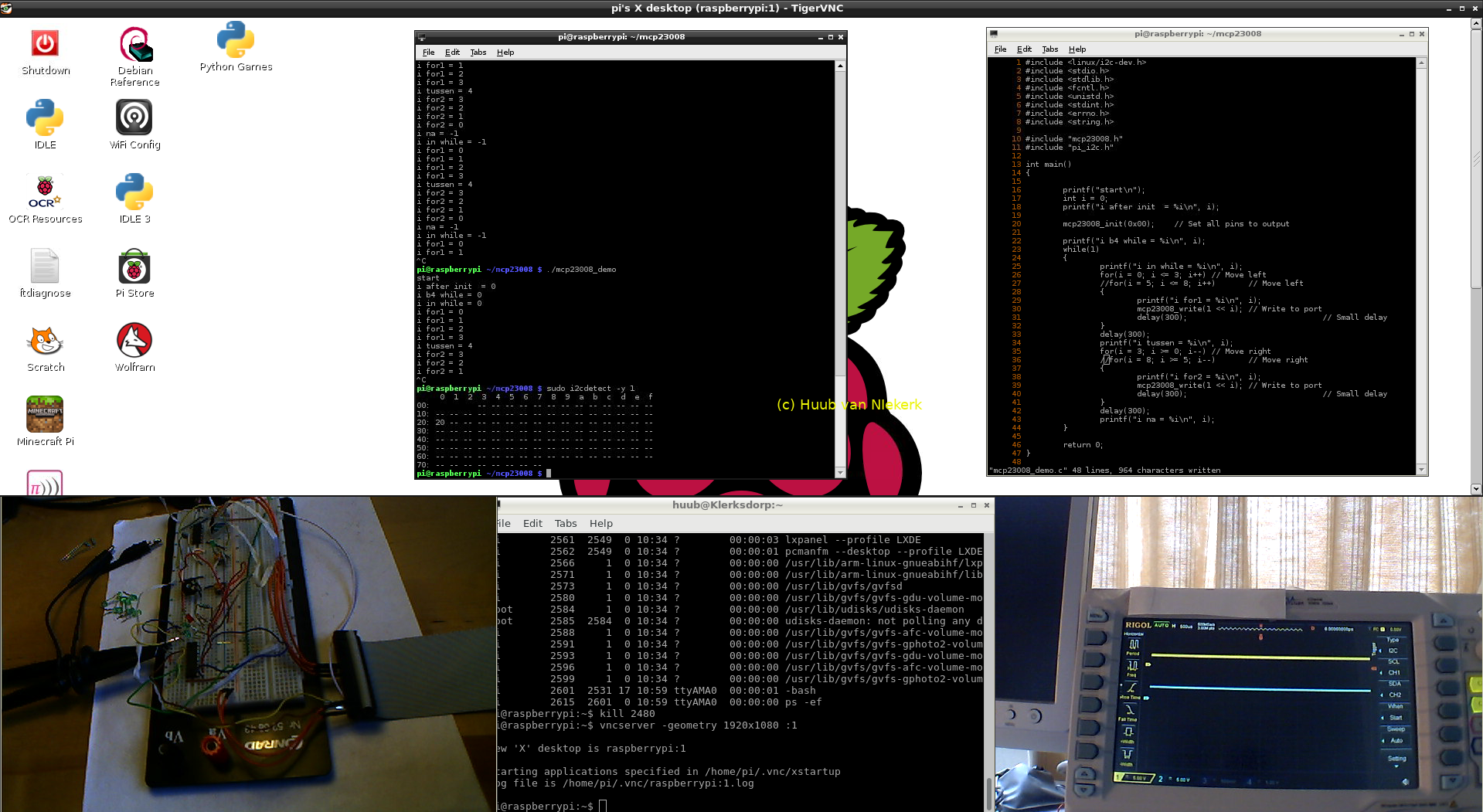
Mirft2: Starting with 2 power oopses prior to recording, I have another one. After fixing the battery voltage in the code, the voltage is clearly not the cause. What's up with the connection? What's wrong with the counters? OpenCV shows some nice pictures. Click the image to watch the video.
Mydfir: Testing the line following with an object further away, the colour seems ok. But the linefollowing strangely goes off. Using diagnostics, I find a condition issue in the software. Click the image to watch the video.
Arduino Yún: First, testing the fischertechnik mechatronics and wiring. Then: back to gathering data in C using an array. Why doesn't the file storage work? How to check if the array has data? Click the image to watch the video.
Discovery: Testing the counters and trajectory again, adding a check for voltage. What will happen this time? I'm in for a big surprise. But why does it happen? Click the image to watch the video.
Arduino MegaADK: Testing the sonar again, but with the odd results, I decide to replace it by another sensor. How does this work out? Is the signal reliable? How do the lamp and propeller influence it? Click the image to watch the video.
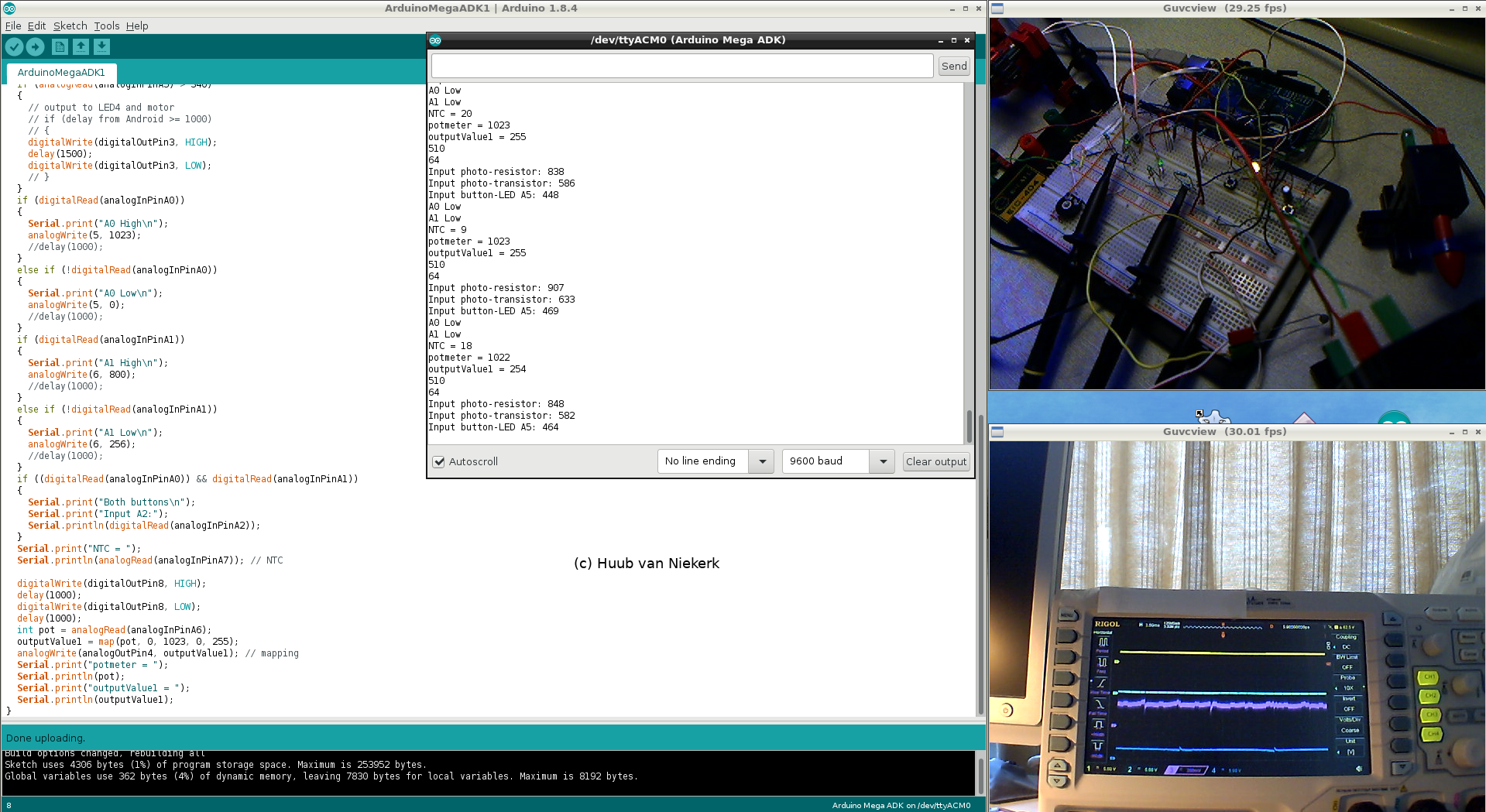
RaspberryPi2 & ROS: Focus this time is on the package 1 vs 2: can I change it so I get working packages? Using hints from the internet, I give it a try. Click the image to watch the video.
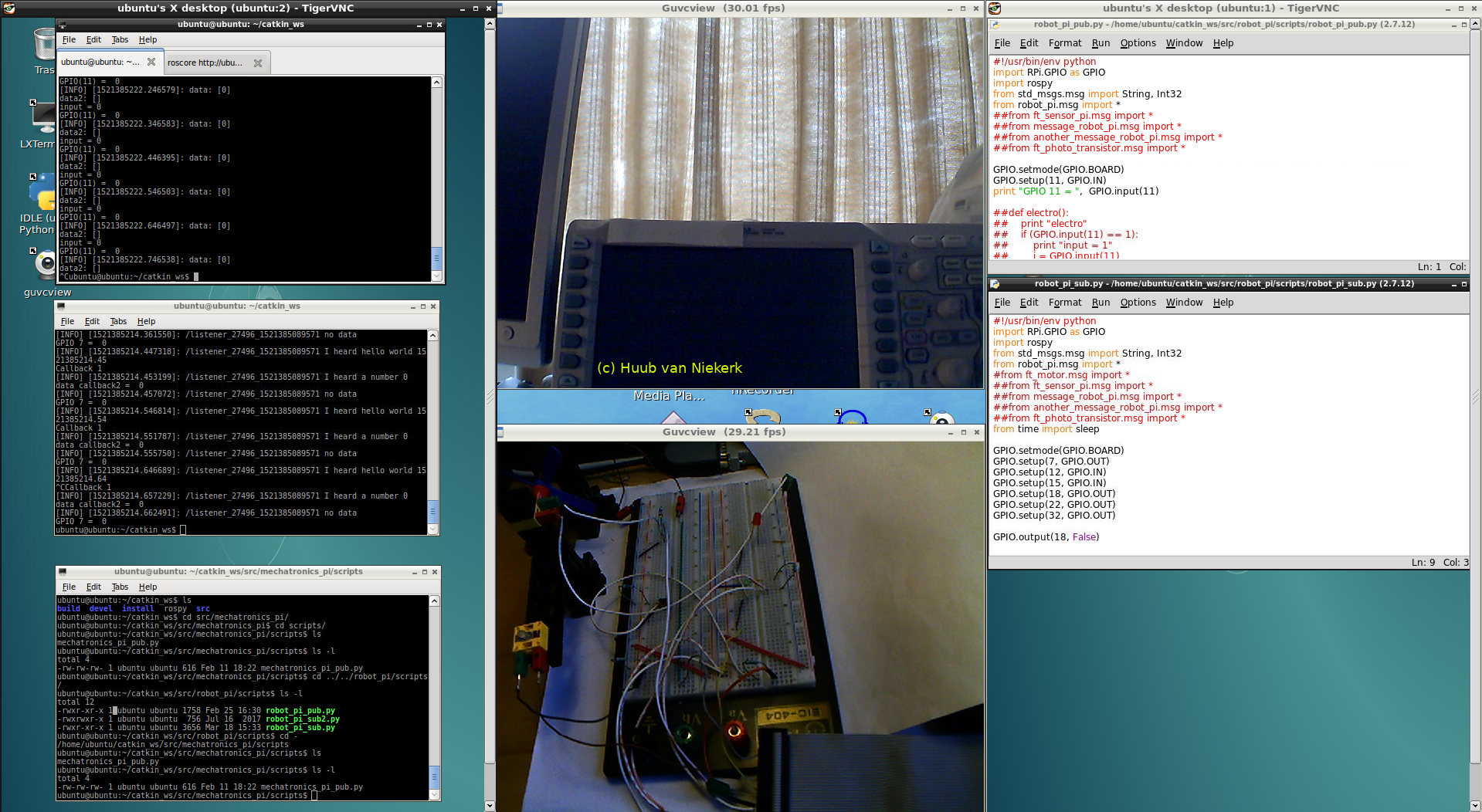
BeagleBoard & monorail: In a new attempt to find out what's wrong I try vaseline. But then it stops. So what's up? Close observation reveals something unexpected, but how to solve it? And another major oops. Click the image to watch the video.
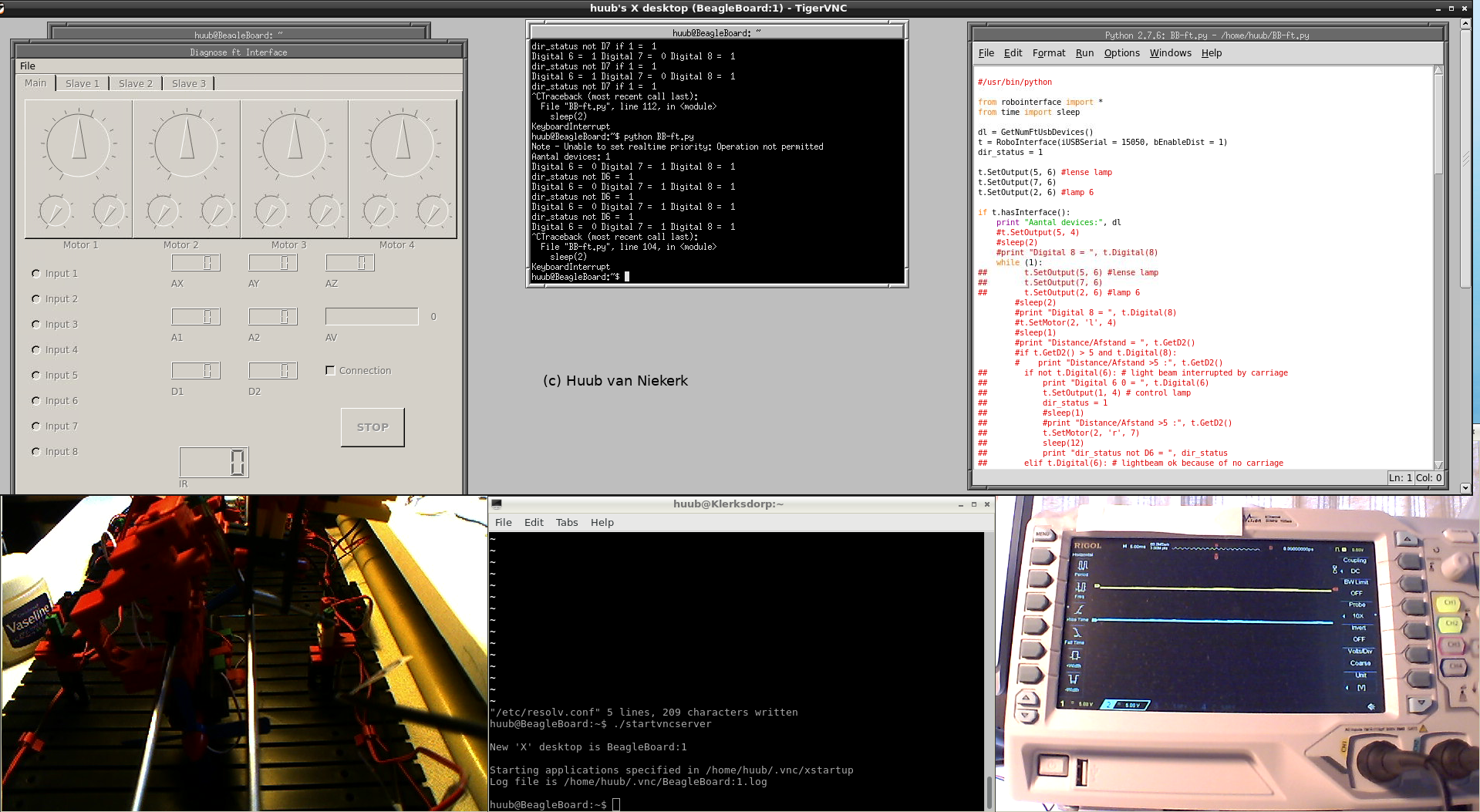
16 March
Arduino Mega2560: At the Uno: the replaced fischertechnik mechatronics needs a wiring fix. Then investigating SPDR issues again leads to some surprises. How to go on? Click the image to watch the video.
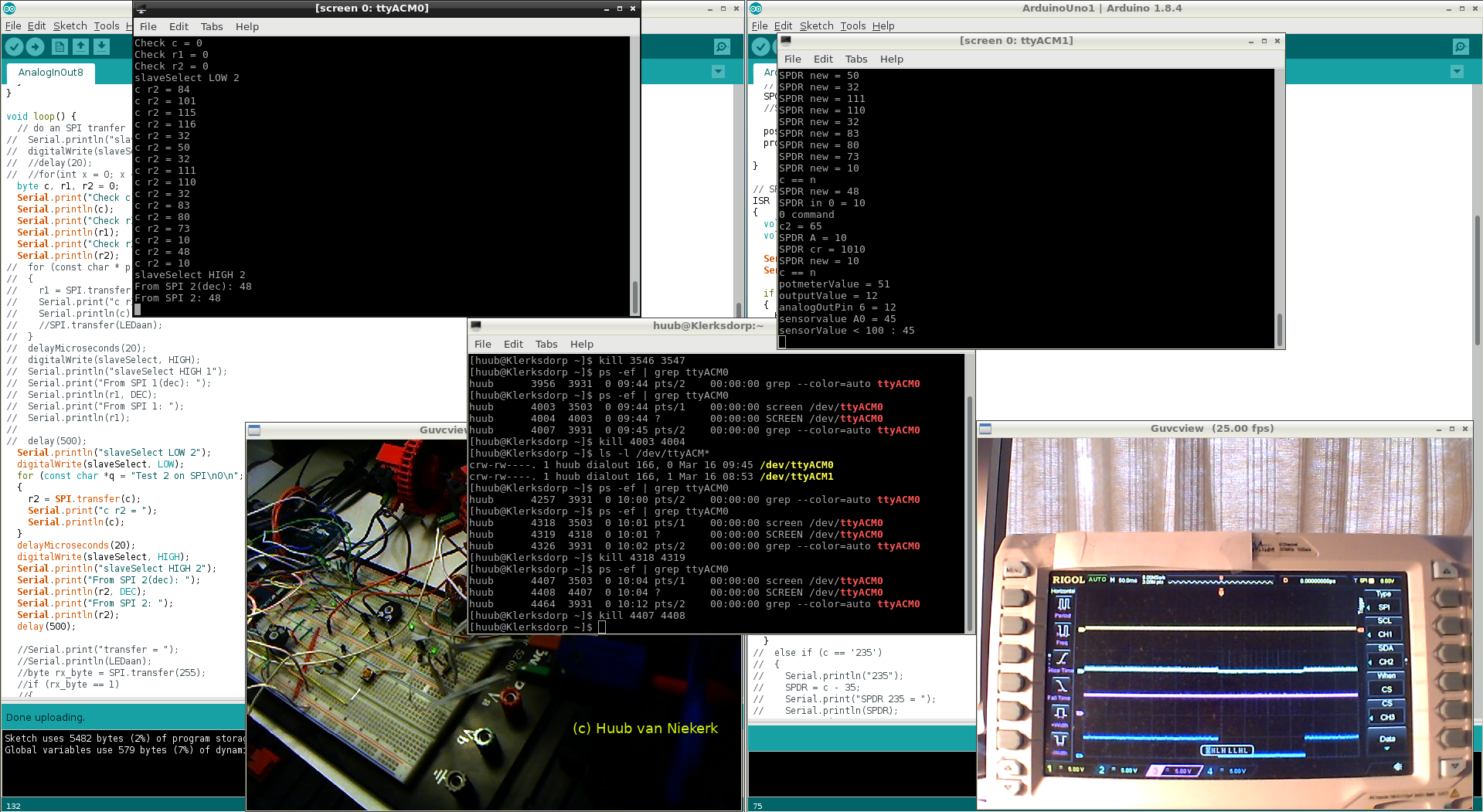
Hand: Testing reveals I need to add more counterweight... so I can lower the speed of the vertical gears. Of course this needs to be tested..with some unexpected results. Click the image to watch the video.
