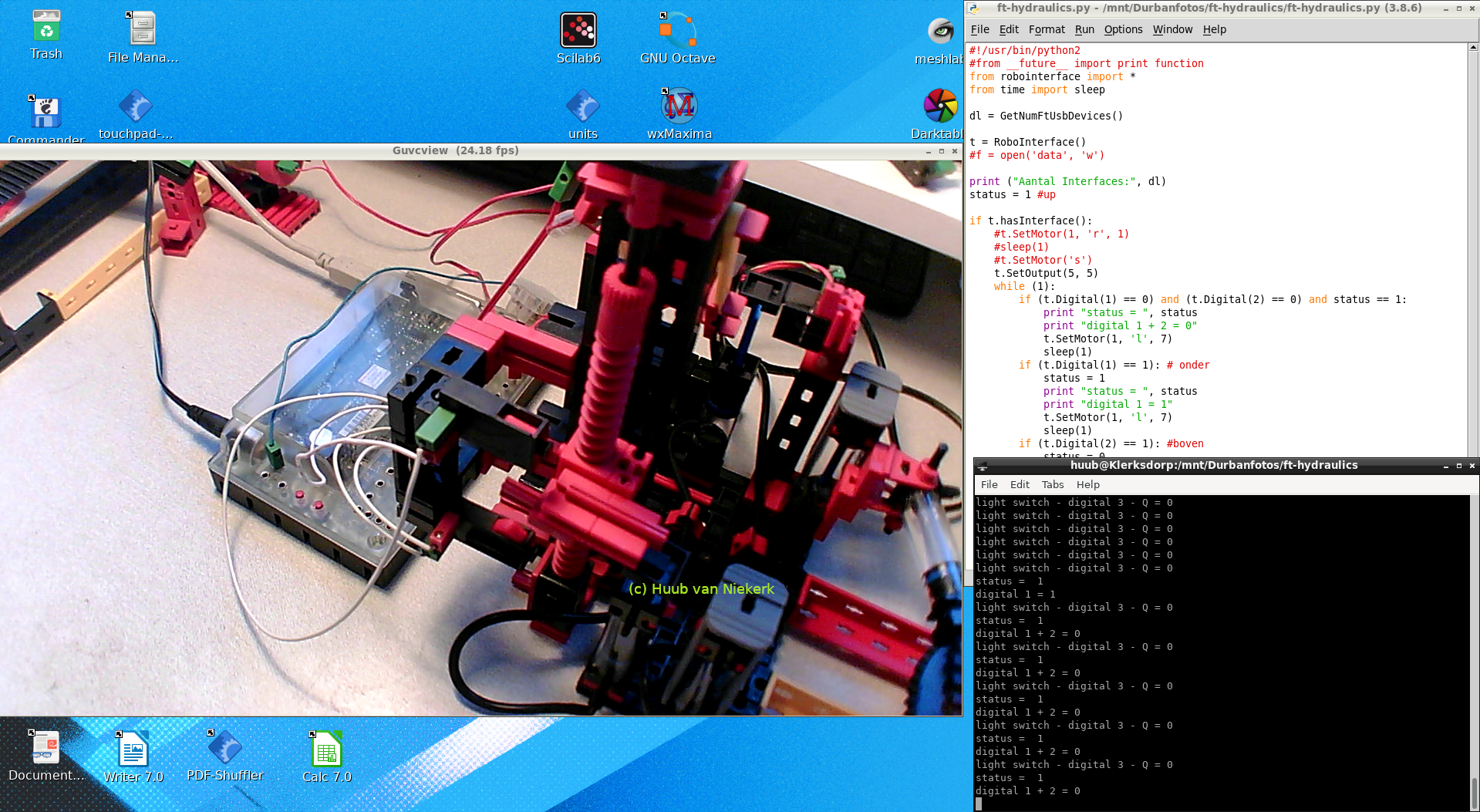
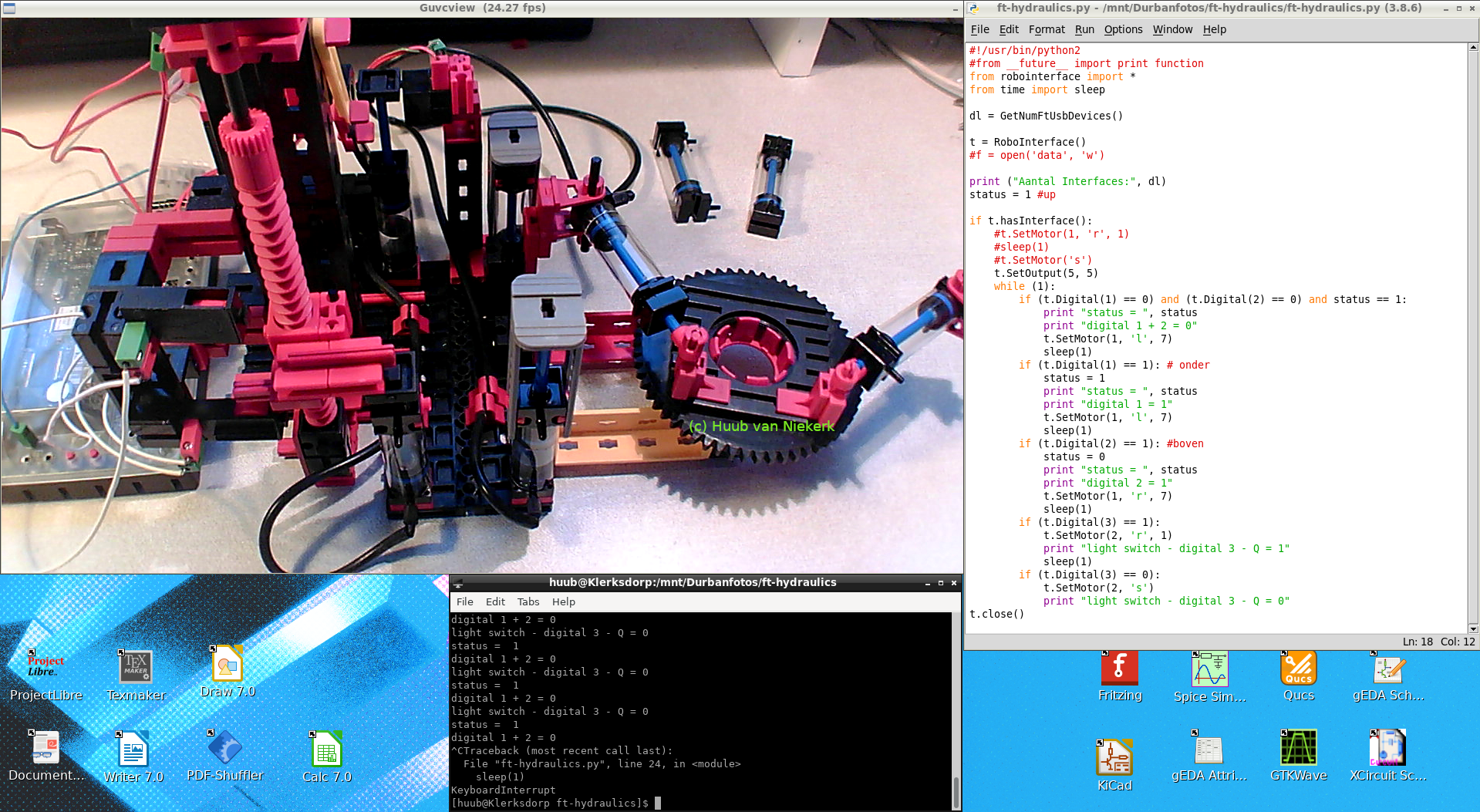
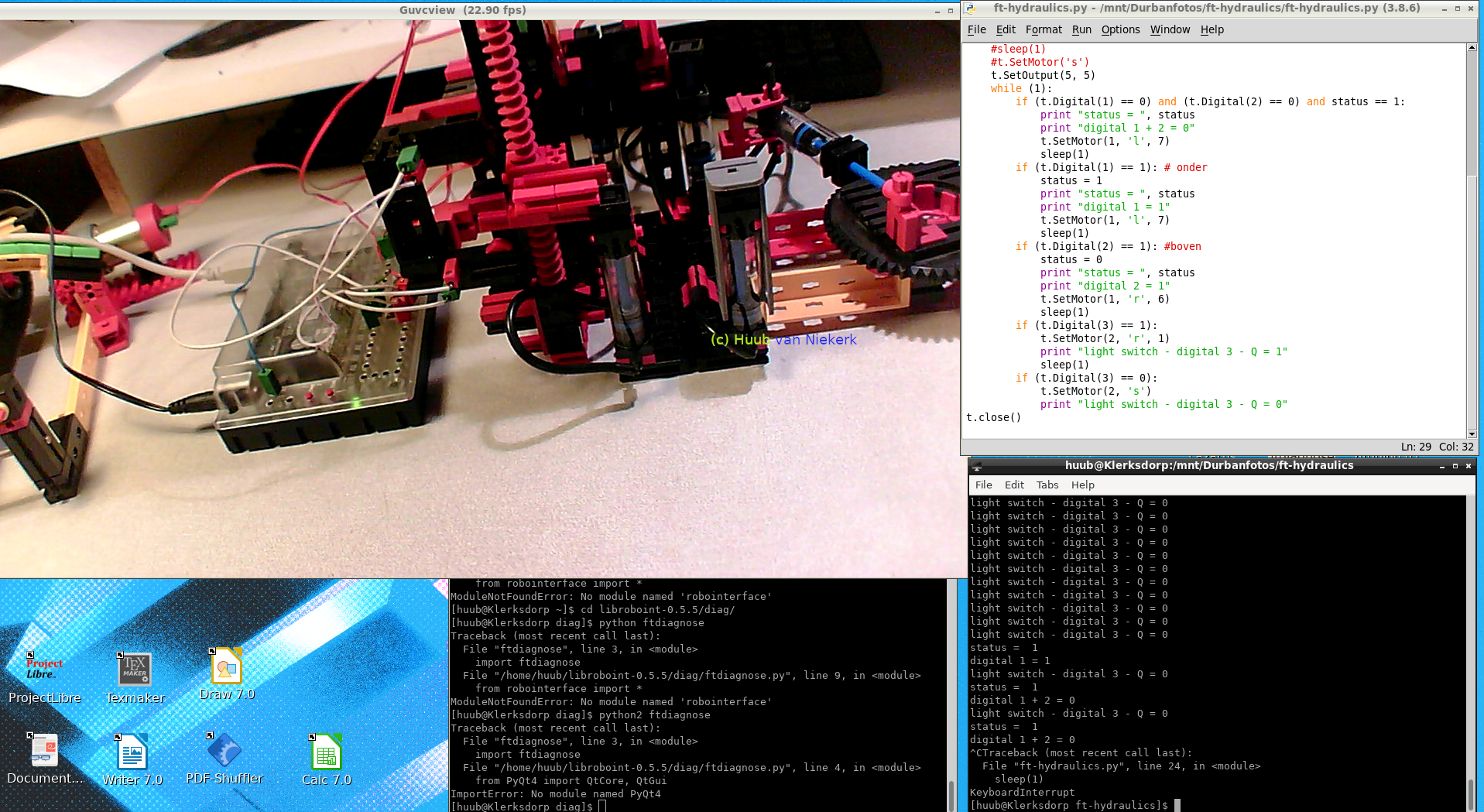
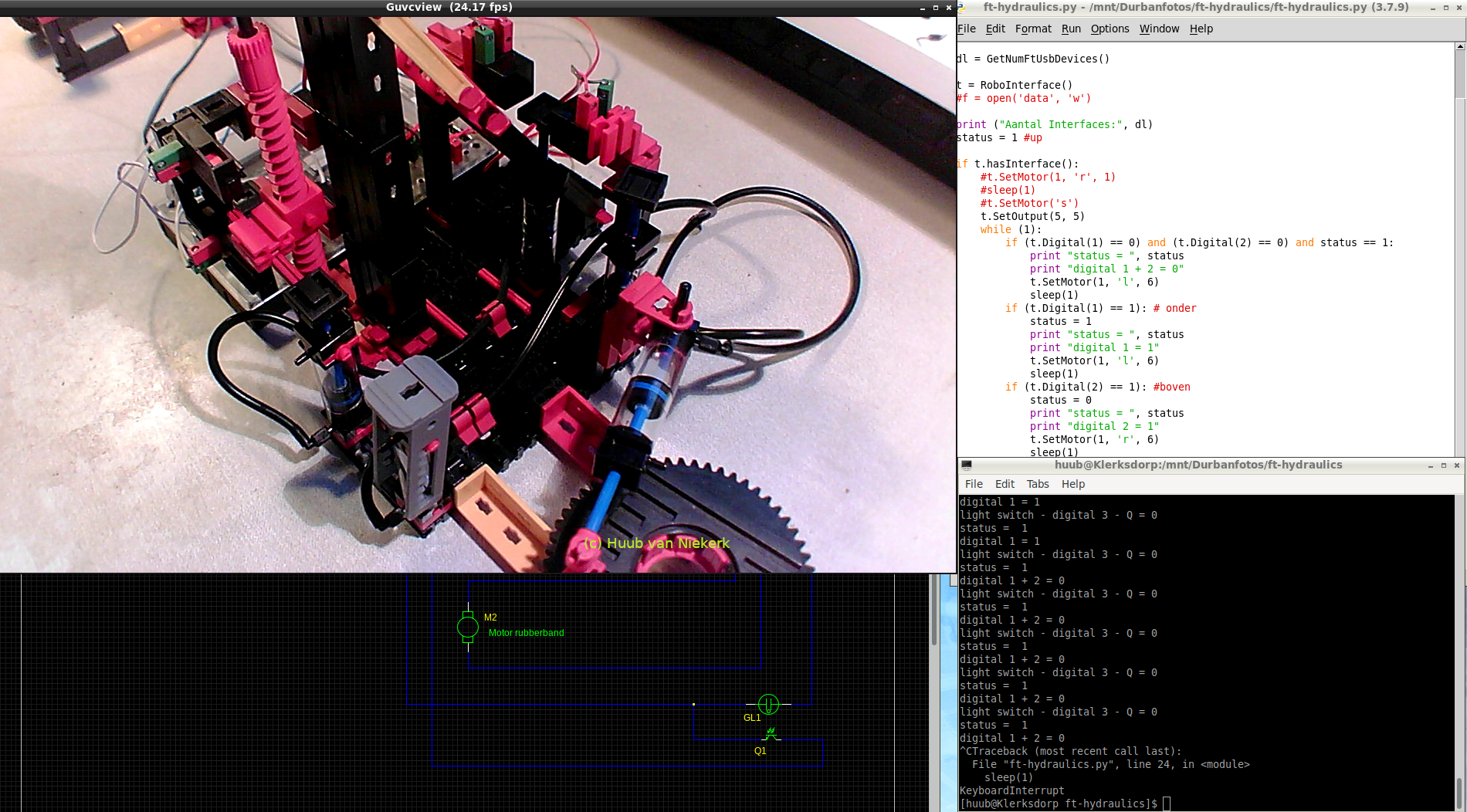
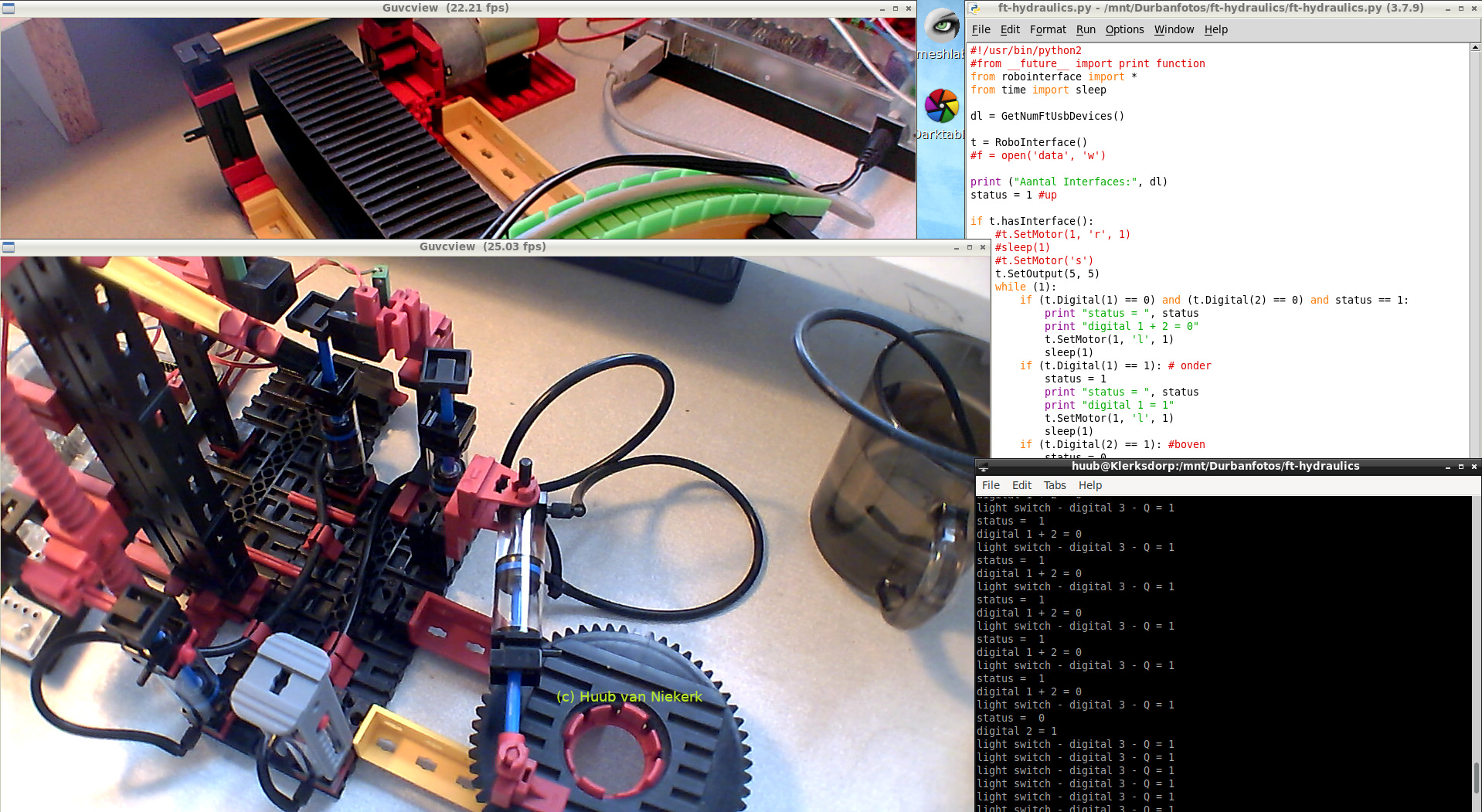
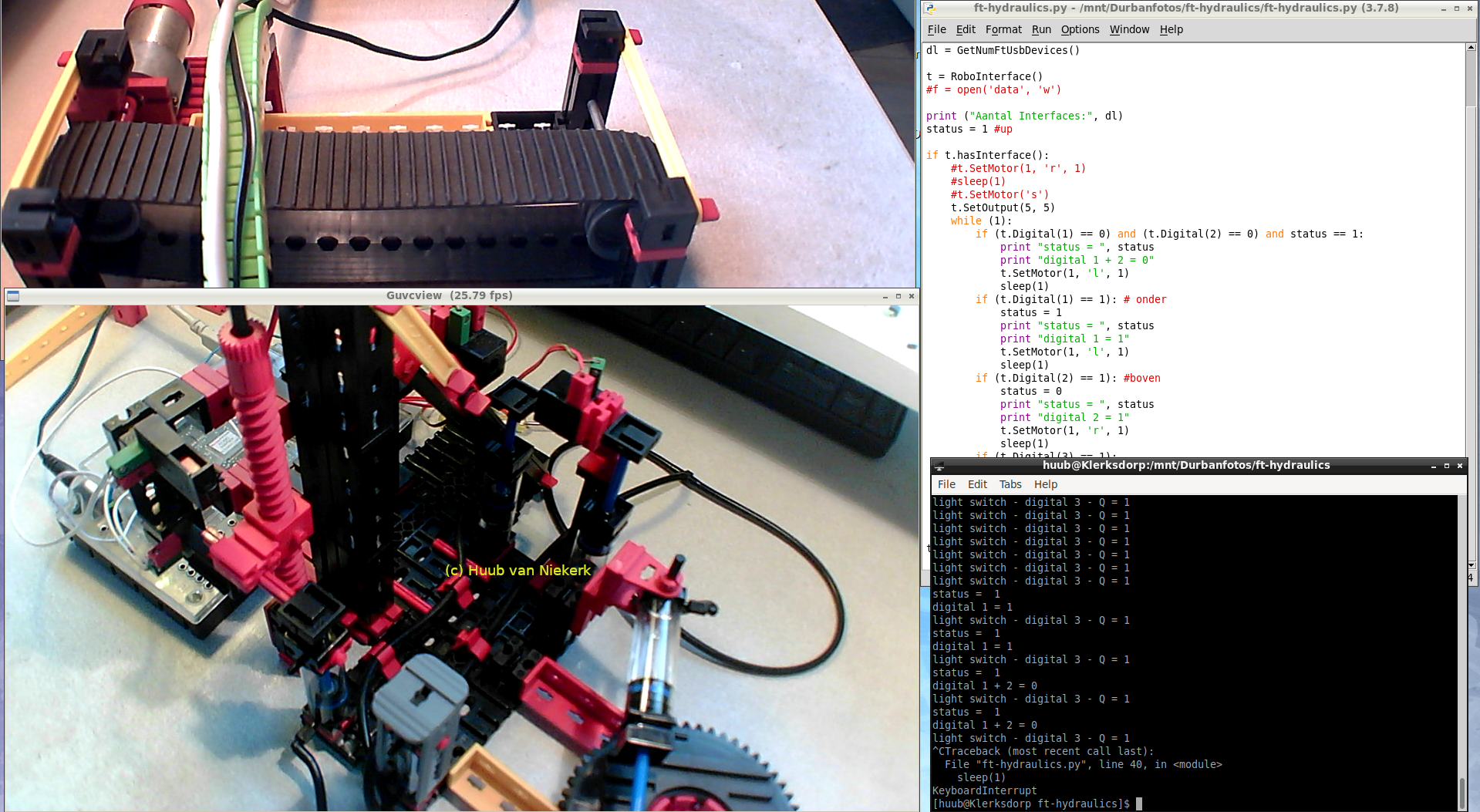
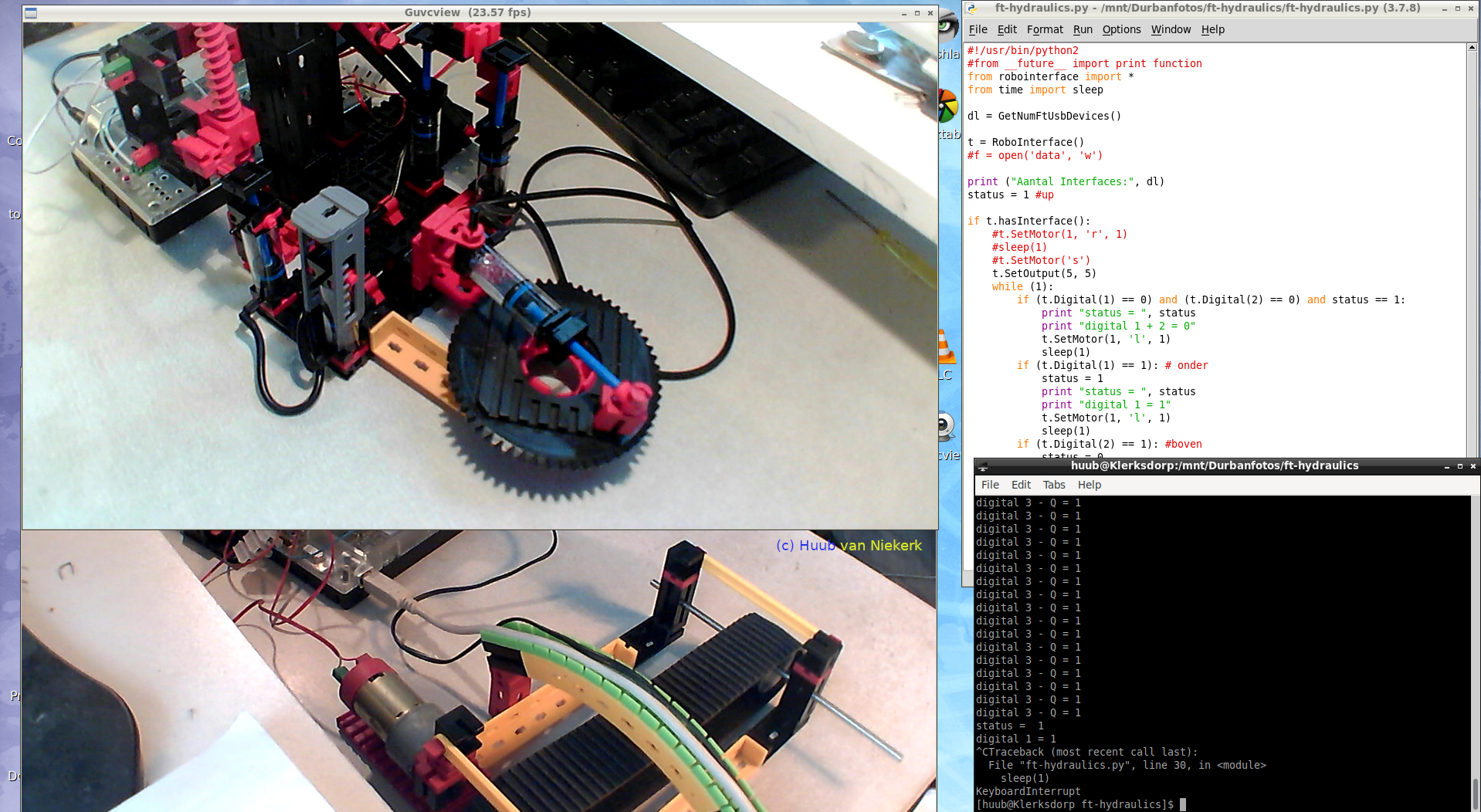
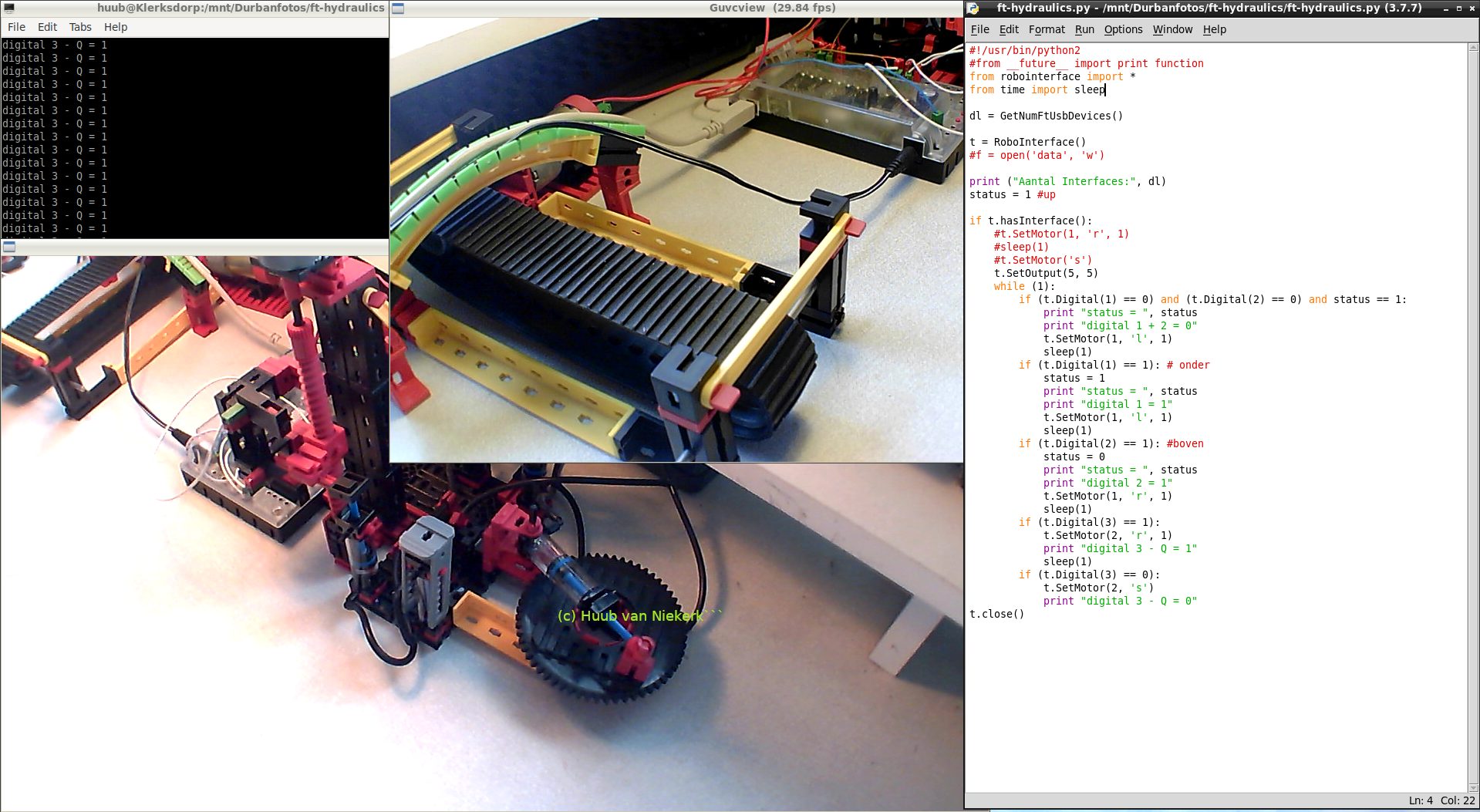
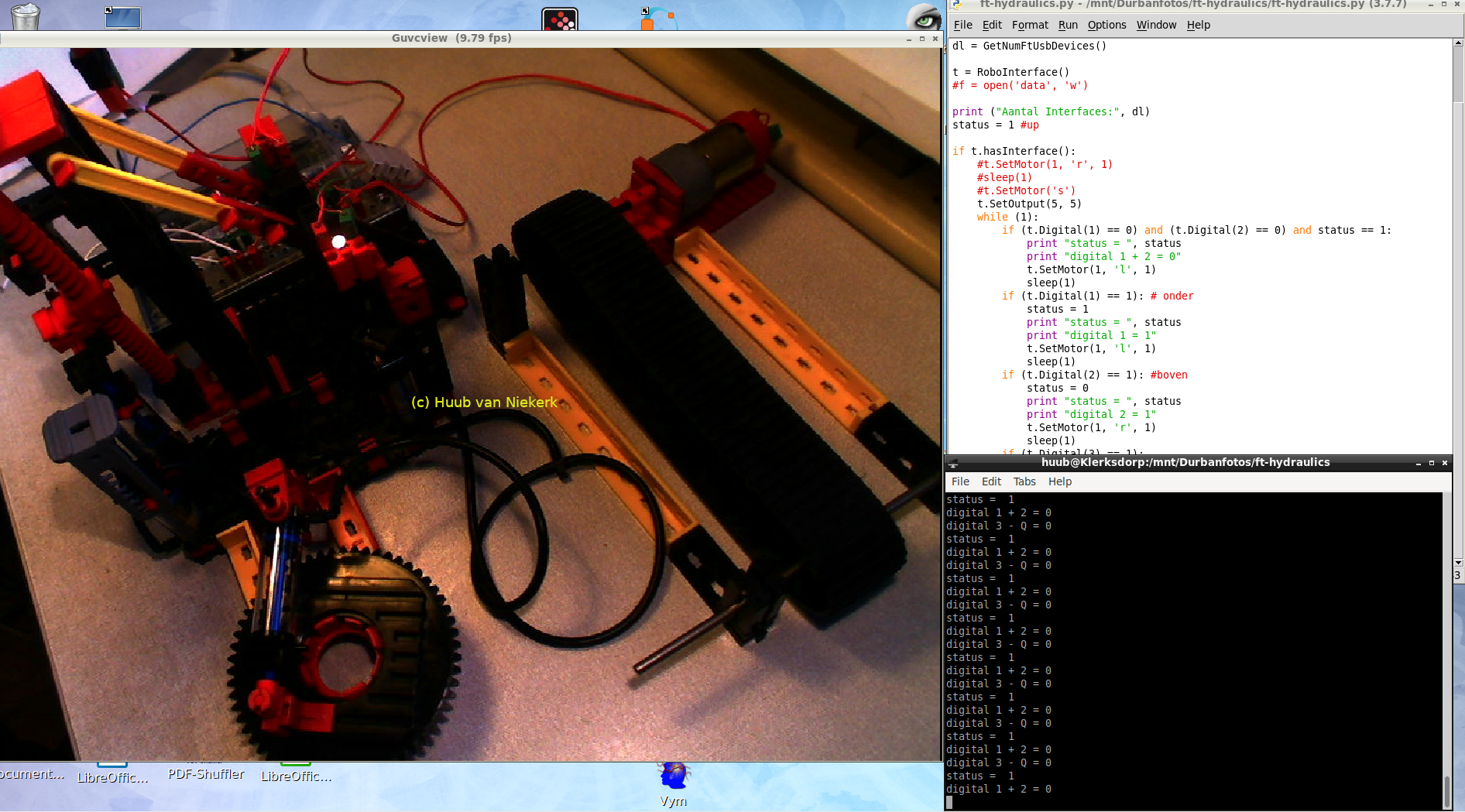
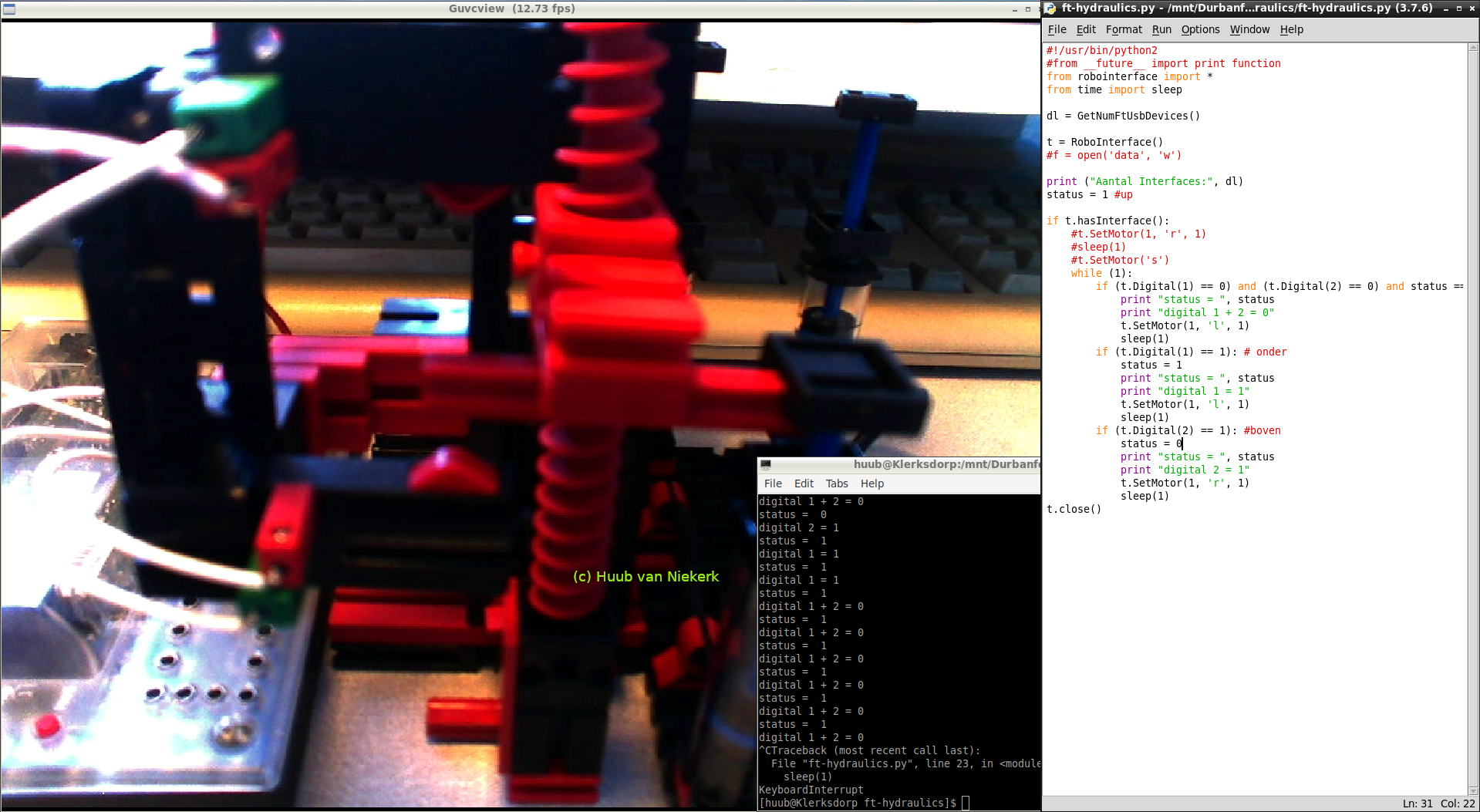
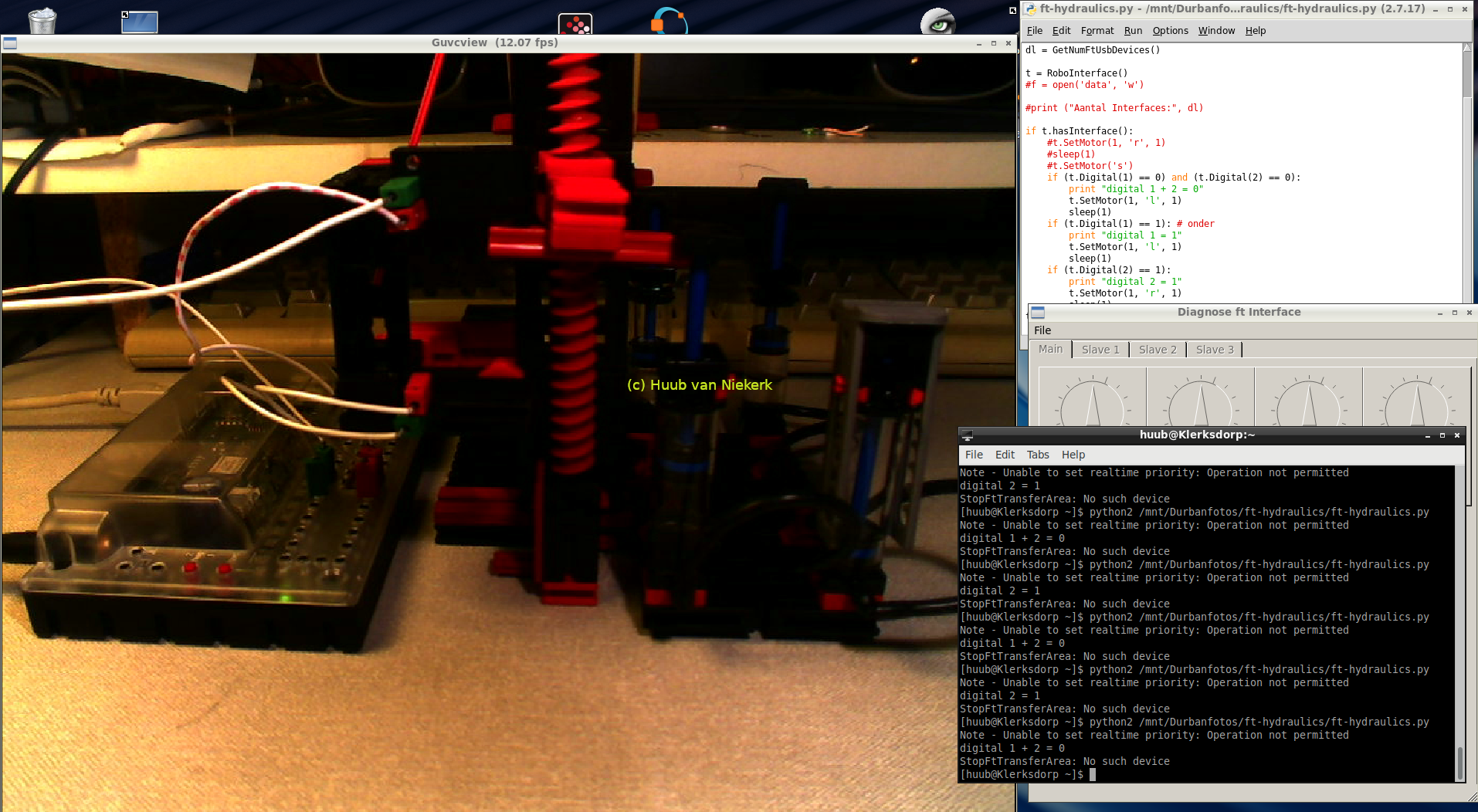
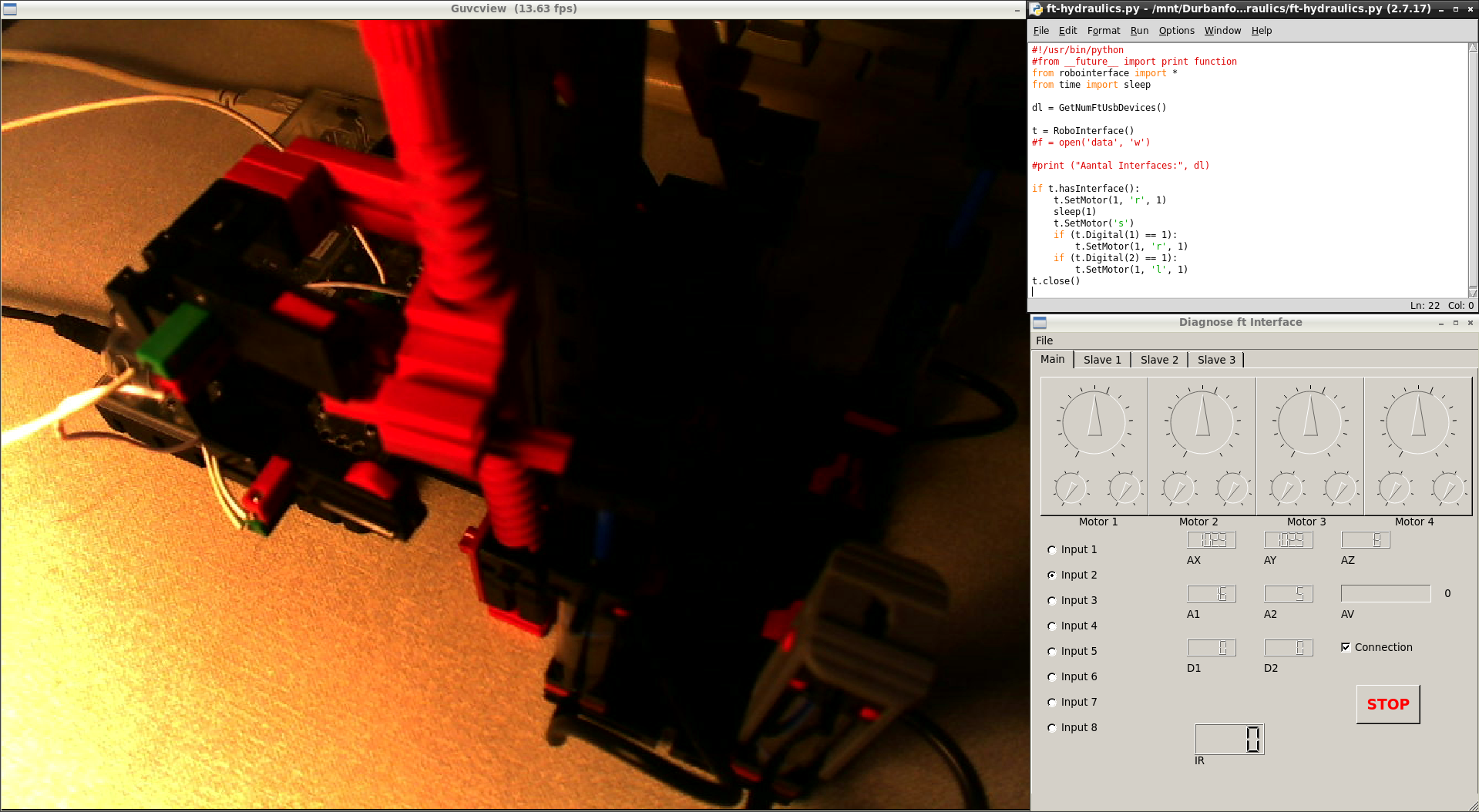
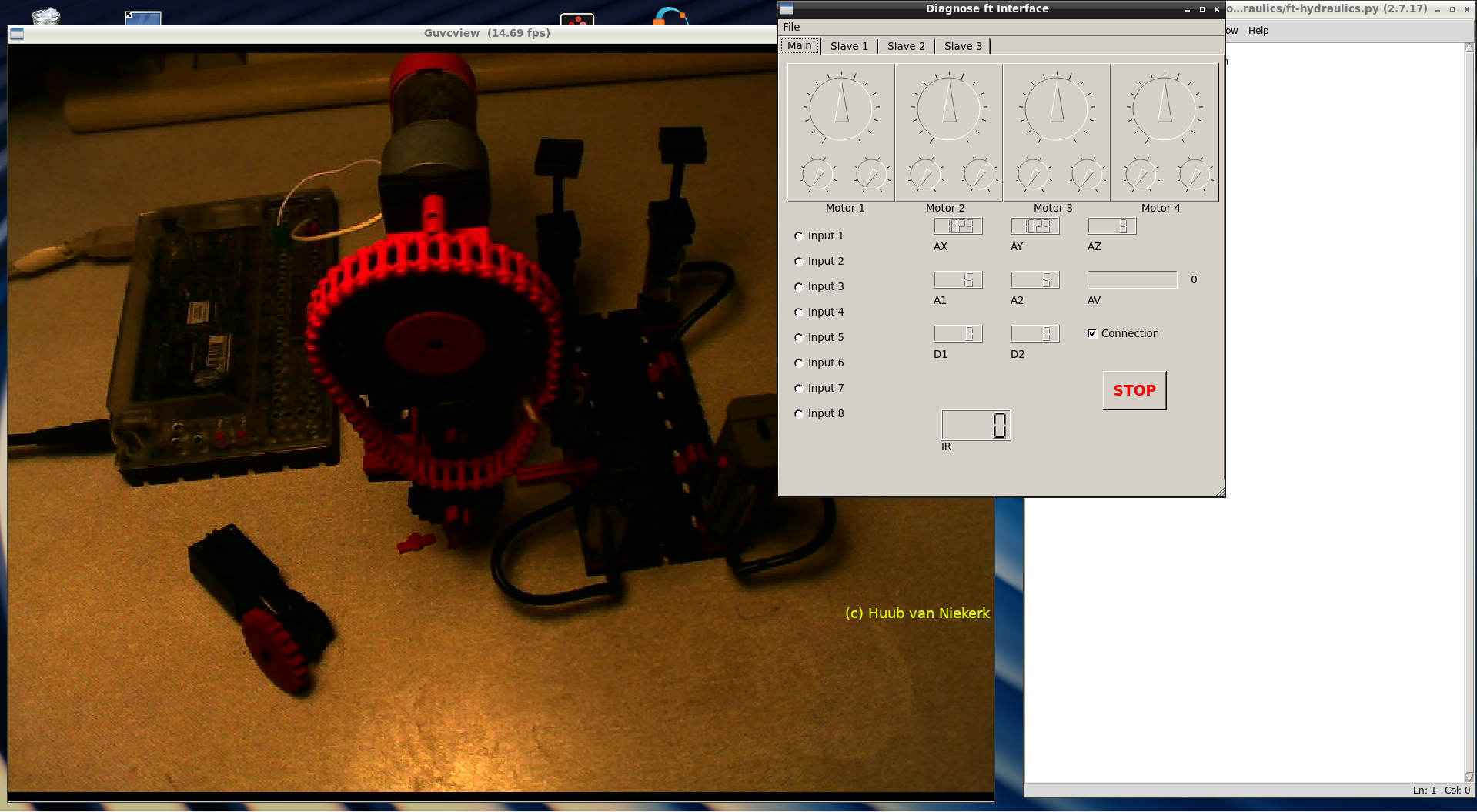
Hydraulics: Another reconstruction is needed to get the pivot with pistons rigid. But how? Afterwards, I find I'm not done yet. In the end, another test. Click the image to watch the video.
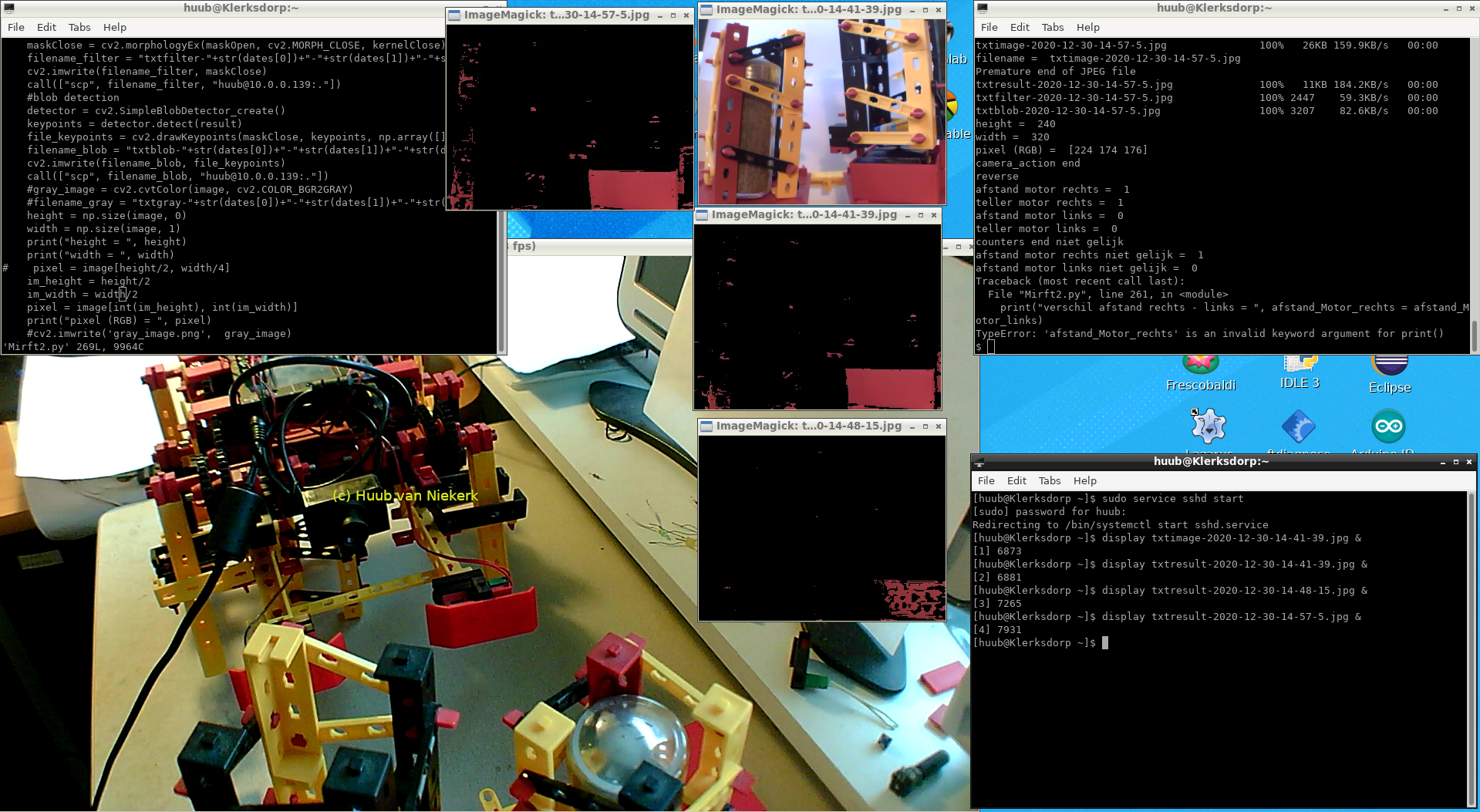
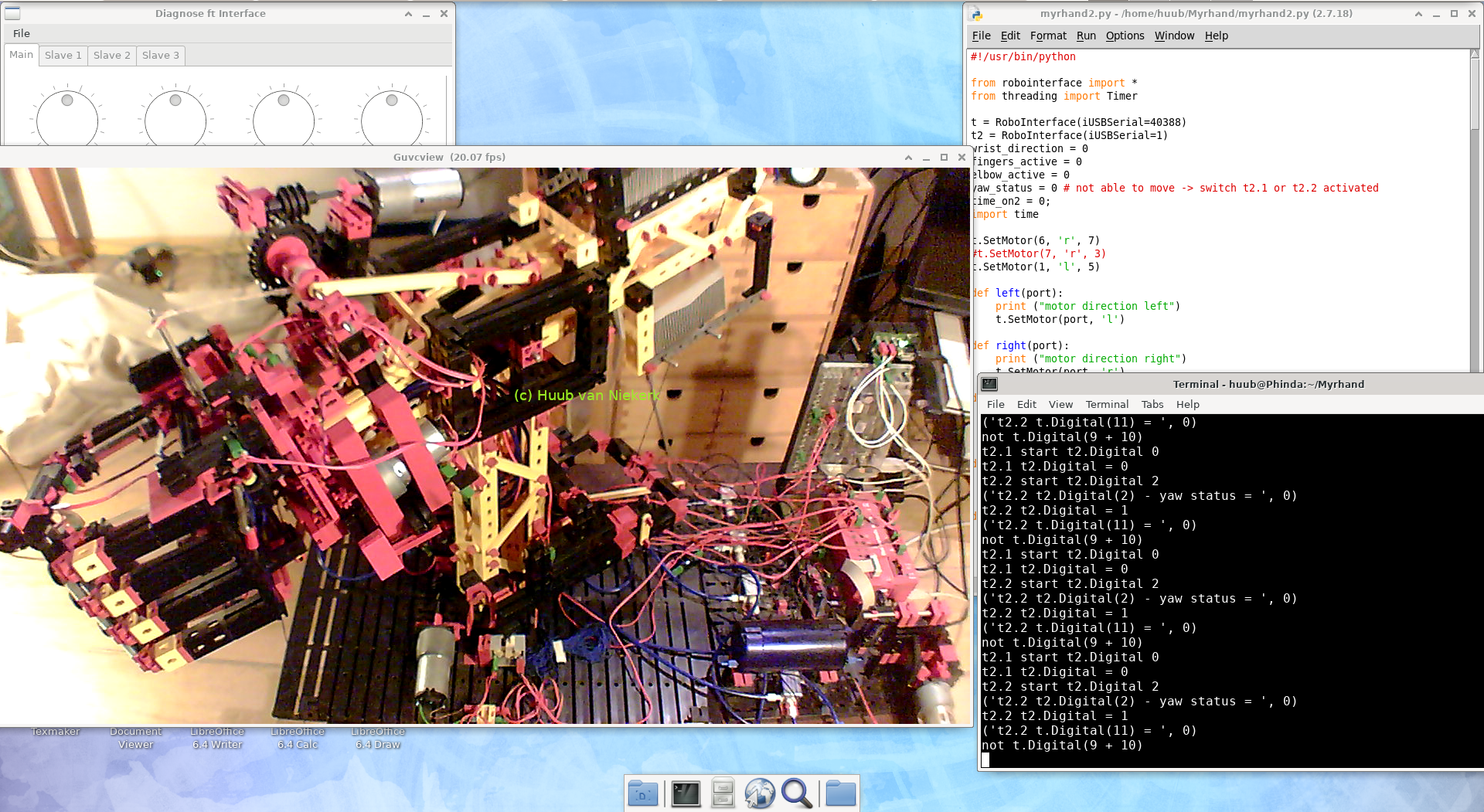
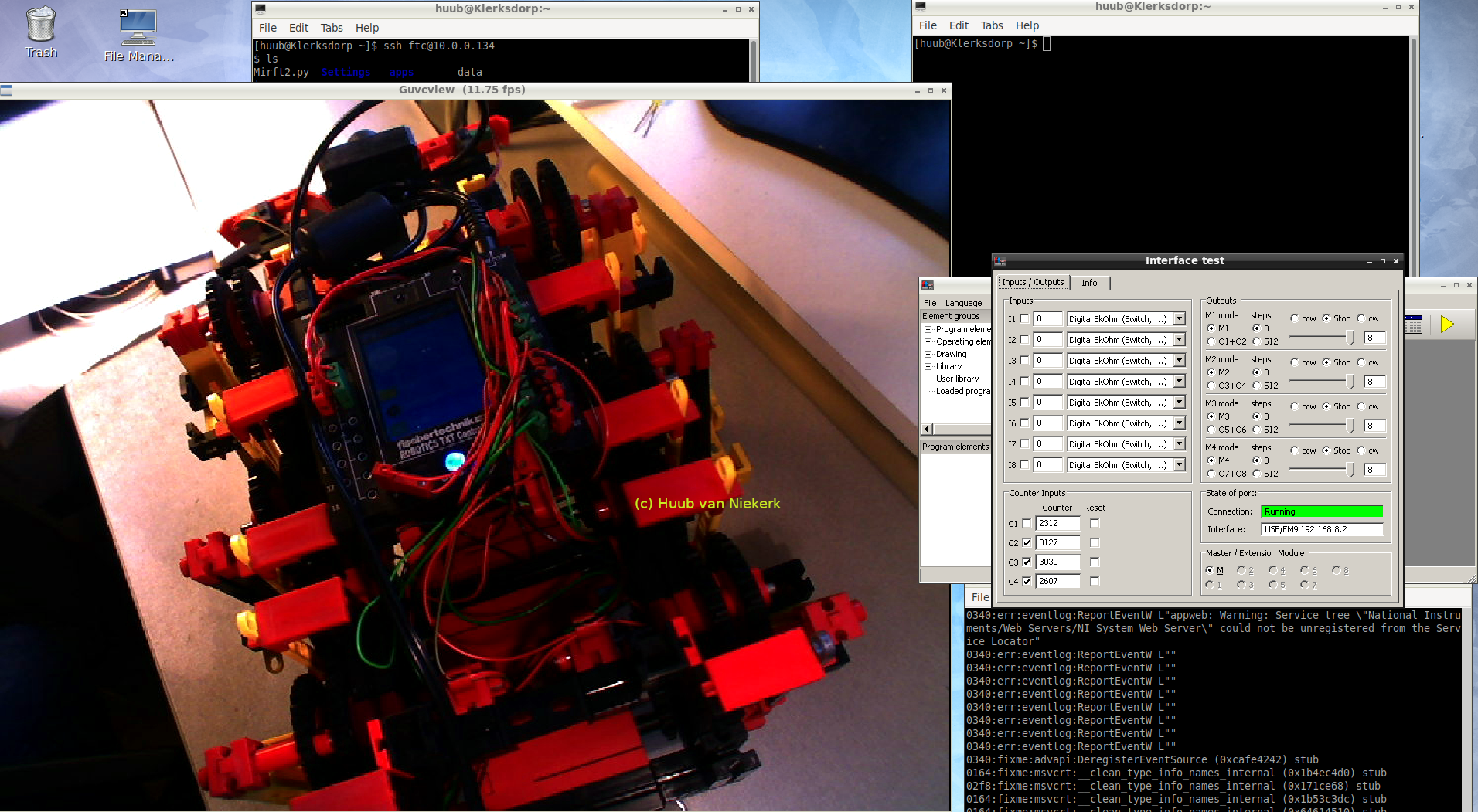
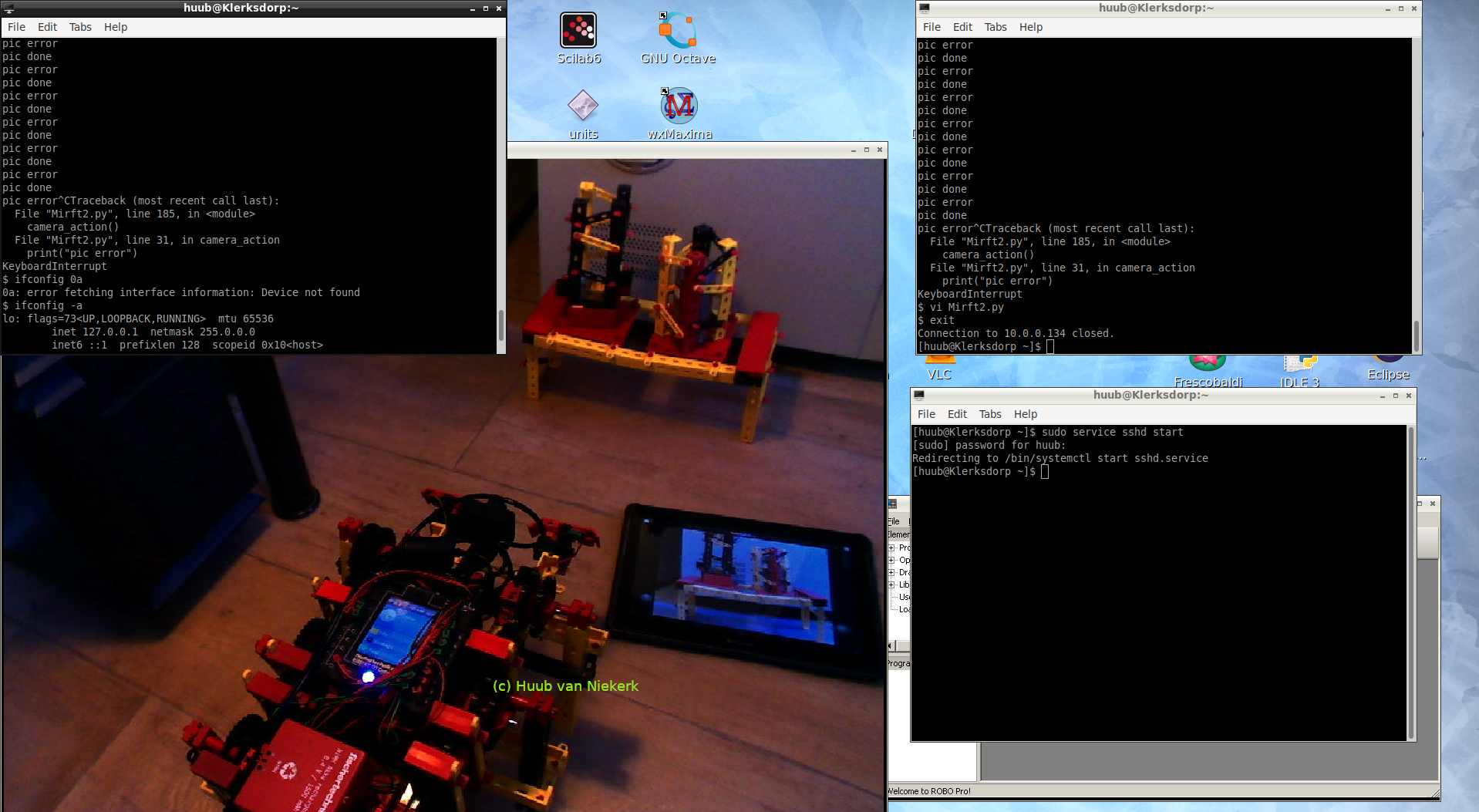
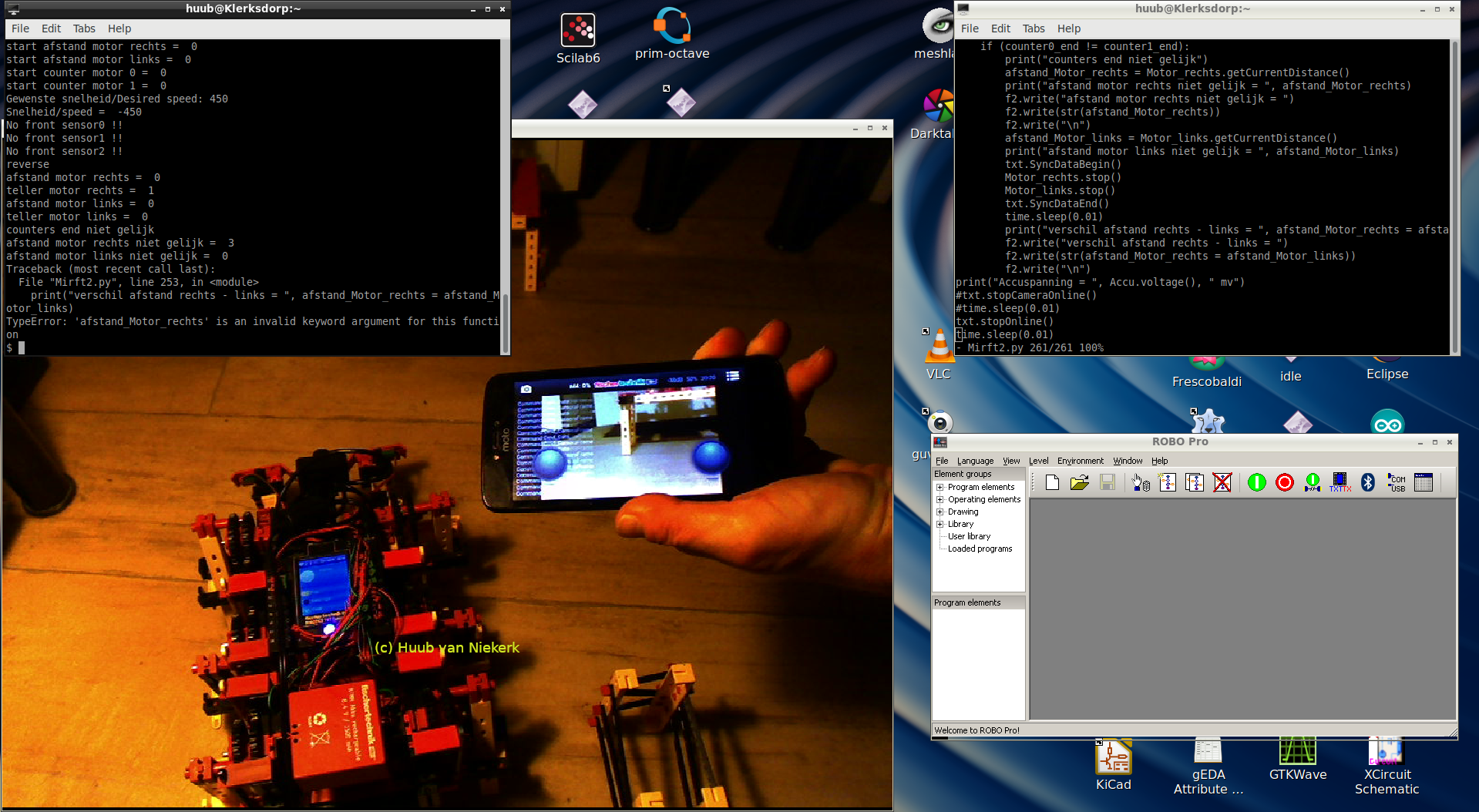
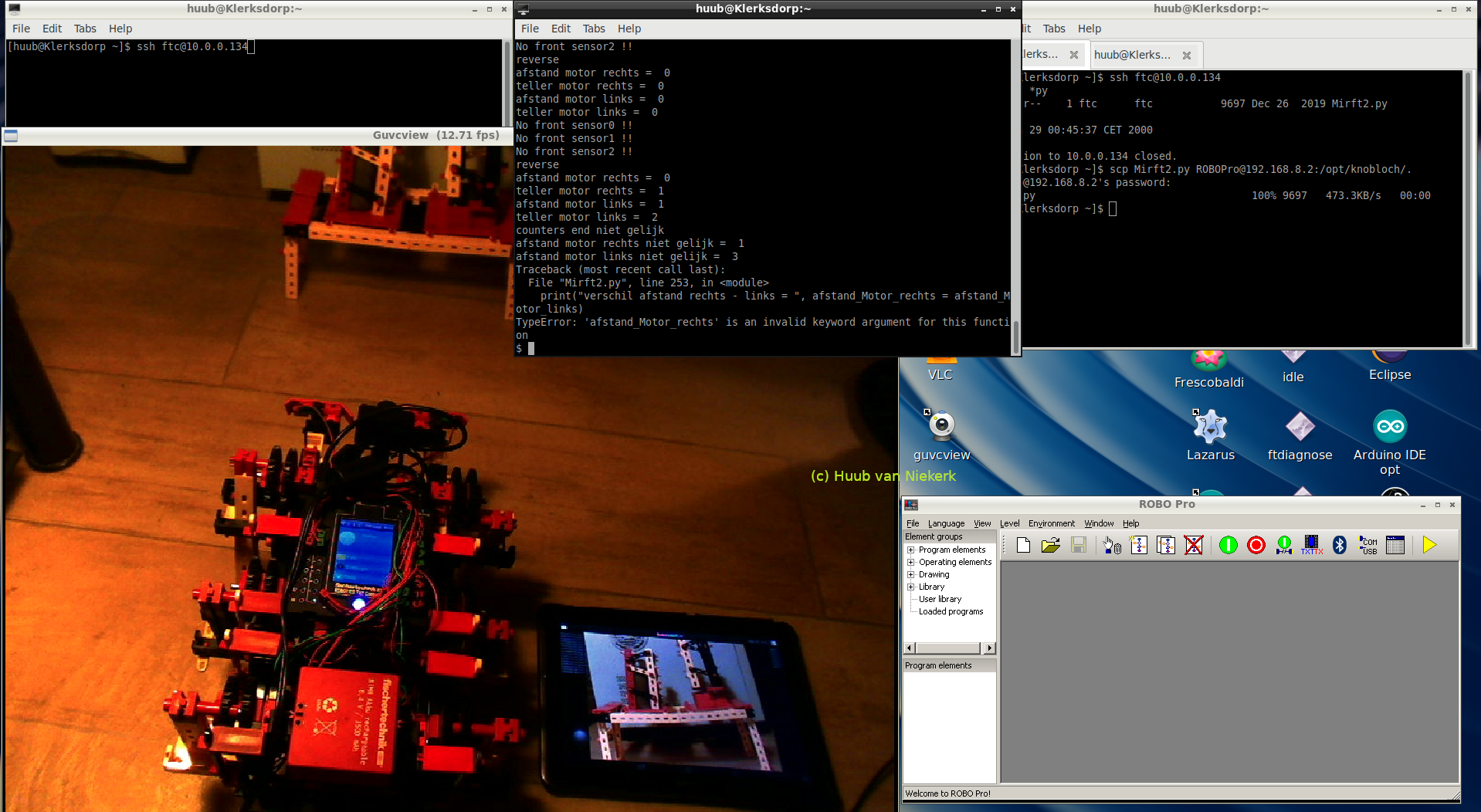
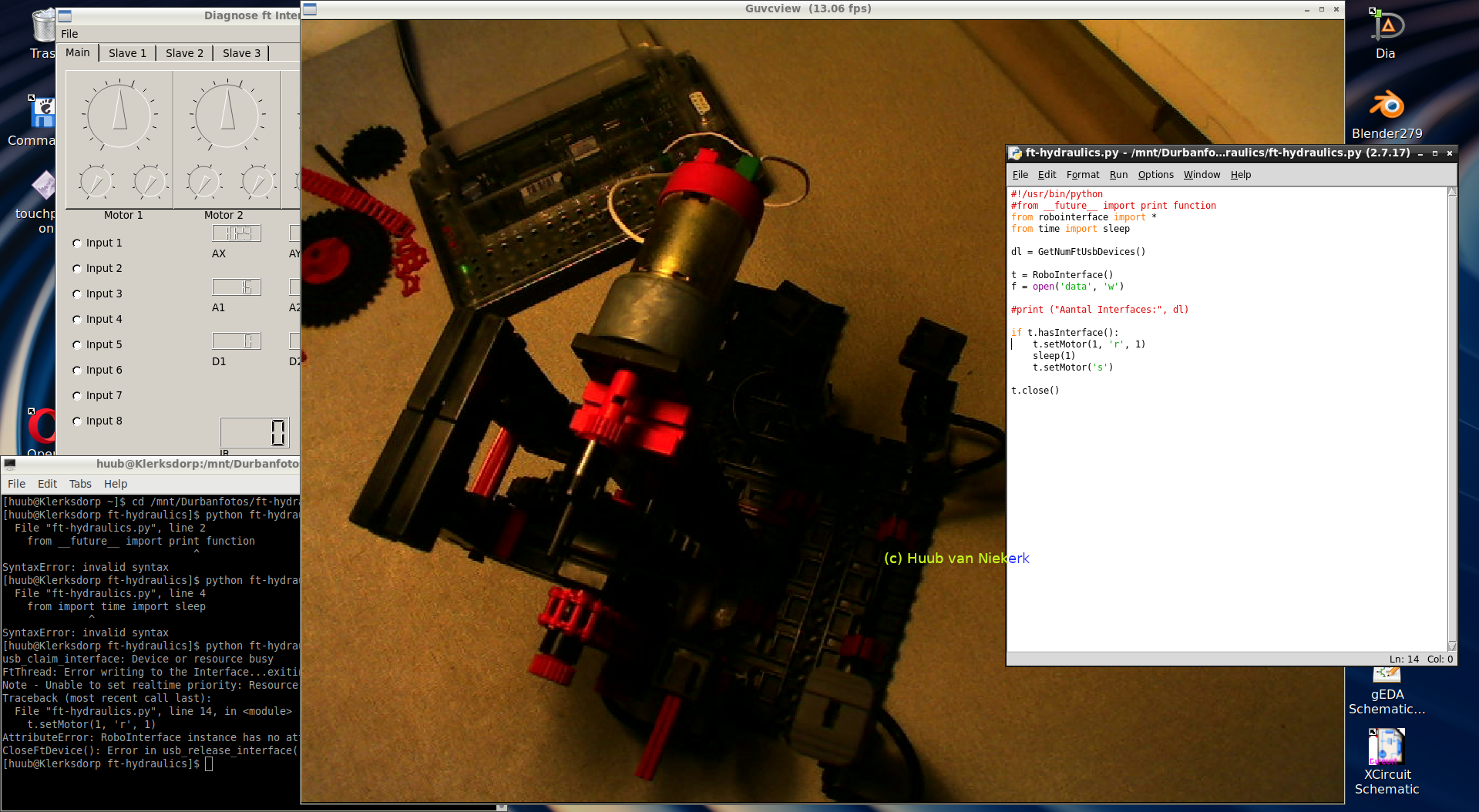
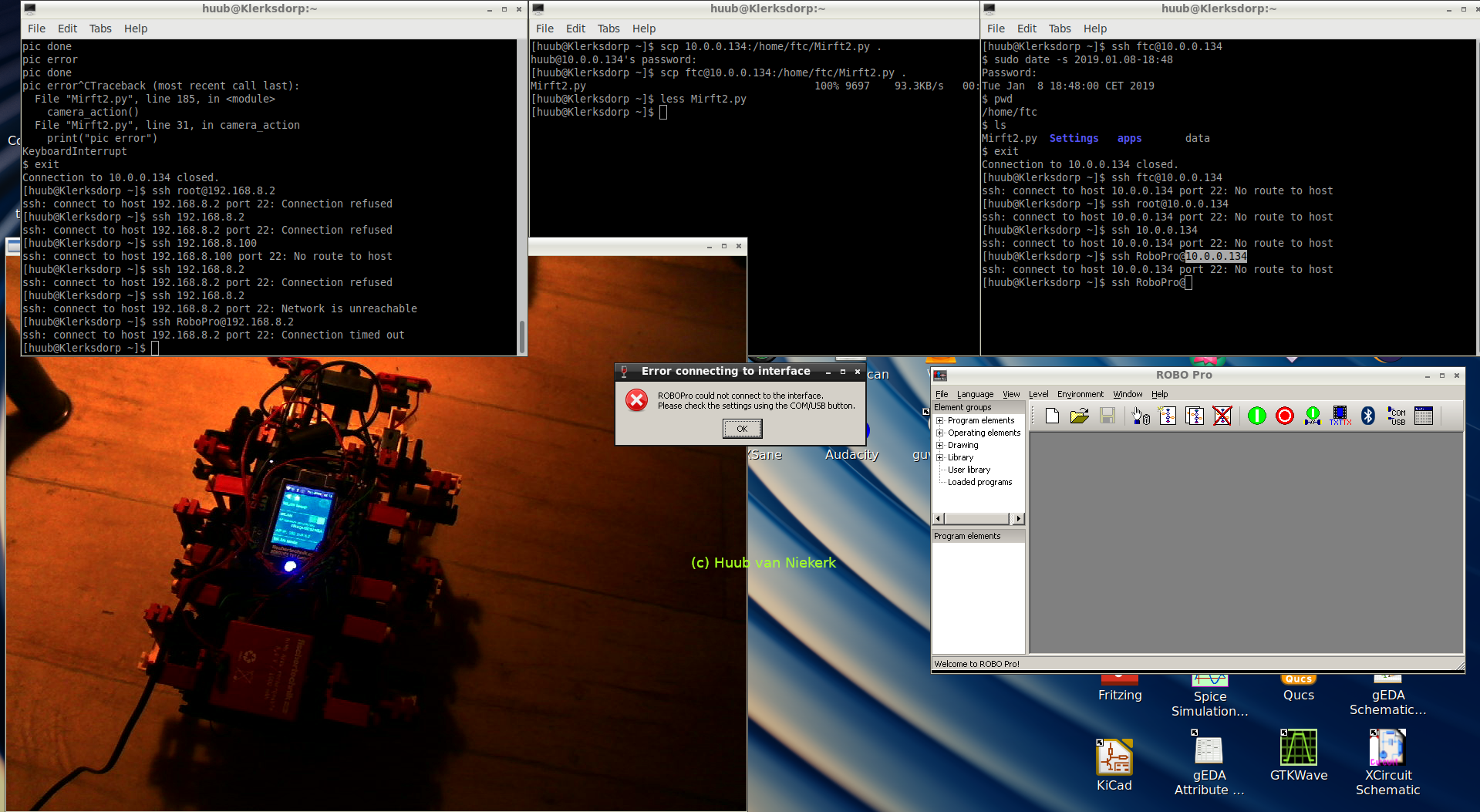
Mirft2: Another attempt using the Community firmware: what's the reason the code doesn't work? This leads to regained insights and some changes to the Python code are necessary. Click the image to watch the video.
