
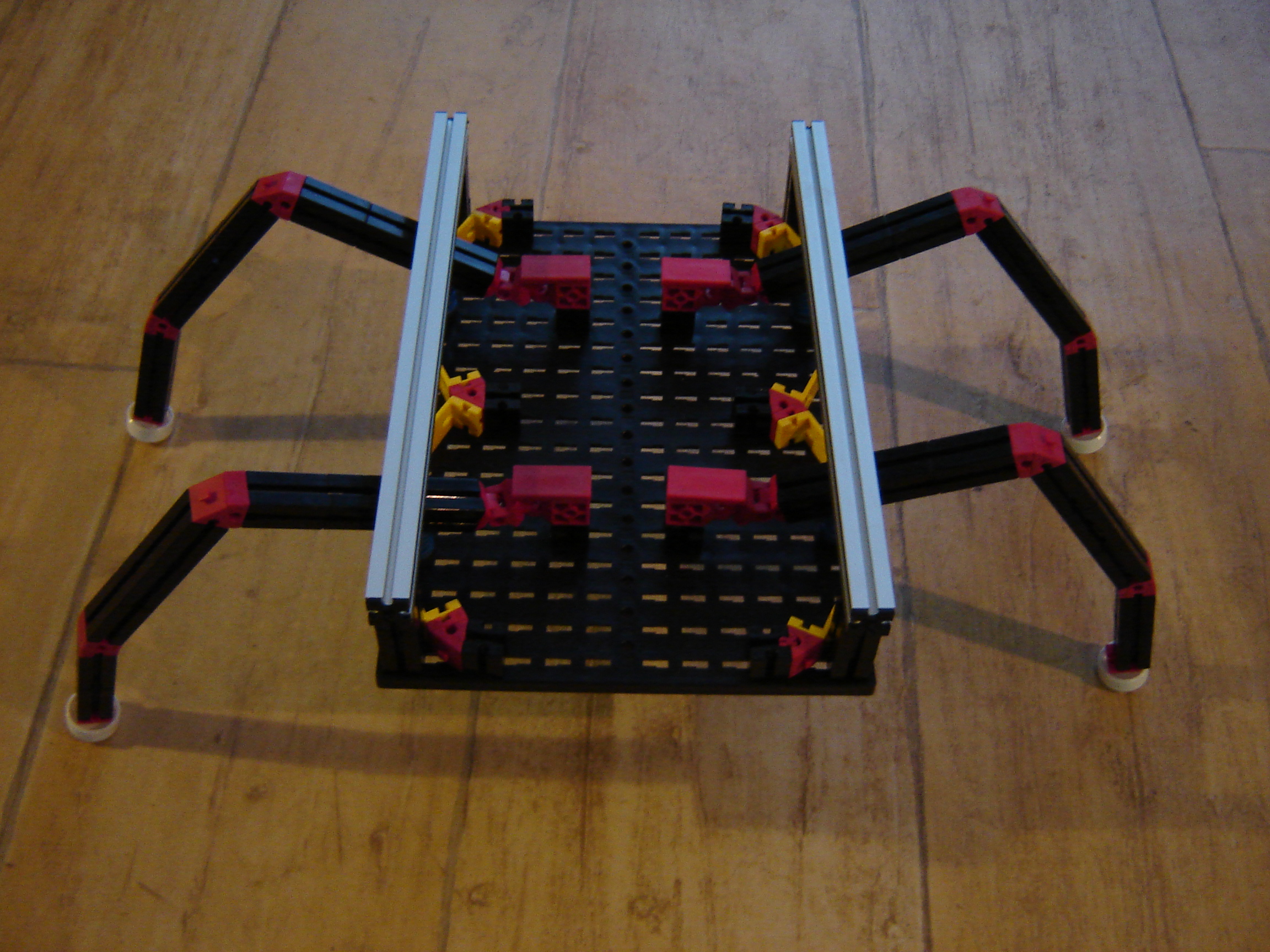
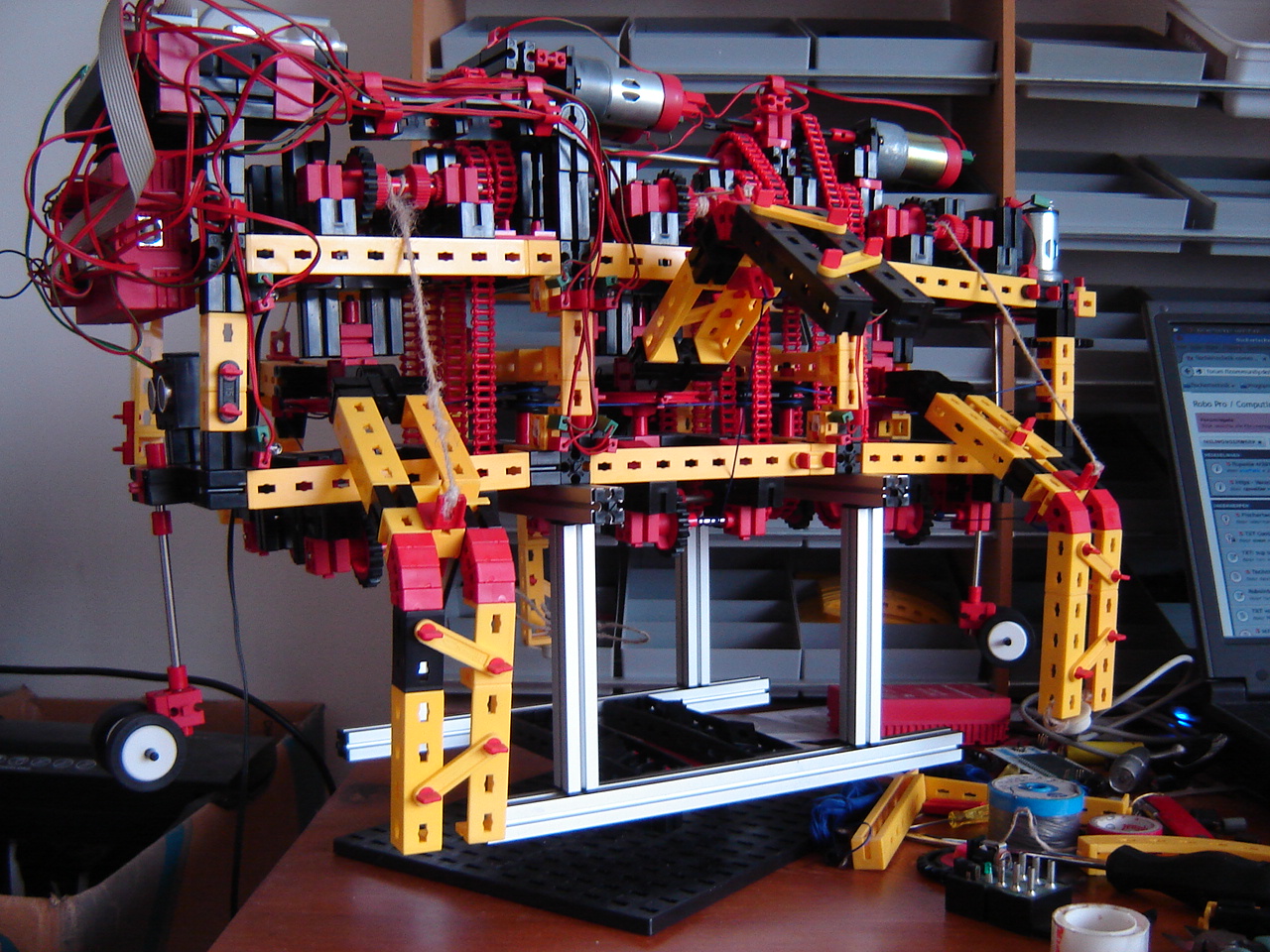
And this is a basic
design showing what the walking robot Mirft could look like.
Picture page of Mirft: My insectoid
robot of fischertechnik. RETIRED
Scroll to bottom for the latest
pictures. On my blog, I weekly tell about my
experiments. Videos can be found at my Youtube
channel. The videos page has links to my playlists on Youtube as
well as event pictures on Flickr.
On this page, the pictures from 5 Feb. 2016 till 20 Apr. 2016
are also links to the respective videos.
And this is a basic
design showing what the walking robot Mirft could look like.
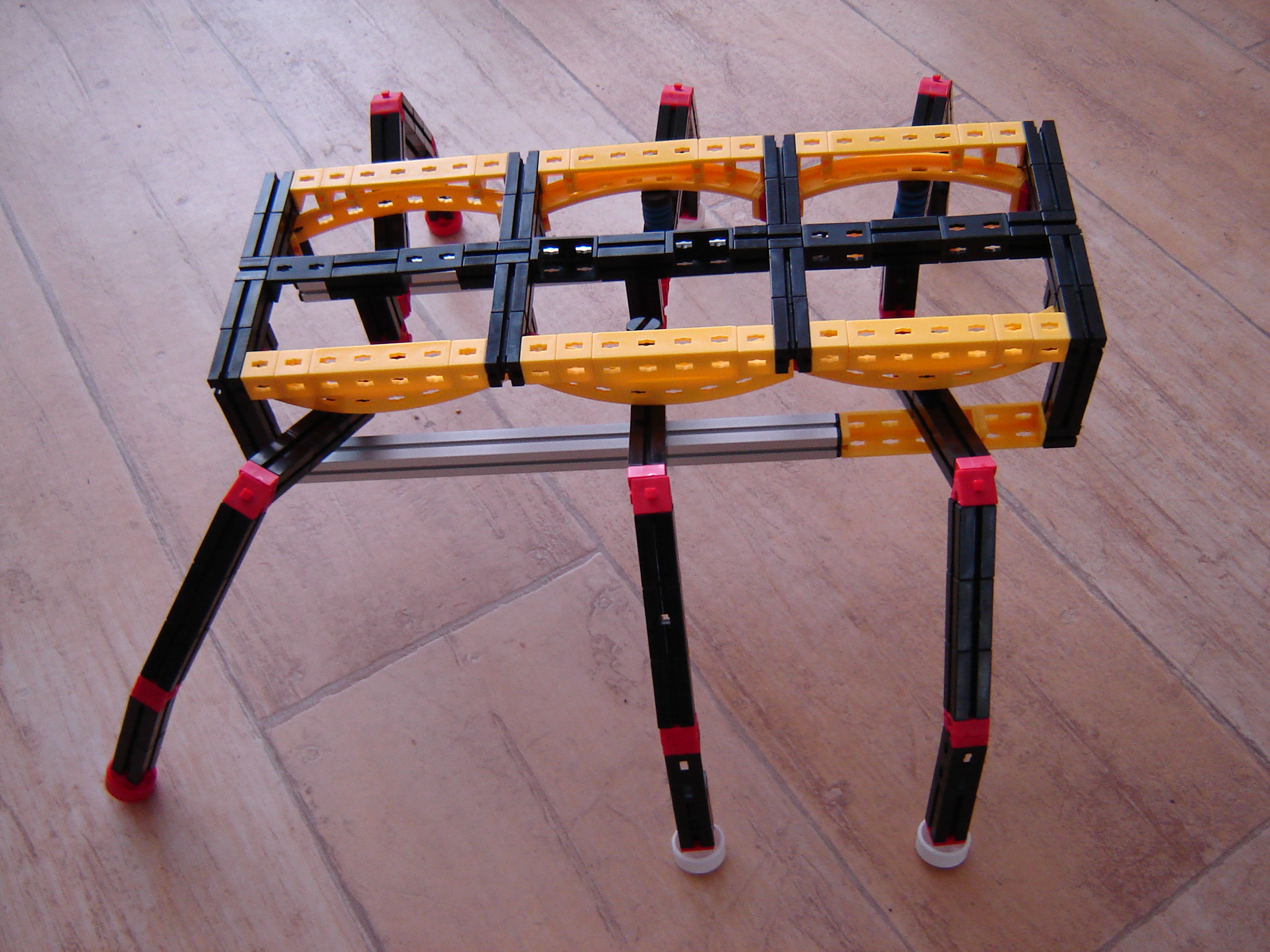
The same design, with
a little adaption to keep the legs from going too much astray..
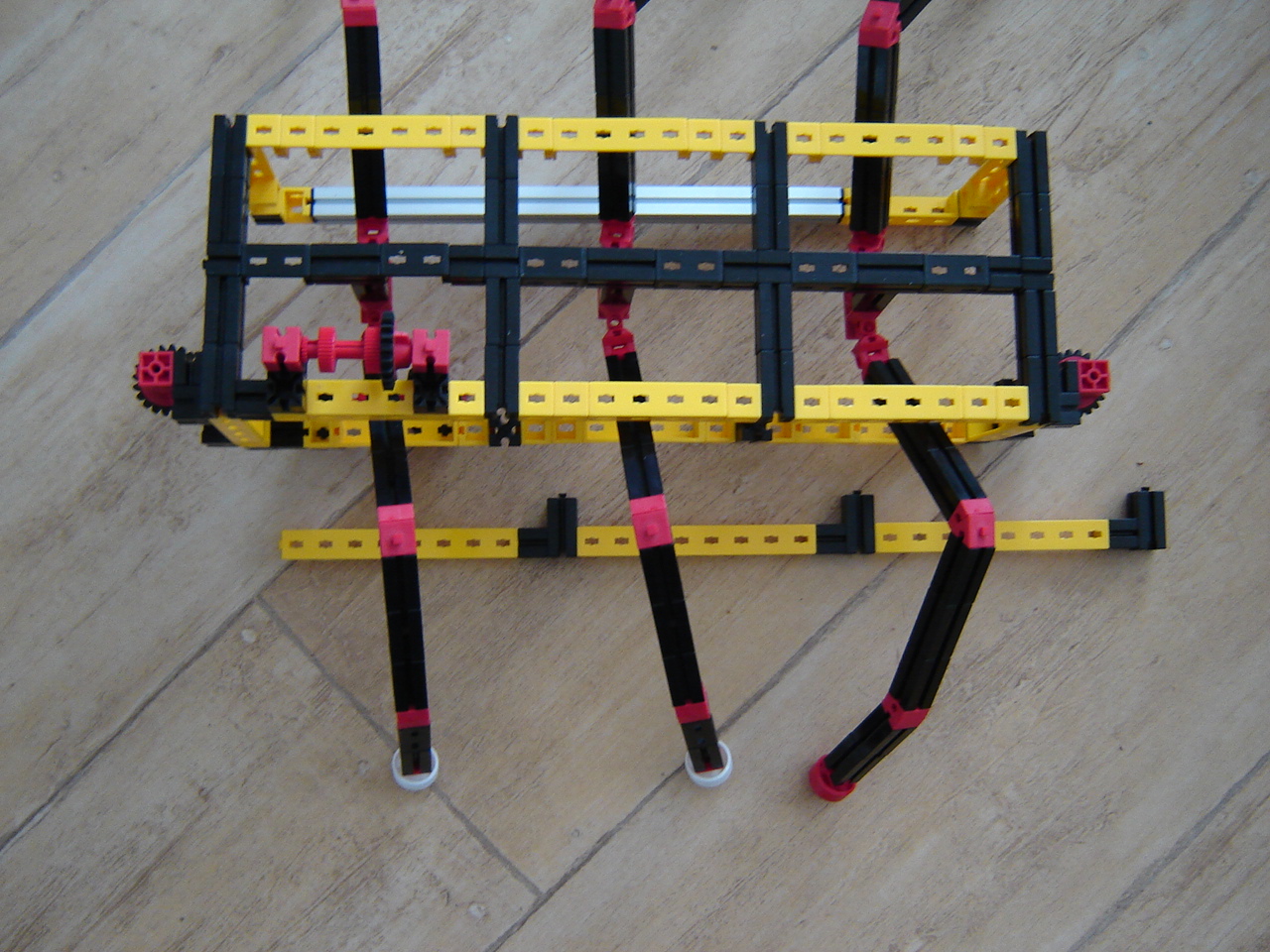
Because of
stability problems and mechanical issues, I had to make a
complete redesign of the robot. This resulted in a framework
with a different suspension of the legs.