RaspberryPi: Trying I2C again: what do I still have to do? A test with an odd result, but why? An oops with wiring. Searching for the correct library, ends with what? Click the image to watch the video.
Mirft2: Testing the motors, gears and counters starts with an oops, then questions. Finally I find a wiring issue which solves a moving issue but is that the really solution? Click the image to watch the video.
Mydfir: Testing colour and sonar using just daylight gives some unexpected effects, one of which is an deterioration oops. But why is that lamp burning? Click the image to watch the video.
Arduino Yún: Changing a fischertechnik motor into mechatronics for data requires a complete , device oops. Click the image to watch the video.
Discovery: Continuing with distance and stopping the motors, I have to adjust the algorithm quite a bit. This leads to more reading out counts, and a few corrections for screenoutput. Ouch. Finally, I can test and then something else goes wrong. But why?! Click the image to watch the video.
Arduino MegaADK: Testing the mechatronics with the LDR, I find that the pwm is ok can the same be said of the chain? Will some playing with the tension give a clue? Then the sonar: after a code correction, I still get an odd value. Will playing with the wiring help? Click the image to watch the video?
RaspberryPi2 & ROS: Continuing to find the non-executable error leads to debugging and comparing packages and settings. Will anything work? Click the image to watch the video.
fischertechnik convention Hoofddorp 2018: Visiting the first convention of 2018 in NL, bringing 4 of my models: 2 riding, 1 walking and the arm. Unfortunately, the riding robot for colour and the arm were the only models that (kind of) worked. The others suffered from the wifi being overcrowded. So for the next convention, I really need a plan. I made videos and put them into this compilation. I also made a few pictures that will be published in the fischertechnikclub magazine.
9 March
Arduino Mega2560: Focus is again on SPI: strings, ASCII, timing. What works? How does it really work? When does SPDR give the correct values? Some very close observations. Click the image to watch the video.

Hand: Testing the algorithm again, and using the diagnose, I find the algorithm needs a change. Then a wiring issue shows up at the hand and a cord issue. How to resolve the motor wiring? Click the image to watch the video.
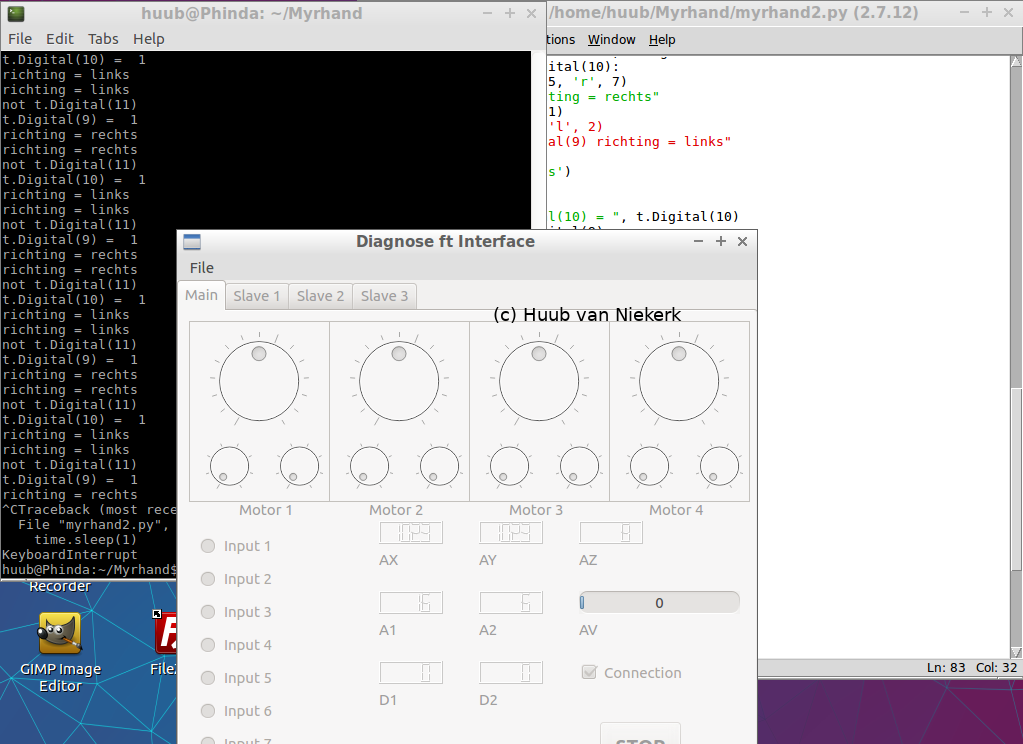
RaspberryPi: Focus is once again on I2C. Using this configuration info the question is does it work? Typos? Configuration files? Source code? In the end something works, but what? Click the image to watch the video.
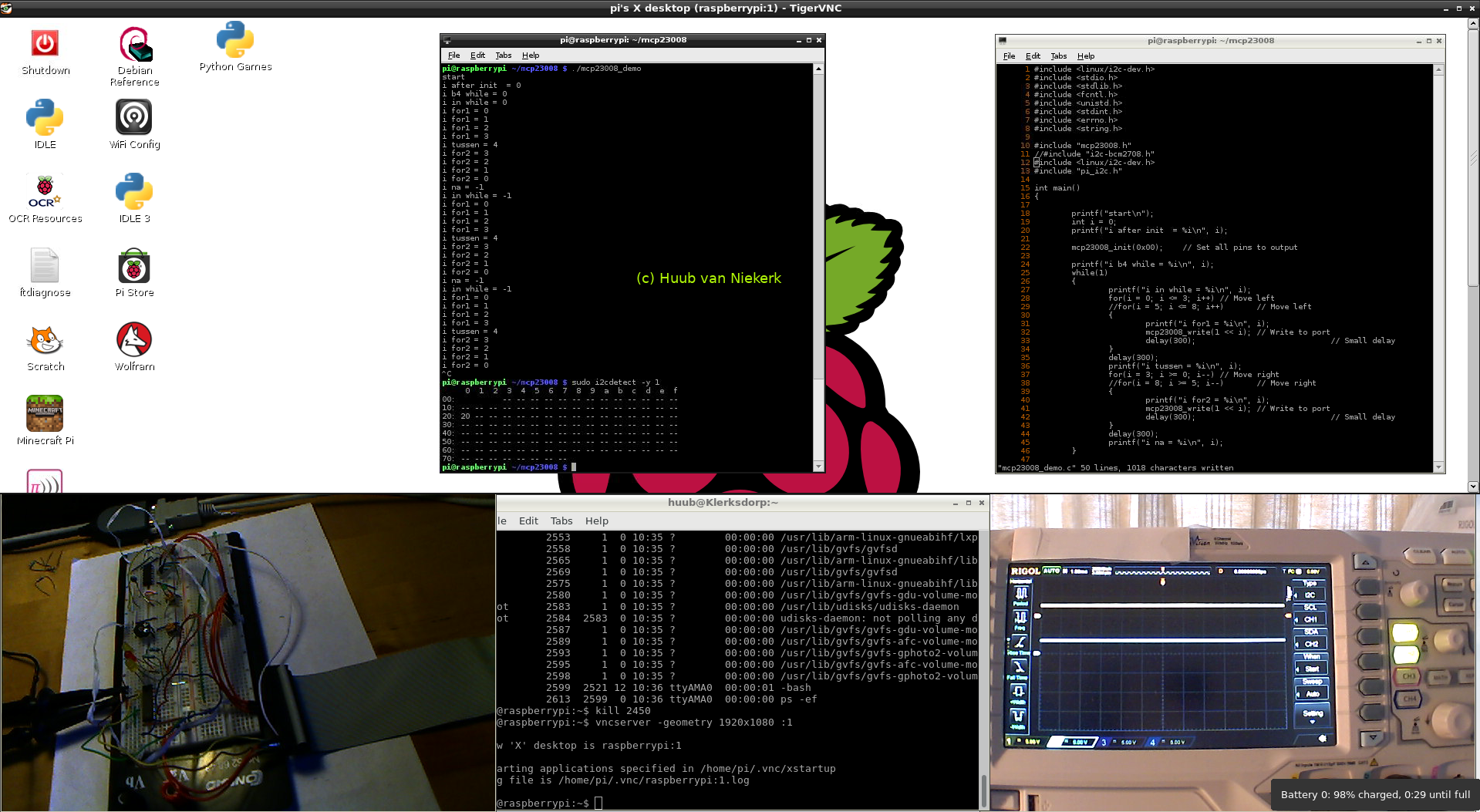
Arduino Yún: Since attempts to try getting data from sensors etc. in to Octave keep failing, maybe gnuplot is an option. This results in an insight that I really have to rewrite the data part of the algorithm. How will this go? No string but what? Click the image to watch the video.
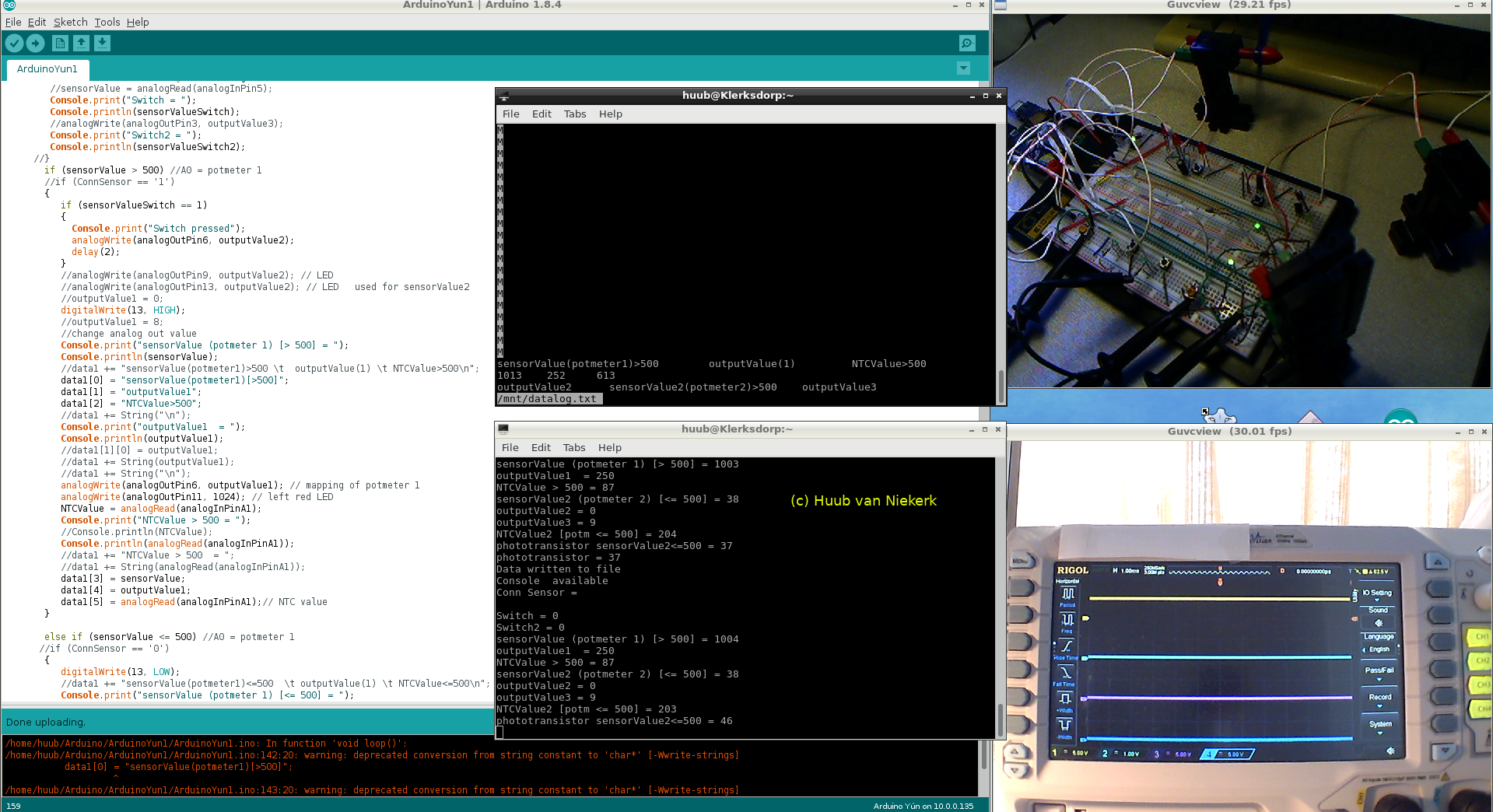
Discovery: Experiments with the motor counters again: leading to changes in the algorithm and more to come. Images support a conclusion and how does ROBOPro do? The actual runs give some surprises as well. Click the image to watch the video.
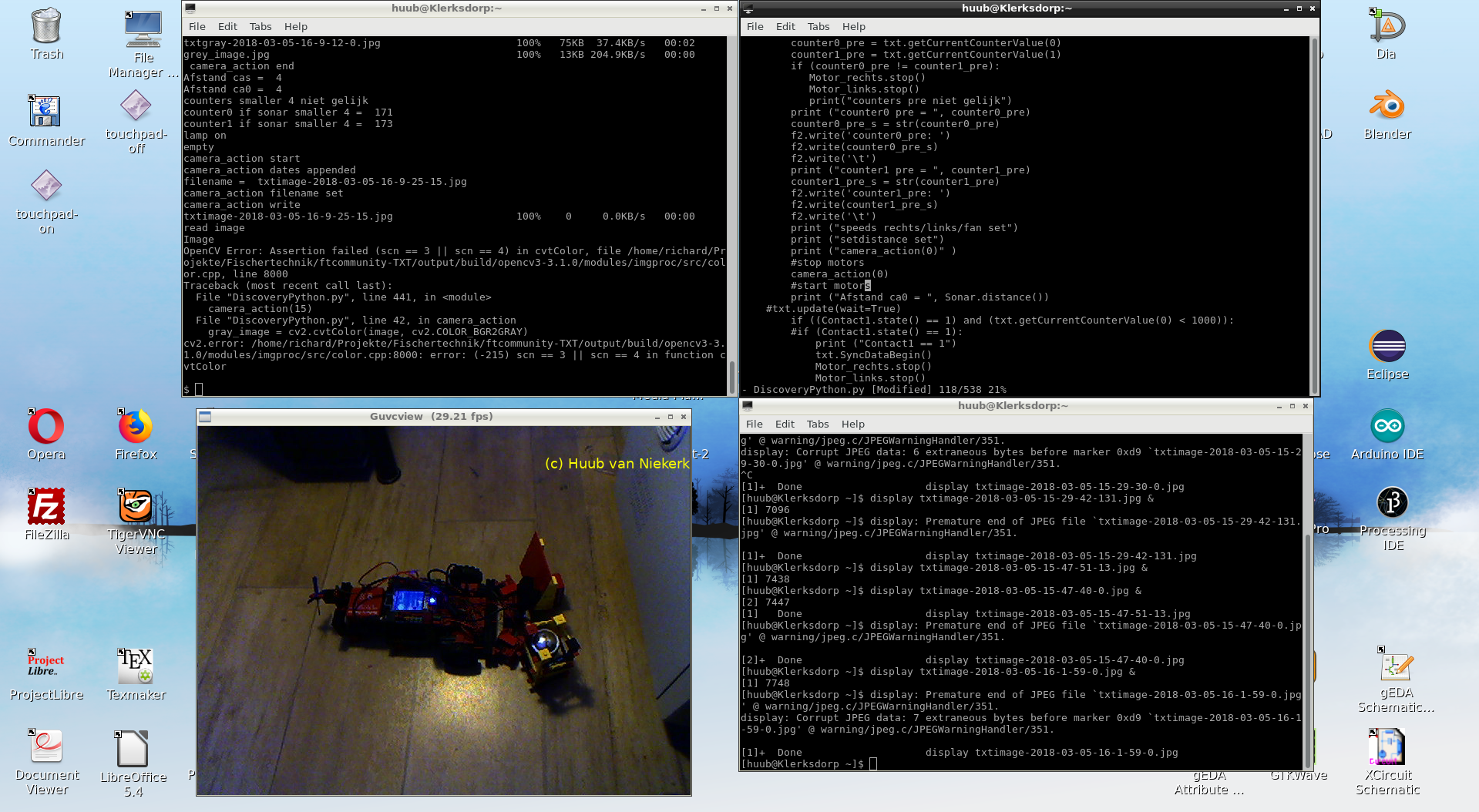
Arduino MegaADK: Another reconstruction of the chain mechatronics for the LDR, checking on the phototransistor/lamp with a remarkable finding and another sensor. Will it work? Click the image to watch the video.
RaspberryPi2 & ROS: Using 2 VNC windows again, cameras via the recording laptop. Starting a new package again, following tutorials: what does it bring? And how does old stuff work? Some surprises and some insights. Click the image to watch the video.
BeagleBoard & monorail: Another reconstruction to attempt to get and keep speed. Some improvement, but still mysteries in speed, location and more. Click the image to watch the video.
2 March
Arduino Mega2560: Again. the first focus is on the motors: the XM and XS are swapped and XM is removed. Now I have the switch back..which brings the focus to SPI. Using screen/monitor I find some very weird stuff, an explanation and that strings do work...somehow. Click the image to watch the video.
Hand: Last time, sensors weren't detected and motors didn't work. So time for a total checkout: wiring, motors and algorithm, even a hardware swap. But what's the result? Will things work now? Click the image to watch the video.
RaspberryPi: Trying to get I2C working and getting a signal on the oscilloscope. Some code-blindness, fixing the makefile, C file and a reminder about RPi configuration. Will it work? Click the image to watch the video.
Mirft2: During wlking, comparing counters, doing a reset using ROBOPro. Can this be done different? What's the spanning distance? What's the voltage? A change in algorithm. Click the image to watch the video.
Mydfir: Continuing on all options, where will it go wrongt this time? Soon, I find enough of that. Time to adjust the algorithm a bit, but does that help? Click the image to watch the video.
Arduino Yún: Trying Octave again meets with syntax errors and conflicting info. How to go on? Also: the fischertechnik phototransistor with lamp: how should it do? Click the image to watch the video.