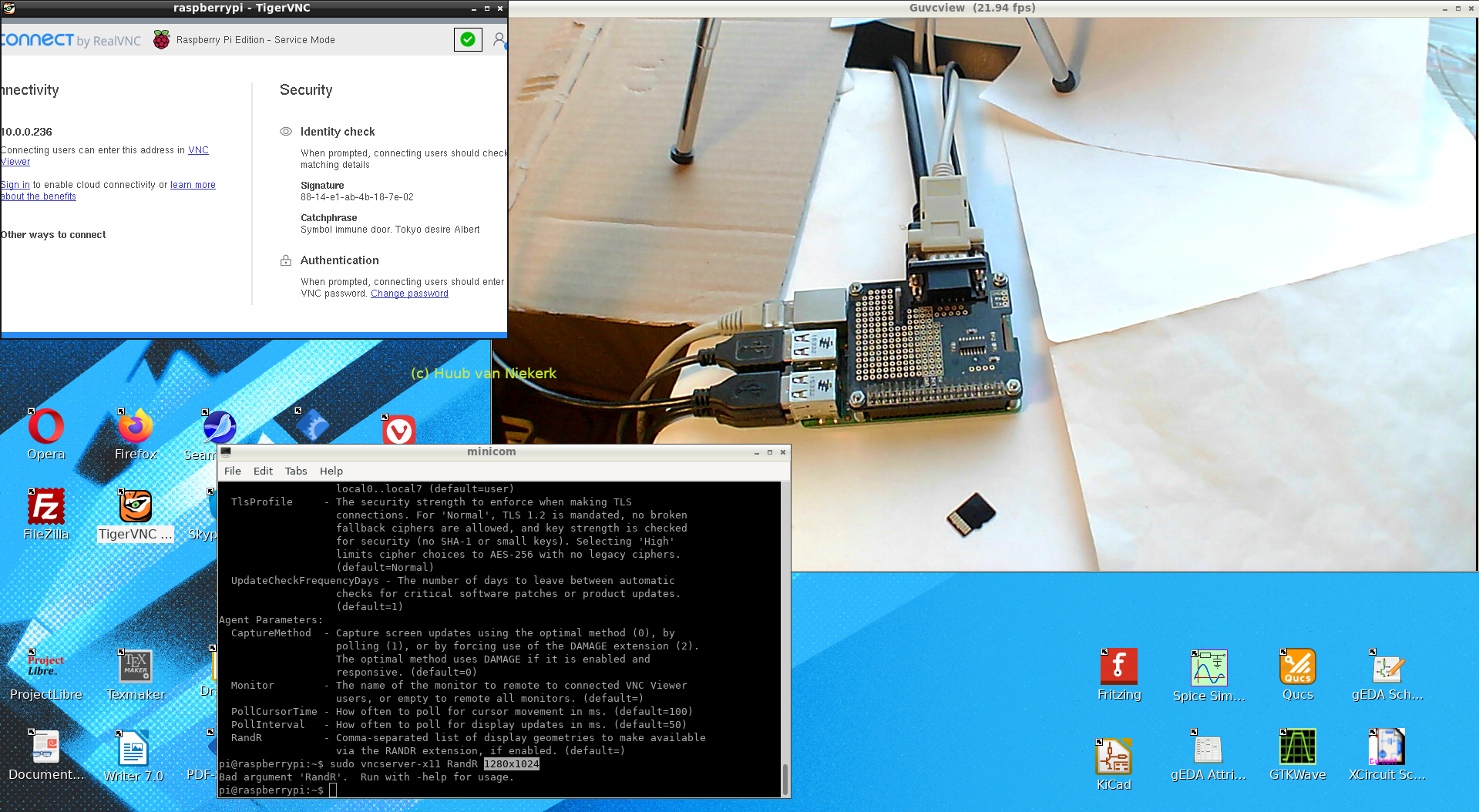
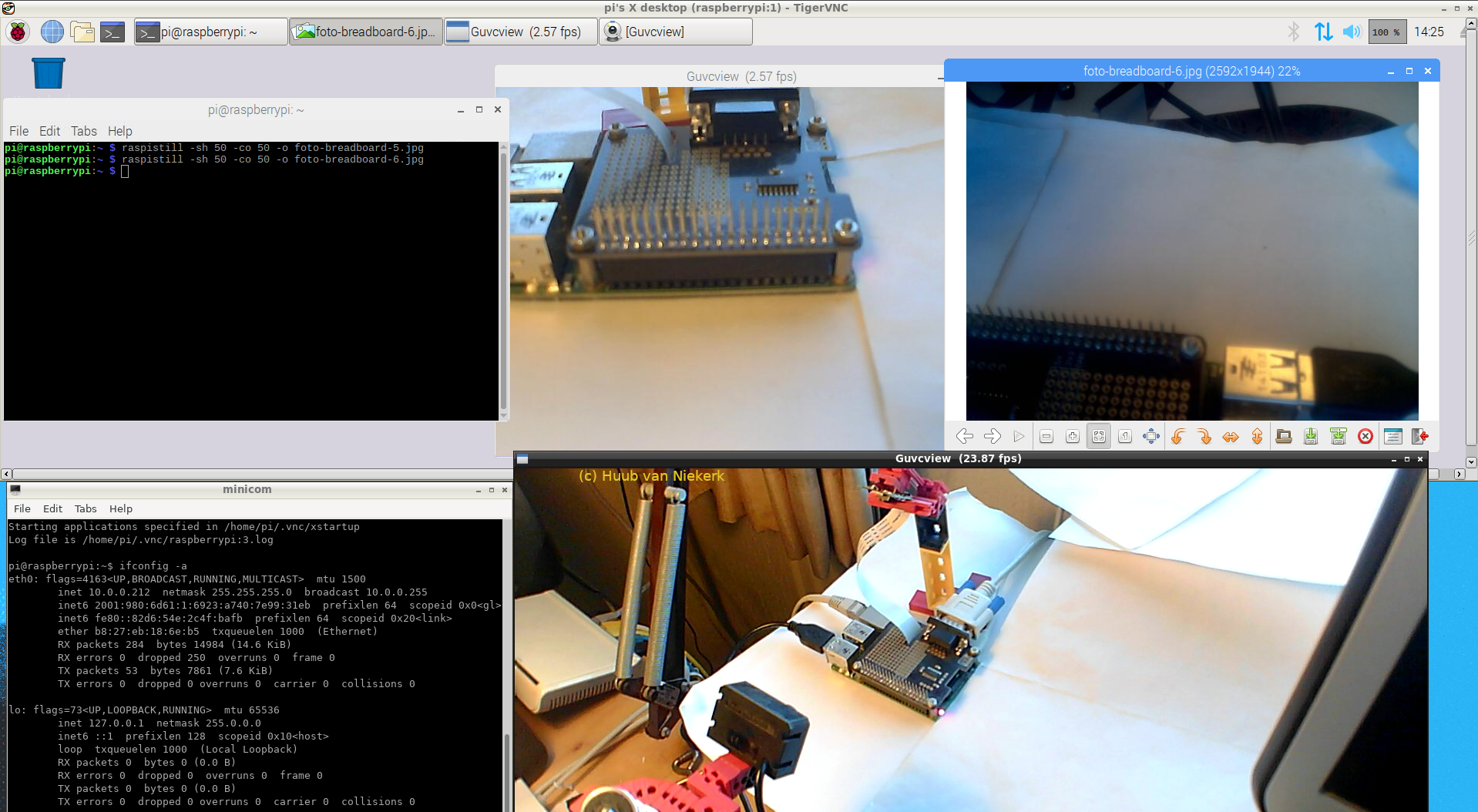
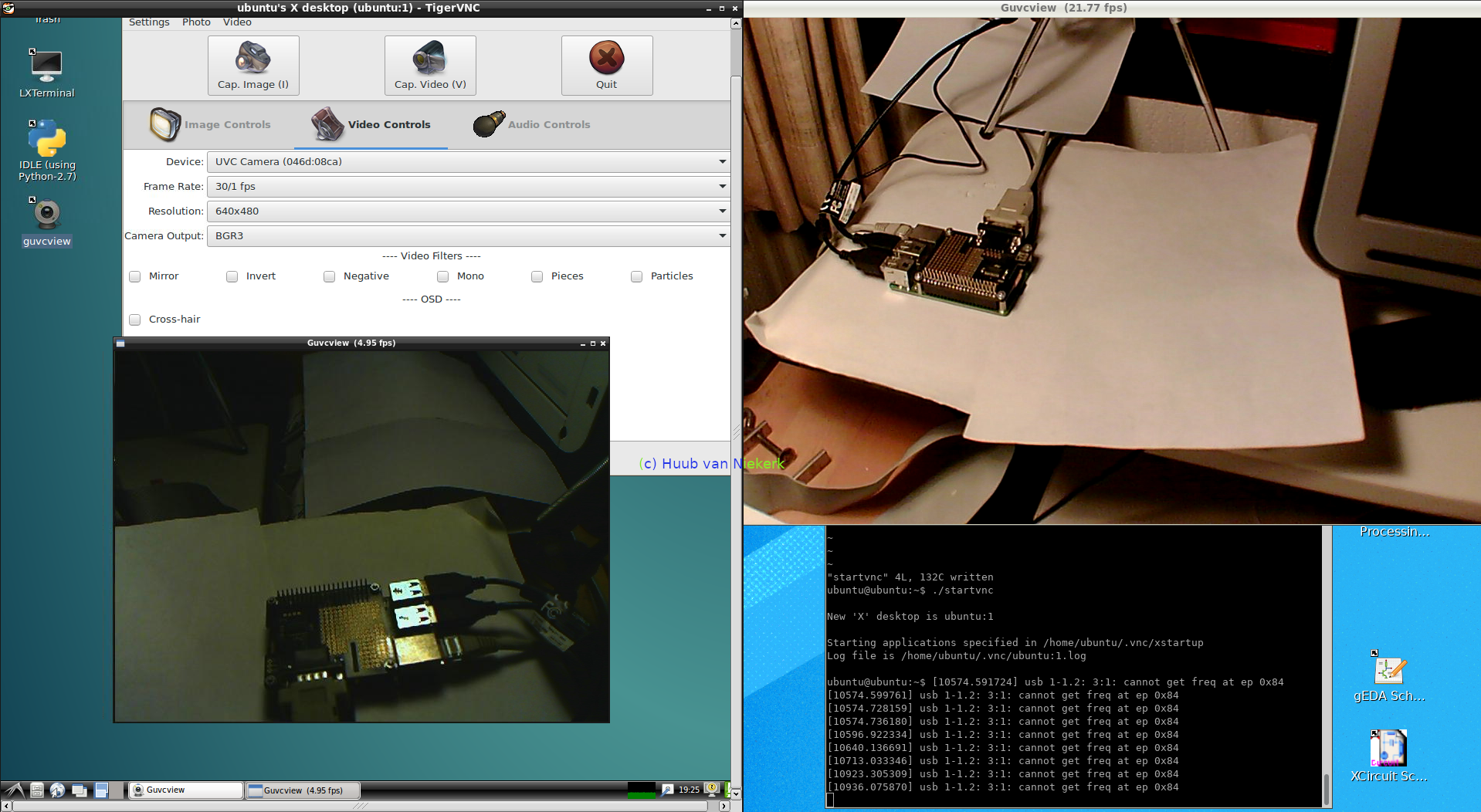
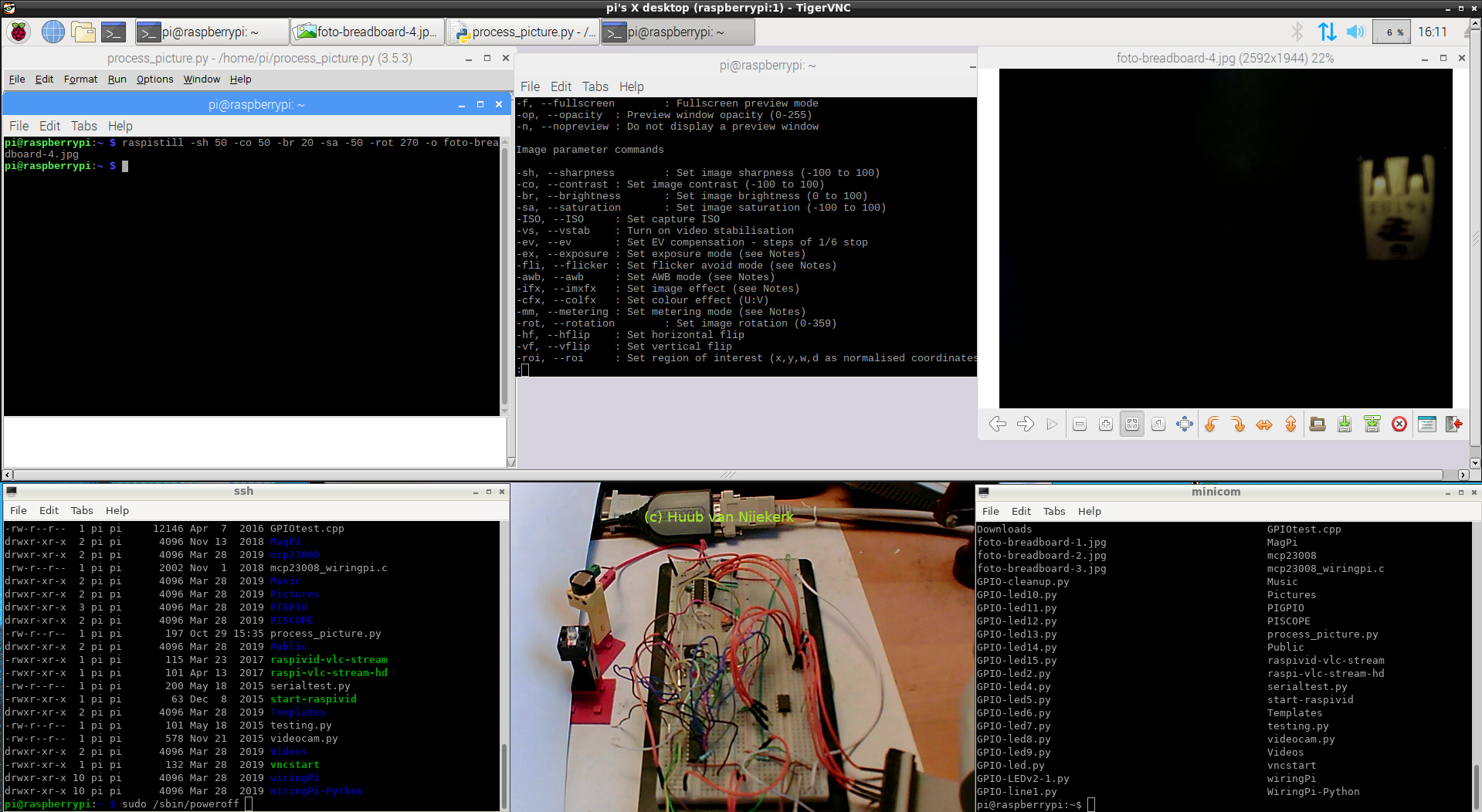
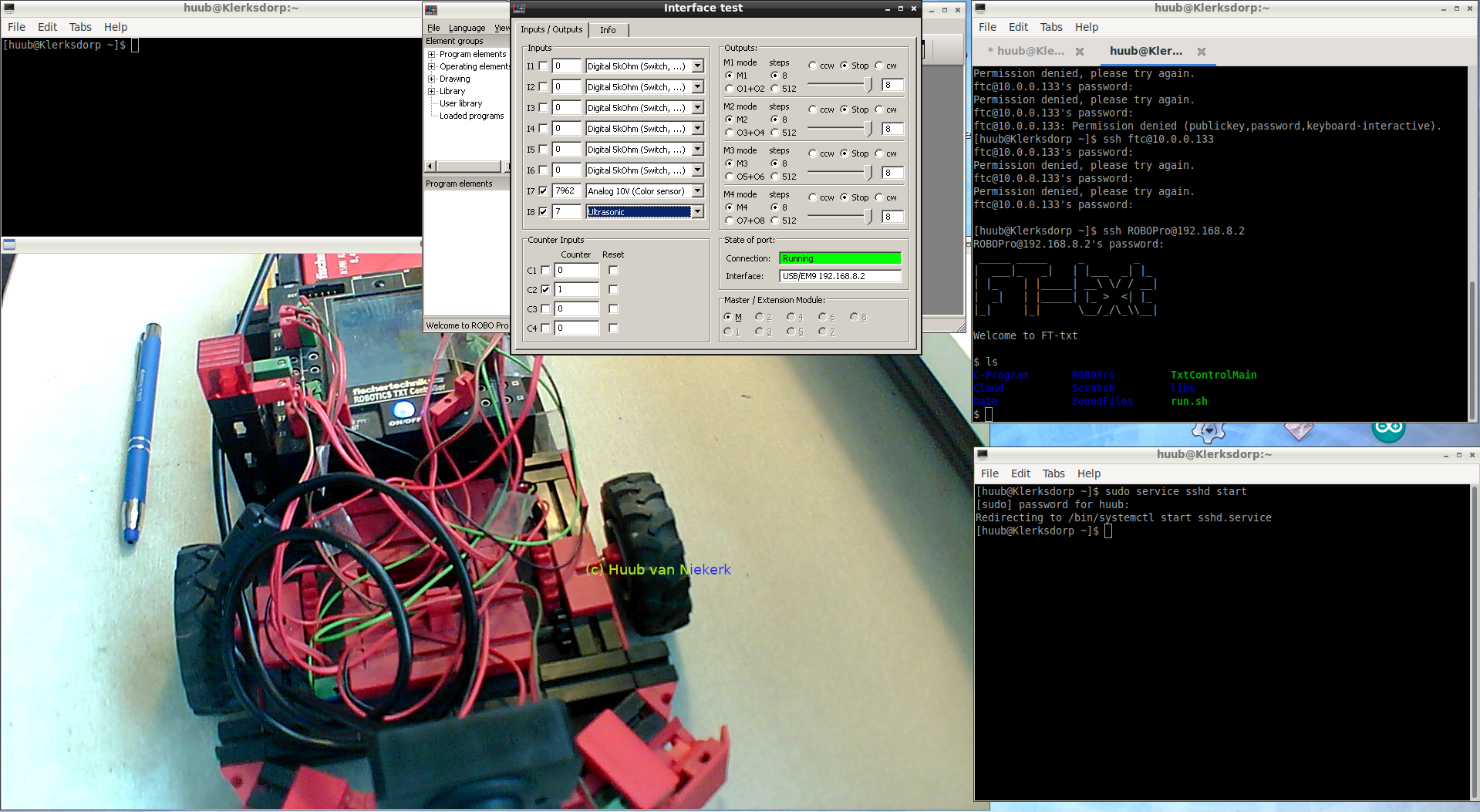
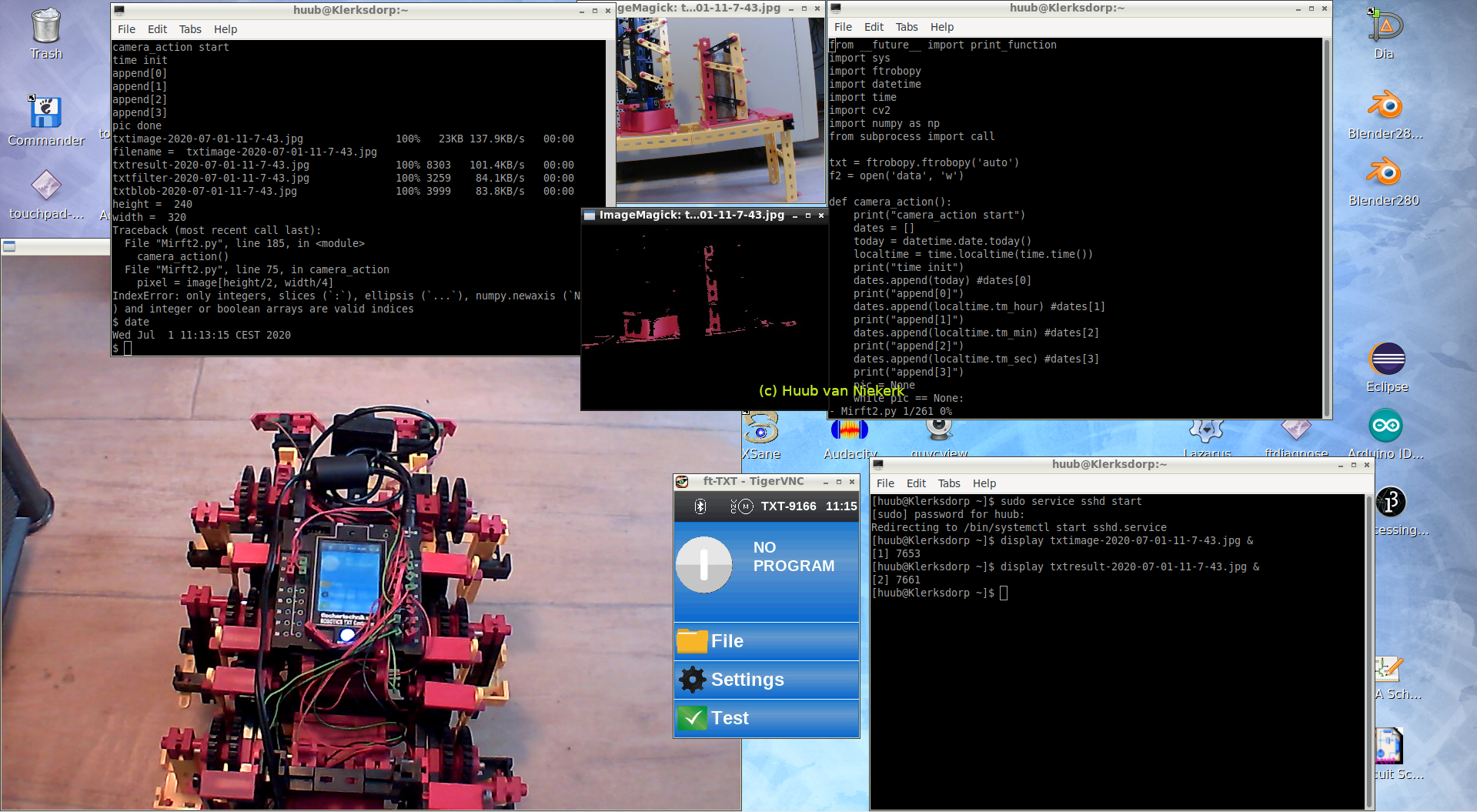
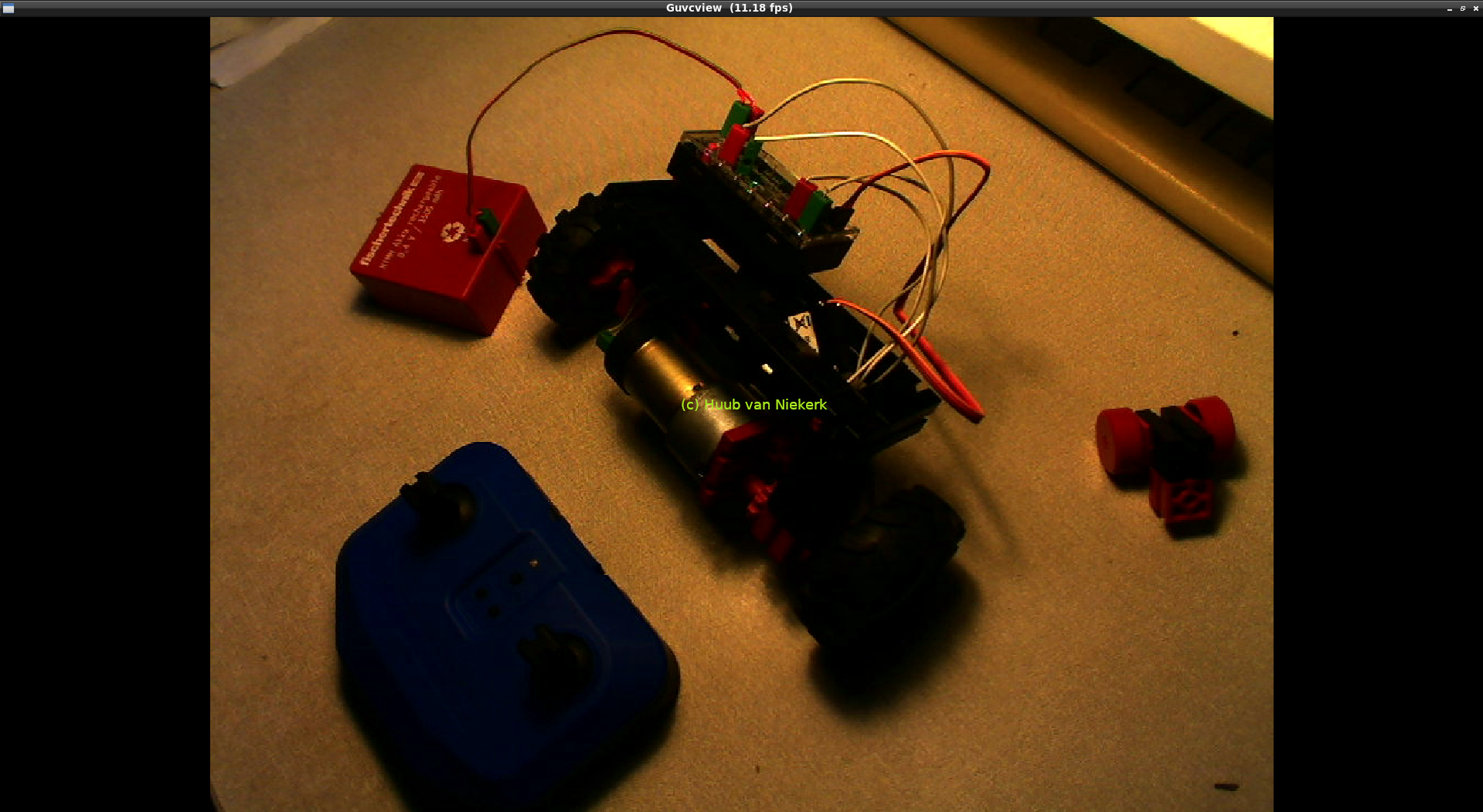
RaspberryPi2 & camera: Third time on using a fischertechnik camera using guvcview, this time with a few oopses. Click the image to watch the video.
25 December Blog 406
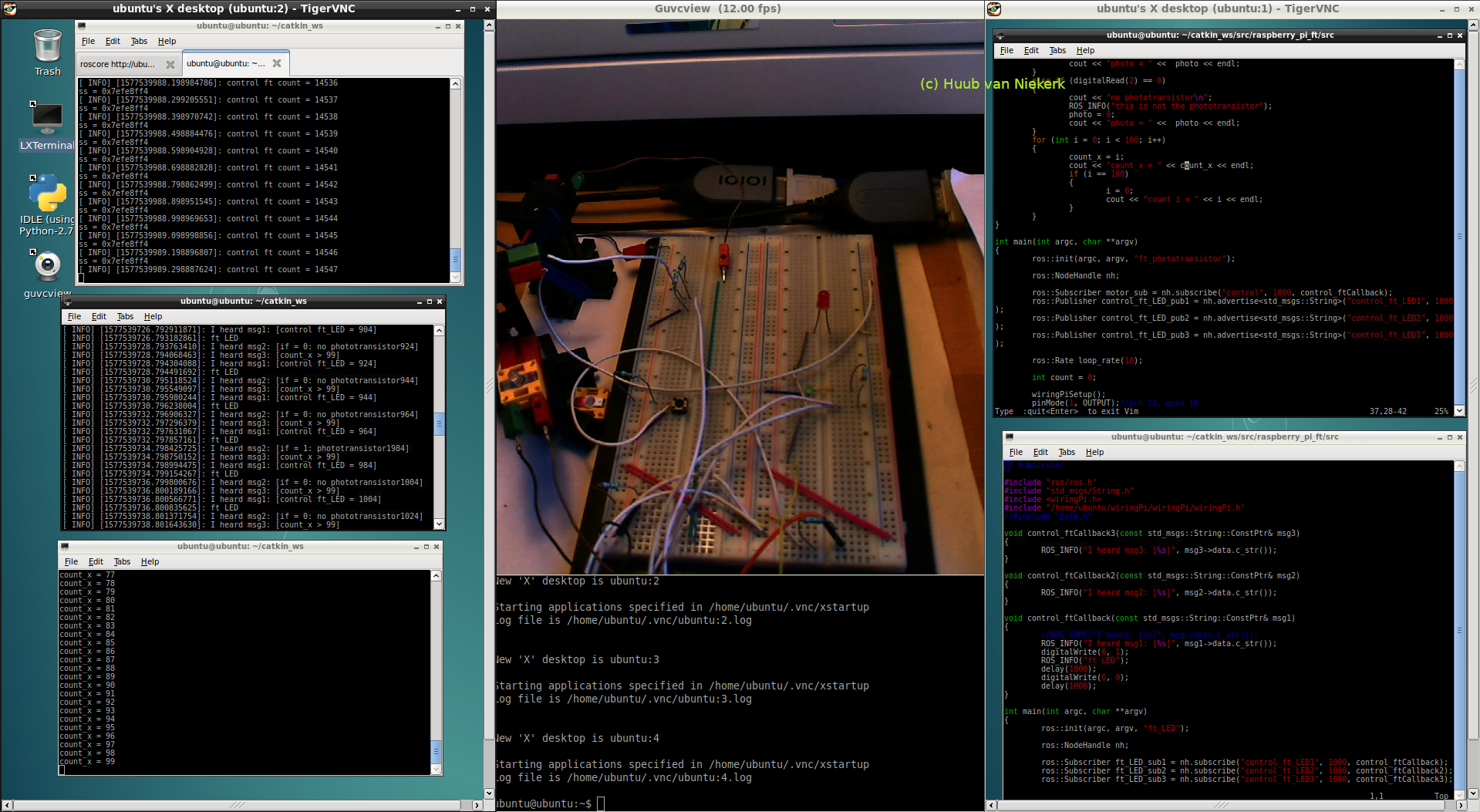
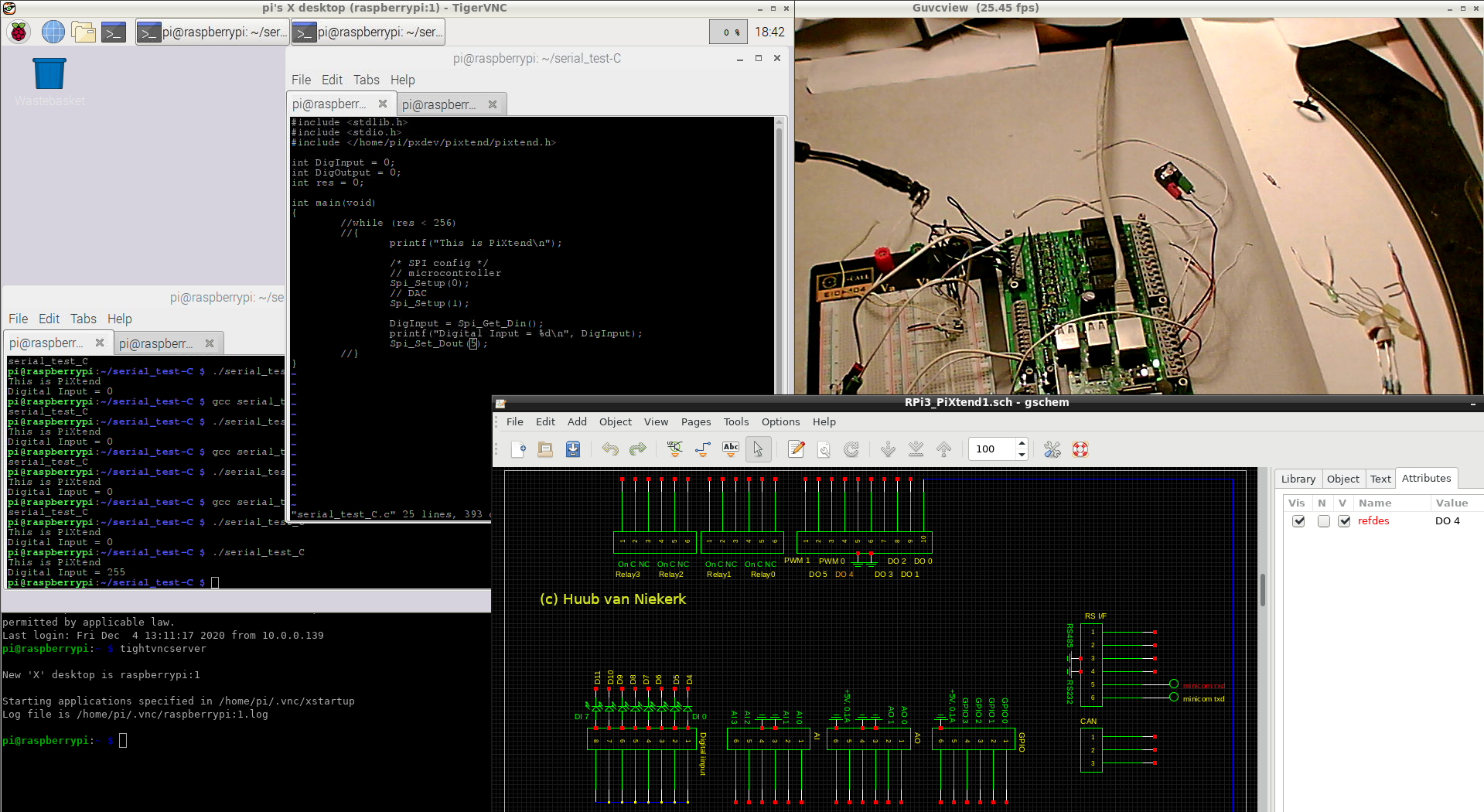
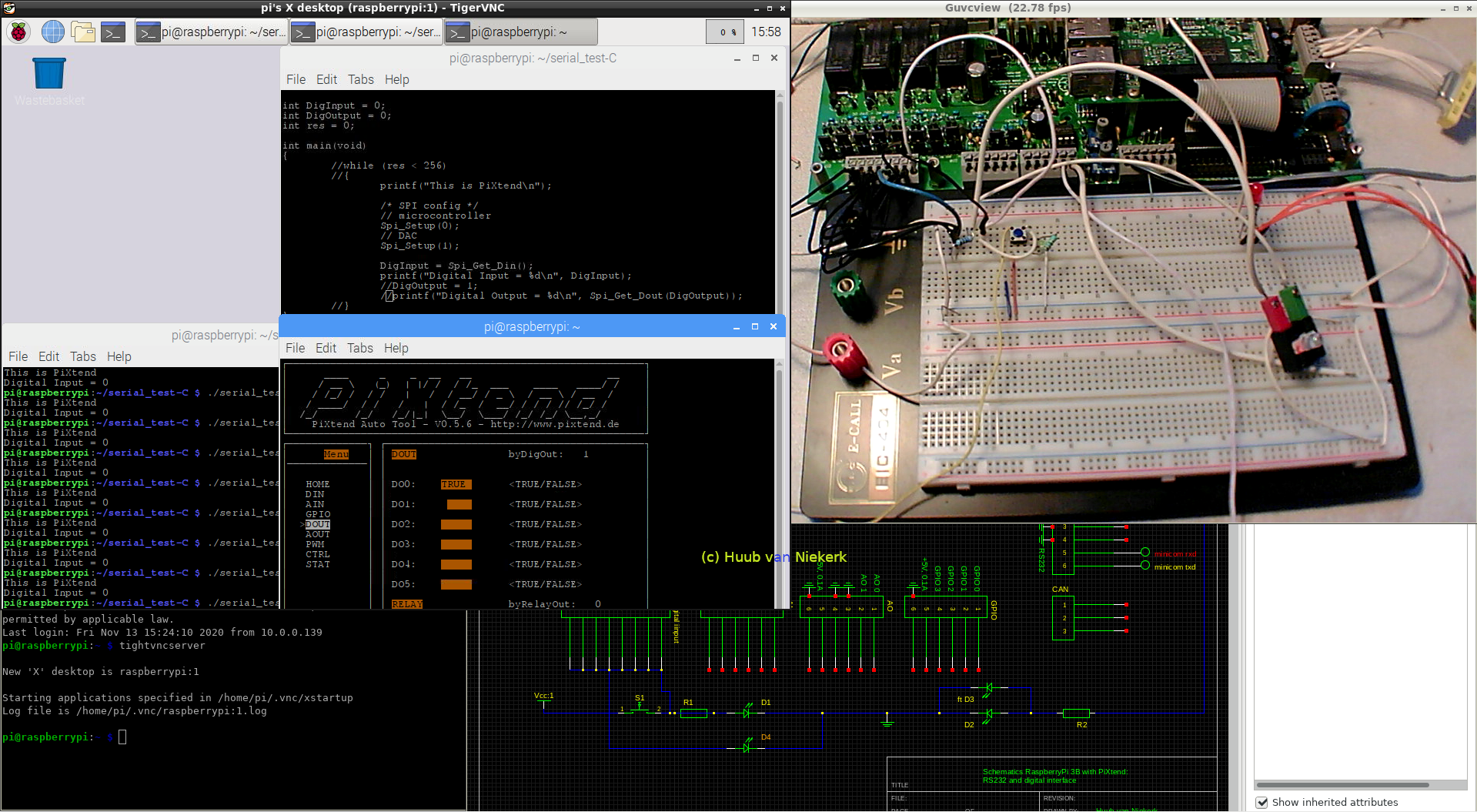
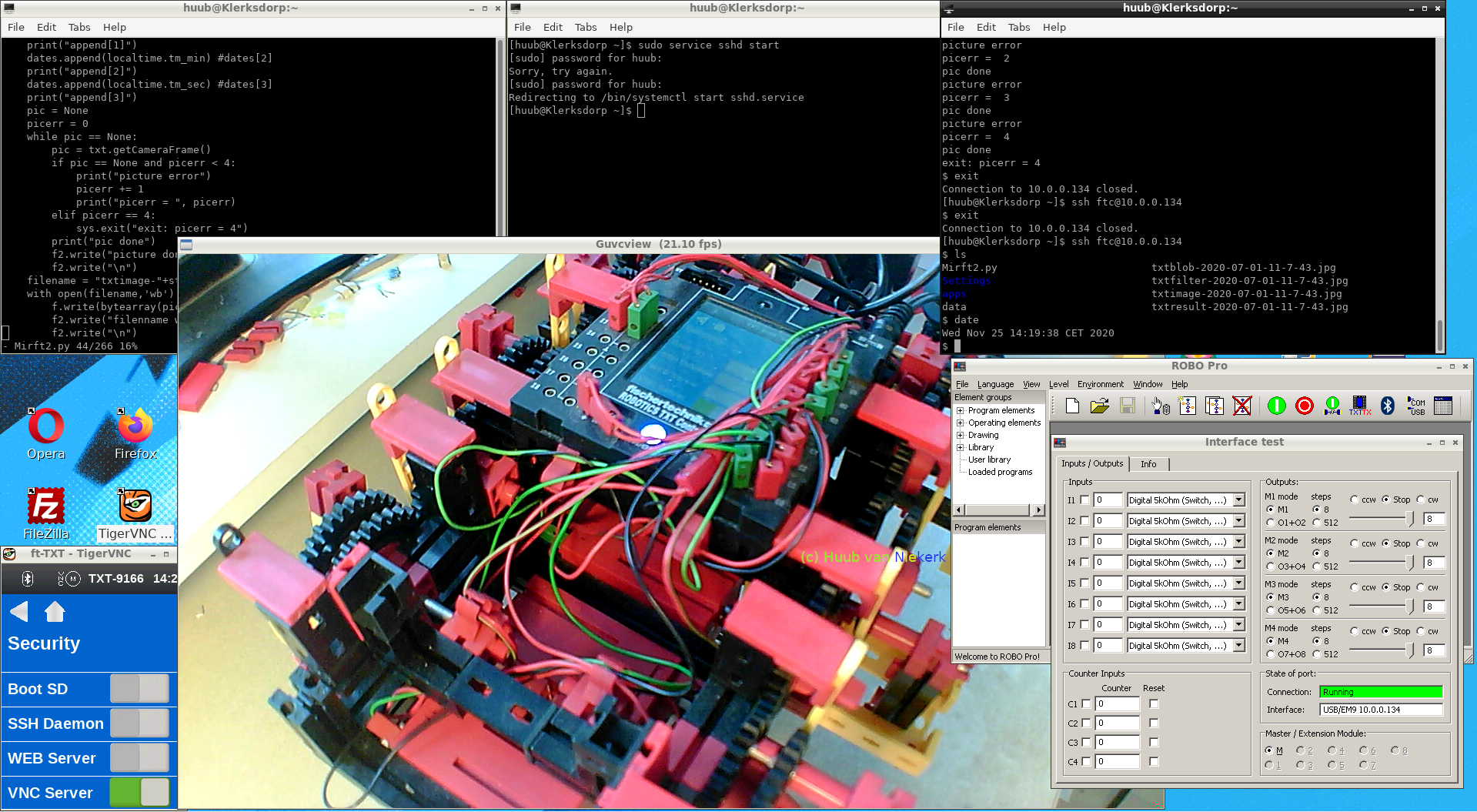
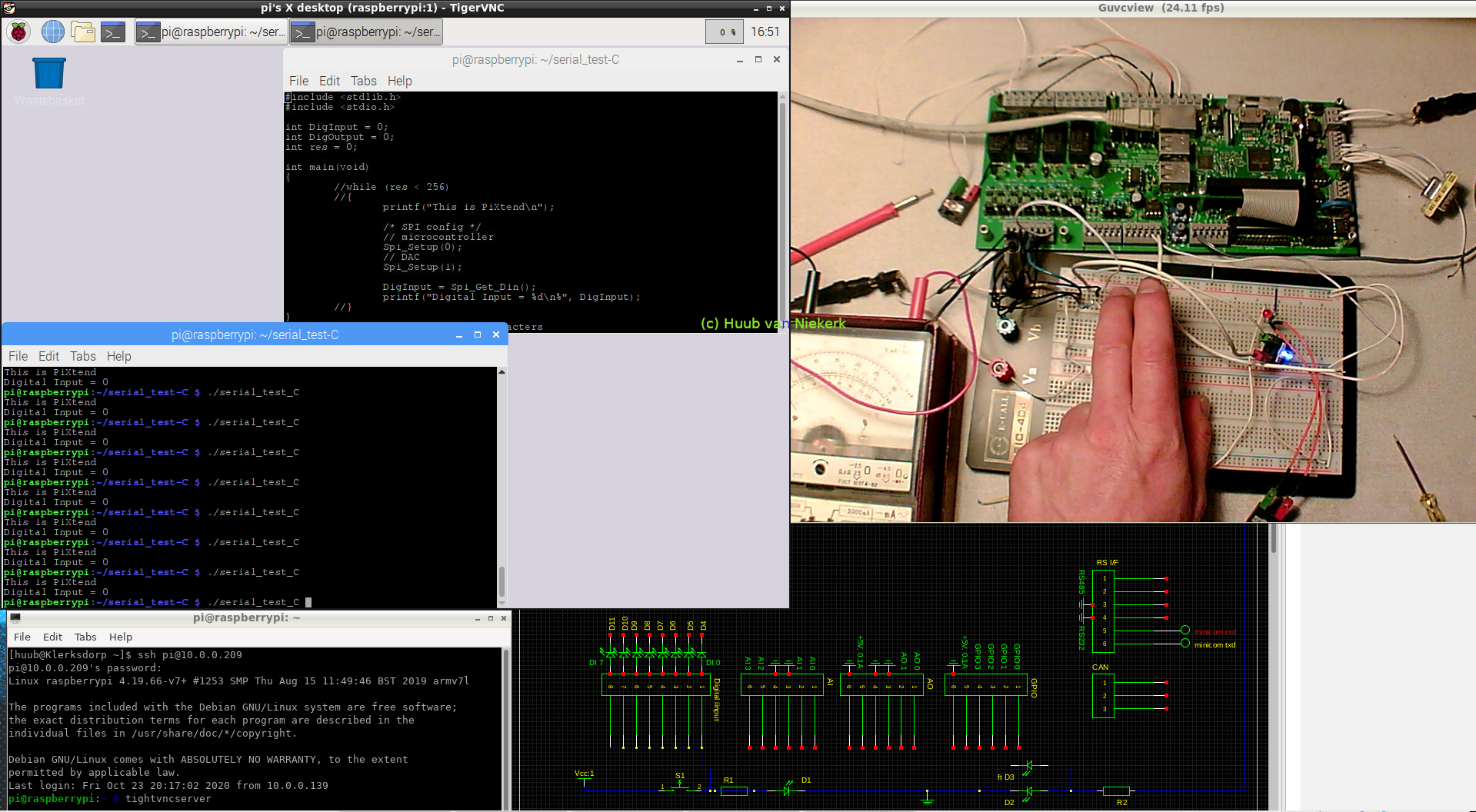
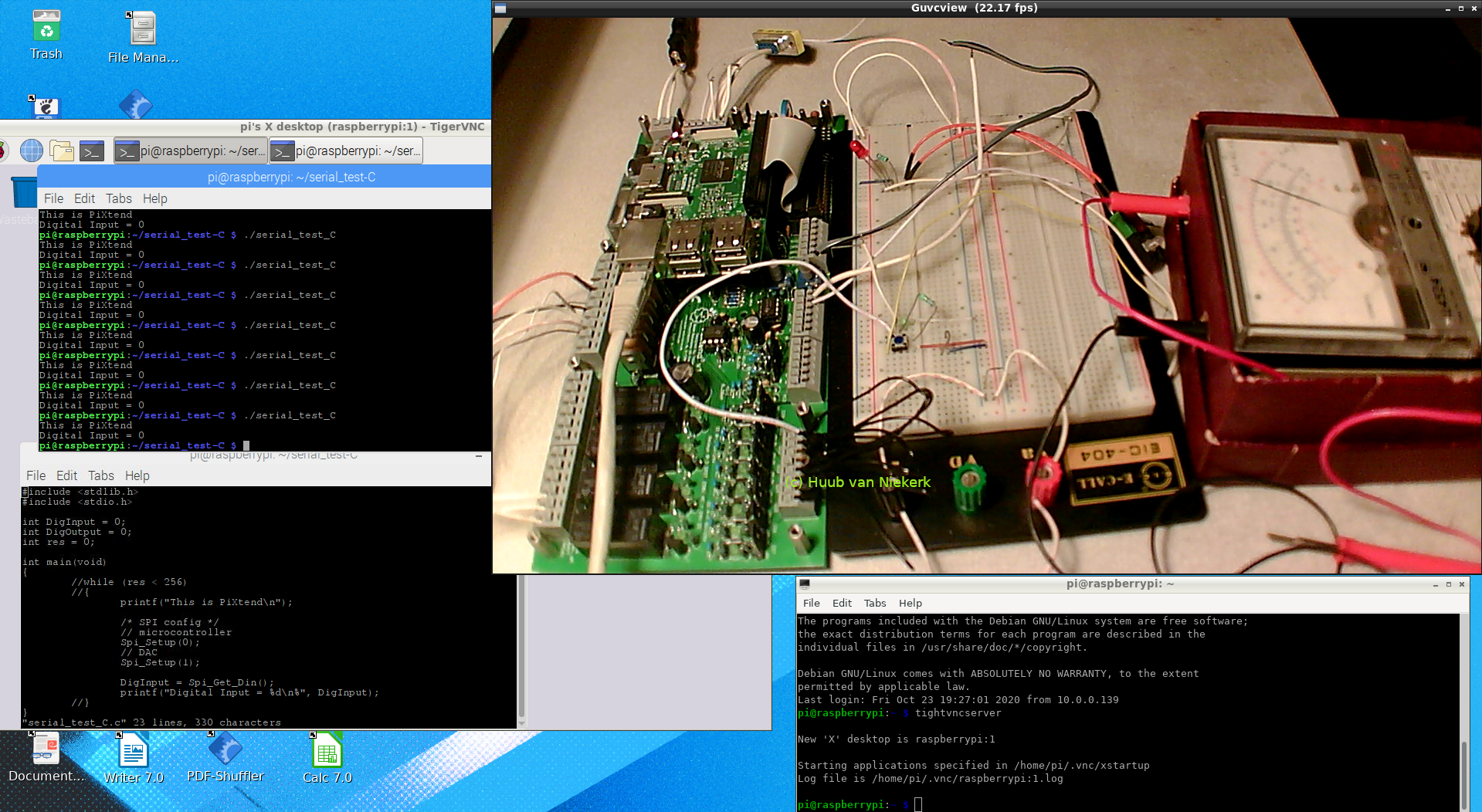
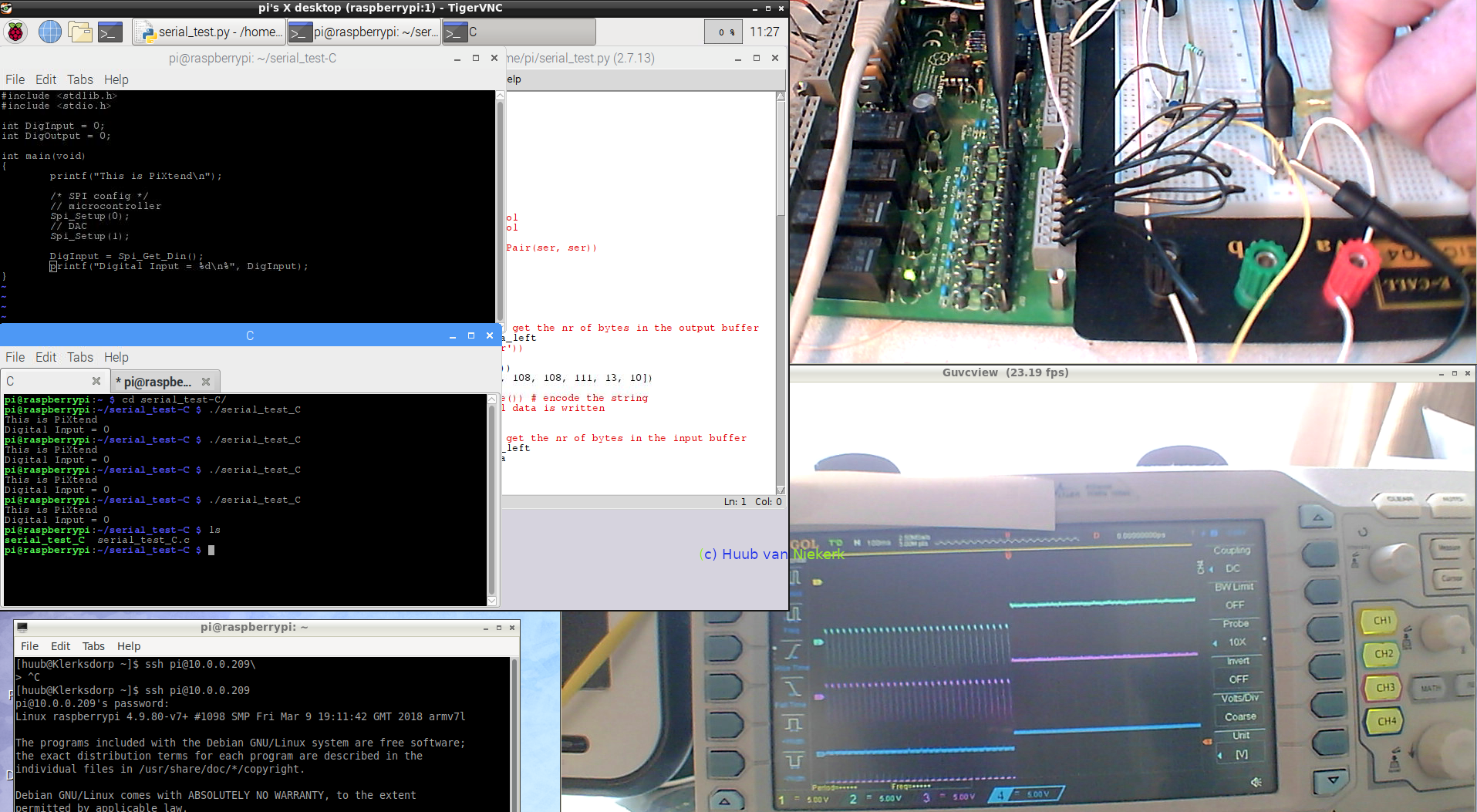
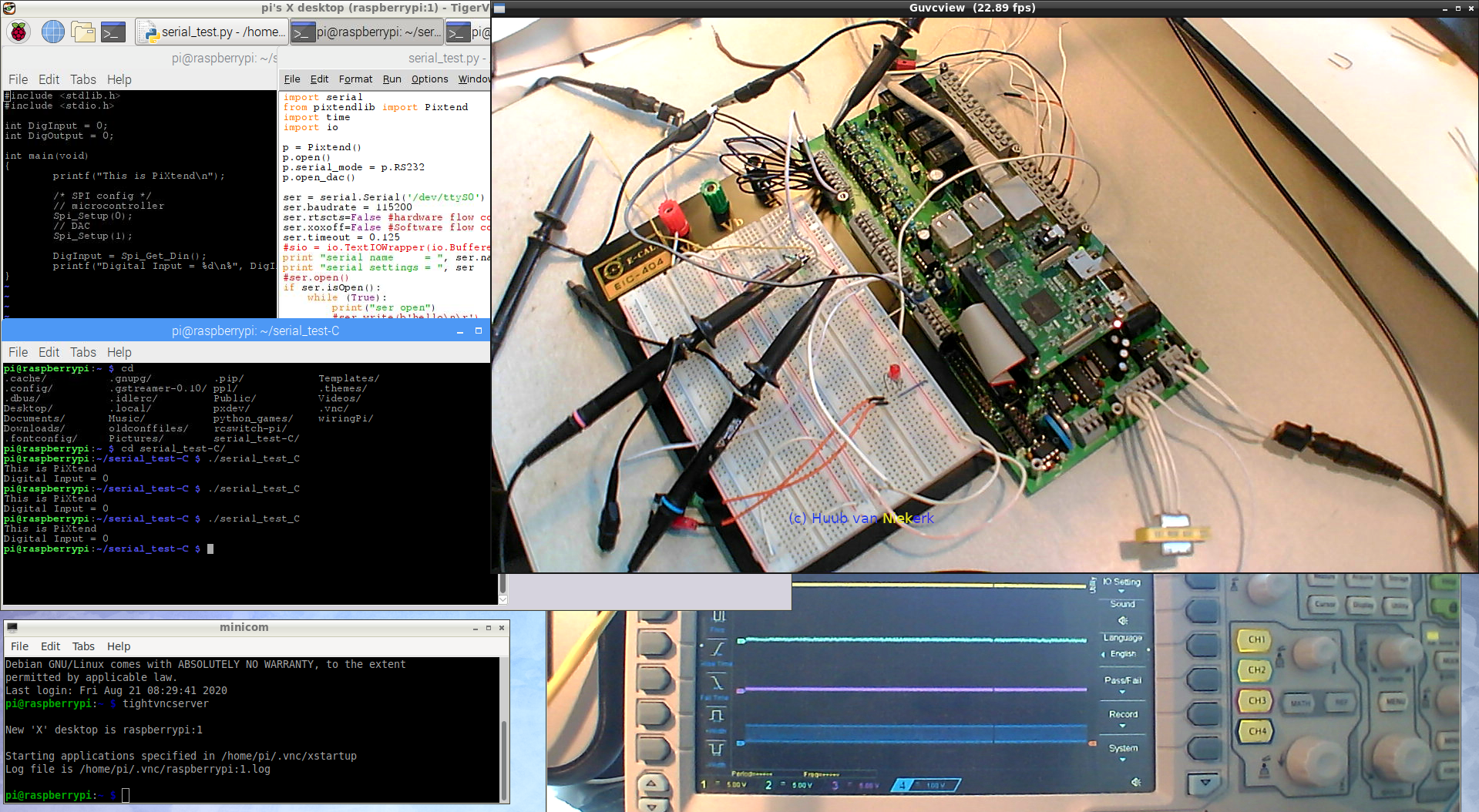
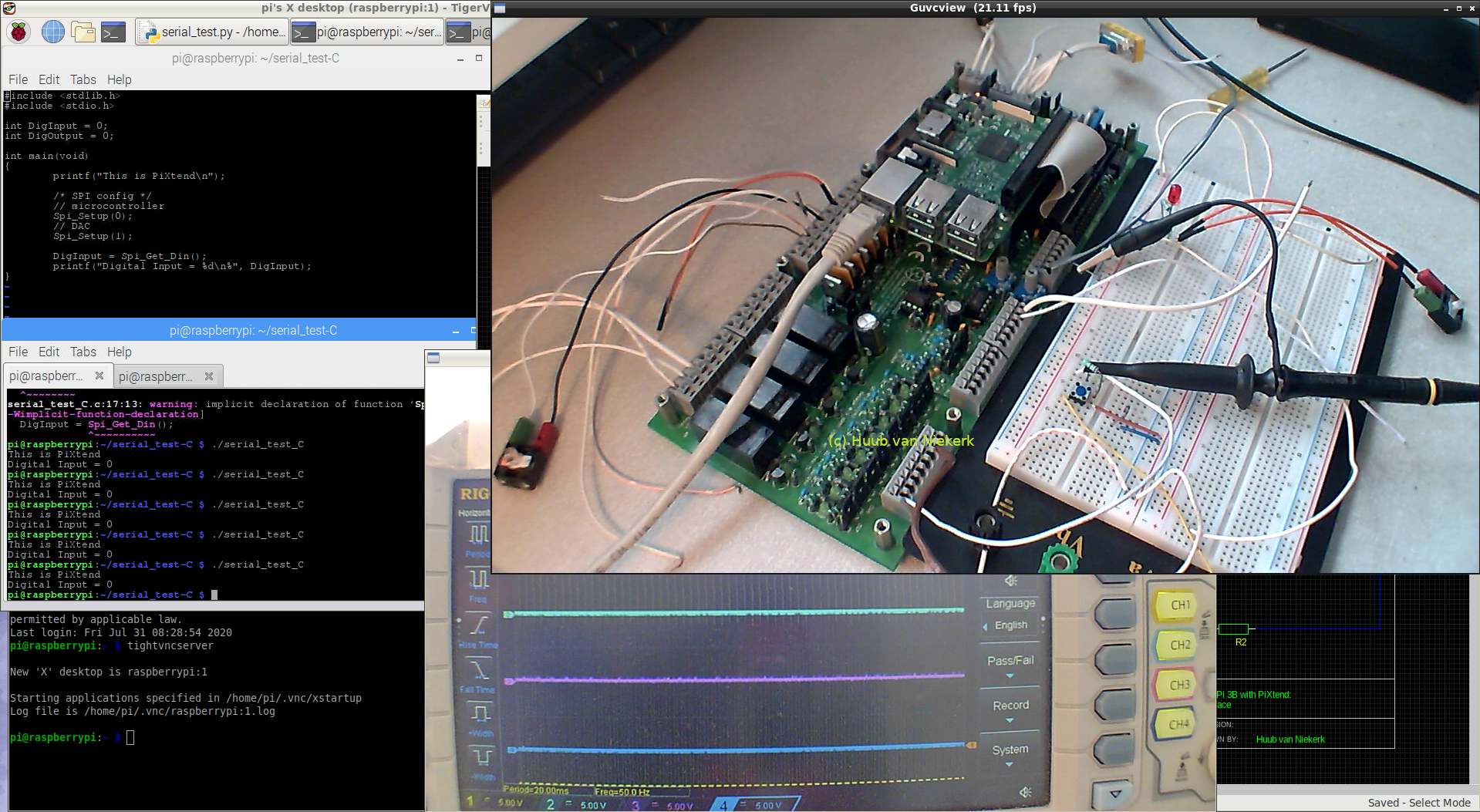
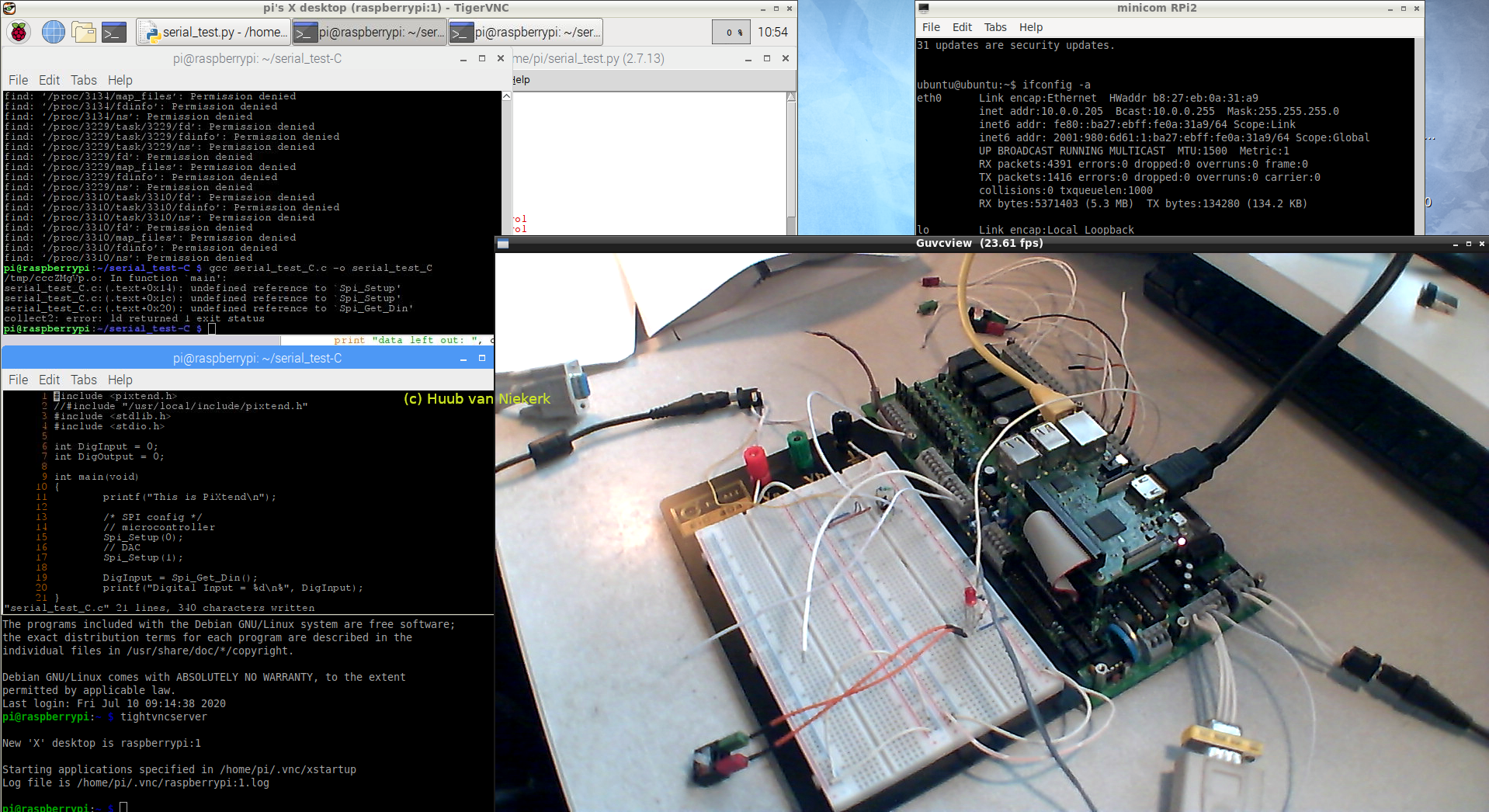
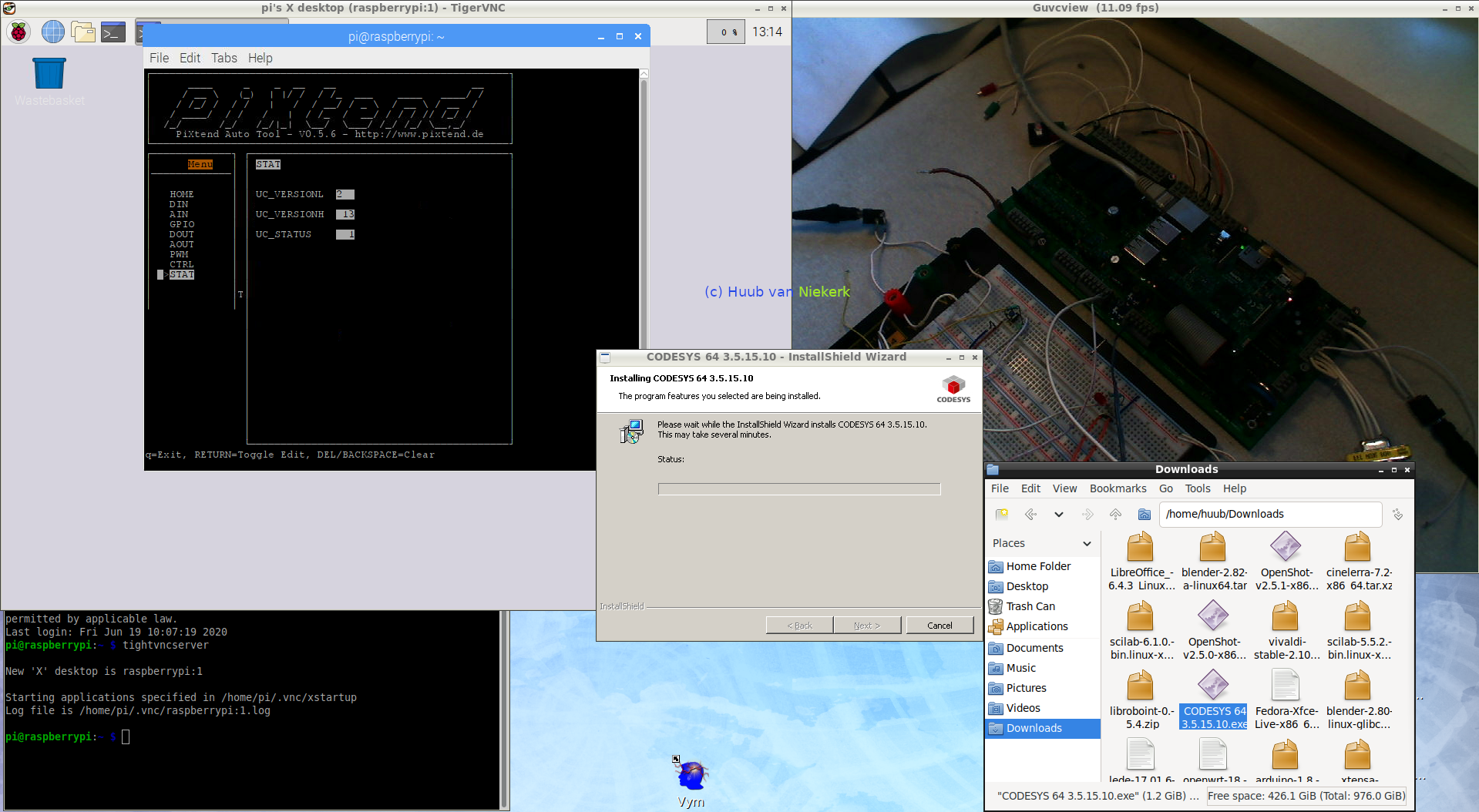
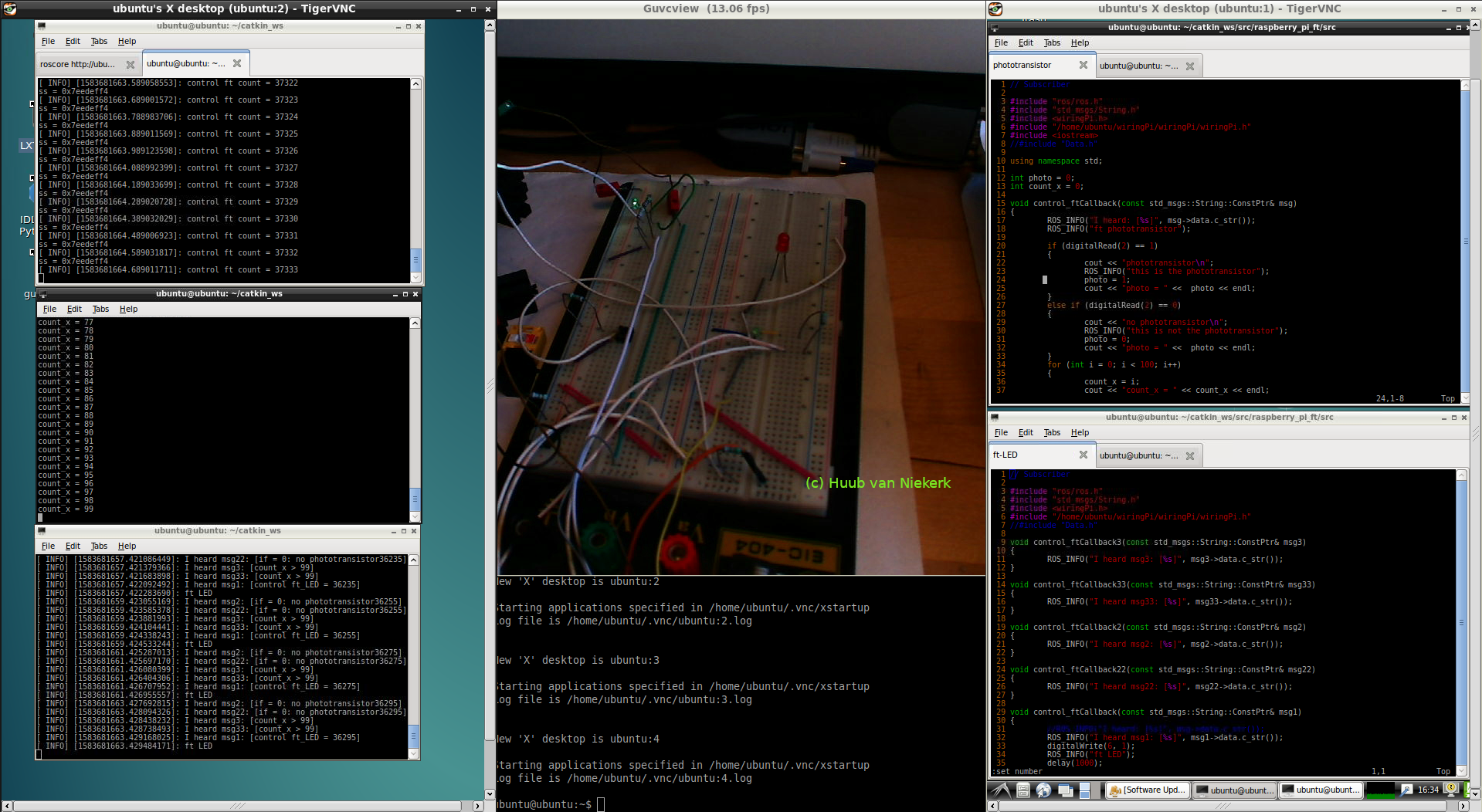
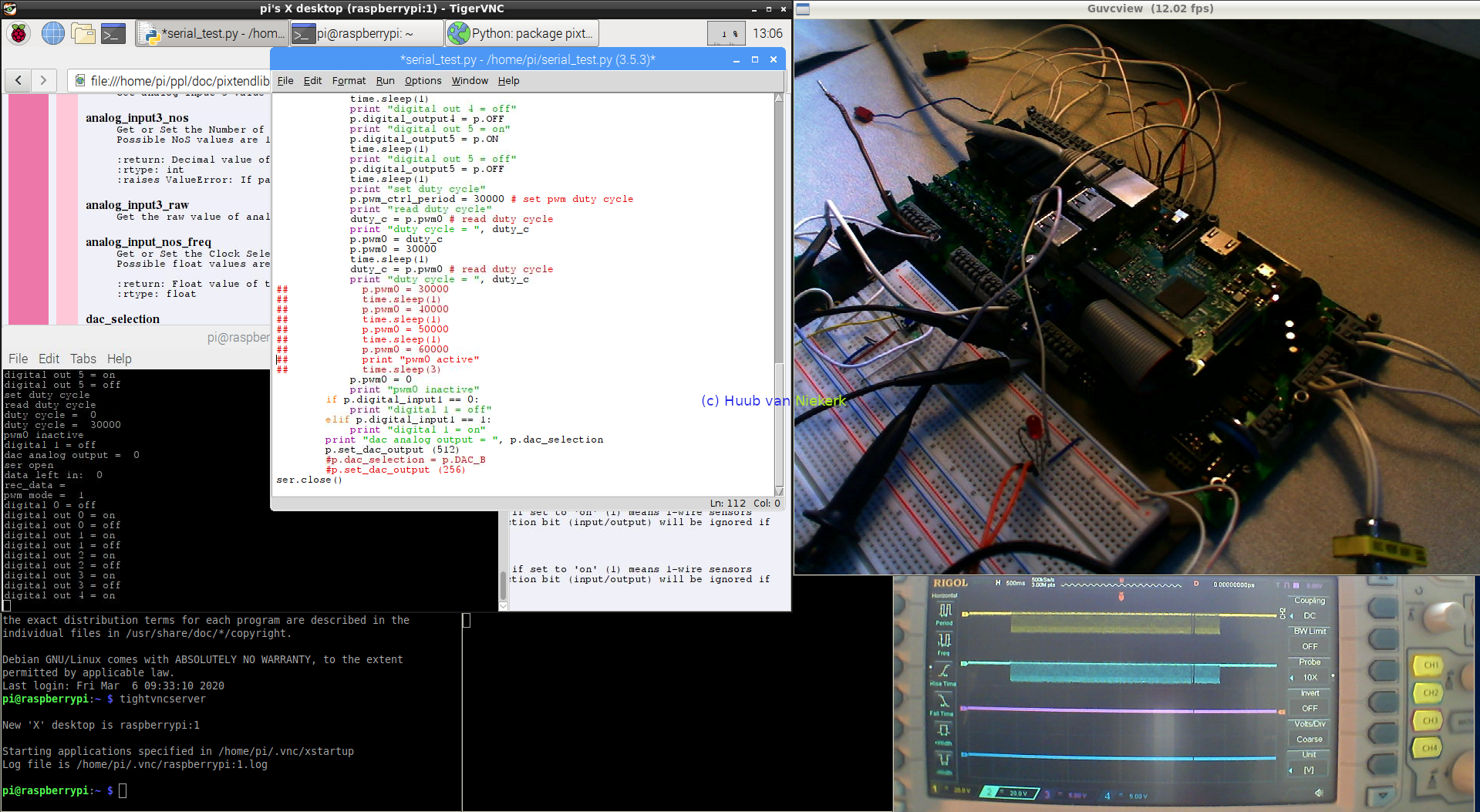
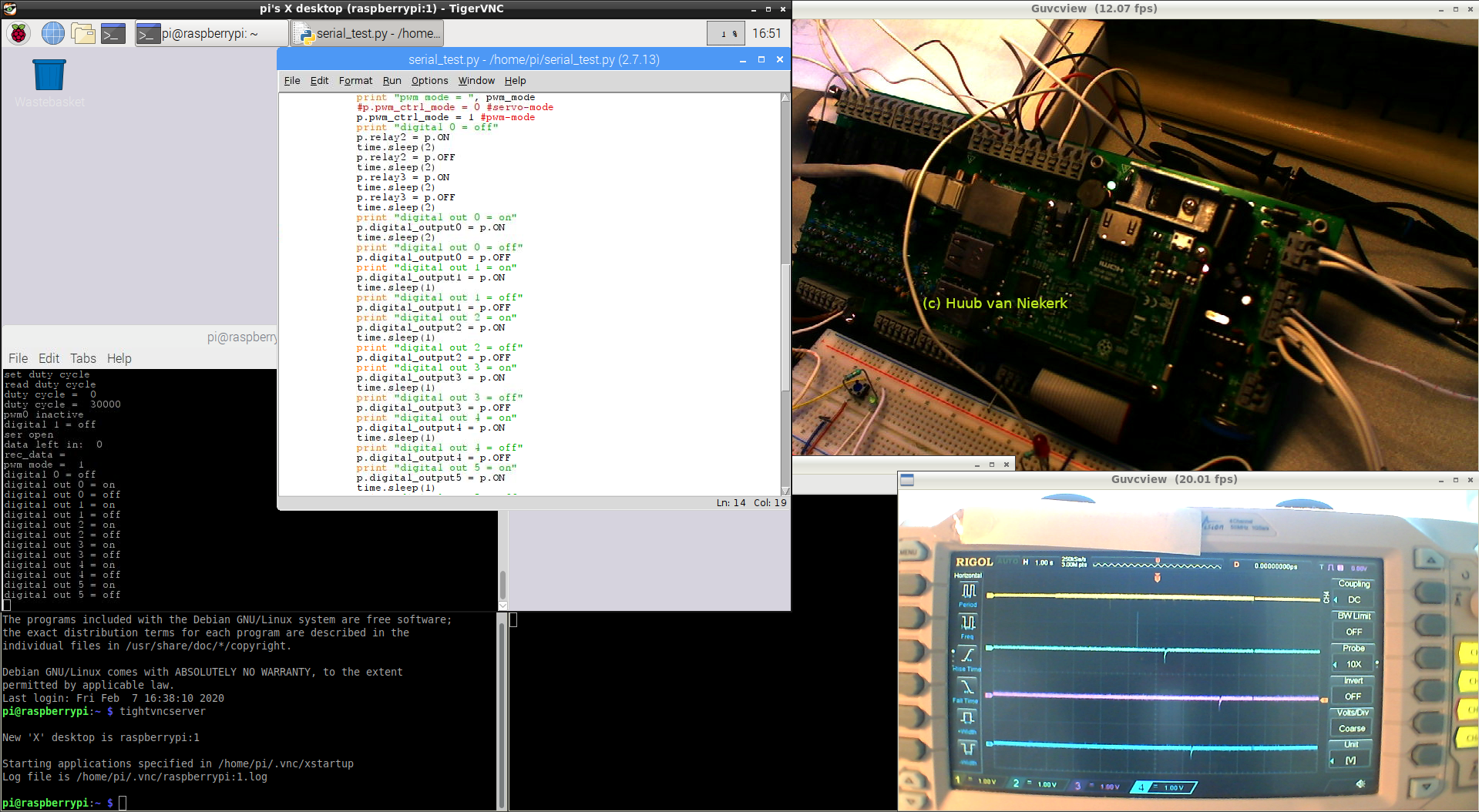
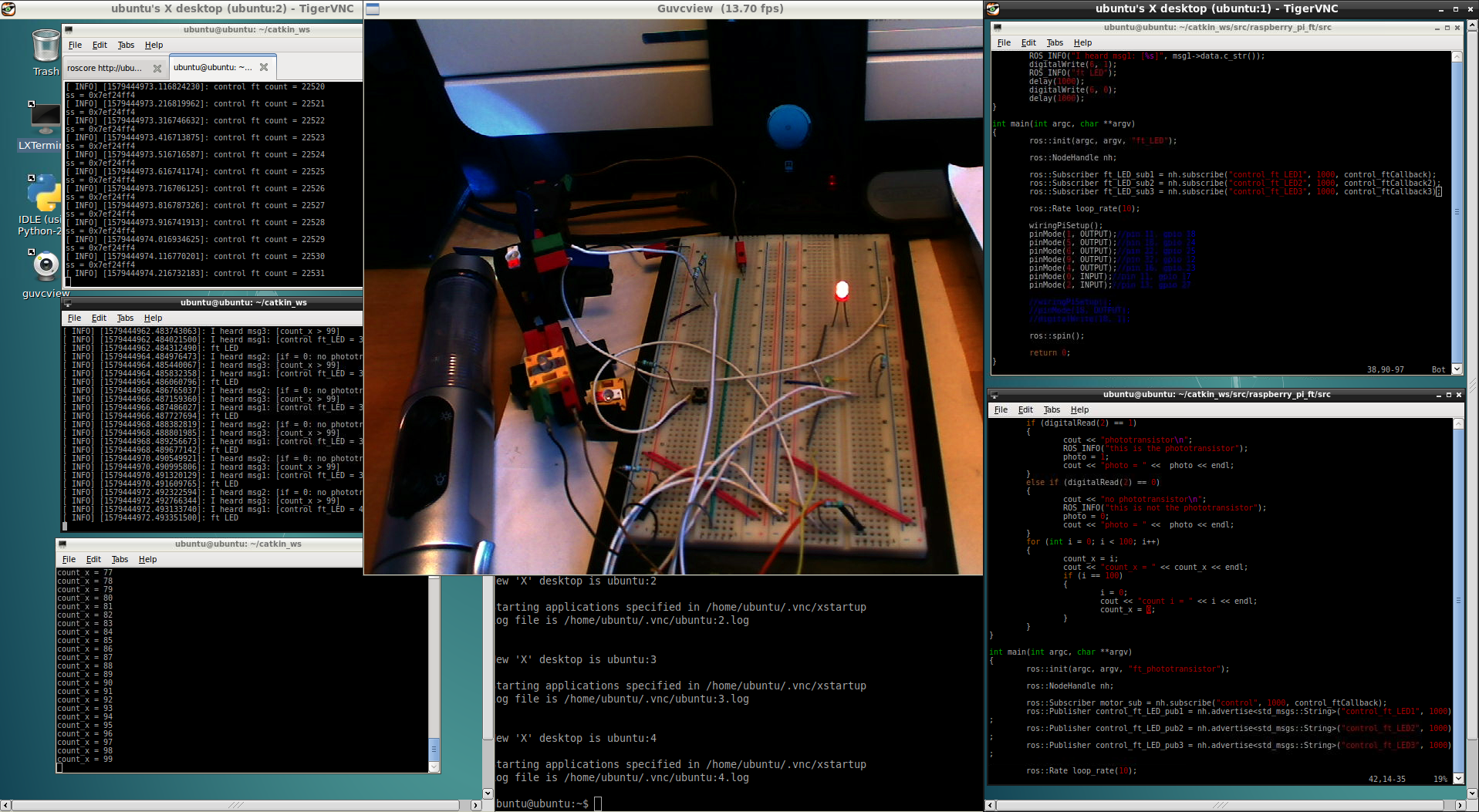
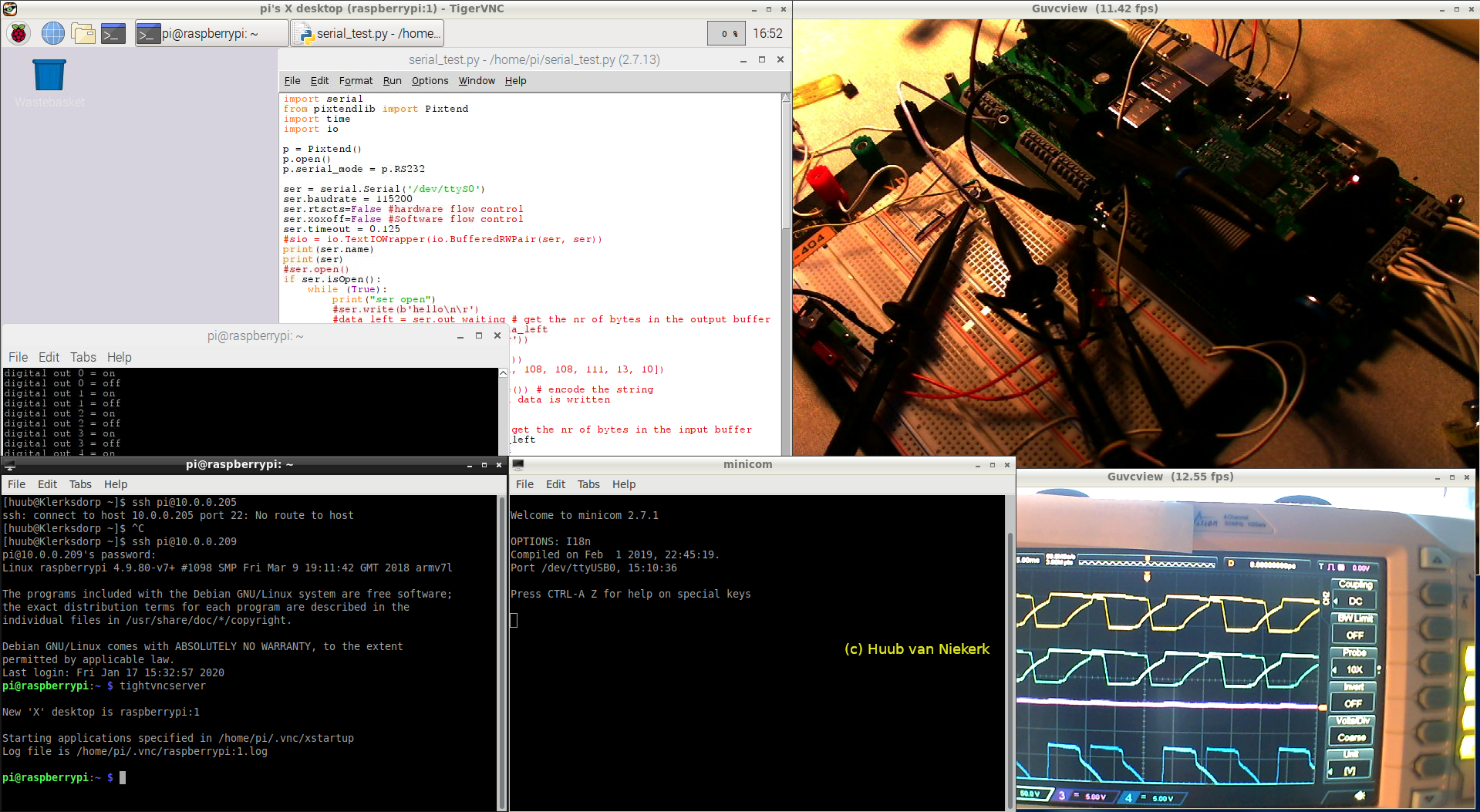
RaspberryPi3 & PiXtend: Focus is again on the digital input and output. Finding that I actually miss something in my C code and finding the solution. Then finding the way how to engage the digital output. Click the image to watch the video.