Because of a
change in the design of the gearing the total design has to be
changed: the aluminium parts are being replaced by angle
girders so the building blocks can be attached. By this, the
robot will be automatica
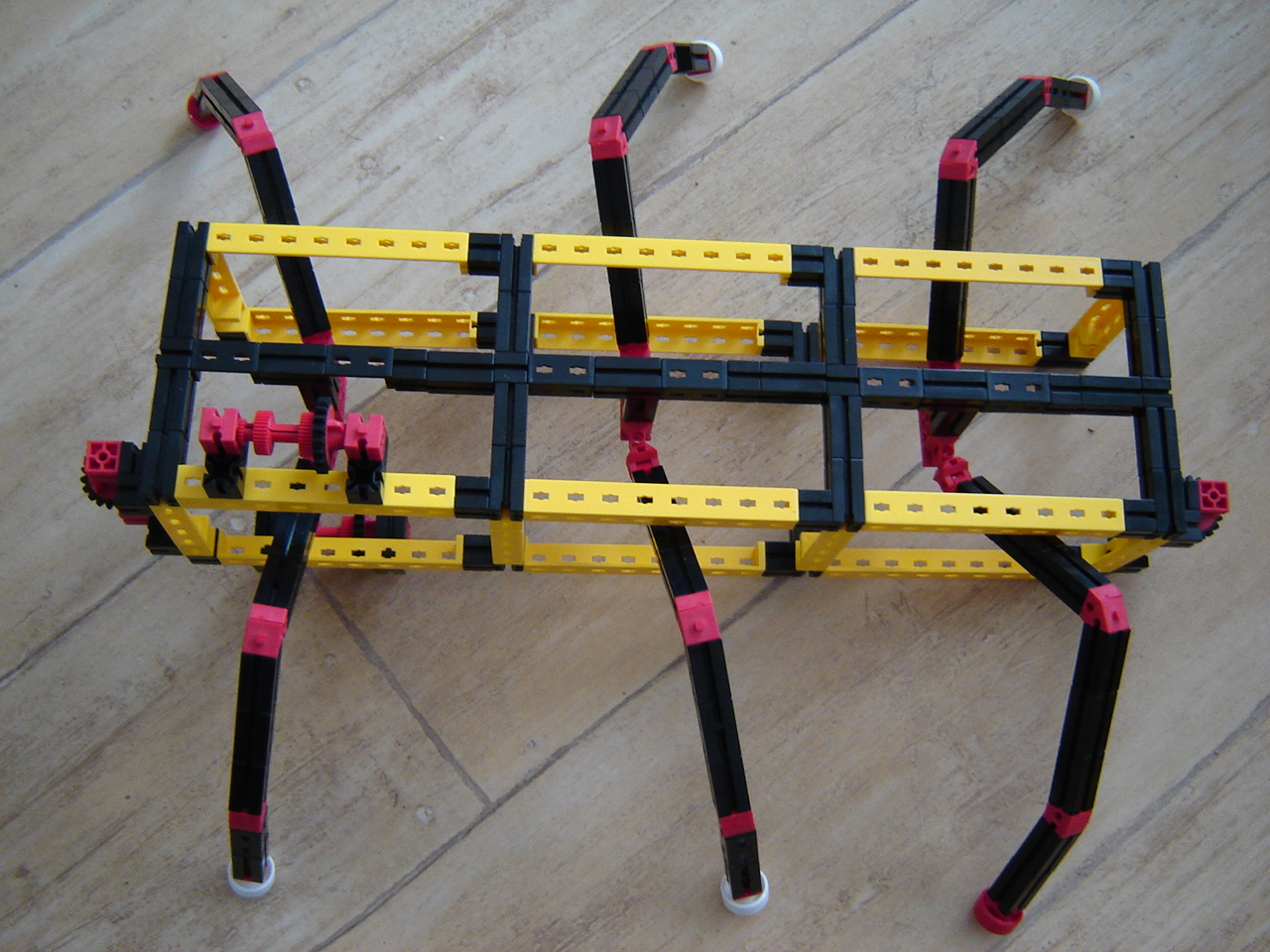
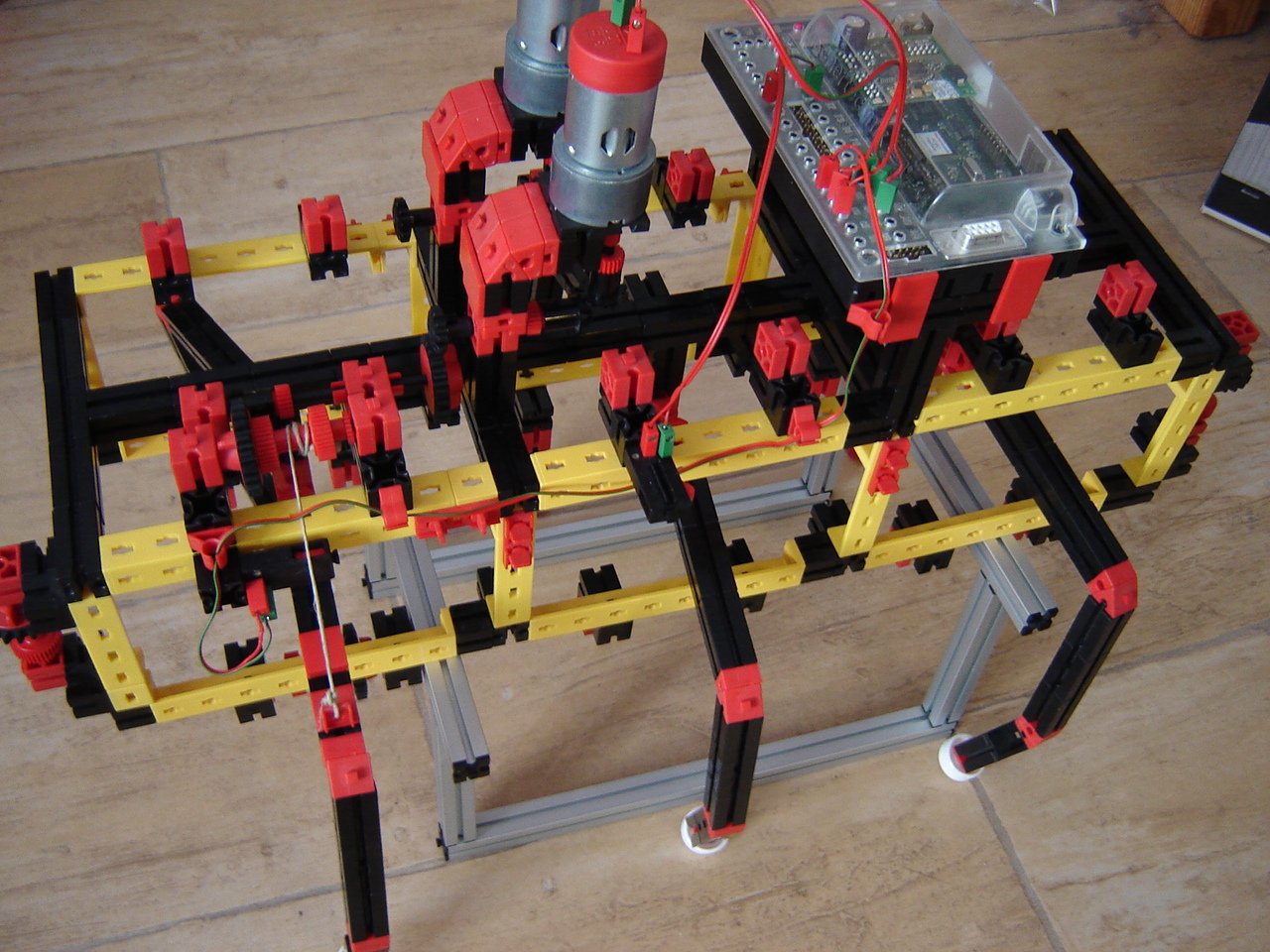
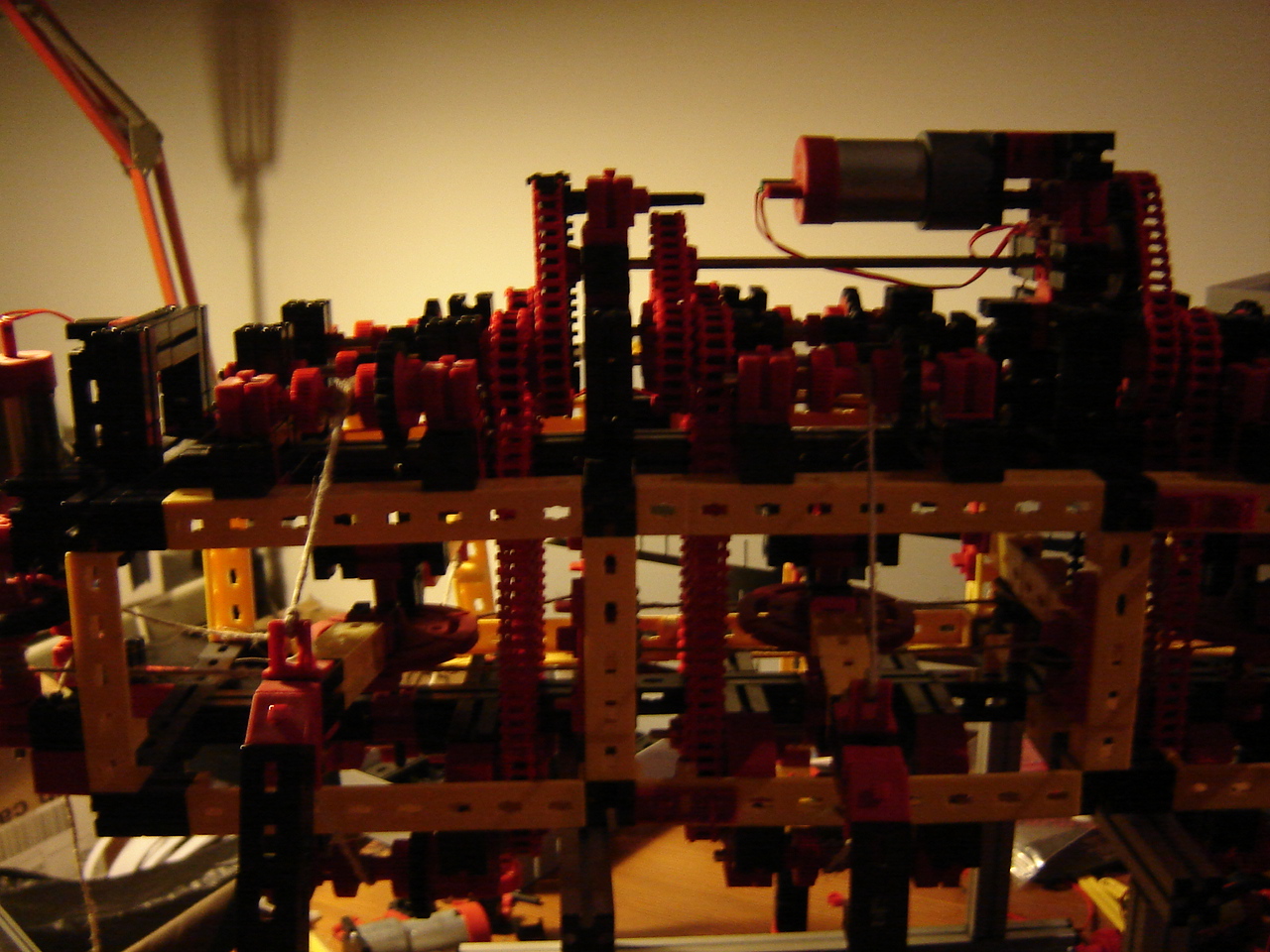
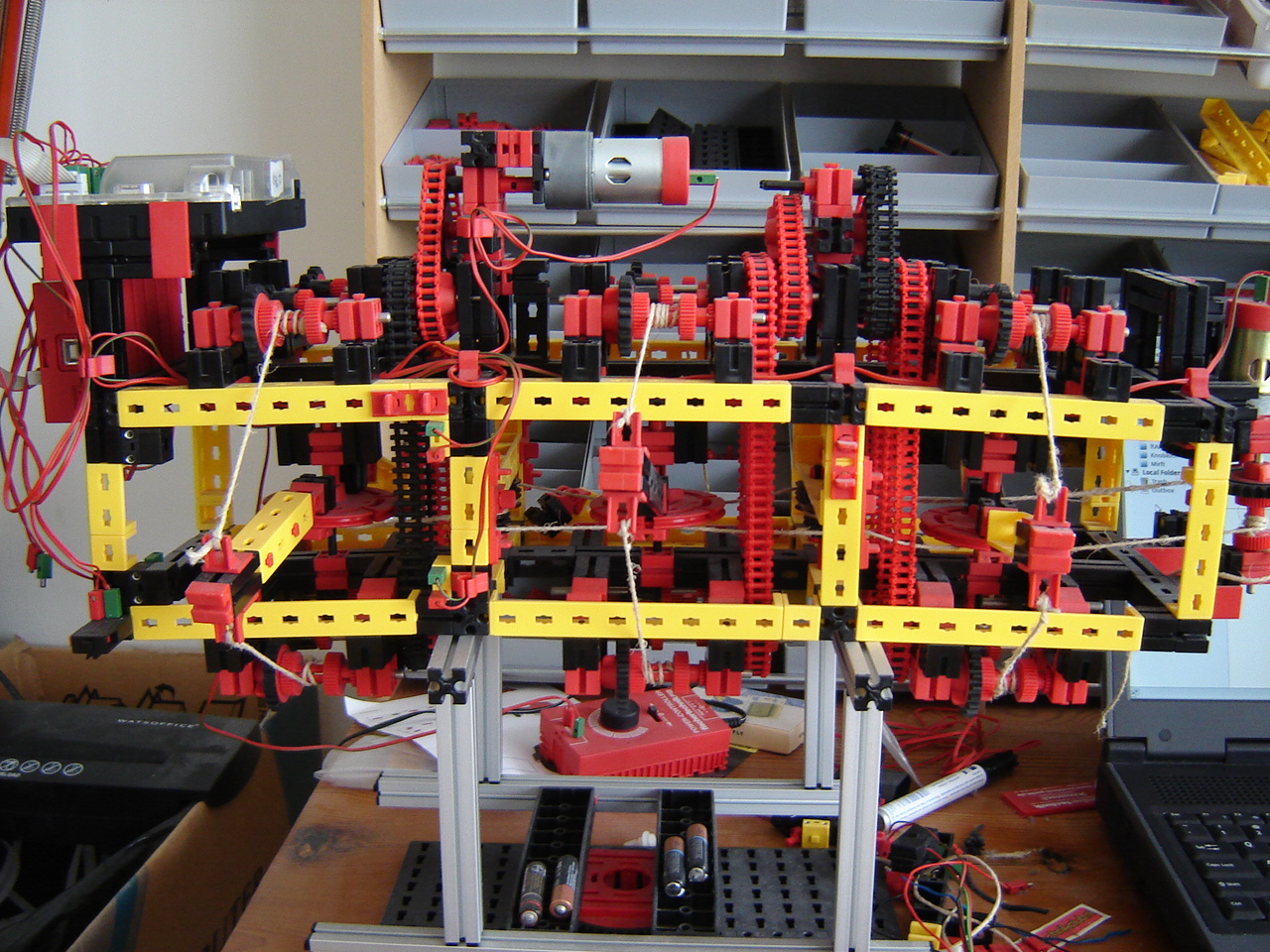
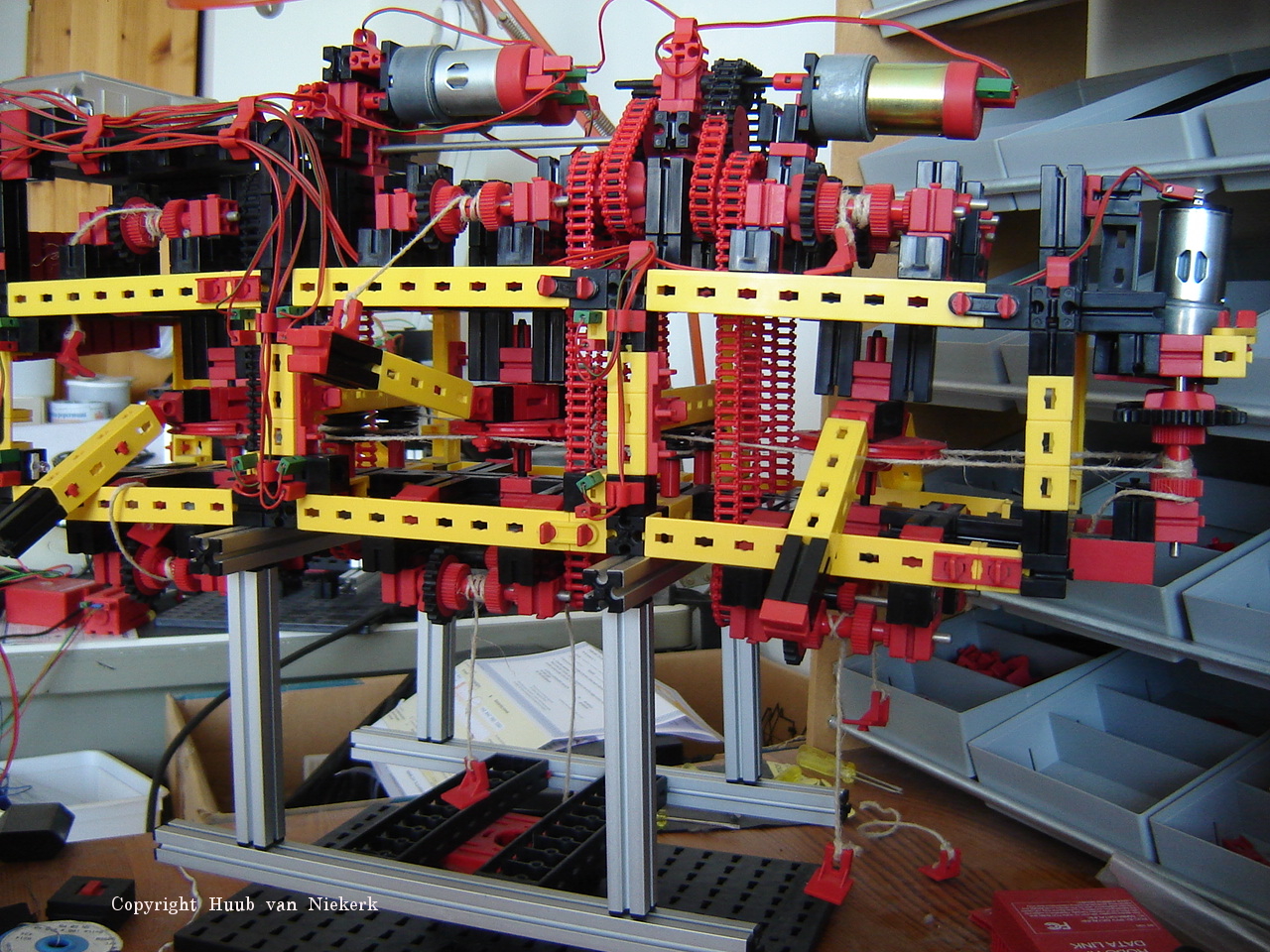
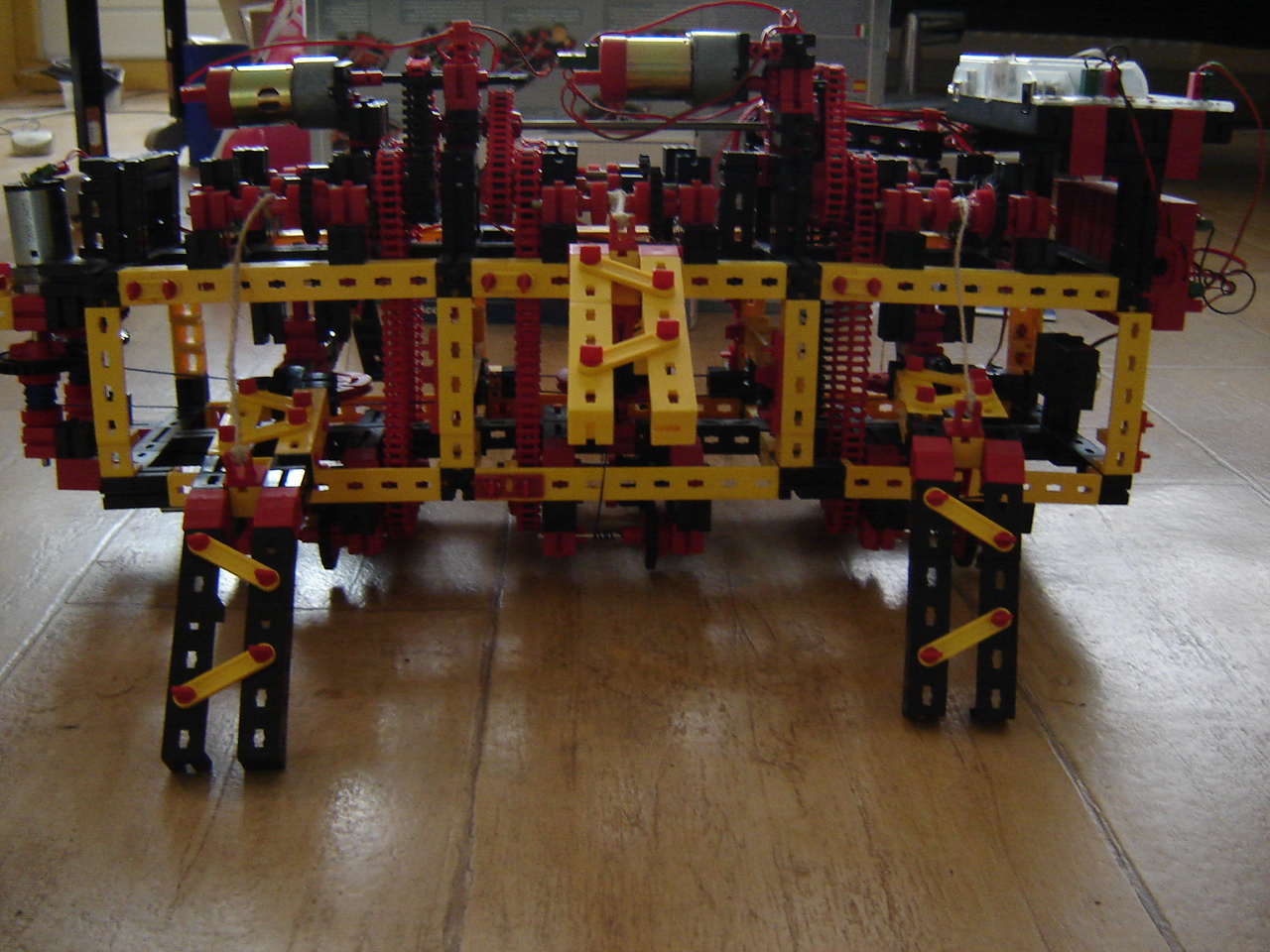
Result: an
enlarged robot.