Discovery: Continuing with the counters, it goes wrong sooner than expected. After recovery, the algorithm needs a change..after which answers come but more questions as well. Click the image to watch the video.
Arduino MegaADK: Continuing with the XS motor to improve to construction...which results in a reconstruction. Does it work? Click the image to watch the video.
RaspberryPi2 & ROS: Using a differemce VNC setup to use camera and microphone, I keep on debugging for something that should be executable. Will it work out? Click the image to watch the video.
BeagleBoard & monorail: Trying out a new brush contact but it needs some adjustment and tinkering which leads to another reconstruction. Will it work? Will the carriage gain speed now? Click the image to watch the video.
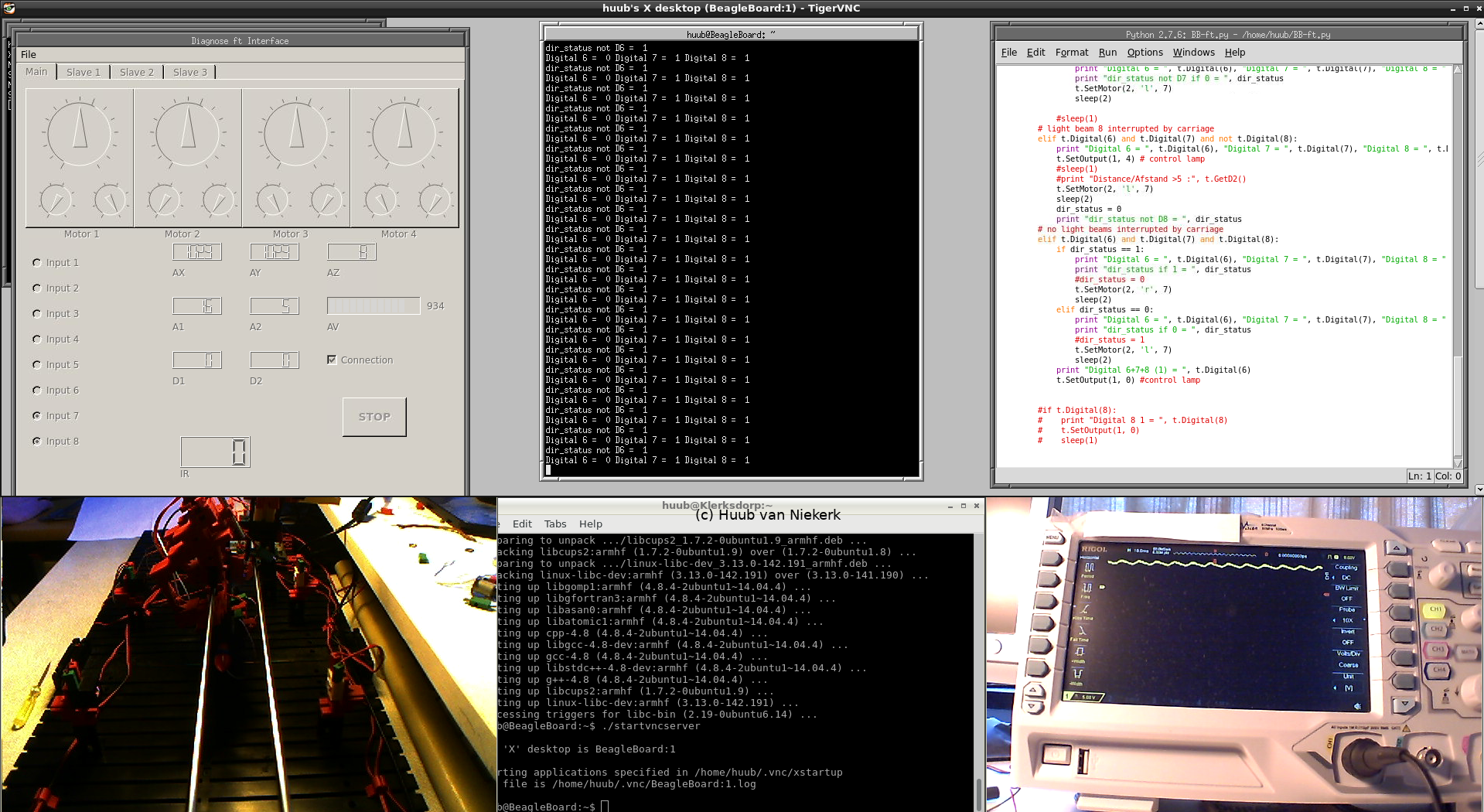
23 February
Arduino Mega2560: First focus on the fischertechnik motor: how does it run, how is it wired. Then SPI: when does the string pass on screen? What's the value? What's the difference between screen & monitor? How about the oscilloscope? Click the image to watch the video.
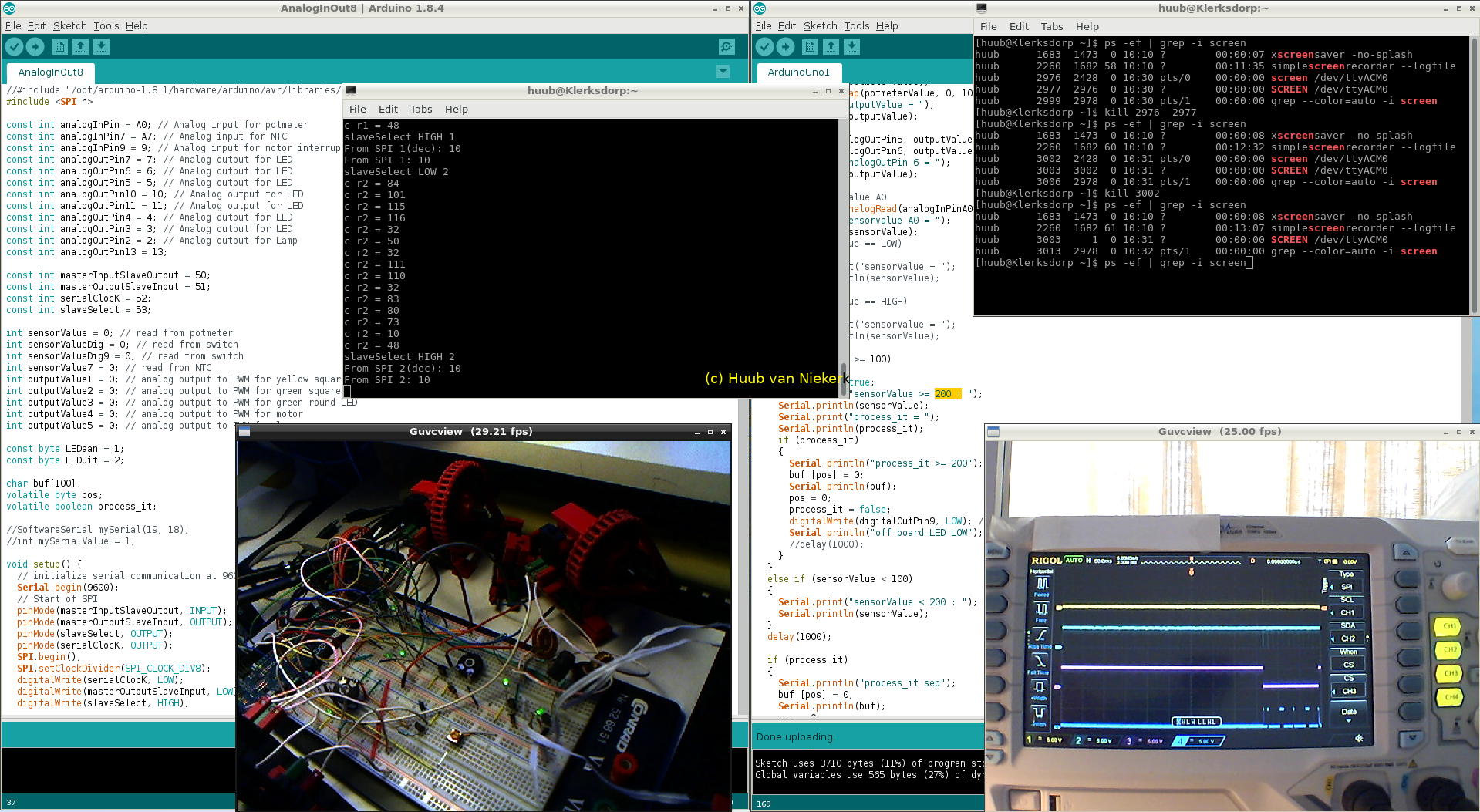
Hand: Observing the wrist yaw switch, things are good in distance and timing. Motors don't work, what's up? Diagnose shows wiring issues and the code needs a change. Not to ruin anything, step-by-step going forward. Click the image to watch the video.
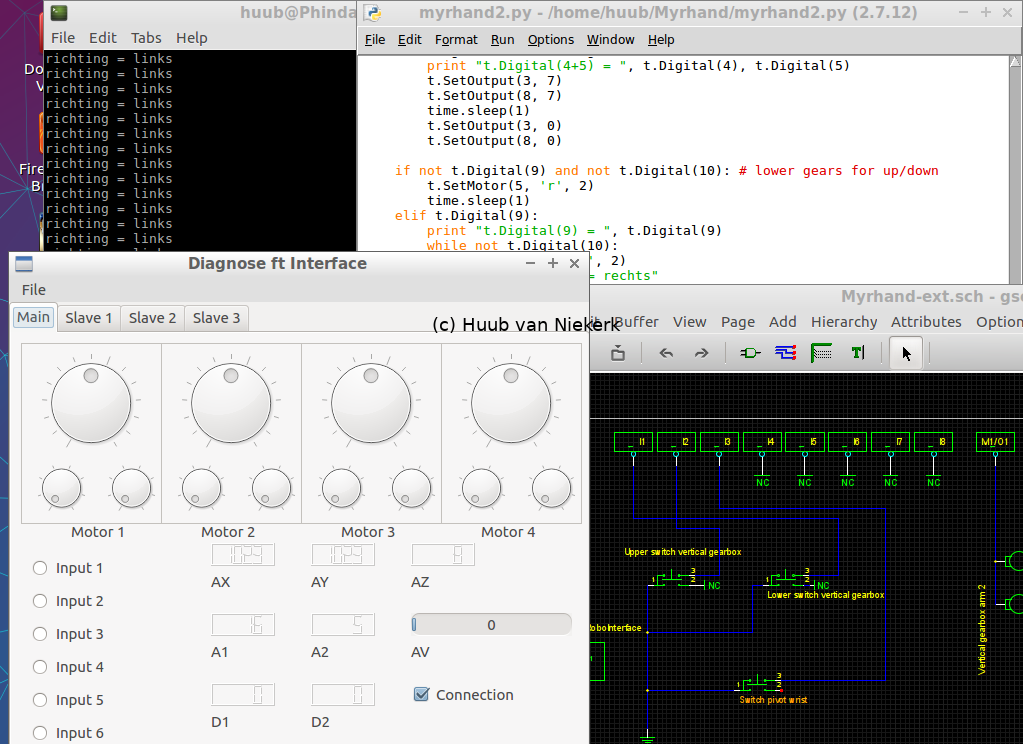
RaspberryPi: Trying to get the I2C working, I look for more #include options and makefile changes. Then I find things change over time and small errors can have big consequences. Will it work? Click the image to watch the video.
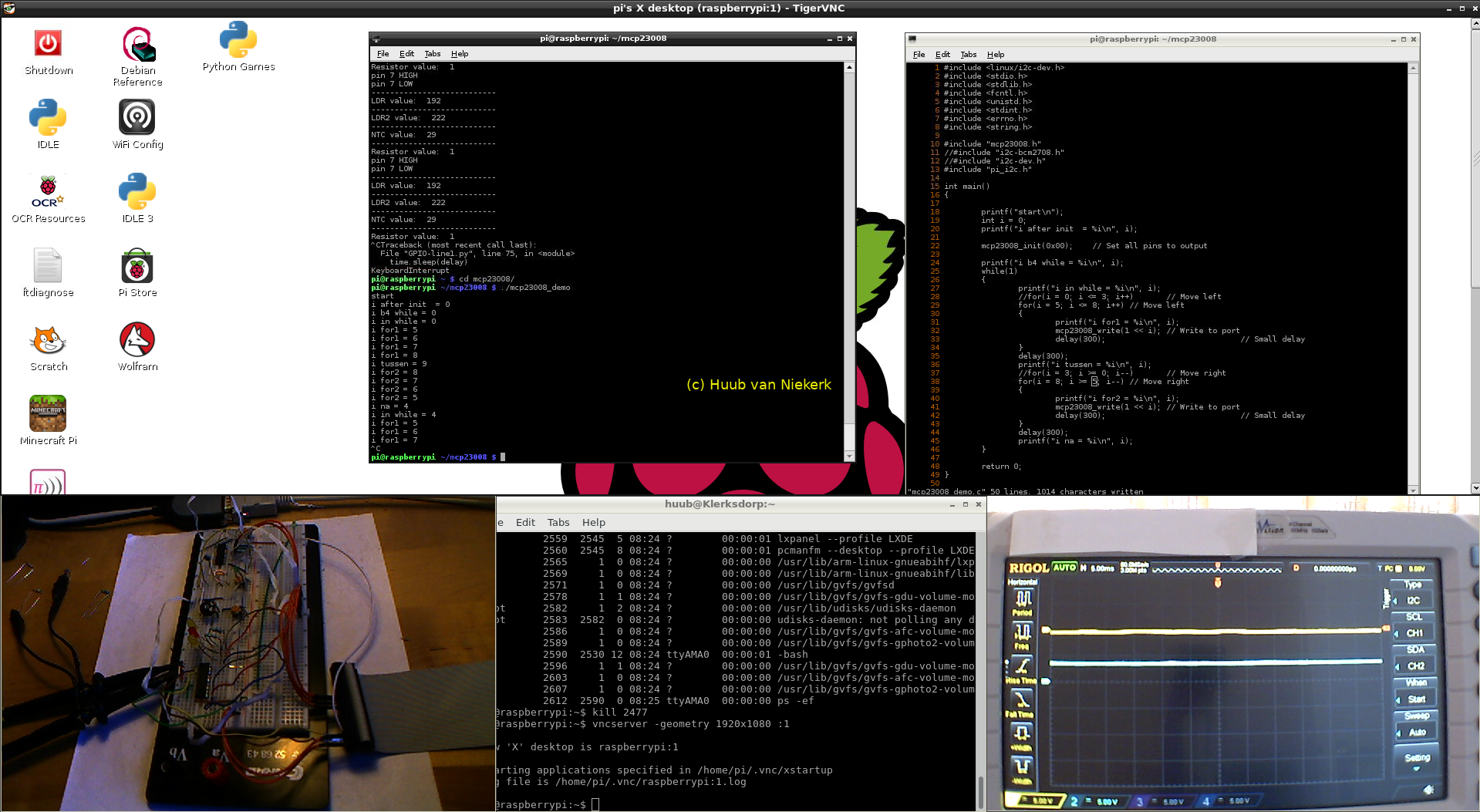
Mirft2: With 2 rubber feet, another test with some problems. What's up? Gears? Software? In comes ROBOPro for testing: cw, ccw, counters. What works? What doesn't? Then something weird and an oops. Click the image to watch the video.
Mydfir: With colour, sonar and linefollowing all active, what's the result? The algorithm has to be adapted and the colour-calibration has to be done. Some surprises in the data file. Click the image to watch the video.
Arduino Yun: Testing all and getting further on Octave. Some errors, but why? Then the lamp, why does it behave like that? Rewiring? Click the image to watch the video.
Discovery: After loweringthe speed, the number of images is still low. Also, why the trajectory diversion? Changes to the code to compare motor pulsecounts: does it help? And why are some images 0? Click the image to watch the video.
Arduino MegaADK: Testing it all, and making a minor mistake and discovering a wire issue. Then a new idea: modifying a motor to deal with the fischertechnik LDR. This also requires another change. Click the image to watch the video.
RaspberryPi2 & ROS: First some testing results in rewiring. Then new attempts to make the new package run result in debugging and comparing files leaving questions. Click the image to watch the video.
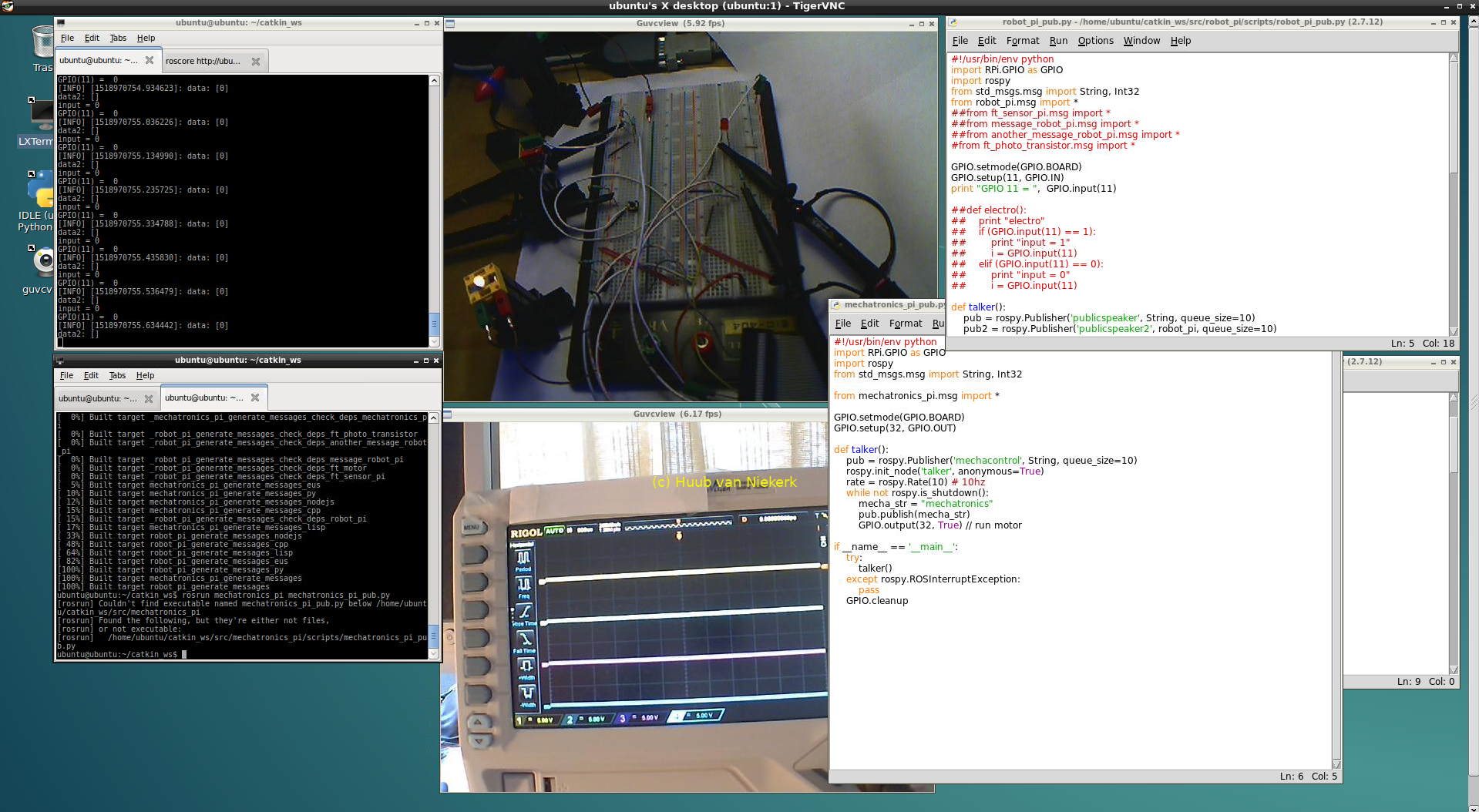
BeagleBoard & monorail: New attempts to improve the speed results in some modifications. Will they work out? Do diagnose and the algorithm give different results? Click the image to watch the video.