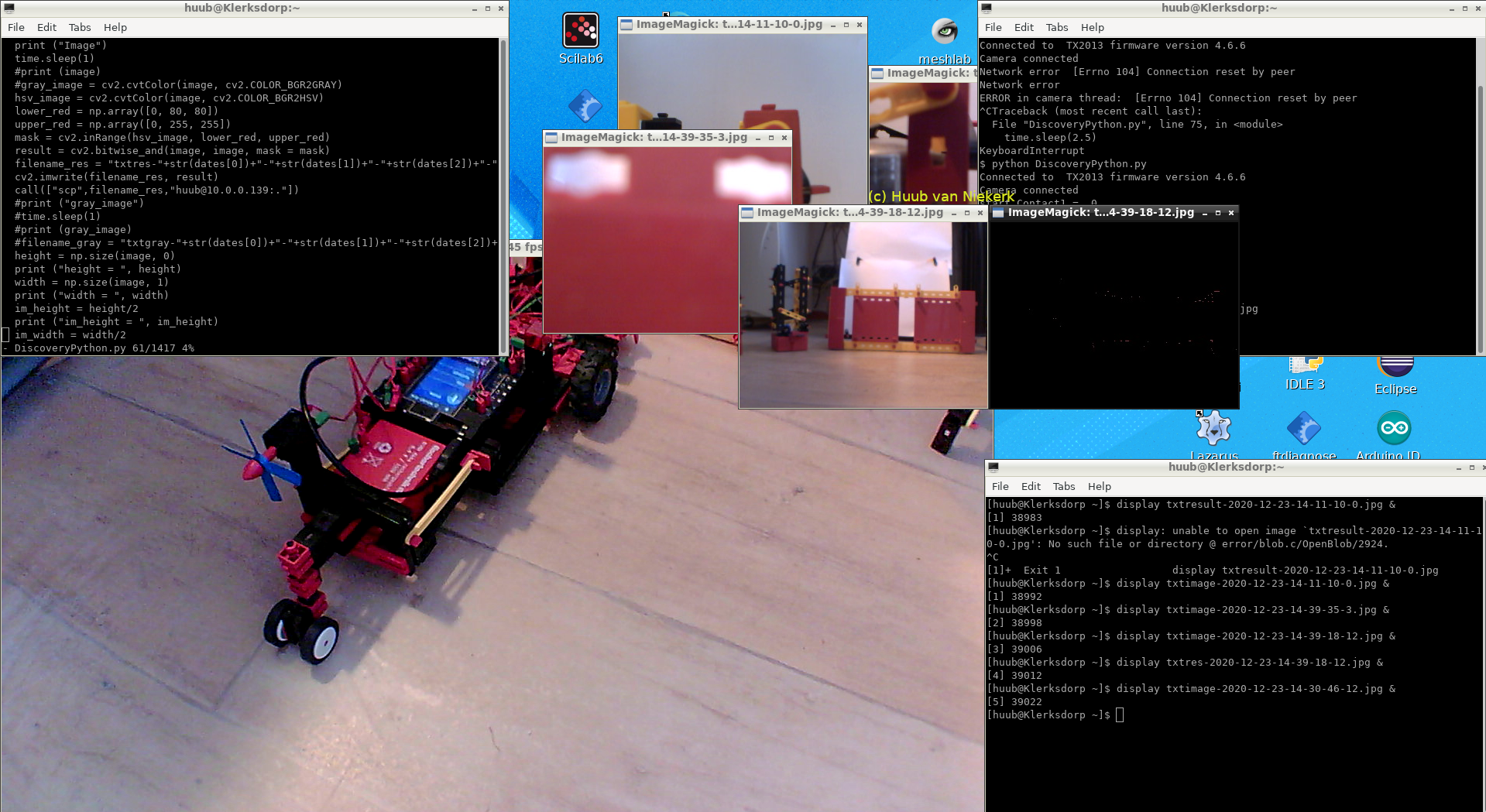
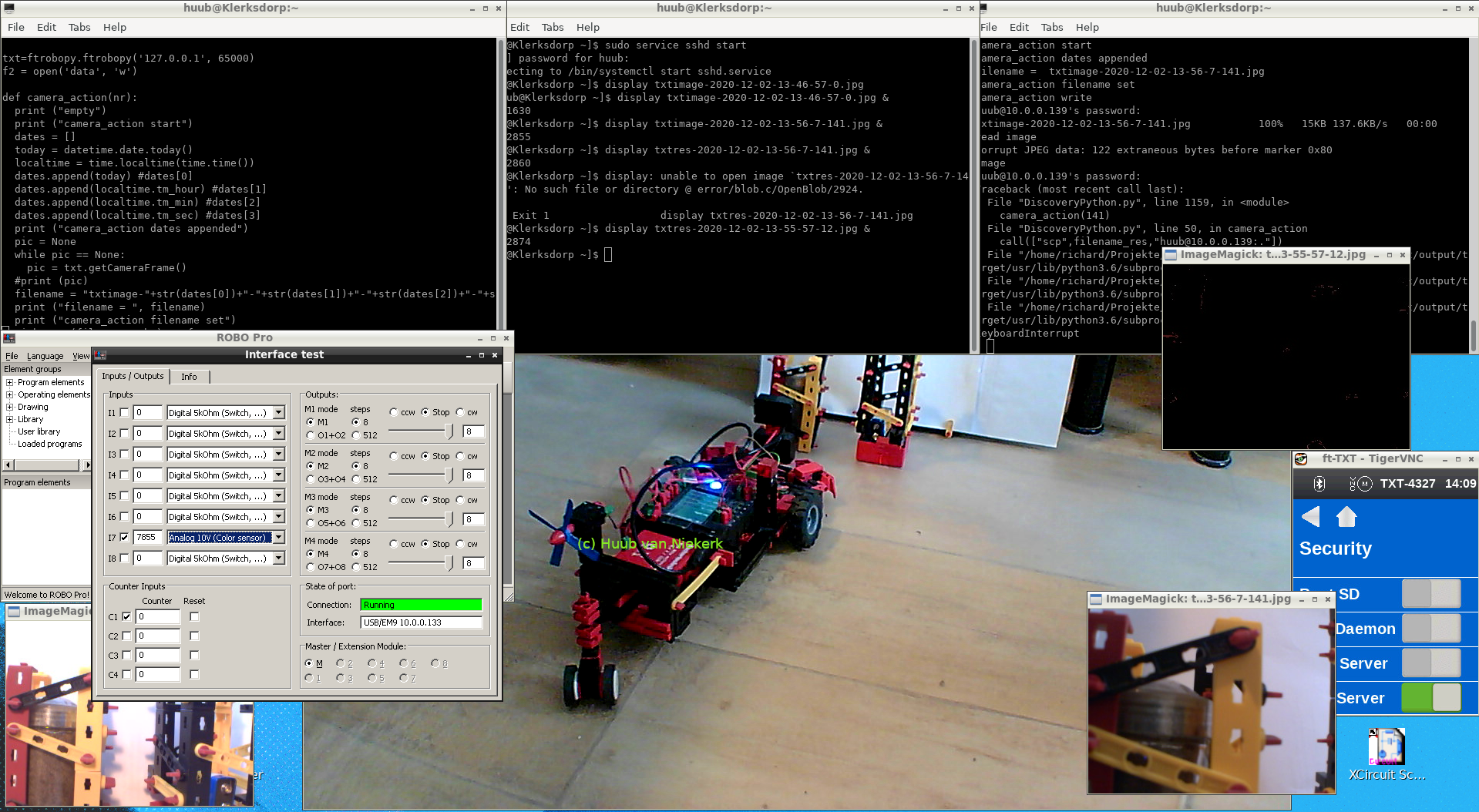
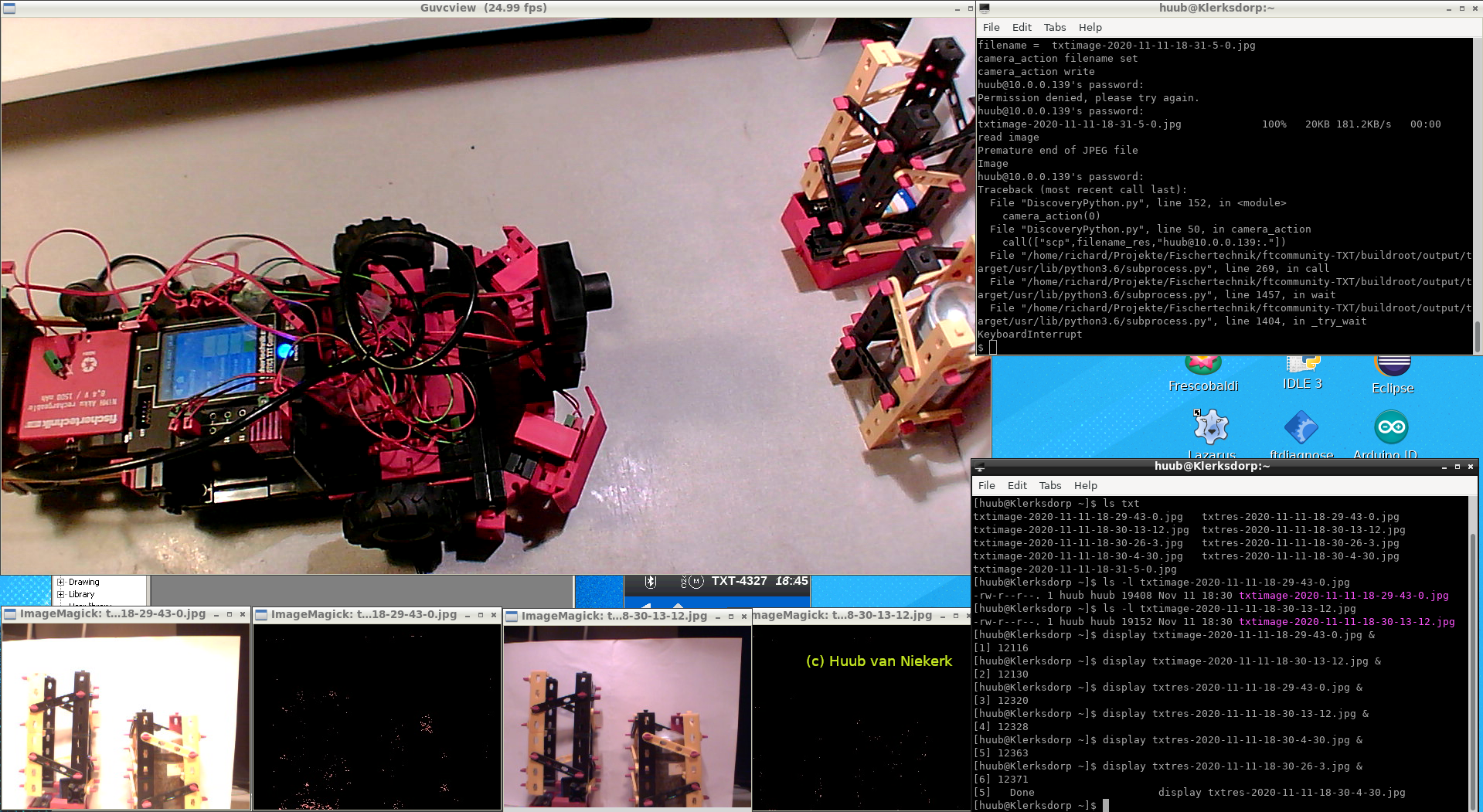
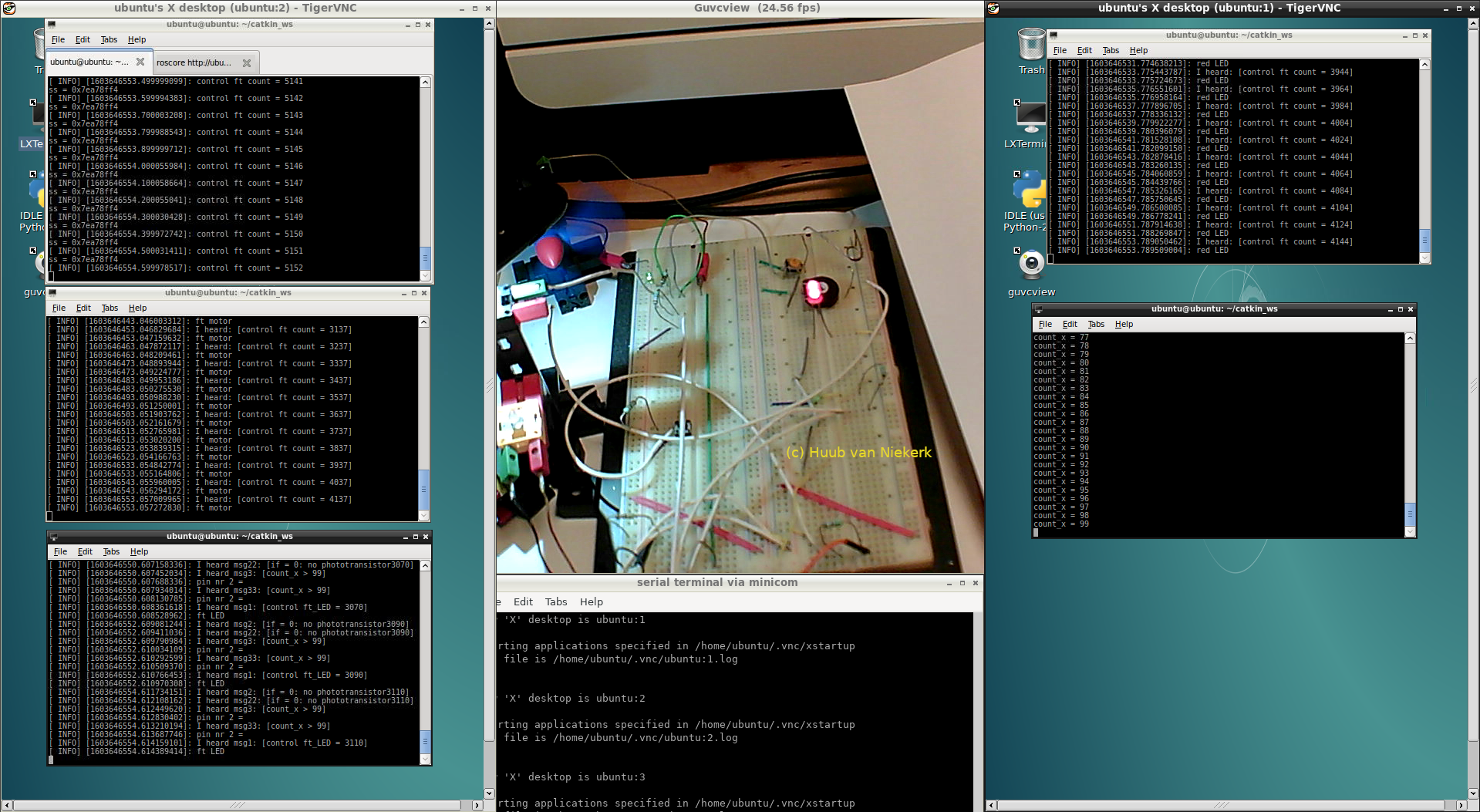
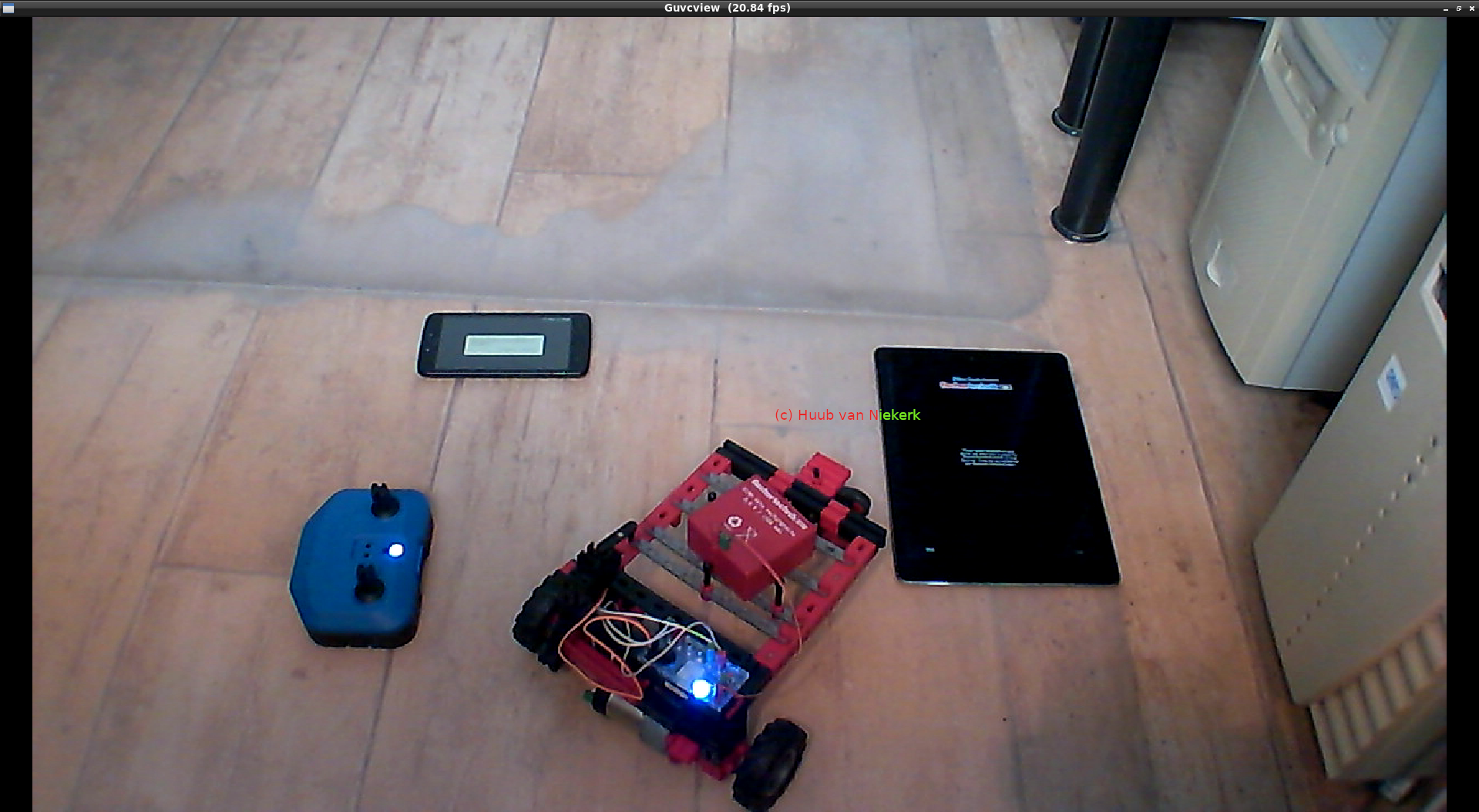
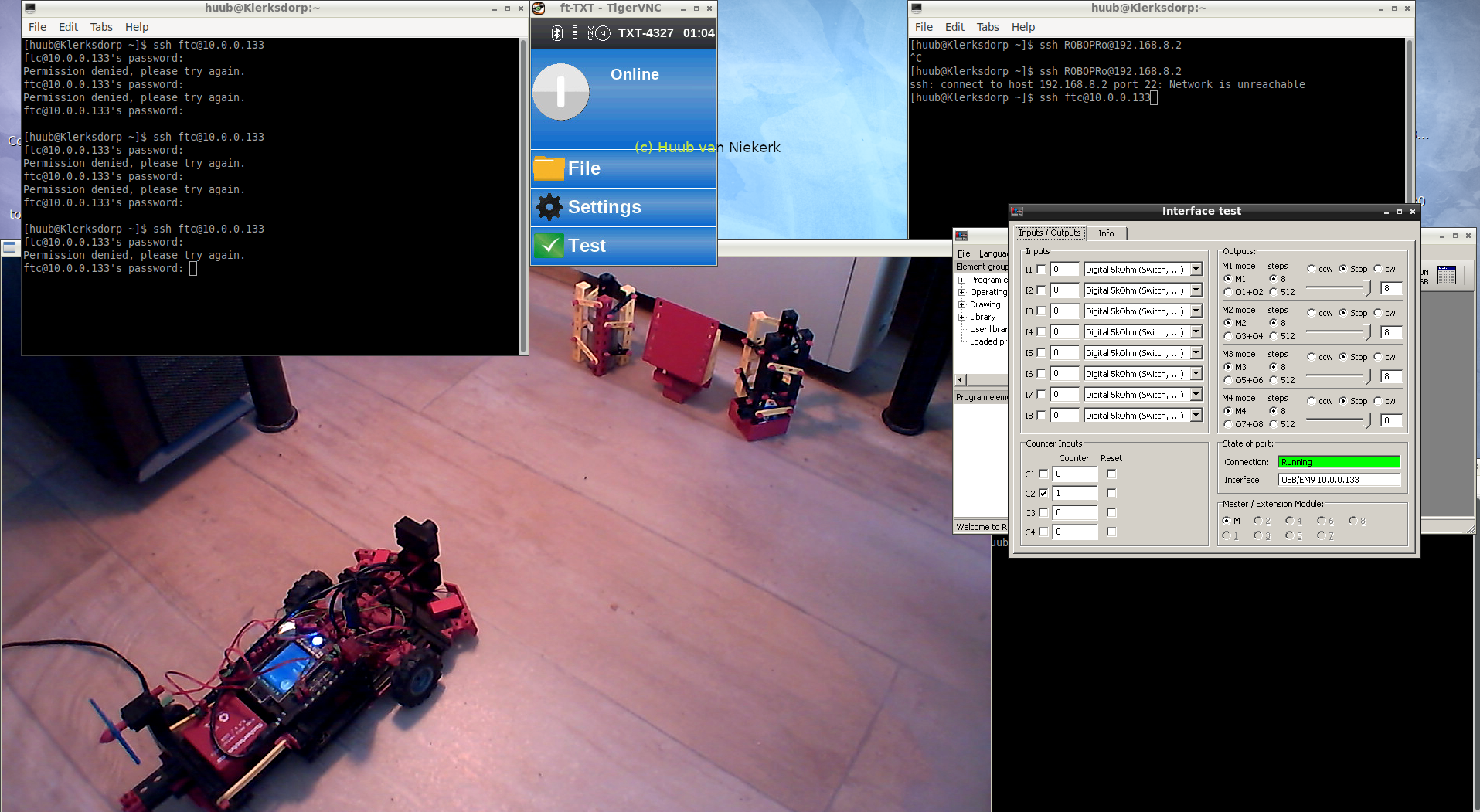
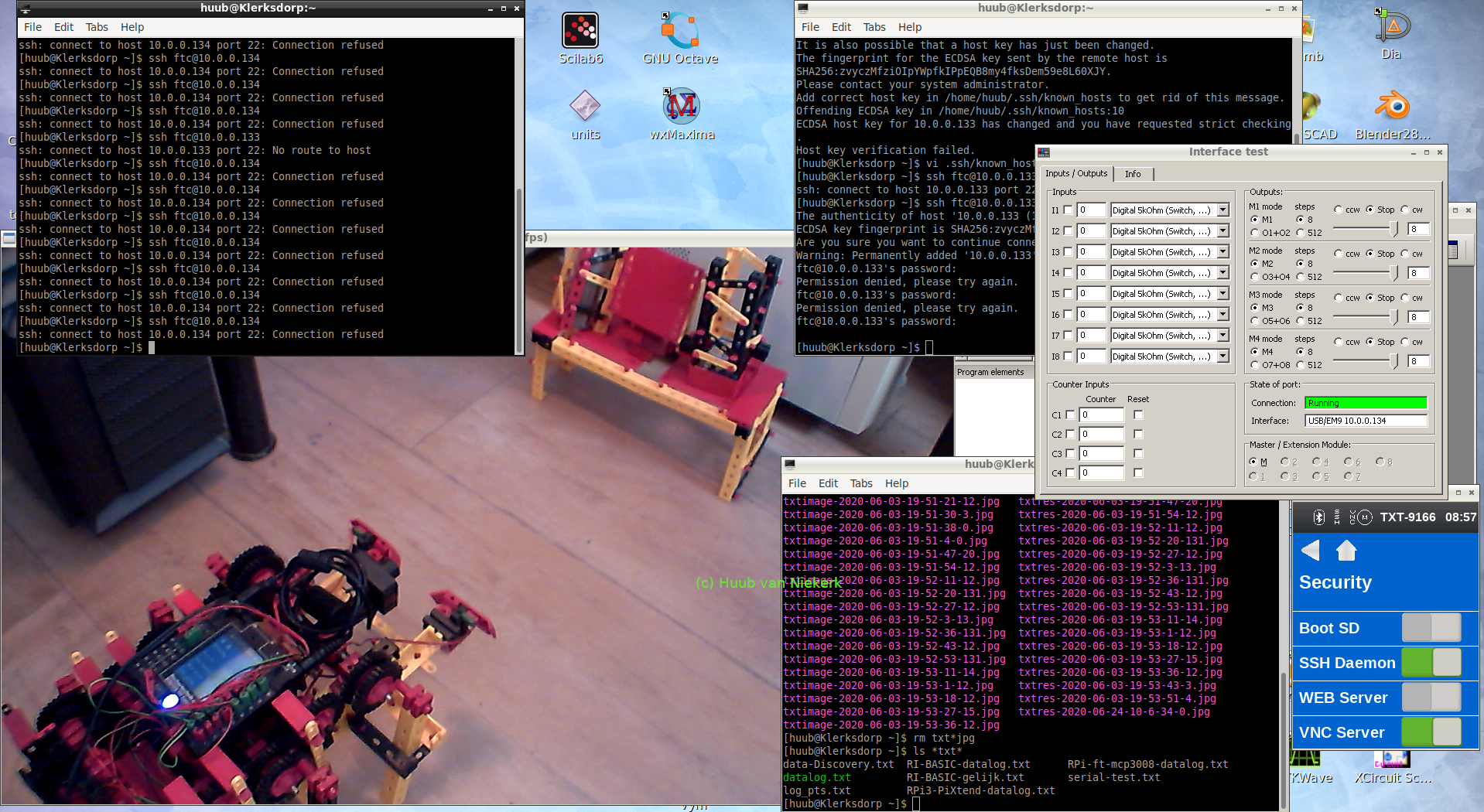
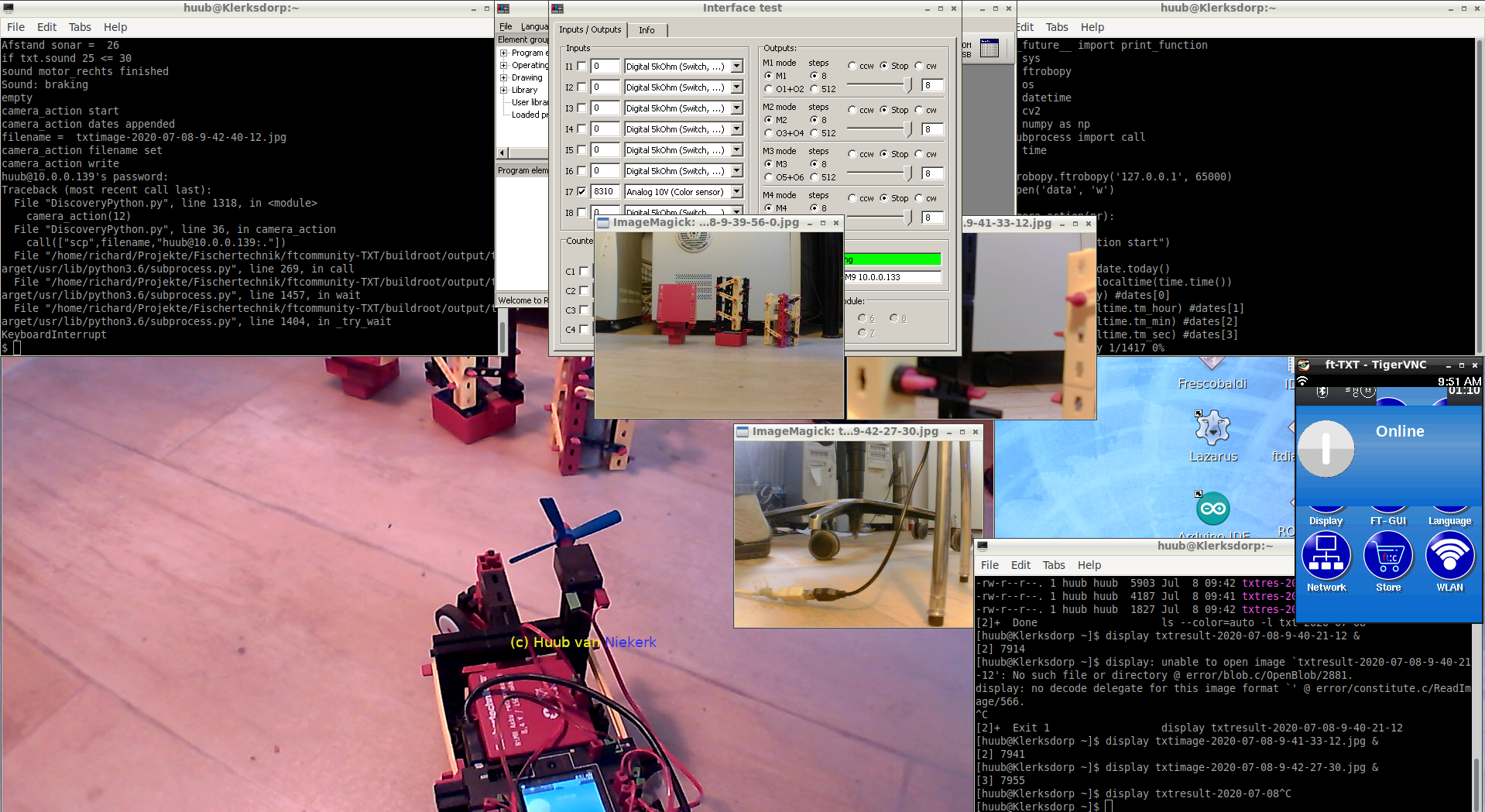
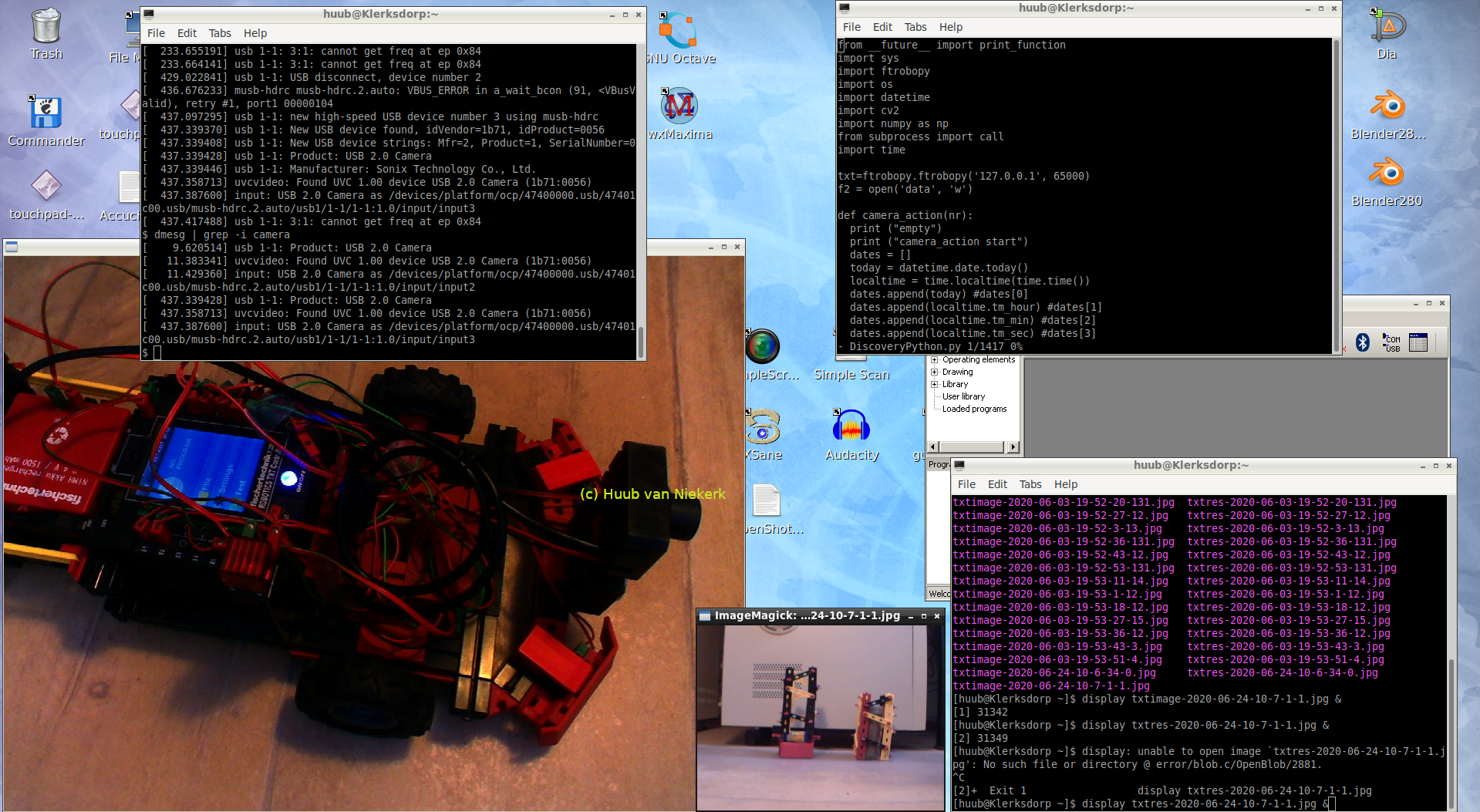
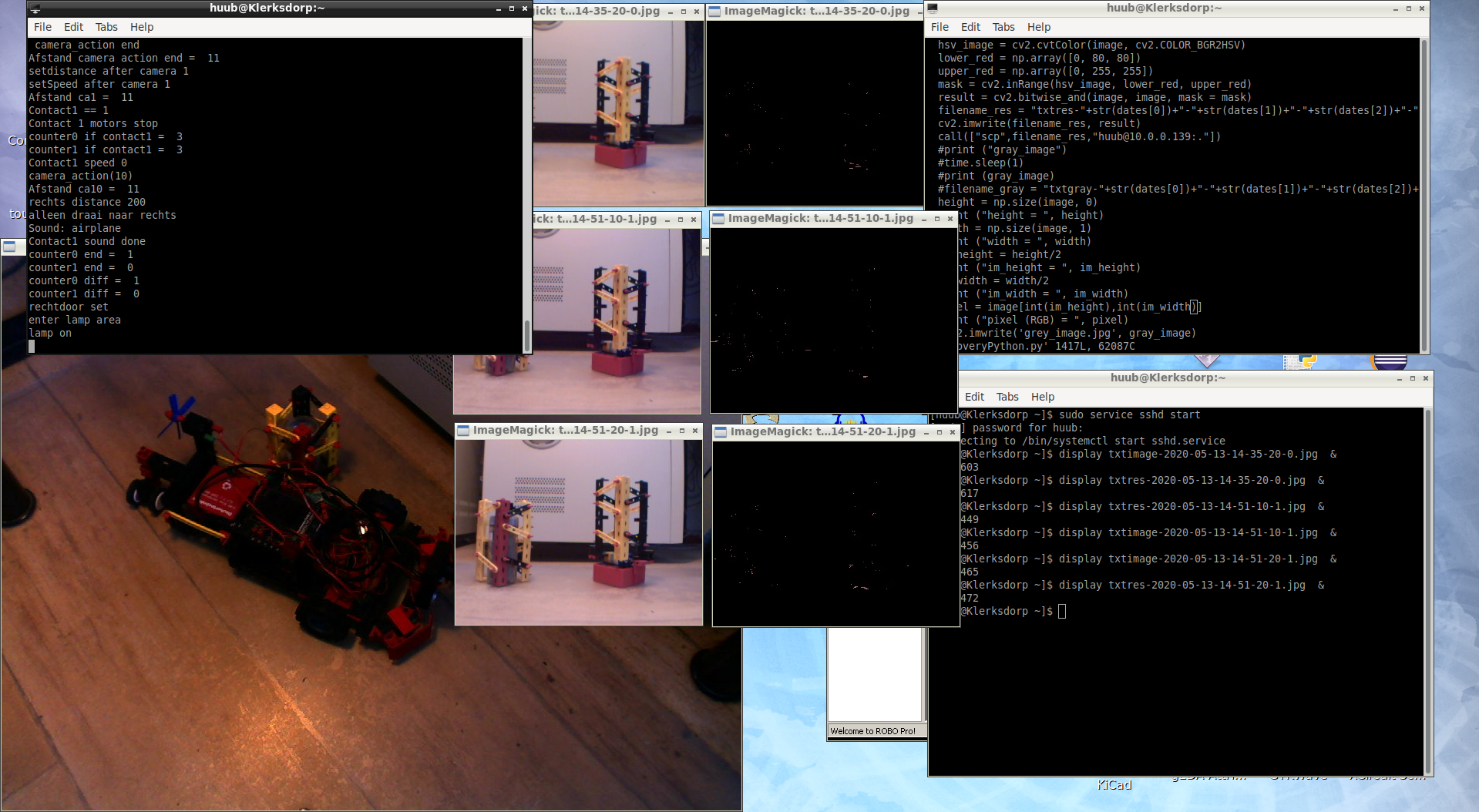
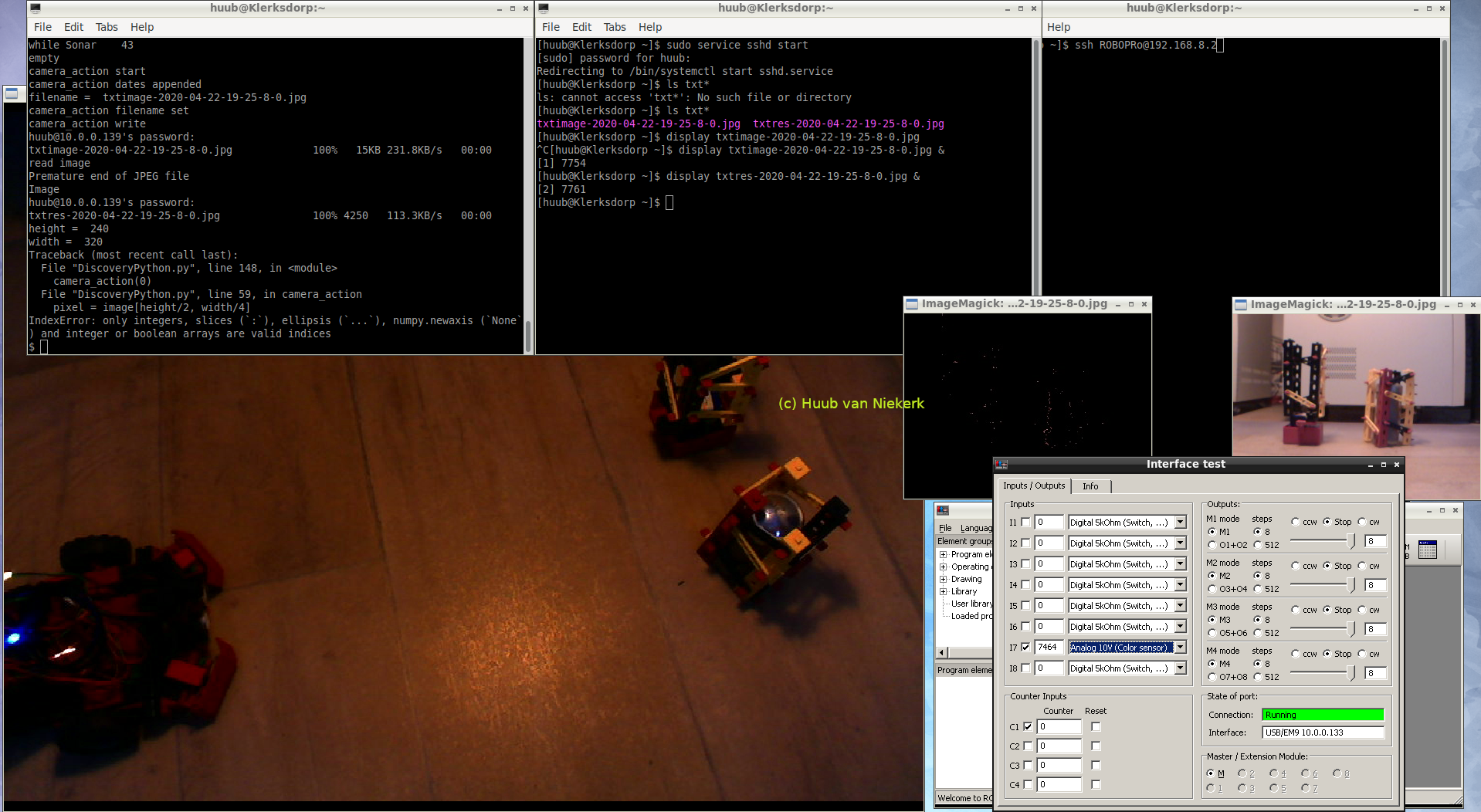
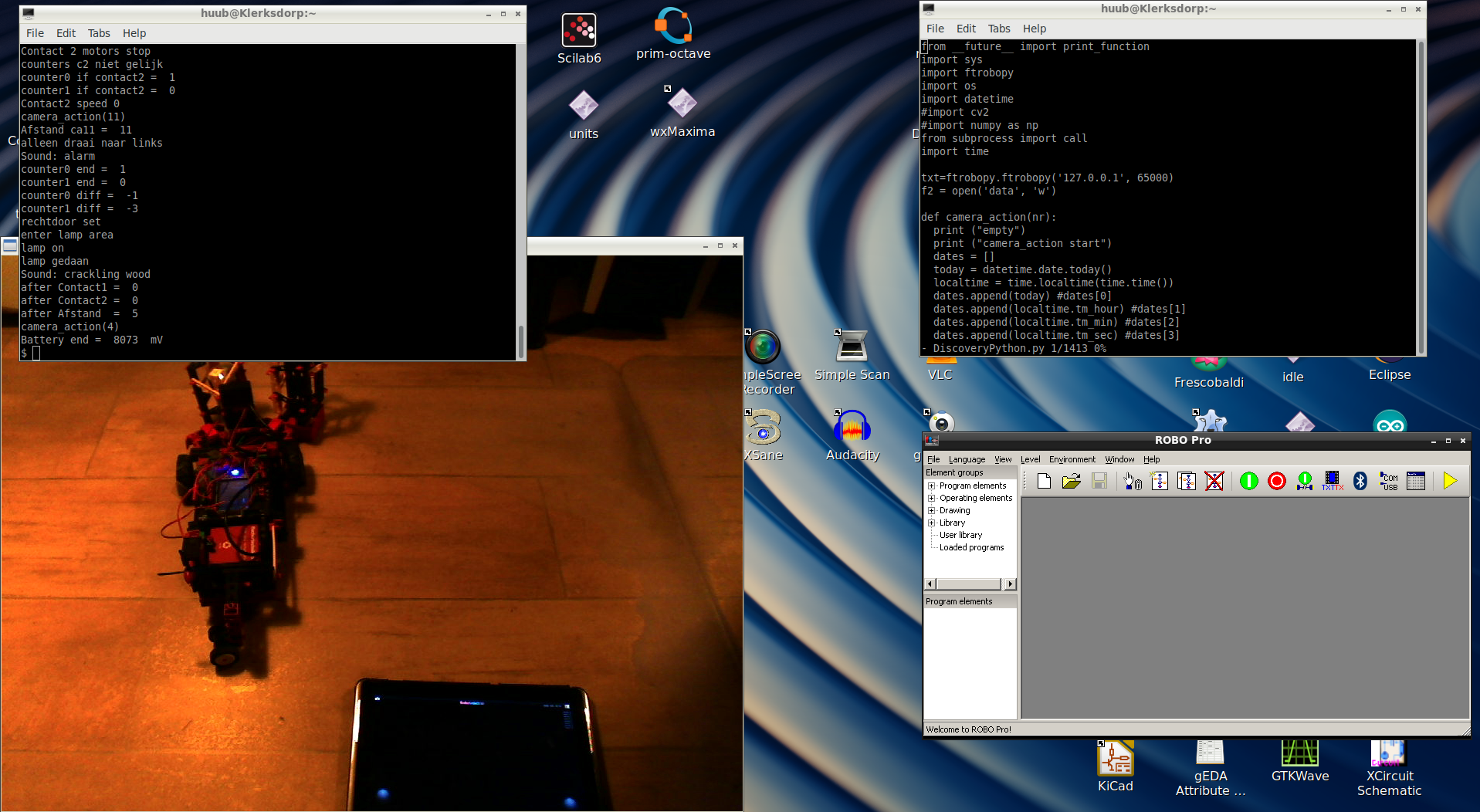
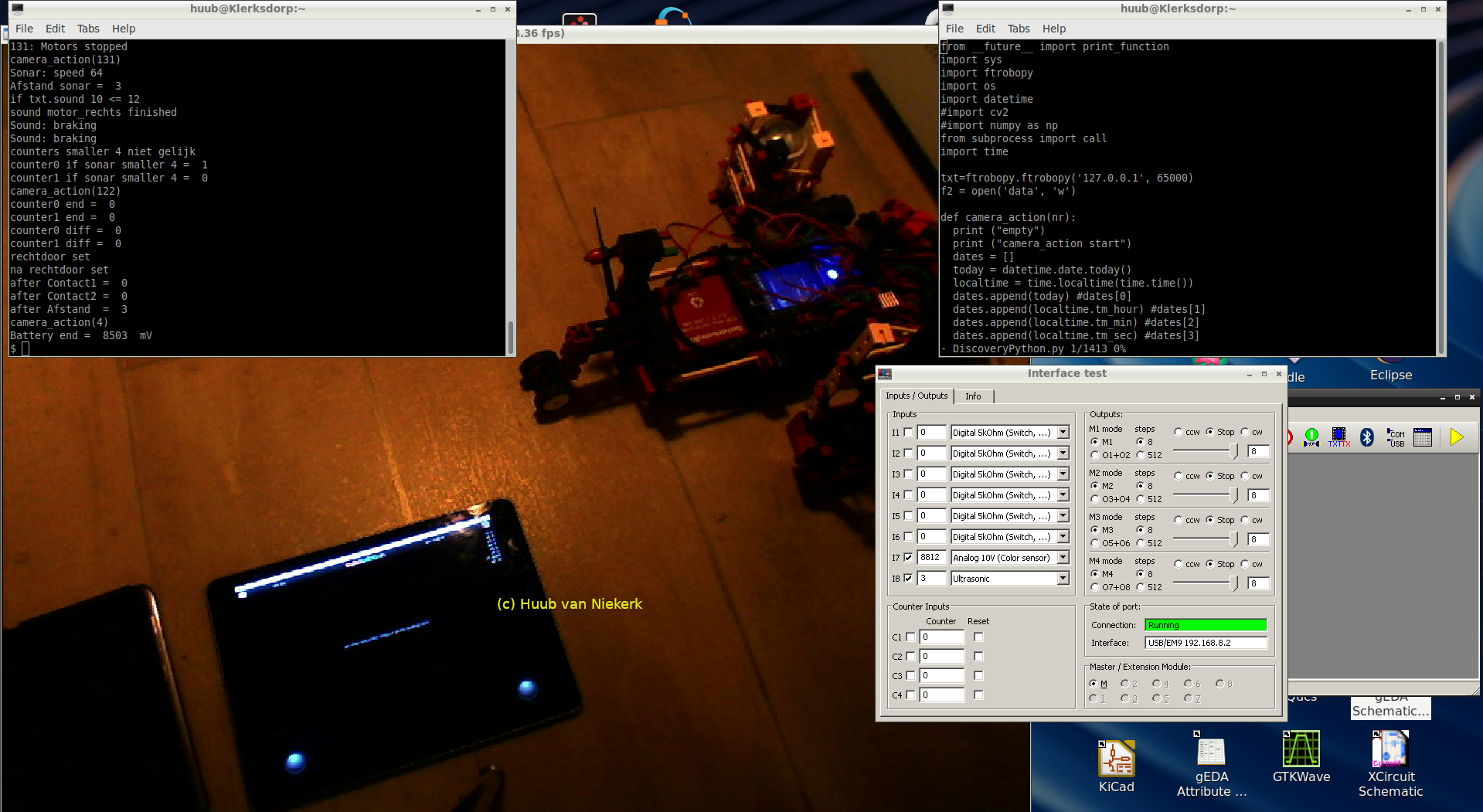
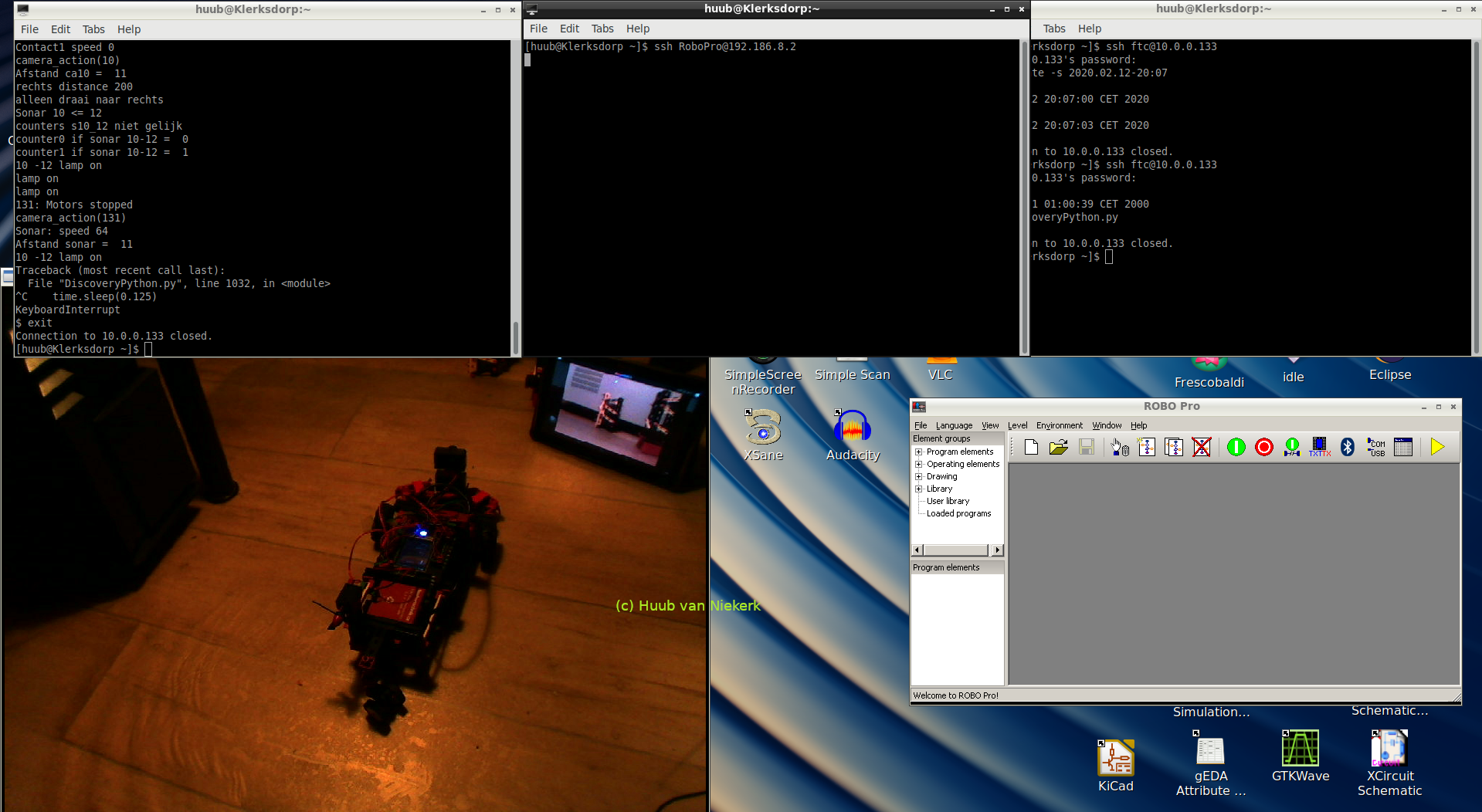
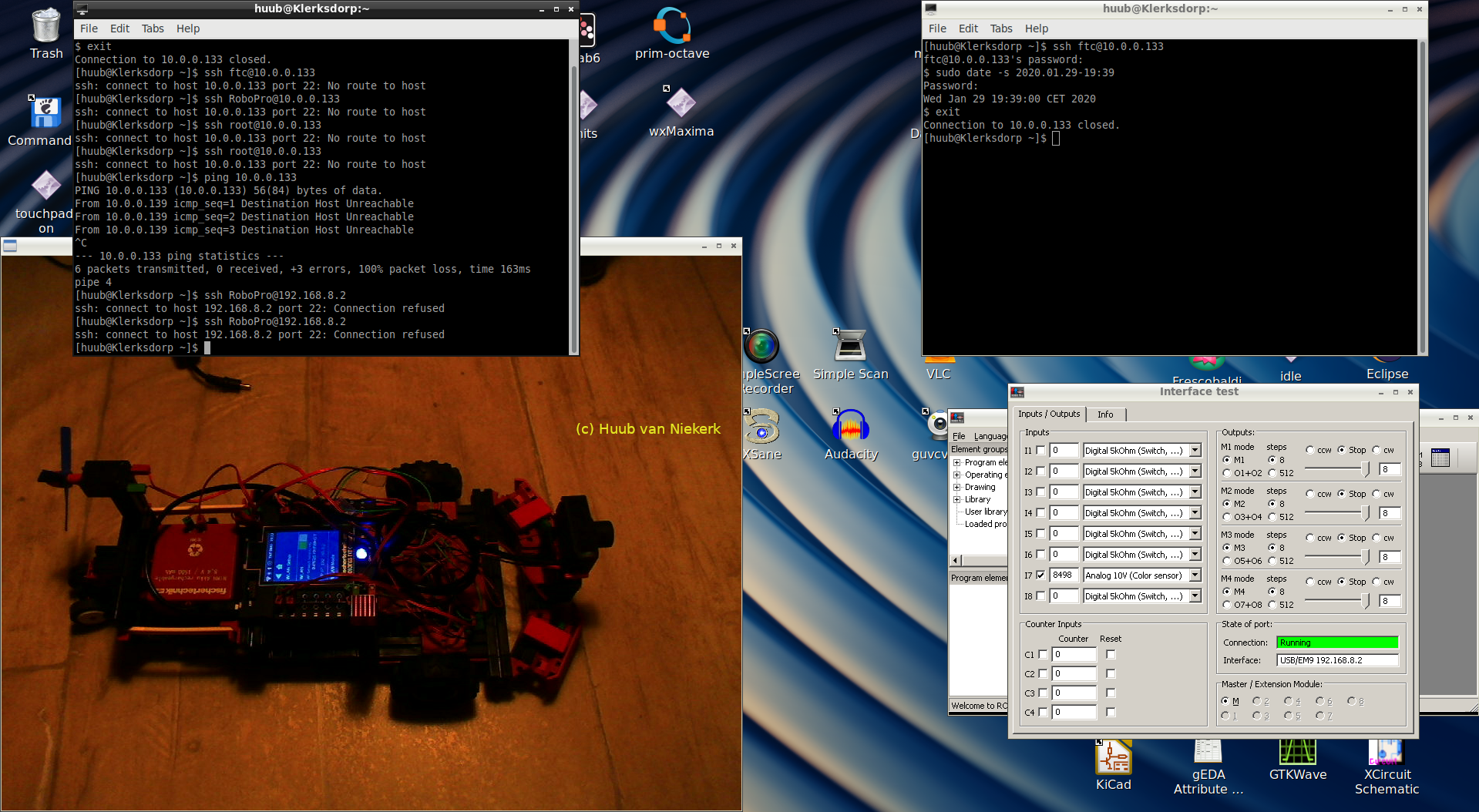
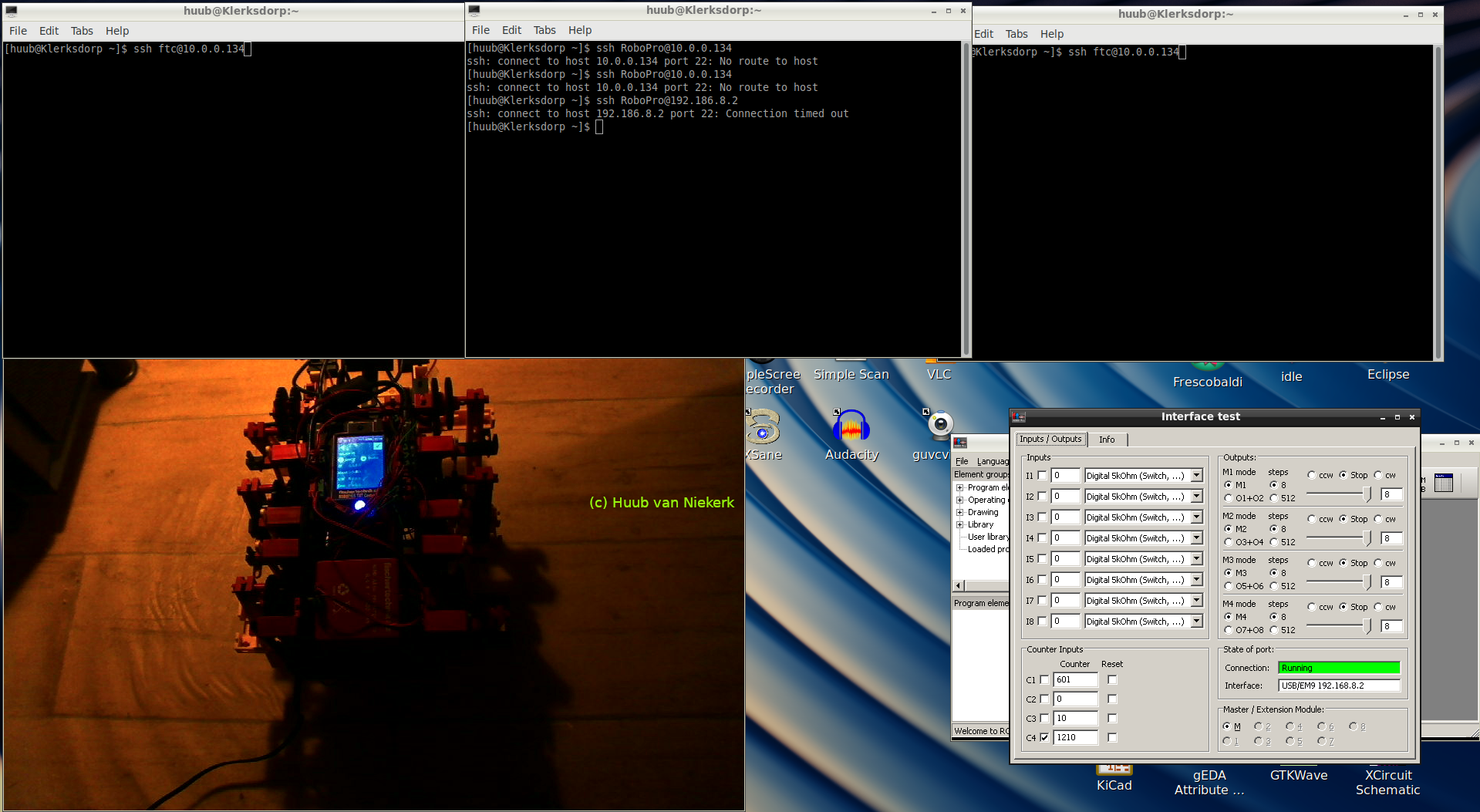
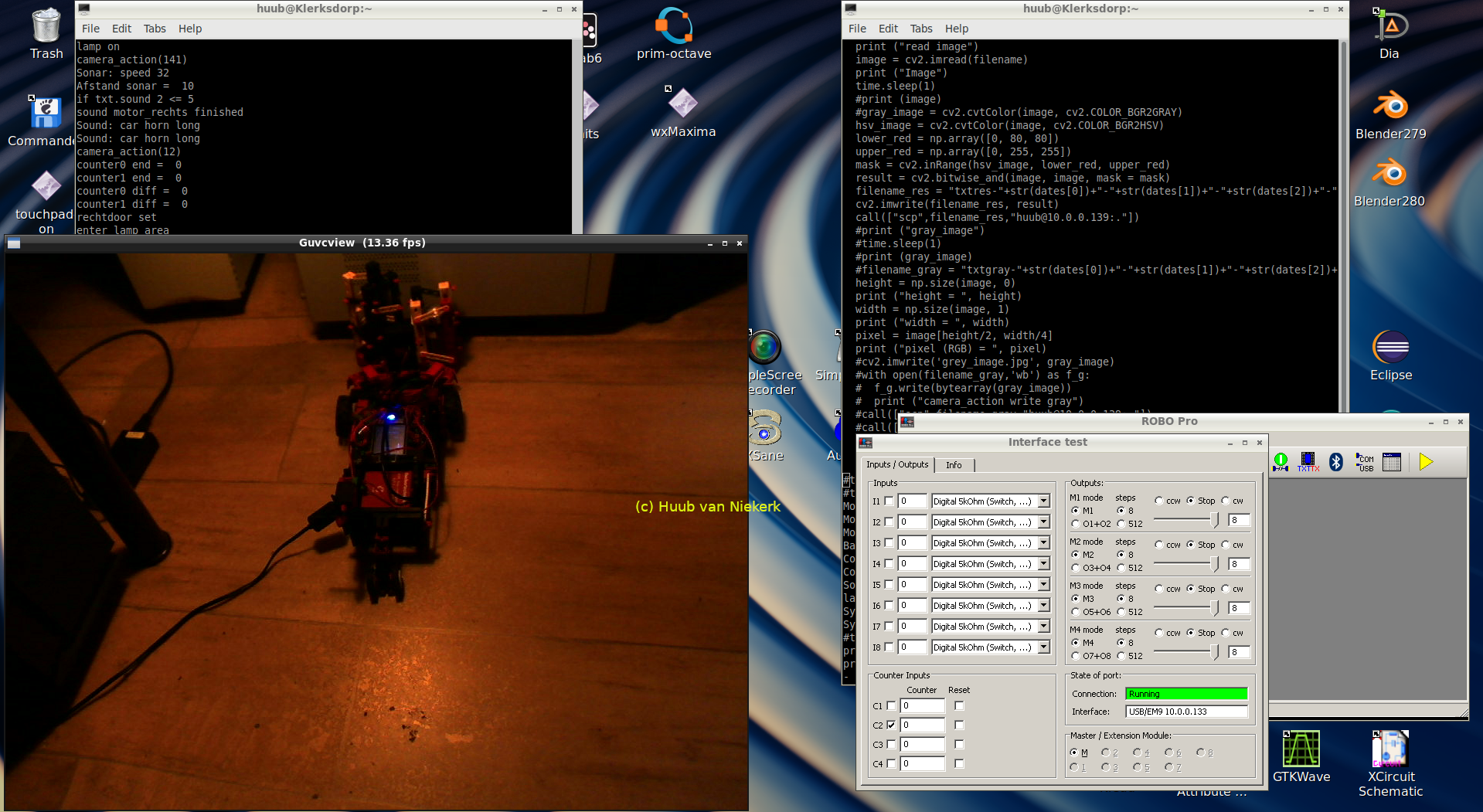
Discovery: After a short check, I continue floor tests and it shows something somehow still isn't right. But why? Click the image to watch the video.