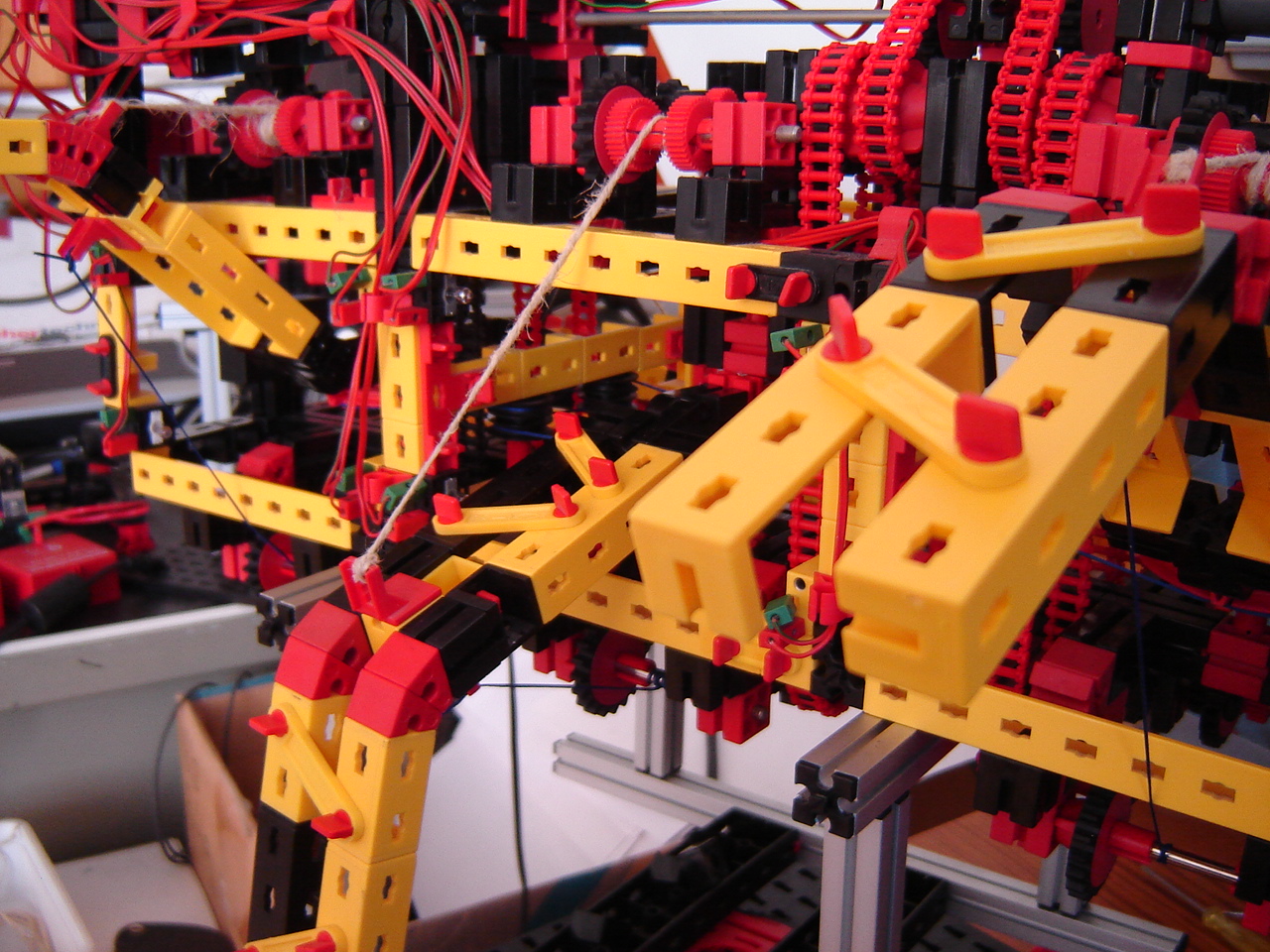
And with some
gearing, though not connected to the legs yet. This is quite a
challenge.

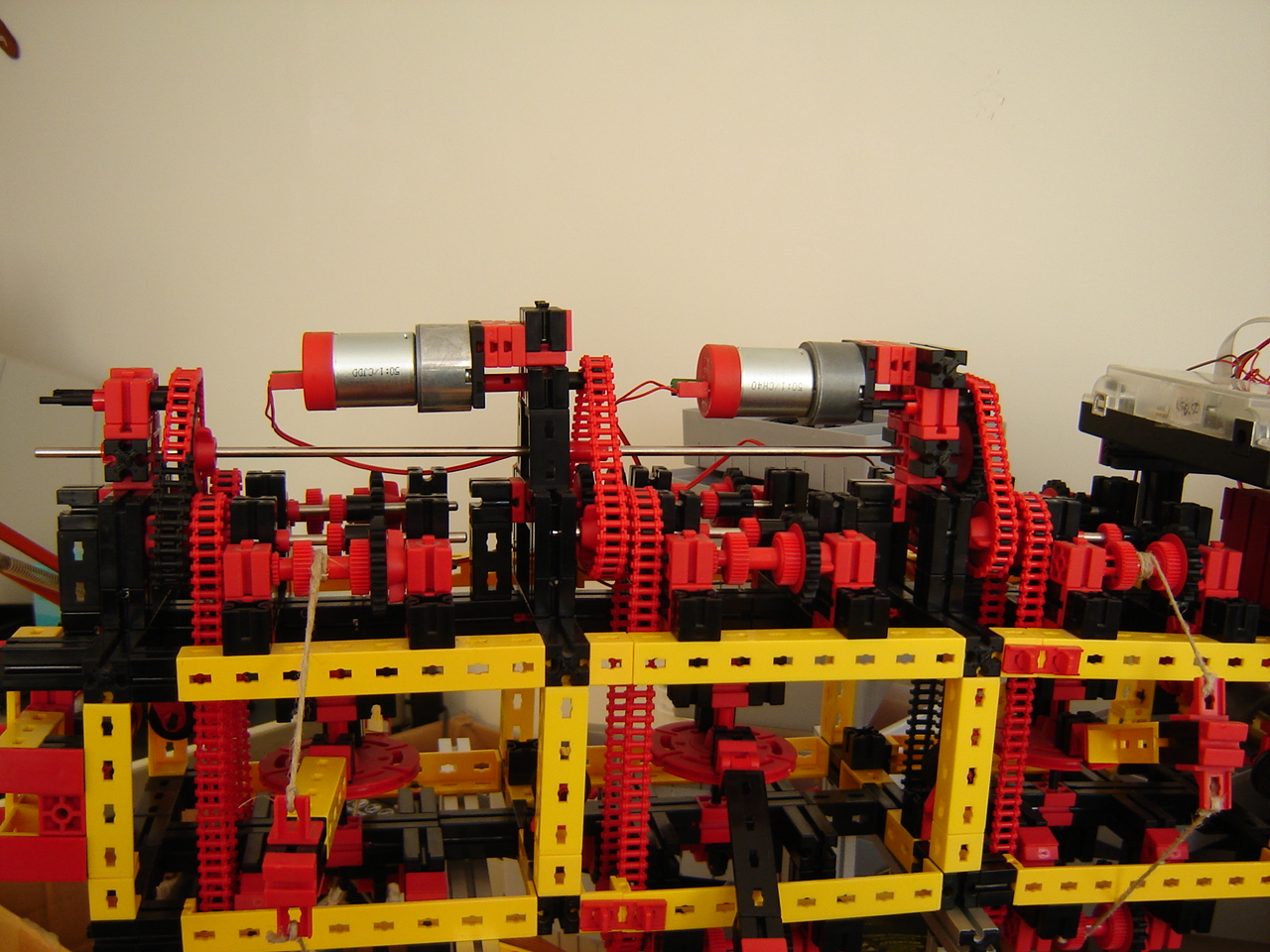
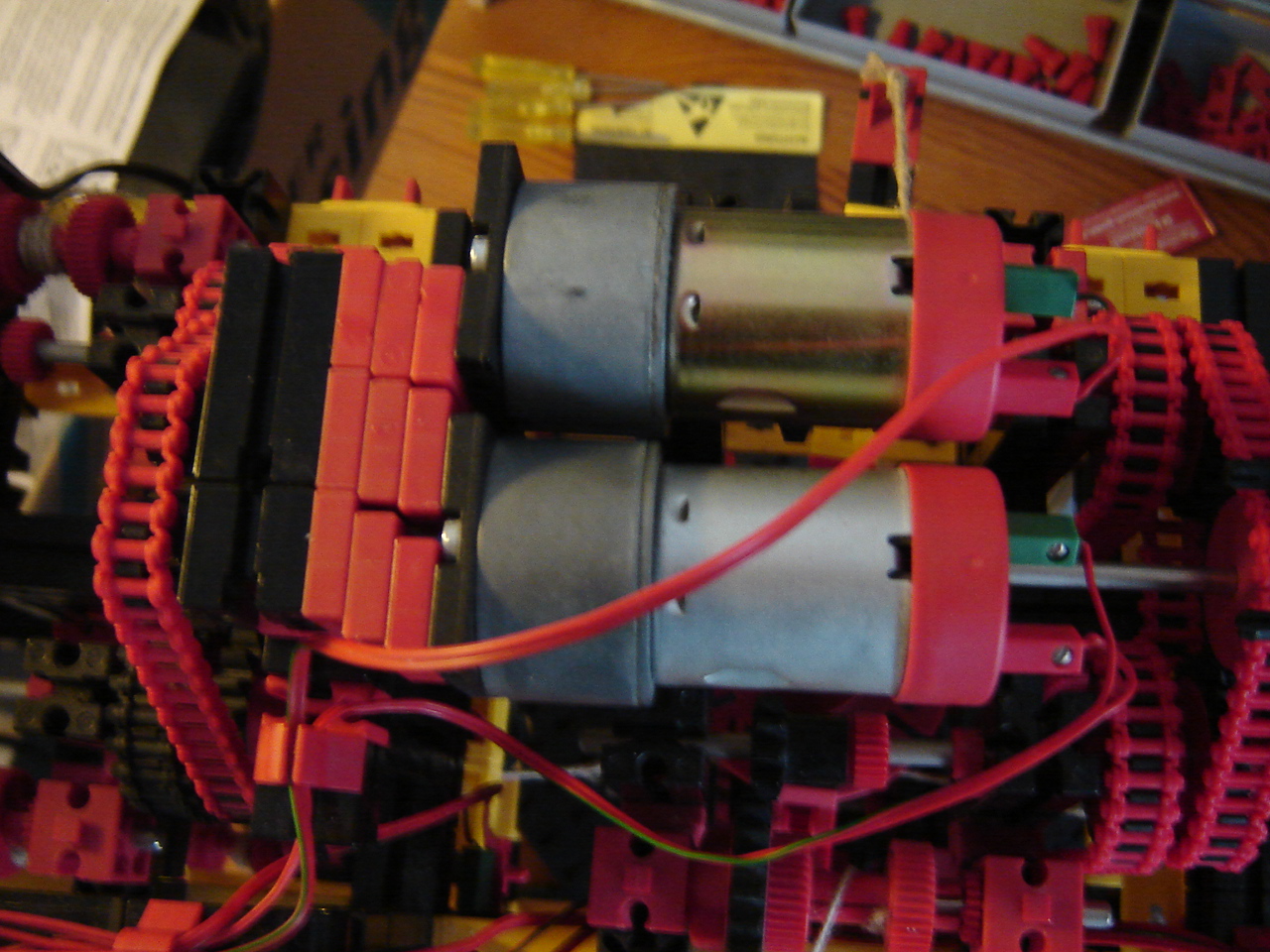
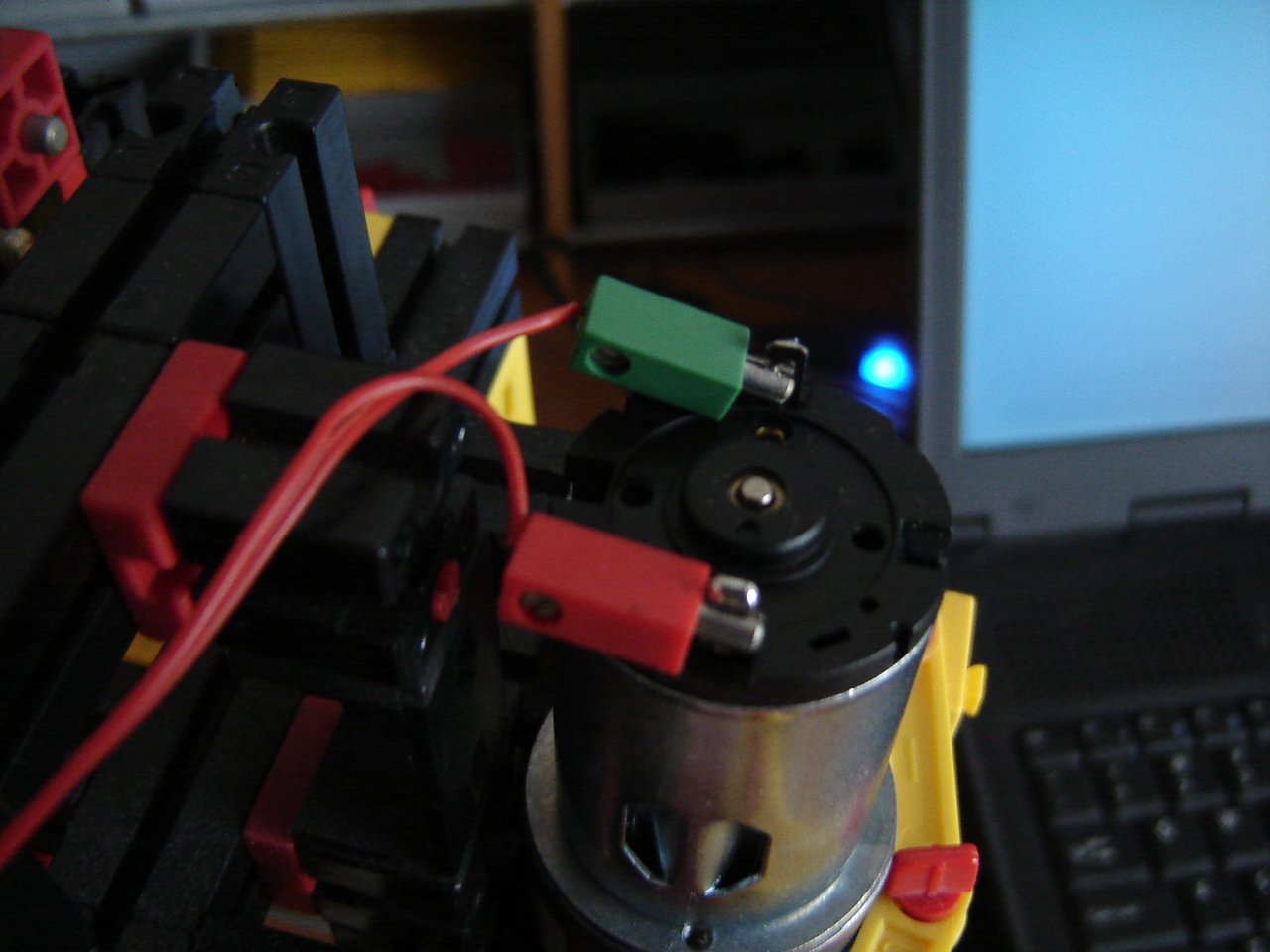
July 2010:
2nd motor removed, changed motorsetup
July 2010
July 2010
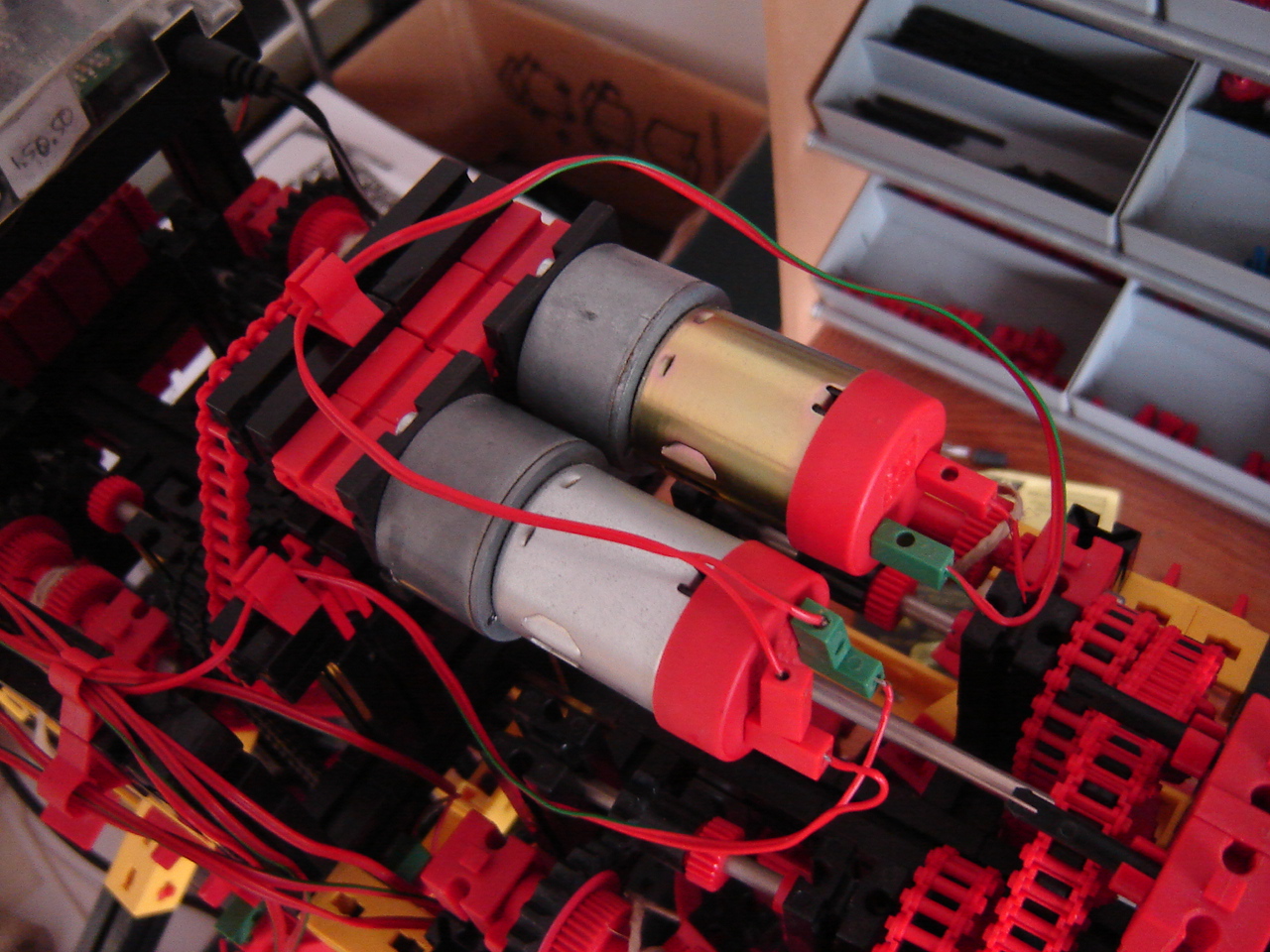