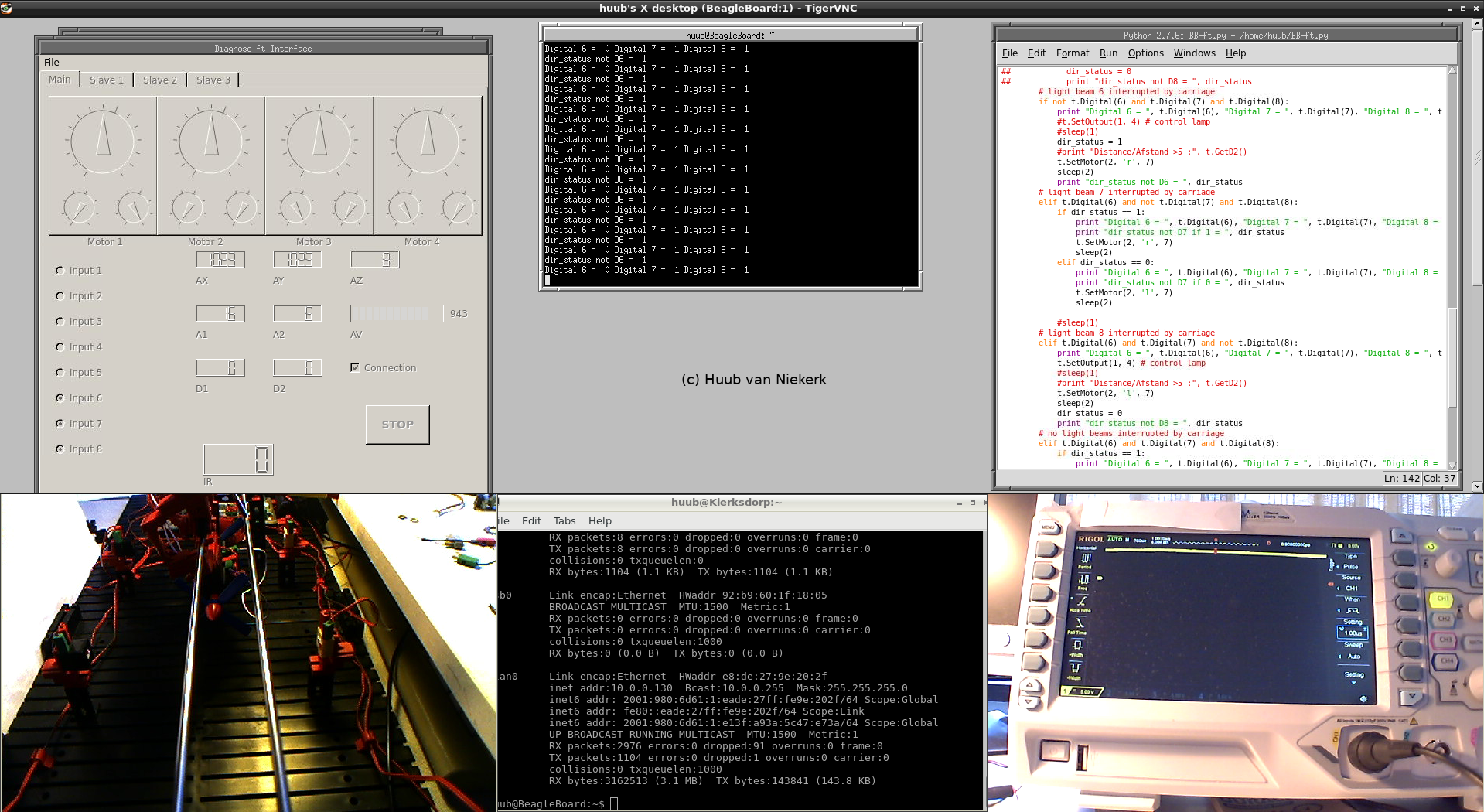
16 February
Arduino Mega2560: In an attempt to get a motor running on the Uno, I replace the XM motor. Will this finally work? And how? Then for testing the SPI string, the serial monitor is back to 1 only. Searching for a solution, I find a replacement. Does this have the same effect on the signals? Click the image to watch the video.
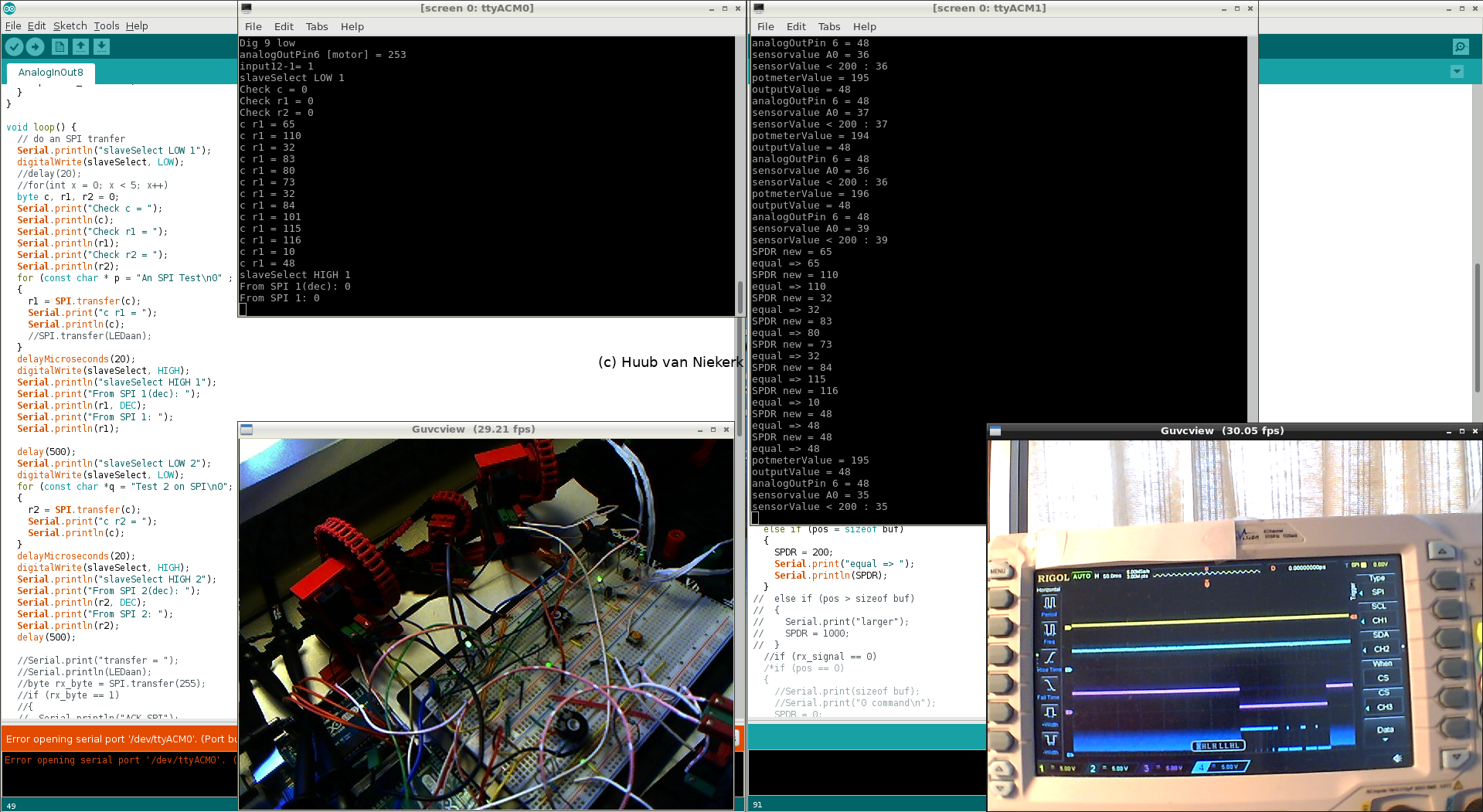
Hand: Focus is on figuring out the responses of the sensors: why are some gears interrupted? Will changing the algorithm bring a solution? Click the image to watch the video.
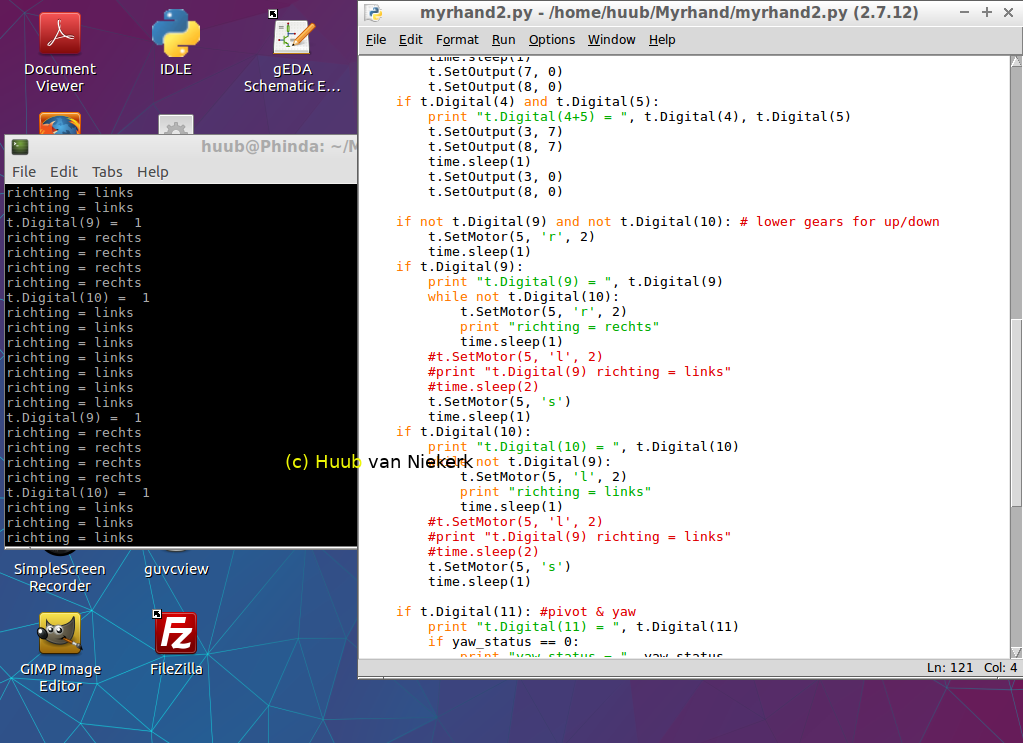
RaspberryPi: Going further on I2C, I find that the example algorithm has some flaws. In my attempt to correct them, I find catch myself mixing up things a bit. In the end, the algorihtm works, but does the hardware? What about signals on the oscilloscope? What about wiring? Click the image to watch the video.
Mirft2: Trying to walk again, but it starts with an oops and ends with an oops. Why does it "prance"? Why does it stop? How do the feet go? Click the image to watch the video.
Mydfir: Testing sonar and line following gives some weird as well as interesting data. Why happens what? Out of curiosity, I enable colours and find some oddities. What's happening here? Click the image to watch the video.
Arduino Yún: Back to recording data using Linux and getting them into Octave. After testing the hardware and examining the output, some error remains but the solution is clear. Click the image to watch the video.
Discovery: So 2 images taken, at the beginning and at the end. Too much code? Too slow CPU? Too much speed? Some testing and observing the output feeds a decision with a remarkable result. Click the image to watch the video.
Arduino MegaADK: So how about the motor with chain? After testing the electronic control, I find I need to replace part of it. Some more testing leads to another replacement with a result that leaves some questions. Click the image to watch the video.
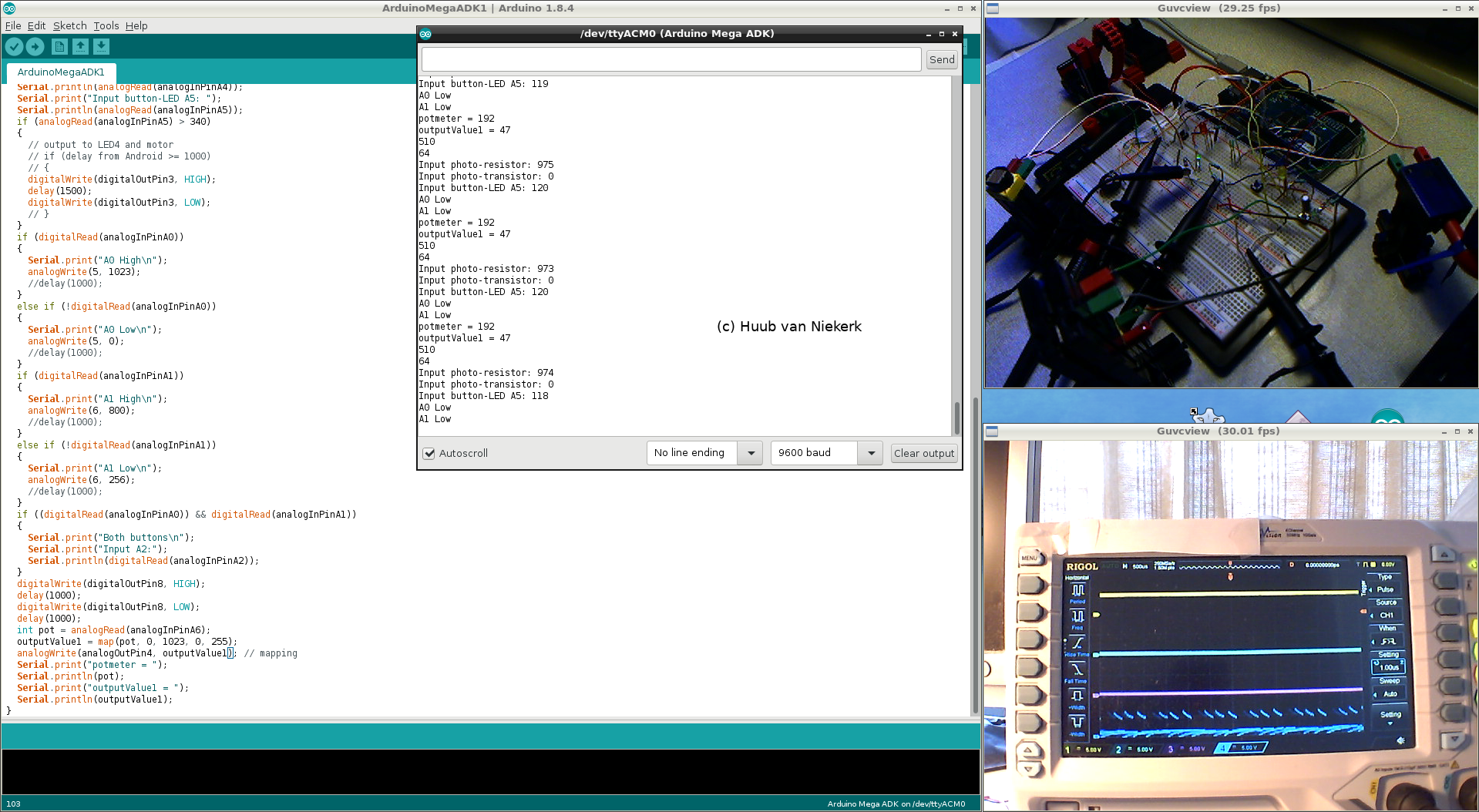
RaspberryPi2 & ROS: Trying to get it working again and testing it all. What works? What doesn't and why? Some debugging and trying delivers some renewal of experience but also questions. Click the image to watch the video.
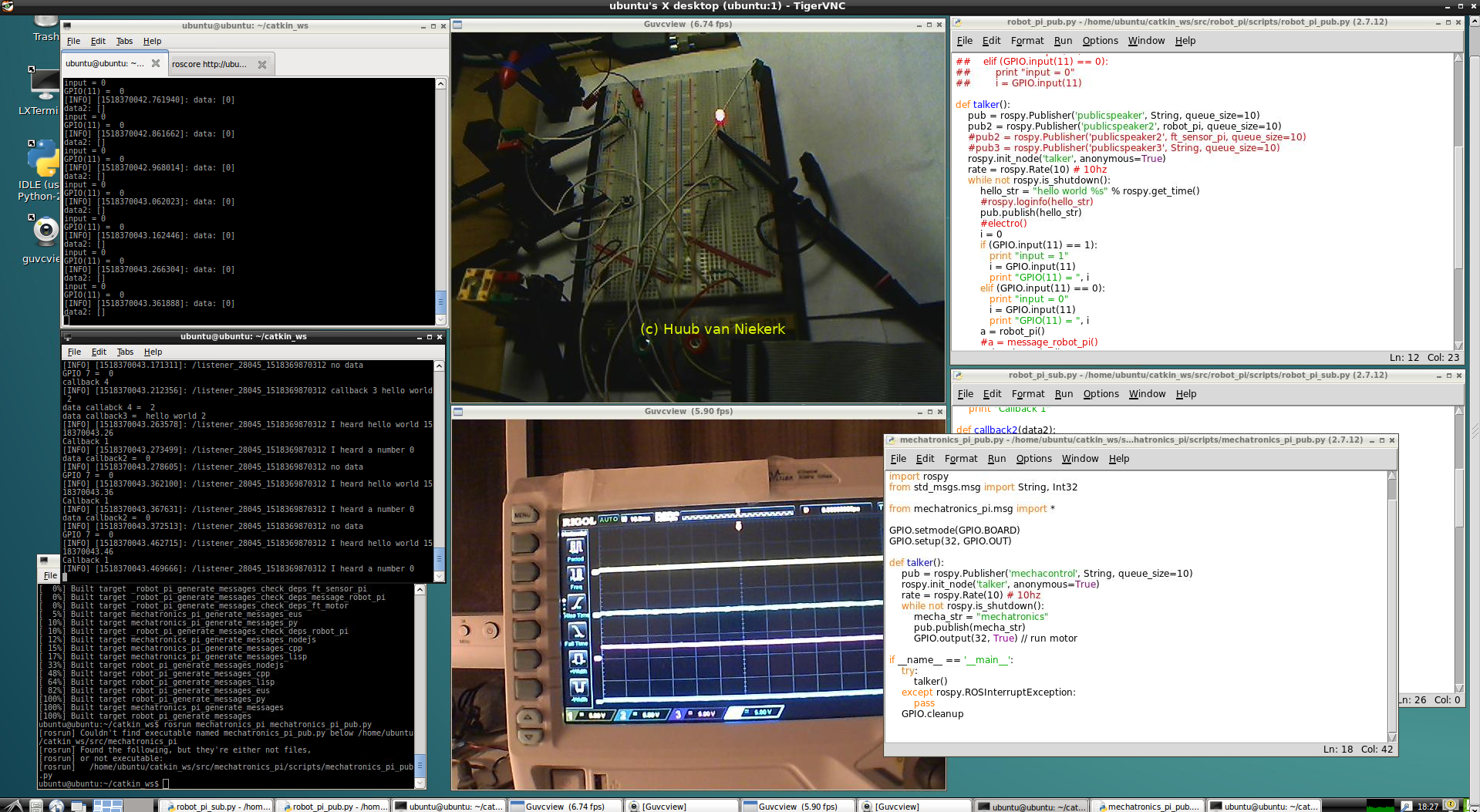
BeagleBoard & monorail: Trying the tracks, I have to make sure they're really parallel. So some modification and reconstruction. Then testing: something very odd with a sensor. How come? Also, halting at a strange place. Why? Click the image to watch the video.