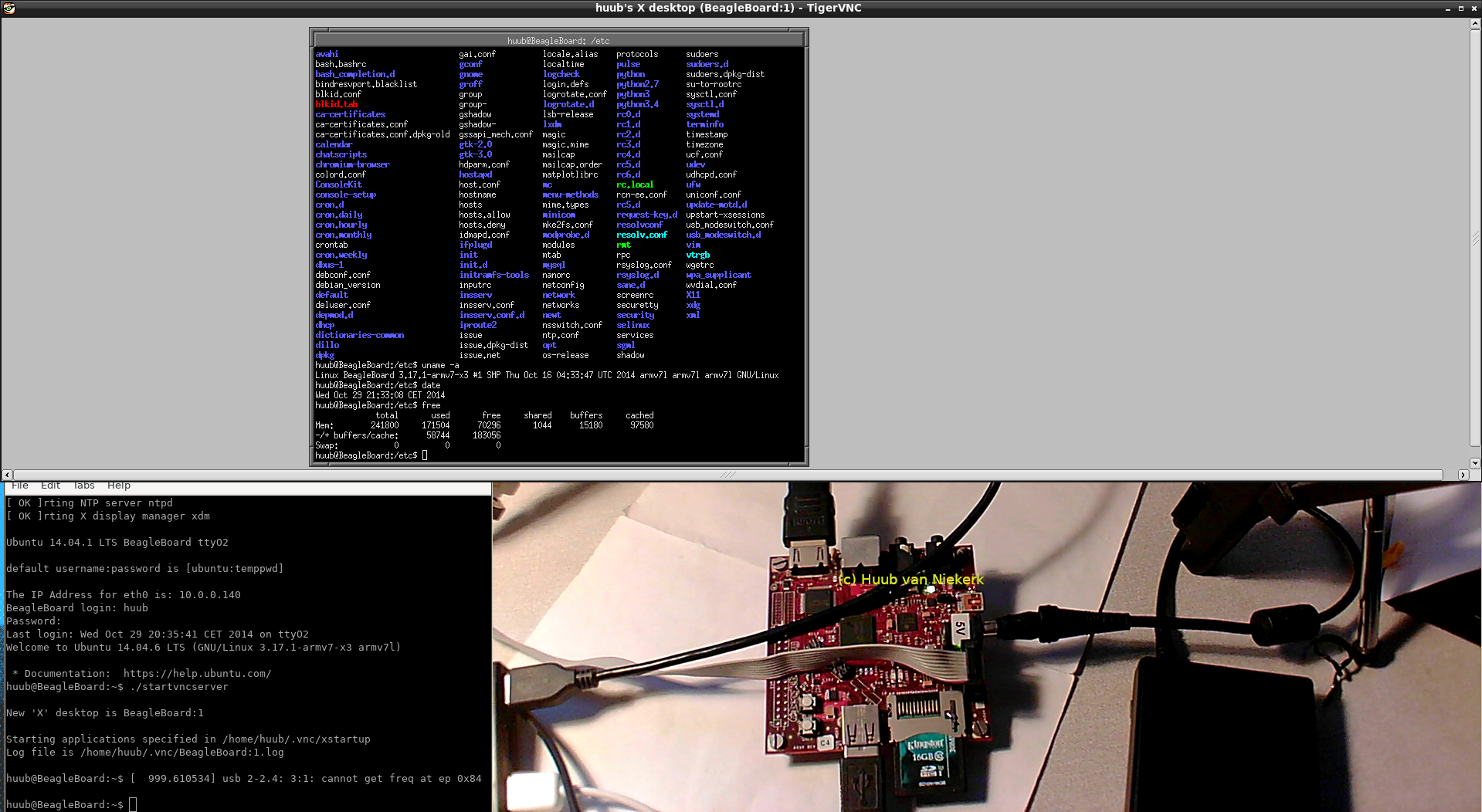
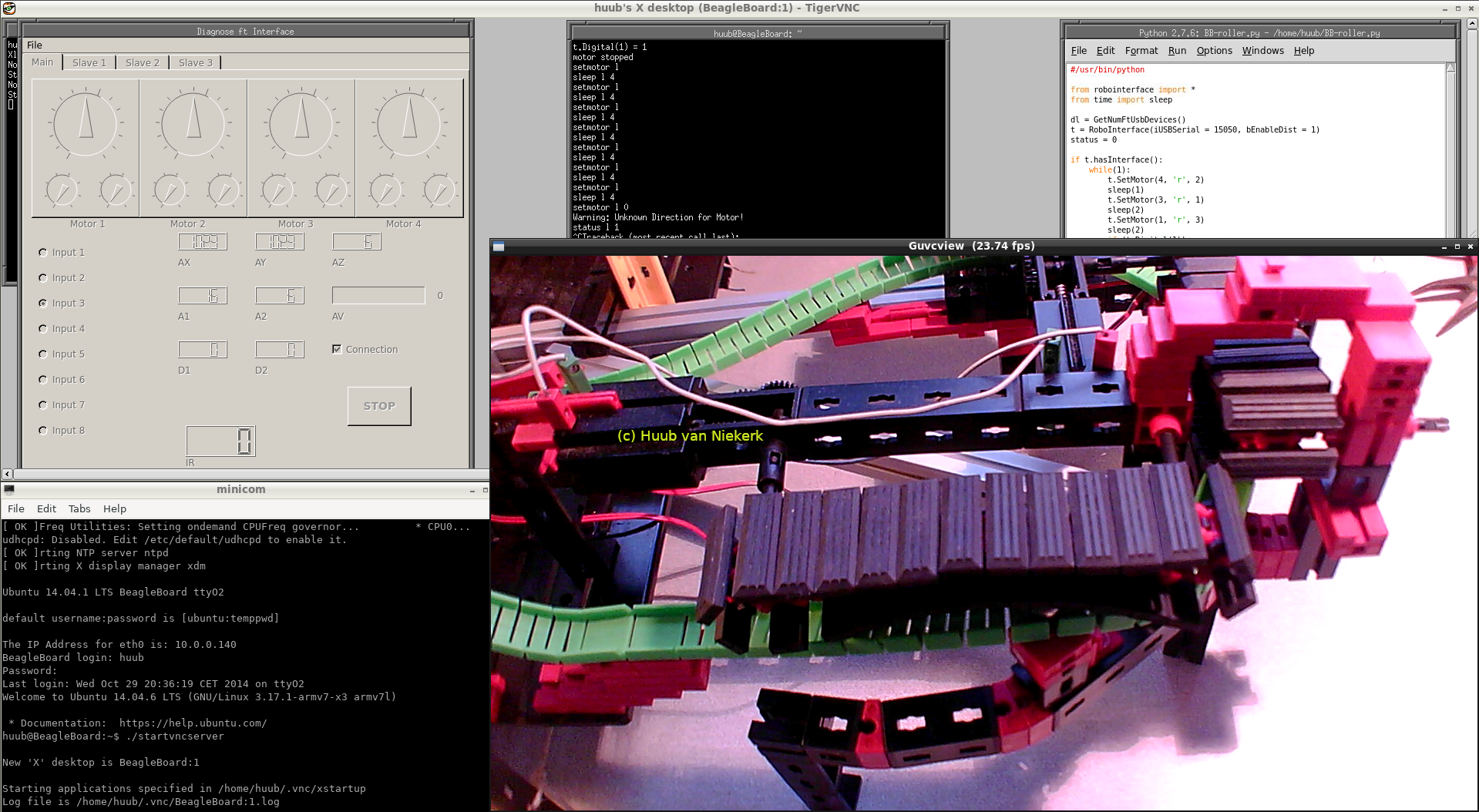
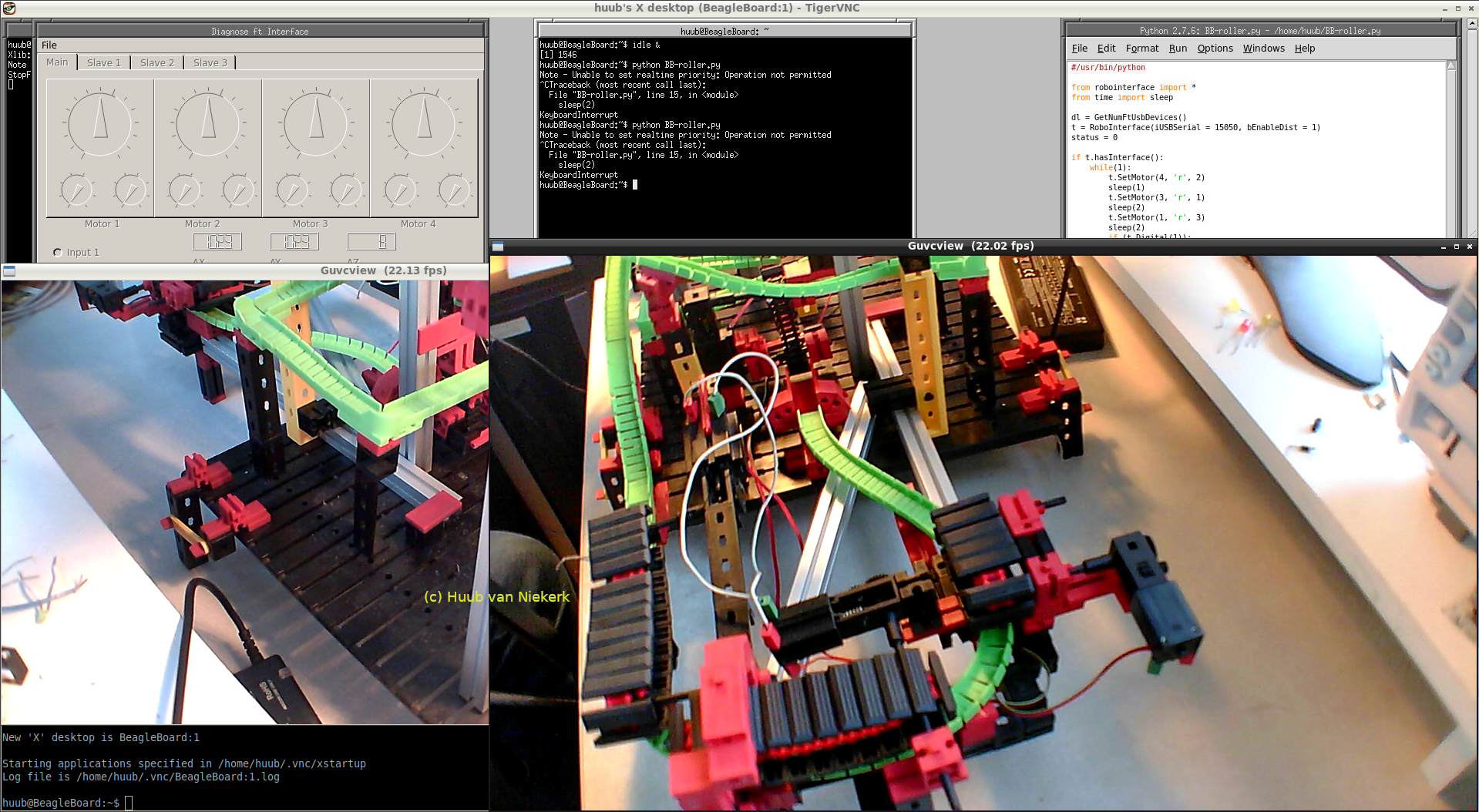
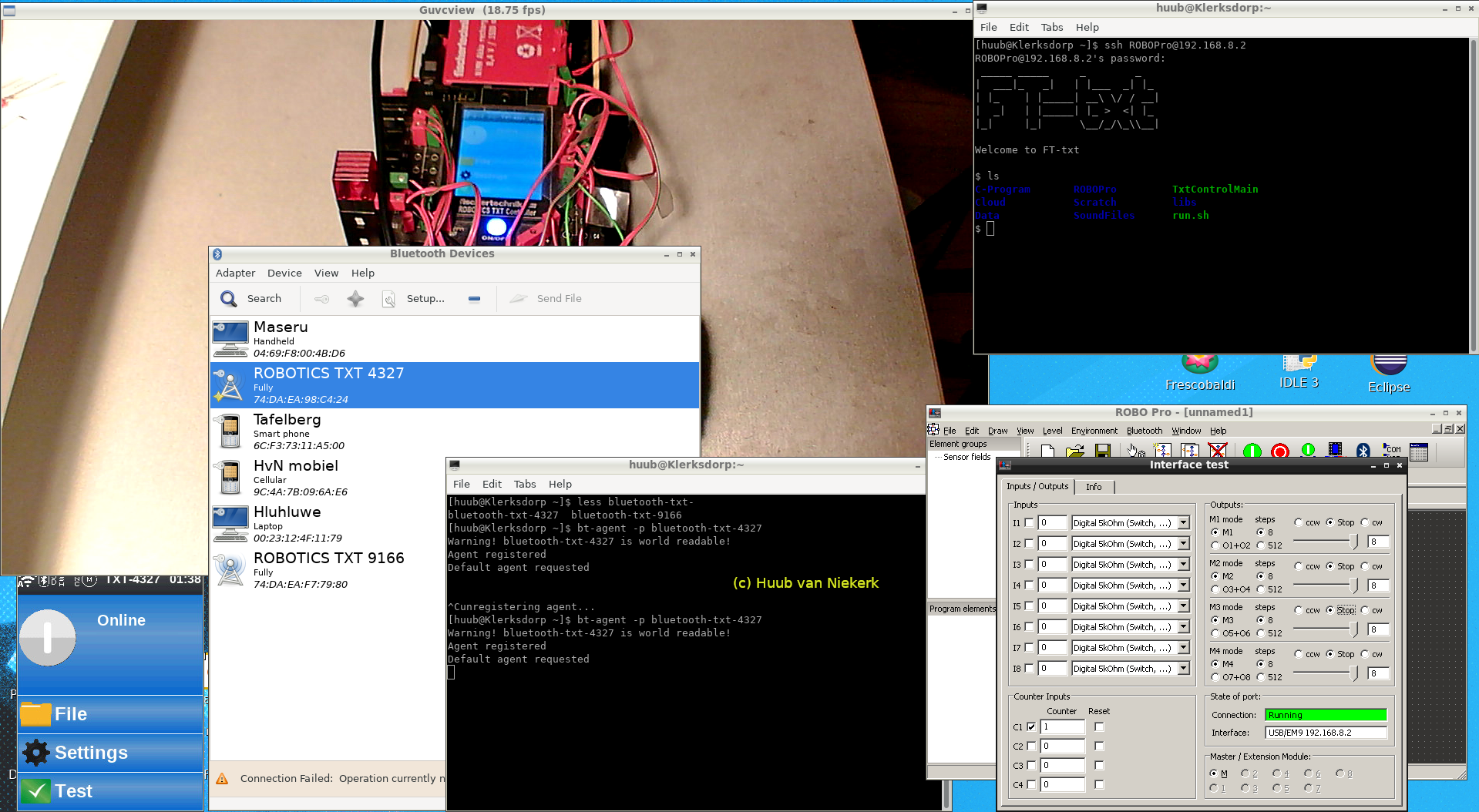
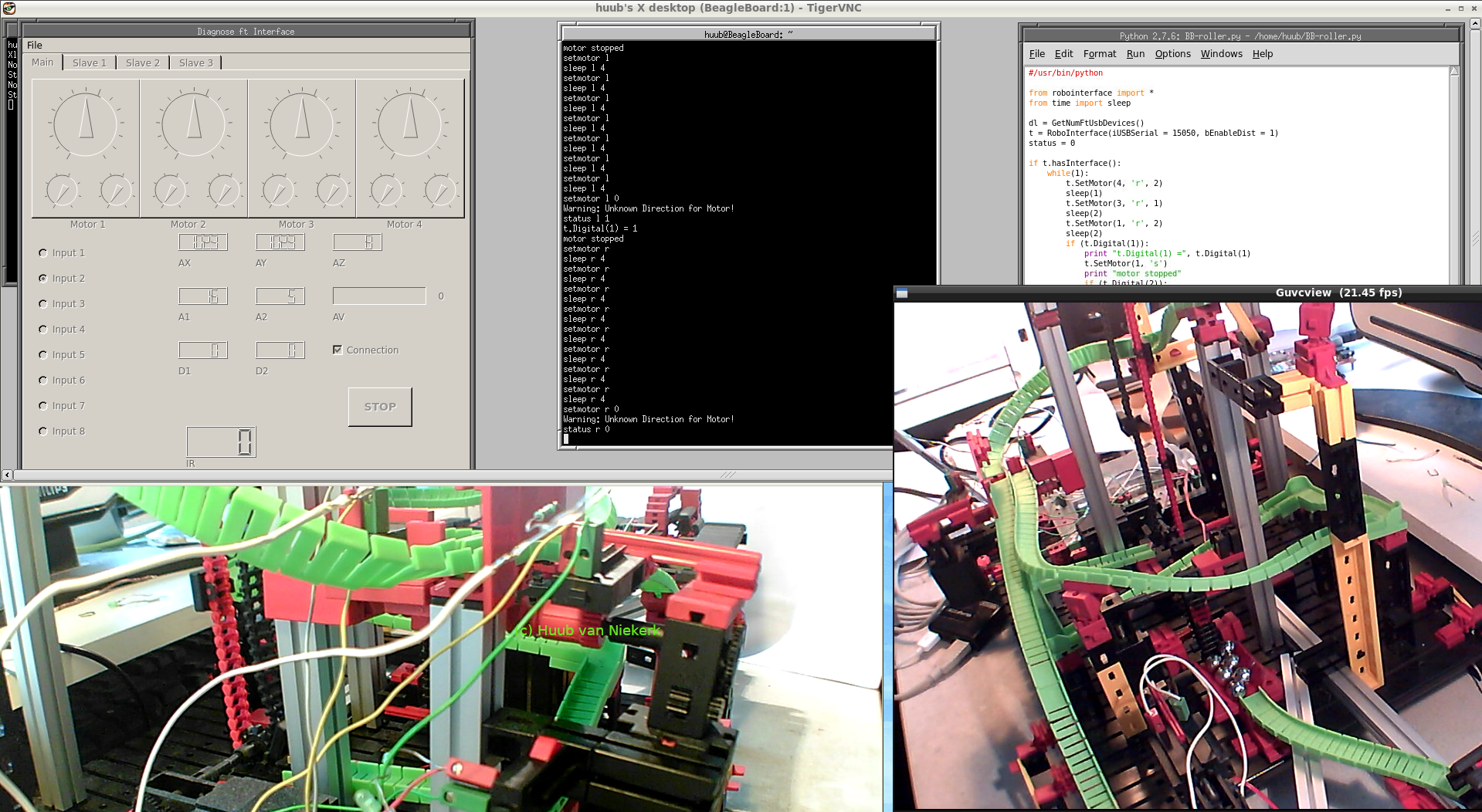
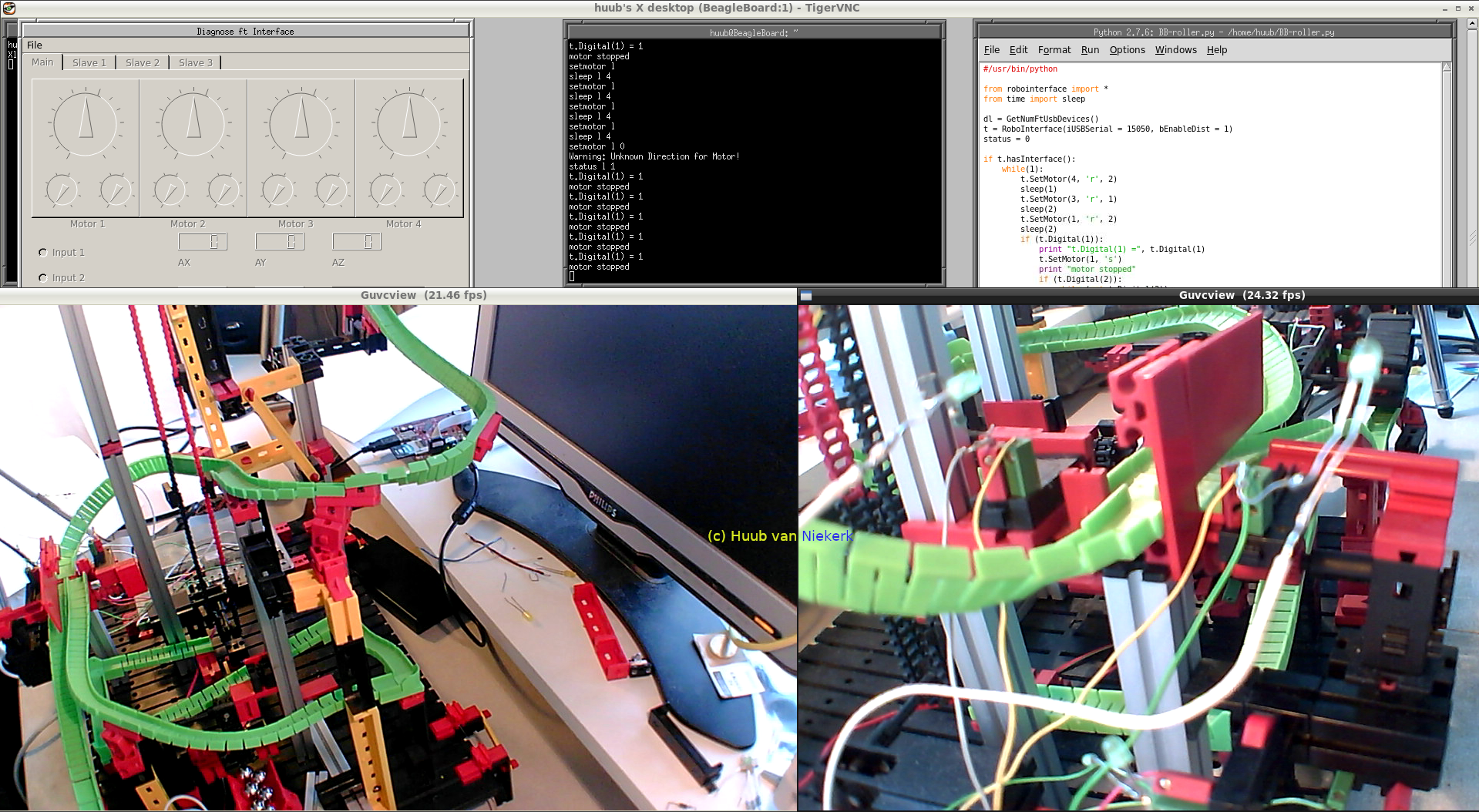
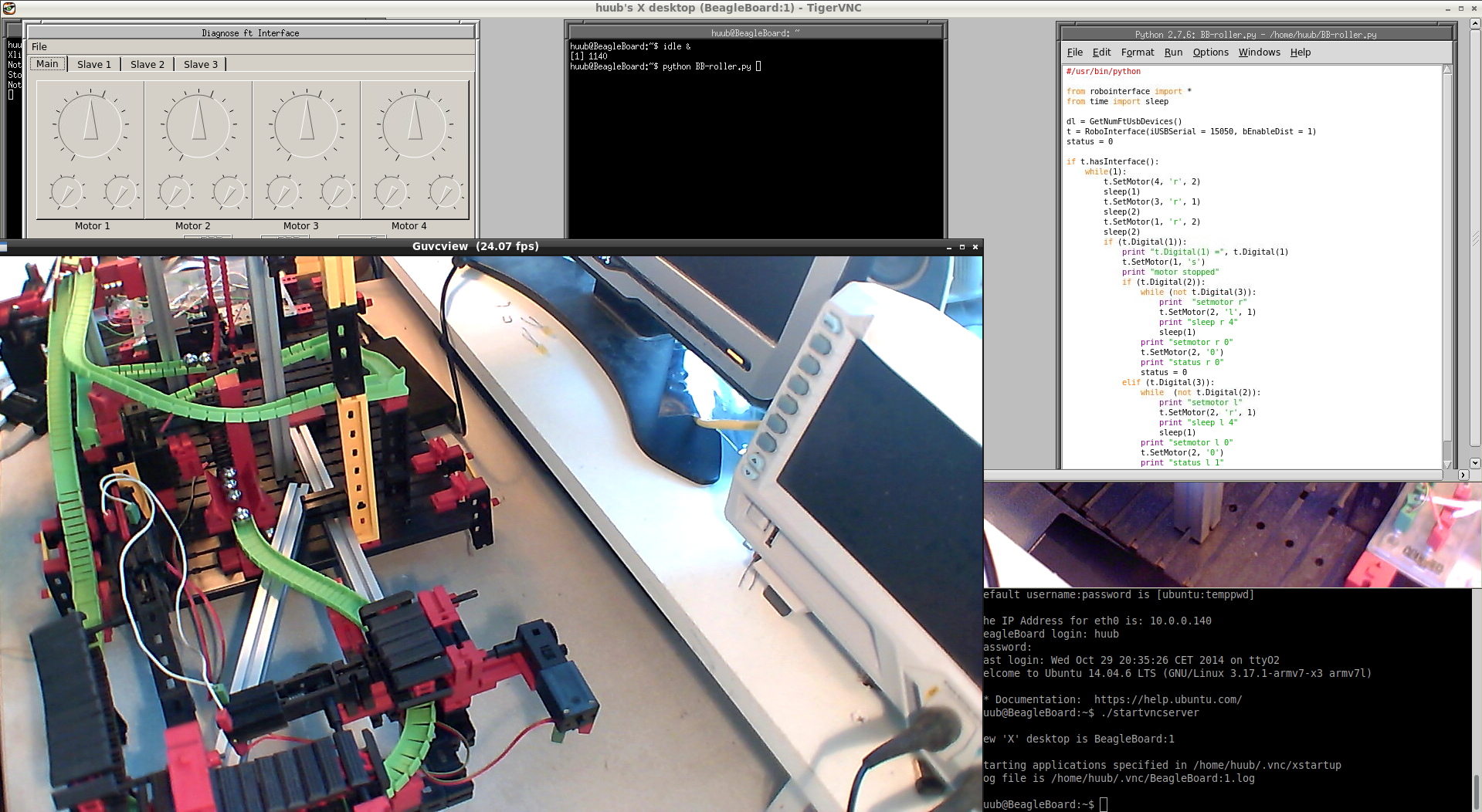
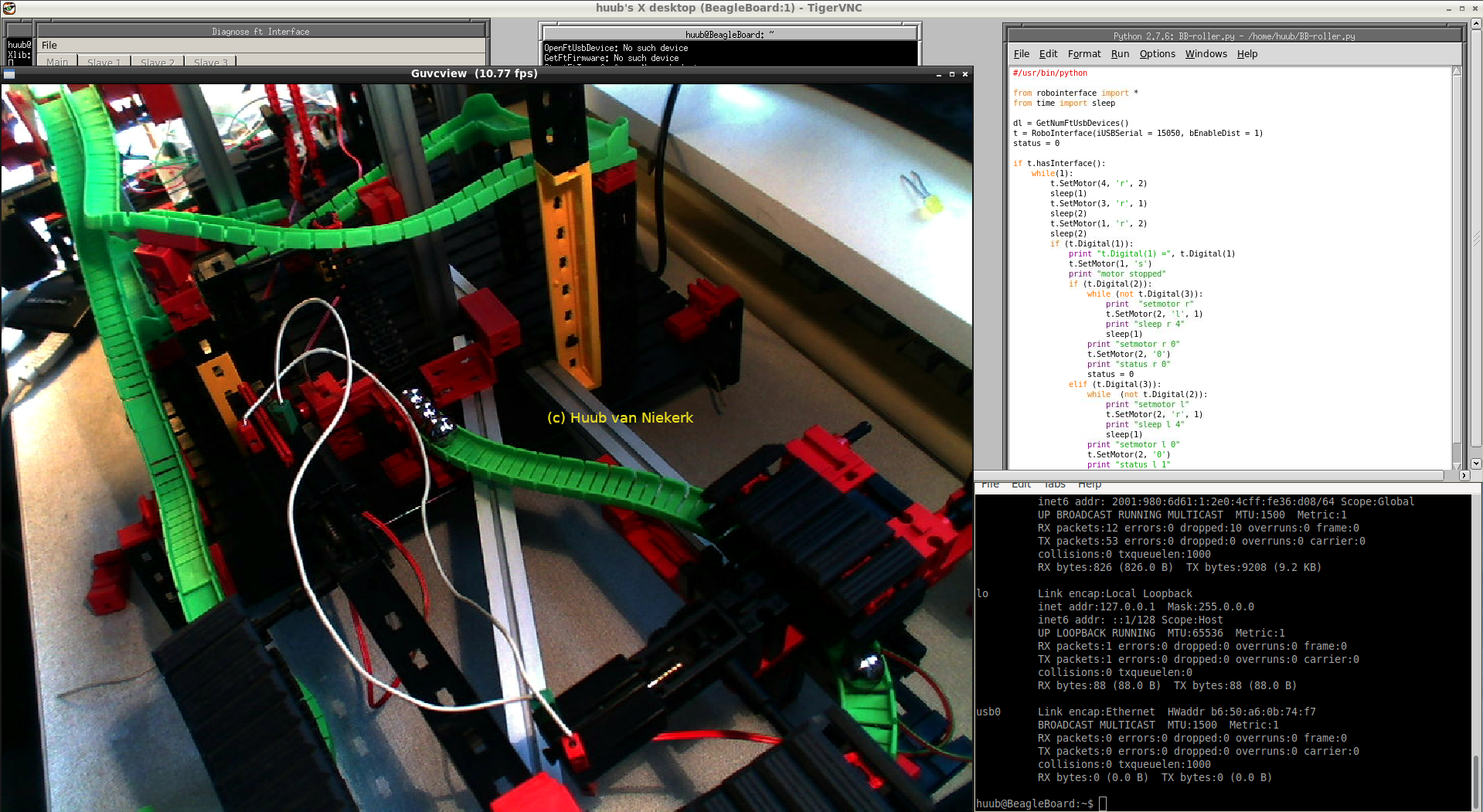
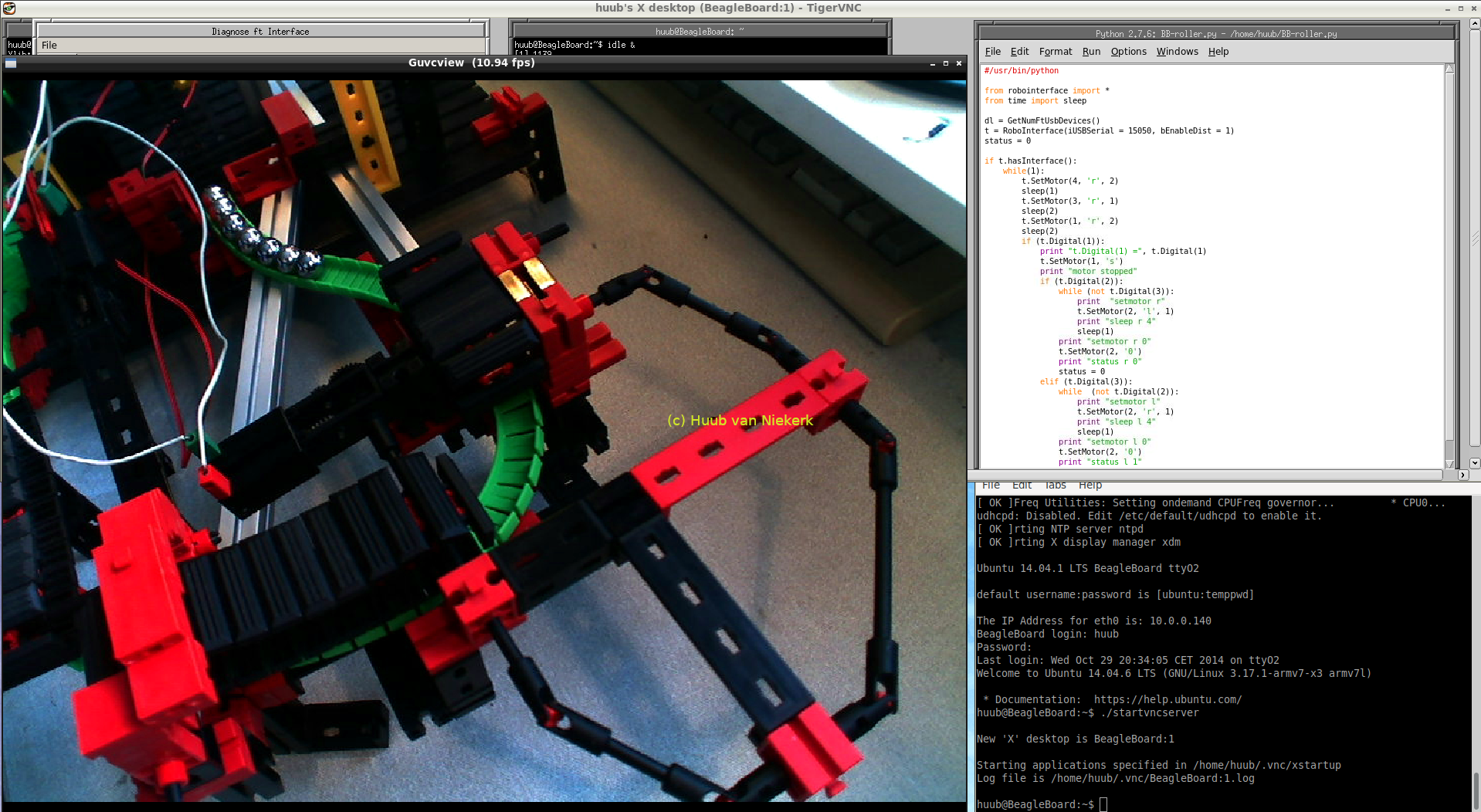
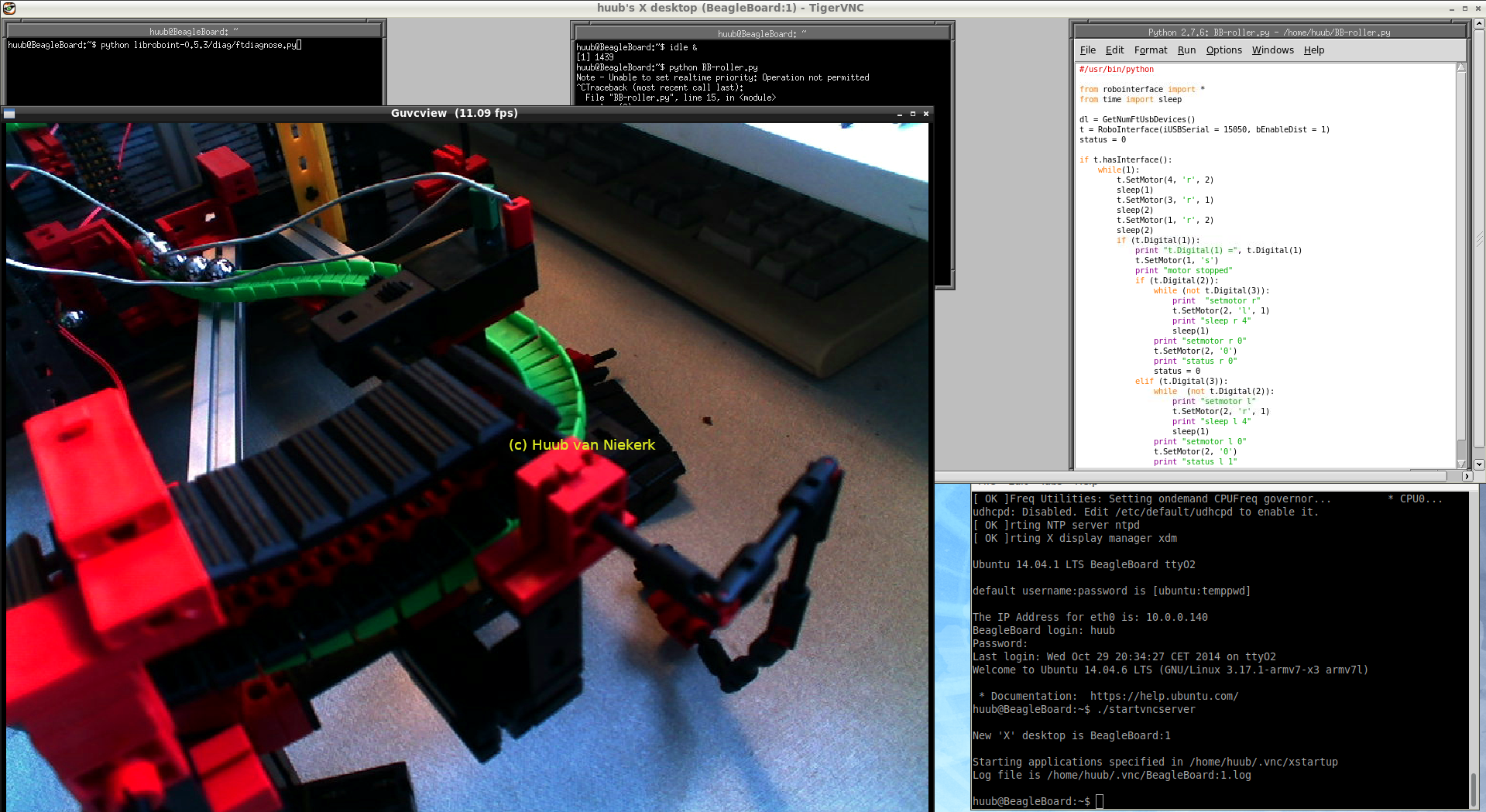
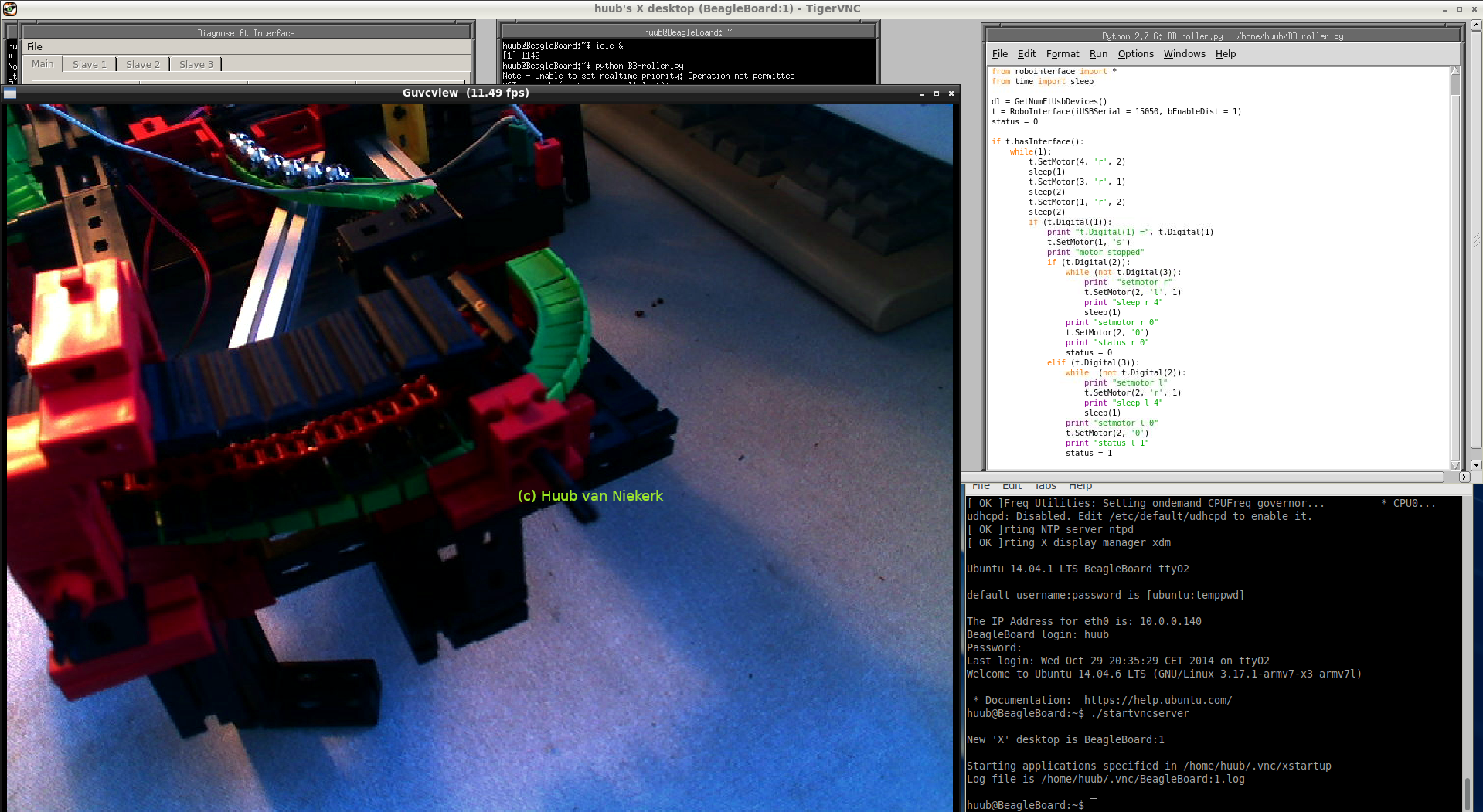
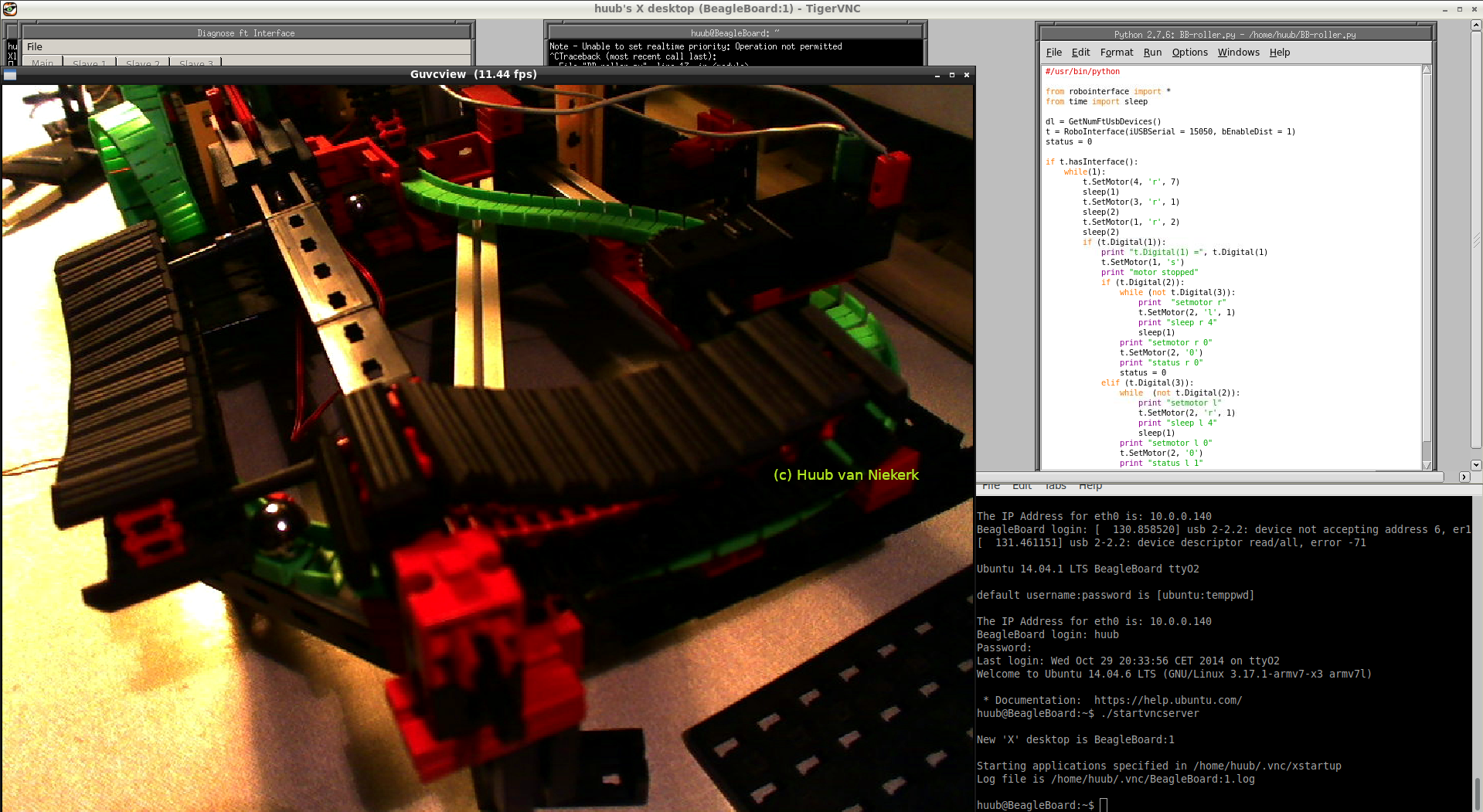
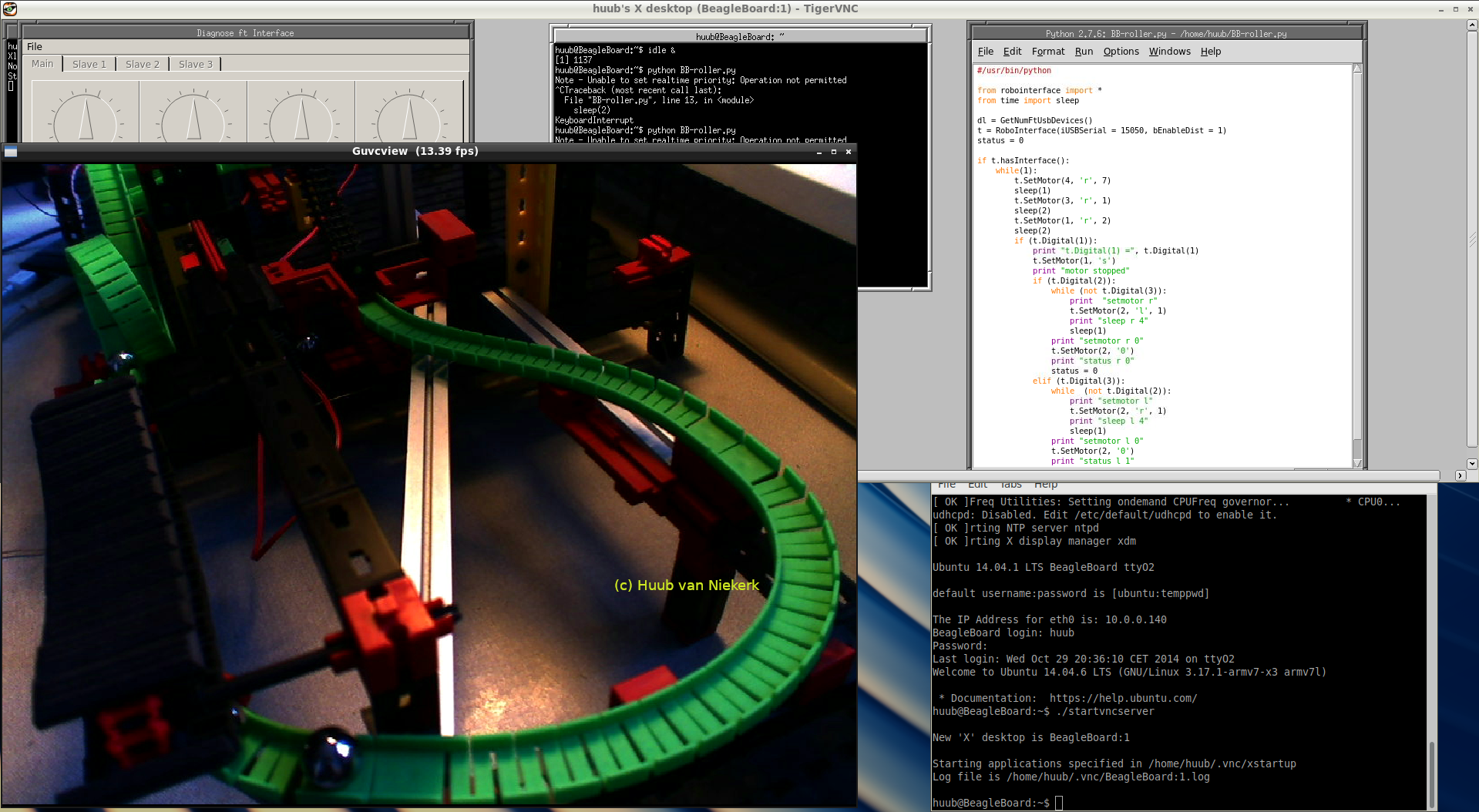
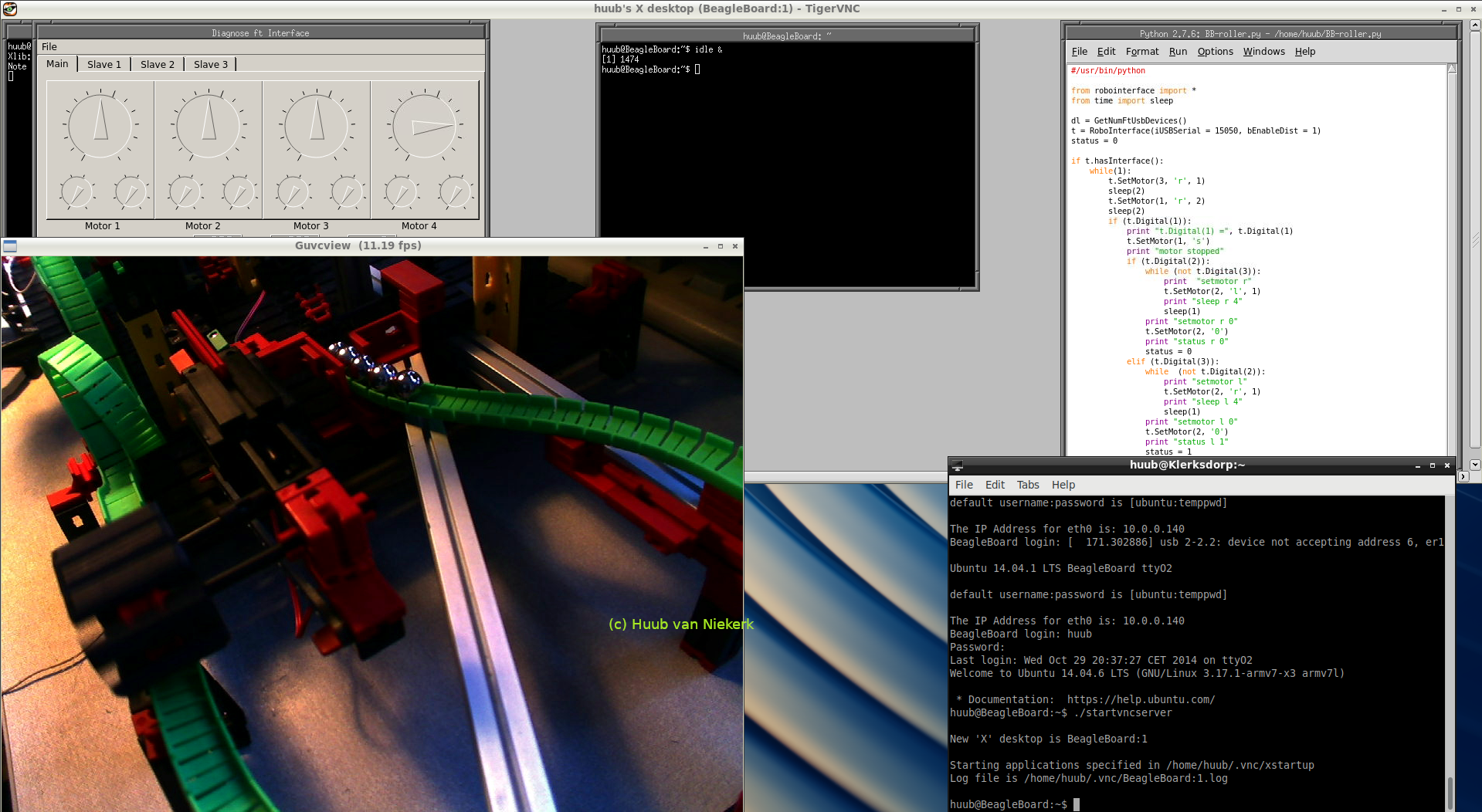
BeagleBoard & fischertechnik camera: First video on the combination with this camera. Does it work or does it need some work? Click the image to watch the video.
18 December Blog 405
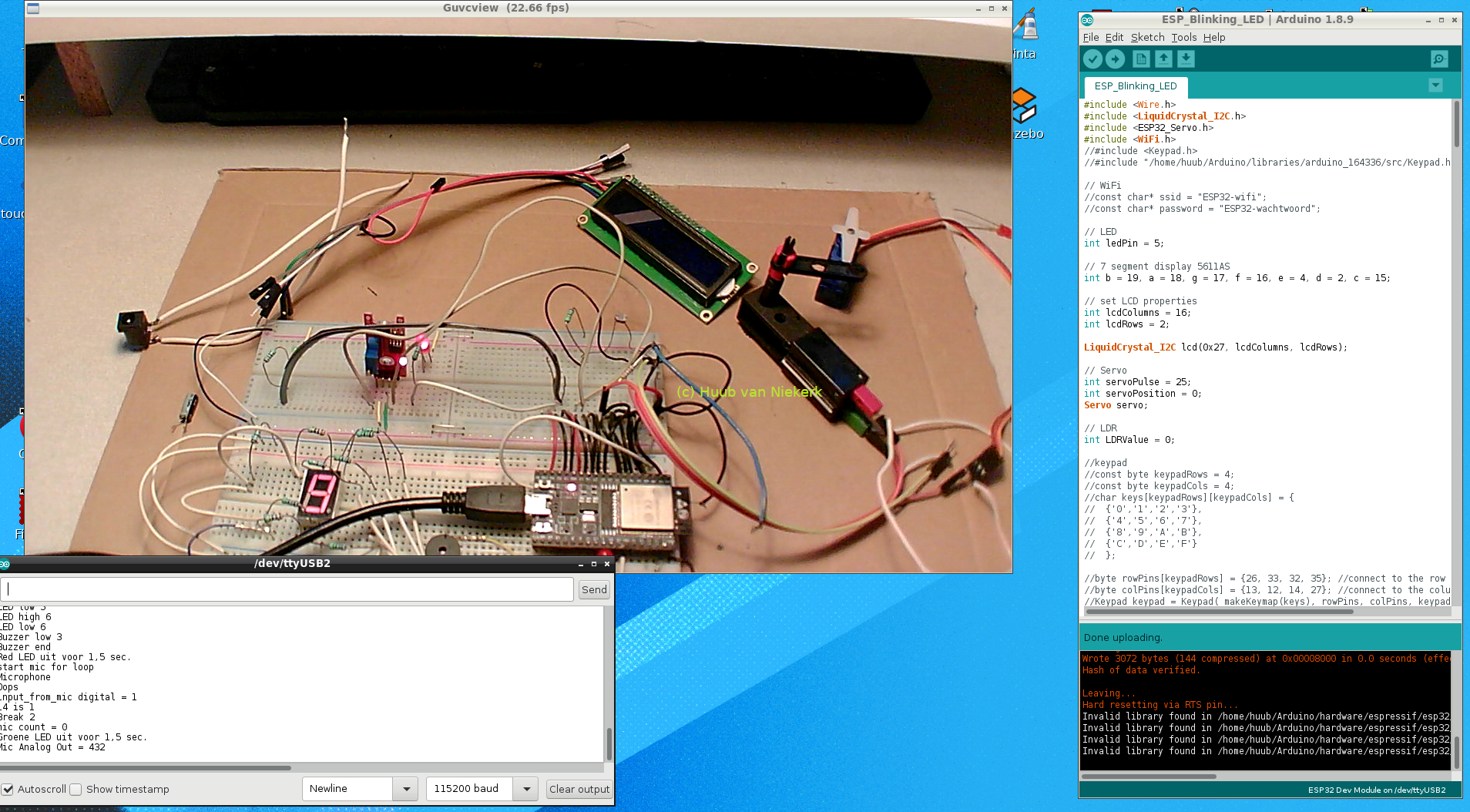
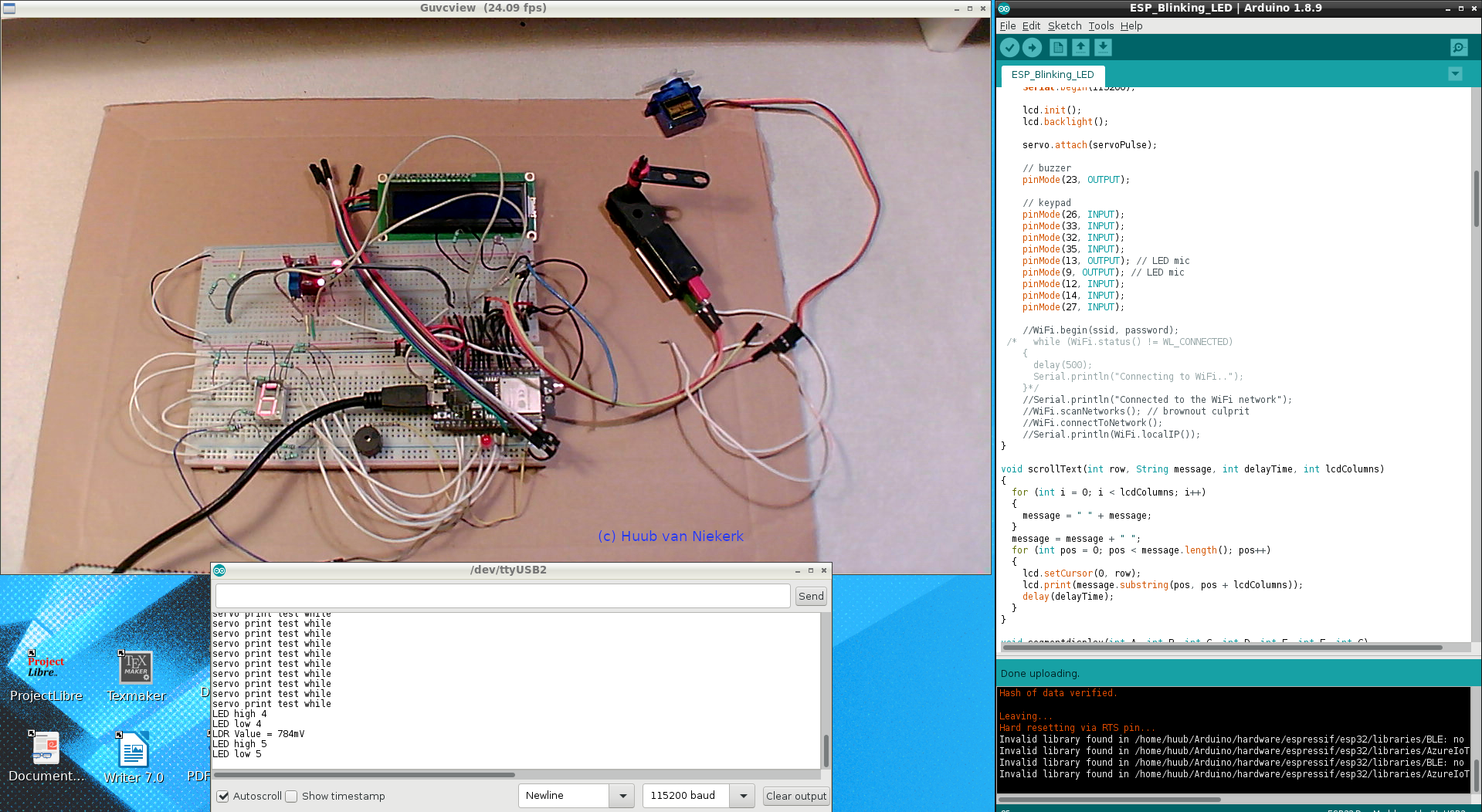
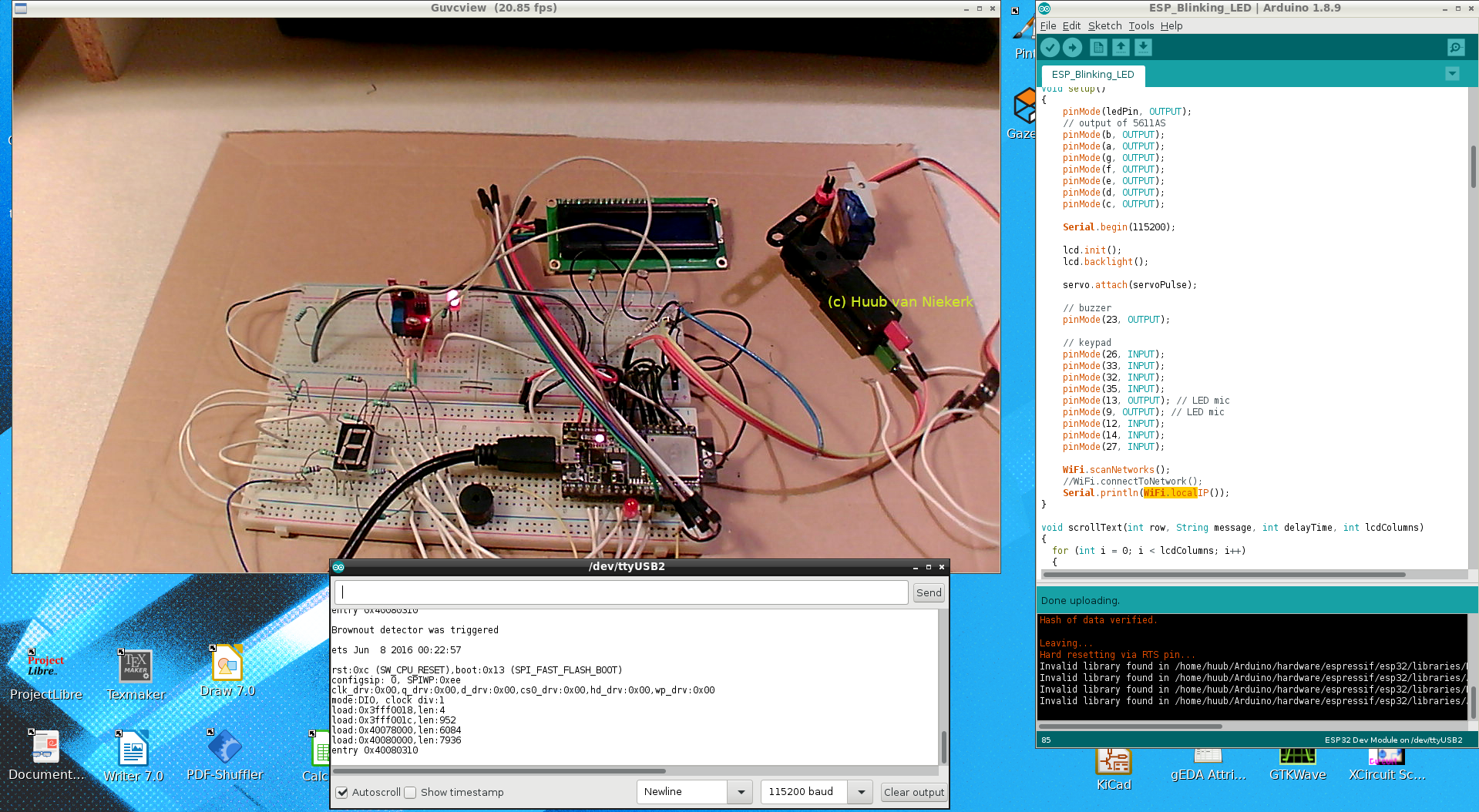
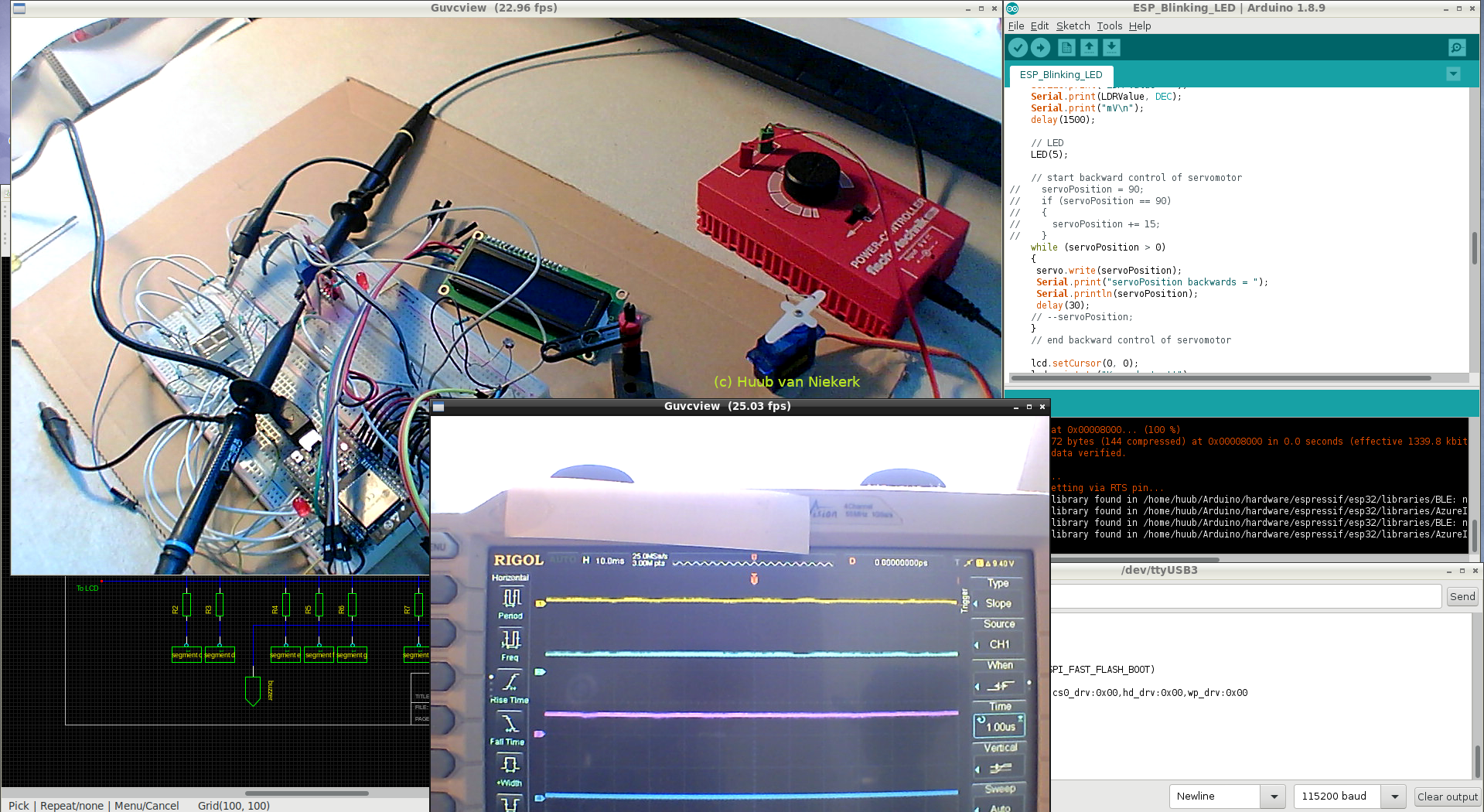
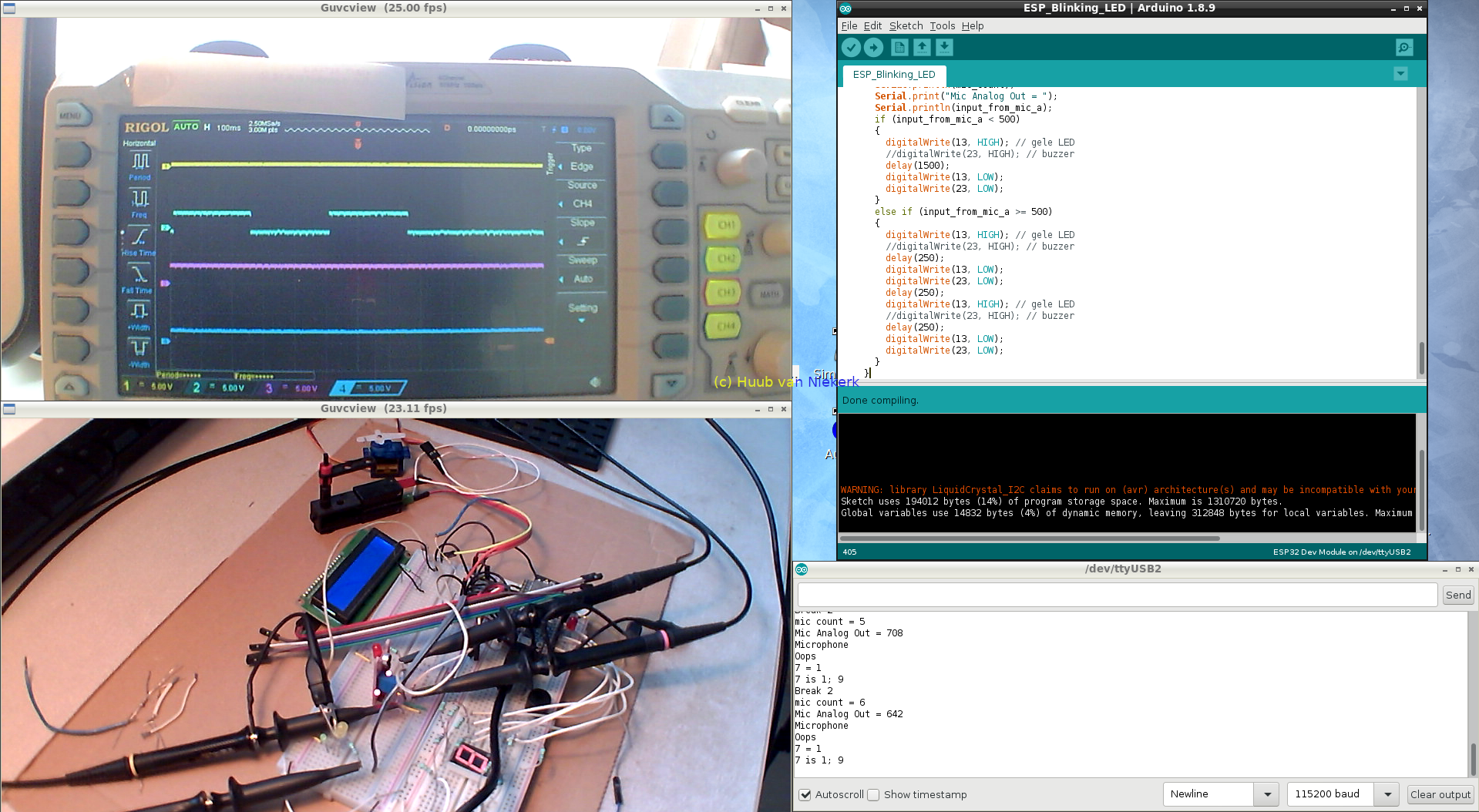
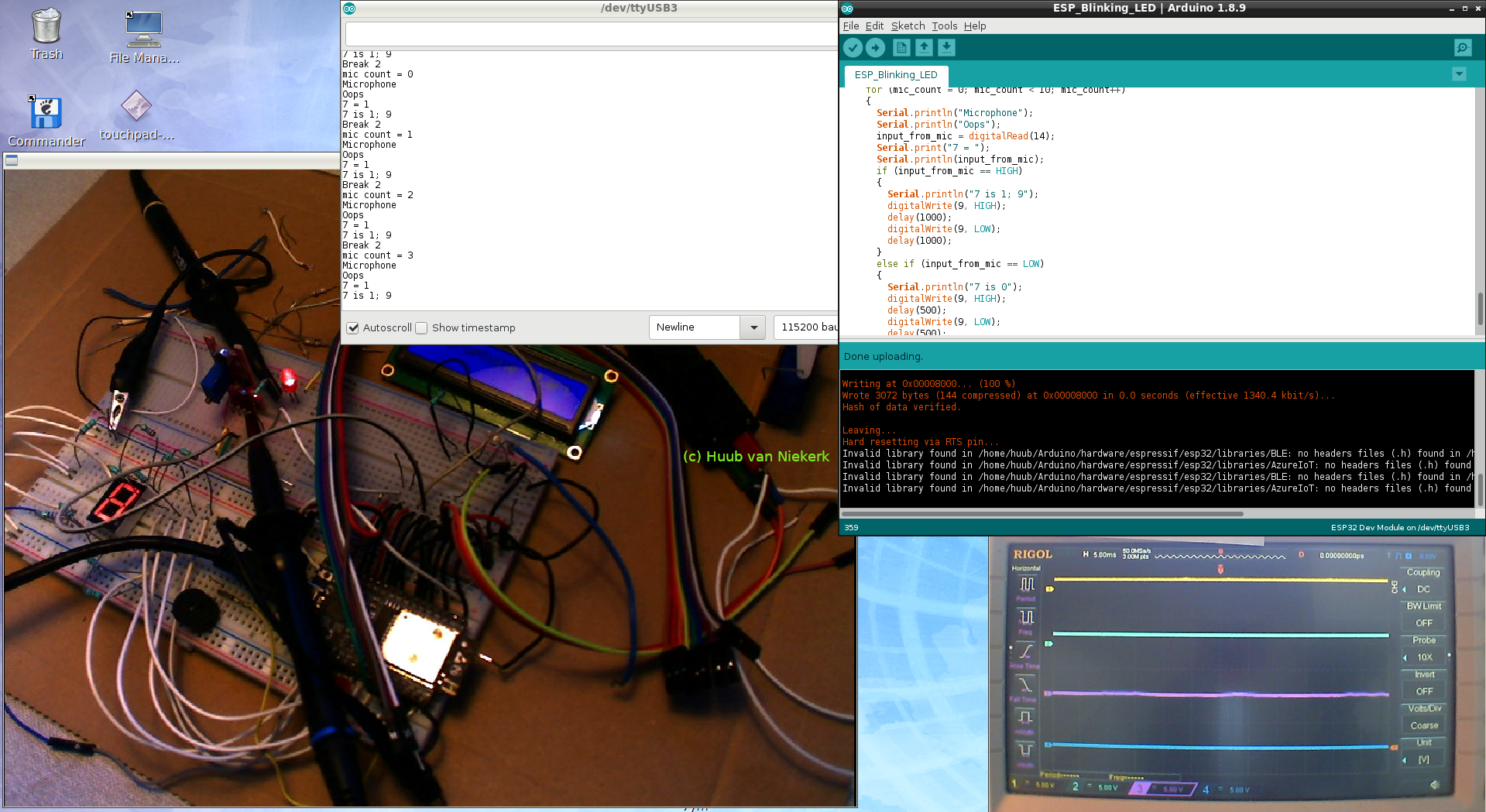
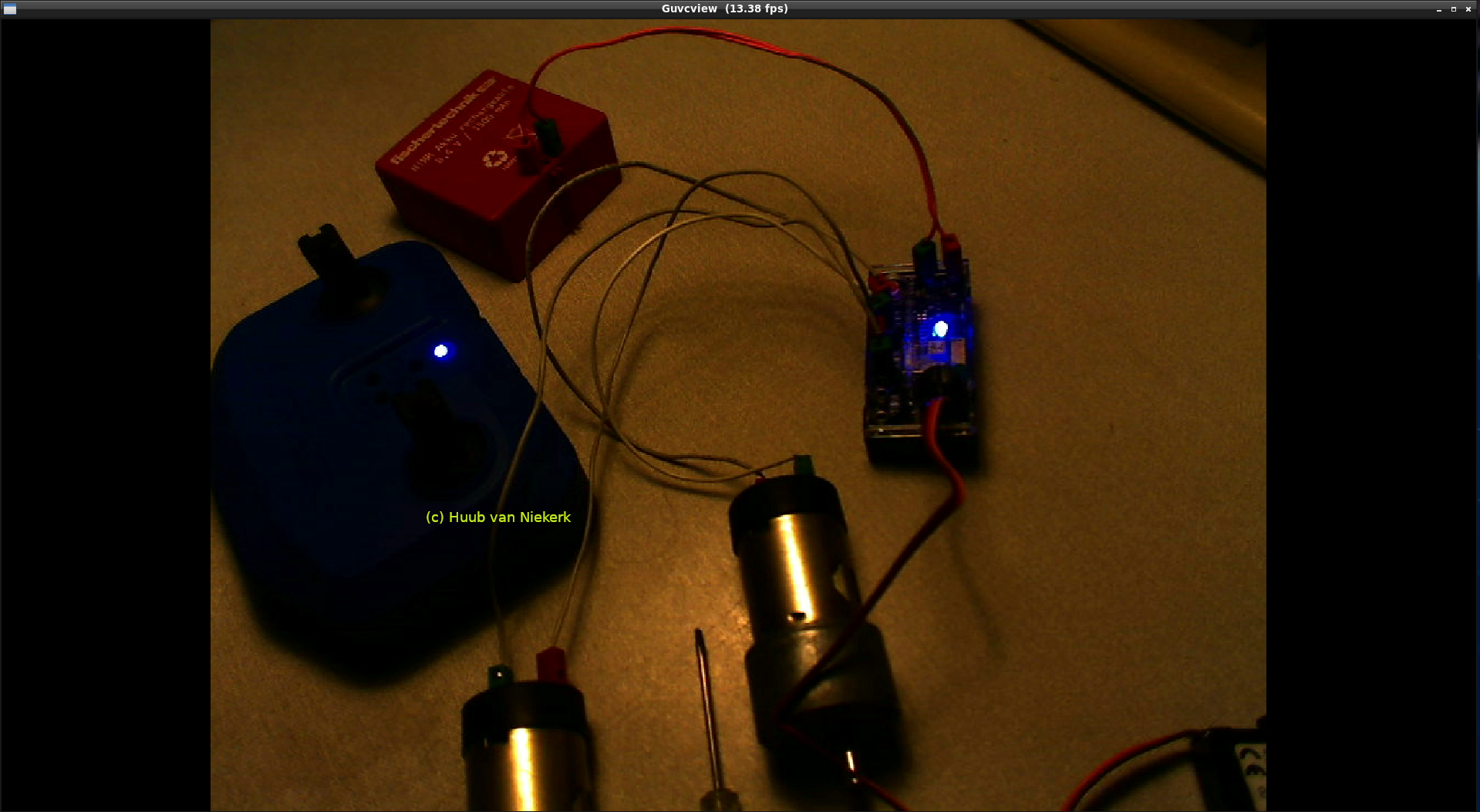
ESP32: Next attempt to get WiFi working. I need to stabilize power somehow. After preparing a fix, I find I need (to do) more. Click the image to watch the video.