Expansion
with a 2nd motor, changed motorsetup
July 2010
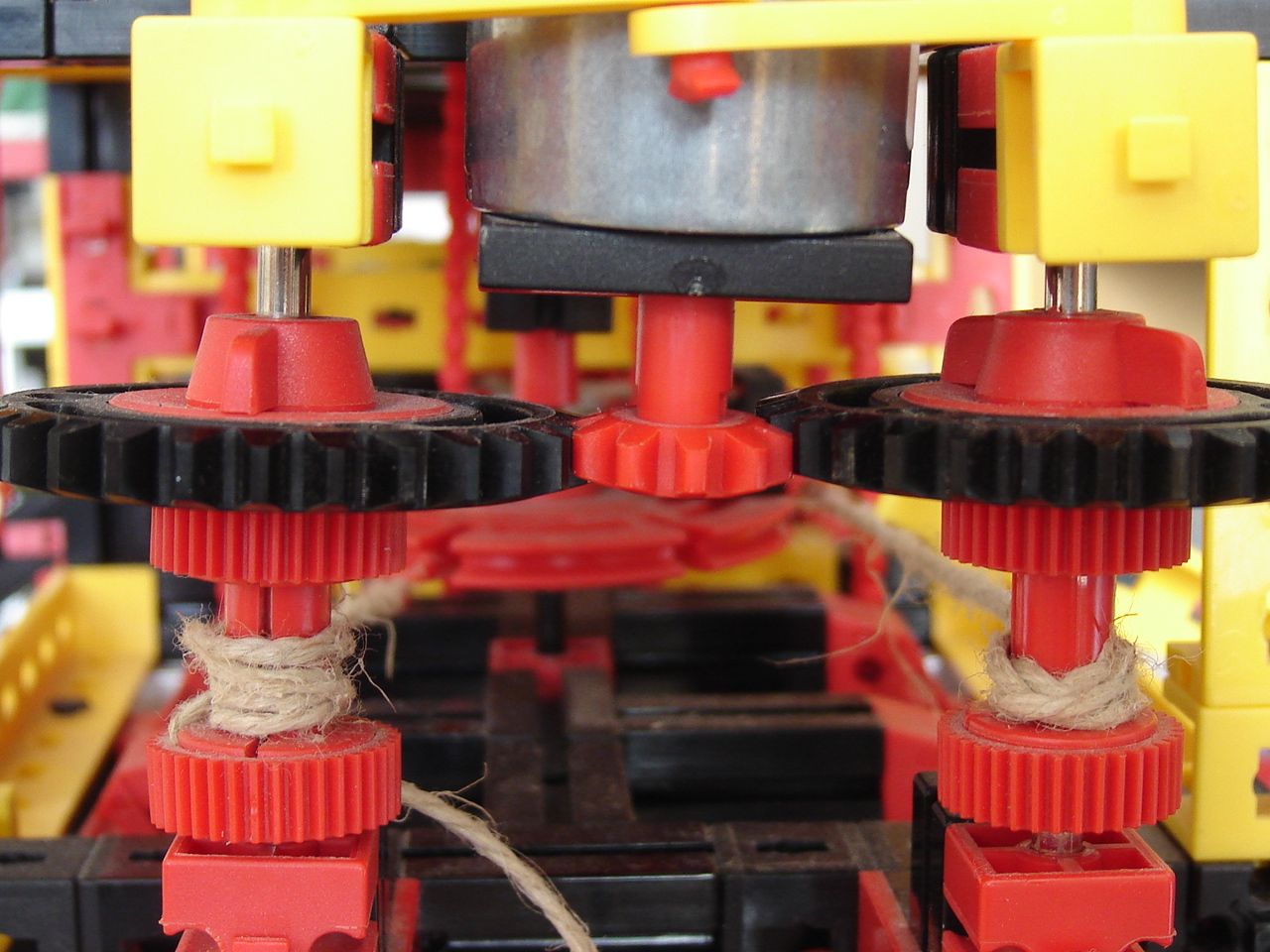
July 2010 –
2nd series
July 2010 –
2nd series
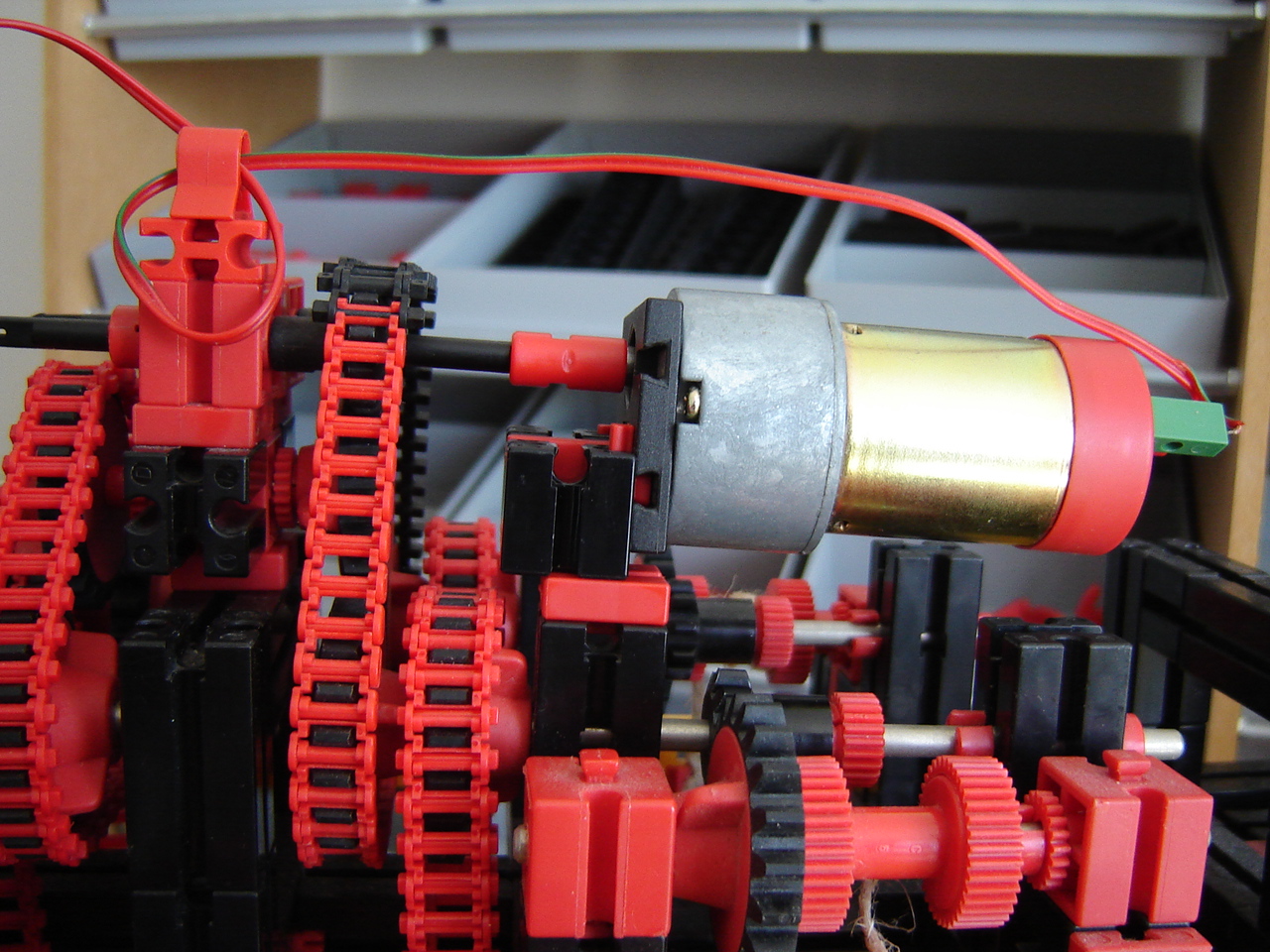
July 2010 –
2nd series
July 2010 –
2nd series

17 August 2010
17 August 2010
17 August 2010
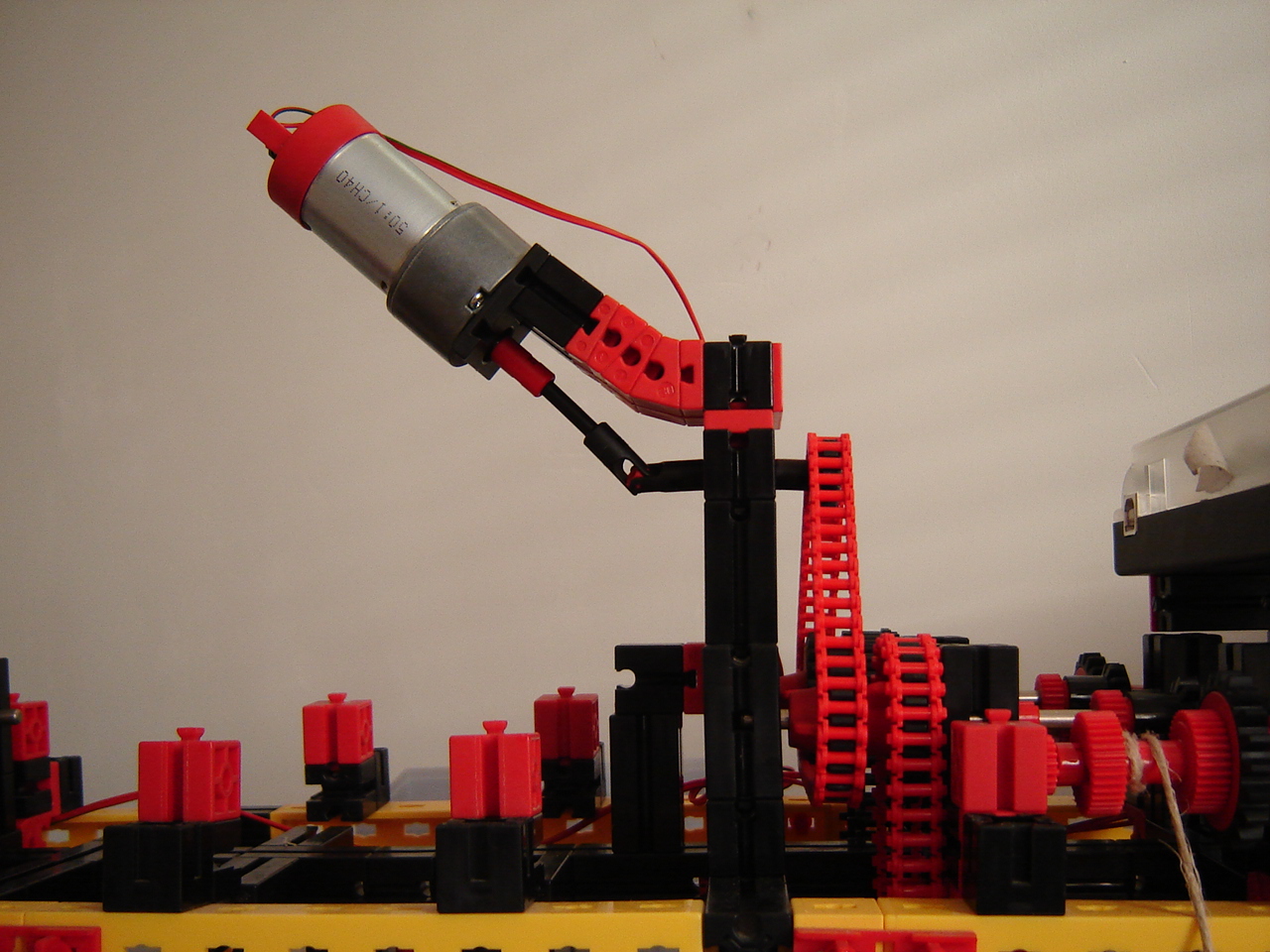
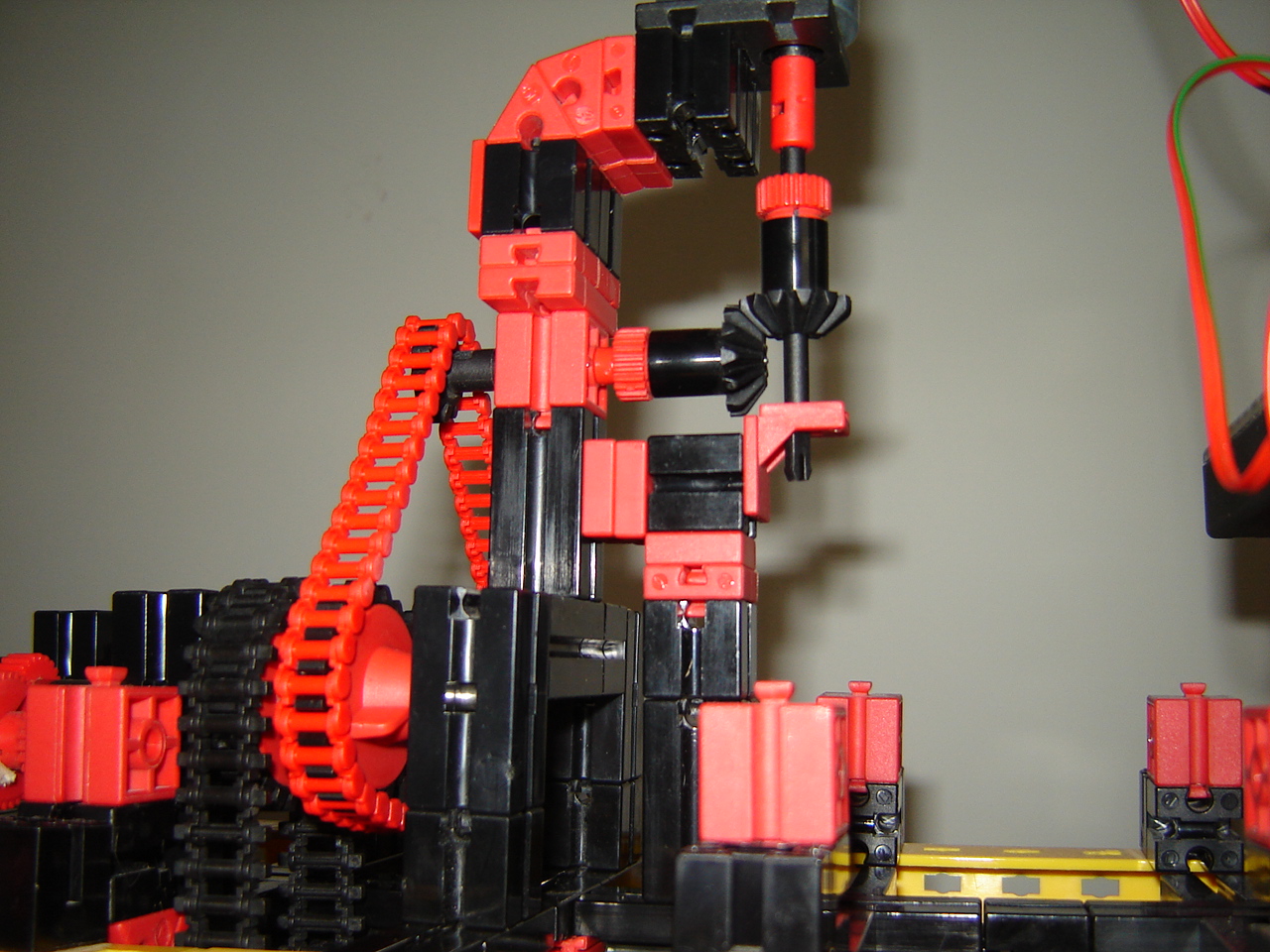