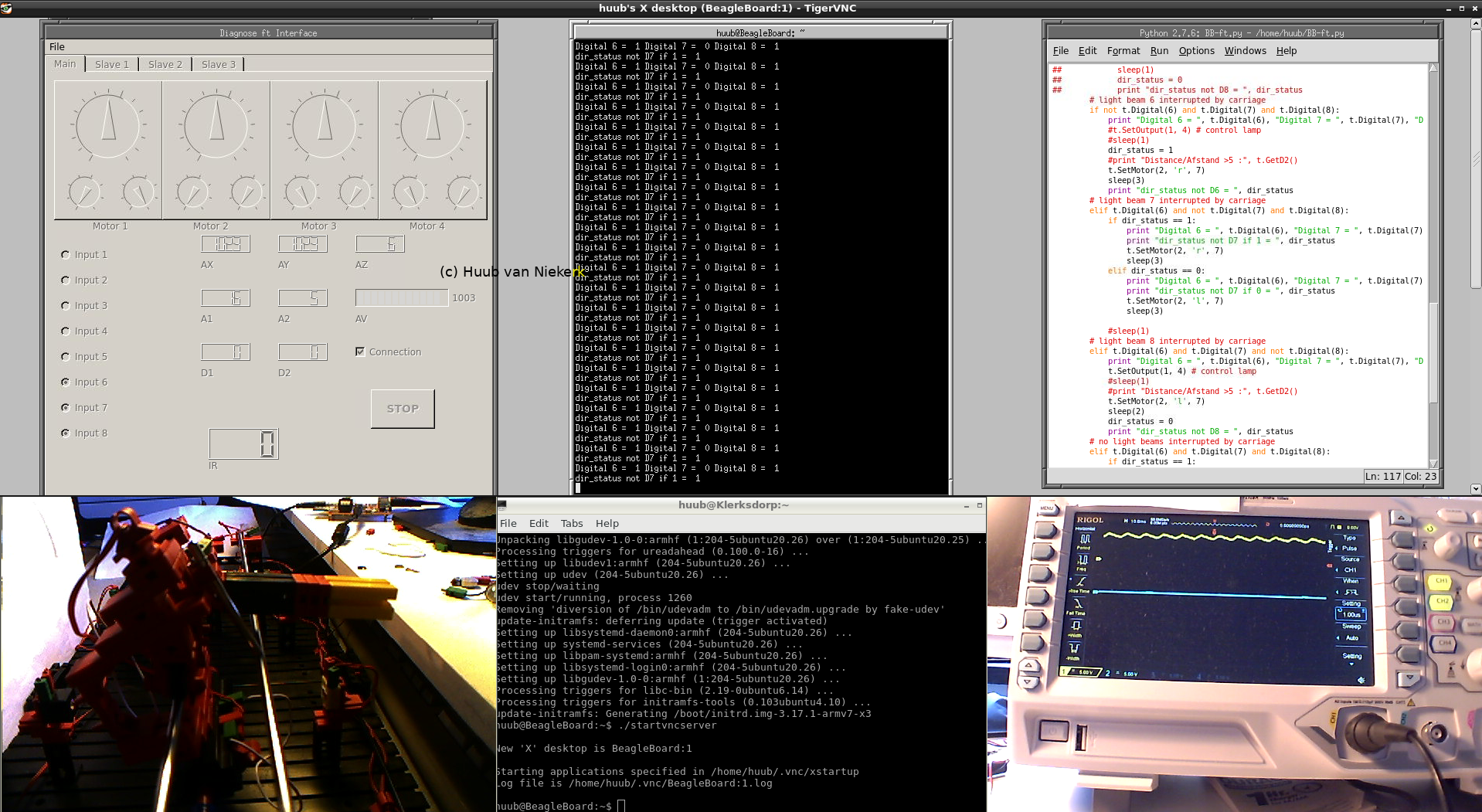
9 February
Mega2560: First focus: the motor attached to the Uno. How can it be solved? Other motor? Other value? Other port? Then: SPI. The strings seem to have gone, but why? Also it turns out I have 2 serial monitors, which makes checking out easier. Close observation with the monitor reveals not only about SPDR but also about signals on the oscilloscope in certain circumstances. Click the image to watch the video.
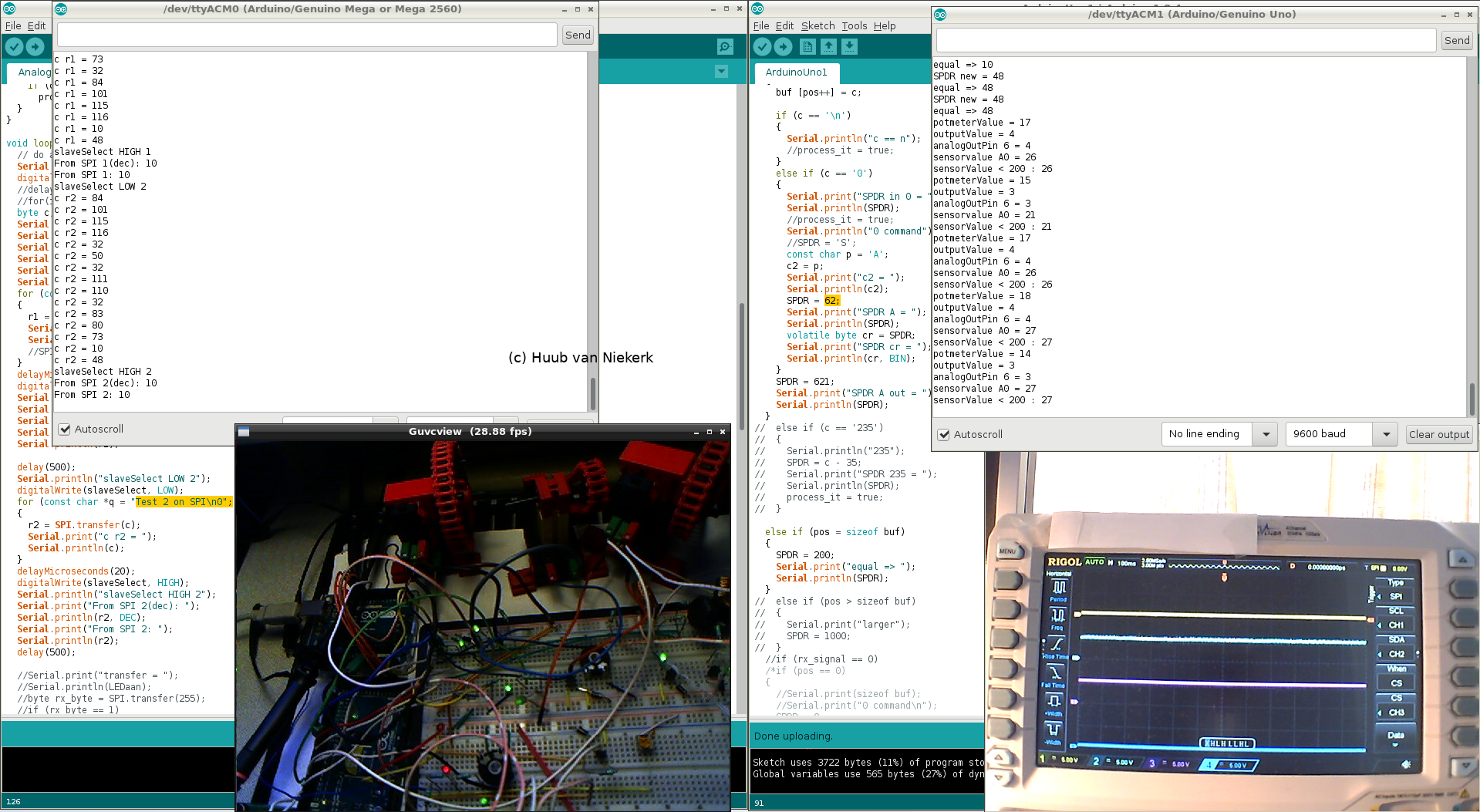
Hand: Testing the yaw of the hand again with close observation. It becomes clear that a motor is unhinged, but after that: what's wrong? Timing? Cord? Tension? Using the hand as test case it becomes clear that there's more to it. Click the image to watch the video.
RaspberryPi: Returning to the ADC with LDR for a moment to check its values. Does it work? Then a new subject: I2C. What does it need? How does it work? How do I program it? Click the image to watch the video.
Mydfir: Trying out sonar, it first goes on linefollowing. Then: 2 objects and reaction of the robot leads to thinking about timing. Also, the collected data shows some oddities. Are the distances really accurate? Some doubts are justified. Click the image to watch the video.
Arduino Yún: Again: data. Can I get it into a table for Octave? Can I delete the data file? Some surprises on the way to a solution. What works? What won't? Click the image to watch the video.
Discovery: Testing sensors, sonar, timing and OpenCV on the floor. As an extra, I put the camera image live on the controller display. What are the results? What should be changed? Reviewing images reveals a necessity to change the algorithm. But will this work out? Click the image to watch the video.
Arduino MegaADK: Why doesn't a motor work? Checking wiring and code. Swapping, from analog to digital and back...what are the results? Then a lamp..wiring or voltage? Back to the motor: voltage or pwm? Click the image to watch the video.
RaspberryPi2 & ROS: After last time, I'm curious why the build of the new packages goes wrong. But something else goes wrong before I can check. What's up? Why? History repeating, it seems. Click the image to watch the video.
BeagleBoard & monorail: First, the focus is on the rails/tracks. They seem a bit off. Then, would adding some weight to the carriage help? Some speed change is observed, but will it keep up? Click the image to watch the video.
2 February
Arduino Mega2560: First focussing on the motor: why doesn't it work? Pwm value? Wiring? Swapping wires? Then SPI. After a discussion, I decide to change the algorithm a bit and change a byte. The result is somewhat surprising, but not consistent. And showing another problem as well: info is garbled. Click the image to watch the video.
Hand: Trying to get the yaw working, I find some oddities in the construction. Observation brings more problems to the surface and questions about the software. Although improved, more has to be done. Click the image to watch the video.
RaspberryPi: Testing the ADC with the potmeter as analog source requires a modification and a tool. The result is somewhat surprising. Then another surprise on an LDR. What's up? Click the image to watch the video.
Mirft2: First testing on the oscilloscope, then on the floor. What's wrong with the object? What's wrong with the motors? ROBOPro is there to test and find out that things aren't that easy. Click the image to watch the video.
Arduino Yún: First testing, then: how does the data behave? Is the logfile correct this time? Changing the way the data is written should be different, how does that work out? Octave shows a message that may give a problem with the logfile. Click the image to watch the video.
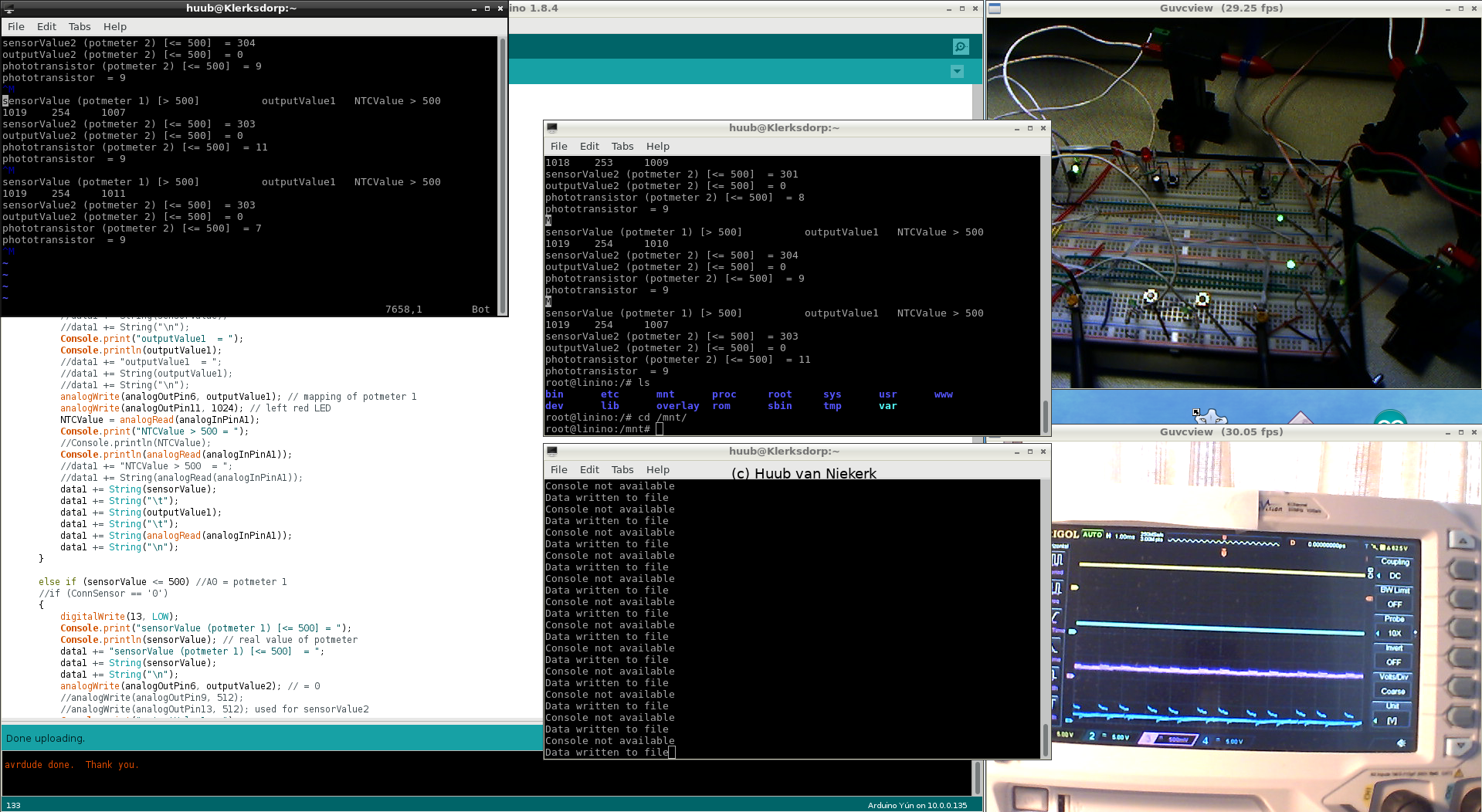
Arduino MegaADK: Time to get the motor with chain working. To get this done, it helps when the wiring is complete and when the code is correct. Does the motor work? In all circumstances? Click the image to watch the video.
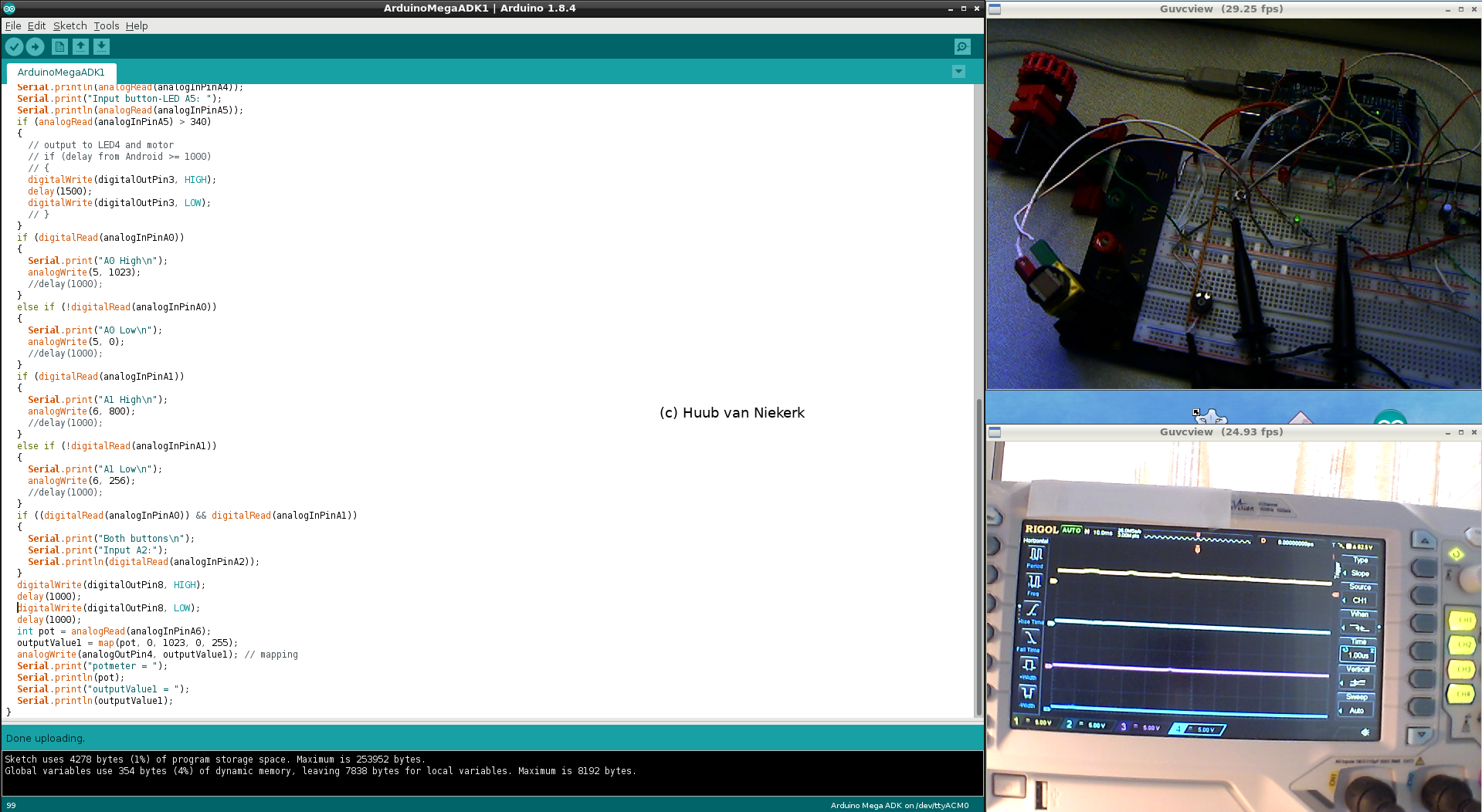
RaspberryPi2 & ROS: Testing and creating a new package. How will this go? Using the tutorial, it should go smooth, but mistakes happen easily. Let's try anyway. Click the image to watch the video.