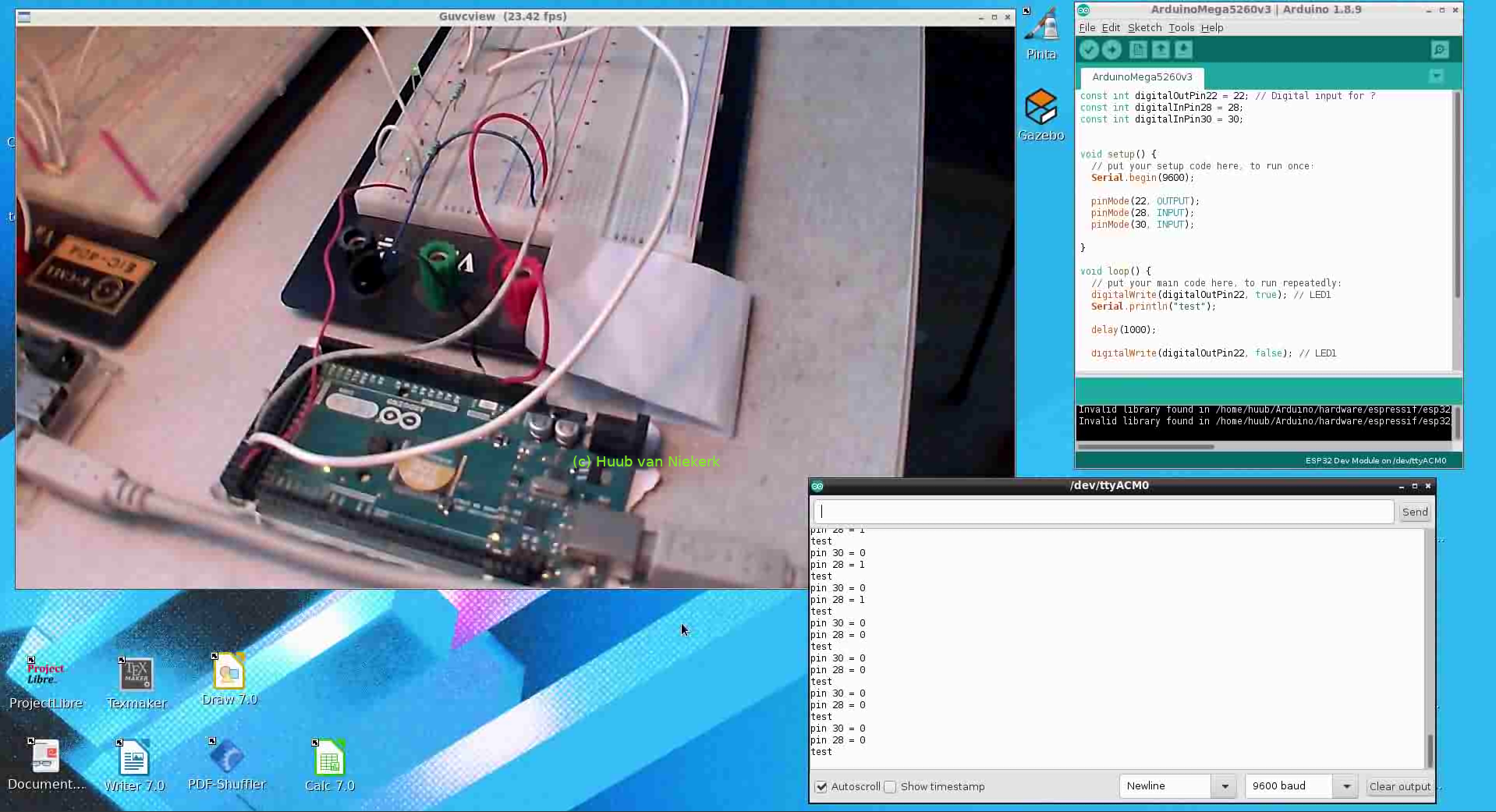
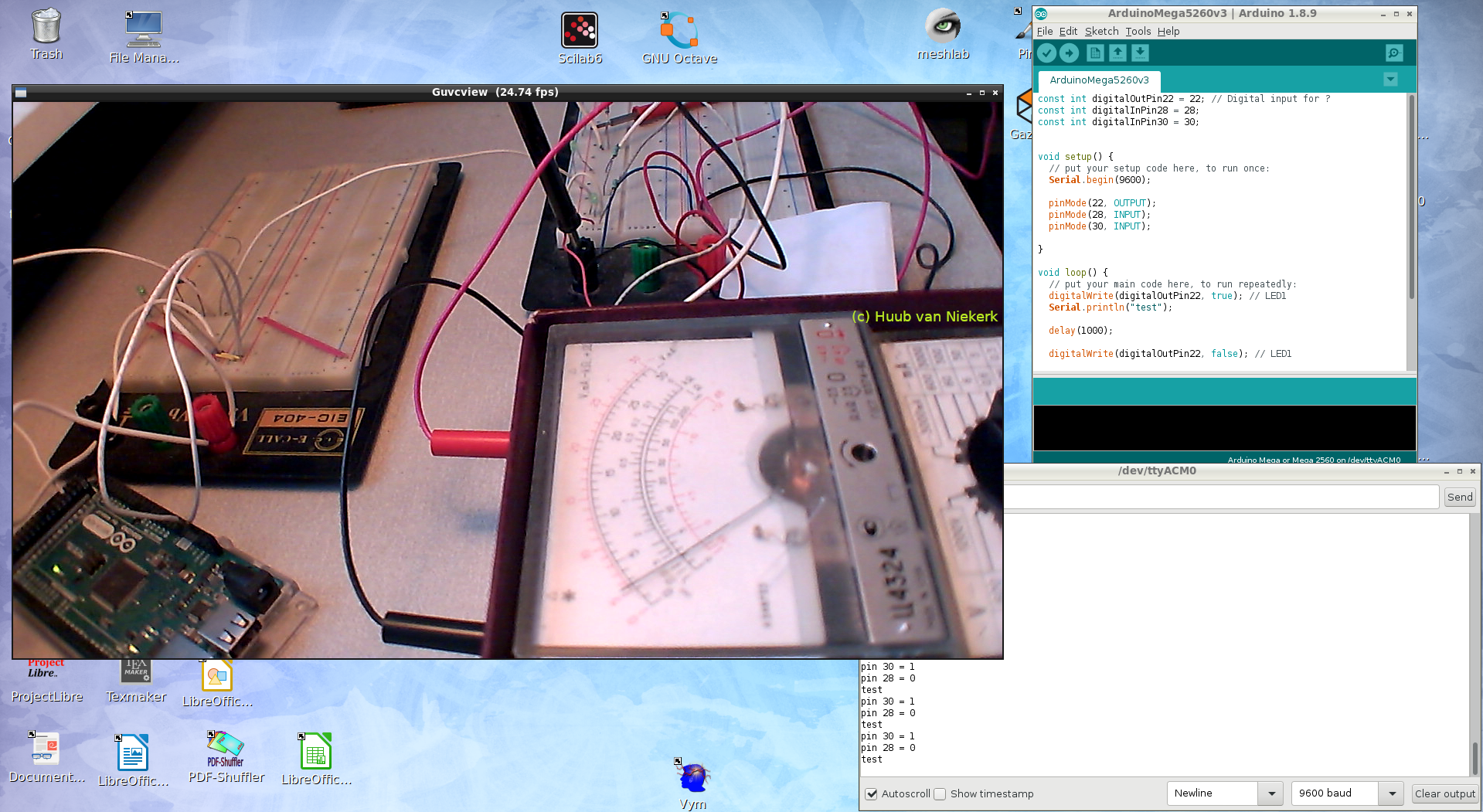
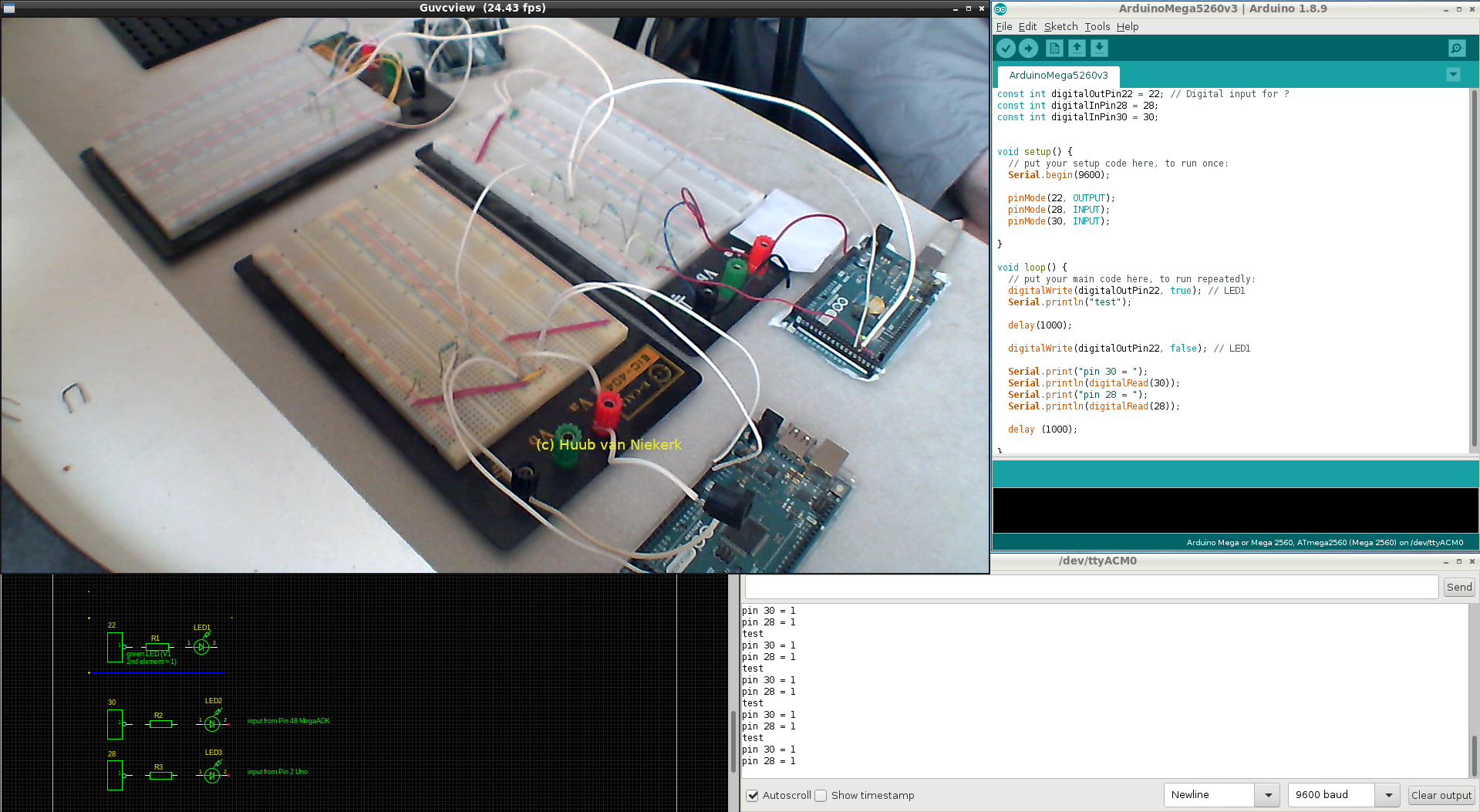
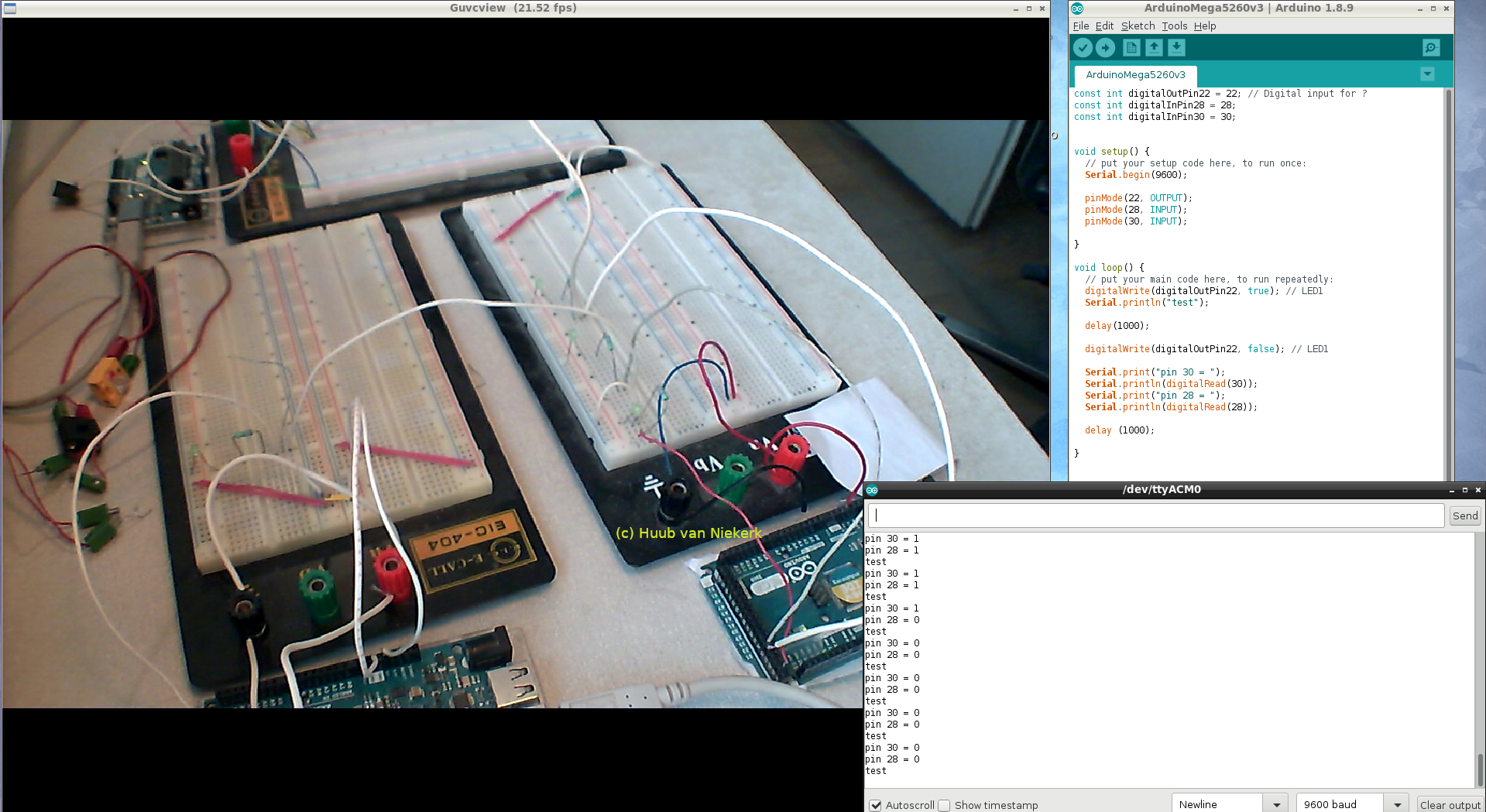
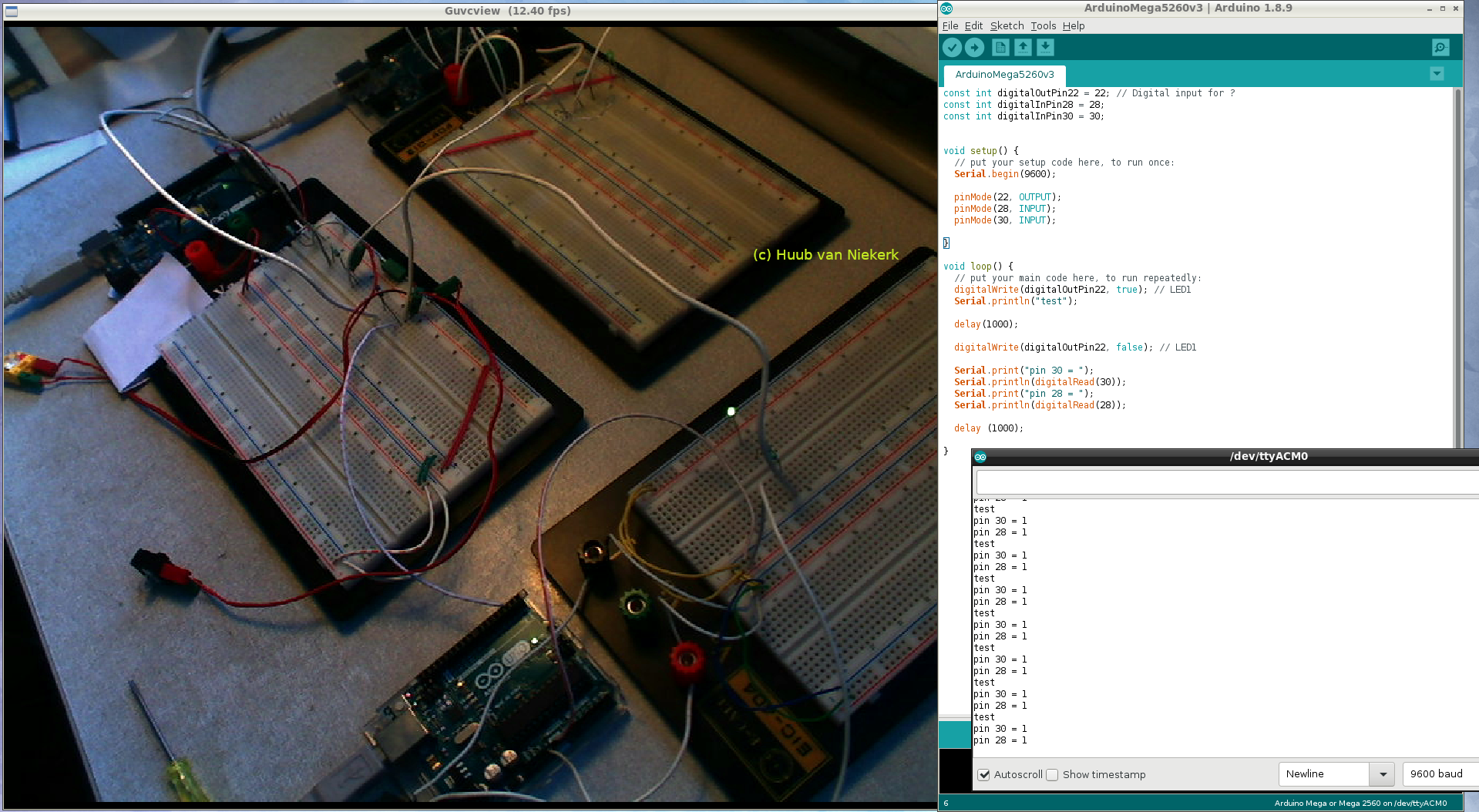
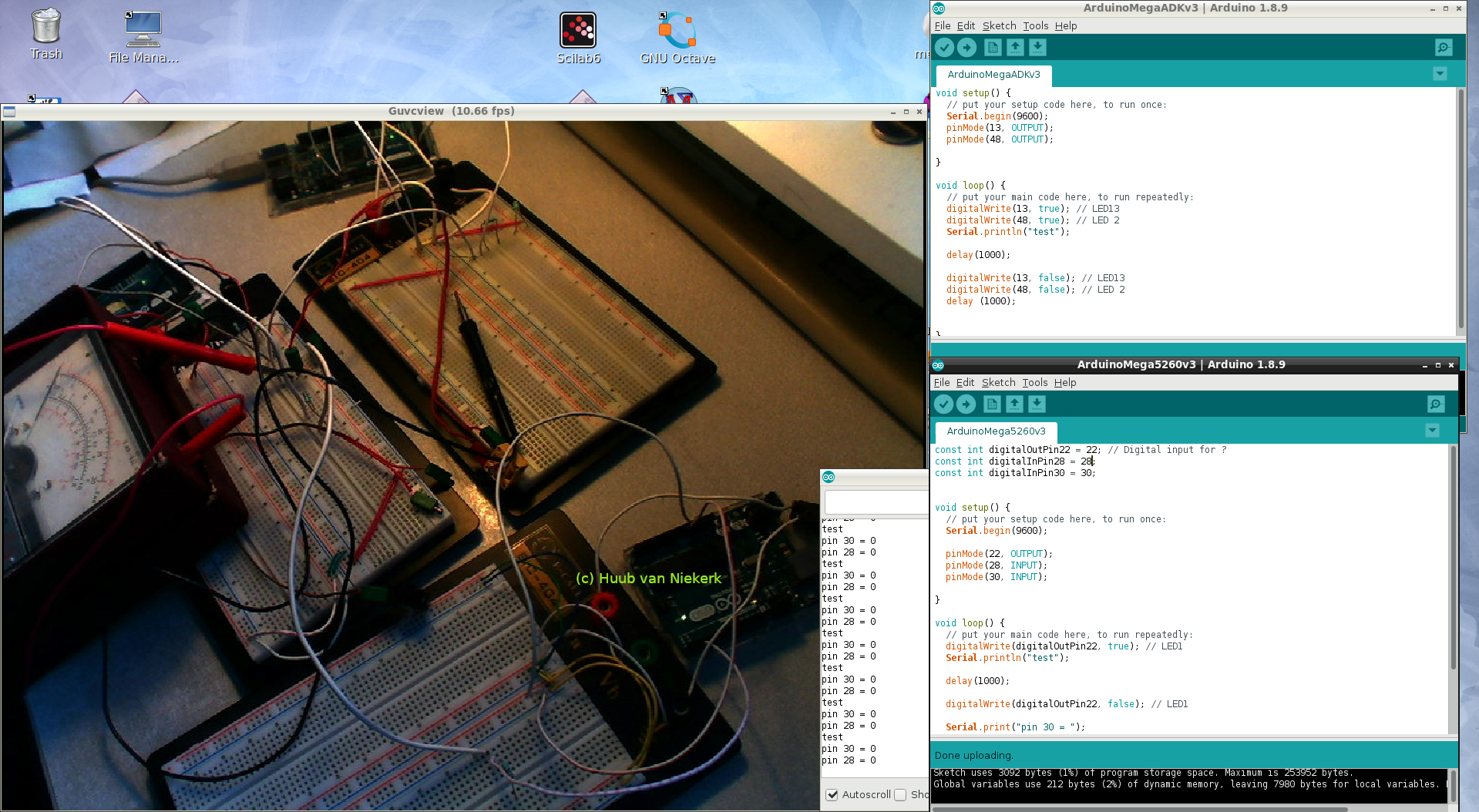
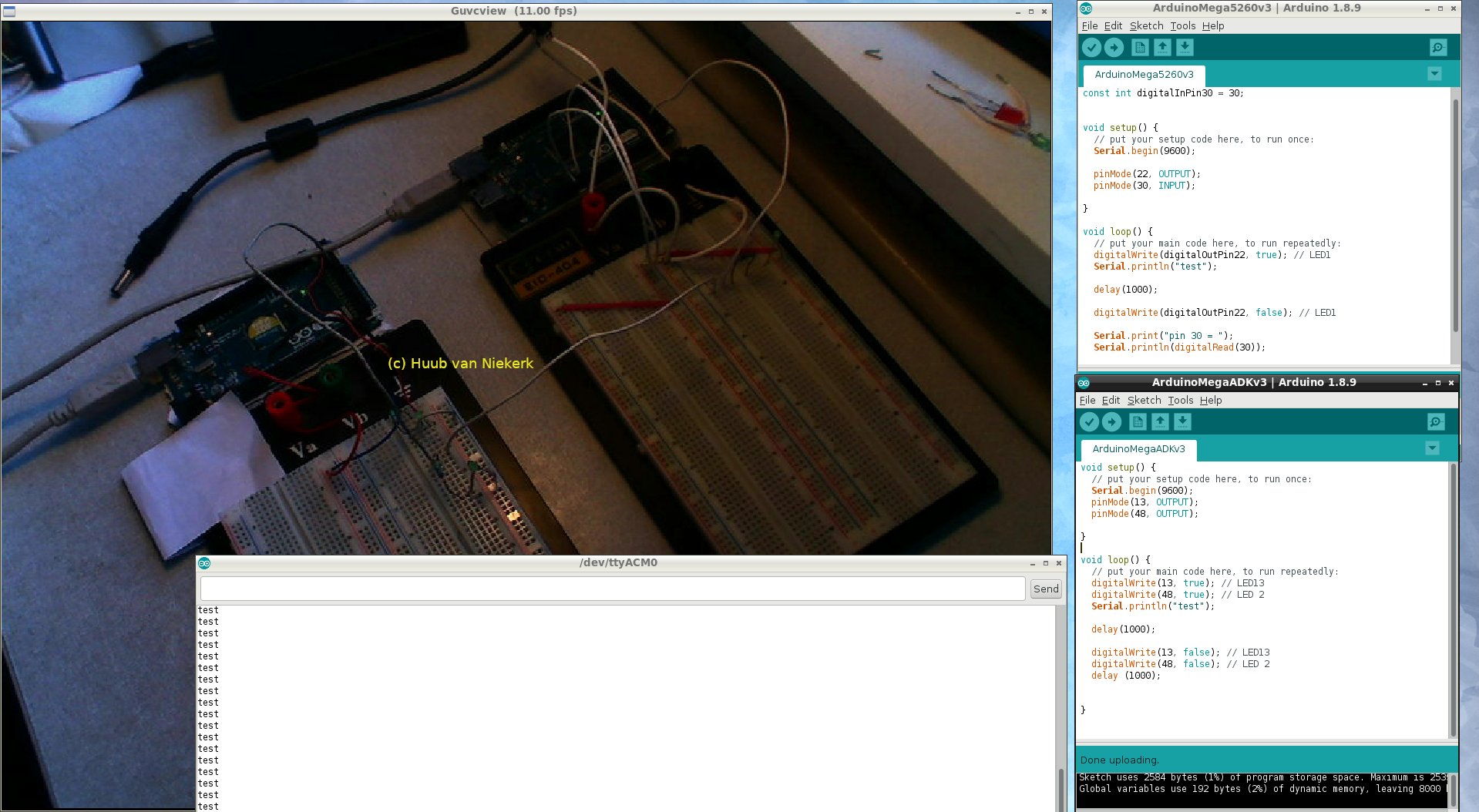
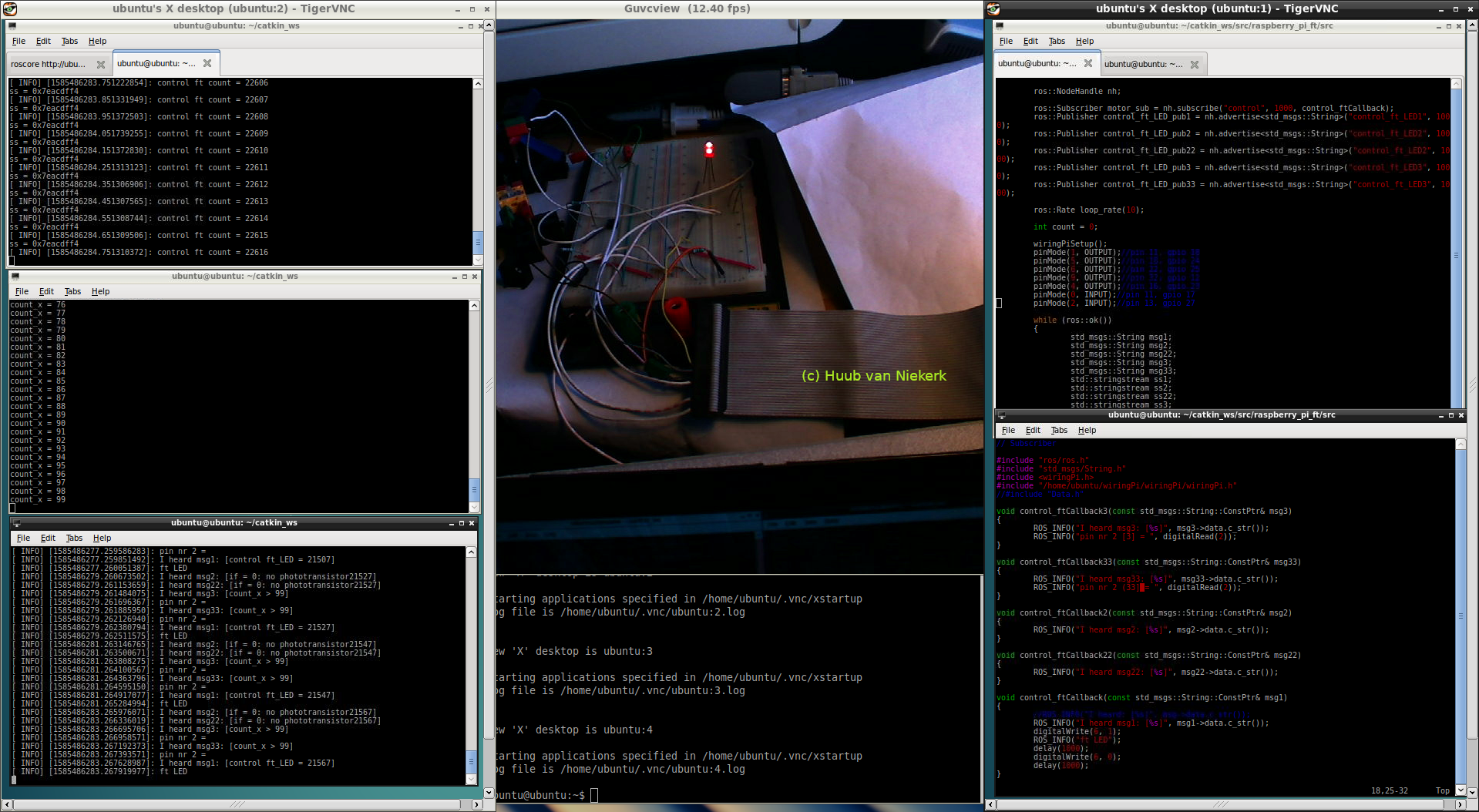
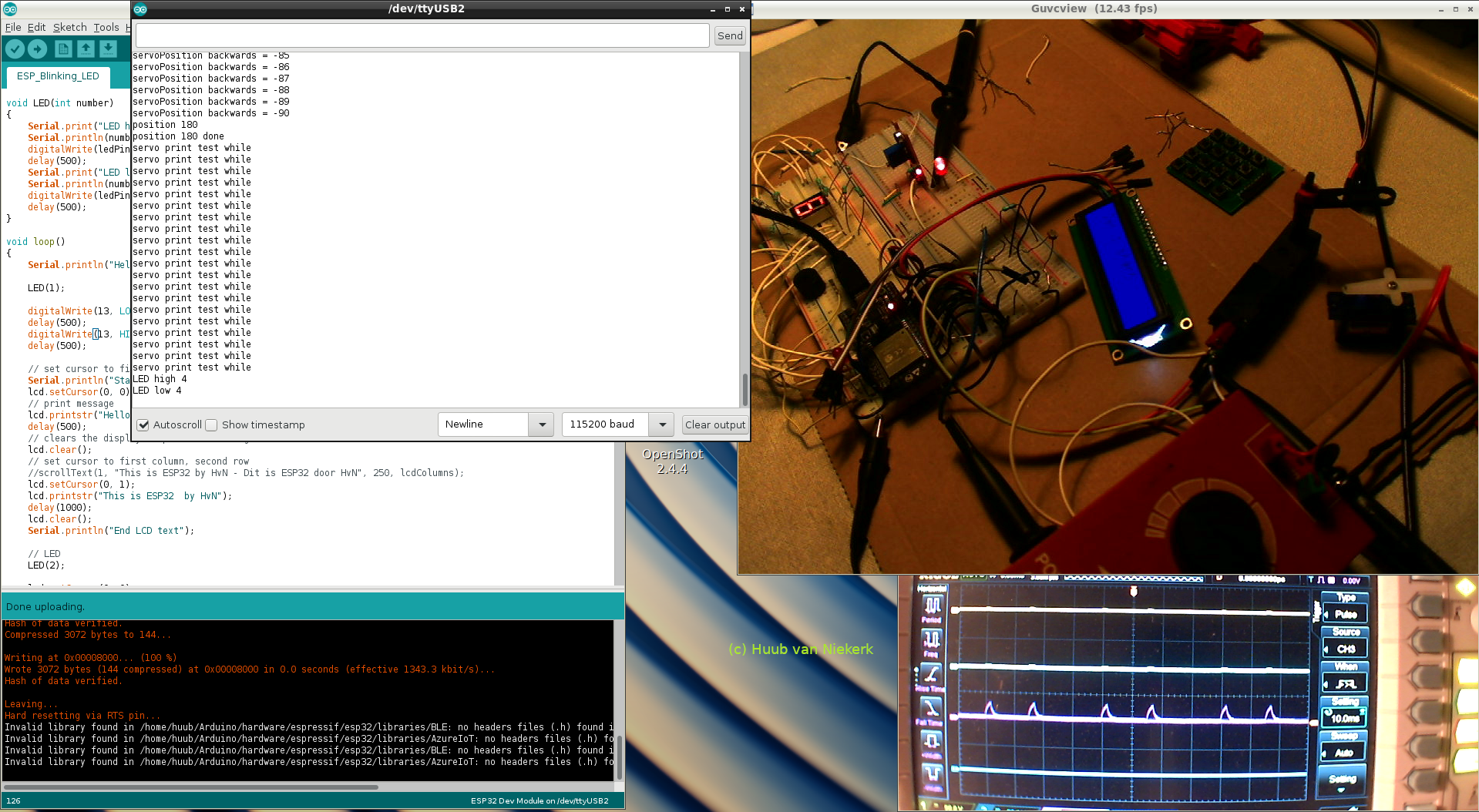
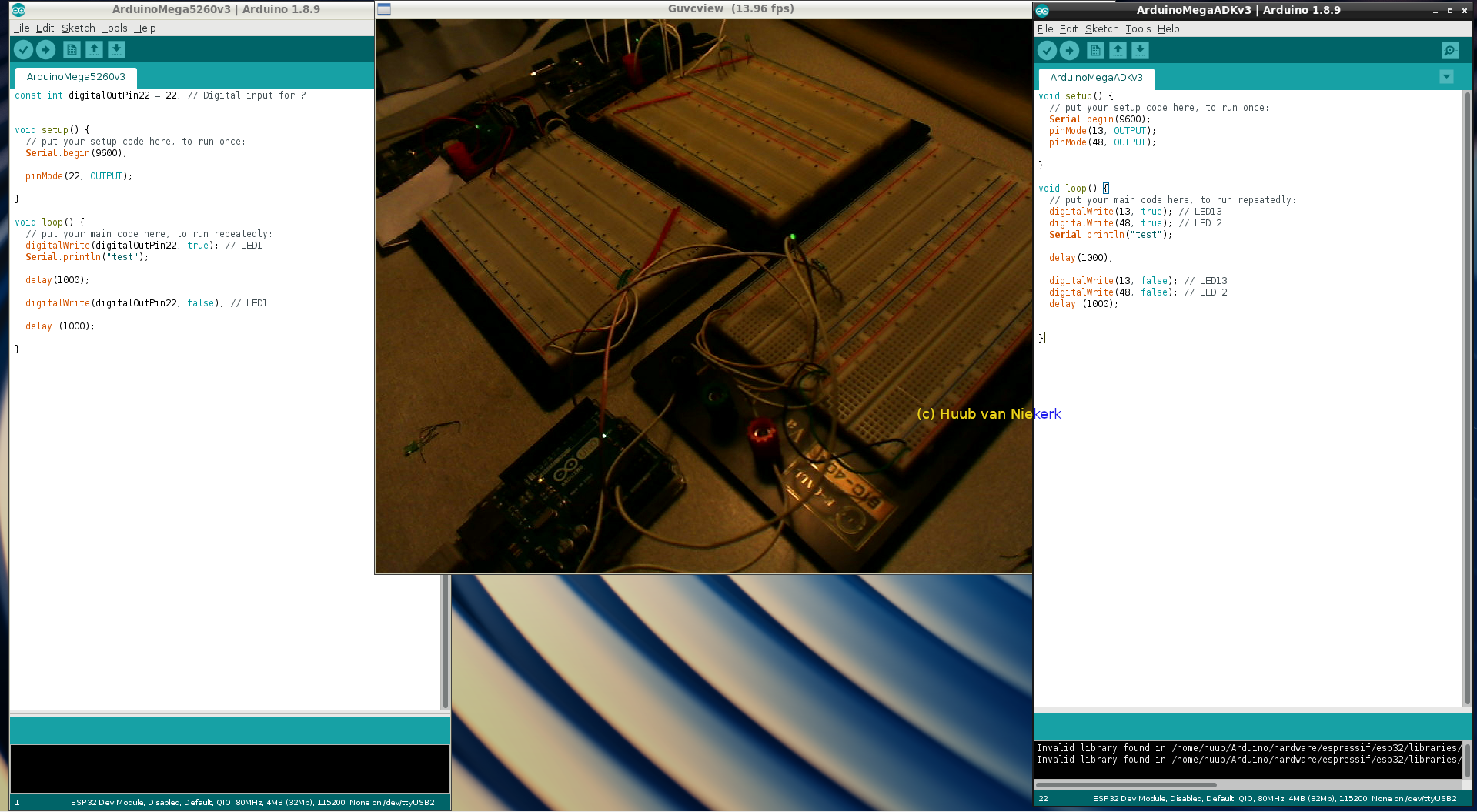
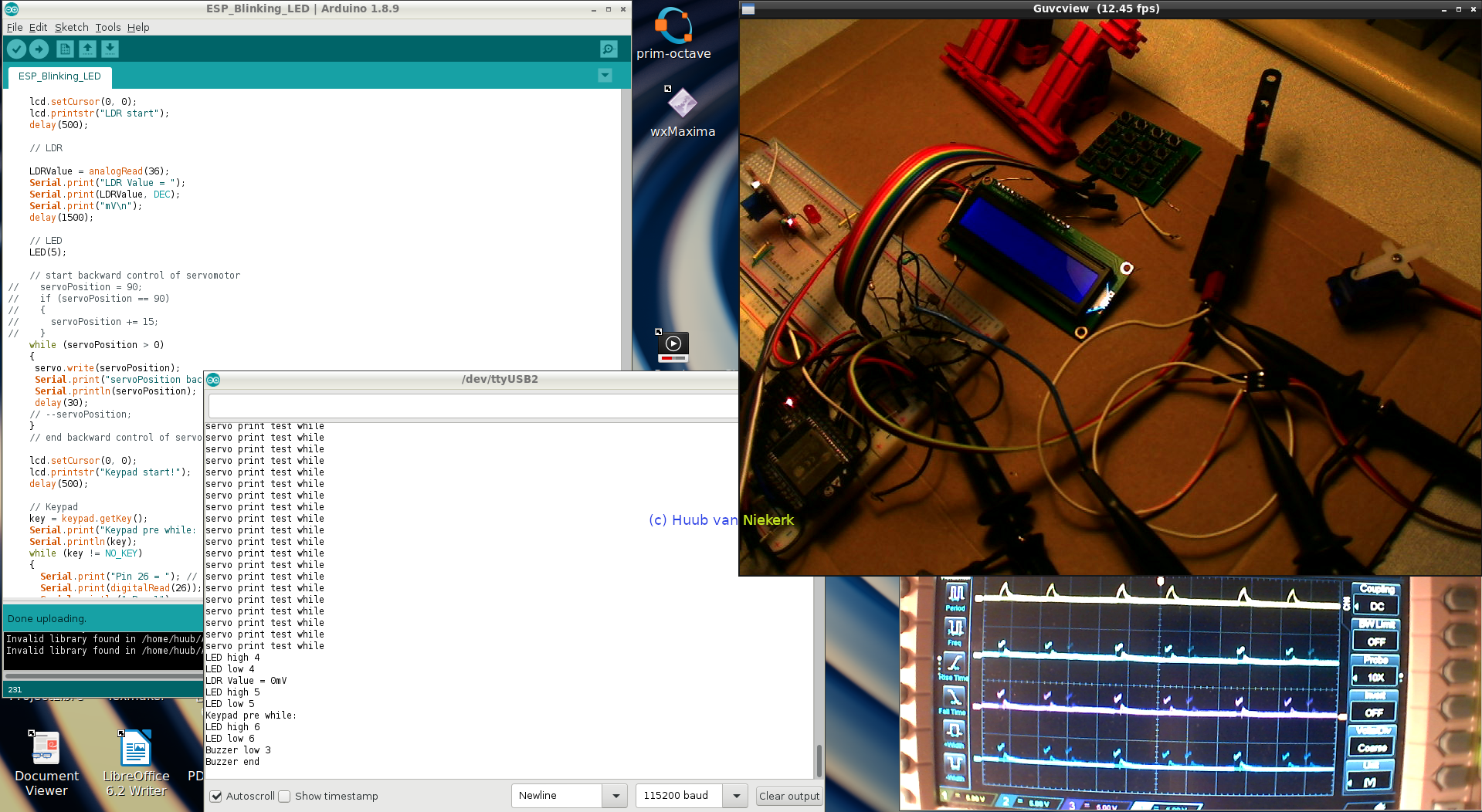
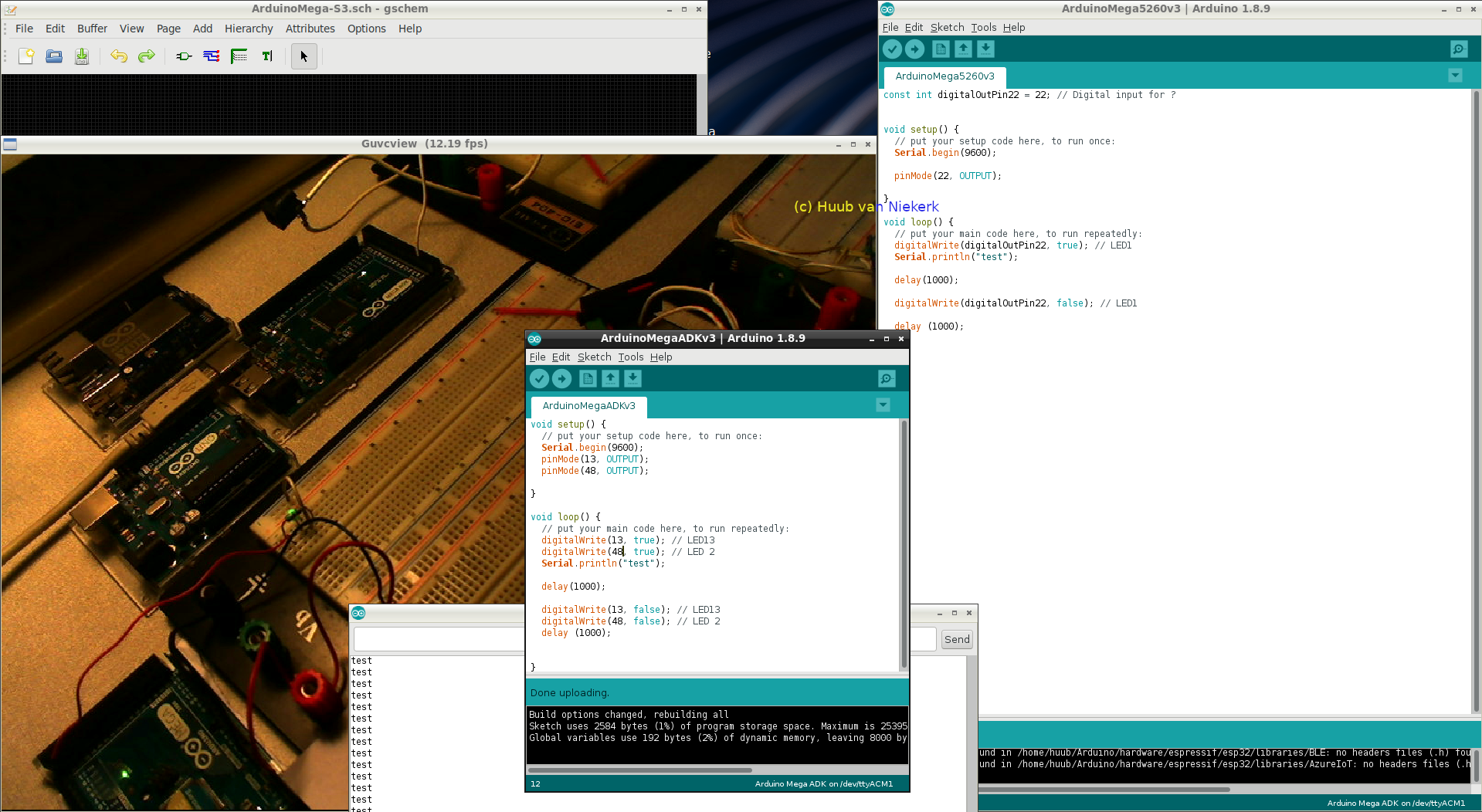
Arduino Mega2560: Using 3 different Arduino's, 3 computers and 3 cameras, last time's problem still needs a fix. Measurements and additions should give an answer, but do they? Click the image to watch the video.
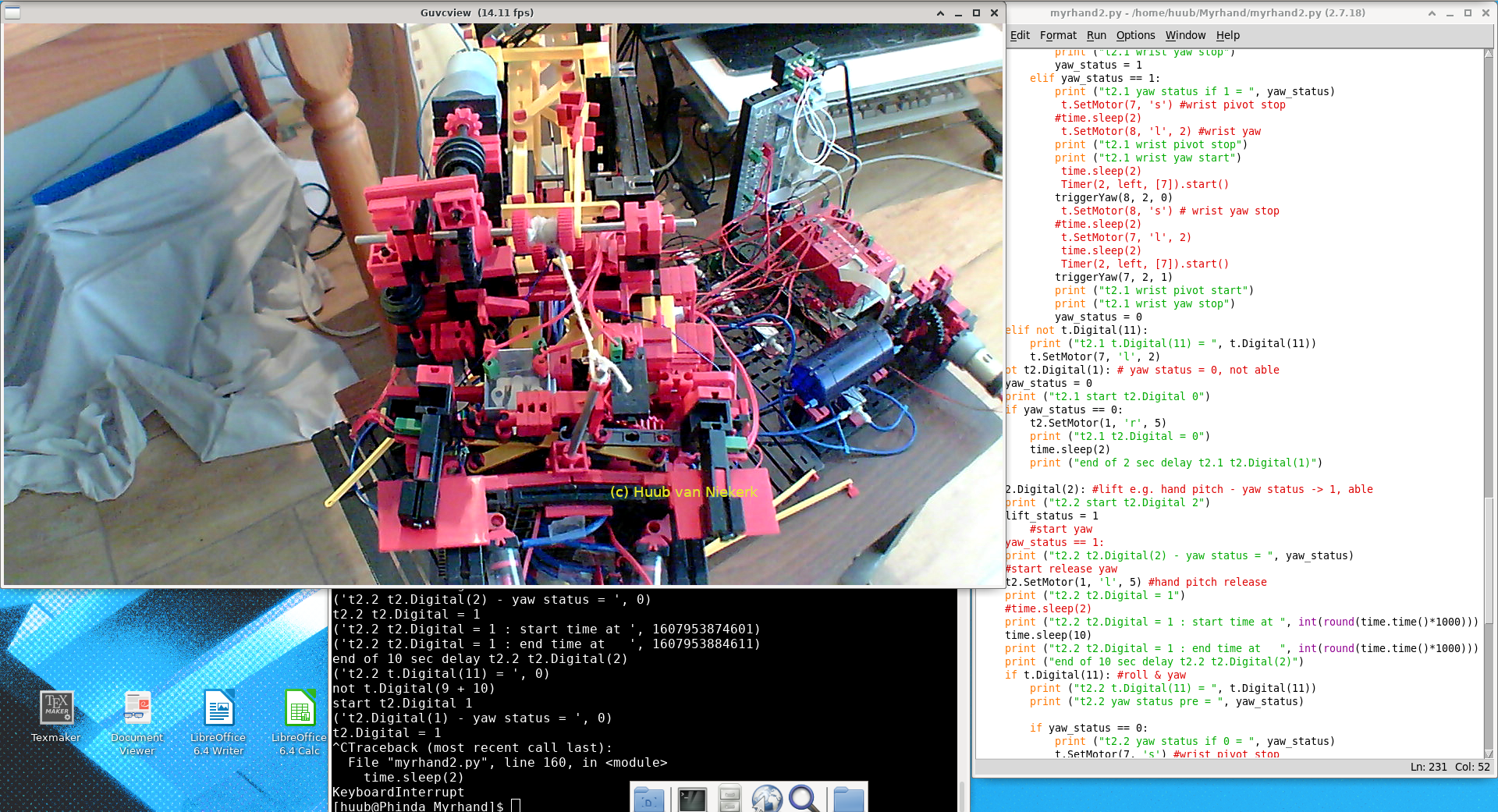
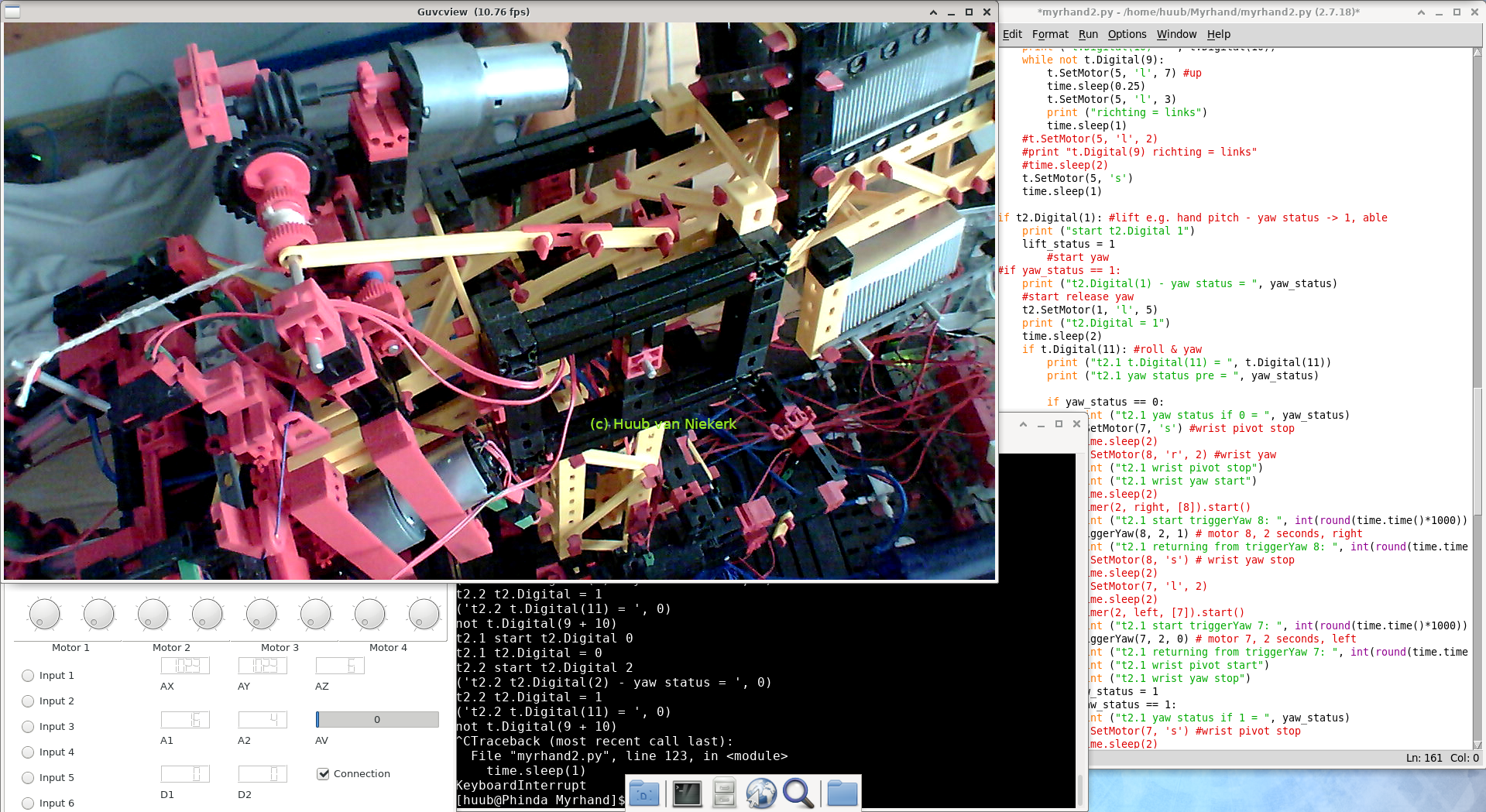
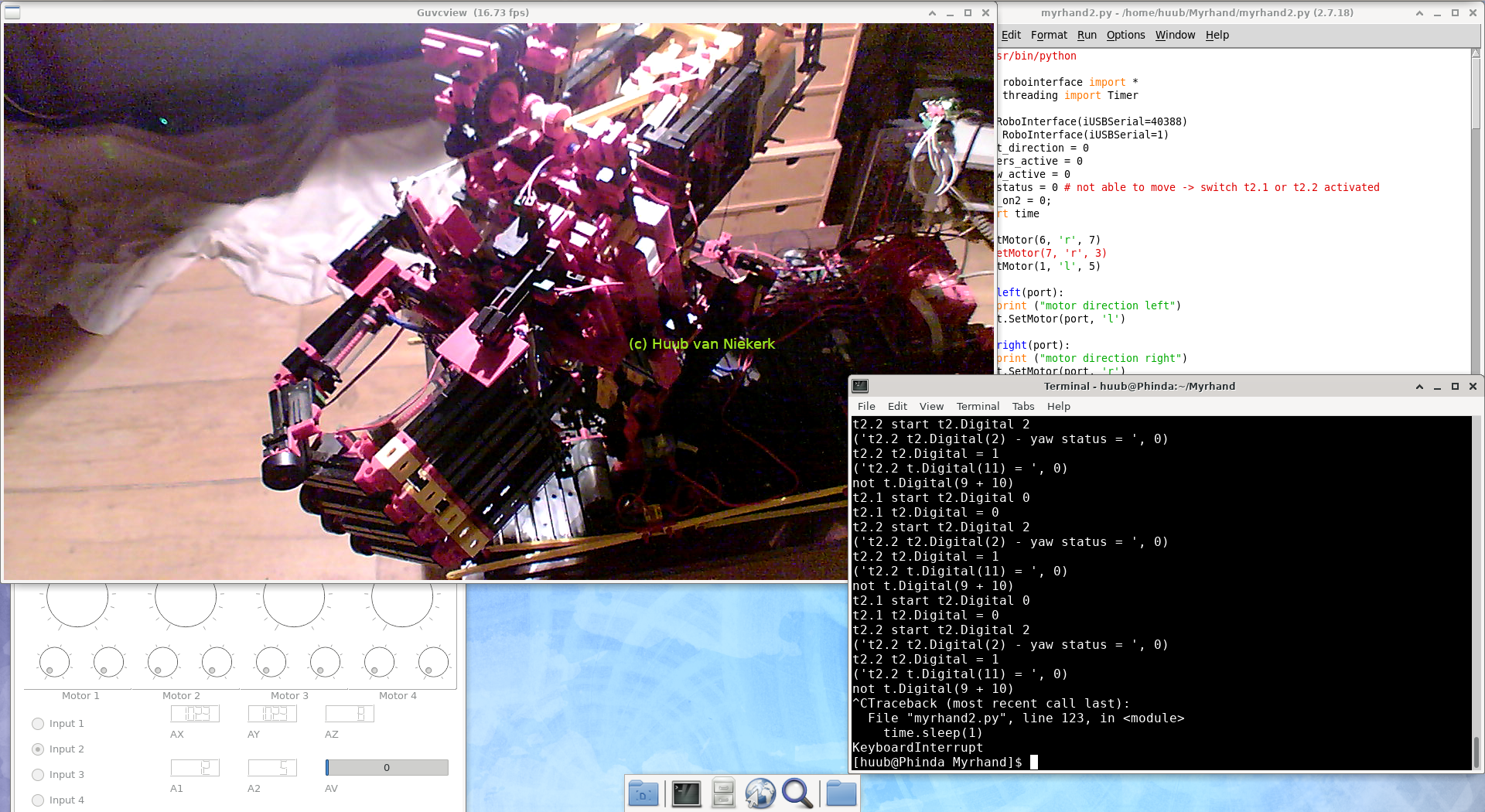
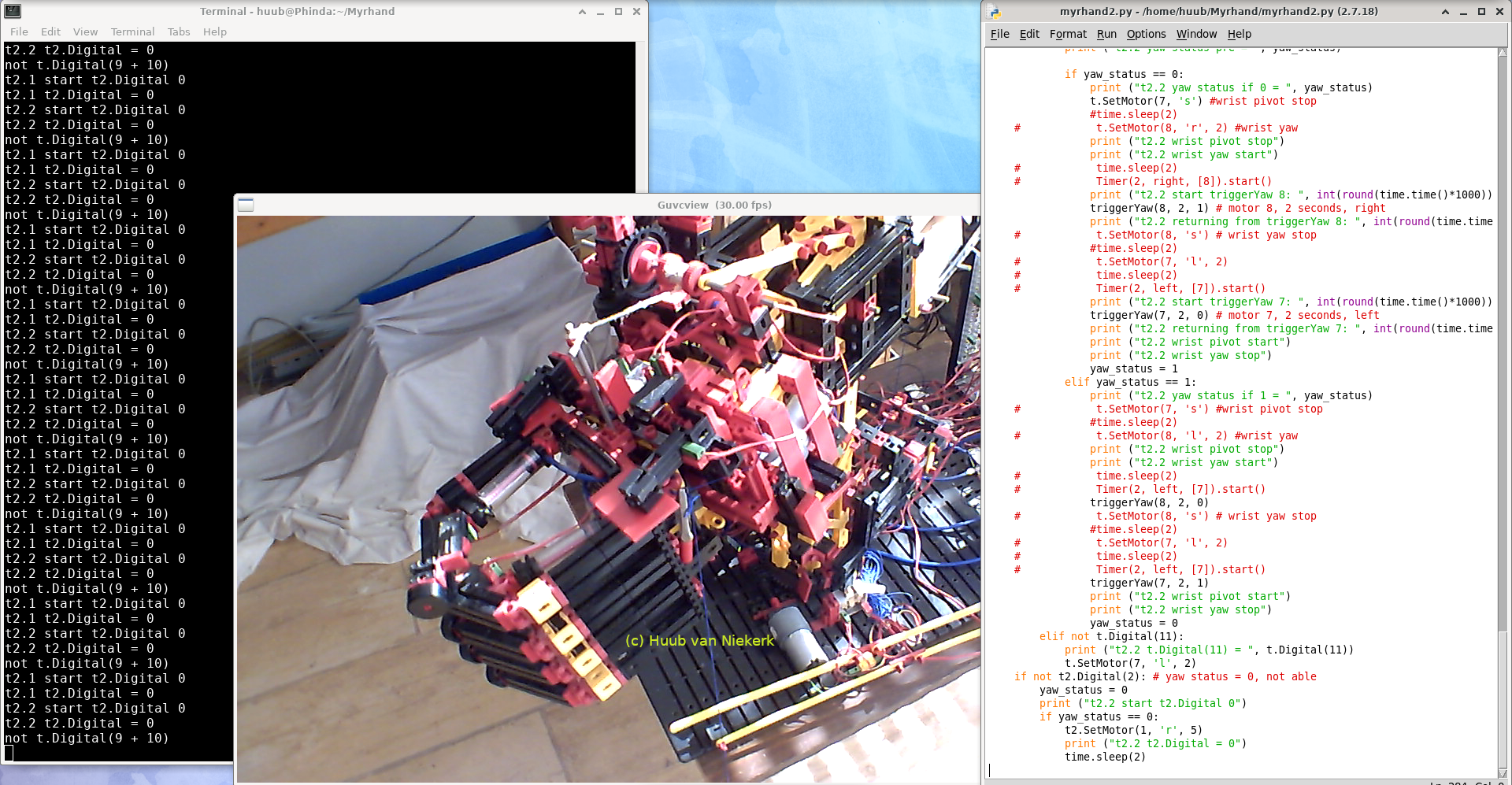
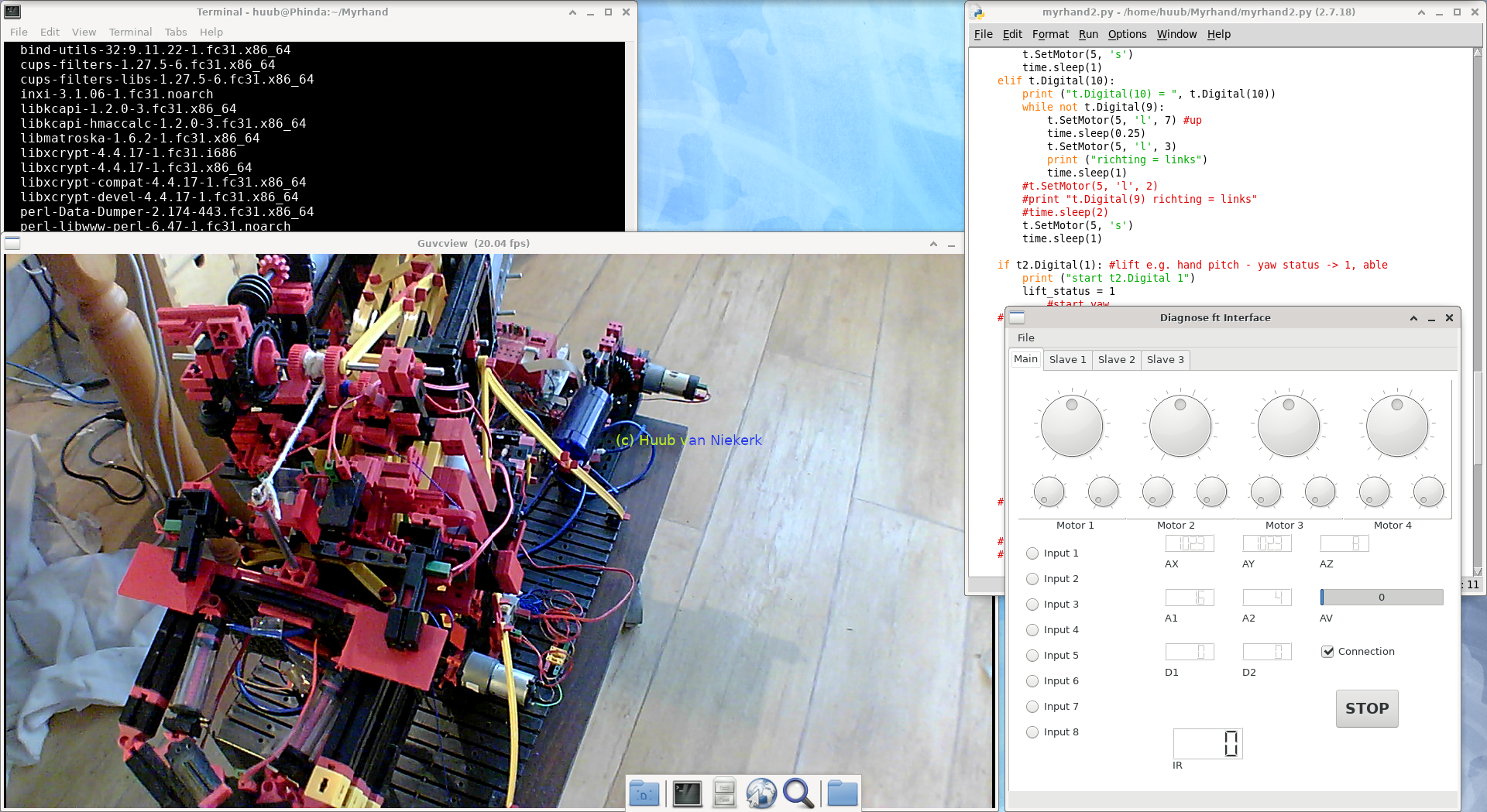
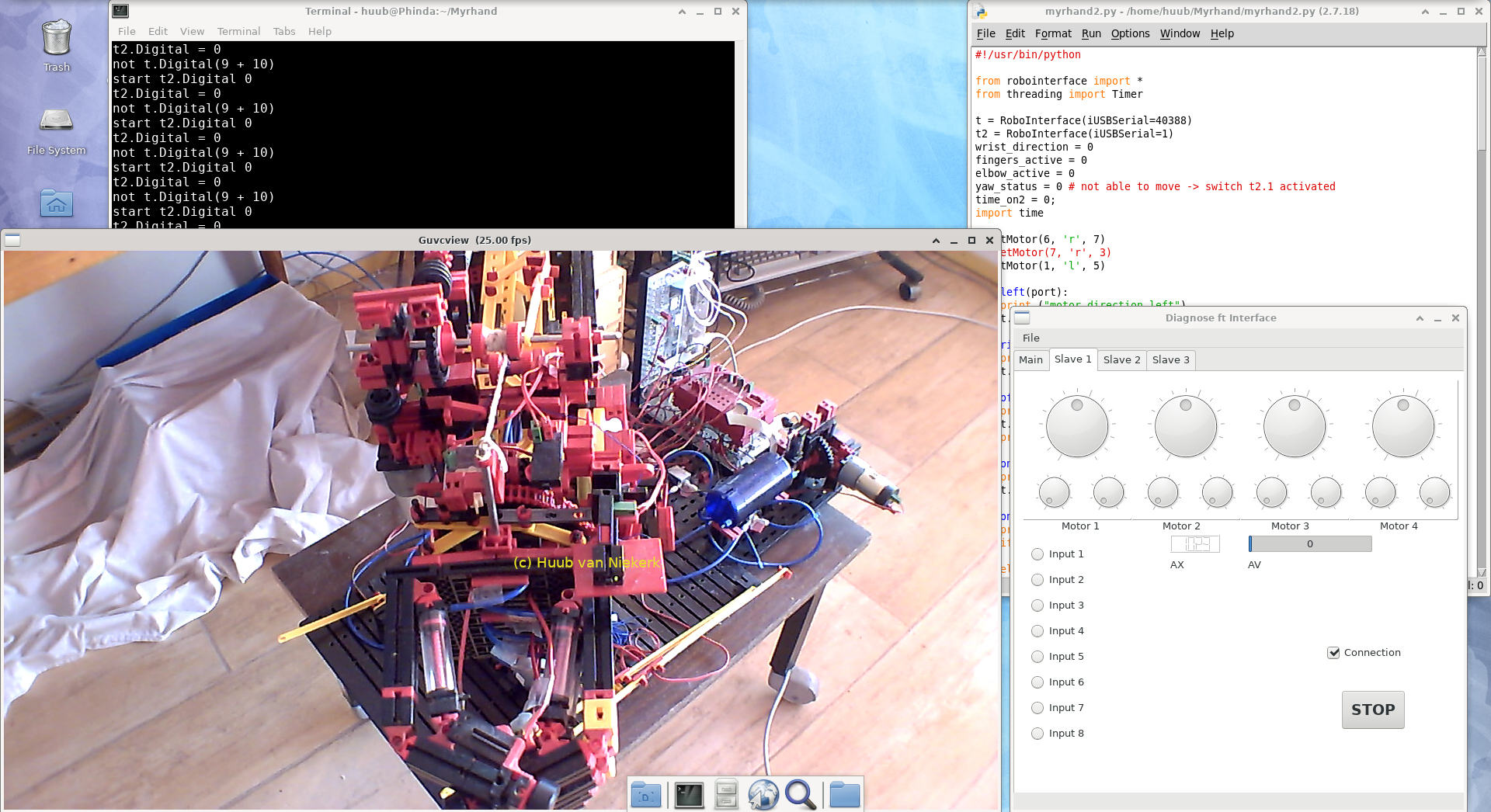
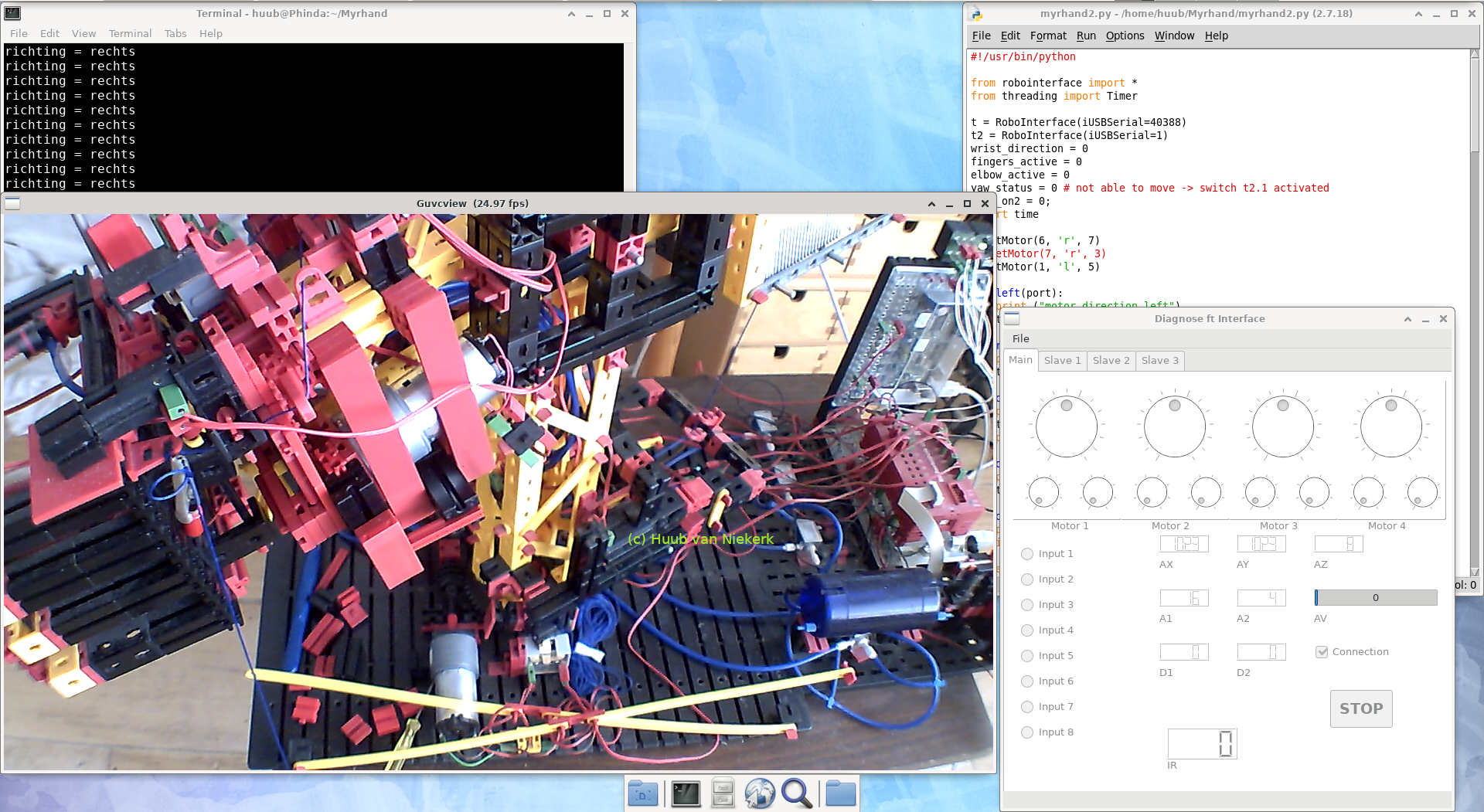
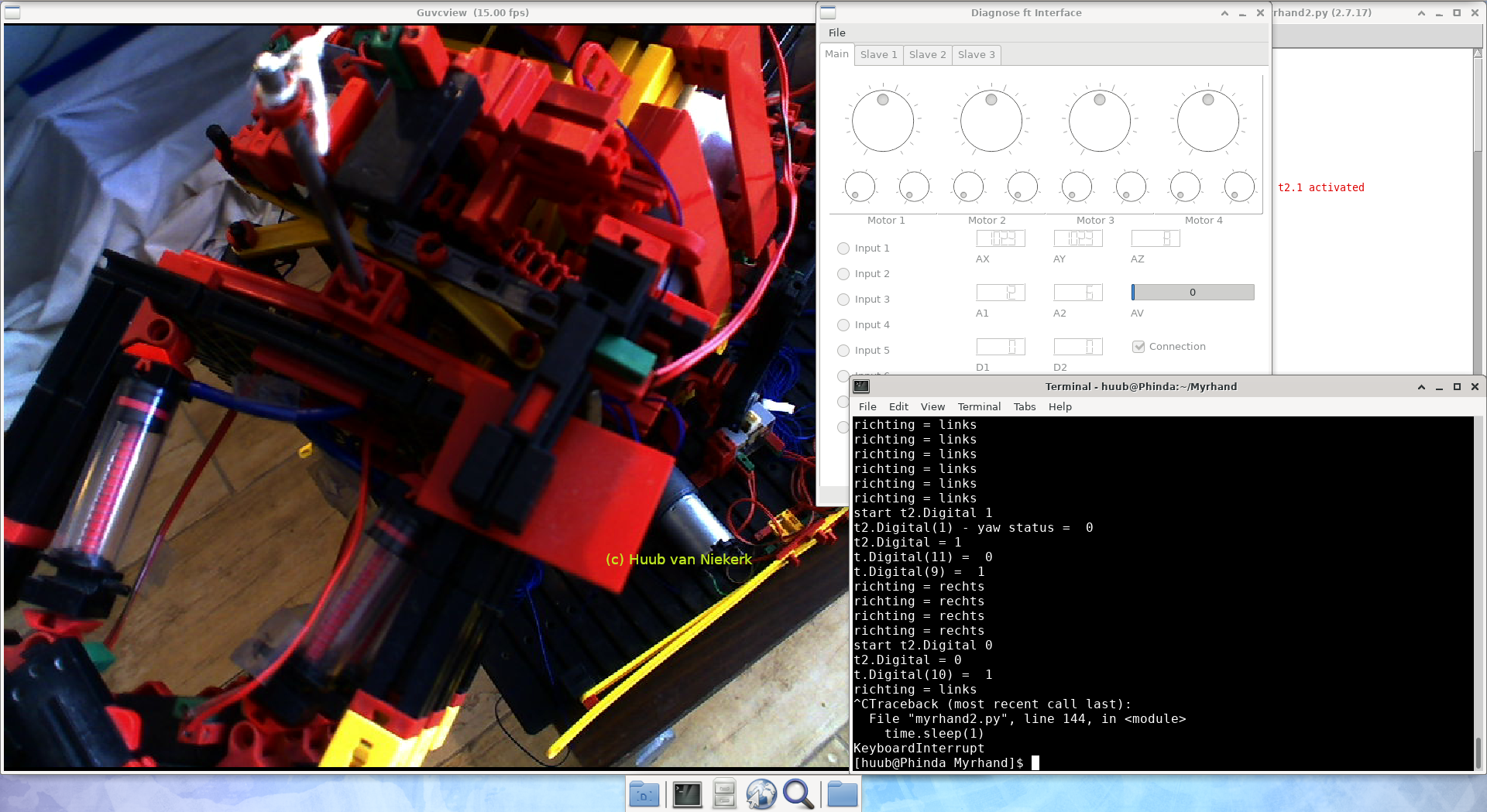
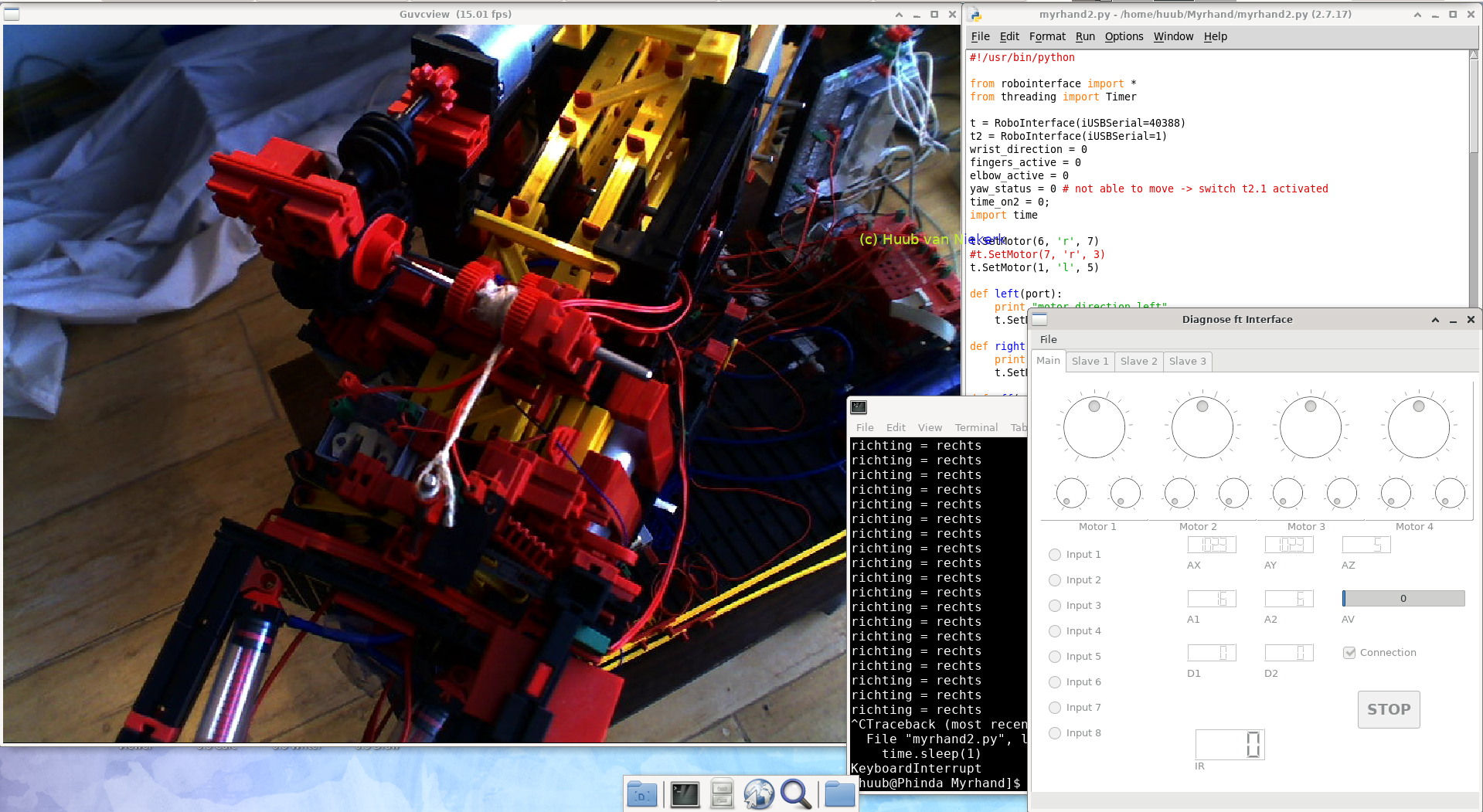
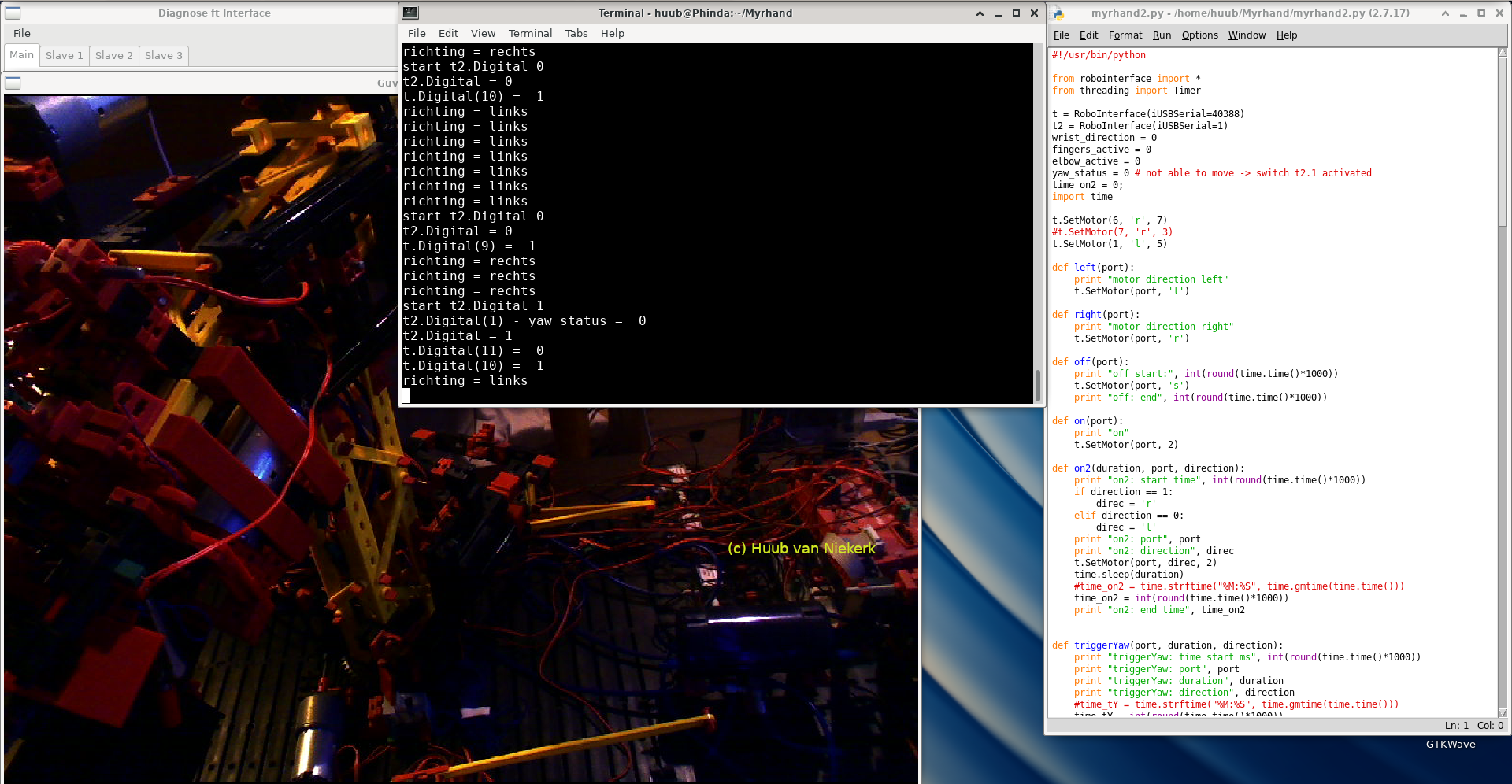
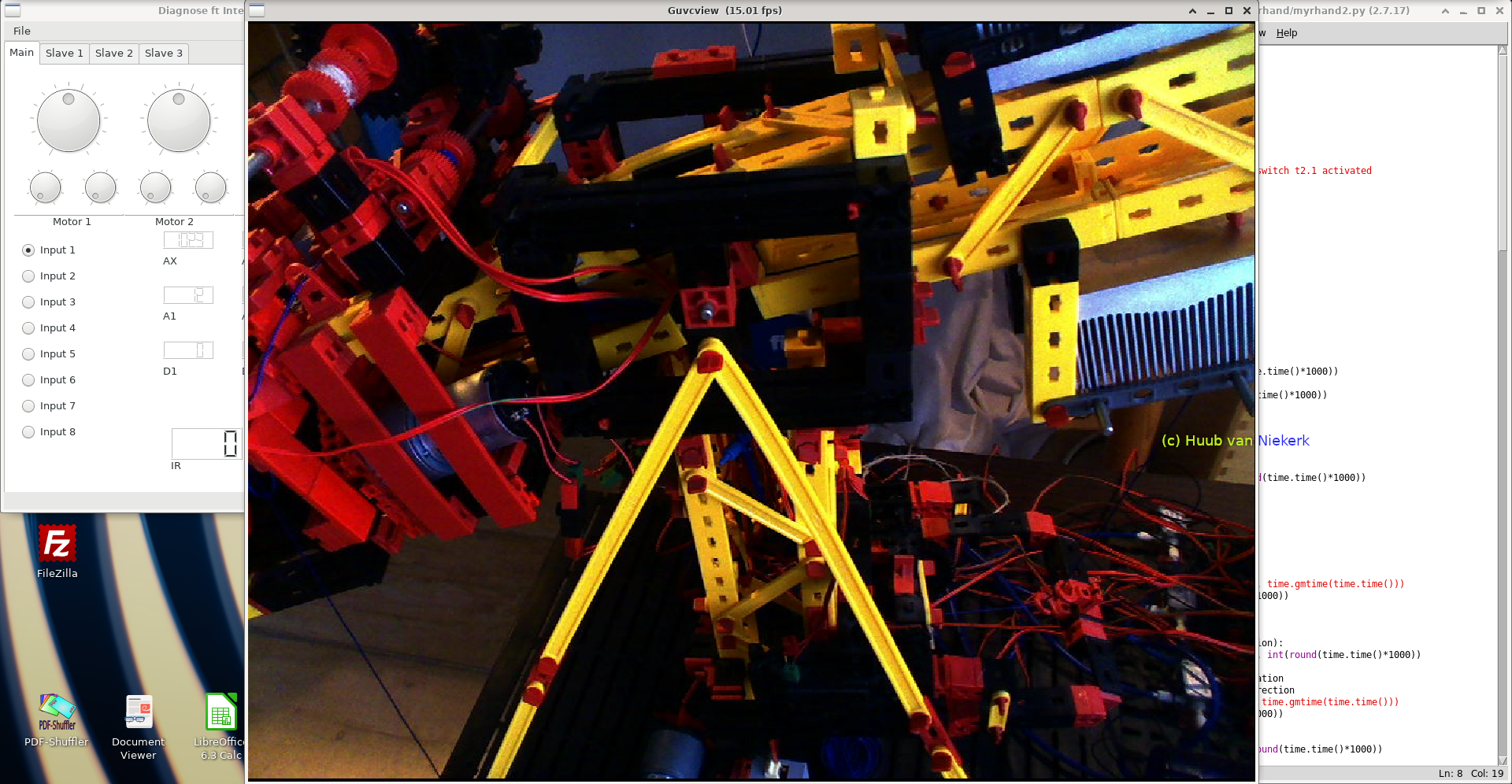
Hand: Focus is on the hand-wrist sensors. What can I do to the pitch? It works but changes direction too quickly. Code change? After that: overall testing. Click the image to watch the video.