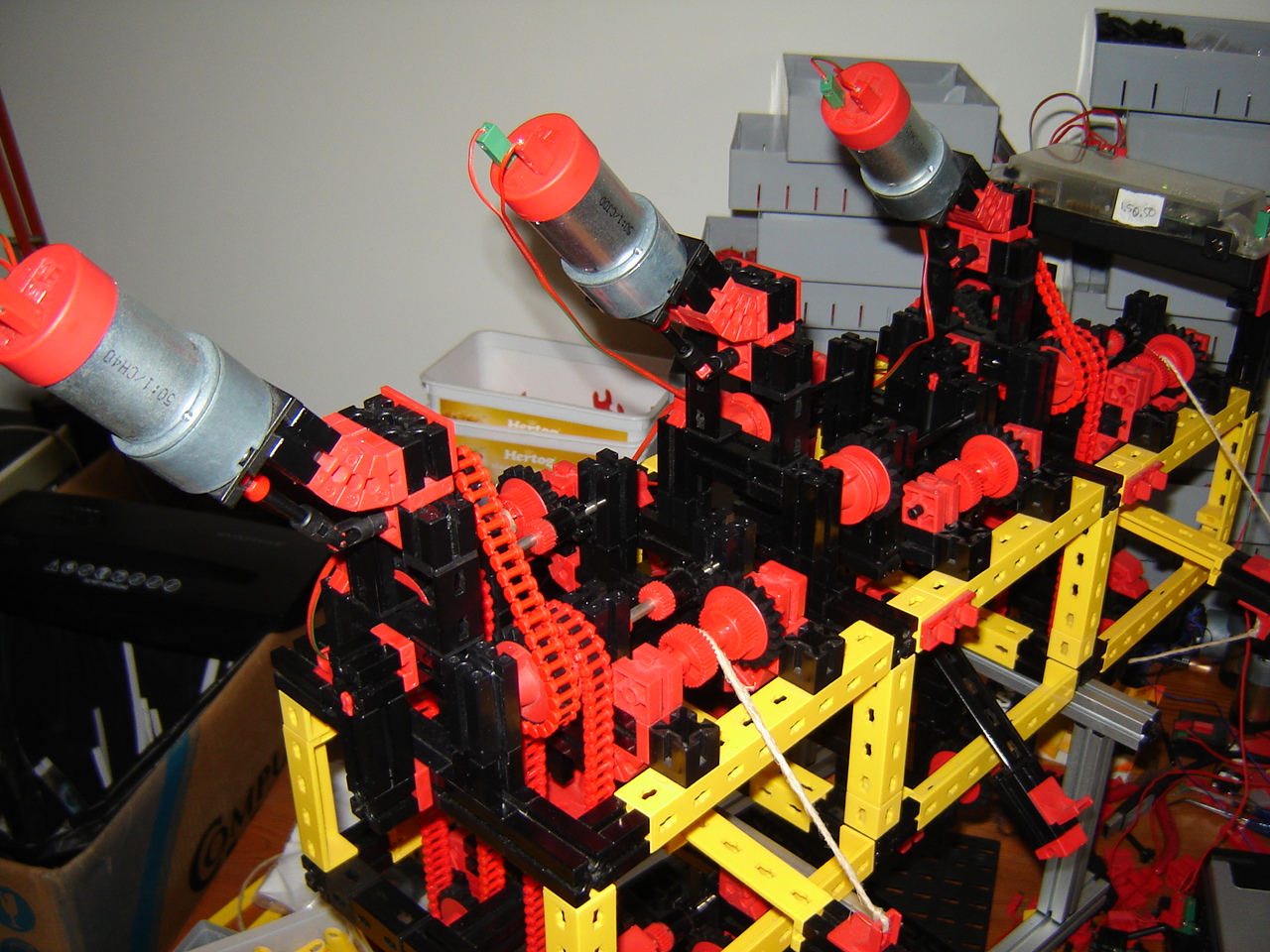
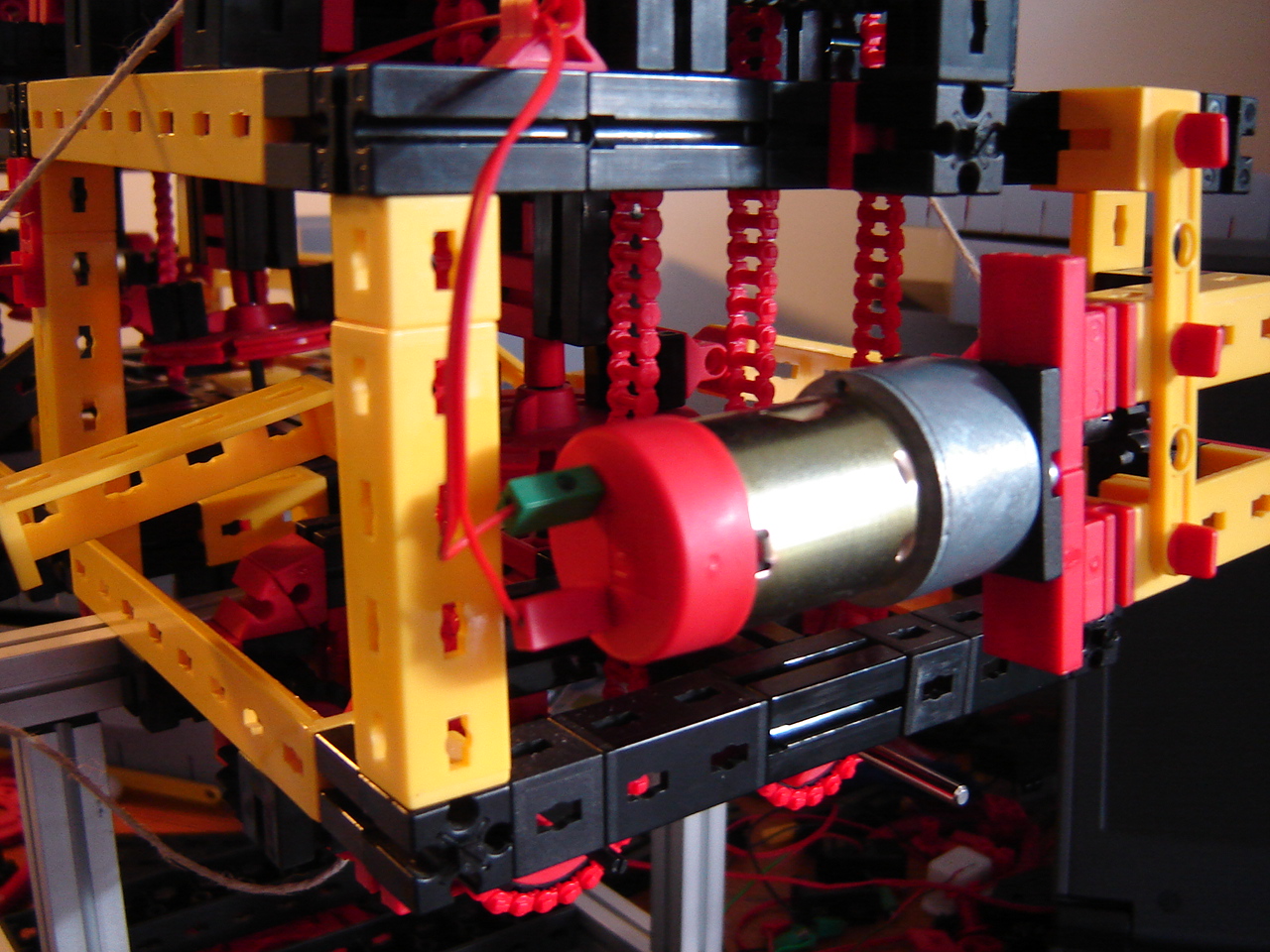
24 October
2010: replaced the failure prone axial motor setup to this
angular one with a cardan joint.

24 Oktober 2010
28 October
2010: finally added the 3rd (middle) motor; unfortunat

28 Oktober 2010
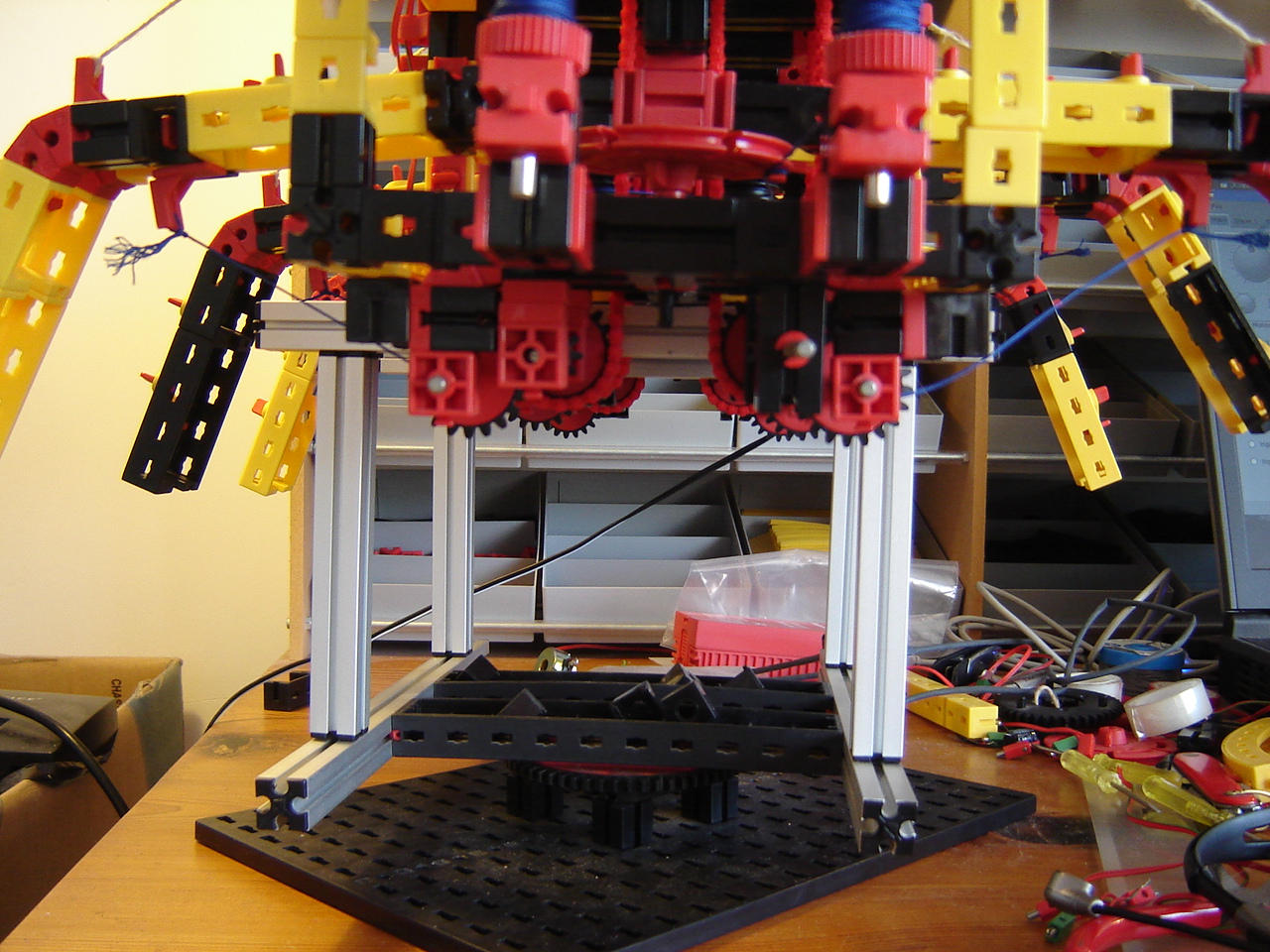
7 November