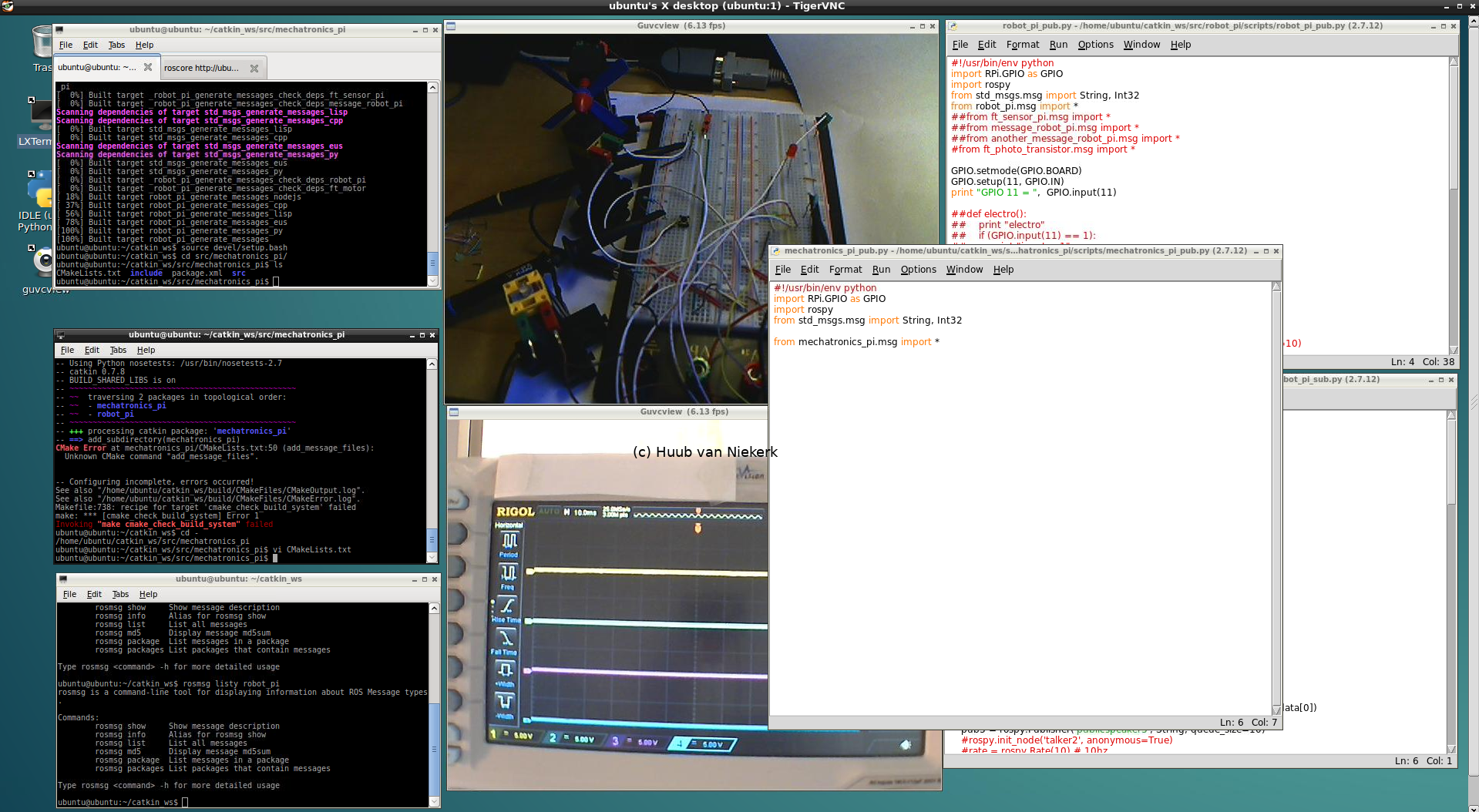
BeagleBoard & monorail: After advise to tighten to wire connections, I try again. Will this help? The oscilloscope show the familiar signals. Does the new track give improvements? Then 2 oopses and 1 reconstruction to come. Click the image to watch the video.
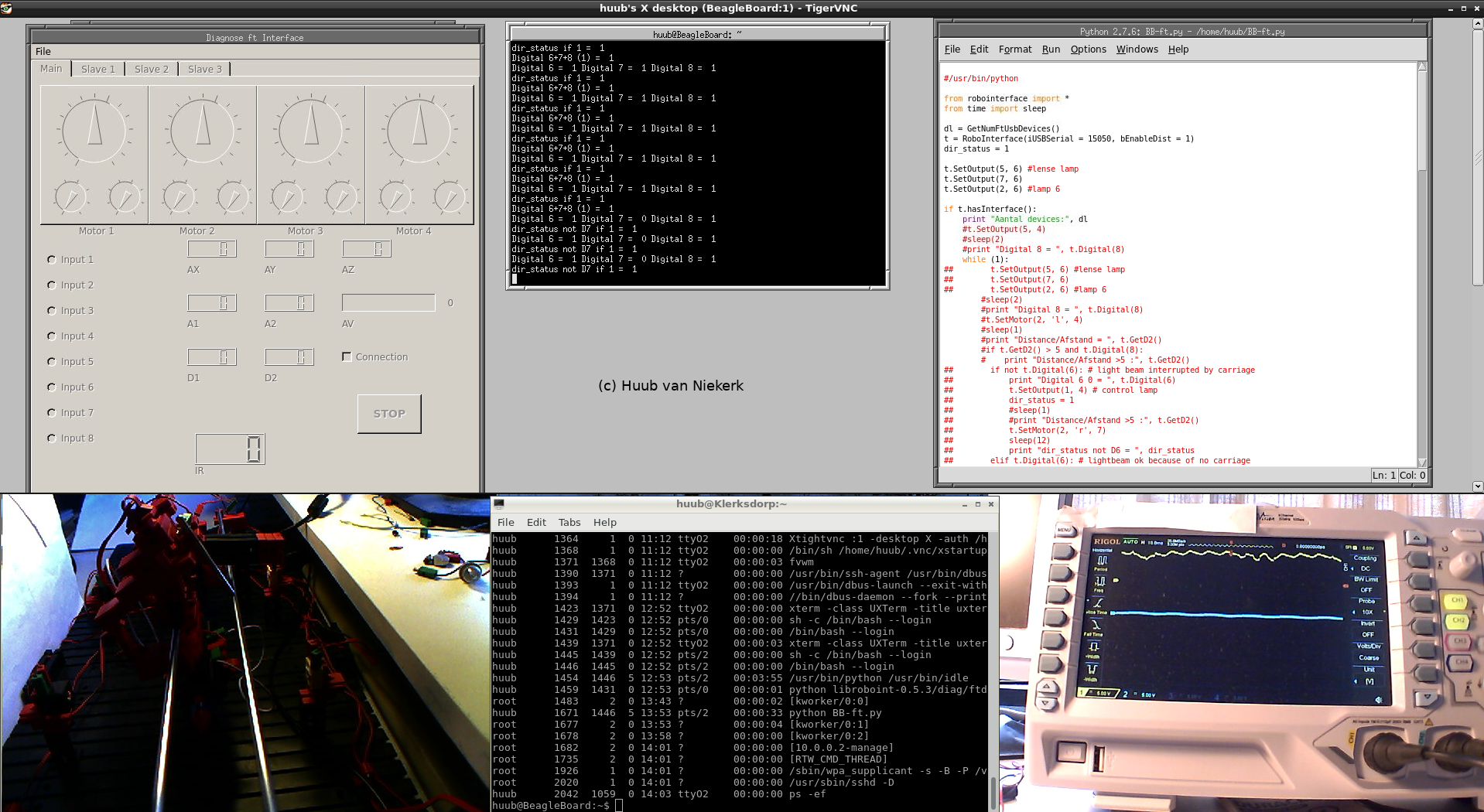
26 January
Arduino Mega2560: Starting with the Uno and SPI, the number from SPDR is stranger by the time. Then: why does the motor not respond? Some wiring tricks reveal a very odd situation. But how to solve it? Click the image to watch the video.
Hand: With the yaw still not working nice, I find the first test going wrong on the wrist. This needs a modification. After that, some odd findings. But why? Timing? Construction? Wiring? Click the image to watch the video.
RaspberryPi: Testing the ADC which still seems to go well. So how can I extend the setup when I don't have any more sensors? First, clean up the board, then place the components. Also: adjust the program and testing the new situation does bring a suprise. How come? Finally, updating gEDA. Click the image to watch the video.
Mirft2: It starts with a wrong screen, somewhere followed by a power off. Sigh. Then back to sensors. with oscilloscope. In finally find that ROBOPro is correct all the way, so where's the 0-1-2 counting gone? Finally, back on the floor. Something has to change. Click the image to watch the video.
Mydfir: Trying sonar again: what goes wrong? Why? The data shows not all, so I change the algorithm a bit...but still inconclusive. In the end, a surprise...but can it be repeated? Click the image to watch the video.
Arduino Yún: Testing shows some electronics is wrong and a fix is needed. Next: why does some of the written data not appear in the logfile? Finally: can I import the logfile into Octave? Click the image to watch the video.
Discovery: Testing sensors and no change in behaviour, it's time for a change: testing on the floor and of course with a larger distance. What can be concluded, if anything? Click the image to watch the video.
Arduino MegaADK: No Android anymore. But how can I differentiate from Mega2560 when the USB host is unusable? First: check the photo-transistor with the oscilloscope. Then: add a motor, electronics and some code? What goes wrong? Click the image to watch the video.
RaspberryPi2 & ROS: Focus is again on messaging. Why doesn't it work the way I want? Last series of attempts before (maybe) starting over. Click the image to watch the video.
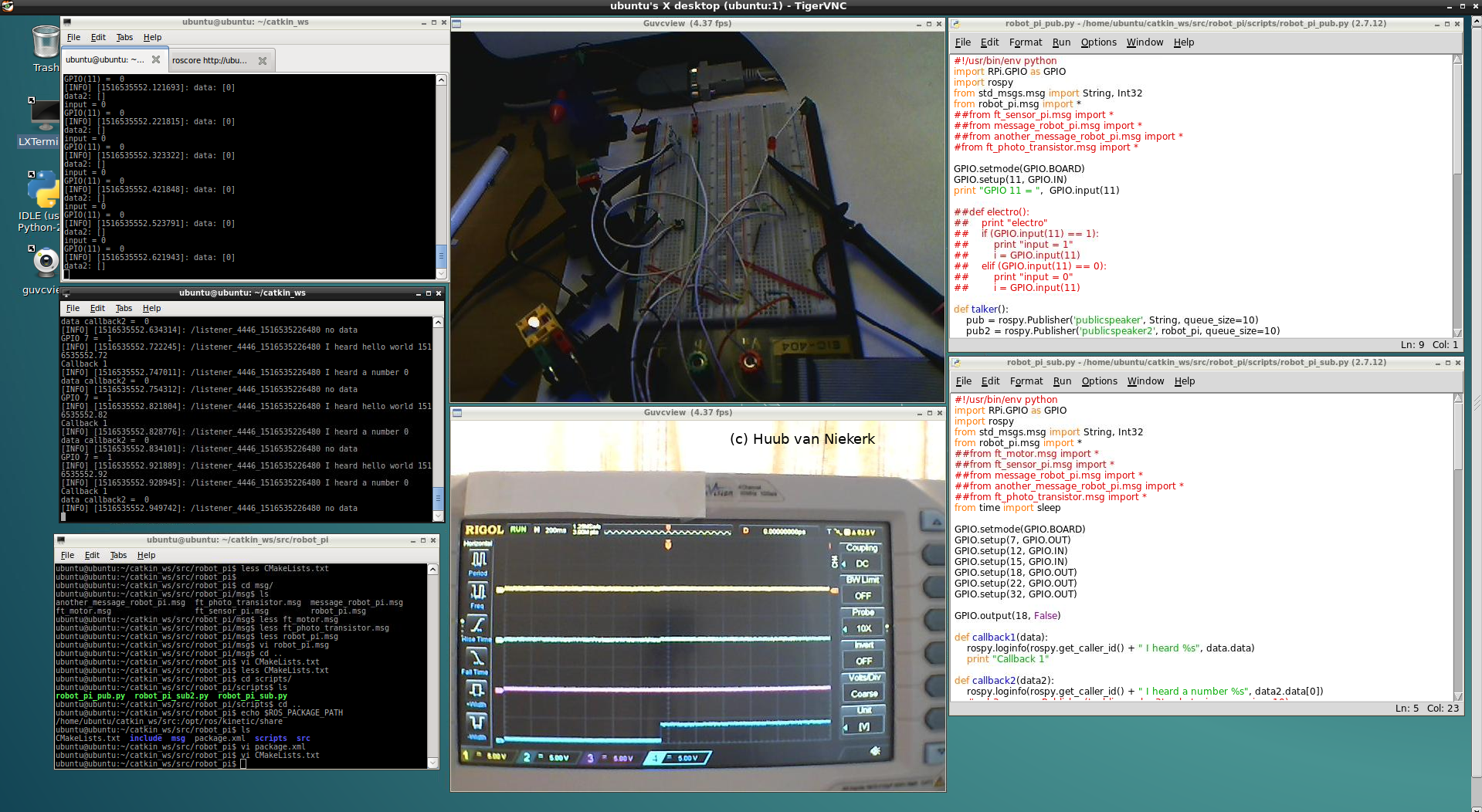
BeagleBoard & monorail: The long awaited reconstruction of the track is finally there. After it, some more tests..with which results? Click the image to watch the video.
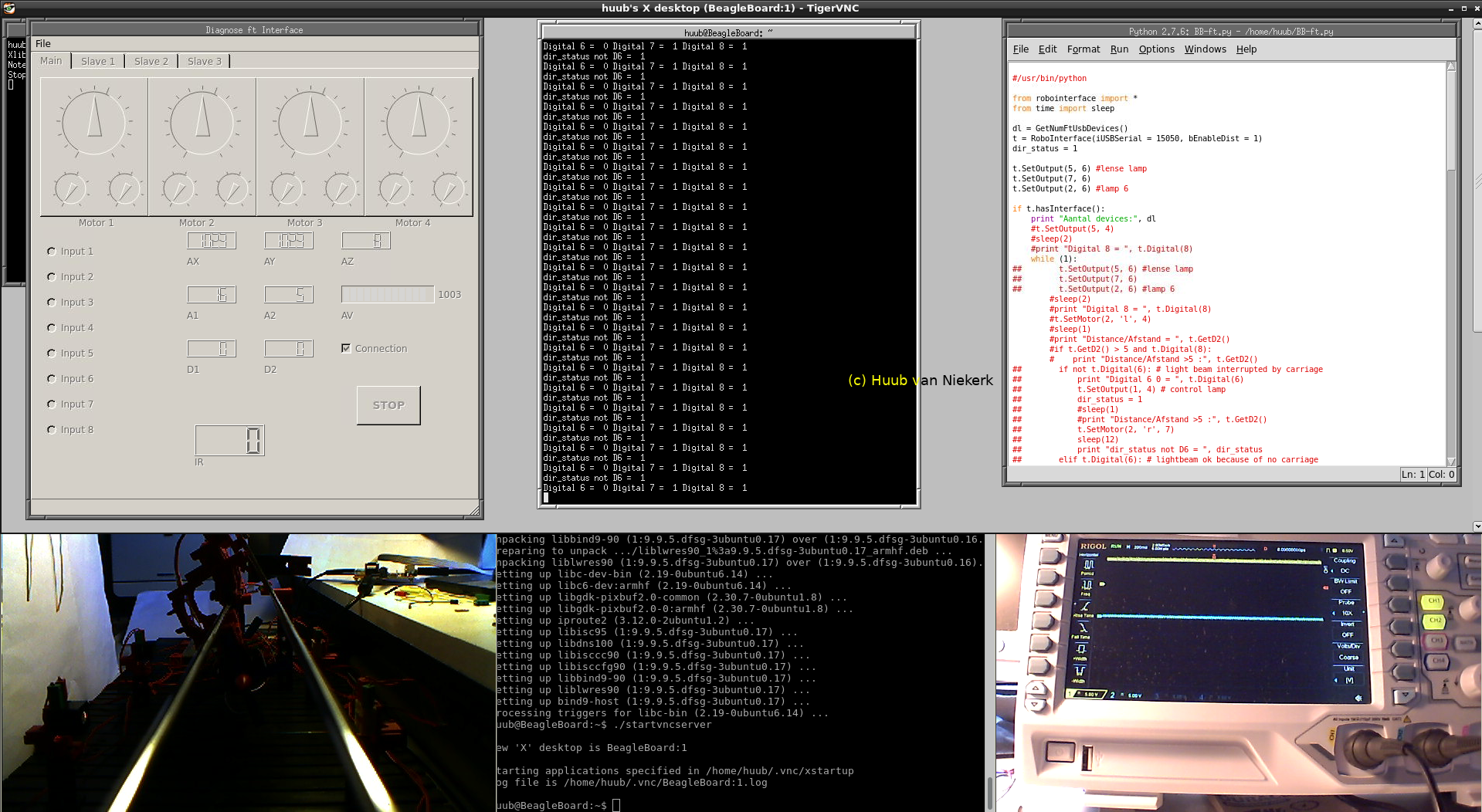
19 January
Arduino Mega2560: SPI again: I know where it goes wrong. But why? Testing a small algorithm change, I can confirm it works in another place. So what's up? Then: why does the Uno motor not work? Speed? Wiring? Click the image to watch the video.
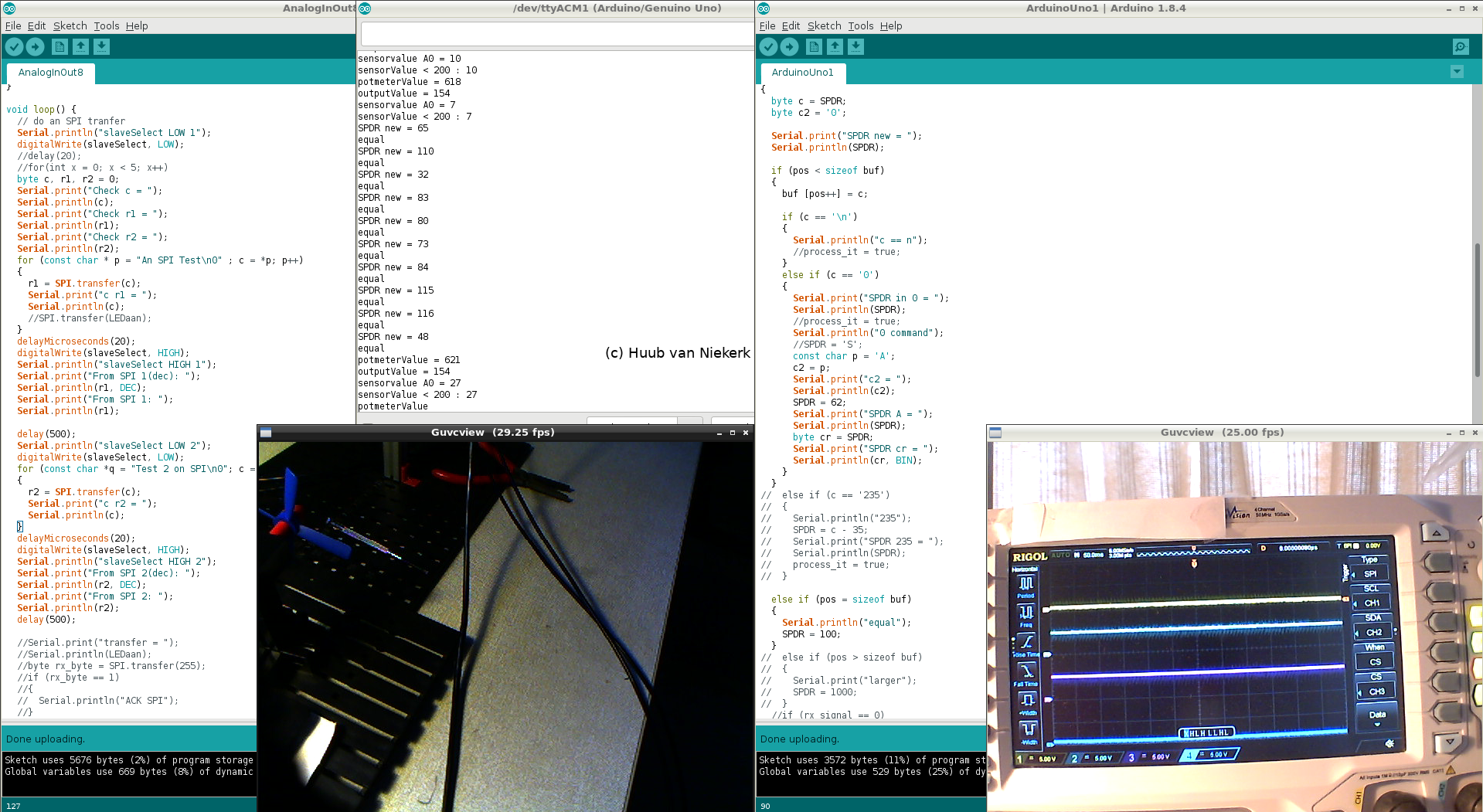
Hand: Again the yaw of the hand: after changes for the wiring, it shows that a reinforcement is needed..whcih needs a reconstruction. Does it work? Also: to make the lower-gear sensors work, a relocation of the counter-weight is a solution. How? And does it work? Click the image to watch the video.