11 December Blog 404
Hydraulics: After chacking the existing parts, a reconstruction on a piston and adding one. After that, testing ... does it make me happy? Click the image to watch the video.

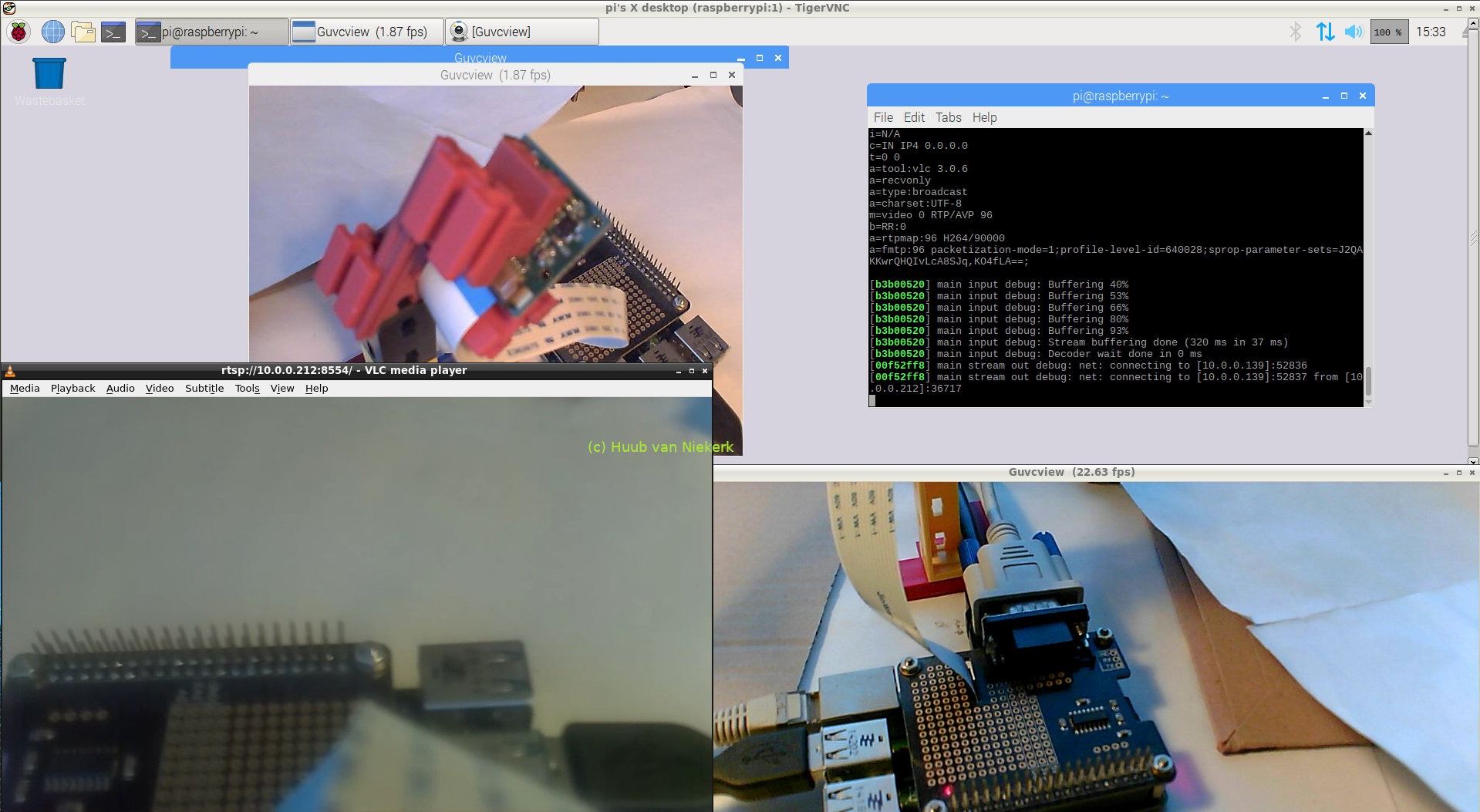
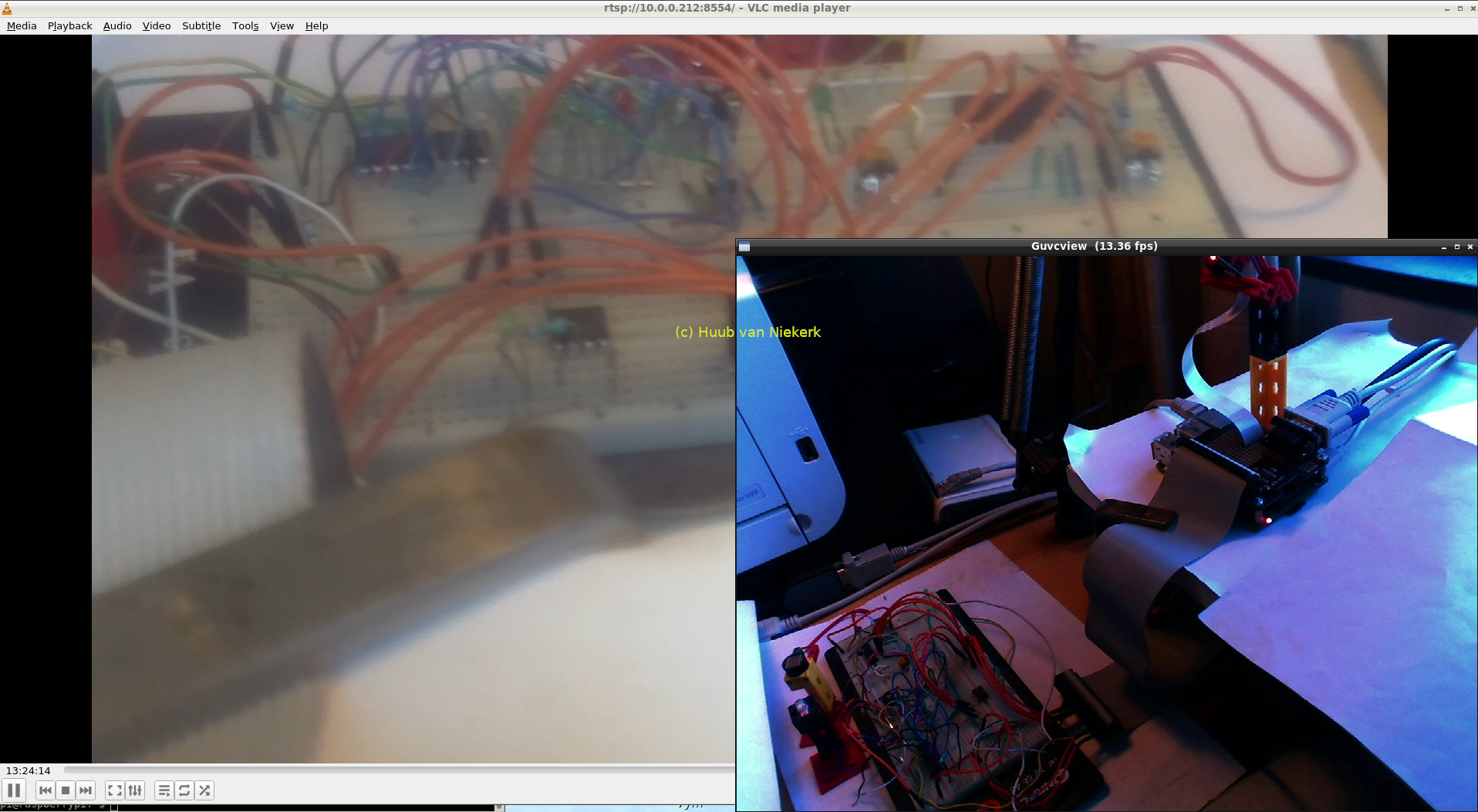
RaspberryPi1B+: Making a comparison between the raspicam and a fischertechnik camera using streaming video. Ending with an oops. Click the image to watch the video.
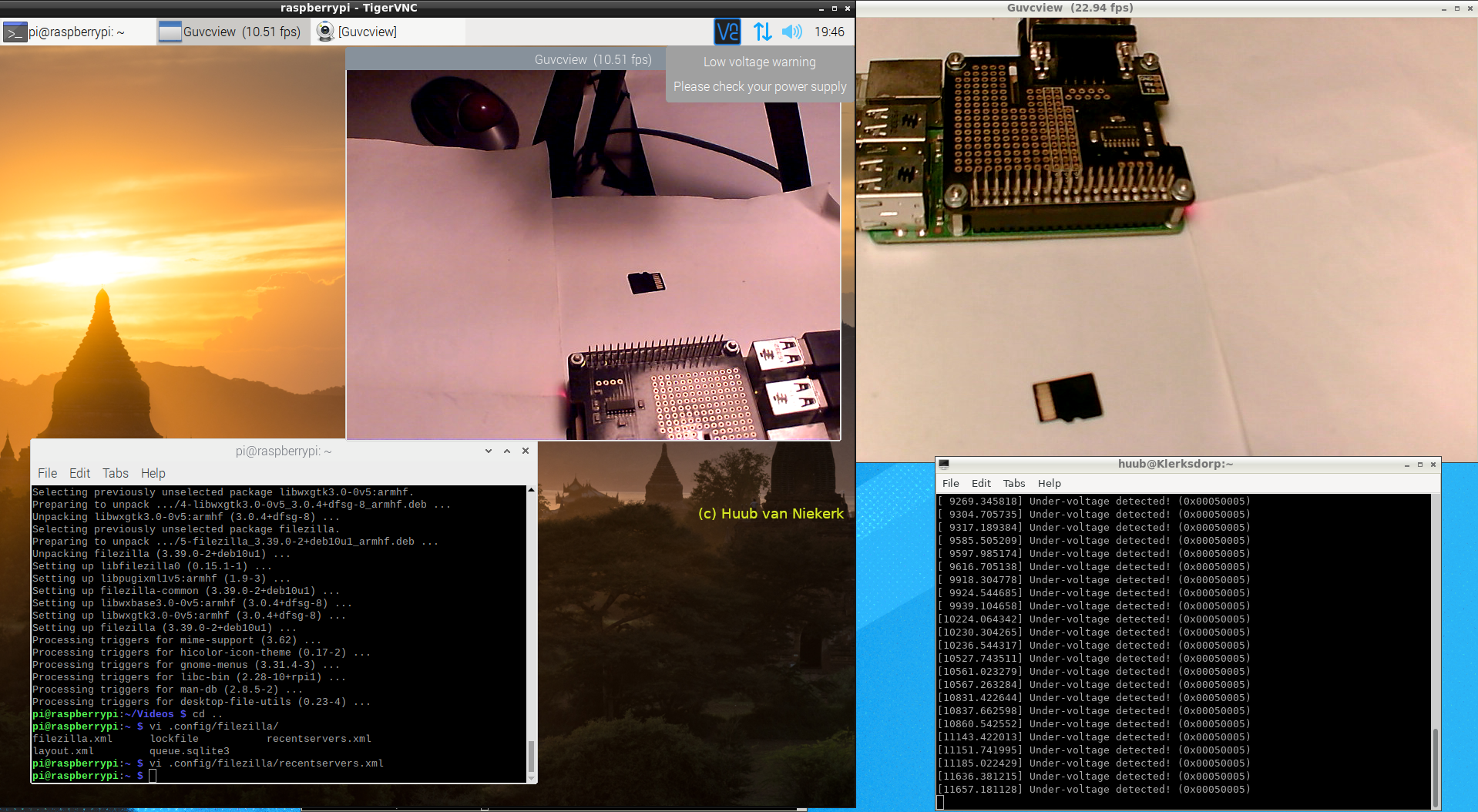
RaspberryPi2 & camera: New attempt on using a fischertechnik camera using guvcview. Click the image to watch the video.
4 December Blog 403
RaspberryPi3 & PiXtend: Focus is on the digital input and output. Trying first with just C and later with pxauto. Then there's some difference, but how come? Click the image to watch the video.
Discovery: After the results of the last 2 week, I'm curious to see what happens now. I'm in for some oopses, surprises and results. Click the image to watch the video.
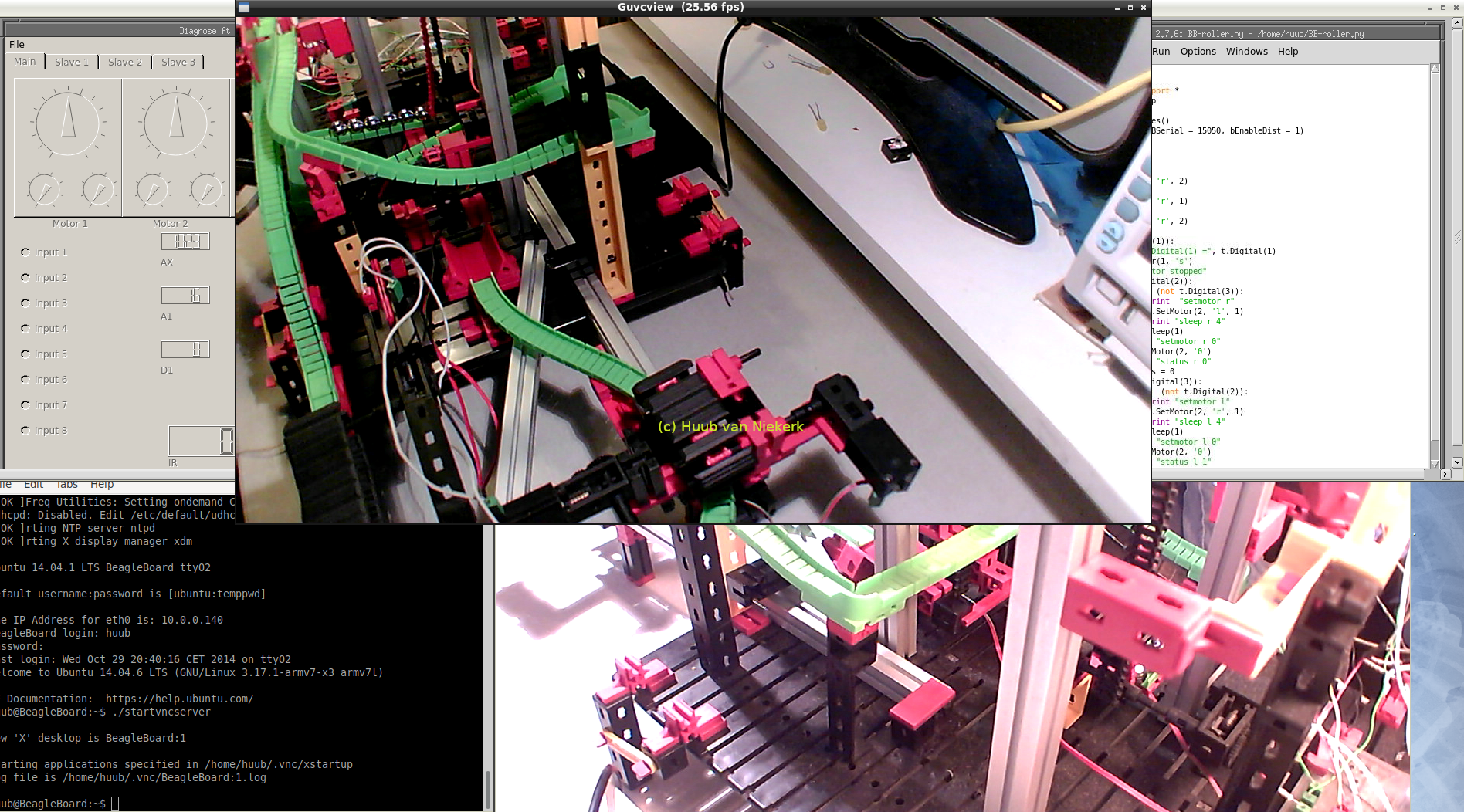
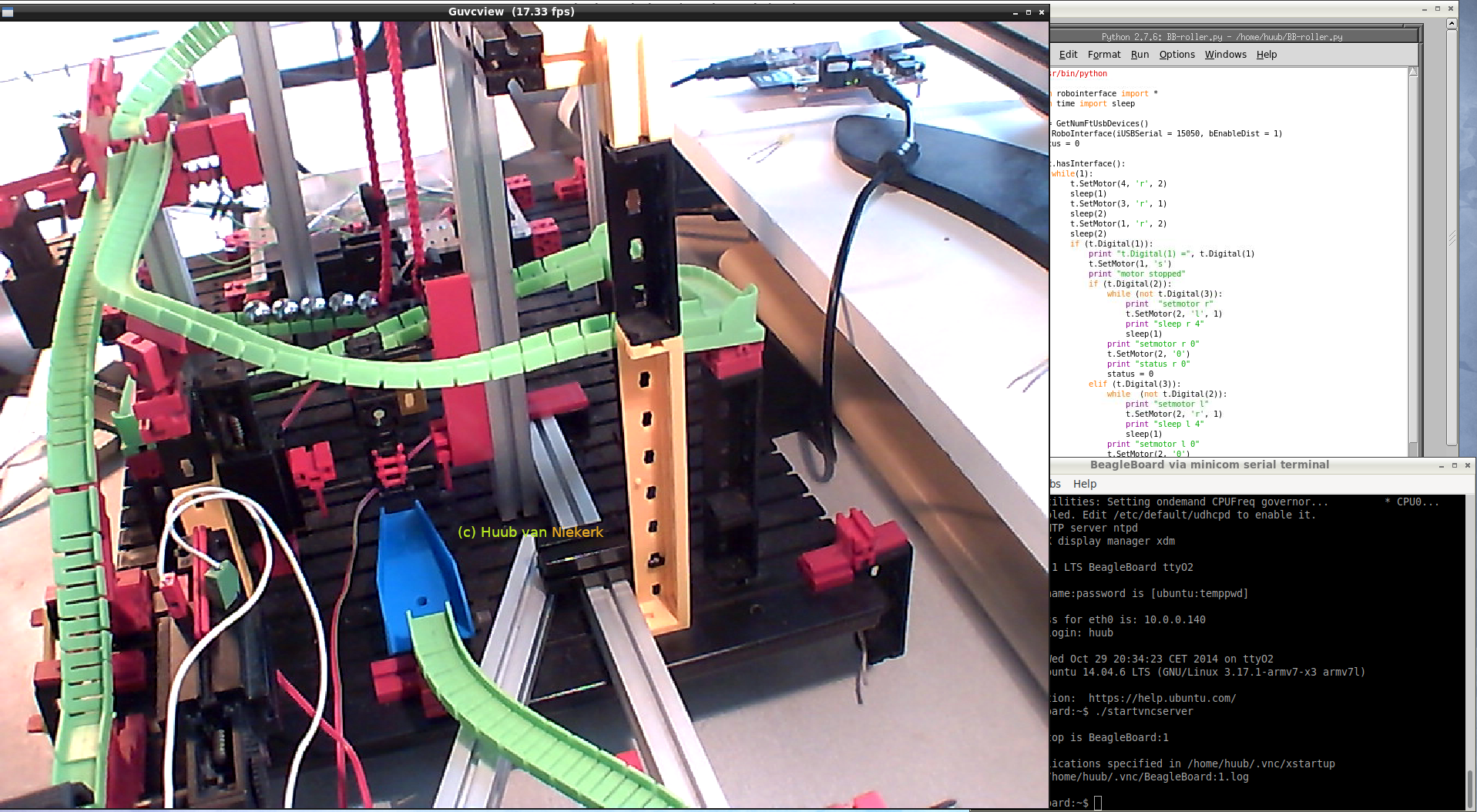
BeagleBoard & rollertrack: After reconstructing the track at the first conveyor, I need to test everything. Apart from a wiring fix and a small track fix, how does it perform? Click the image to watch the video.
27 November Blog 402
ESP32: Another attempt to get WiFi working. Analyzing brings a solution but how to do it? Click the image to watch the video.
Mirft2: Another new attempt to login to the Community firmware gives once again a surprise; some changes to the Python code and after recording another surprise (shown in the posts on Instagram and IGTV). So again: what's happening and why? Click the image to watch the video.
Hand: Focus is on the hand-wrist sensors. What can I do to the pitch? It works but changes direction too quickly. Code change? After that: overall testing. Click the image to watch the video.
20 November Blog 401
Hydraulics: Making a modification on a piston and in the code. After that, some testing and finishing with an idea. Click the image to watch the video.
RaspberryPi1B+: Trying to make a comparisong between the raspicam and a fischertechnik camera. Click the image to watch the video.
RaspberryPi2 & camera: Trying a fischertechnik camera using guvcview. Click the image to watch the video.
13 November Blog 400
RaspberryPi3 & PiXtend: Focus is on Python vs C: can I get the program to run? Using "-l" brings a solution but testing raises a new question. Click the image to watch the video.
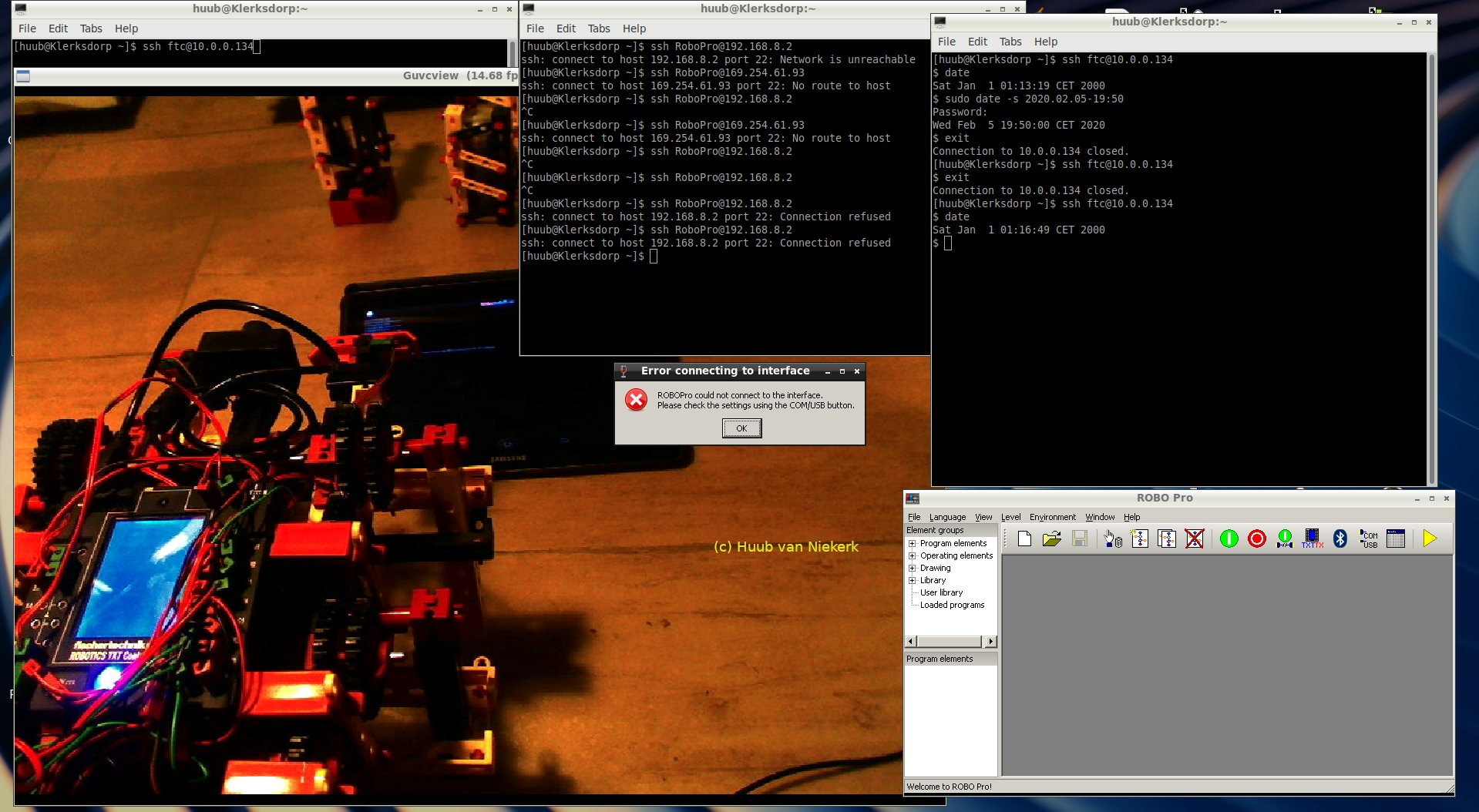
Discovery: A new attempt of accessing the community firmware with a surprise result. Click the image to watch the video.
BeagleBoard & rollertrack: The problem showing up last time: the marble drops from the track. But why? After some thinking and a wrong fix, I find the correct fix with a reconstruction. Then the next problem: the track-changing mechanism. But what's wrong exactly? Click the image to watch the video.
6 November Blog 399
ESP32: First attempt to get WiFi working. Any oopses? Click the image to watch the video.
Mirft2: A new attempt to login to the Community firmware gives a surprise, followed by another one and a big question. What's happening and why? Click the image to watch the video.
Hand: Focus is on the hand: does it work after an incident. Turns there's something with air and wiring, so I need to fix it . Click the image to watch the video.
30 October Blog 398
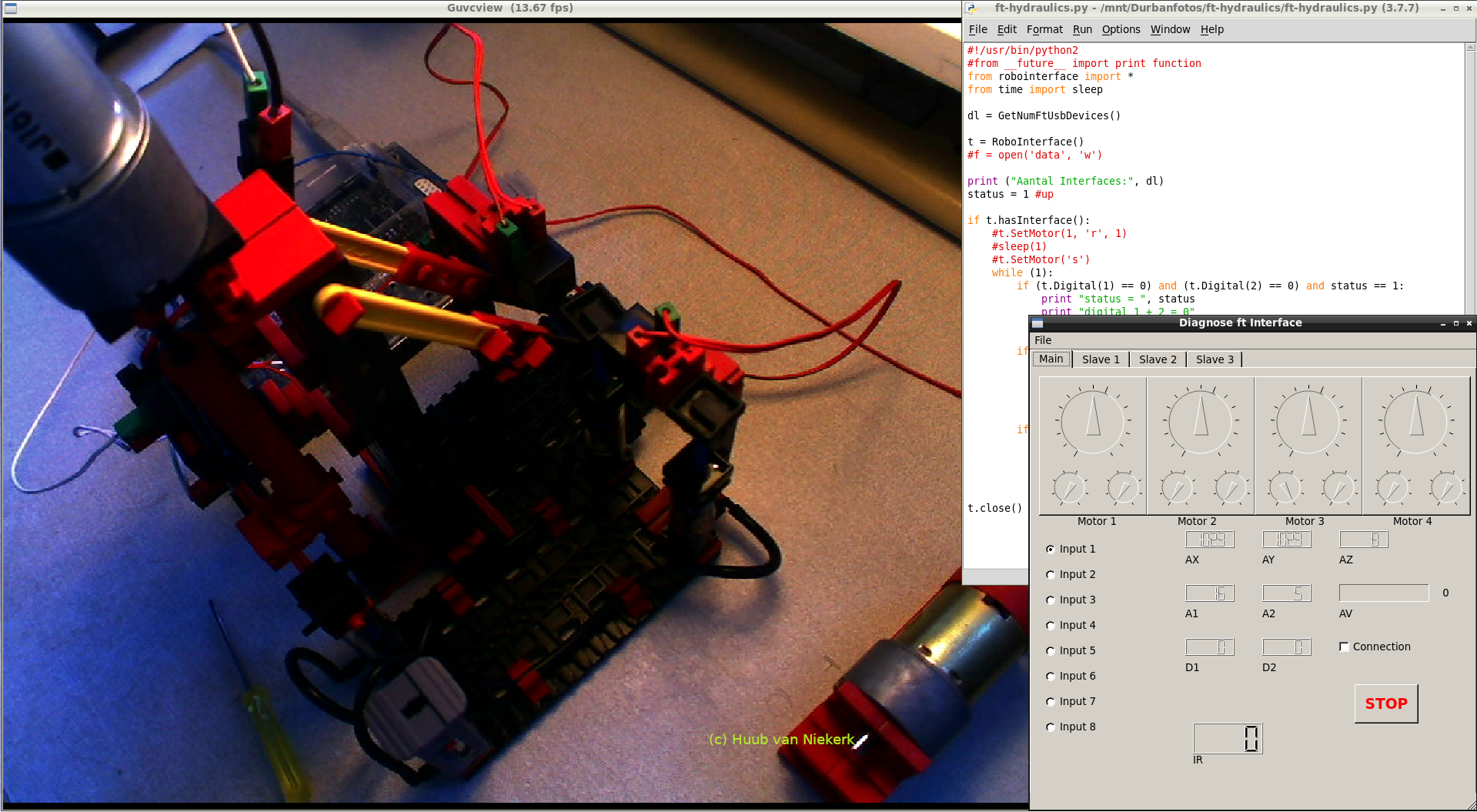
Hydraulics: Testing the system after an big upgrade: does the software work? ftdiagnose no, Python code yes. Then, trying to improve the screw pump connection to the piston and finding some issues. Click the image to watch the video.
RaspberryPi1B+: Can I use images from the raspicam with OpenCV in either Python or C/C++? Click the image to watch the video.
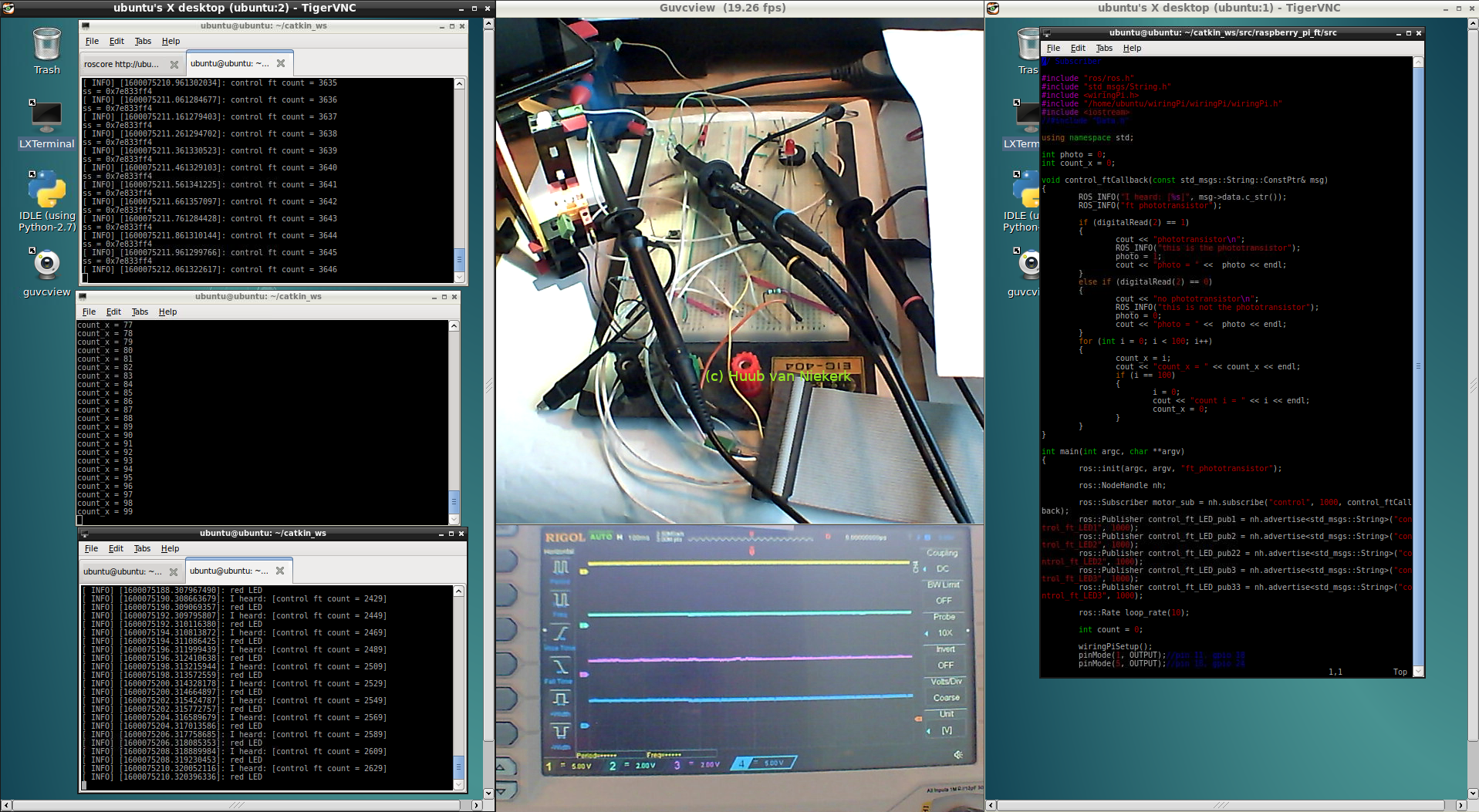
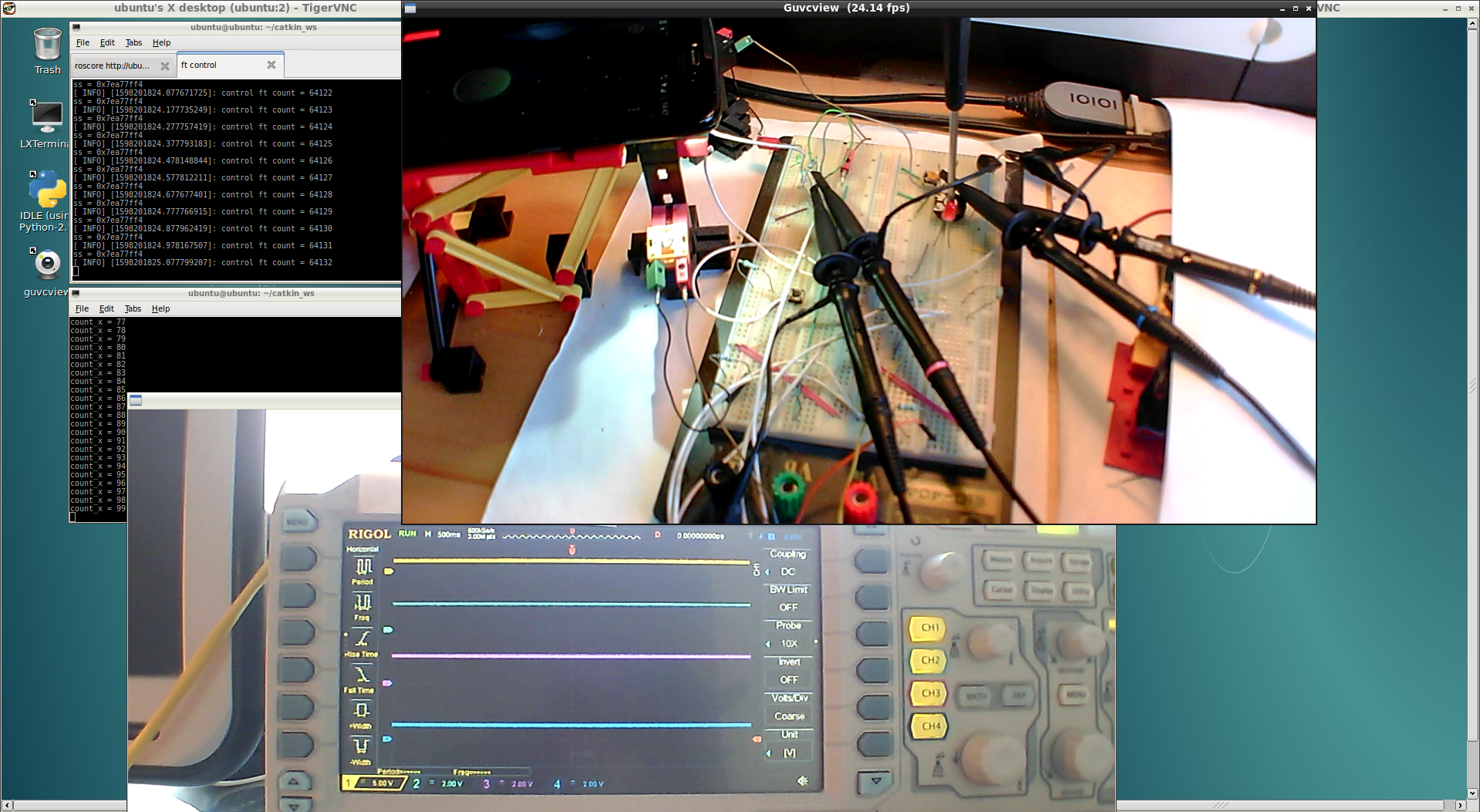
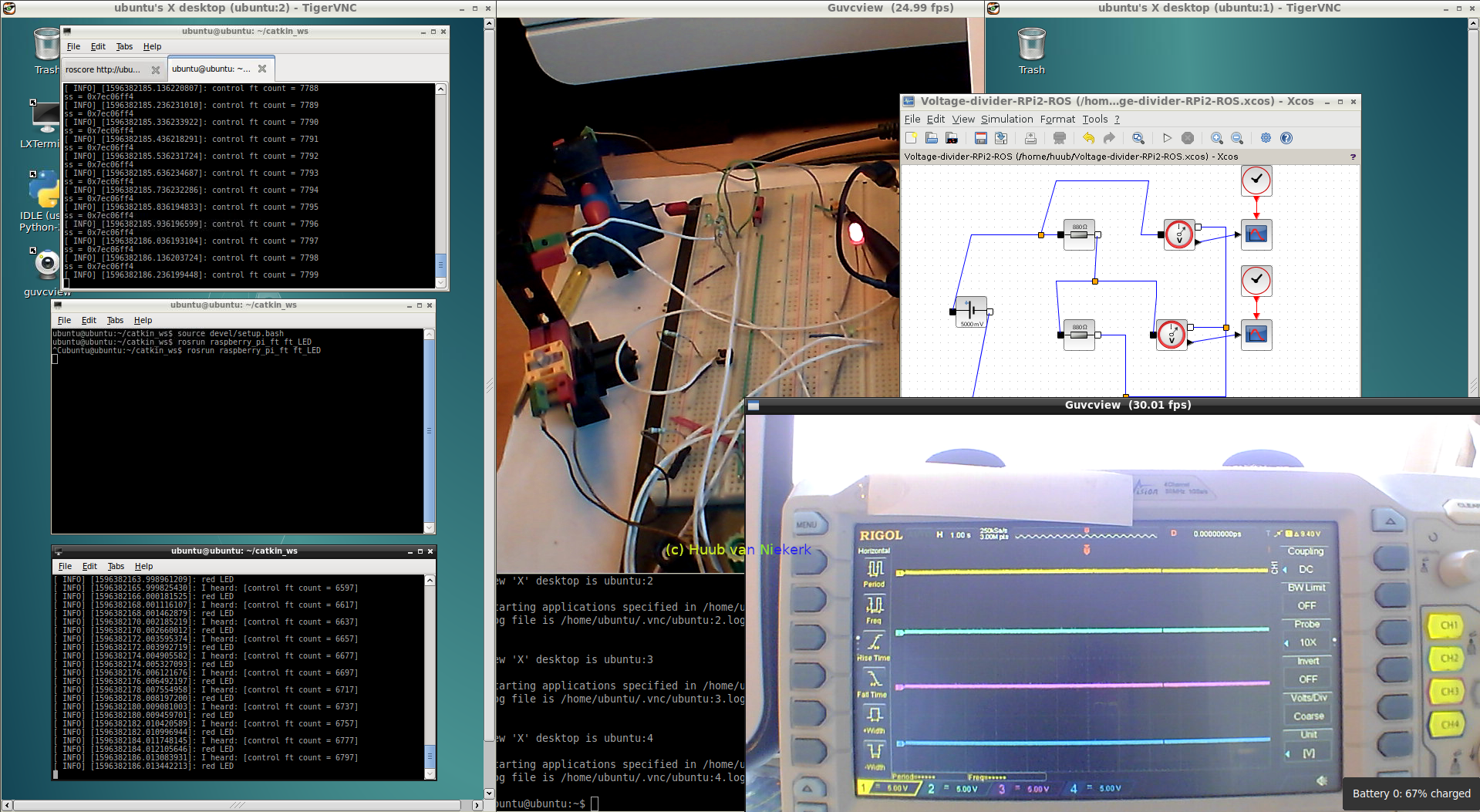
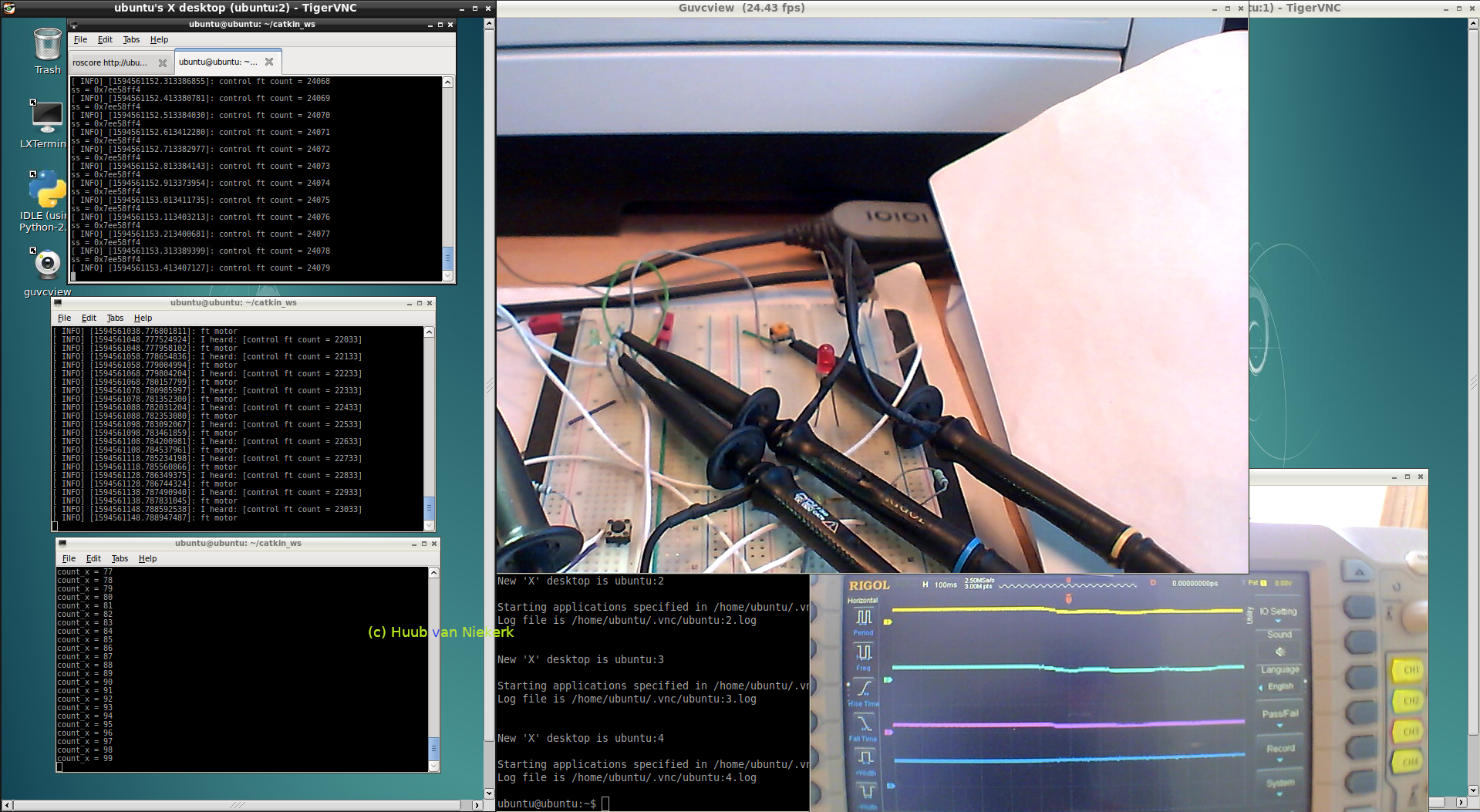
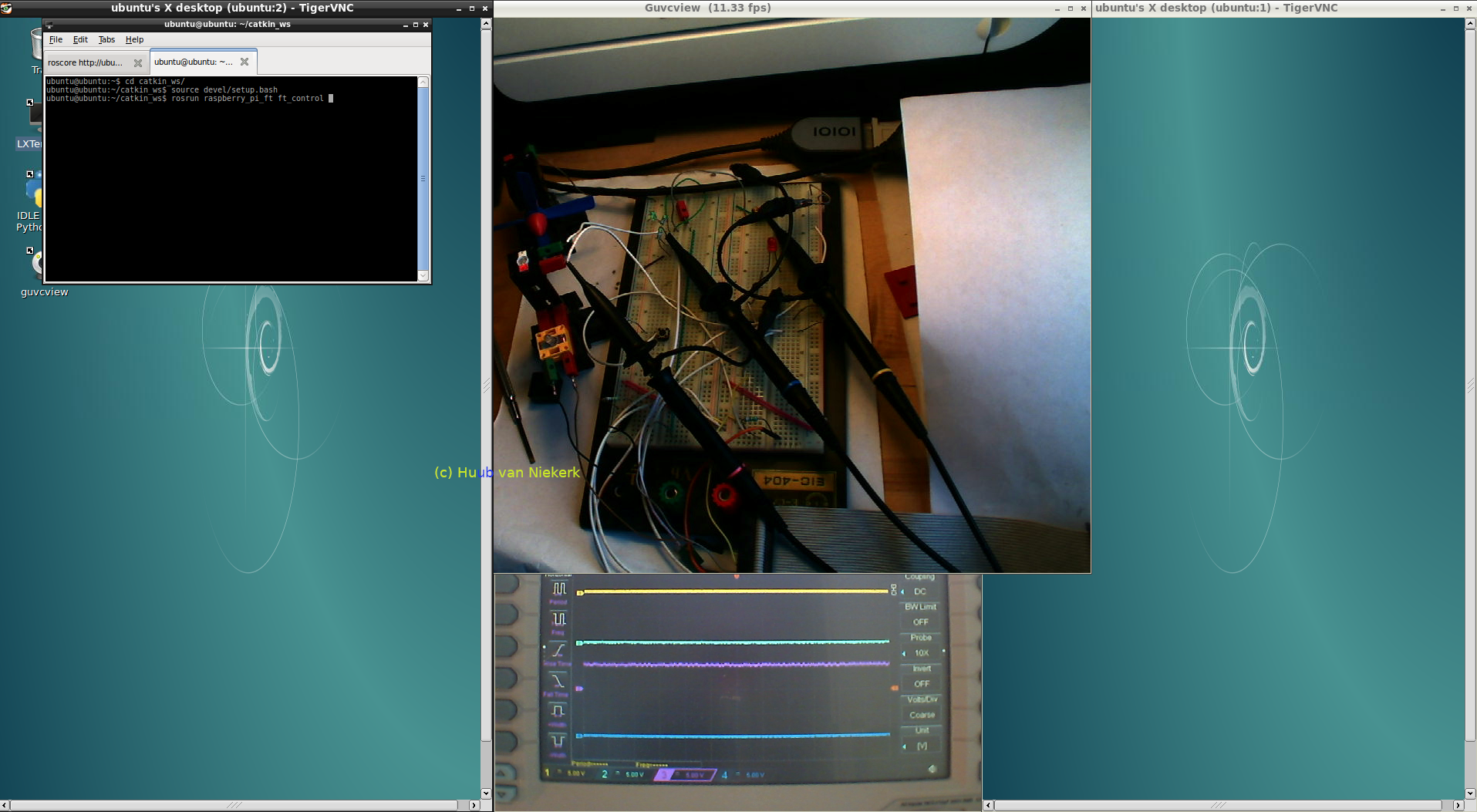
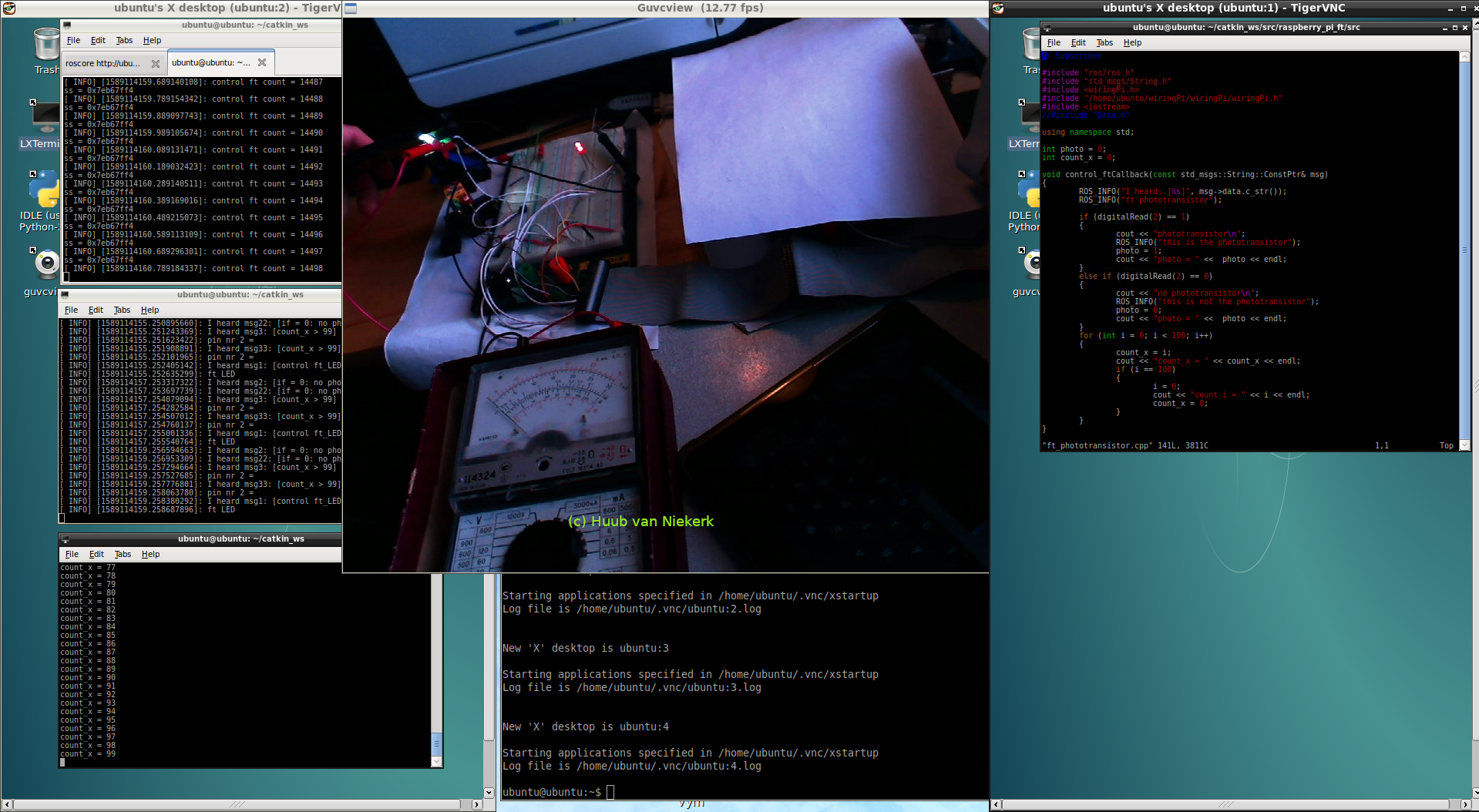
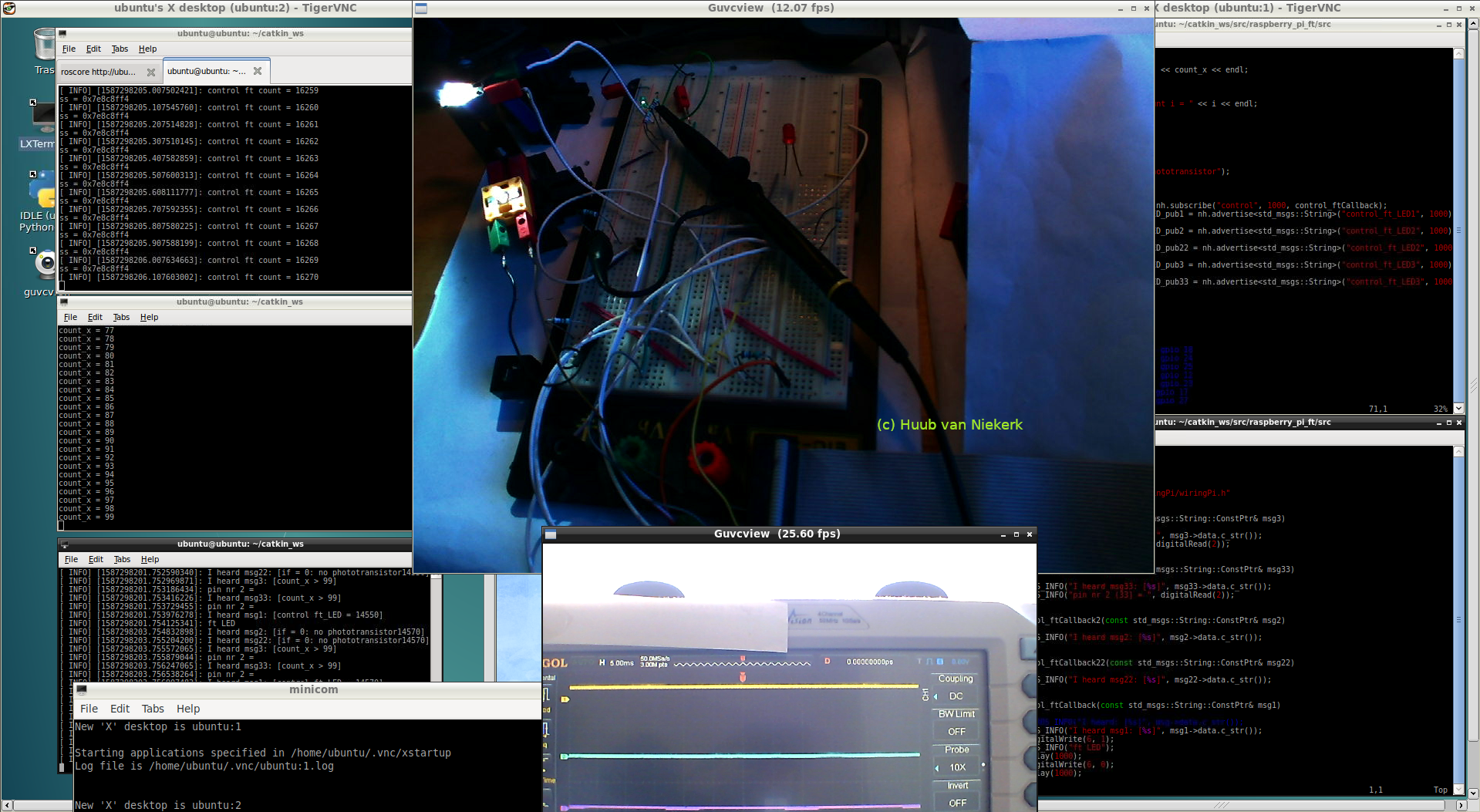
RaspberryPi2 & ROS: The focus is on measuring resistors, and using a formula in wxMaxima with a conclusion. Then a run of the nodes. What are the findings? Click the image to watch the video.
23 October Blog 397
RaspberryPi3 & PiXtend: Focus is on Python vs C: can I get the program to run? Using "-l" brings a solution but testing raises a new question. Click the image to watch the video.
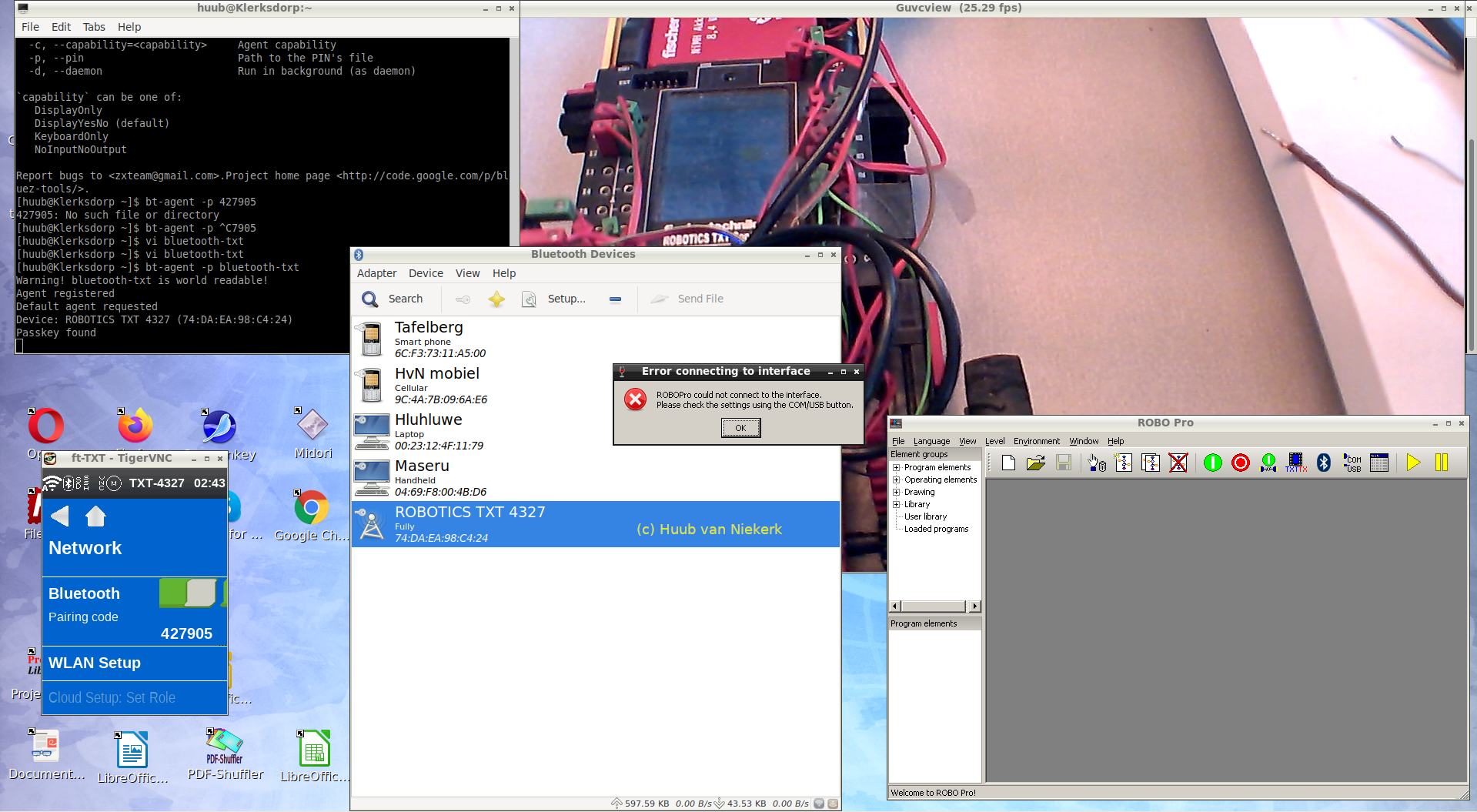
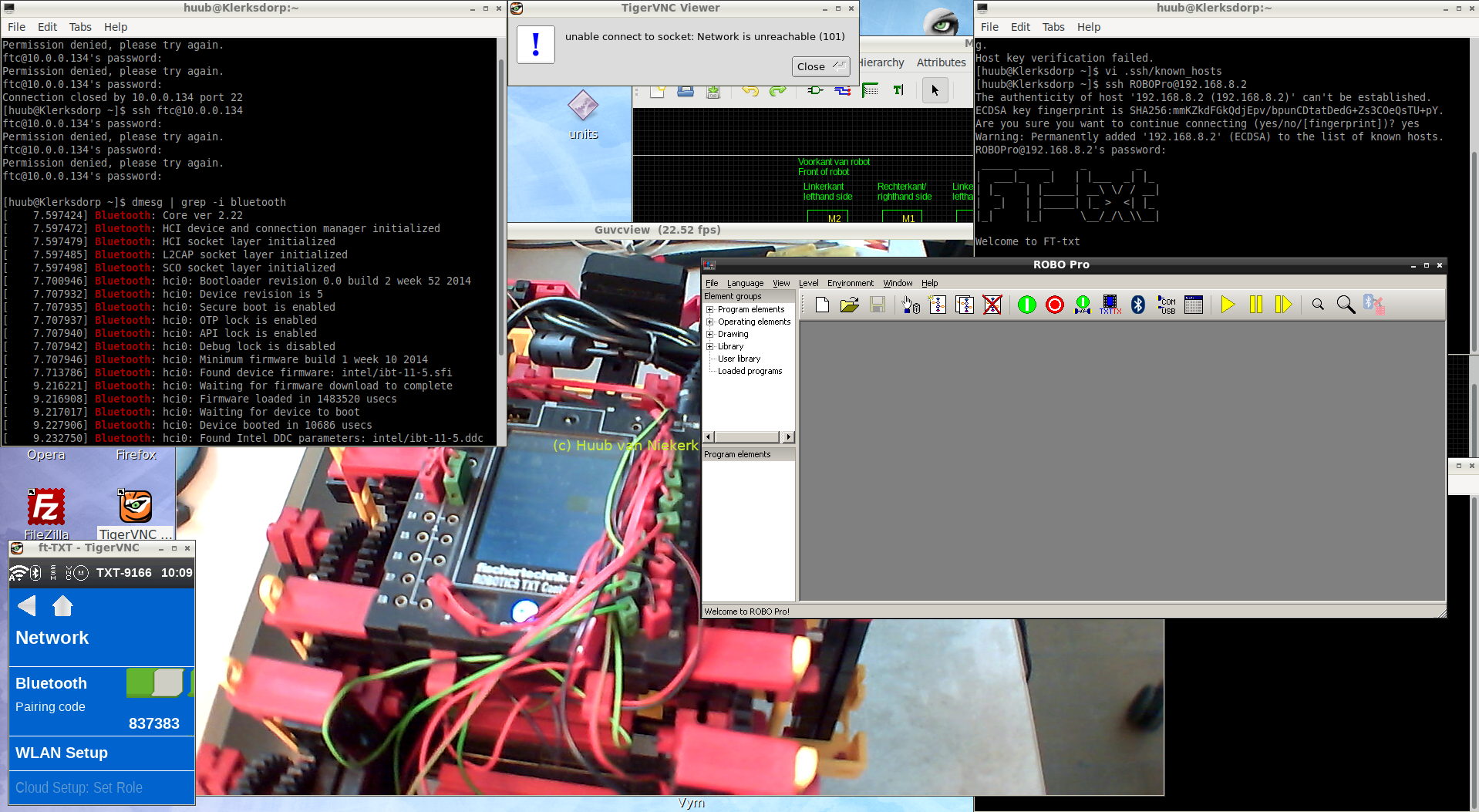
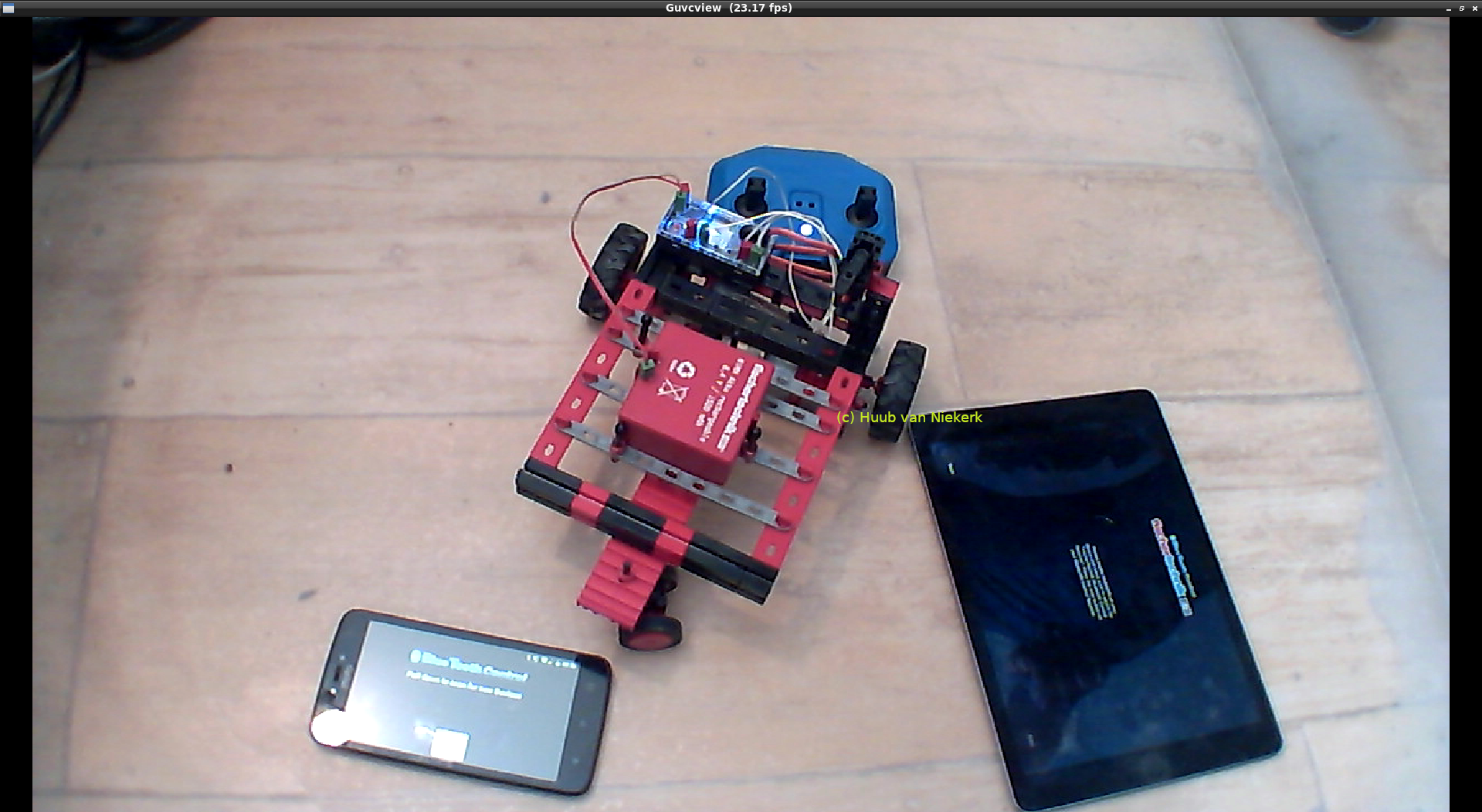
Discovery: More testing of bluetooth w/ ROBOPro. Click the image to watch the video.