2010: due to continuous dislocatio
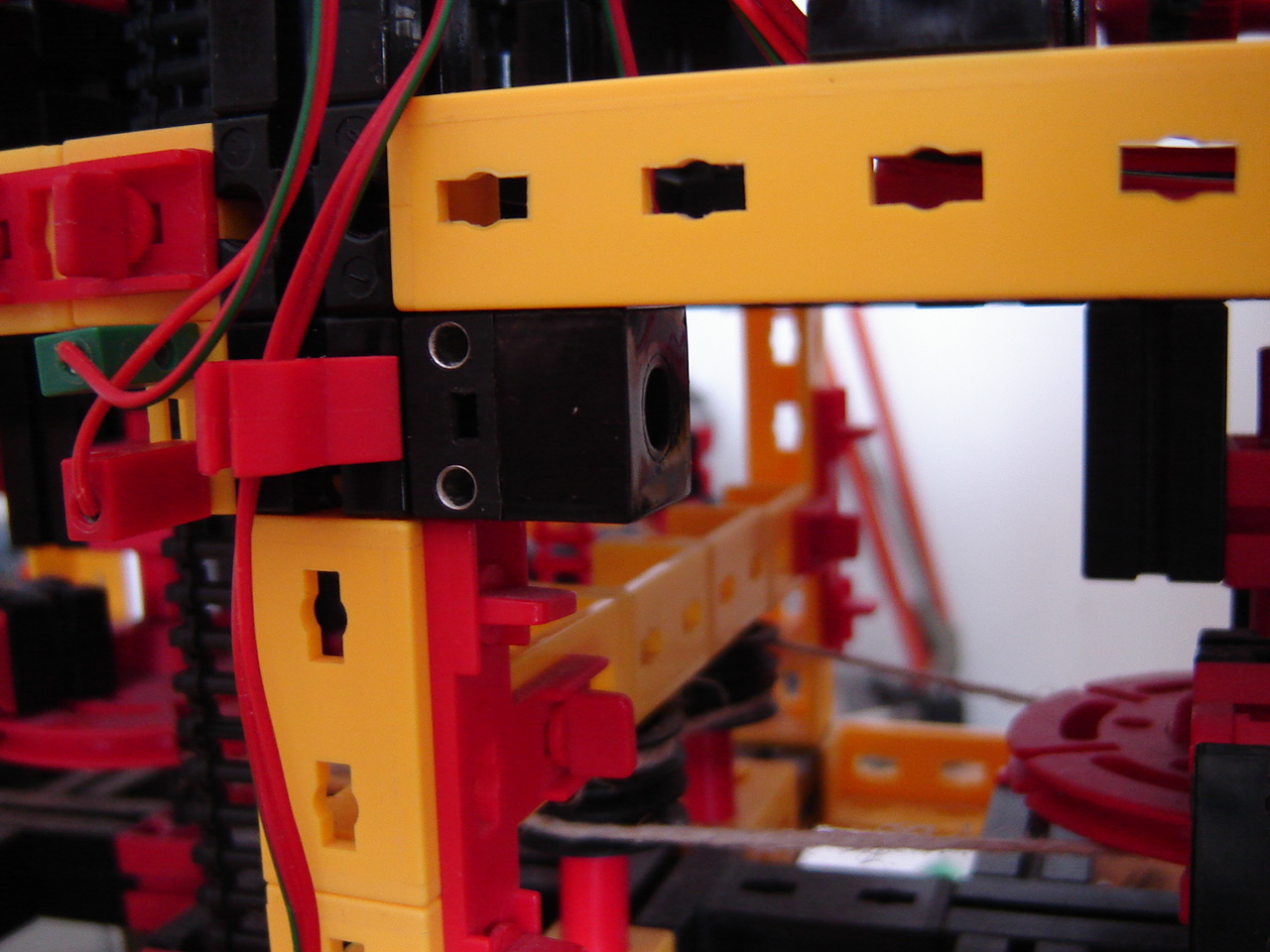
77 November
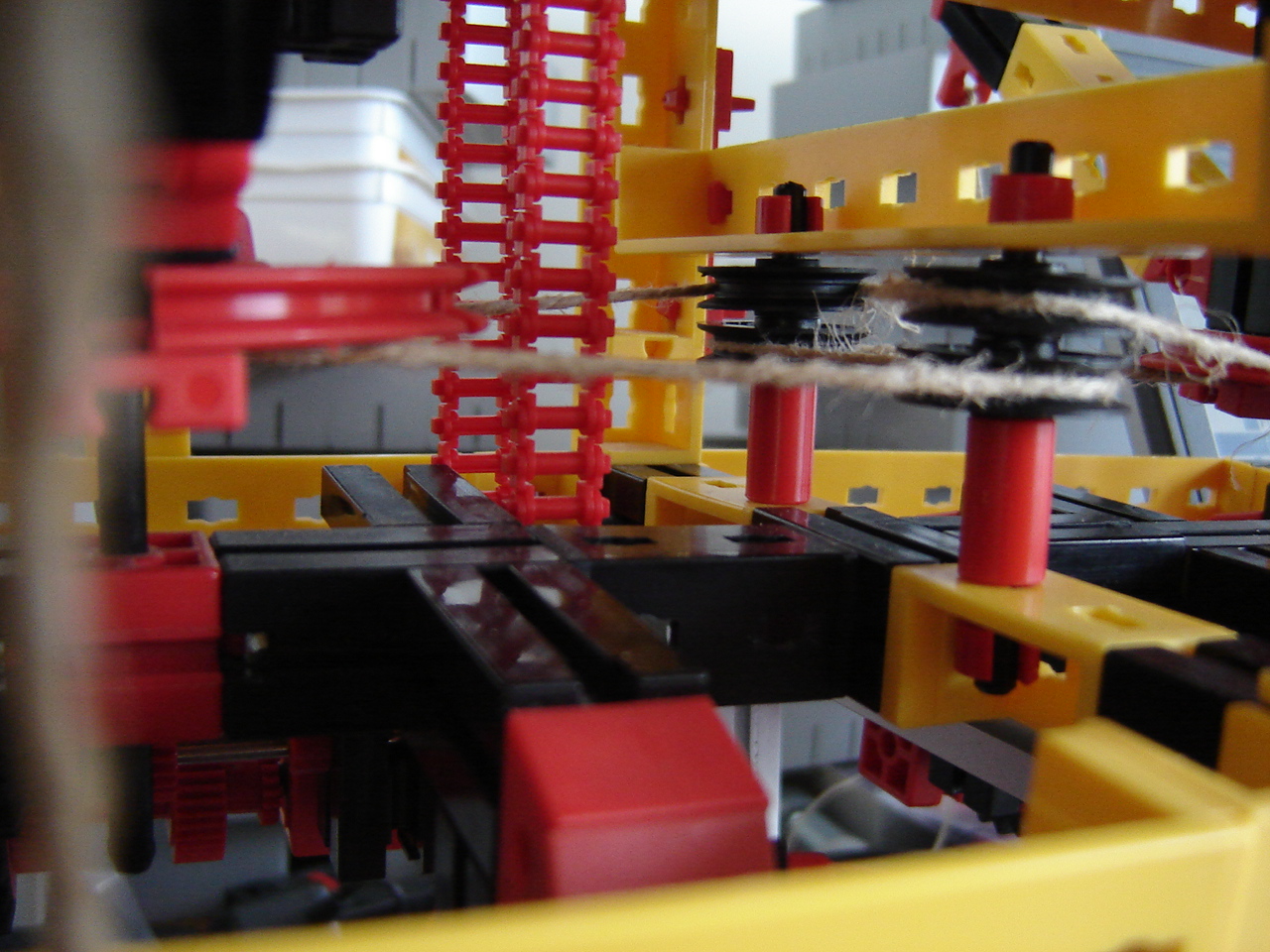
2010: close-up of the axial new connection

7 November
2010: addition of horizontal
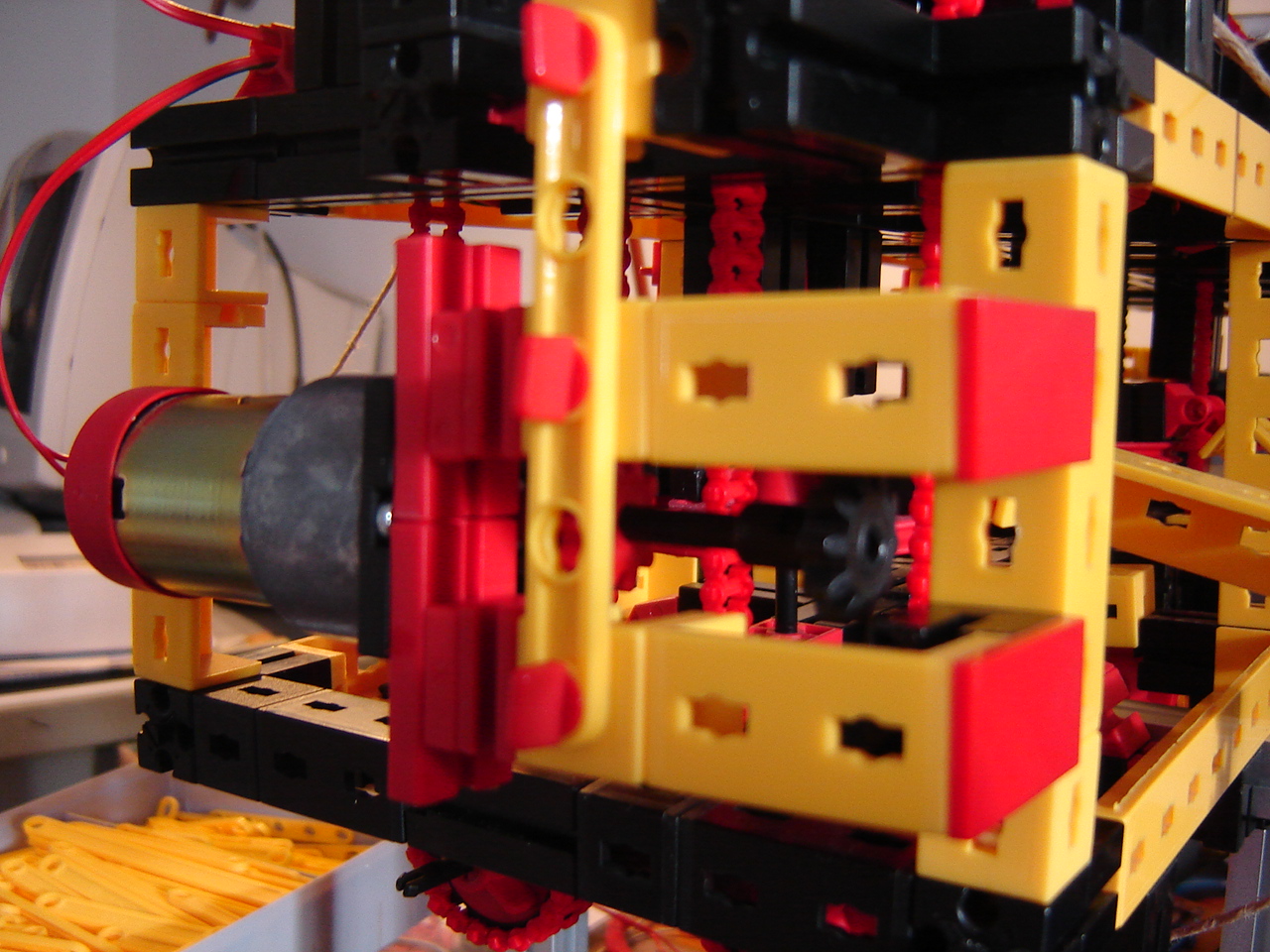
7 November 2010: close-up
7 November 2010: another close-up
7 November
2010: second horizontal