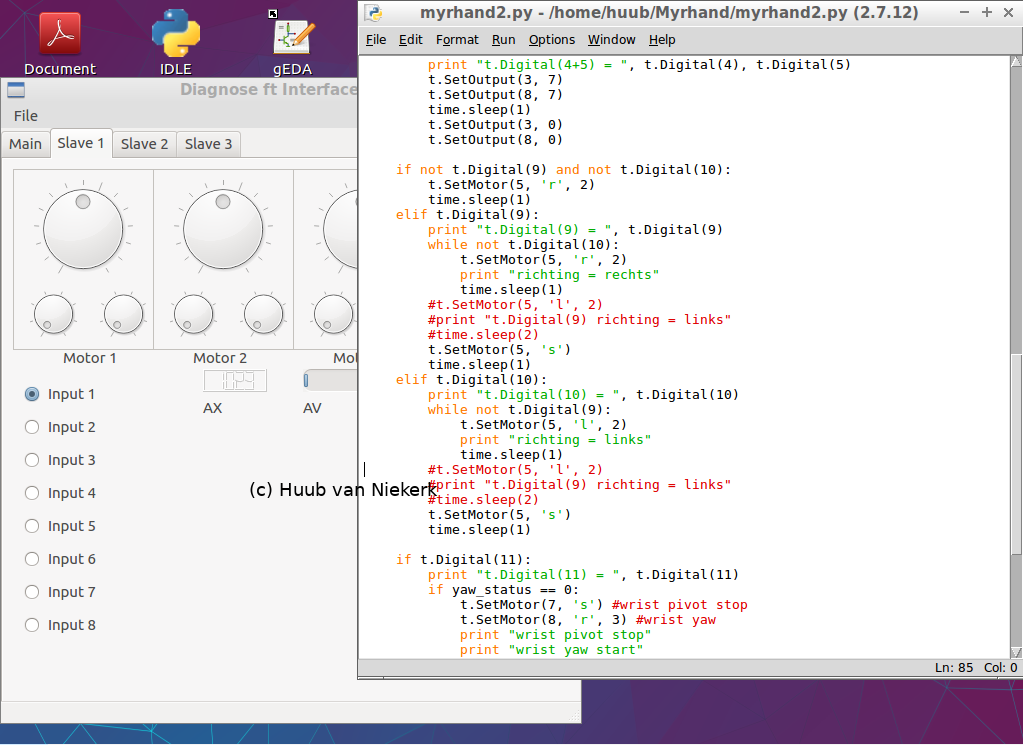
RaspberryPi: Using the ADC, testing 1 LDR and expanding with more components, among which fischertechnik. This gives a surprising result. Changing the code to work with more than 2, gives a problem first but when it's solved gives some more insight. The oscilloscope shows some signals, but how to differentiate? Click the image to watch the video.
Mirft2: Testing sensors again, but starting with an oops. After a check, further tests which leads to a change in counting. Which is which? Using ROBOPro is become clear that the algorithm has a flaw. And still sensor 2 is missing?! Click the image to watch the video.
Mydfir: The focus is this time on sonar, but something is not quite right. After a power-cycle, it works slightly better, but why? A little algorithm change, will that help? Several tests later and comparing data...what's the verdict? Click the image to watch the video.
Arduino Yún: With almost everything working, it's time for something new. Choice is a fischertechnik phototransistor, but how to connect it? There's an input available, but how about output? It also requires wiring and some code. Will everything work? Click the image to watch the video.
Discovery: Testing sensors because of confusion gives some unexpected results. ROBOPro points out that some wires are different than thought, so all good? Some screenoutput points to a replacement, but what's the result? Then a big oops, but how come? How is it solved? Click the image to watch the video.
Arduino MegaADK & Android: Testing the Arduino and Android, I check the last timing result with for-loops. What's the result? Then I check details on the connection and find an oops. On with the Arduino: I need some rewiring and I find an oops in the code for the lamp. Click the image to watch the video.
RaspberryPi2 & ROS: Into messages again: will throwing away help? Will replacing help? Will adding help? Will "catkin_make install" help? What does the tutorial say again? Click the image to watch the video.
BeagleBoard & monorail: Testing the speed with the modified carriage brings new questions. Is more modification needed? How? What's the height of the track? What's stopping it? What makes it run? Connection issues...and how to solve them. Click the image to watch the video.
12 January
Arduino Mega2560: Testing SPI again: where does it go wrong at the Uno-side? Slowly a mystery comes to surface, but why does it happen at all? Also, at some other point it does go well..but how come? Click the image to watch the video.
Hand: While trying to improve the yaw cord, I realize that a major reconstruction is needed. But how will this end up? Does the software need change? Click the image to watch the video.
RaspberryPi: Trying the ADC again by rewiring to the original schema and code with a surprising result. Which becomes visible on the oscilloscope after a change of the timebase. Then: how does everything else work? Searching the net gives a clue, but will it work here as well? Click the image to watch the video.
Mirft2: After the new authorization, what happens? Testing with the images gives an unpleasant surprise with the date. What's with the battery? Then with the oscilloscope shows some weirdness on the pwm. What's up? Sensor testing brings confusion. Click the image to watch the video.
Mydfir: Line following again: why is the righthand side not ok? Why is sonar acting strange? Searching for clues in data shows oddities. Is the code ok? Click the image to watch the video.
Arduino Yún: Testing the circuit, then code: why is only 1 value recorded? Some testing reveals 2 problems and a quick solution. Then it's time to replace a potmeter without the need to rewire, but it takes some soldering. Will everything work? Click the image to watch the video.
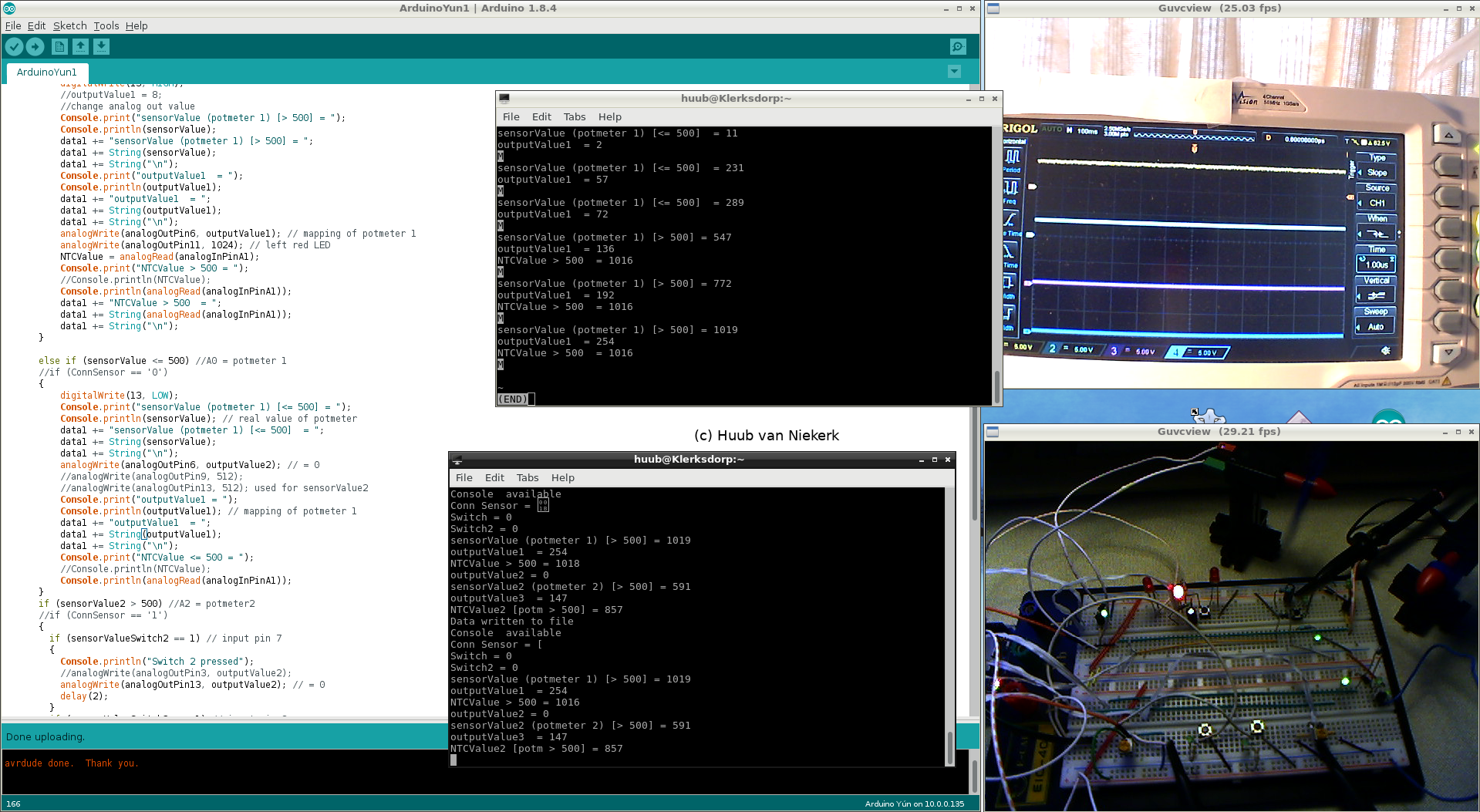
Discovery: Checking the motors with the oscilloscope reveals that 1 motor has no signal: a problem which is quickly solved. Next: authorization, then: how do the sensors behave? ROBOPro shows all work, so with 1 sensor reporting, what's up? Click the image to watch the video.
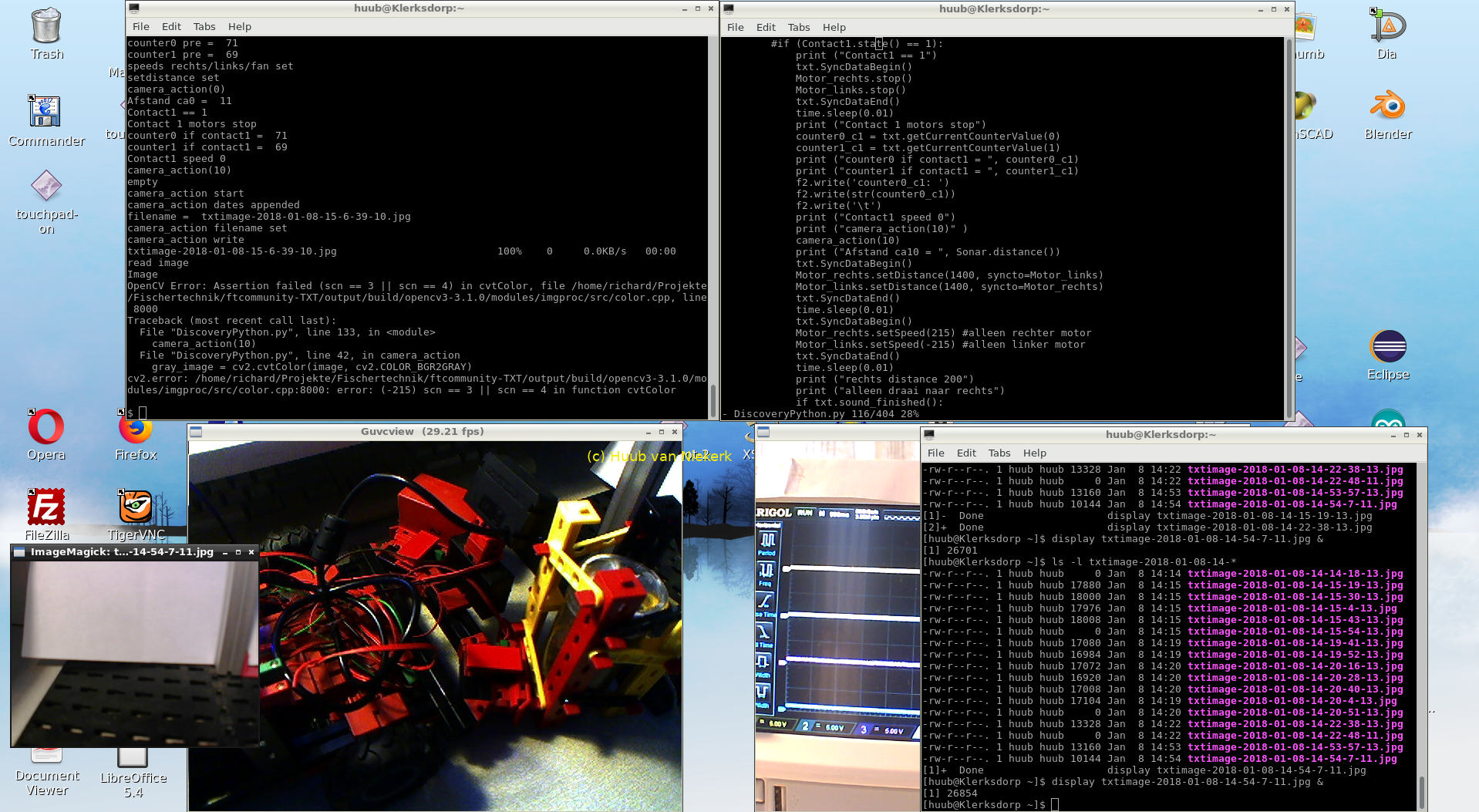
Arduino MegaADK & Android: First, testing everything and thinking of improvements. Then: how to increase the delay on the Android? Which value to exceed 1 second? Next: the Arduino... constructing a lamp, rewiring and recoding. Does it work? Click the image to watch the video.
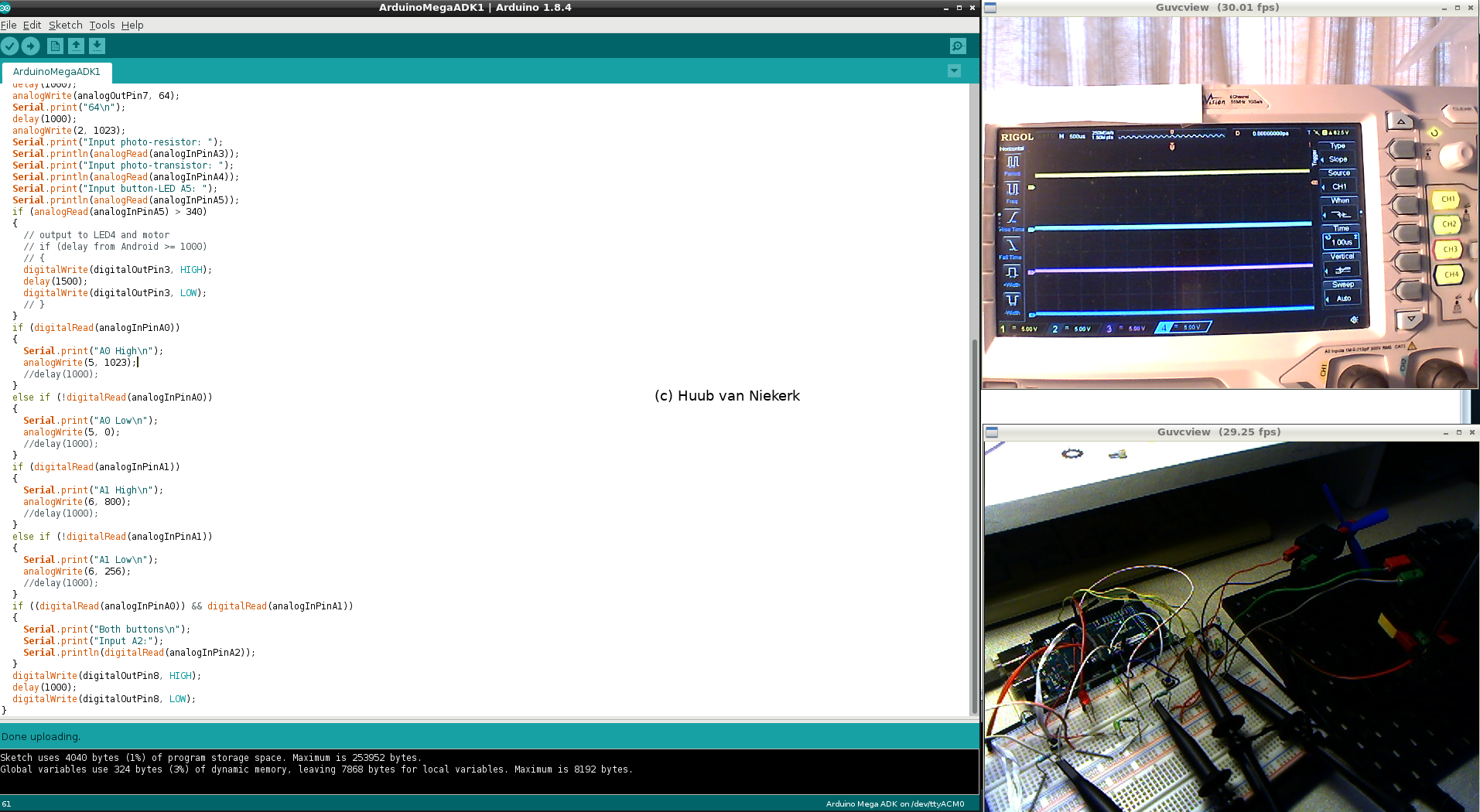
RaspberryPi2 & ROS: Testing shows the current situation works, kind of. Trying several ideas on the messages, what will work? Then some electronics oops. In the end, an idea for next time. Click the image to watch the video.