BeagleBoard & rollertrack: The problem showing up last time: the marble drops from the track. But why? After some thinking and a wrong fix, I find the correct fix with a reconstruction. Then the next problem: the track-changing mechanism. But what's wrong exactly? Click the image to watch the video.
16 October Blog 396
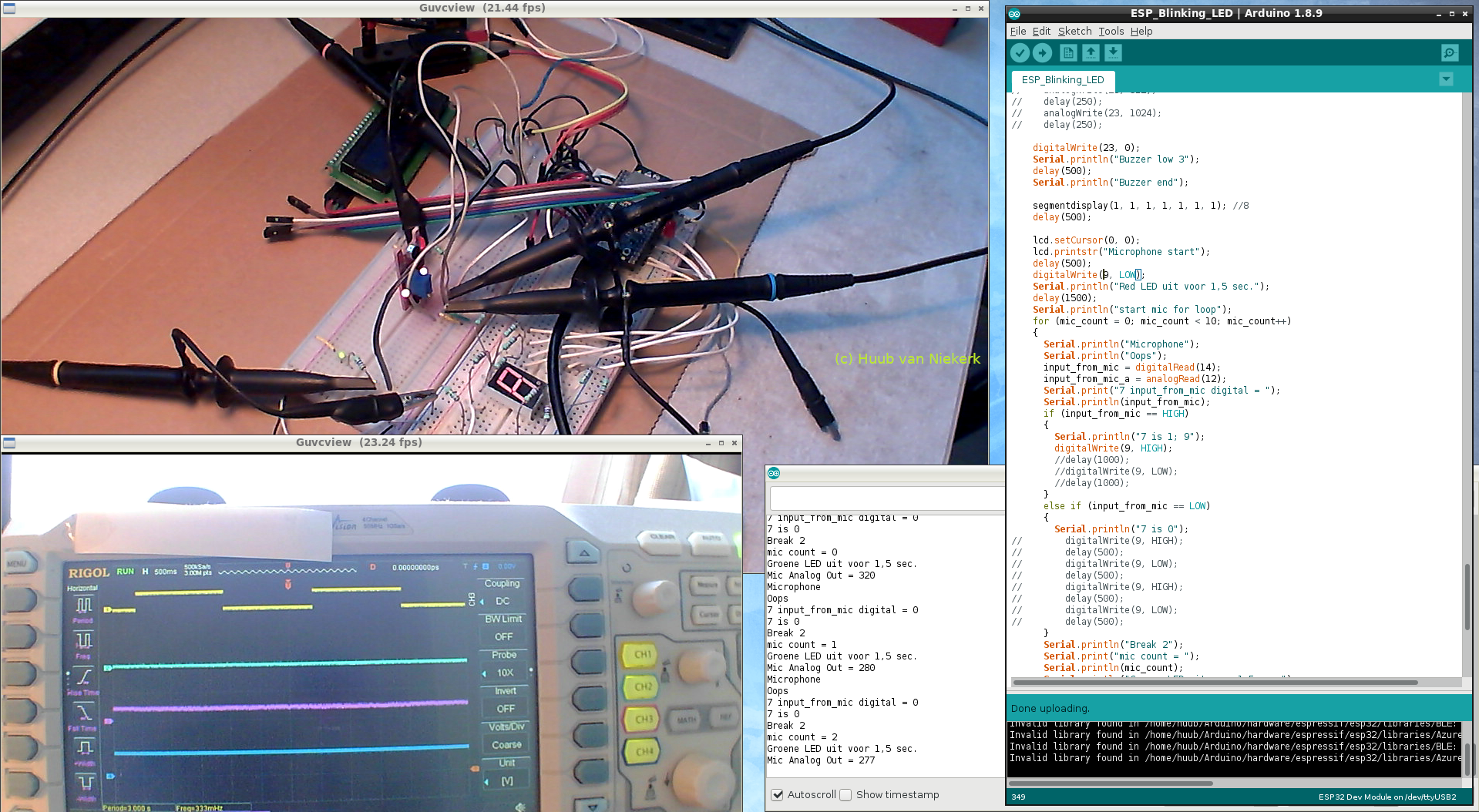
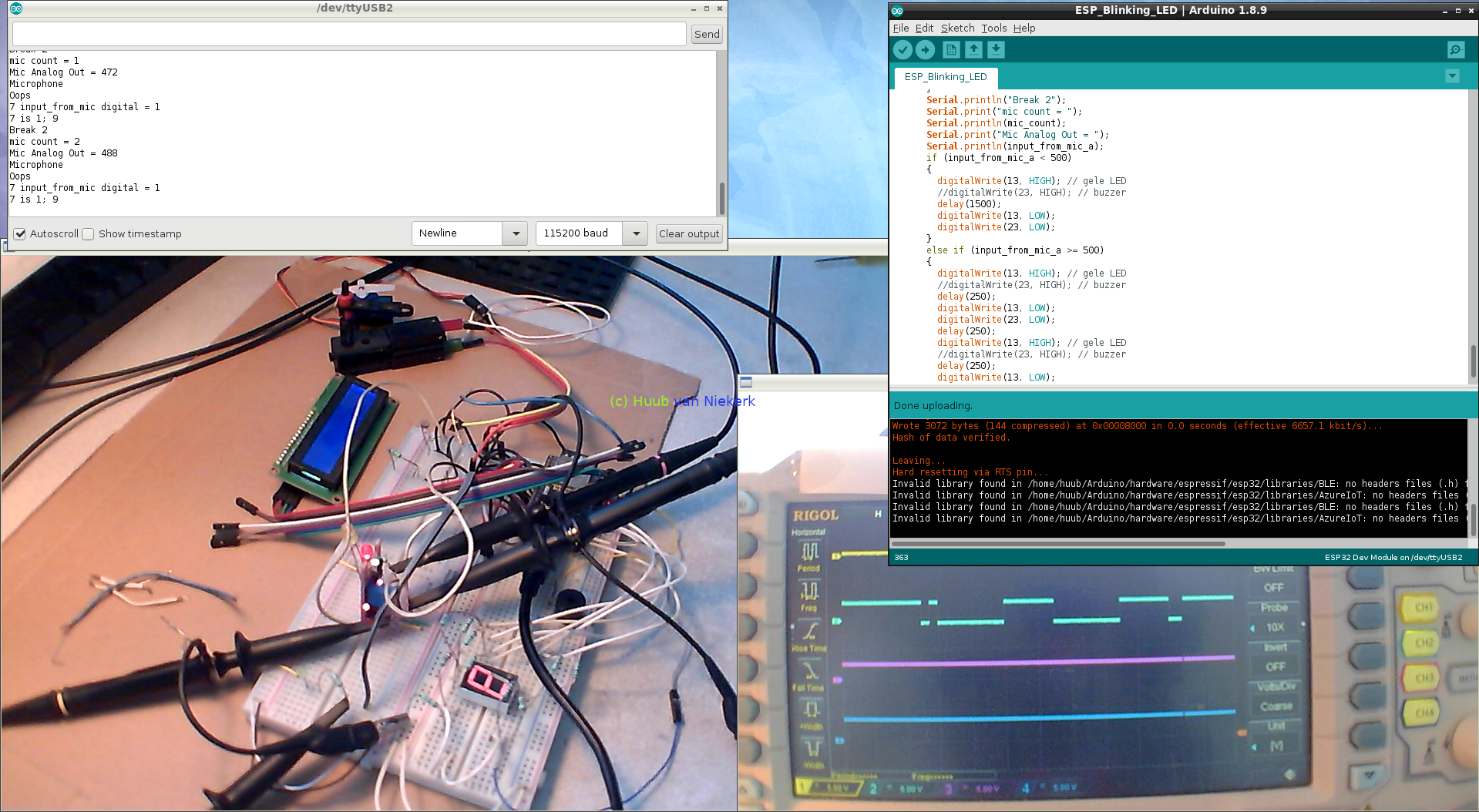
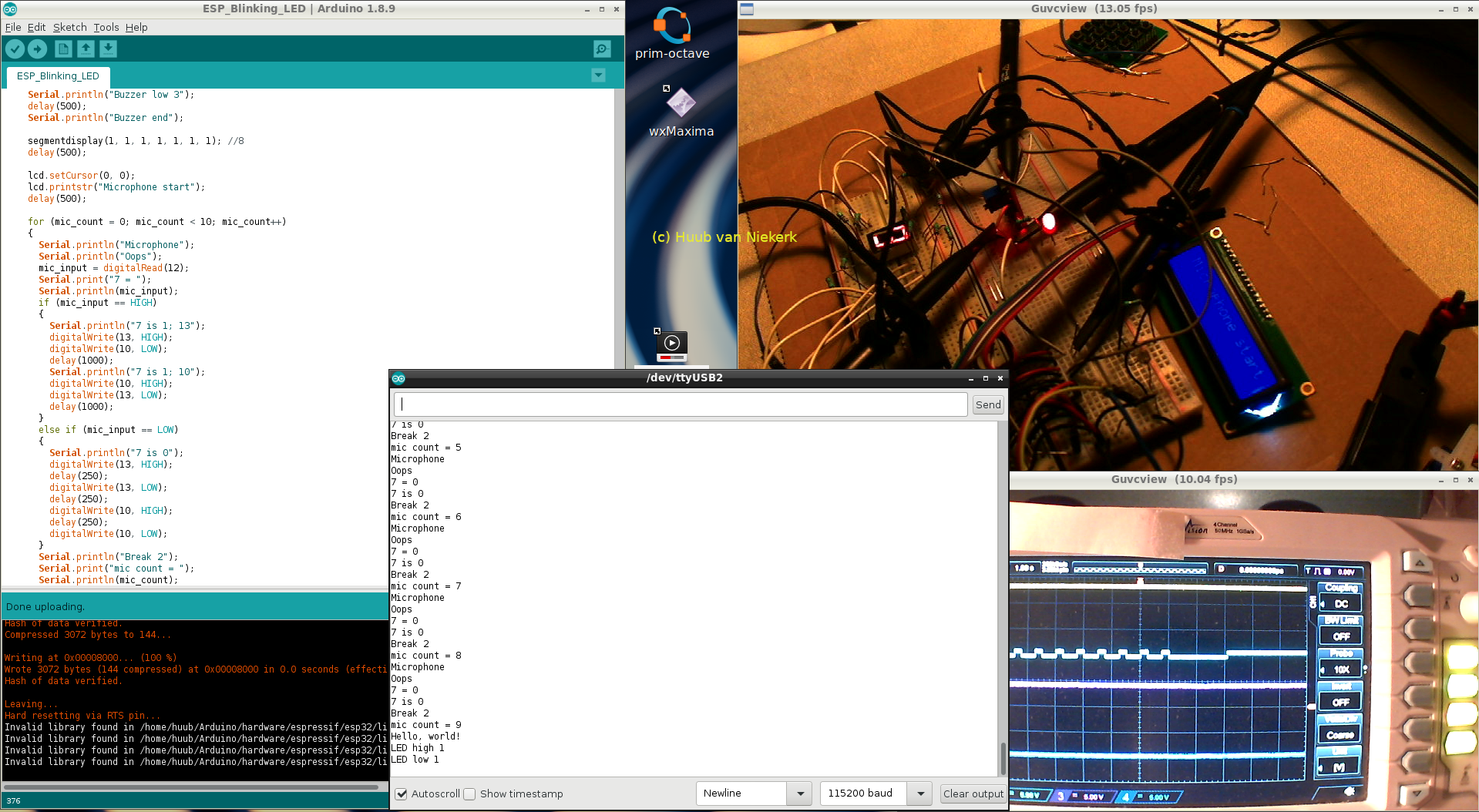
ESP32: Final focus on the microphone: what works, what doesn't? Some attention to the motors ending in an oops (fixed after recording...) Click the image to watch the video.
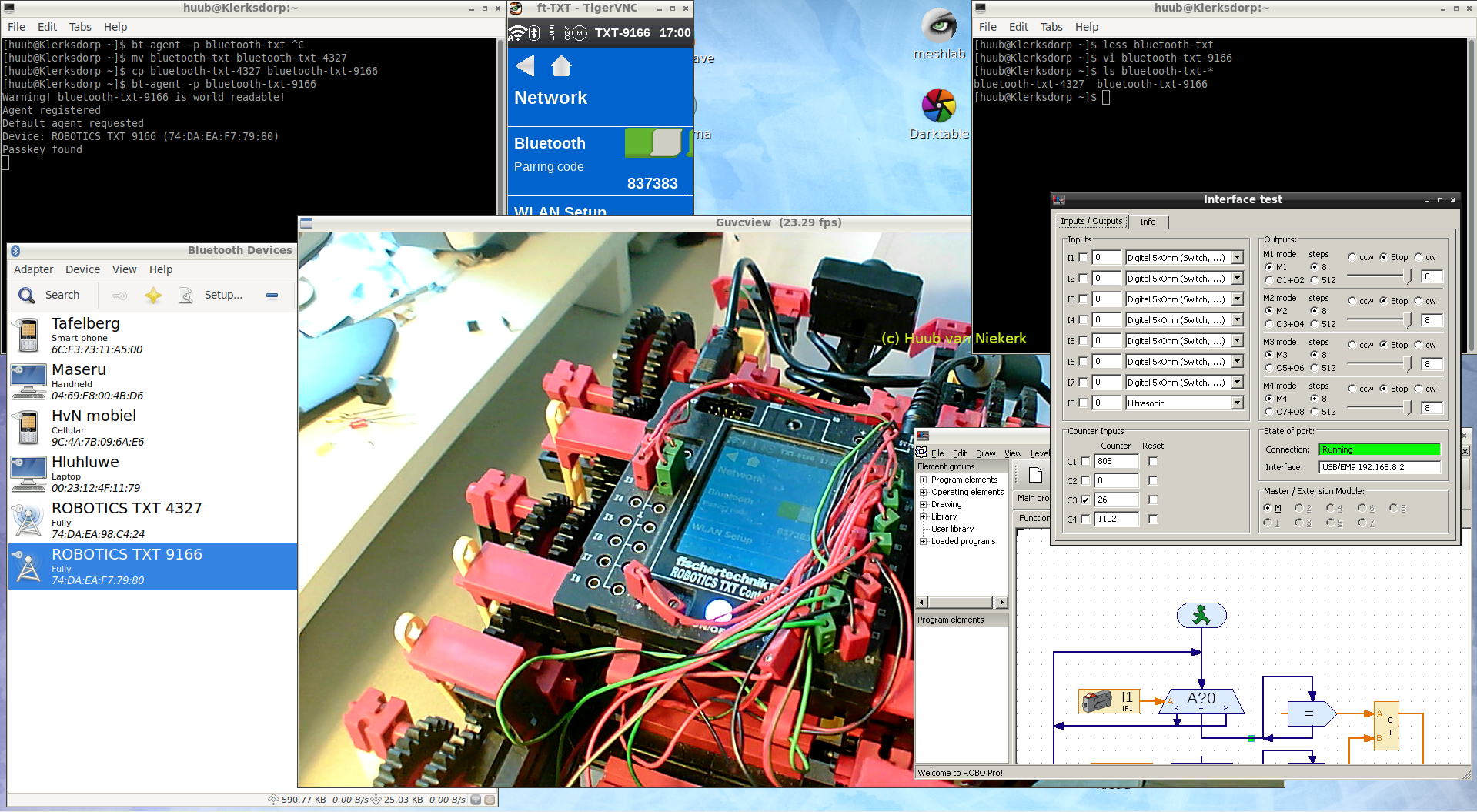
Bluetooth: Now that I've connected to the TXT's, can I also use Linux to connect to the Bluetooth set? Can it work? Click the image to watch the video.
Hand: Focus is on the 2nd hand-wrist sensor. It works, kind of. But that's not good enough. Reconstruction is needed. After that: more testing. Click the image to watch the video.
9 October Blog 395
Hydraulics: The water maintenance for the manually controlled part isn't ok. So after a case of RTFM, I fill it properly. And it seems to work. Then the automated part... Which raises the question: where does the water go? What's the cause and how to solve it? Click the image to watch the video.
Mirft2: Focus is on Bluetooth but how can I make this to work next to Discovery? An how about ROBOPro? or iPad? or Android? Click the image to watch the video.
RaspberryPi2 & ROS: The focus is on measuring voltages, but turn to the Scilab simulation and a formula in Maxima.Then a test on the oscilloscope. What are the findings? Click the image to watch the video.
2 October Blog 394
RaspberryPi3 & PiXtend: Focus is on Python vs C: can I get the program to run? Using "-l" brings a solution but testing raises a new question. Click the image to watch the video.
Arduino Mega2560: Using 3 different Arduino's, 3 computers and 3 cameras, I need the fix a problem, but what's the cause? Measuring should give an answer, but relocation adds a mystery. Click the image to watch the video.
BeagleBoard & rollertrack: The problem showing up last time: the marble drops from the track. But why? After some thinking and a wrong fix, I find the correct fix with a reconstruction. Then the next problem: the track-changing mechanism. But what's wrong exactly? Click the image to watch the video.
25 September Blog 393
Hydraulics: The water maintenance for the manually controlled part isn't ok. So after a case of RTFM, I fill it properly. And it seems to work. Then the automated part... Which raises the question: where does the water go? What's the cause and how to solve it? Click the image to watch the video.
Discovery: Testing once again: login on both firmwares. What does work? Click the image to watch the video.
Hand: After adding a sensor to the hand, it shows there's a problem. But what's the cause? Some analysis is in order. Click the image to watch the video.
18 September Blog 392
ESP32: Focus again on the microphone: more analysis, another algorithm change in (AVR) C, LED checks. What helps, what doesn't? Click the image to watch the video.
Mirft2: Further attempts to login to both firmwares and a 'new' connection (oops). Click the image to watch the video.
RaspberryPi2 & ROS: First, I need a reconstruction for the smartphone scaffold. Then, the focus is on a continuation with Scilab simulation and a physical potmeter test on the oscilloscope. What are the results? Click the image to watch the video.
11 September Blog 391
RaspberryPi3 & PiXtend: Focus is on Python vs C: can I get the program to run? Using "-l" brings a solution but testing raises a new question. Click the image to watch the video.
Arduino Mega2560: Using 3 different Arduino's, 3 computers and 3 cameras, I need the fix a problem, but what's the cause? Measuring should give an answer, but relocation adds a mystery. Click the image to watch the video.
BeagleBoard & rollertrack: The problem showing up last time: the marble drops from the track. But why? After some thinking and a wrong fix, I find the correct fix with a reconstruction. Then the next problem: the track-changing mechanism. But what's wrong exactly? Click the image to watch the video.
4 September Blog 390
Hydraulics: After replacement of the pivot: will it work (better)? Then, testing the rest and finding a response problem with the automation. What's the cause and how to solve it? Click the image to watch the video.
Discovery: Testing once again: login on both firmwares. What does work? Click the image to watch the video.
Hand: Adding a sensor to the hand an wrist takes another reconstruction. and wiring. Does it work? Click the image to watch the video.
28 August Blog 389
ESP32: Focus again on the microphone: analysis, algorithm change in (AVR) C, some wiring issues. Any solution? Click the image to watch the video.
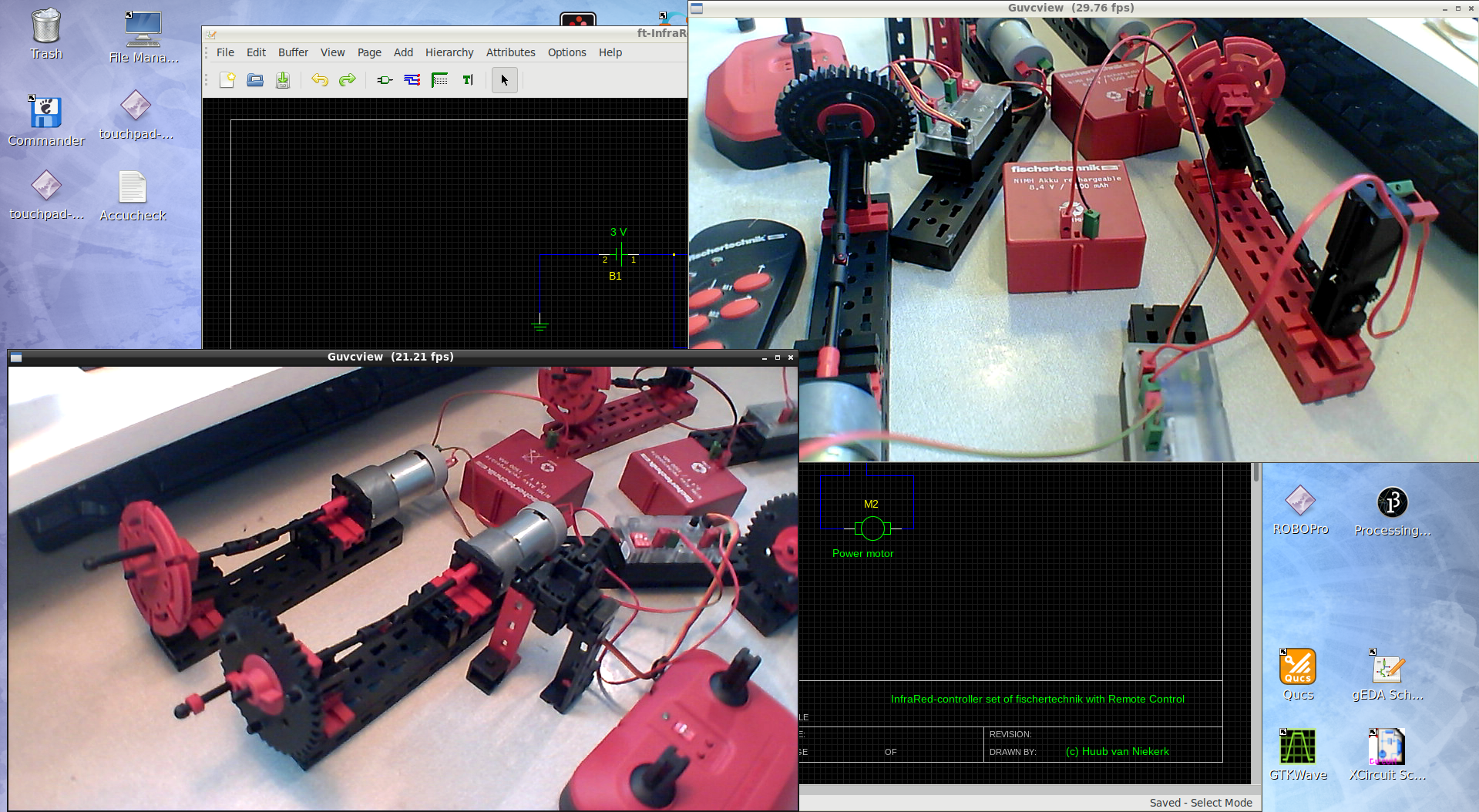
InfraRed: Using both the joystick and remote control versions, adding a motor and changing one. What are the results? How will the duration test go this time? A new side effect appears. Click the image to watch the video.
RaspberryPi2 & ROS: Focus on a continuation with Scilab simulation and a physical potmeter test on the oscilloscope. But first some questions regarding Linux & ROS. Click the image to watch the video.
21 August Blog 388
RaspberryPi3 & PiXtend: Focus is on Python vs C: can I get the program to run? Using "-l" brings a solution but testing raises a new question. Click the image to watch the video.
Mirft2: New attempts to login to both firmwares. Click the image to watch the video.
BeagleBoard & rollertrack: The small magnet-chain gets a reconstruction and another problem shows up.. Sigh. Click the image to watch the video.
14 August Blog 387
Hydraulics: After replacement of the pivot: will it work (better)? Then, testing the rest and finding a response problem with the automation. What's the cause and how to solve it? Click the image to watch the video.
Arduino Mega2560: Using 3 Arduino's, 3 computers and 3 cameras, can I improve anything with the boards? Also, checking replacement LEDs for wiring. Click the image to watch the video.
Hand: Testing after reconstruction: what works. Finding some oddities during analysis. What to do best? Click the image to watch the video.
7 August Blog 386
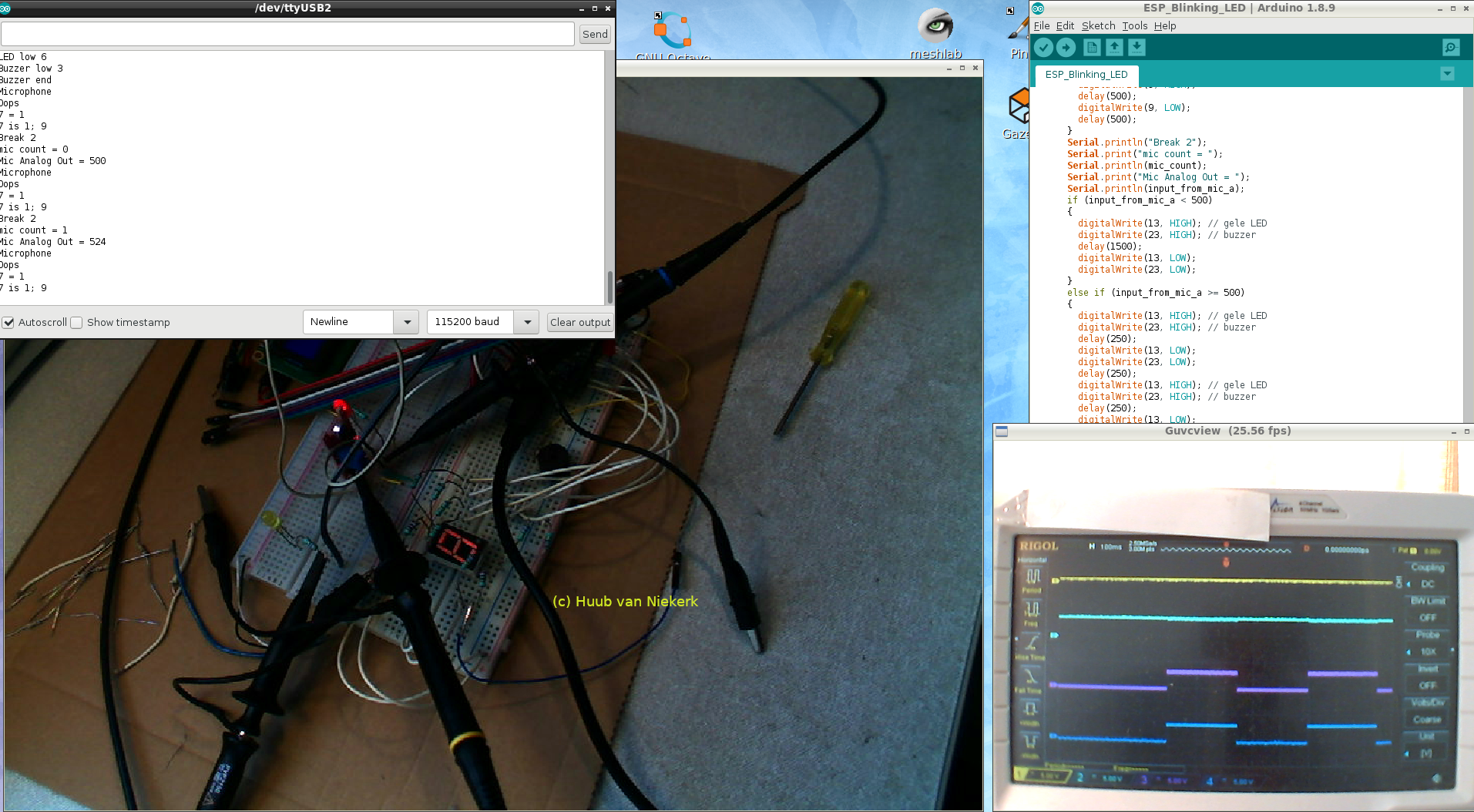
ESP32: Focus again on the microphone: analysis of the oscilloscope, algorithm change in (AVR) C, what is it? Click the image to watch the video.
InfraRed: Using both the joystick and remote control versions, adding a motor and changing one. What are the results? How will the duration test go this time? A new side effect appears. Click the image to watch the video.
Bluetooth: Using a bluetooth app from fischertechnik, something doesn't work properly. On the floor: something odd with a wheel and the wiring. Click the image to watch the video.
RaspberryPi2 & ROS: Focus on a continuation with Scilab simulation and a physical potmeter test on the oscilloscope. But first some questions regarding Linux & ROS. Click the image to watch the video.
31 July Blog 385
RaspberryPi3 & PiXtend: Focus is on Python vs C: can I get the program to run? Using "-l" brings a solution but testing raises a new question. Click the image to watch the video.
Discovery: With last time's success: will it work again? Or will Murphy's Law apply? Click the image to watch the video.
BeagleBoard & rollertrack: The small magnet-chain keeps having problems, so it needs a reconstruction. Apart from that, a stabilzation can be applied. Click the image to watch the video.
24 July Blog 384
Hydraulics: After replacement of the pivot: will it work (better)? Then, testing the rest and finding a response problem with the automation. What's the cause and how to solve it? Click the image to watch the video.
Mirft2: When continuing on last times' results, I run into Murphy's Law. How to get on? Click the image to watch the video.
Hand: Continuing the wrist-motor reconstruction, and testing the new library version. Will it work this time? Click the image to watch the video.
17 July Blog 383
ESP32: Focus again on the microphone: analysis of the oscilloscope, algorithm change in (AVR) C, what is it? Click the image to watch the video.
Arduino Mega2560: Using 3 Arduino's, 3 computers and 3 cameras, can I show more and improve the communication between the boards? Also, replacing the fischertechnik LED en lamp by ordinary ones. But what's the result? Click the image to watch the video.
Bluetooth: Reconstruction of hindwheel and using a bluetooth app from fischertechnik. Click the image to watch the video.
RaspberryPi2 & ROS: Continuation with Scilab simulation and a physical potmeter test on the oscilloscope. Results? Click the image to watch the video.
10 July Blog 382
RaspberryPi3 & PiXtend: Focus is on Python vs C, but first I have to deal with a mysterious network issue. Click the image to watch the video.
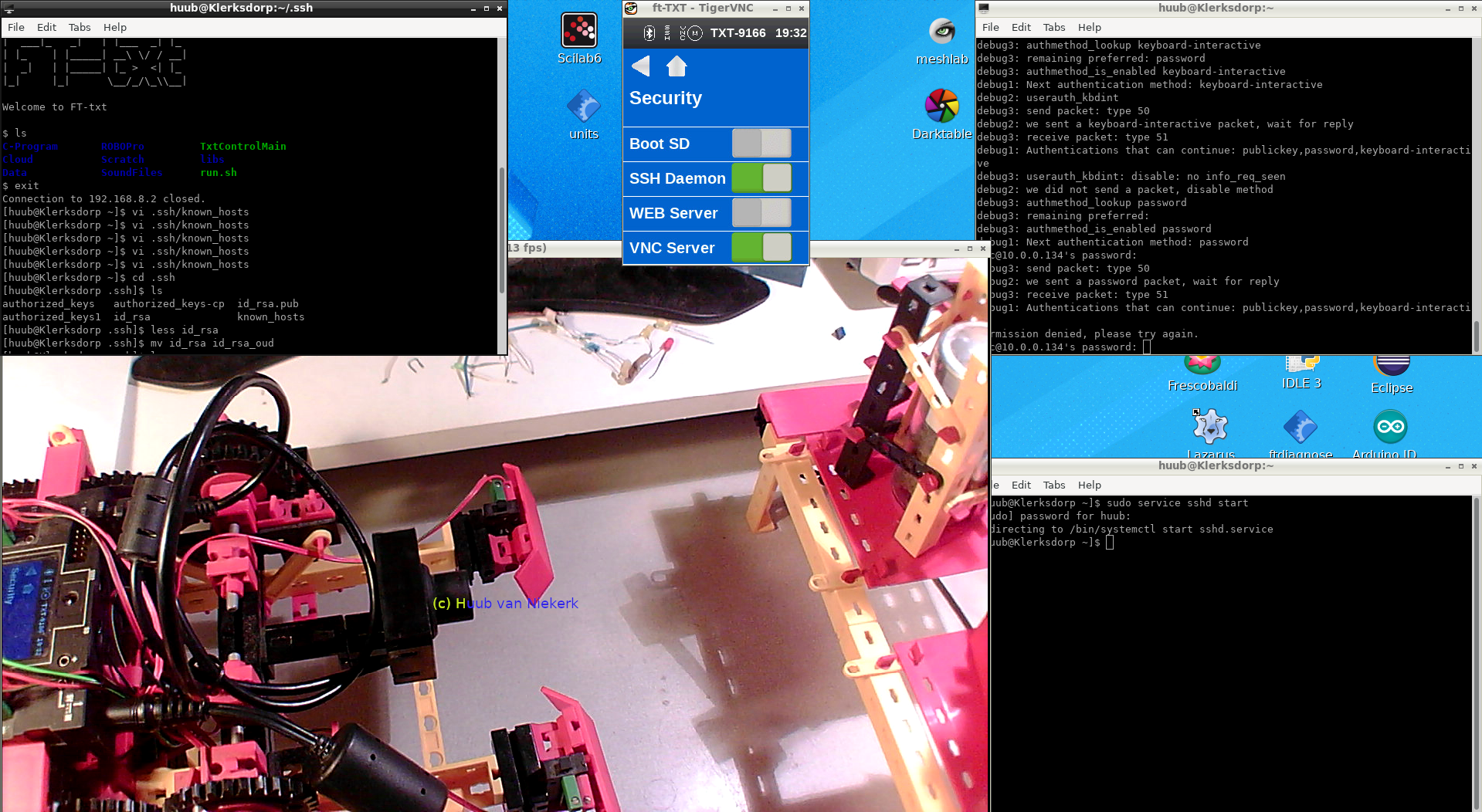
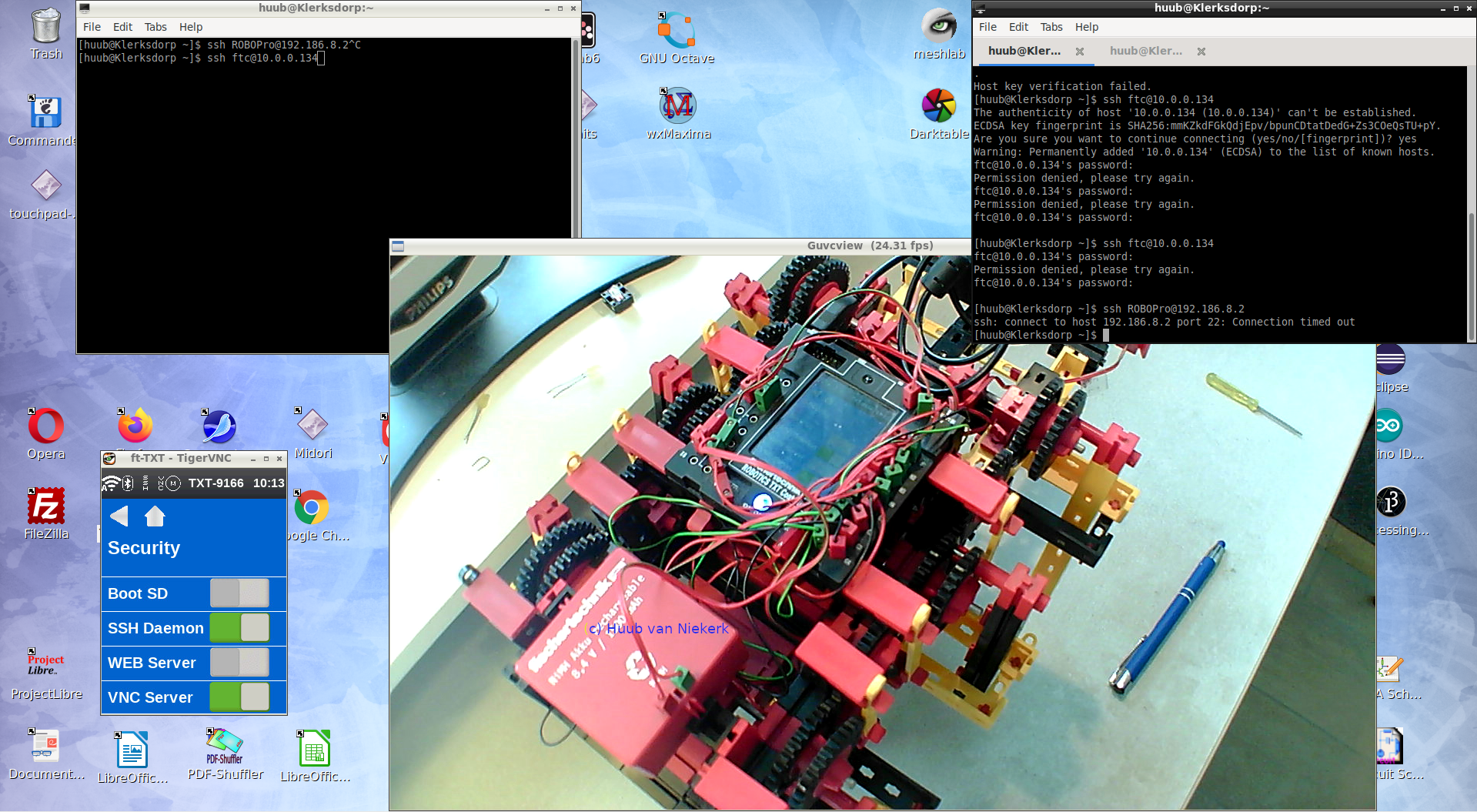
Discovery: Focus: VNC, webserver and Python/OpenCV. But first a password issue?! Then OpenCV gives some results, with something's off. So, Murphy's Law applies once again...Click the image to watch the video.
InfraRed: Focus: duration test, but first a change of setup for the motors and adding one. What's the result, if any? Click the image to watch the video.
BeagleBoard & rollertrack: The small magnet-chain keeps having problems, so it needs a reconstruction. Apart from that, a stabilzation can be applied. Click the image to watch the video.
3 July Blog 381
Hydraulics: The different piston to the system, which will drive a pivoting thing. But it will need water, so how to solve that? In the end, will it work? Click the image to watch the video.
Mirft2: Checking the ftcommunity firmware version and find out if that causes the camera issues for OpenCV. Also checking out the vnc server of the standard firmware. Click the image to watch the video.
Bluetooth: Improve the frame for the motors and using a bluetooth app from fischertechnik. How does it behave with joysticks for alonger time? Click the image to watch the video.

Hand: After the reinforcement of hand-pitch to elbow: it's time for another wrist-motor reconstruction. But what will come out of it? Click the image to watch the video.
26 June Blog 380
ESP32: Focus again on the microphone: But what's the solution? A potmeter? Click the image to watch the video.
Discovery: I have to do a firmware upgrade. After this has succeeded, I find some interesting options I have to explore next time. Then the USB issues... but first a check for the pictures. Click the image to watch the video.
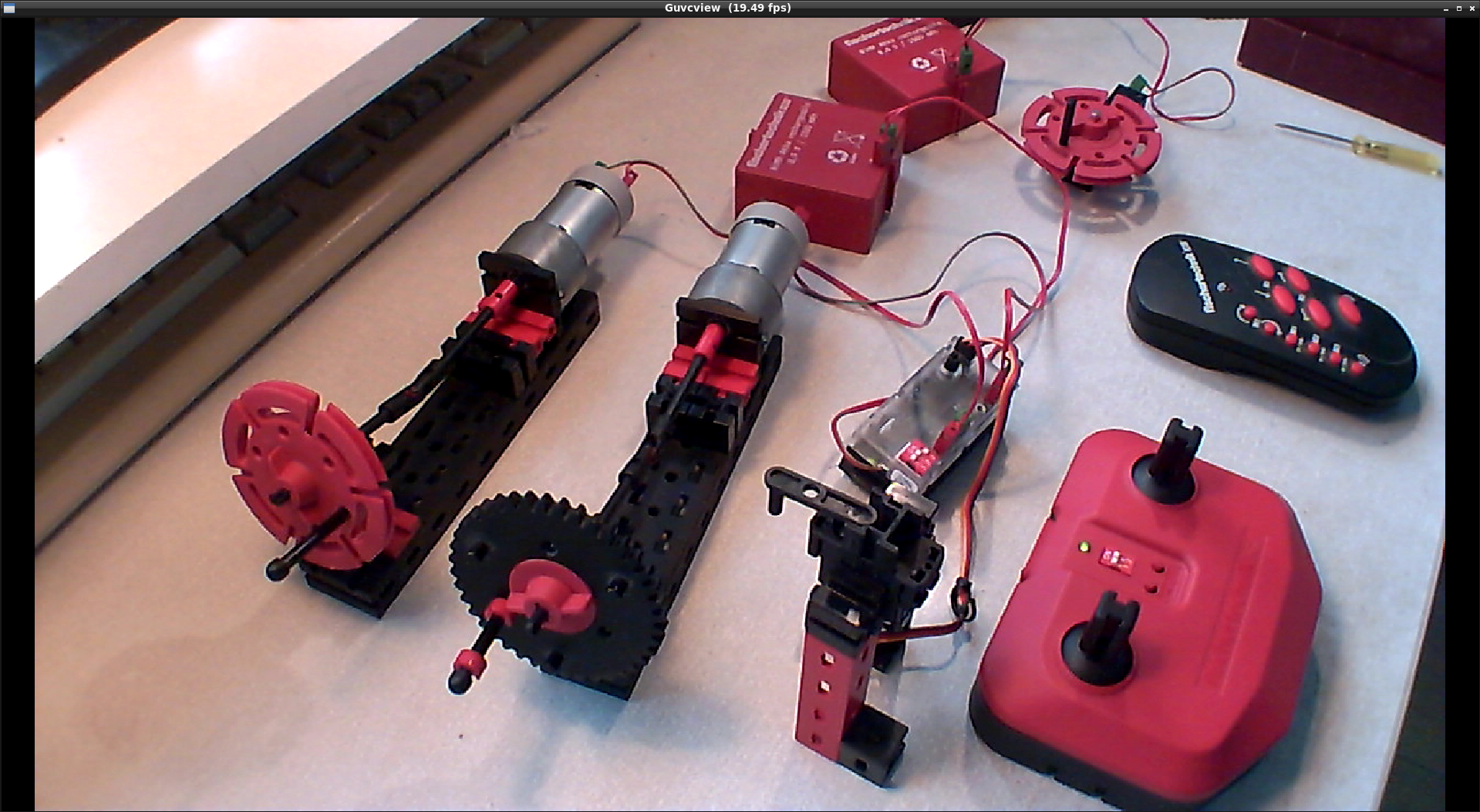
InfraRed: Two different InfraRed sets: with joysticks and the set with remote control. Testing the number of motors to be controlled and the responses. Some nice results but also questions. Click the image to watch the video.

RaspberryPi2 & ROS: Using 1 potmeter to solve voltage threshold, but how? Using a Scilab XCOS simulation to test, but what's up with it? Some unexpected but nice result on the oscilliscope, but what happens after that? Click the image to watch the video.
19 June Blog 379
RaspberryPi3 & PiXtend: Focus on Codesys (and a little pxauto). What does it take to get it (finally) running? Will I need Windows or can wine(-hq) do it? Click the image to watch the video.
Mirft2: Focus: upgrade the ROBOPro version and ftcommunity kernel to see if that solves problems. But I run into a question, or more. What works, and what doesn't. Click the image to watch the video.
BeagleBoard & rollertrack: Again testing cardan joints, but now with reverse gear. Will it work out or add another motor? Click the image to watch the video.
12 June Blog 378
Hydraulics: Adding a different piston to the system, which will drive a pivoting thing. But it will need water, so how to solve that? In the end, will it work? Click the image to watch the video.
Bluetooth: Widening the frame to reinforce the motors and using an iPad bluetooth app from fischertechnik. Click the image to watch the video.
Hand: The chain: what to do? Reinforcement of hand-pitch to elbow. Click the image to watch the video.
5 June Blog 377
ESP32: Focus again on the microphone: But what's the solution? A potmeter? Click the image to watch the video.
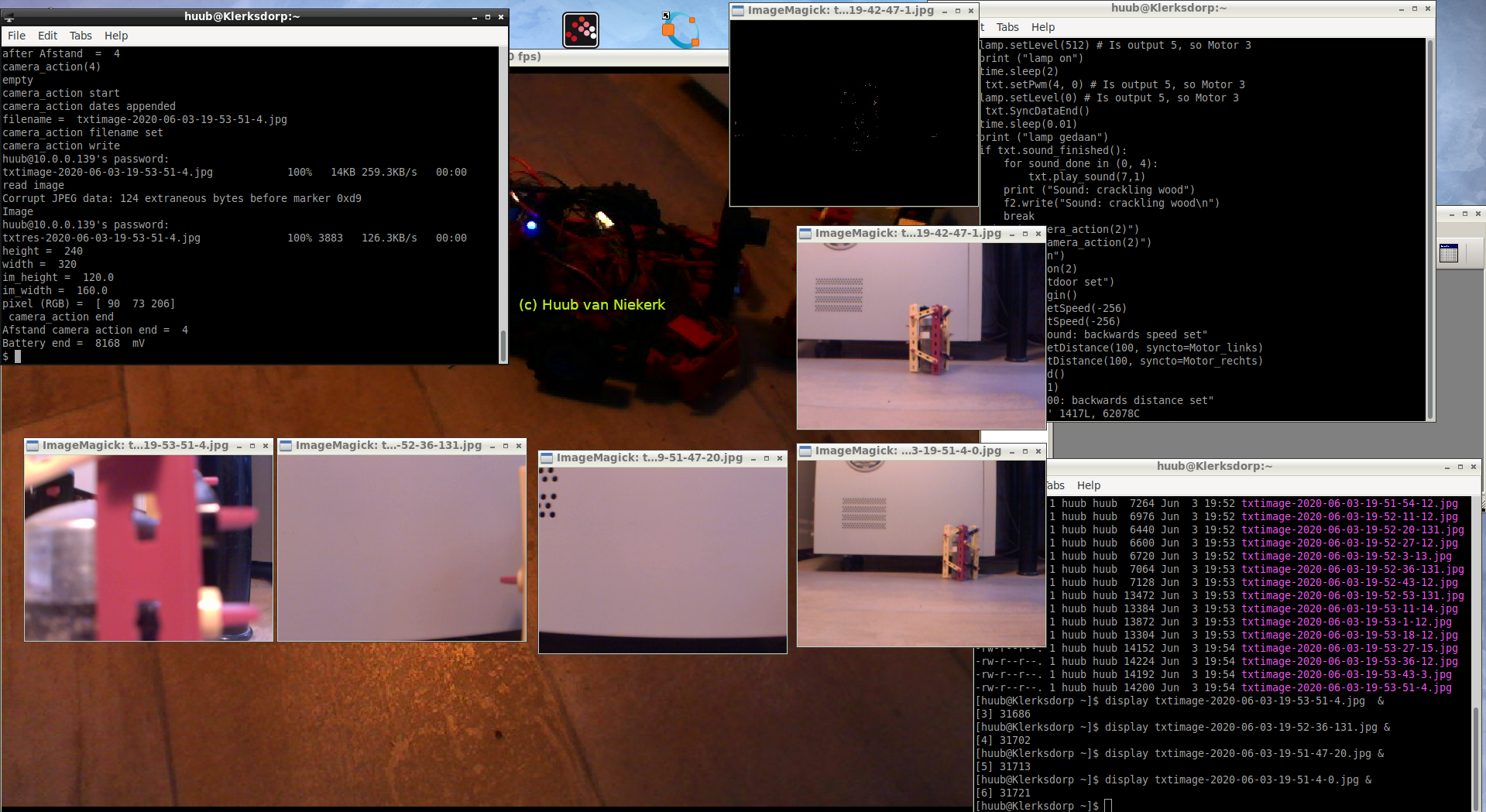
Discovery: Before I can check for the pictures, I face a power issue and update the schematics. Then, Python gives a problem in OpenCV, but what's up? Click the image to watch the video.
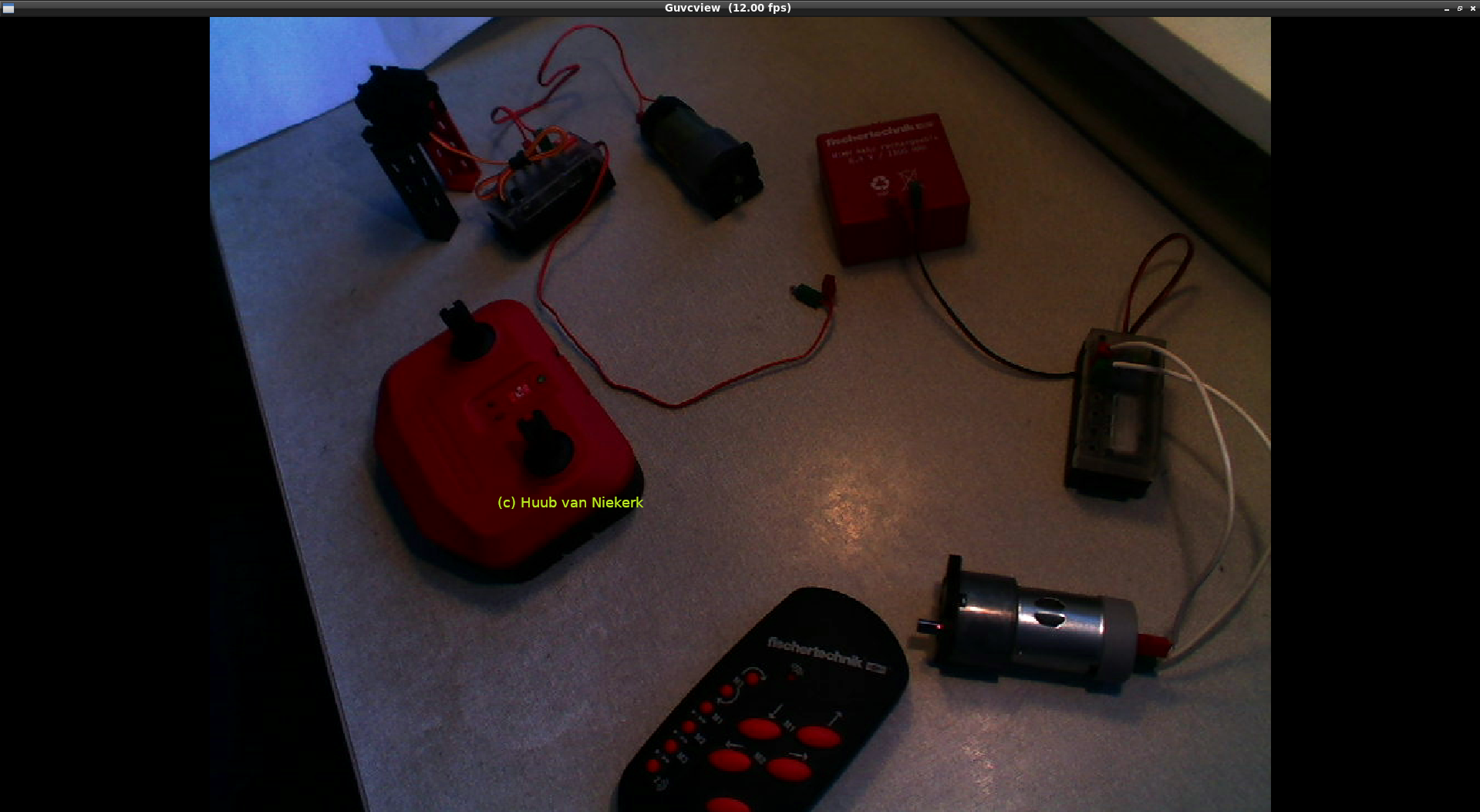
InfraRed: Introduction to the fischertechnik InfraRed set with joysticks and the set with remote control. Different receivers, 2 different motors. No programming. Click the image to watch the video.
RaspberryPi2 & ROS: The threshold issue: can 2 potmeters solve it? Using Scilab I come to some insight. But will some flashlight give a nice result? Click the image to watch the video.

29 May Blog 376
RaspberryPi3 & PiXtend: Focus on pxauto and Codesys. What are the results and does the change to a new Linux version make a difference? After the recording, some more change. Oops. Click the image to watch the video.
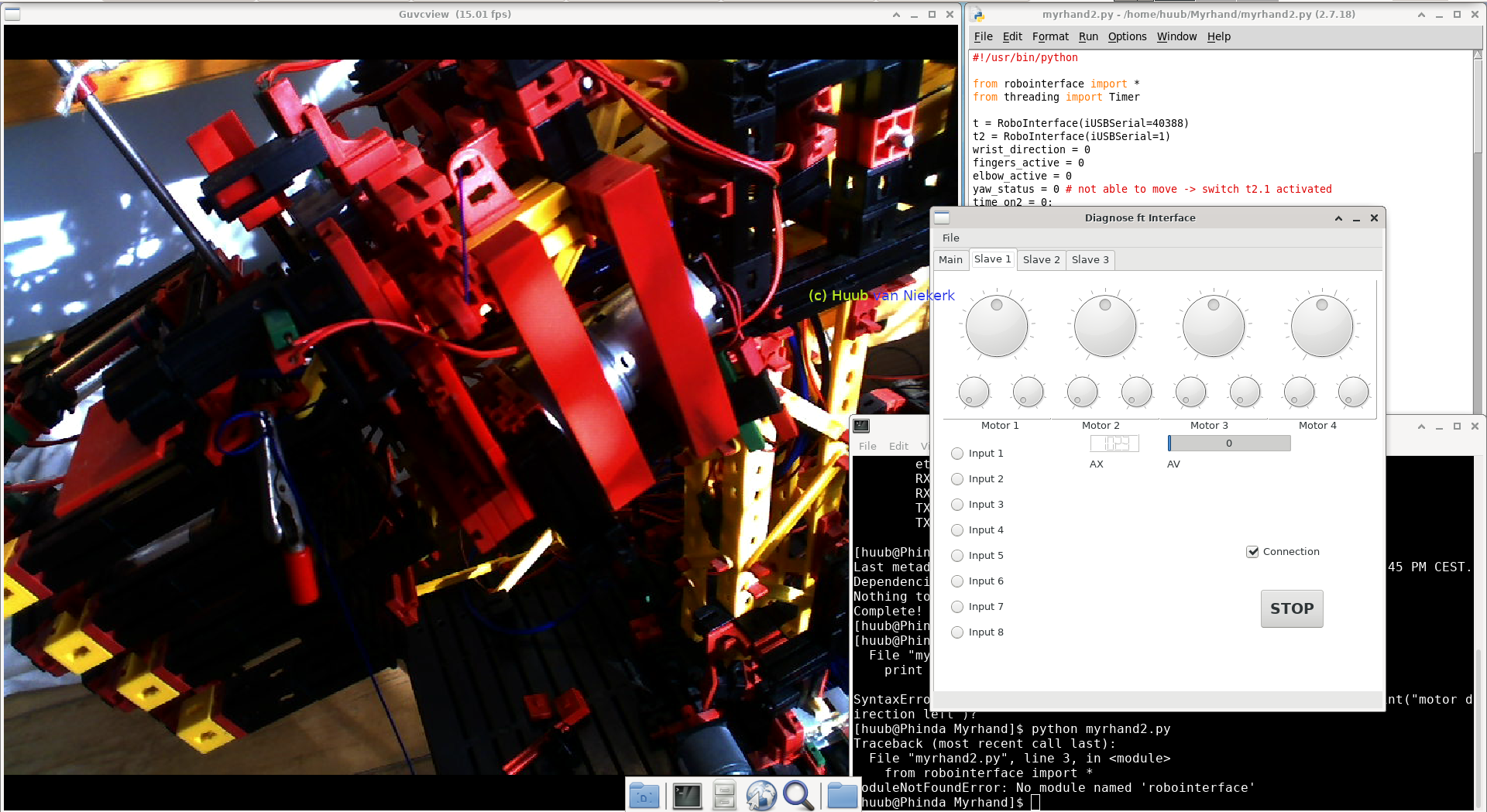
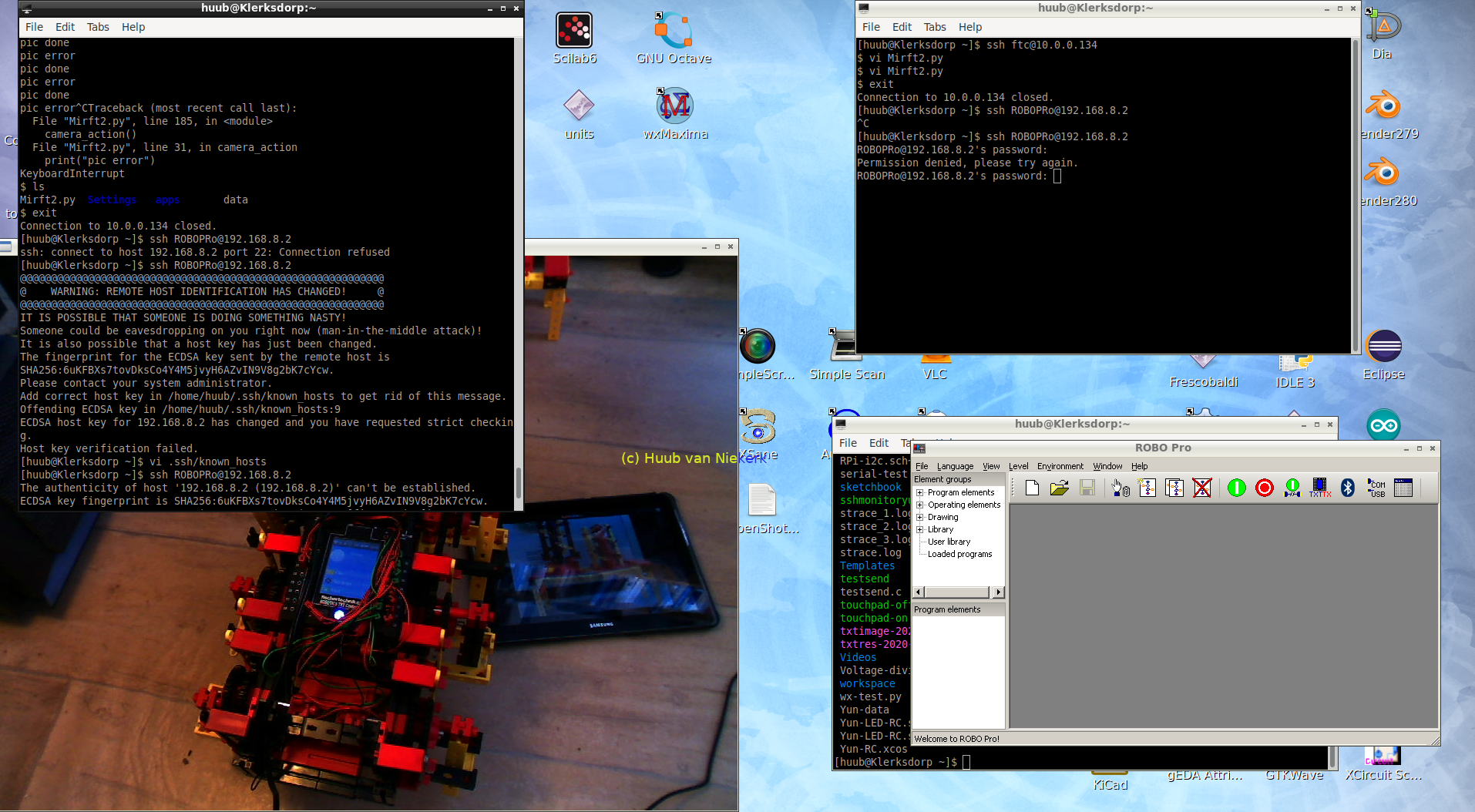
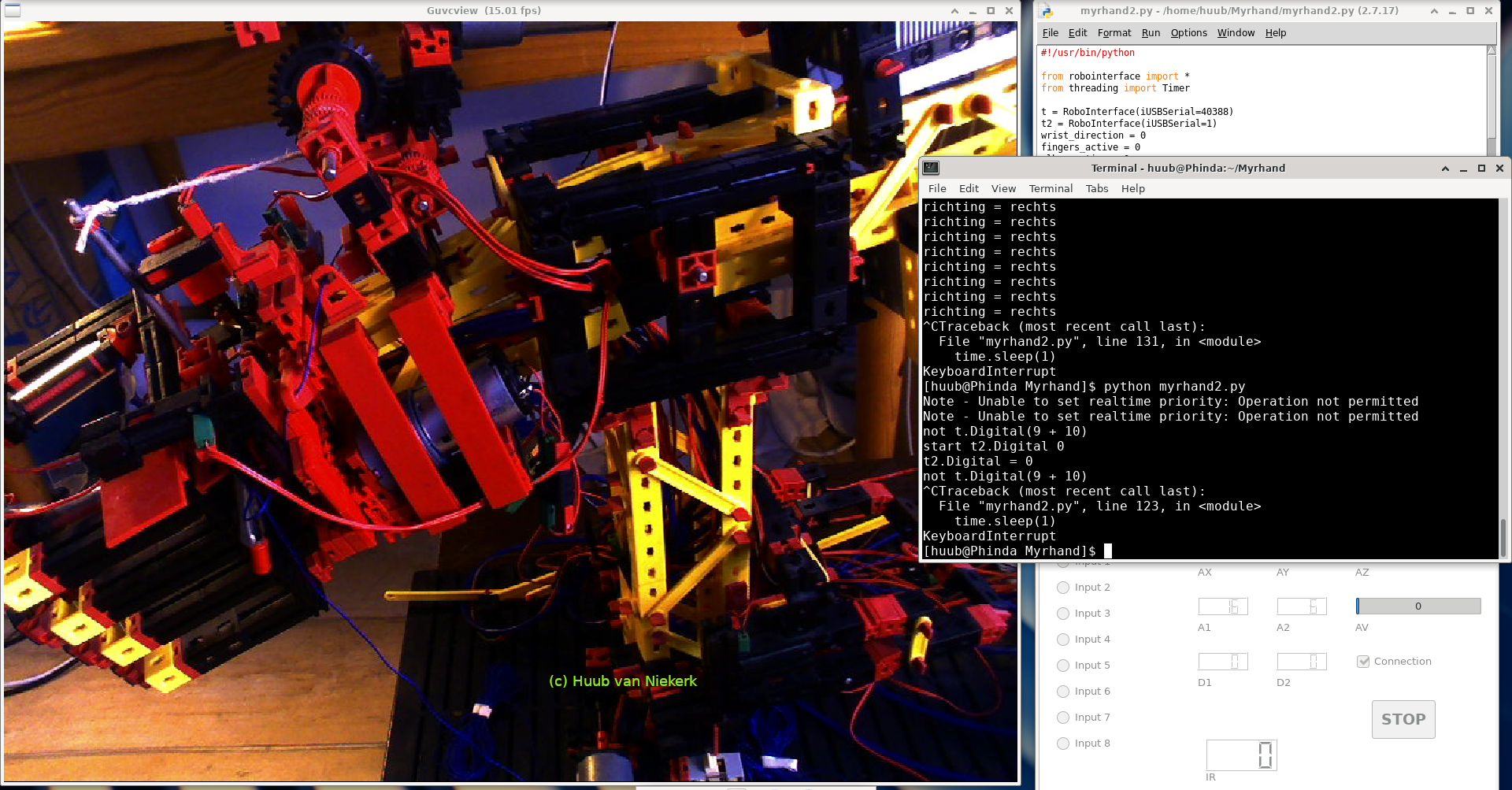
Mirft2: Focus 1: test the camera via python. This gives an unexpected USB oops, but why? Then 2: Short test using Android. Finally 3: Blender3D. Some progress, but a lot to do. Click the image to watch the video.
BeagleBoard & rollertrack: Again testing cardan joints, but now with reverse gear. Will it work out or add another motor? Click the image to watch the video.
22 May Blog 375
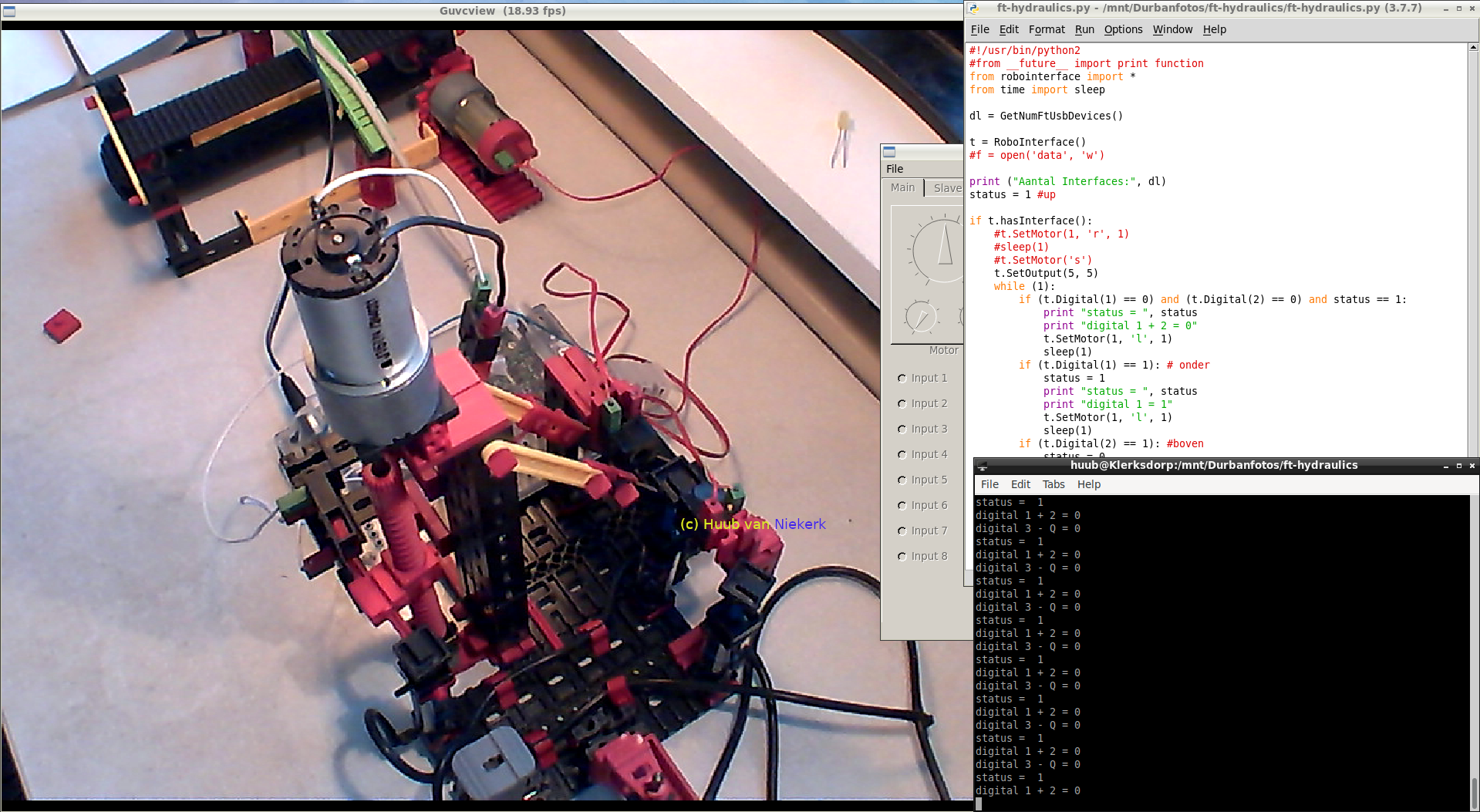
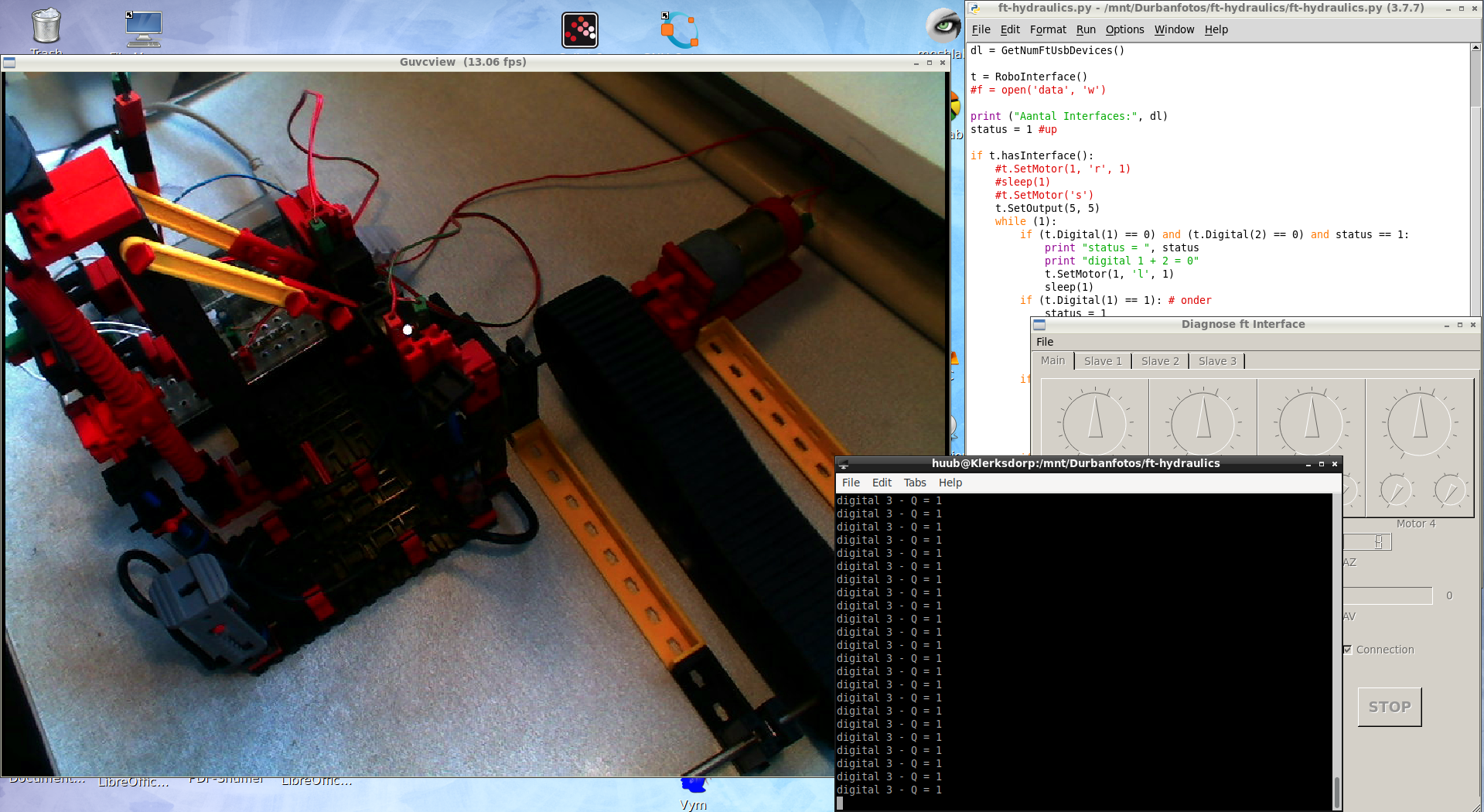
Hydraulics: After fixing the motor wiring for the screwpump, I need to check with the Python code and find the algorithm not fit with the lamp and phototransistor. After fixing this, I add a "conveyorbelt" to the 2nd motor. But does everything now work as expected? Click the image to watch the video.