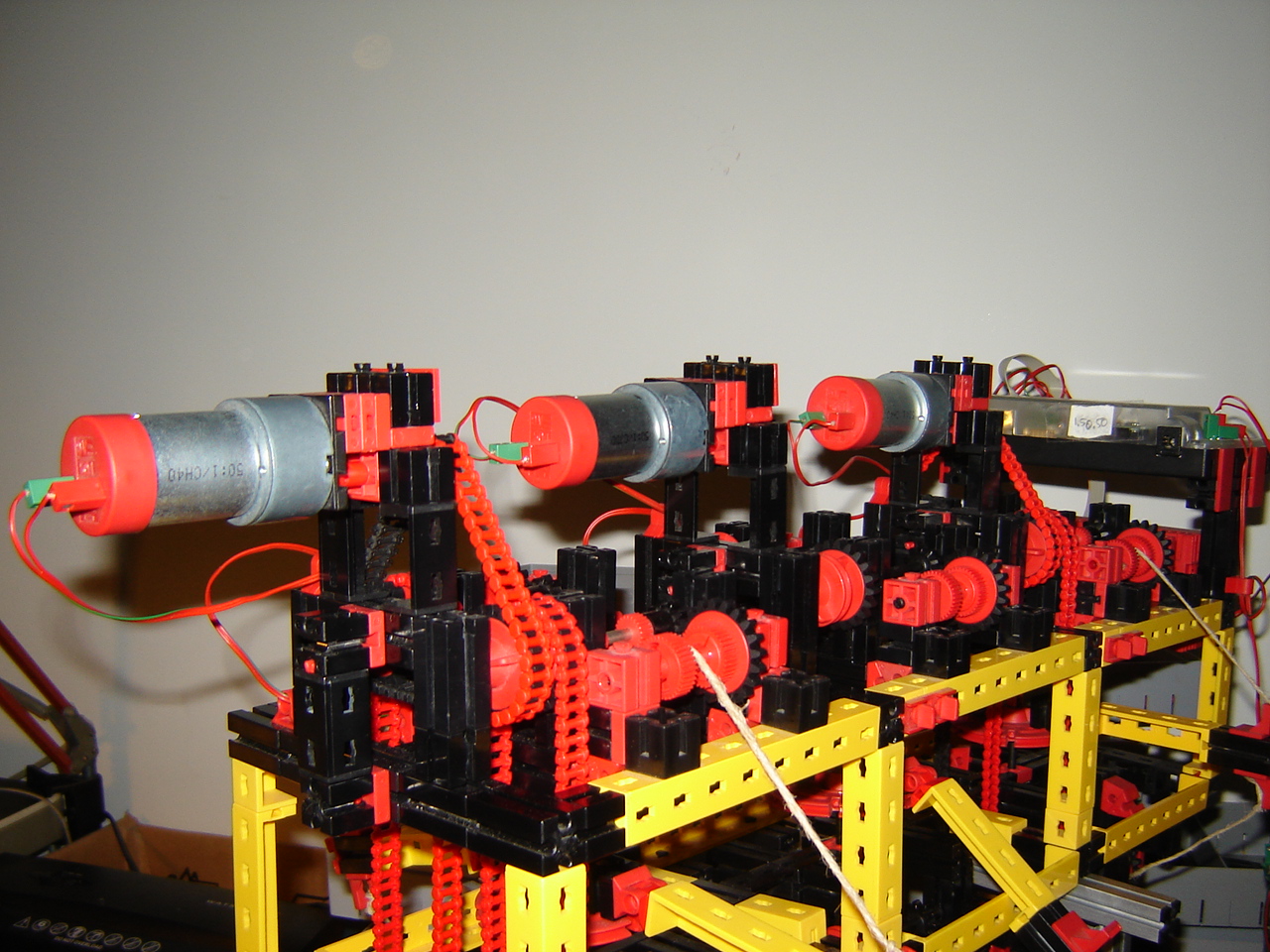
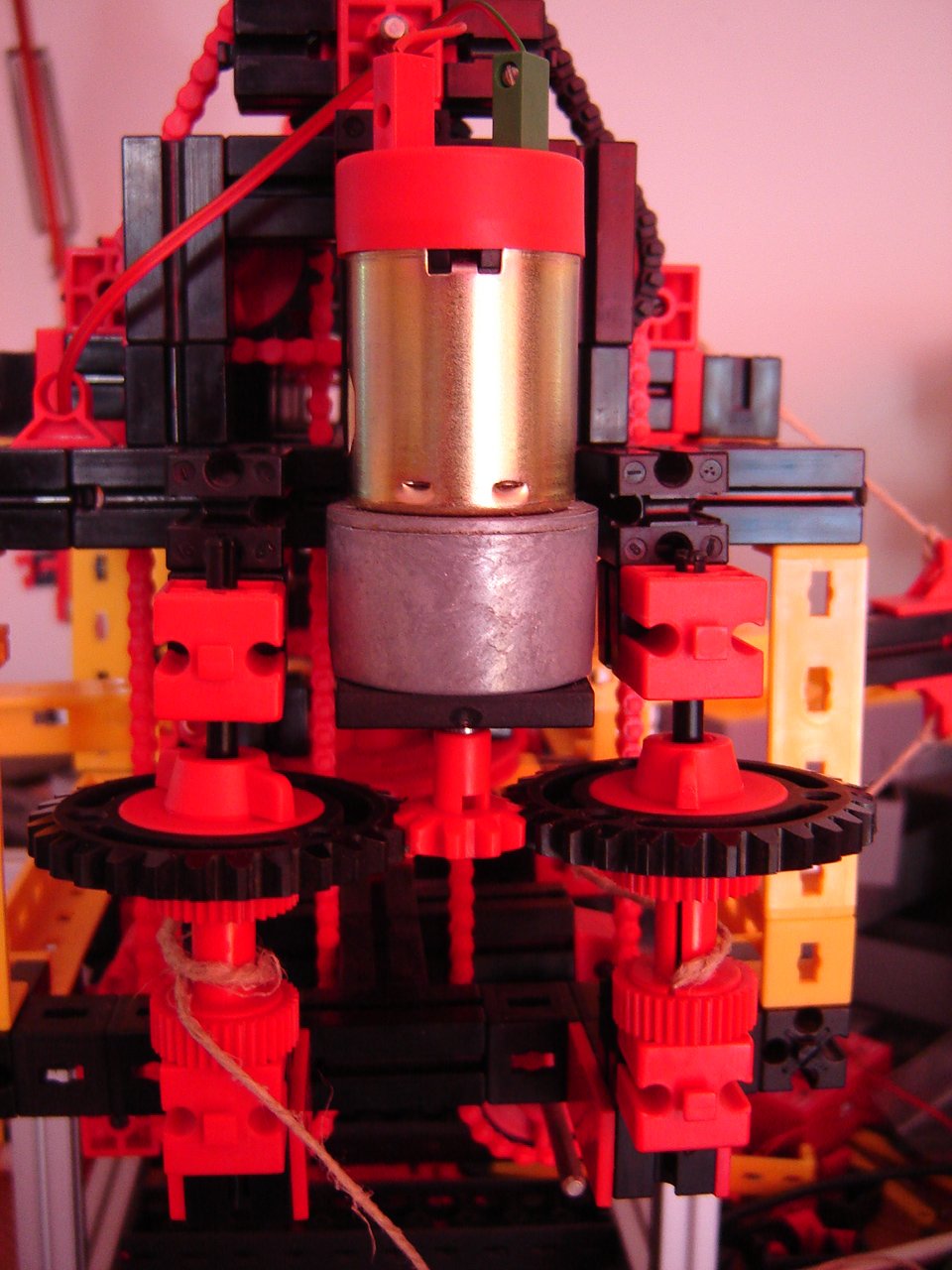
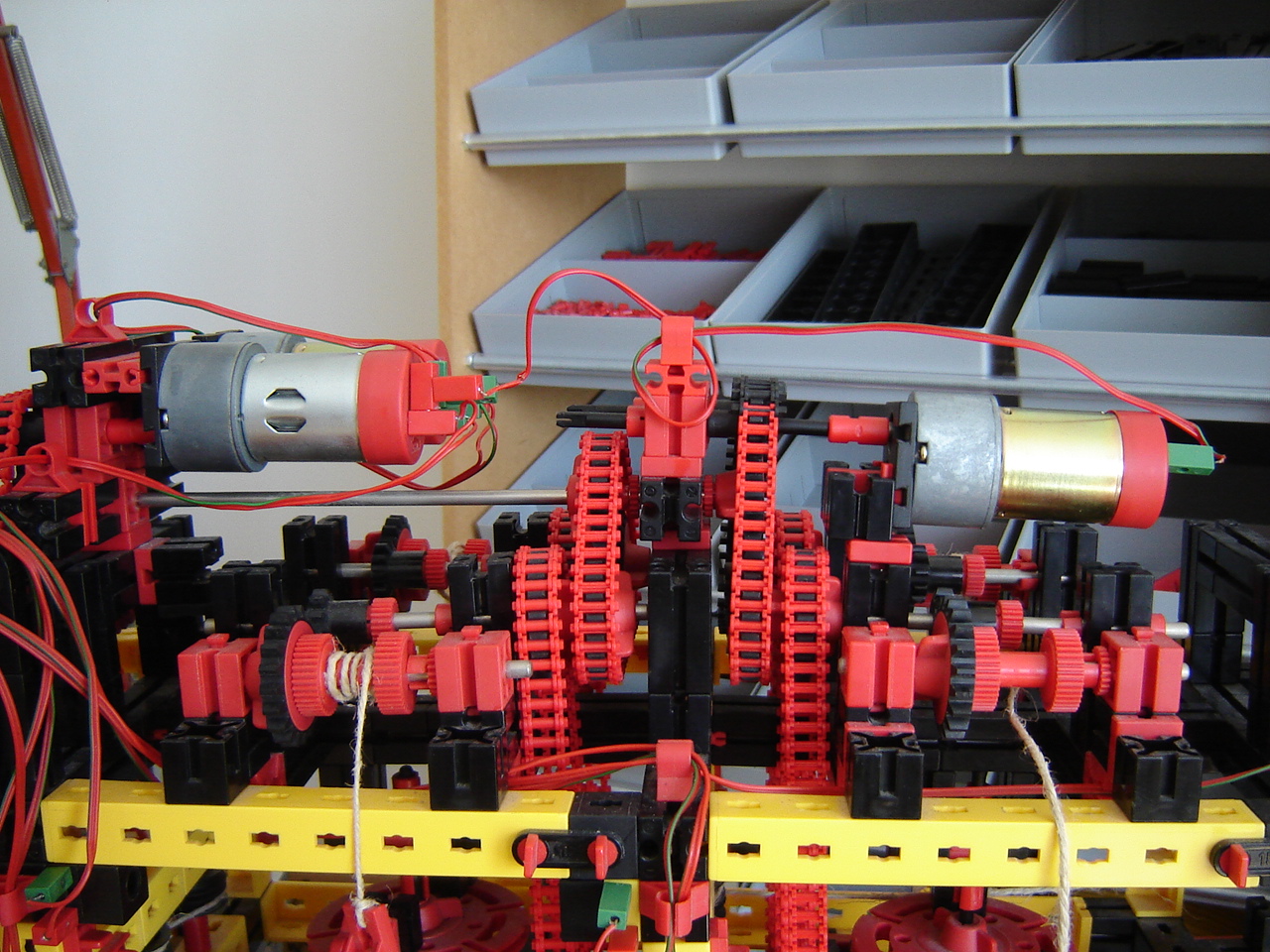
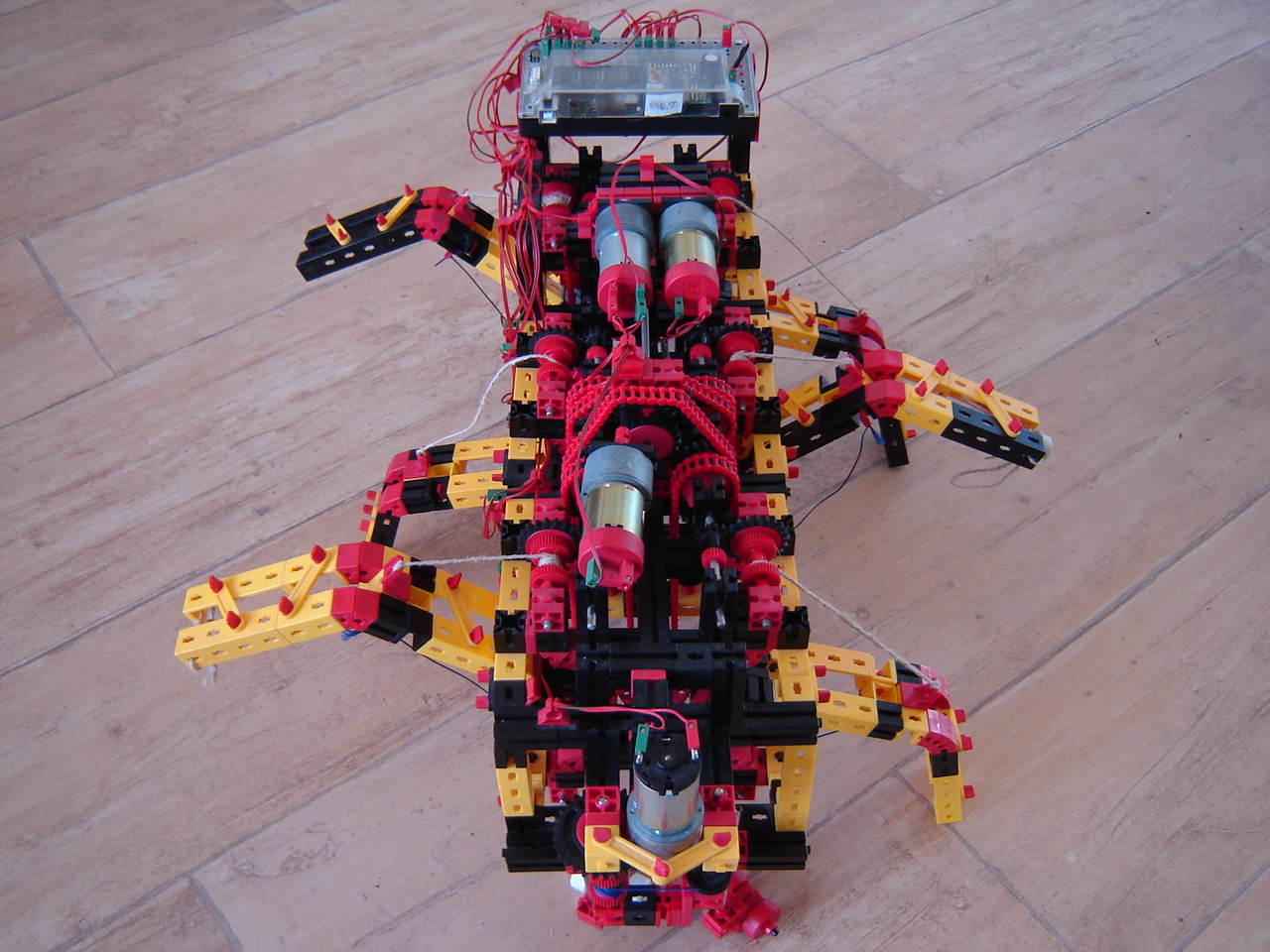
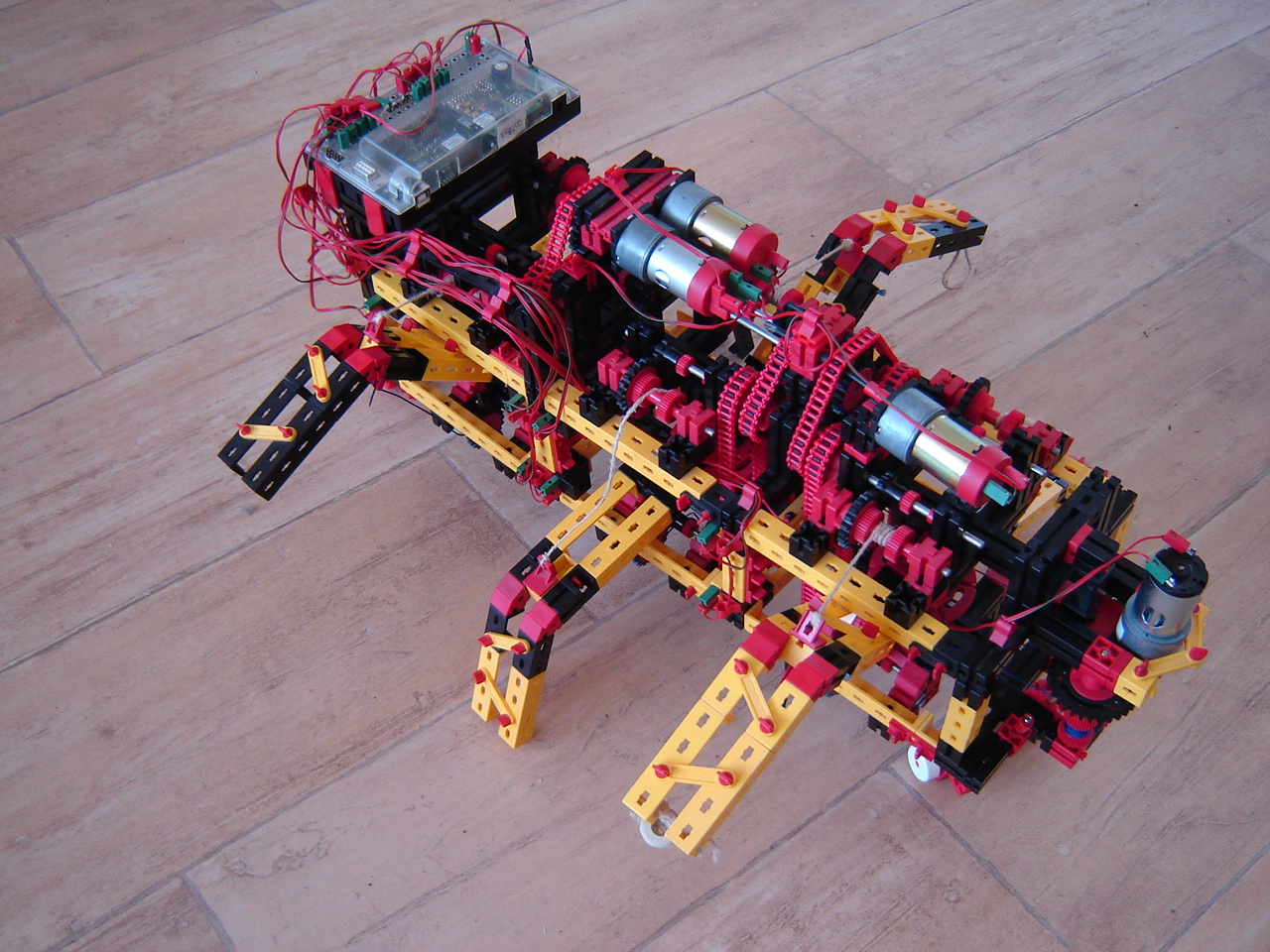
20 december 2010: new motor setup
20 december 2010: new motor setup (2)
13 March 2011: middle legs gearing changed. All legs are now
driven by 1 motor.
other view