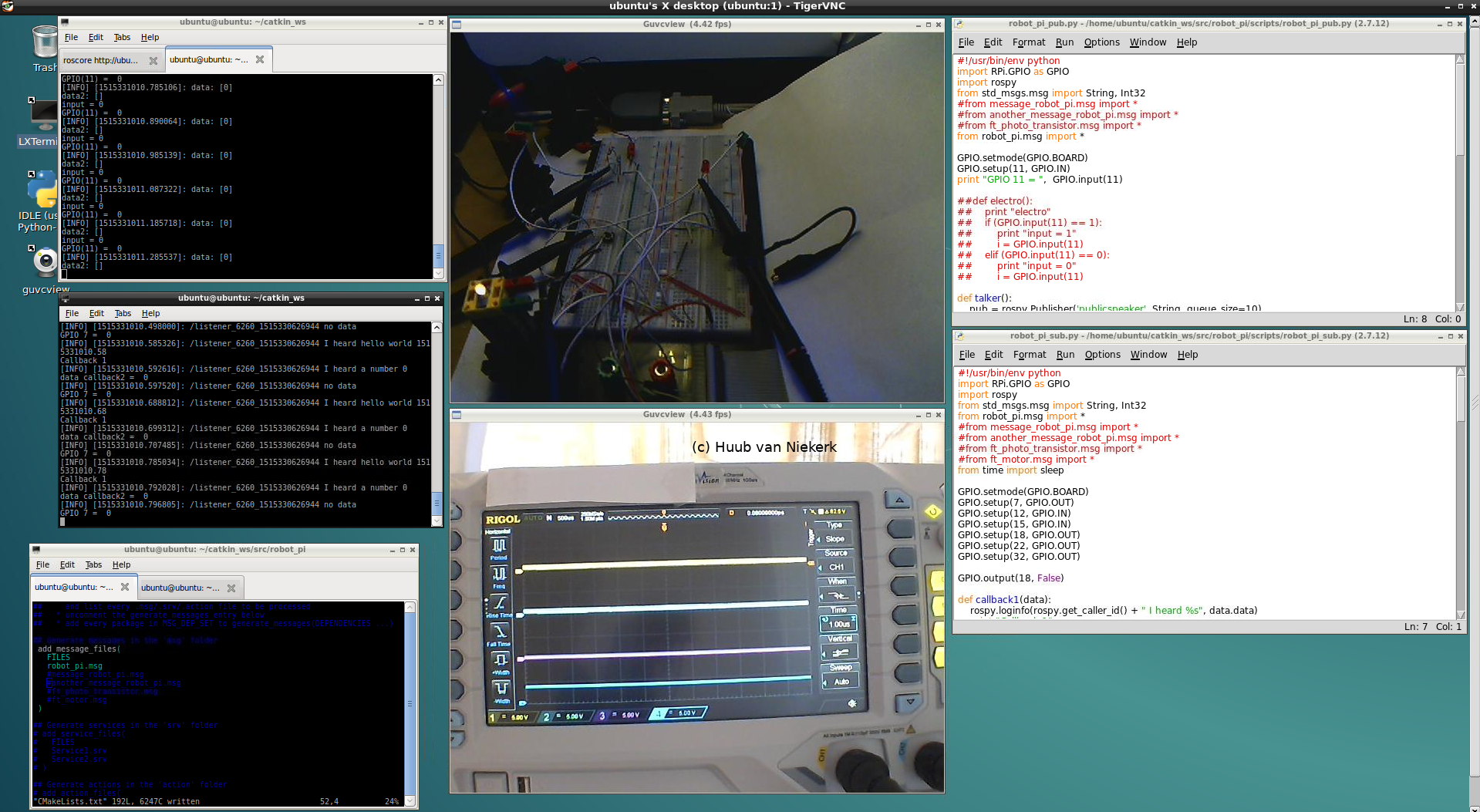
BeagleBoard & monorail: New rails haven't arrived yet. Testing reveals the balance is off. So first task is to solve this. Then: again some wiring. Time to really solve it. Also: if pressure solves the speed, then adding some weight may help. But how? Click the image to watch the video.
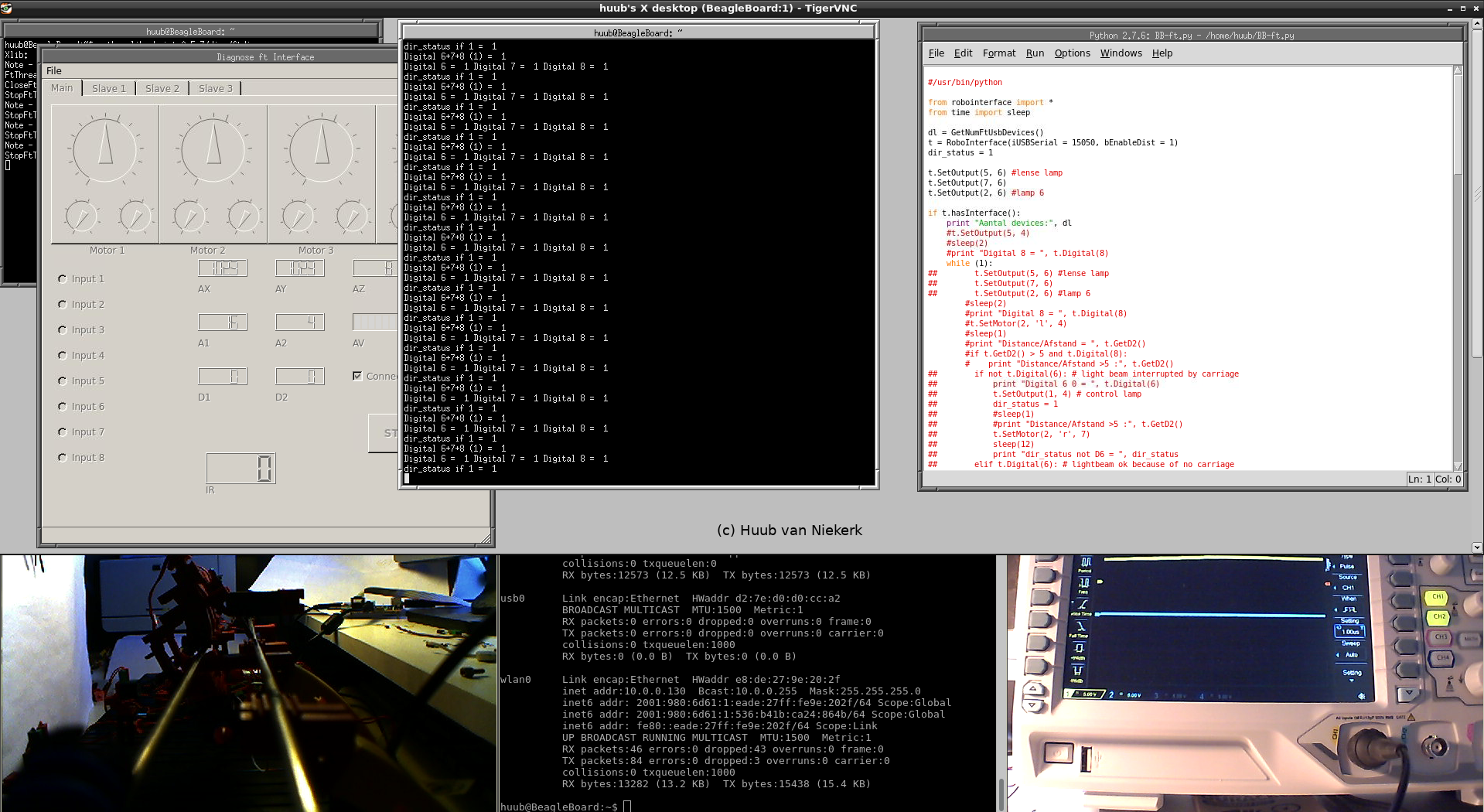
5 January 2018 (Playlist)
Arduino Mega2560: Testing the motor at the Uno side: does it still work? SPI signal on the oscilloscope: what's up? Testing the switch for SPI: what should the result be? Some algorithm change needed. Click the image to watch the video.
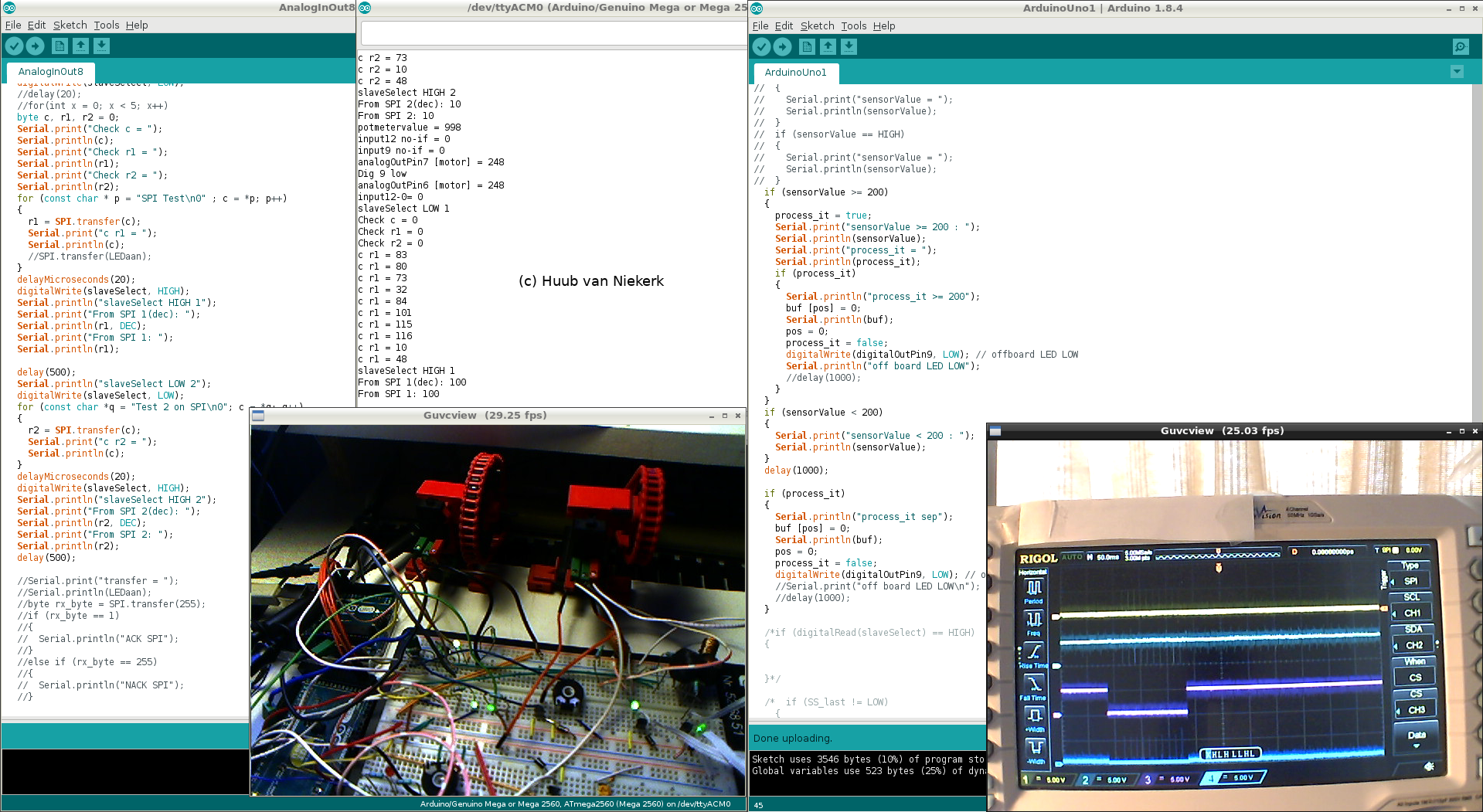
Hand: With the new winch, a wire needs to be put in place. Then some testing on the gears, the wrist, the algorithm. What about tension? Direction? Switches? Click the image to watch the video.
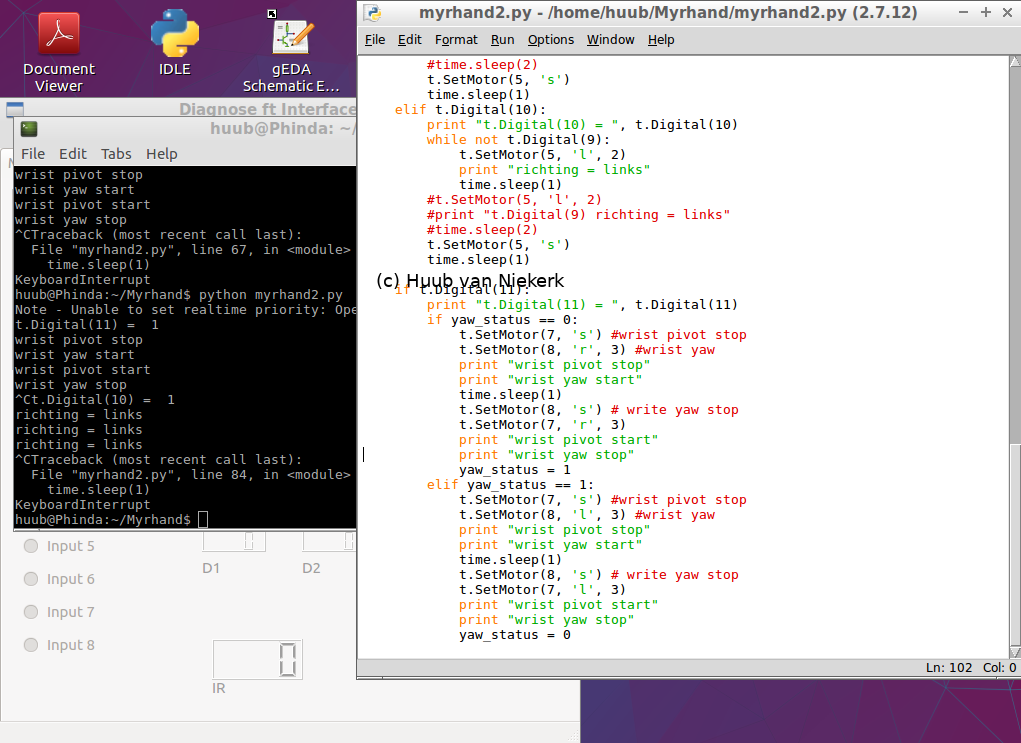
RaspberryPi: Testing with a new ADC using ESD, (re)wiring, LDRs, recoding Python. How will it work? Click the image to watch the video.
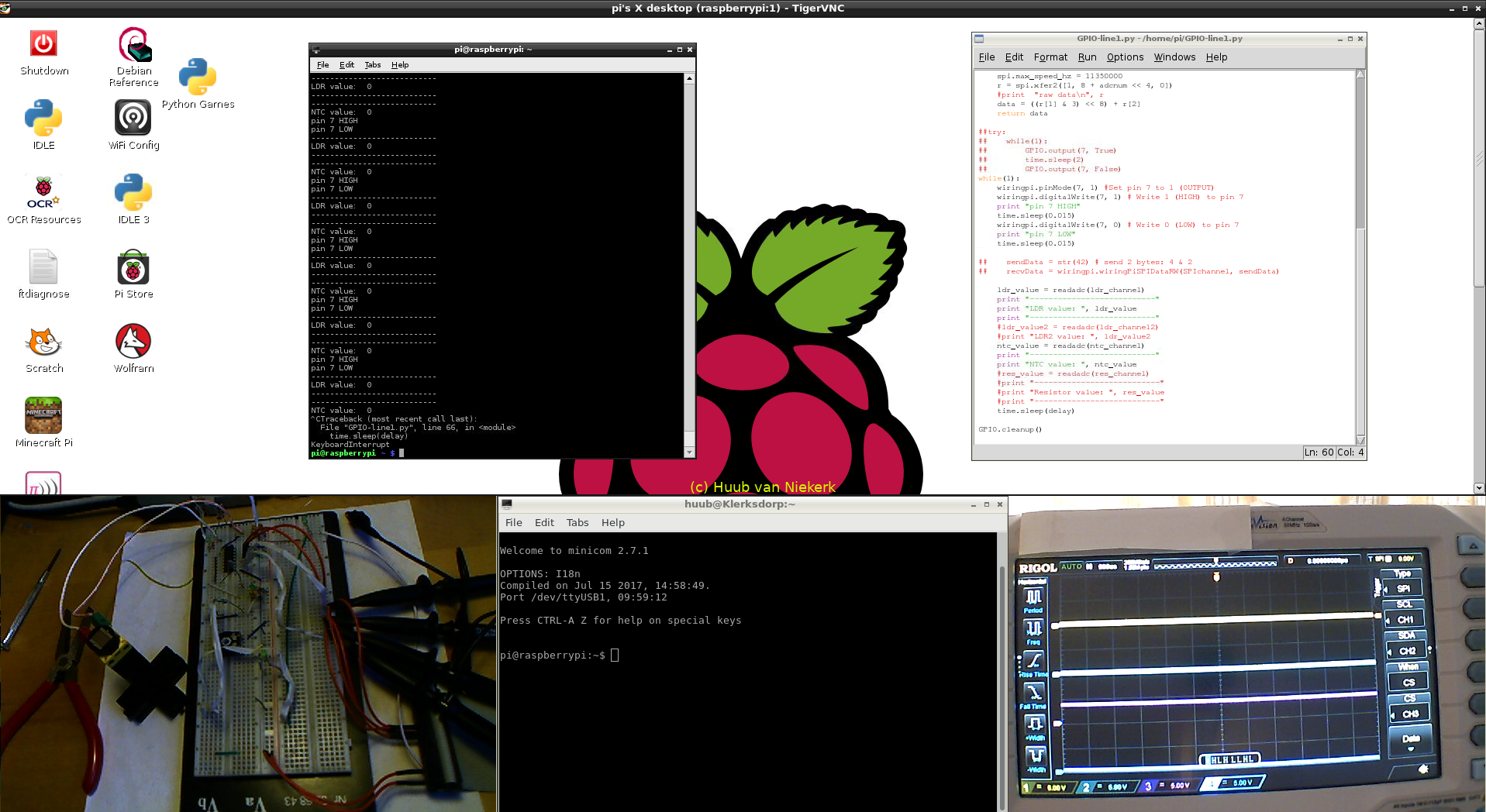
Mirft2: Continuing with trajectory and sensors: why seems only sensor 2 ok? What does ROBOPro tell ? What does the algorithm look like? Also, the scp command should be automated. Click the image to watch the video.
Mydfir: Testing and reasoning about the sensors leads to some code adjusments with regards to values. Some testing shows this finally maye work, but give straight lines and curves the same result? How about the sonar? Click the image to watch the video.
Arduino Yún: After testing, it's time to use all of the Yún: there's Linux too. As well as a USB memory stick. And some code to change. And an extra ssh terminal. Will it work? Click the image to watch the video.
Discovery: To solve an authentication problem, I need to test. But how is the trajectory? And why? And what's with the batteries? Will change of firmware bring clarity? Click the image to watch the video.
RaspberryPi2 & ROS: Testing shows some rewiring is needed and messaging seems a mess again. But how to solve it? Some replacement is needed too. Will it work? Click the image to watch the video.
BeagleBoard & monorail: Reconstructing the carriage is badly needed, but how will it end up? Some wiring is messed up again, but how to fix it? Again testing using Python and diagnose. Click the image to watch the video.