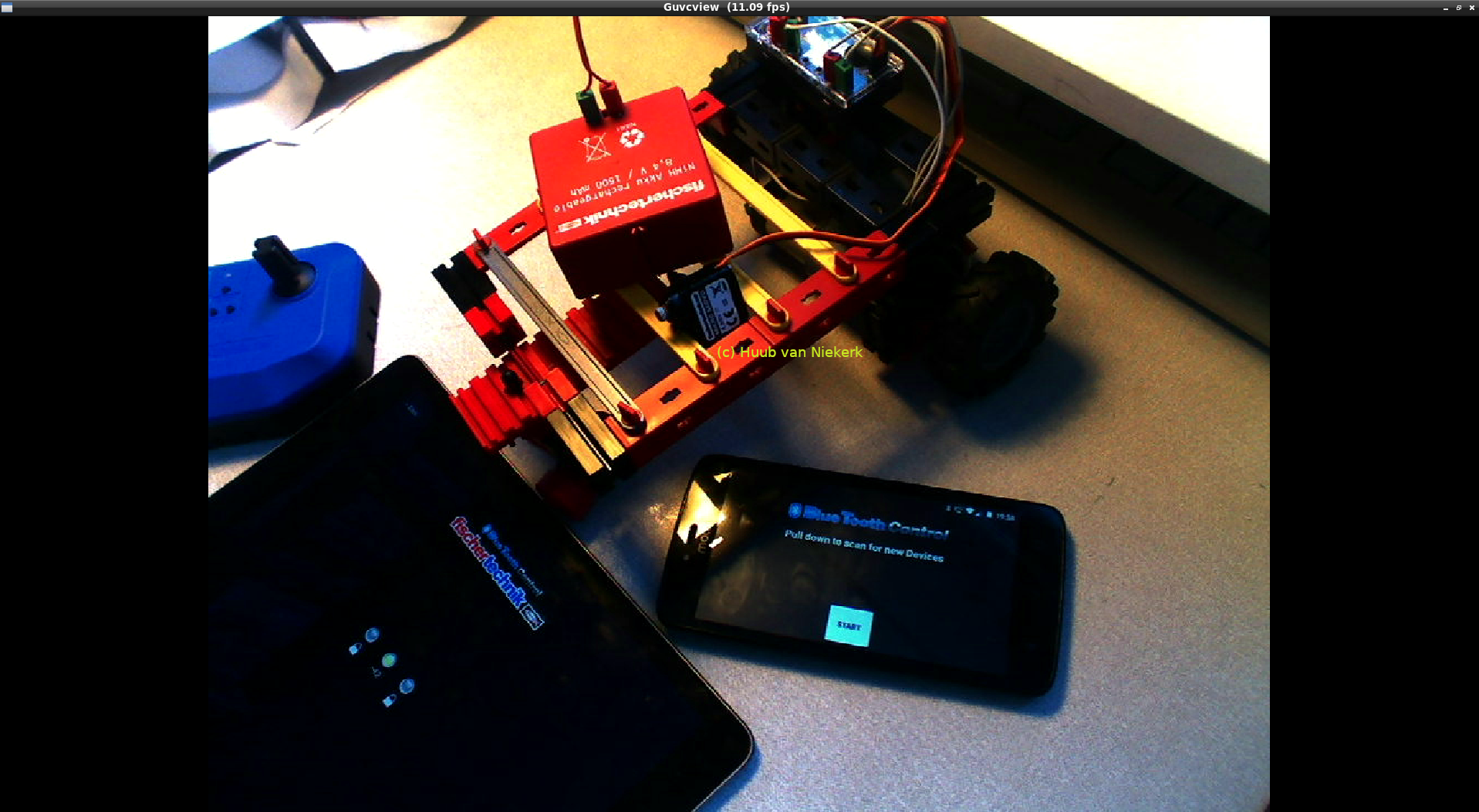
Bluetooth: Extending the frame and using an Android & iPad bluetooth app from fischertechnik. Will it all work? Click the image to watch the video.
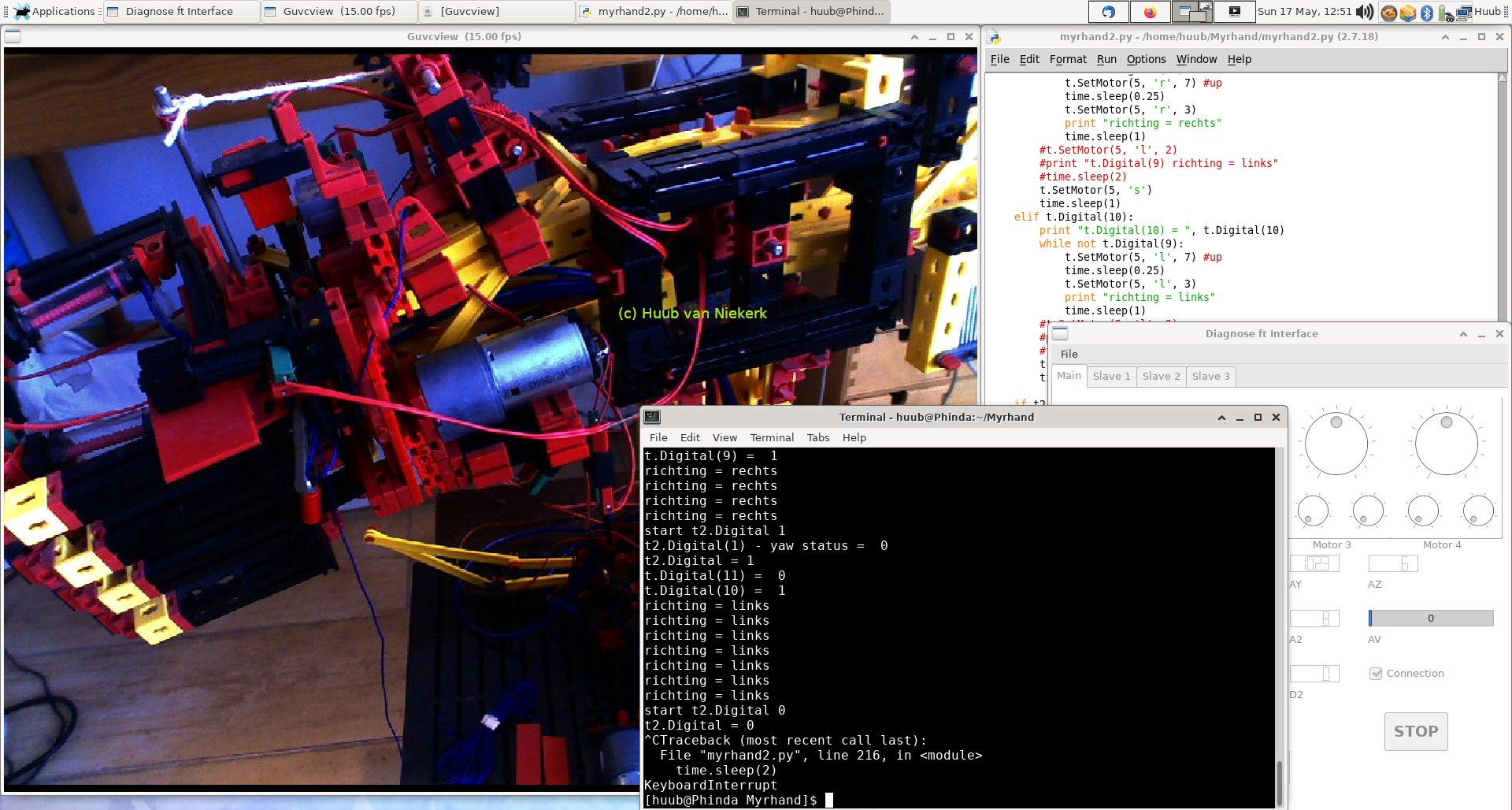
Hand: Focus is on the wrist: why doesn't it work properly? After easing the access the the motor and testing, I find I may have to choose about the chain. What to do? Click the image to watch the video.
15 May Blog 374
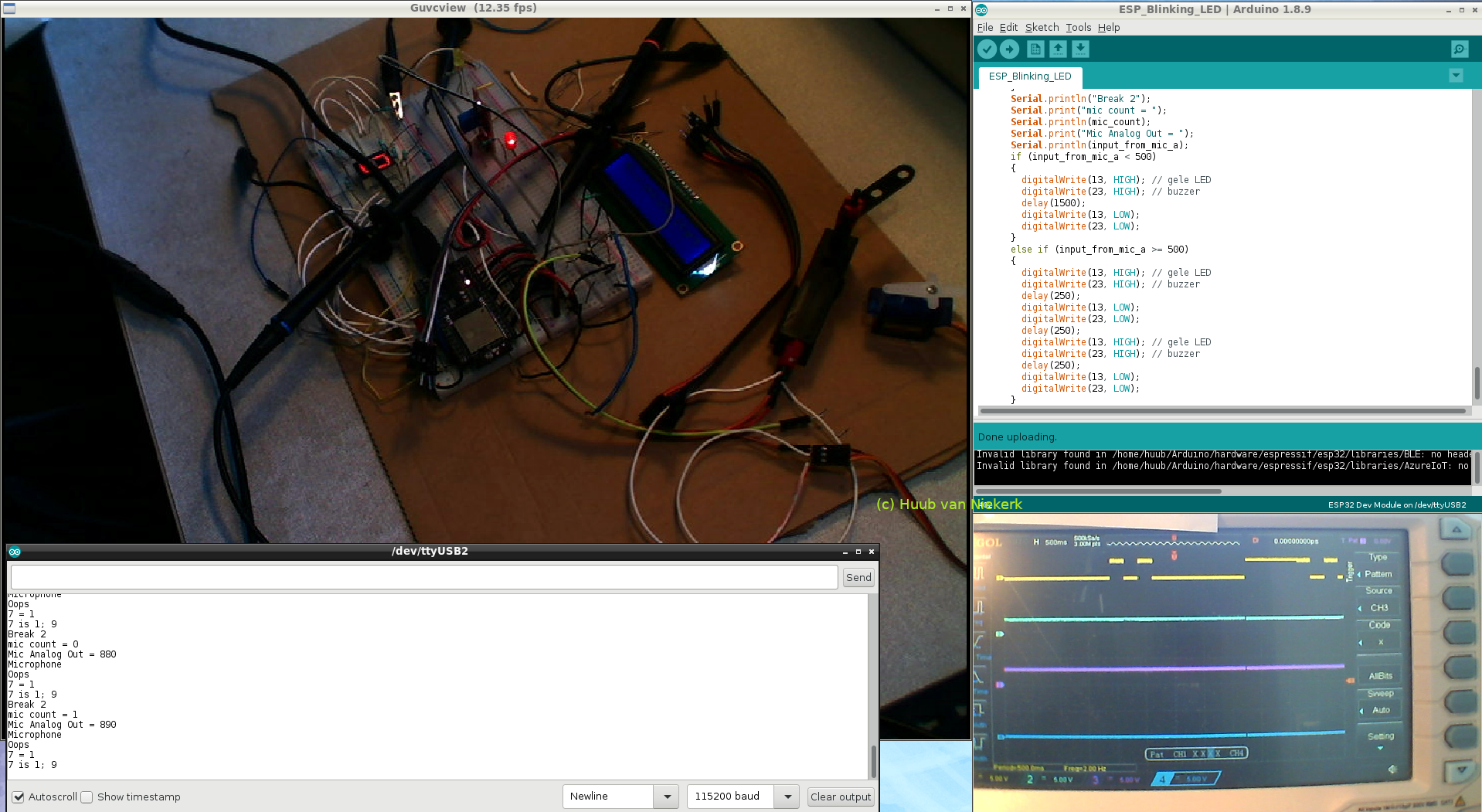
ESP32: Focus again on the microphone: But what's the solution? A potmeter? Click the image to watch the video.
Discovery: Before I can check for the pictures, I face a power issue and update the schematics. Then, Python gives a problem in OpenCV, but what's up? Click the image to watch the video.
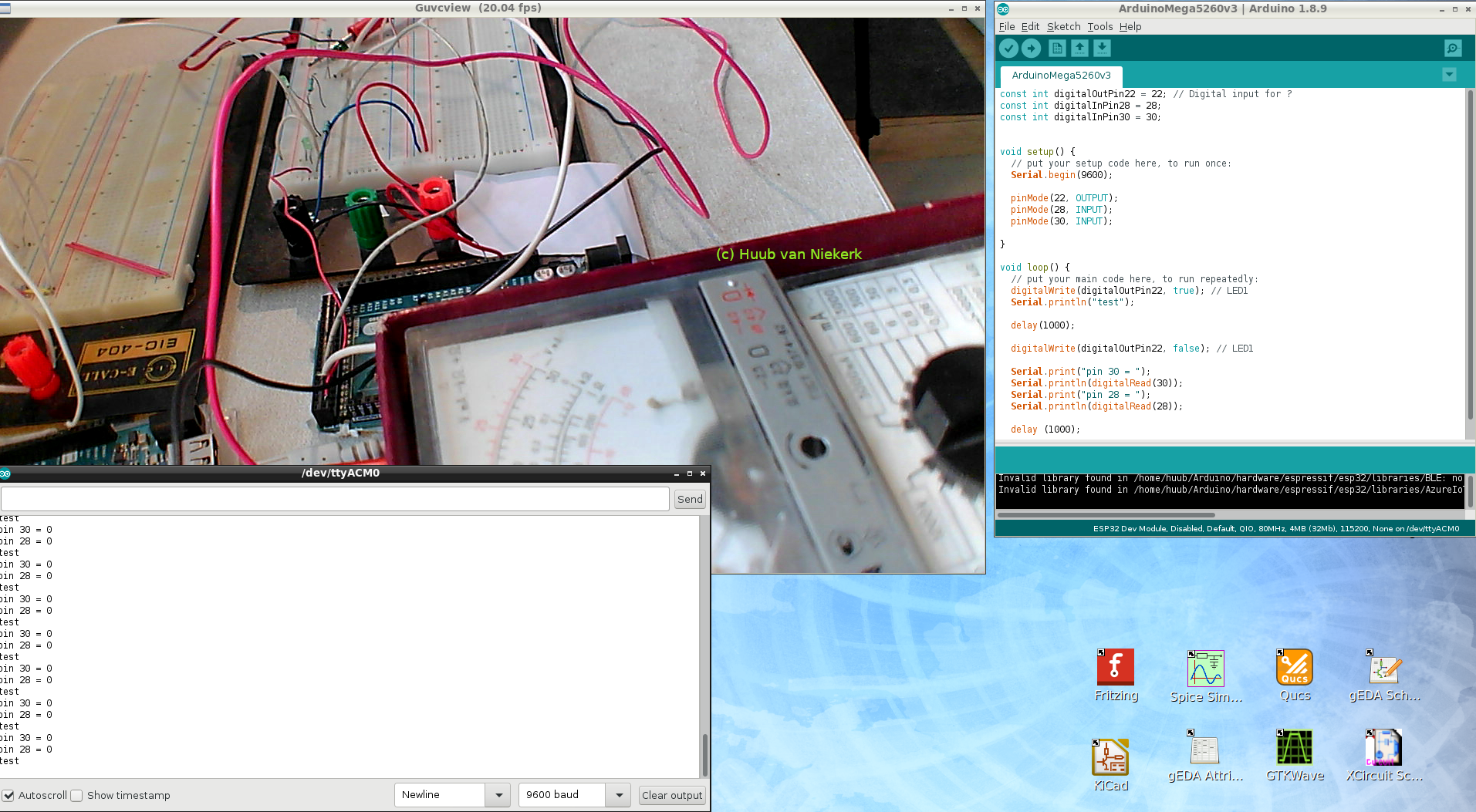
Arduino Mega2560: After checking the wiring and noticing how cumbersome it is to have 2 Arduino's on 1 pc, I decide to change the setup. But will this change the output in the terminal? Click the image to watch the video.
RaspberryPi2 & ROS: Checking the voltages gives a problem, being solved by wiring. But then: measuring where and how? Then the final question: how can I solve the threshold issue? If possible? Click the image to watch the video.
8 May Blog 373
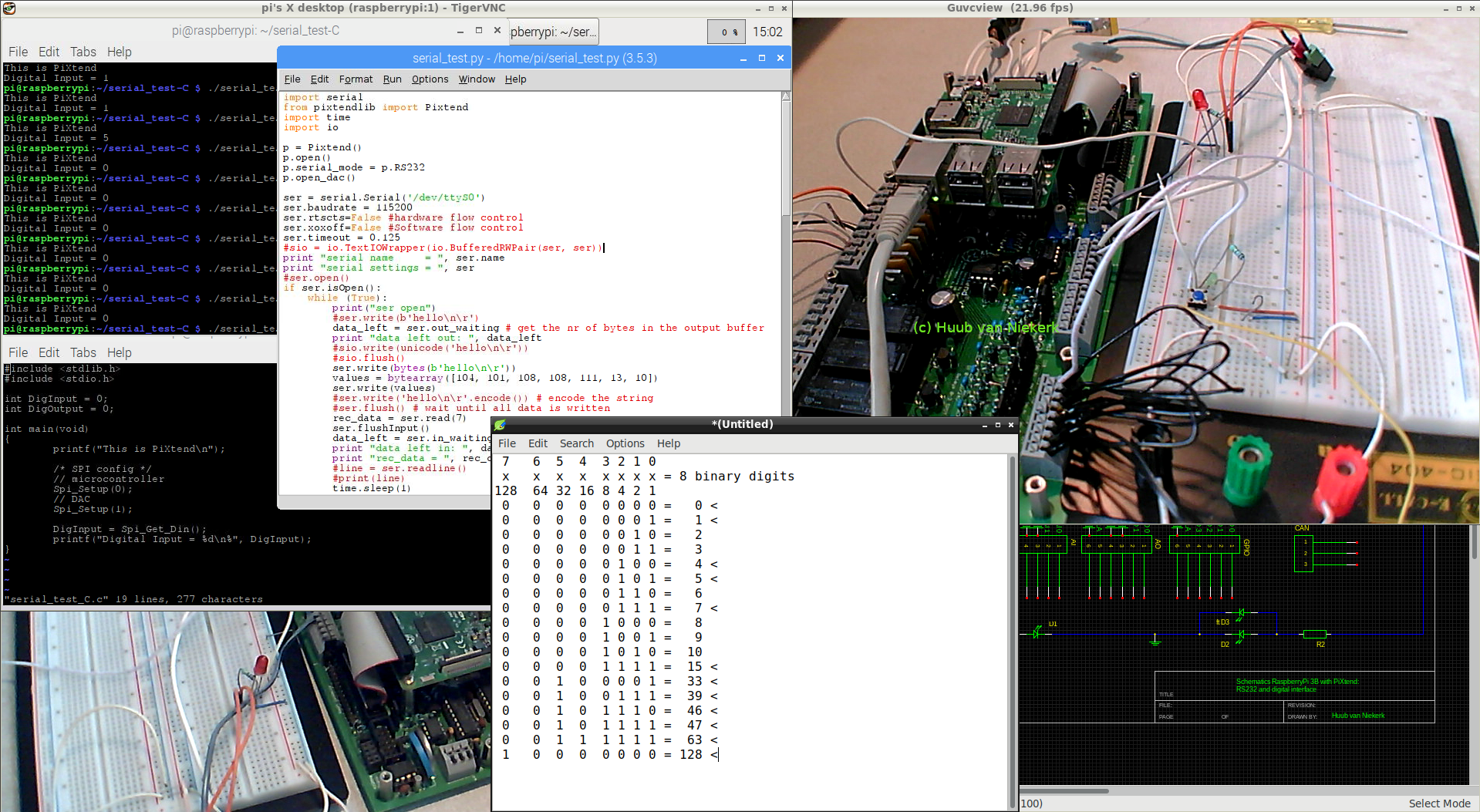
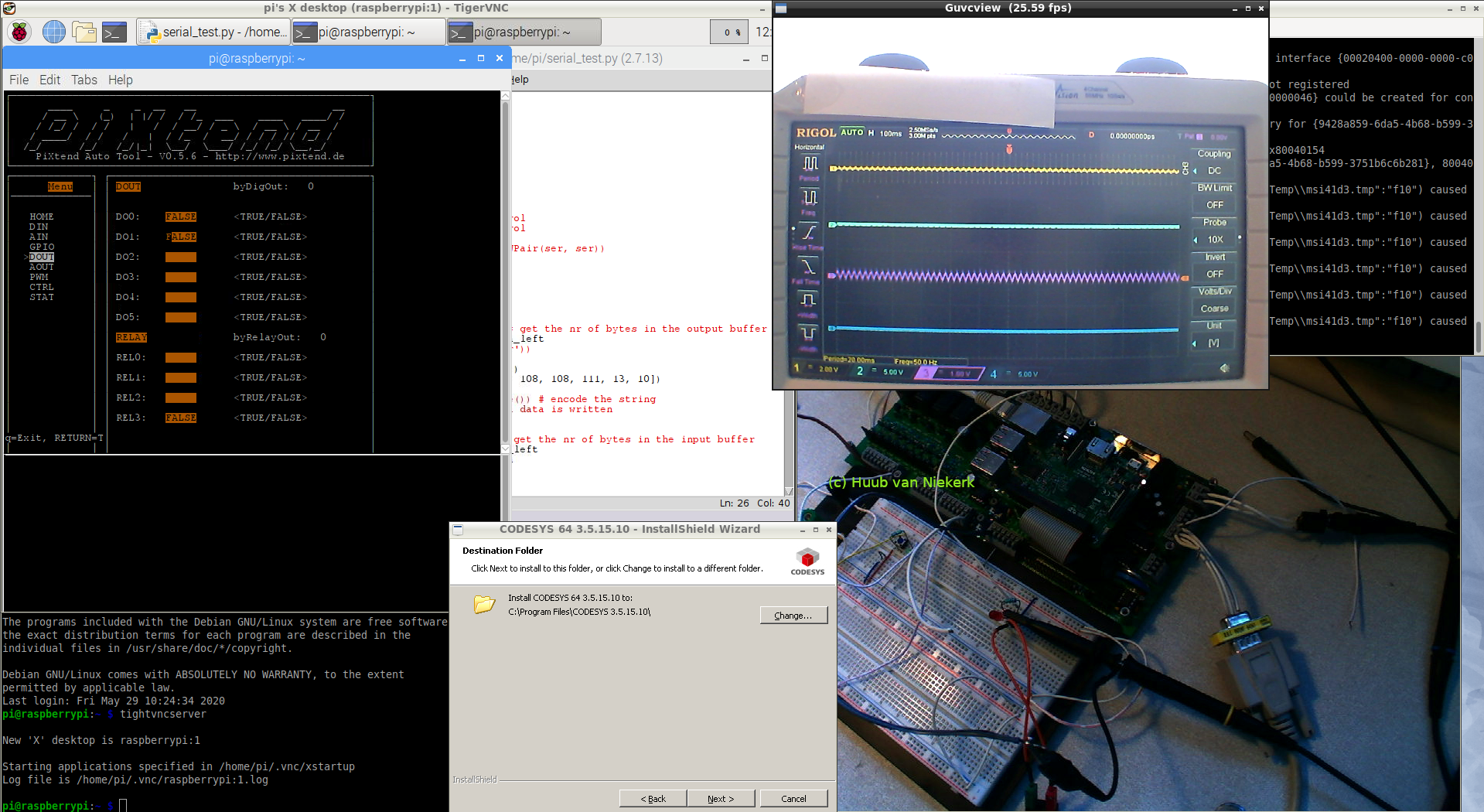
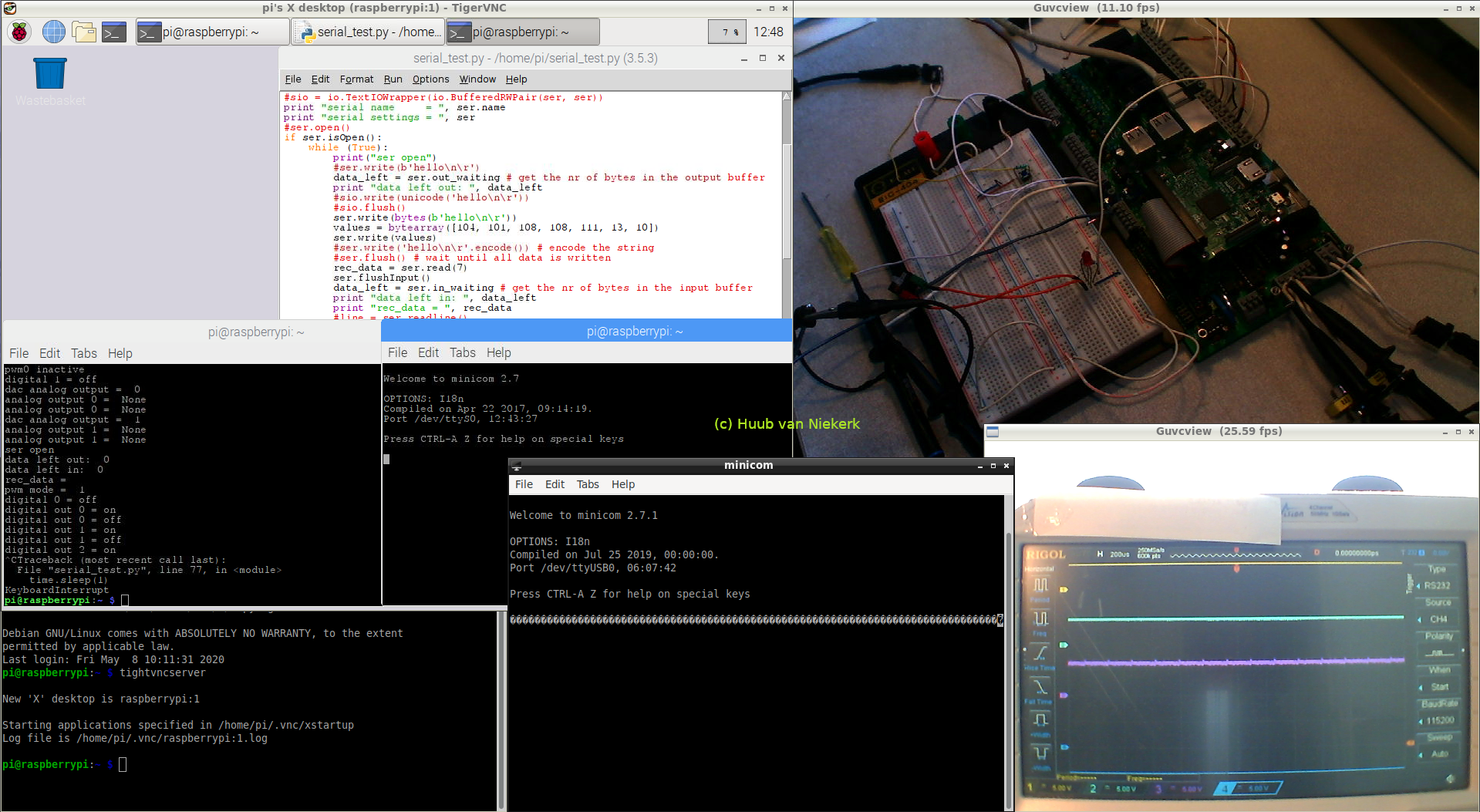
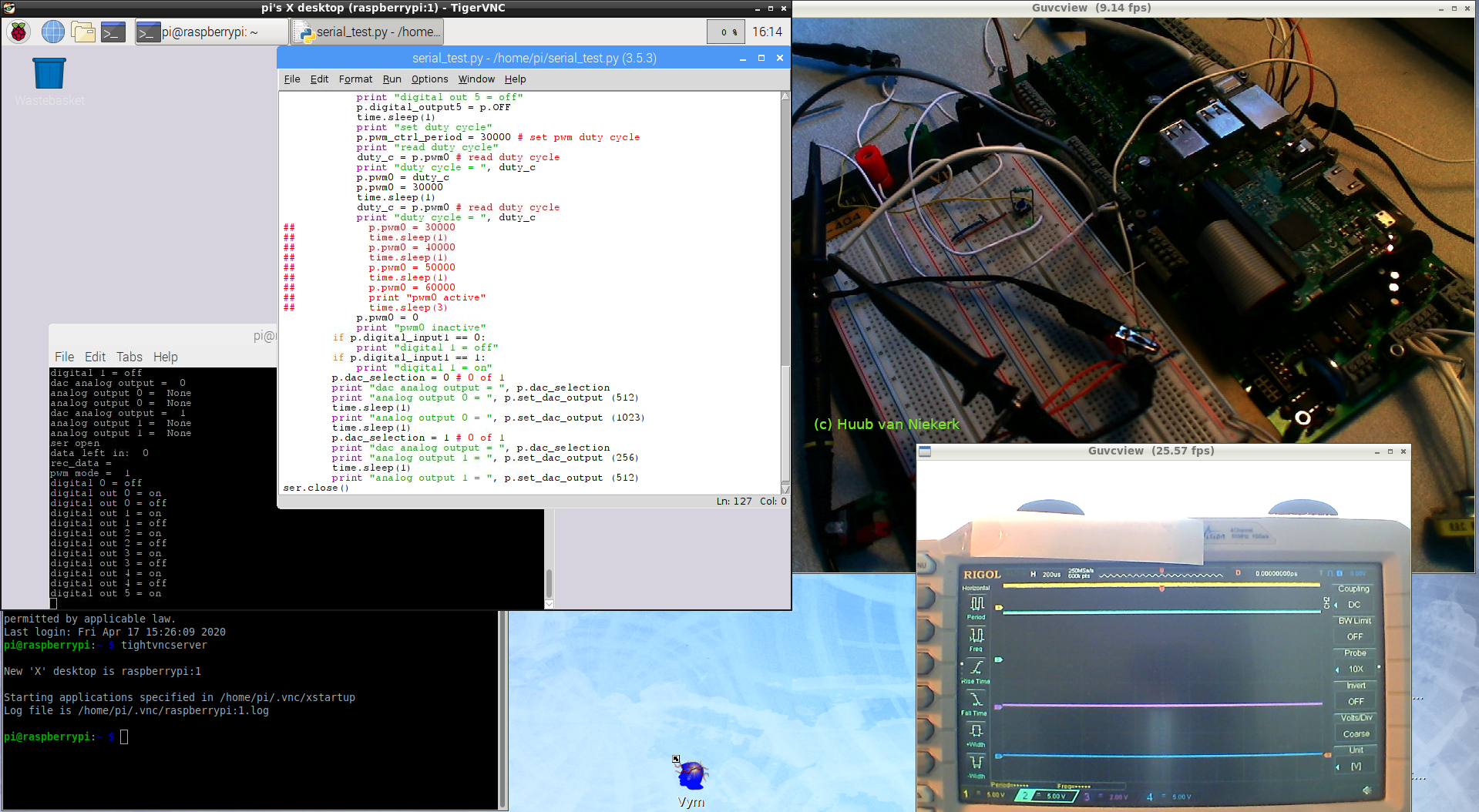
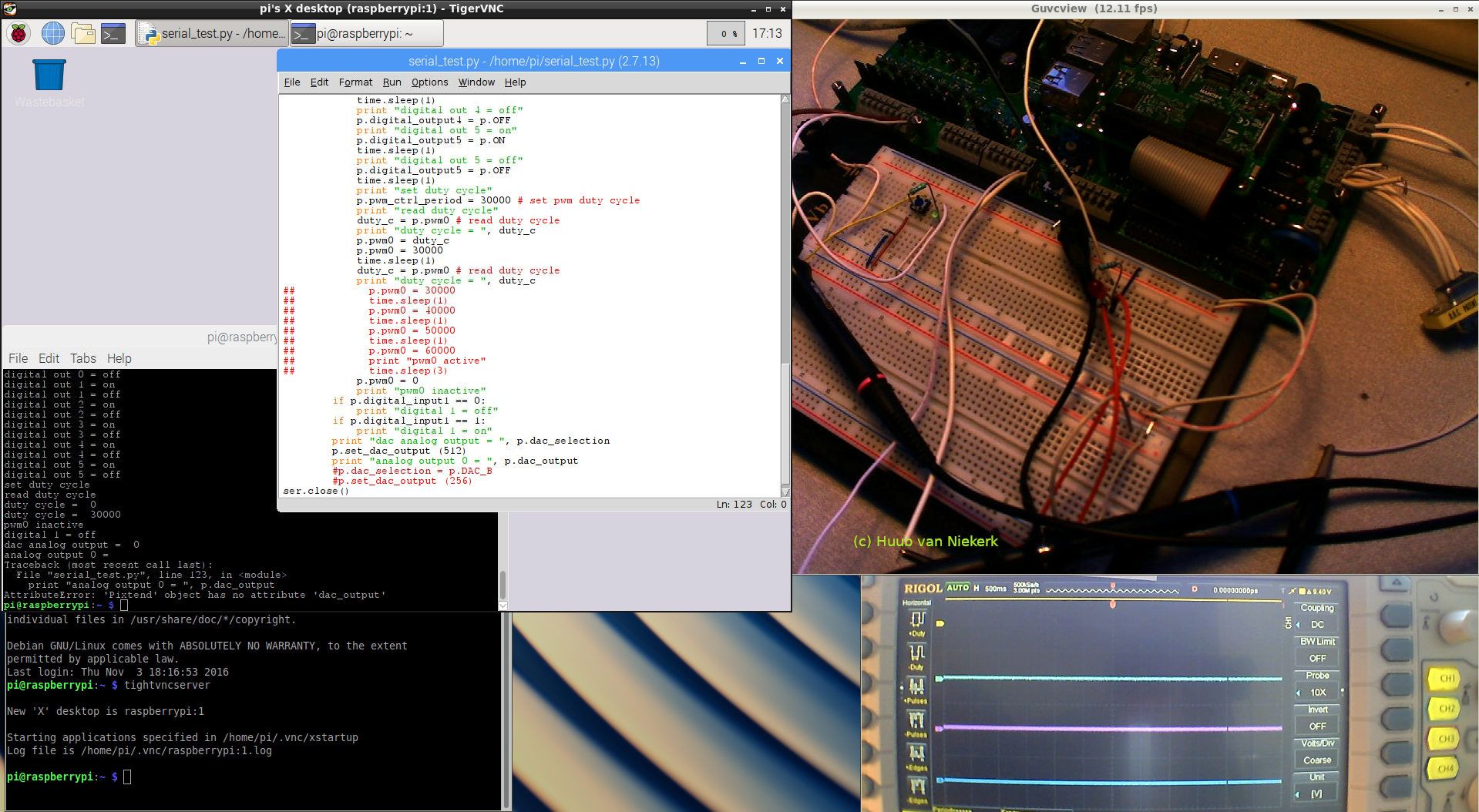
RaspberryPi3 & PiXtend: First focus: wiring to get an LED burning (or glowing). Then: RS232 serial en analog output via the oscilloscope. Some settings may show more clarity (or not...) Click the image to watch the video.
Mirft2: Testing the camera via python; it worked on the driving robot, but regarding some differences in detail: does it here? Short test using Android. Quick view on Blender3D and gEDA schematics. Click the image to watch the video.
RaspberryPi1B+: Almost a year has passed since the last use, so does it still work? Can I use the Raspicam? If so, how does the stream behave? Does the electronics still work? Click the image to watch the video.
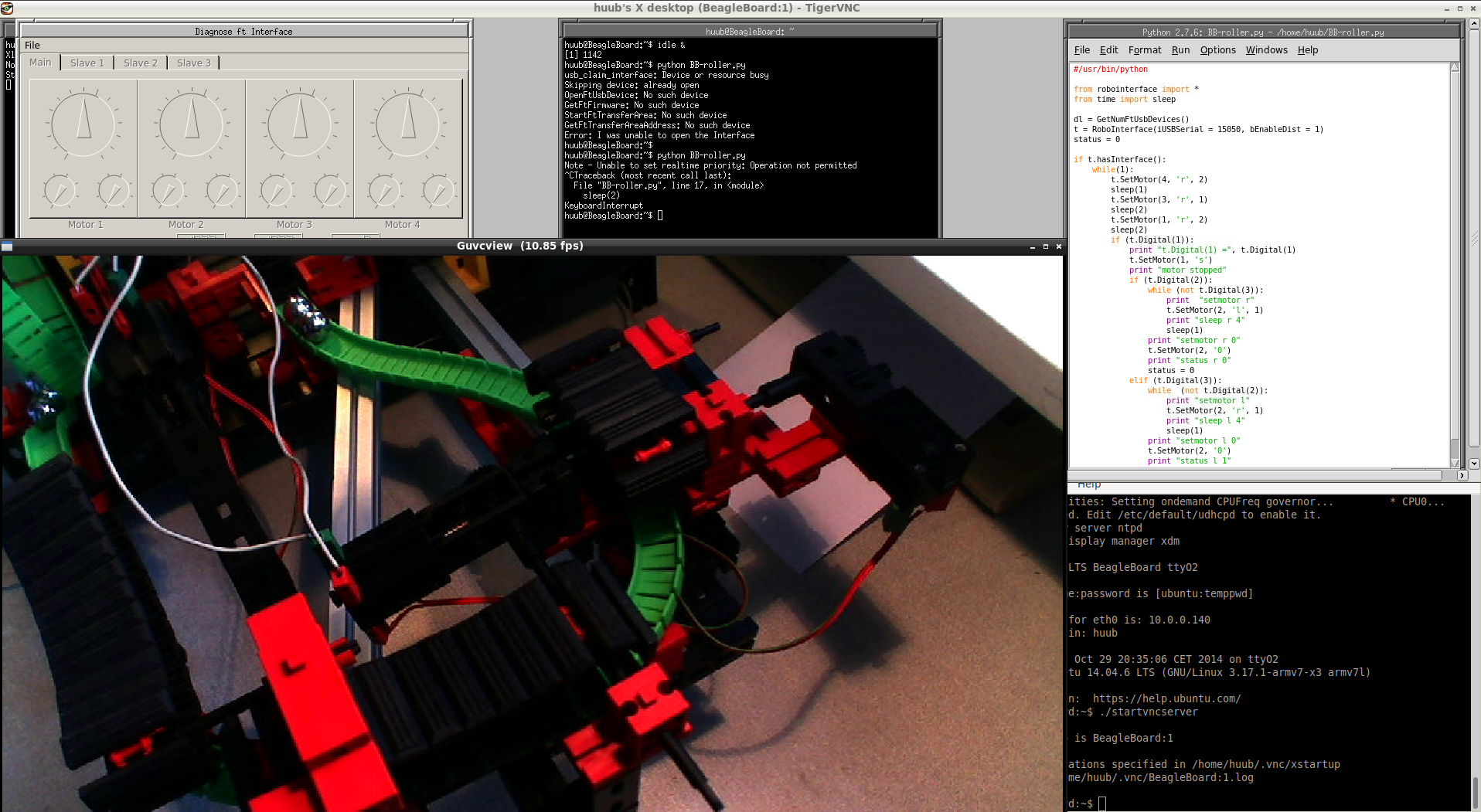
BeagleBoard & rollertrack: Continuing where I ended last time: introducing cardan joints to get another conveyorbelt going. Will it work out or end with another oops? Click the image to watch the video.
1 May Blog 372
Hydraulics: After finishing the basis, I want to expand. But how? Bring another motor but lacking some parts takes a turn for electronics and a reconstruction. Click the image to watch the video.
Bluetooth: I have to fix the motors to the frame and align them. Yet to come: using an Android & iPad bt app. Click the image to watch the video.
Arduino2560: Combining with the MegaADK and the Uno, also using the Apple Macbook. Does it all work? Click the image to watch the video.
Hand: Focus is on the wrist: the hand-pitch has issues and observation shows it works. But then: why does the hand not roll nicely from left to right and back? Then idea pops up. But what's the solution? Click the image to watch the video.
24 April Blog 371
ESP32: Focus again on the microphone: checking signals and finding out why it's not working the way I want. But what's the solution? A potmeter? Click the image to watch the video.
Discovery: After the sd-card riddle when comparing w/ the Mirft2, I want to try the camera again. So, using the community firmware, I enable all camera-related code. Will it work this time? Click the image to watch the video.
RaspberryPi2 & ROS: Continuing with the voltage divider: how can I check the signal on pin 13 w/out using the oscillscope? I can't, so using it sheds light on the cause of the problem. But how to solve it when there's a good reason for using electronics that way? Click the image to watch the video.
17 April Blog 370
RaspberryPi3 & PiXtend: Focussing on the analog output, I check with the oscilloscope and decide to change the algorithm, adding AO1. Together with AO0, it shows a result that is clear but not what I expected. Click the image to watch the video.
Mirft2: This time I bring the Discovery robot as well: what are the firmware and Linux differences? Wrong settings don't make it easier. A look at Blender3D as well for a new start. Click the image to watch the video.
Arduino Mega2560 S3: Back to the Arduino Mega2560 in combination with the MegaADK. Can I get the signal from one to the other? Sure, but something doesn't work despite theory. Click the image to watch the video.
BeagleBoard & rollertrack: Testing everything, things go wrong again at several points. After a little modification, I decide to add and reconstruct agian. But how to fill in for a motor I don't have? Click the image to watch the video.
10 April Blog 369
Hydraulics: After determining that wiring was ok, something needs to be fixed in the algorithm. But what? Finally, it seems to work out. Click the image to watch the video.
Bluetooth: Starting with a power oops and a battery fix, I find I need to reconstruct all of it to make it actually drive (or ride) and test the joysticks. In the end, it becomes obvious I forgot something.. Click the image to watch the video.

Hand: Focus is again on stability of the yaw. After some checking, I need to improve 2 places, with positive results. And then I find an old problem acts up again, and the wrist needs some attention. Click the image to watch the video.
3 April Blog 368
ESP32: Focus on the microphone again: checking the pin numbers .. and I have to change some details. But the result raises a question: what's the difference between the LEDs? Click the image to watch the video.
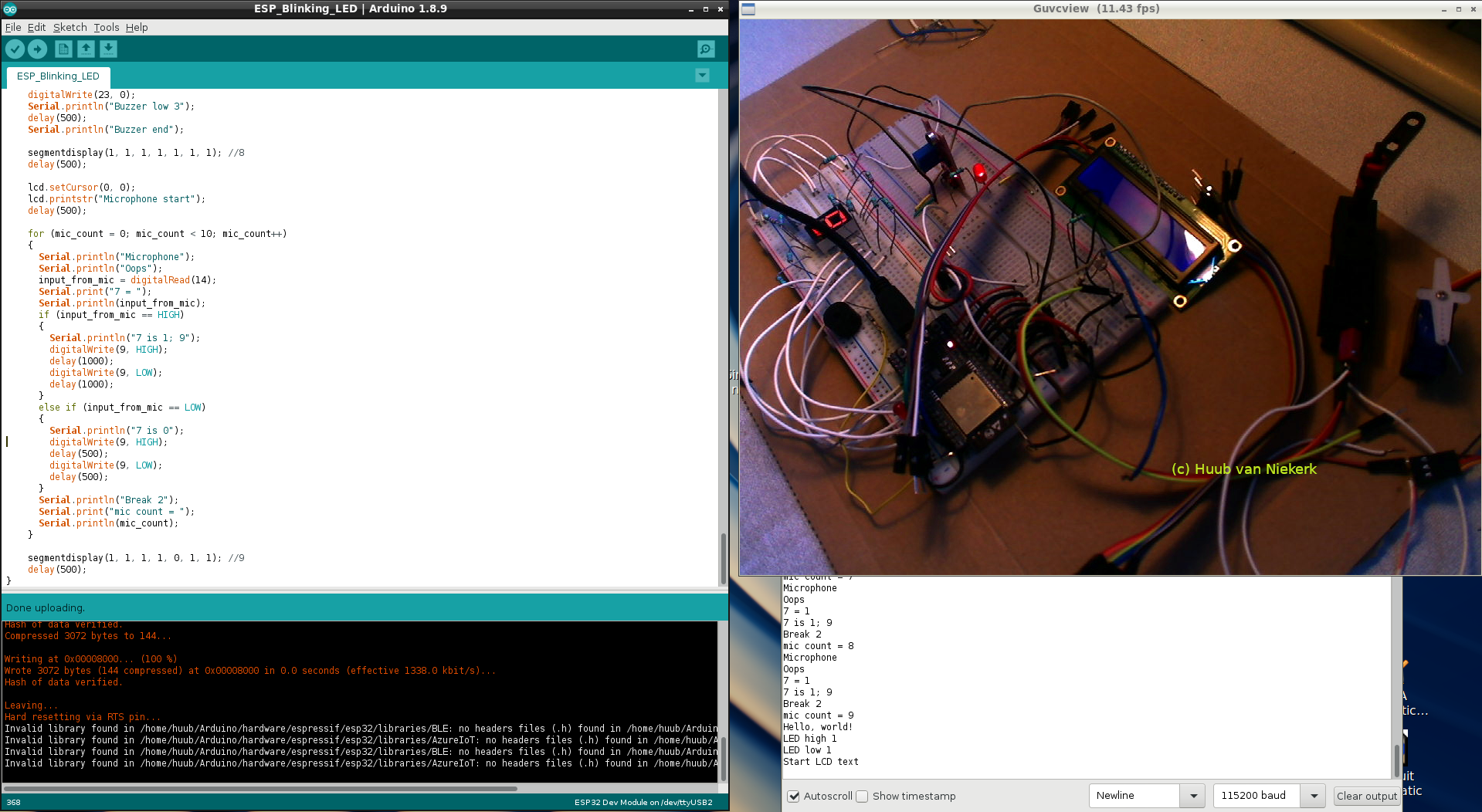
Discovery: First, checking the joysticks on my Android tablet. Now that I have 2, what can I do? I'm in for a short-term surprise. With the iPad is a different story. Then, on to Python and another nice surprise. Click the image to watch the video.
RaspberryPi2 & ROS: Continuing with the voltage divider: how can I check the signal on pin 13 w/out using the oscillscope? Adding some screenoutput..but what's the result? Click the image to watch the video.
27 March Blog 367
RaspberryPi3 & PiXtend: Continuing with the analog output, I also add another LED to digital out. But what are the results? Why does the oscilloscope give a straight line? Click the image to watch the video.
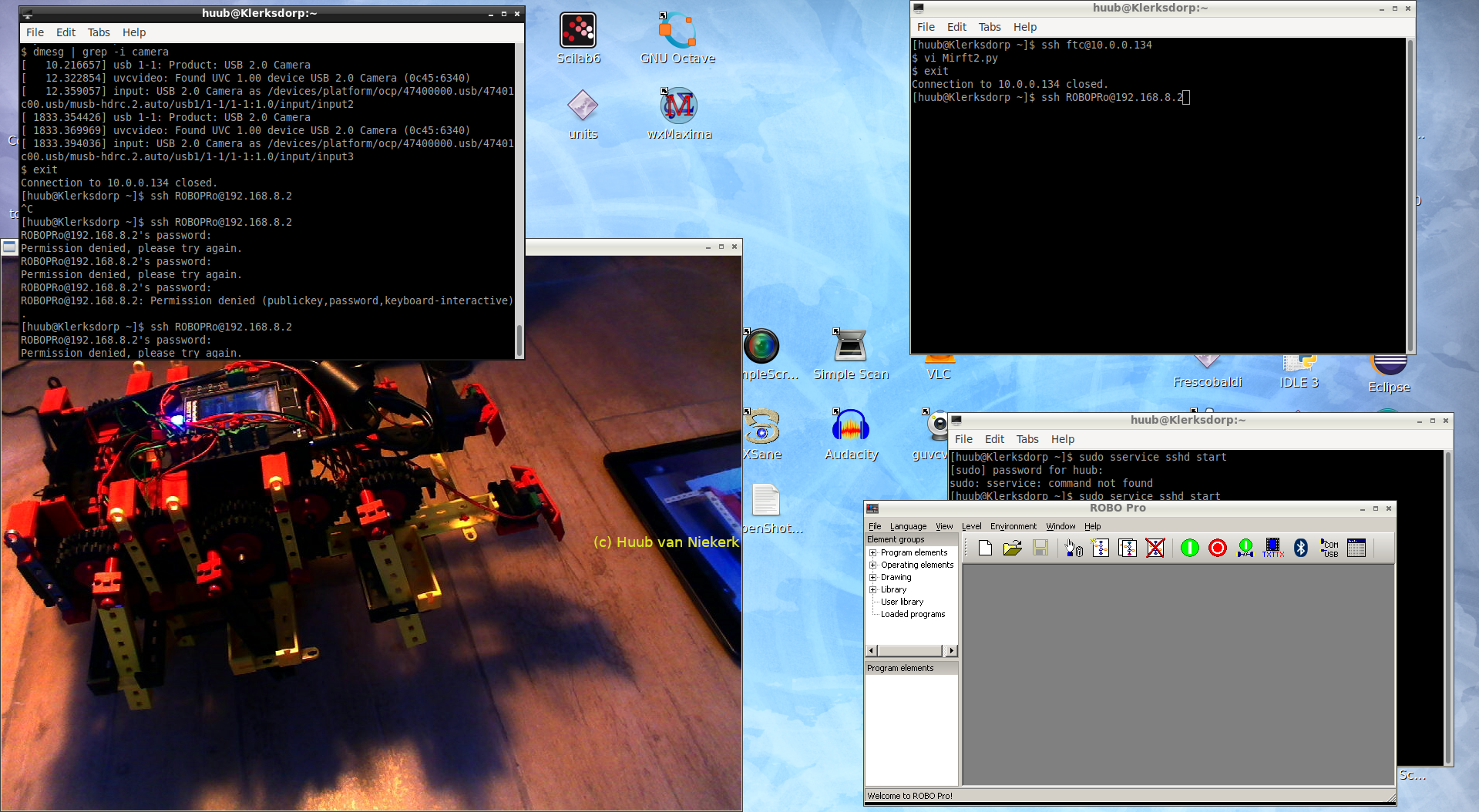
Mirft2: Focus is on how to best control the roboti: Python or Android or iPad? Using the joysticks, I decide to do a floortest. But what result will it have? Then the Python test shows some error which is odd. Click the image to watch the video.
BeagleBoard & rollertrack: Focussing on the new conveyorbelt: I have to improve its stability. Some reconstructions are needed. And maybe a velocity change. Does it all work out? Click the image to watch the video.
20 March Blog 366
Hydraulics: Focussing on the sensors: does the Python code work? I need to change something for the motor, and I need console output. Also, what's with the conditions? Some oopses. Click the image to watch the video.
Bluetooth: Start of a new topic: the fischertechnik Bluetooth set with joysticks and a servomotor. To be added: some motors. So how does it all work? Click the image to watch the video.
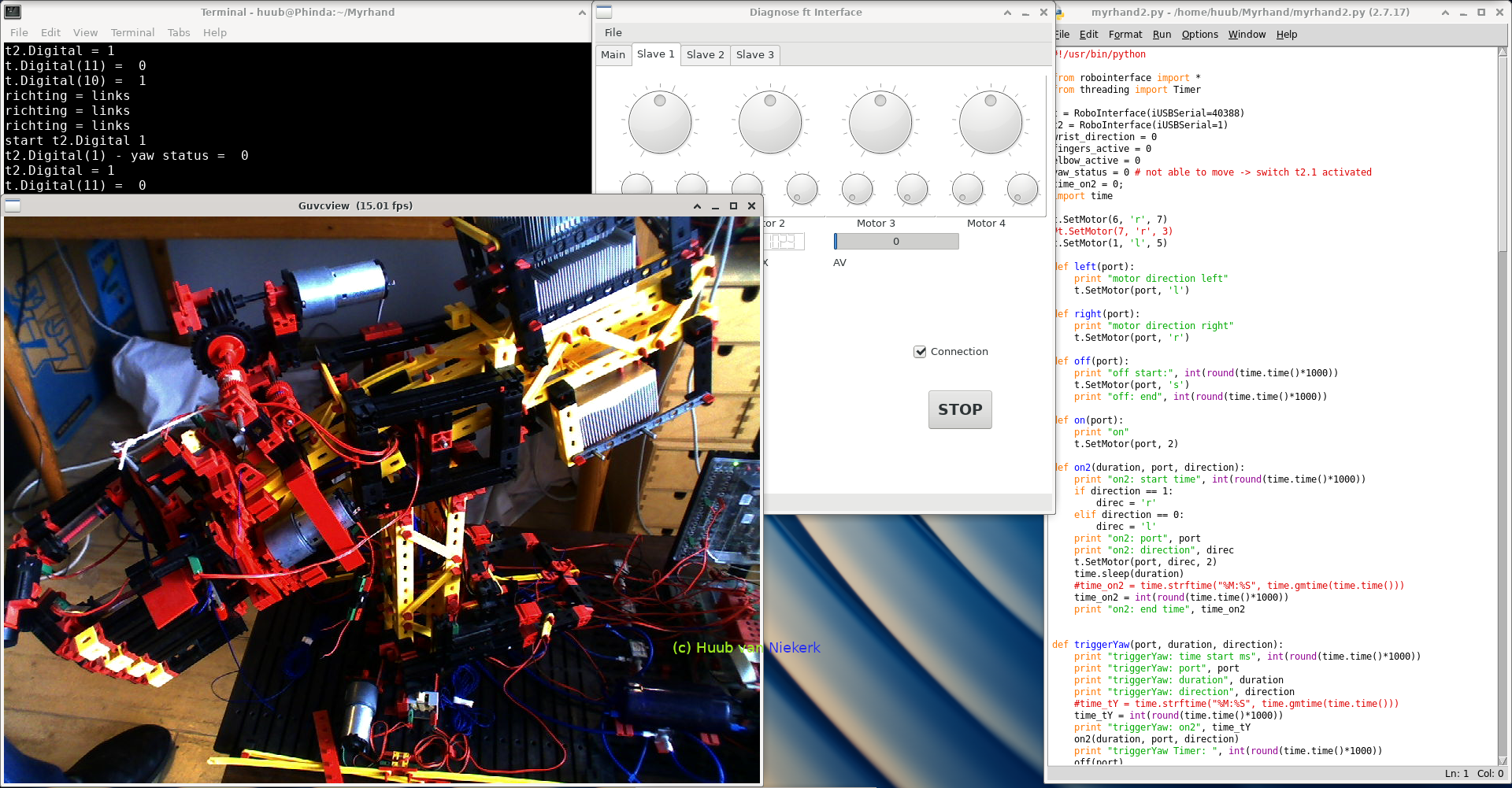
Hand: The forcus is on the wrist: how can I make it work properly again. Then, using the diagnose tool and Python, I find that there are some stability and robustness issues. Then an idea pops up. For next time. Click the image to watch the video.
13 March Blog 365
ESP32: Focus on the microphone again... but how can I make it work? Test pin-numbers, check the wiring, run the program. Does it look ok in the terminal? Or do the results somehow contradict, again? Click the image to watch the video.
Discovery: Focus on control and camera via Python/Android/iPad/ROBOPro: what can simultaneously? The result isn't making hopeful. After recording I do a short test with the Android smartphone and notice a difference with the tablet. Next time.... Click the image to watch the video.
RaspberryPi2 & ROS: To find out if there's anything wrong with the circuit, I decide to add an LED and measure the voltage. This requires the use of a good lamp, so I use my smartphone again. Considering the results, I need to dive into the code. Or is it the algorithm? Click the image to watch the video
6 March Blog 364
RaspberryPi3 & PiXtend: Completing the schematics of the PiXtend, I find that I can do an experiment with analogue output. So how to accomplish this? Click the image to watch the video.
Mirft2: Focus again on Python & default firmware. What runs and what (or when) doesn't? Some surprises and some oops. Click the image to watch the video
BeagleBoard & rollertrack: Focussing on the transportation of the marbles across the lower track, I decide to add another conveyor. But how? And will it work out? Click the image to watch the video.
28 February Blog 363
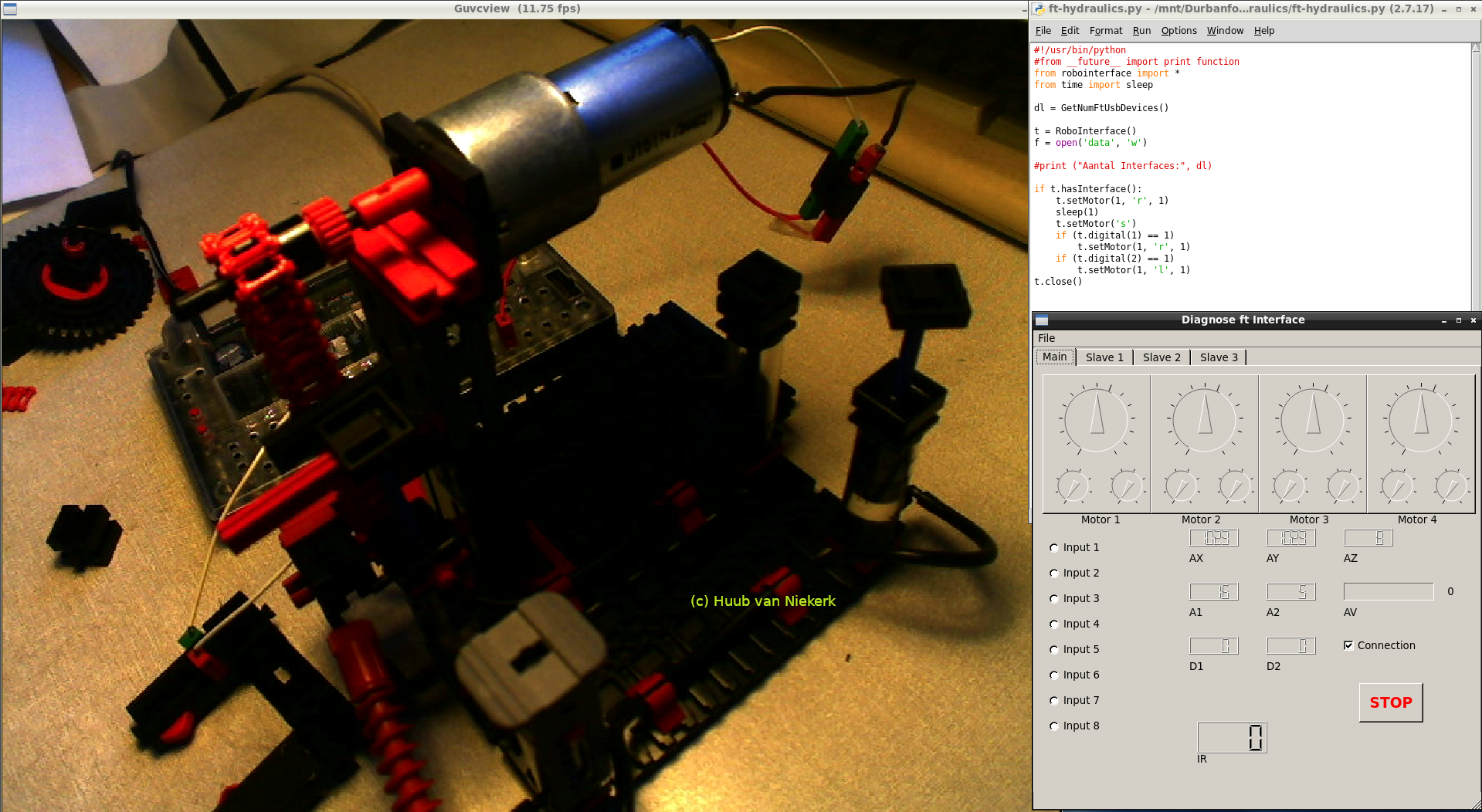
Hydraulics: Focus is on the reconstruction and replacement of motor, setup and chain. Will this work? What about Python? Click the image to watch the video.
Discovery: Can I run my Python code on the default firmware? Now that I know how to access with ssh, it's a matter of copy and run. Or is it? Click the image to watch the video.
Hand: First focus is the hand: after last time, does it work electrically and pneumatically? Then, focus to the wrist. While checking, an oops happens and an observation shows it needs improvement. Considering the upcoming convention in Germany (6 March), after ending the recording, I decided to fix the oops directly anyway. Click the image to watch the video.
21 February Blog 362
ESP32: Focus is again on the event microphone. It still needs to get wired and programmed. But will it work after that? Click the image to watch the video.
Mirft2: ssh, firmware setting, date, python version, android camera + motors, Blender3D oops. Click the image to watch the video.
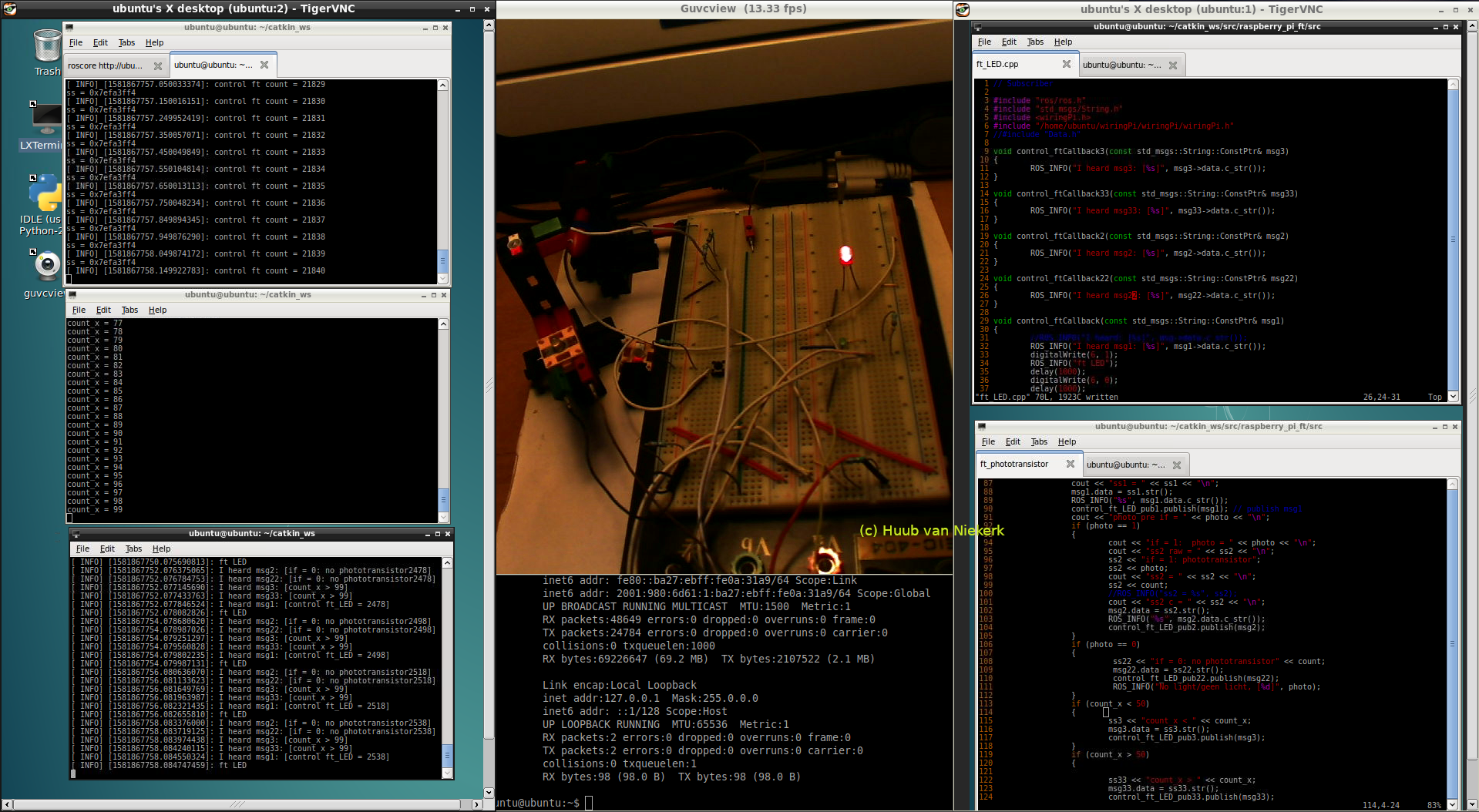
RaspberryPi2 & ROS: Focus is again on the messages: what's wrong and why? Deciding to add messages and see what happens. Result start with oops. But then? Click the image to watch the video.
14 February Blog 361
Hydraulics: Replacement of the motor and wiring. Then reconstruction of the gears and chain, but how to connect it all? Adding switches and coming up with a new idea. Adaptation of the Python code. Click the image to watch the video.
Discovery: Reconstruction of hindwheel, testing batterycell for retaining date, Android for testing hindwheel, Blender3d for measuring and making block. Click the image to watch the video.
Photo's & compilation video fischertechnik convention in Lutjebroek: see Events page.
7 February Blog 360
RaspberryPi3 & PiXtend: Focus is again on the signal strength and voltage level of the digital output. After a power oops, changing settings on the oscillscope brings clarity. But why is it that voltage anyway? Click the image to watch the video.
Mirft2: Checking the memory batterycell and replacing it. Then: testing camera, WLAN using RoboPro and setting the date with a reboot. Finishing with Blender3D. Click the image to watch the video.
BeagleBoard & rollertrack: Focus is on the expansion of the conveyor belt. Will making it longer help getting the bullets to the end? And some strange behaviour of the course selector...which is quickly resolved. Click the image to watch the video.
31 January Blog 359
ESP32: Focus is on the microphone and LED, but how do I attach them? Remove the keypad completely? What about the motors? How to test the fischertechnik one? Click the image to watch the video.
Discovery: Coninuing with the WLAN, I find that the memory-batterycell is still 3V. Replaced anyway, what will happen now? I'm in for a few surprises, but do I like them? Then a new start with Blender3D: measuring and resizing. What will it bring? Click the image to watch the video.
Hand: Continuing with the stabilization (for transport) improvement, then an overall test. Resulting in rewiring and (re)finding a wiring issue that really needs a fix. But how? Click the image to watch the video.
24 January Blog 358
Hydraulics: Continuing with the motor and gear: I need to reconstruct to make it run slower. Will that work out? Click the image to watch the video.
Mirft2: Going further with Wifi: how do the settings do? This comes with a result I don't really like. But will have to deal with it anyway. To keep the video-length within limits, no time for Blender. Click the image to watch the video.
Arduino: For patrons only, until when? That'd be 27-03-2020.
RaspberryPi2 & ROS: Focus is to split the counting, but Murphy shows up again. So deciding to a small code change, also introducing a flash light. But what's the result? Click the image to watch the video.
17 January Blog357
RaspberryPi3 & PiXtend: After last time, I'm curious about the input voltages at the digital port. This brings some doubts about the settings of the oscilloscope, although 5V = 5V. So what's up and why? Click the image to watch the video.
Discovery: Trying to do with a batterypack before AC. Then, can I operate the joysticks better now? Which comes with a surprise. Then I find I have to start over with Blender...which is maybe for the better. A test with Python runs nice, but how about RoboPro? Click the image to watch the video.
BeagleBoard & rollertrack: Focus is on the upside-down conveyor belt idea to transport a bullet/marble. How can it work? Wiring has to be adapted, but what else? How long is it or should it be? Click the image to watch the video.
10 January Blog 356
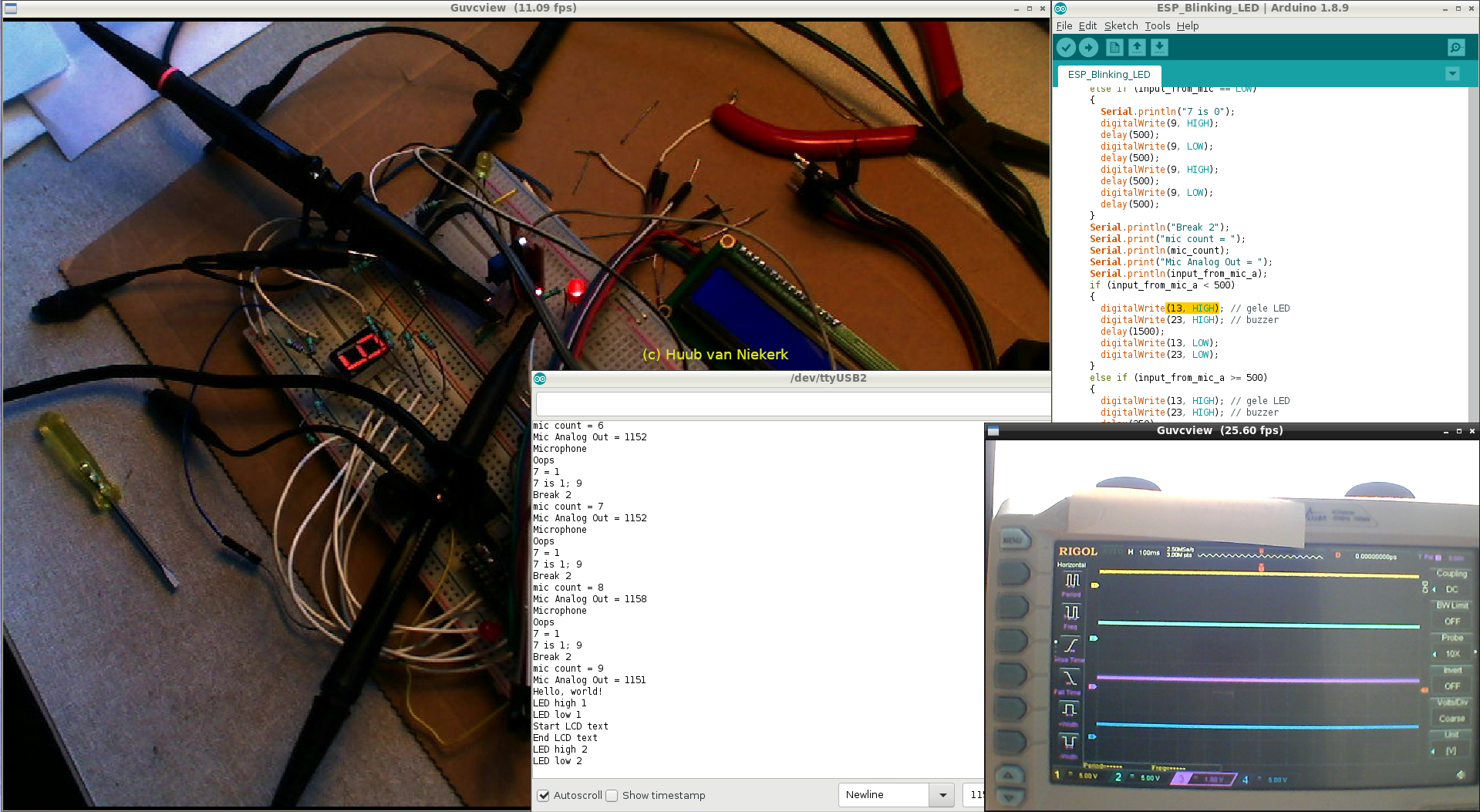
ESP32: Focus is once again on the motor: minding the wiring and trying to measure the pulsewidthmodulation signals on the oscilloscope. What's up with those signals? And what's up with the code? Click the image to watch the video.
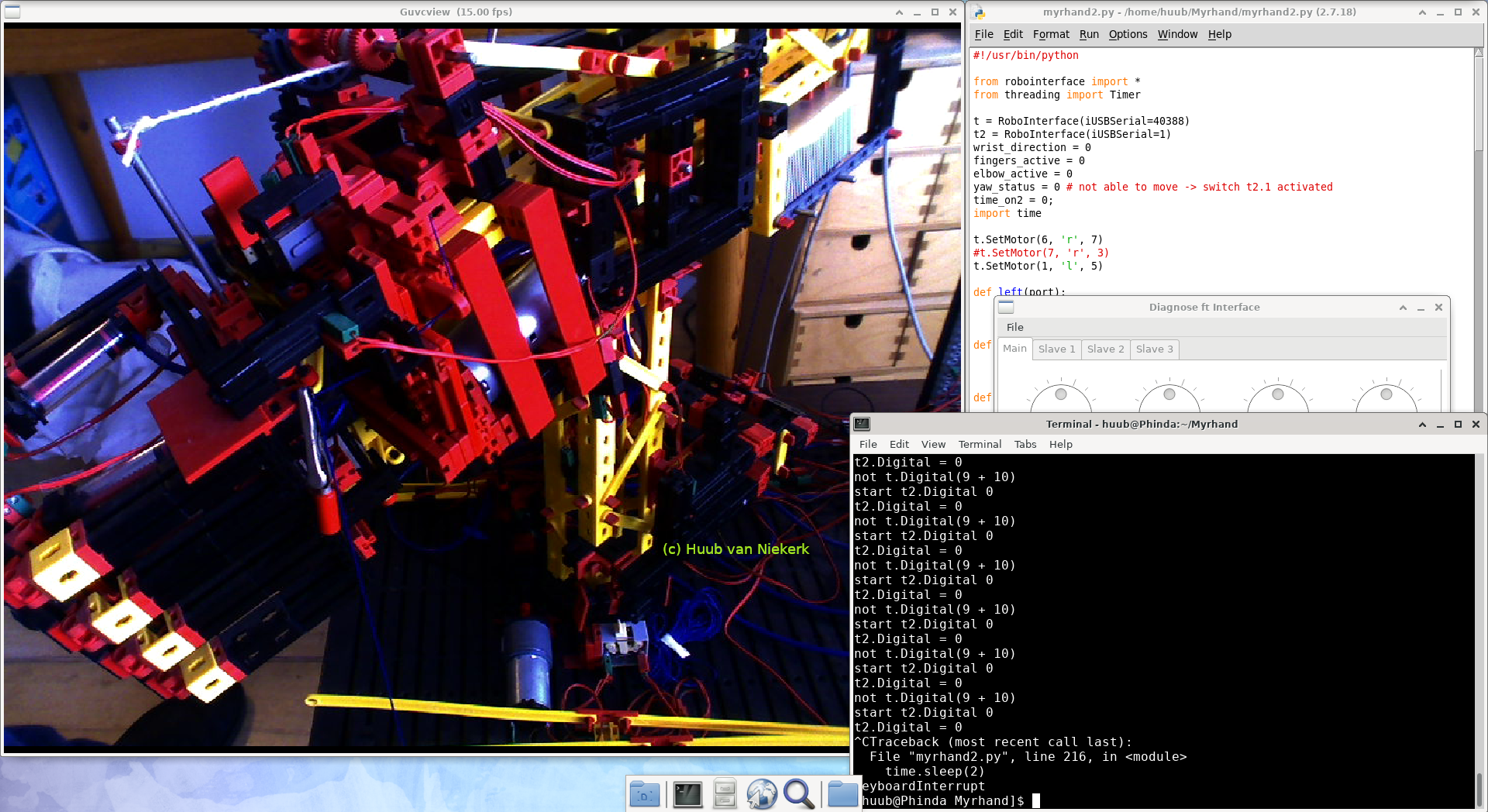
Mirft2: Murphy's Law all over, this time: starting with a few power oopses (battery? wiring?), I finally can focus on copying the code between the 2 firmwares (or can I?). Changing the WLAN settings on the controller gives new ideas, but also weird results. The Android tablet does nice, for a bit. Click the image to watch the video.
Arduino: Until 13 Januari, for patrons only. See my patreon page. With all my Arduino's together, what are the options?
Hand: An observation leads to a modification to a winch. Then a cage for counterweight needs a small adaptation and finally. overdue, an attempt to improve the transportation stability. Click the image to watch the video.
3 January Blog 355
Hydraulics: New tests to make the chain move the hydraulic piston leads to some insights. But does it bring a solution? Click the image to watch the video.
Discovery: Another attempt to get the tablets working with the camera and have RoboPro connected. Another go with Blender3D, with another oops. Click the image to watch the video.
RaspberryPi2 & ROS: Continuing with the message, I try to split the counting. But does it help or does it take more? Some rewiring is necessary to make it all work. Click the image to watch the video.