sideview
13 March 2011: motor for horizontal movement...still needs work.
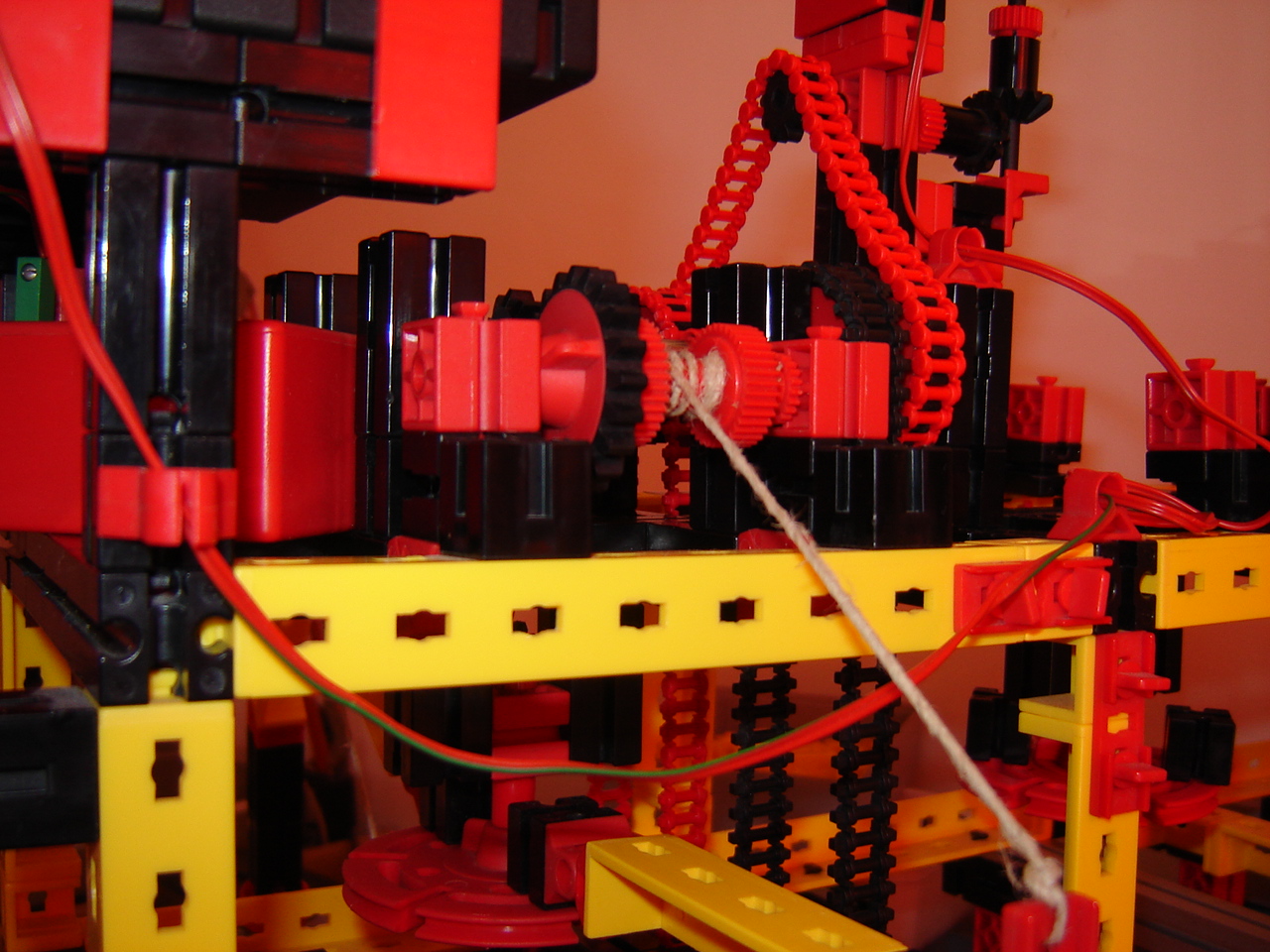
27 June 2011: changed gears for horizontal movement.
27 June 2011: changed gears for horizontal movement.
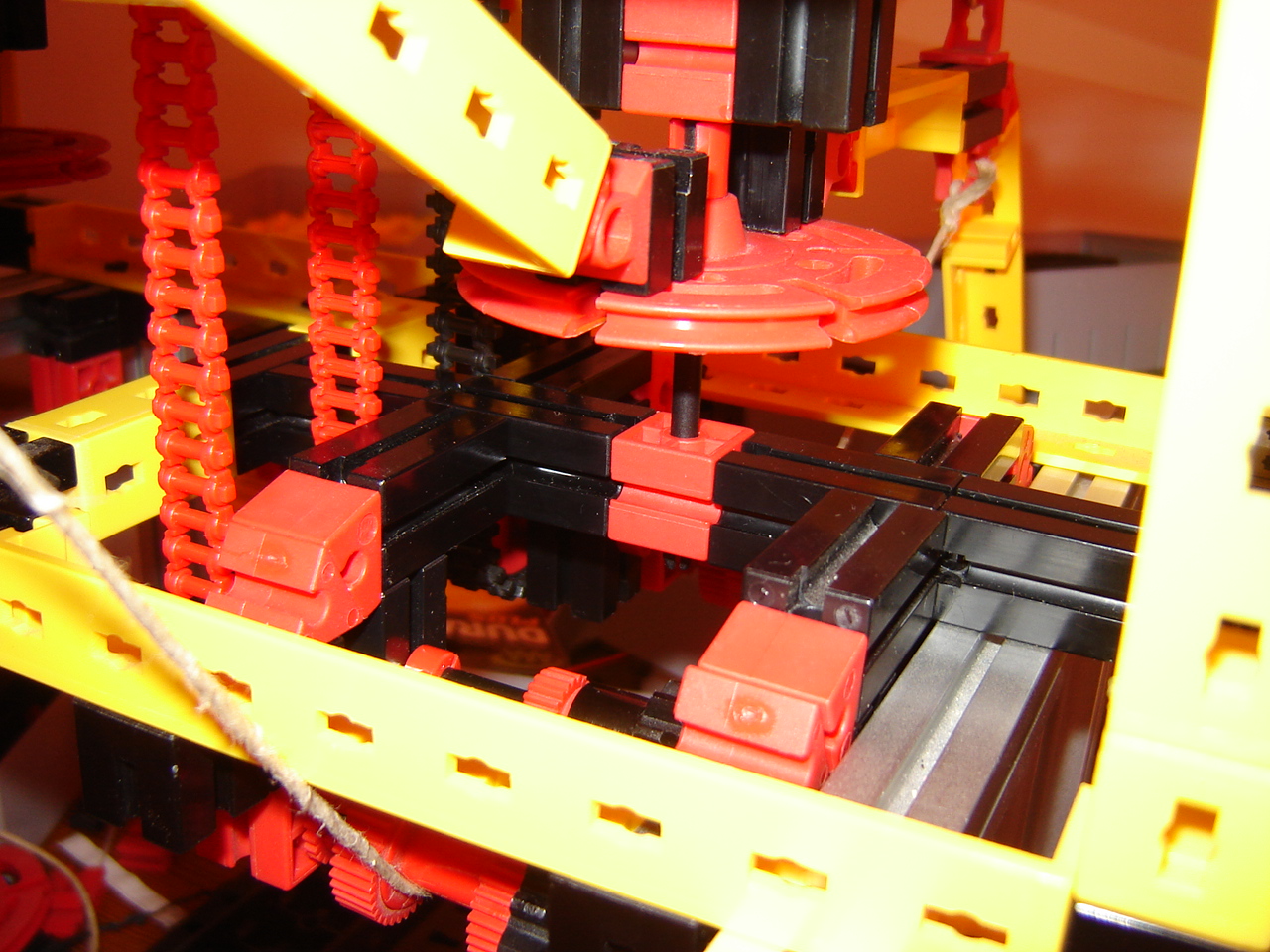
3 July 2011: Change guidance for horizontal wiring.
3 July 2011: Change guidance for horizontal wiring.

3 July 2011: backside hip wheel.
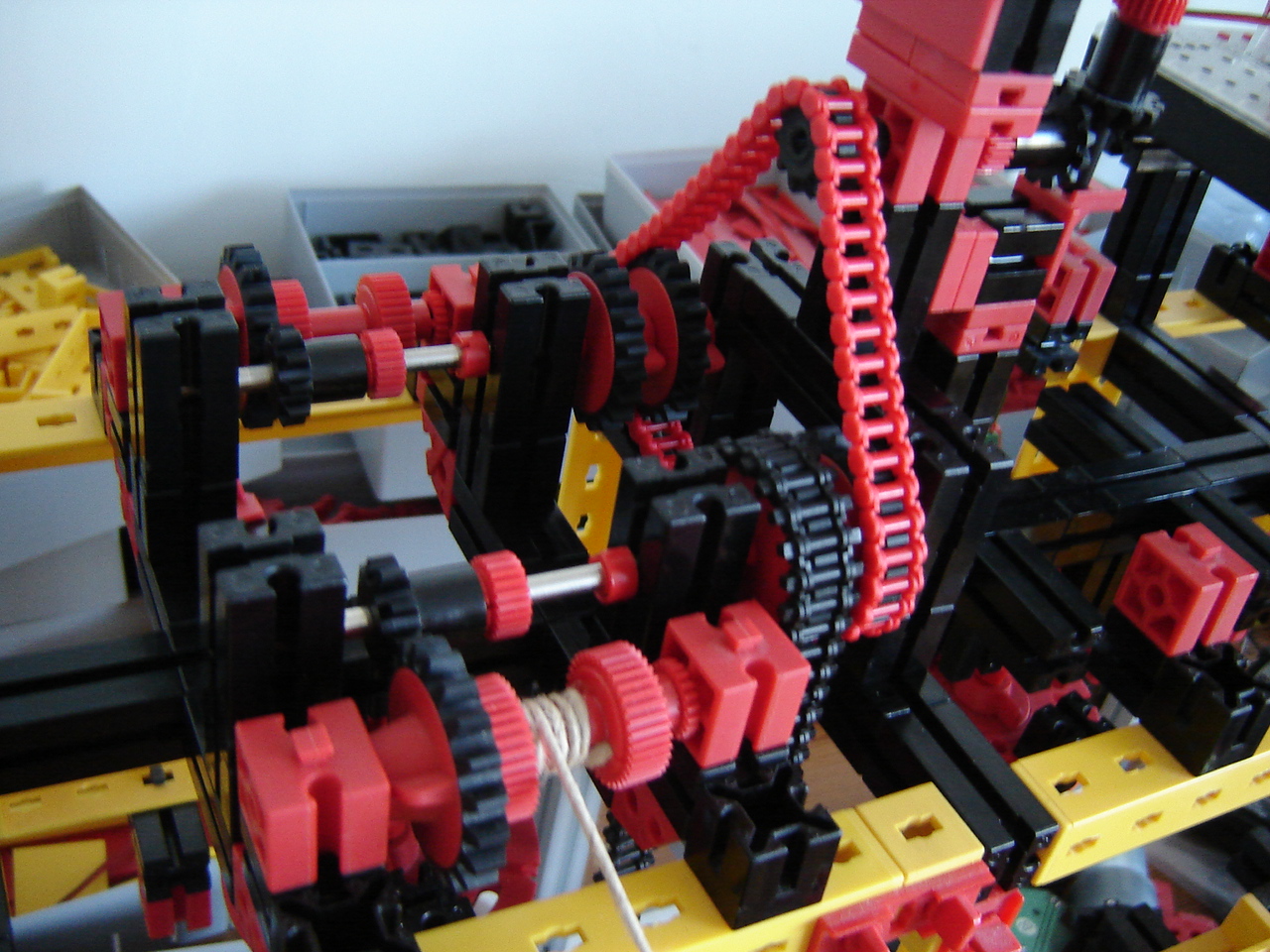
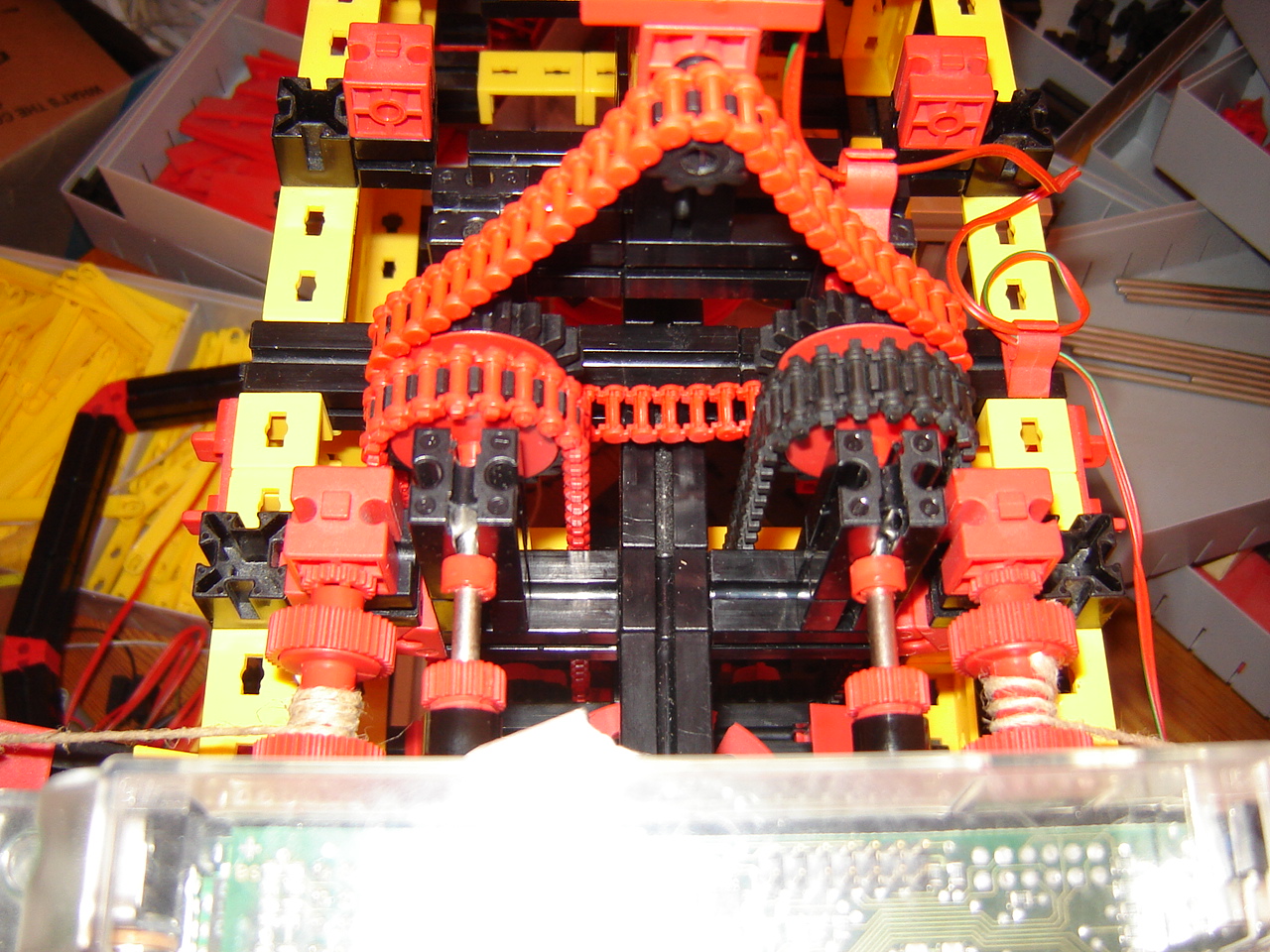
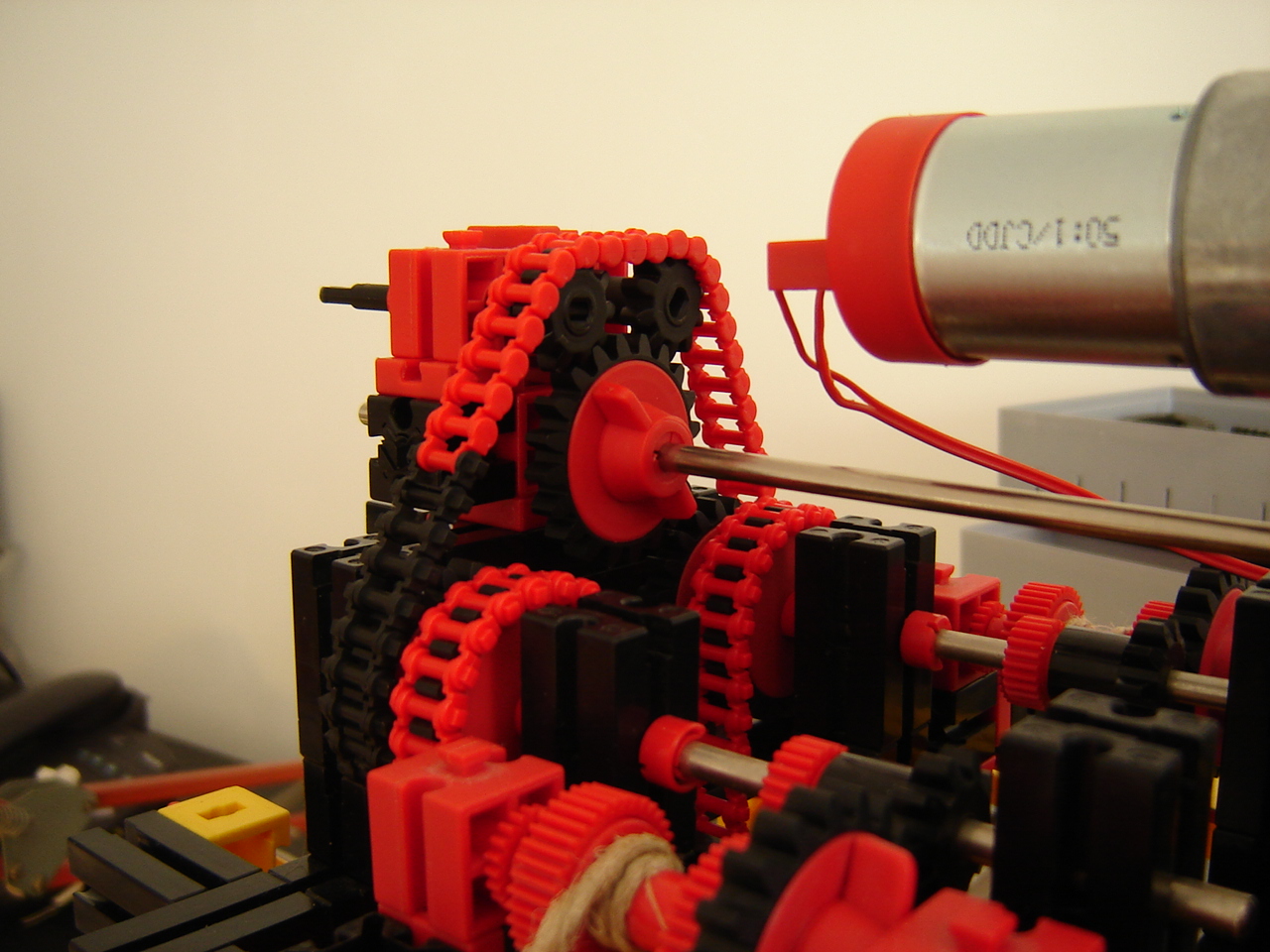
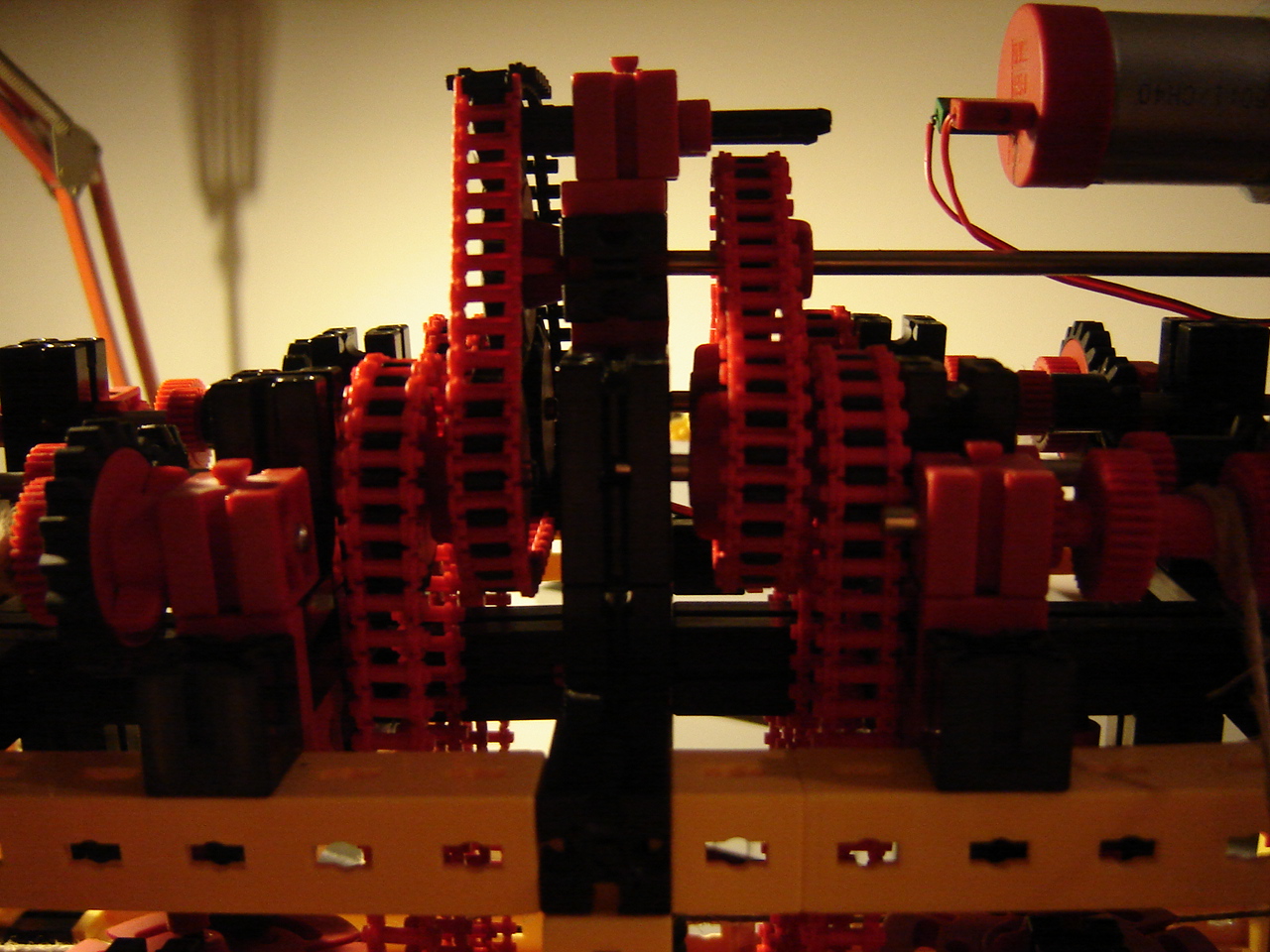
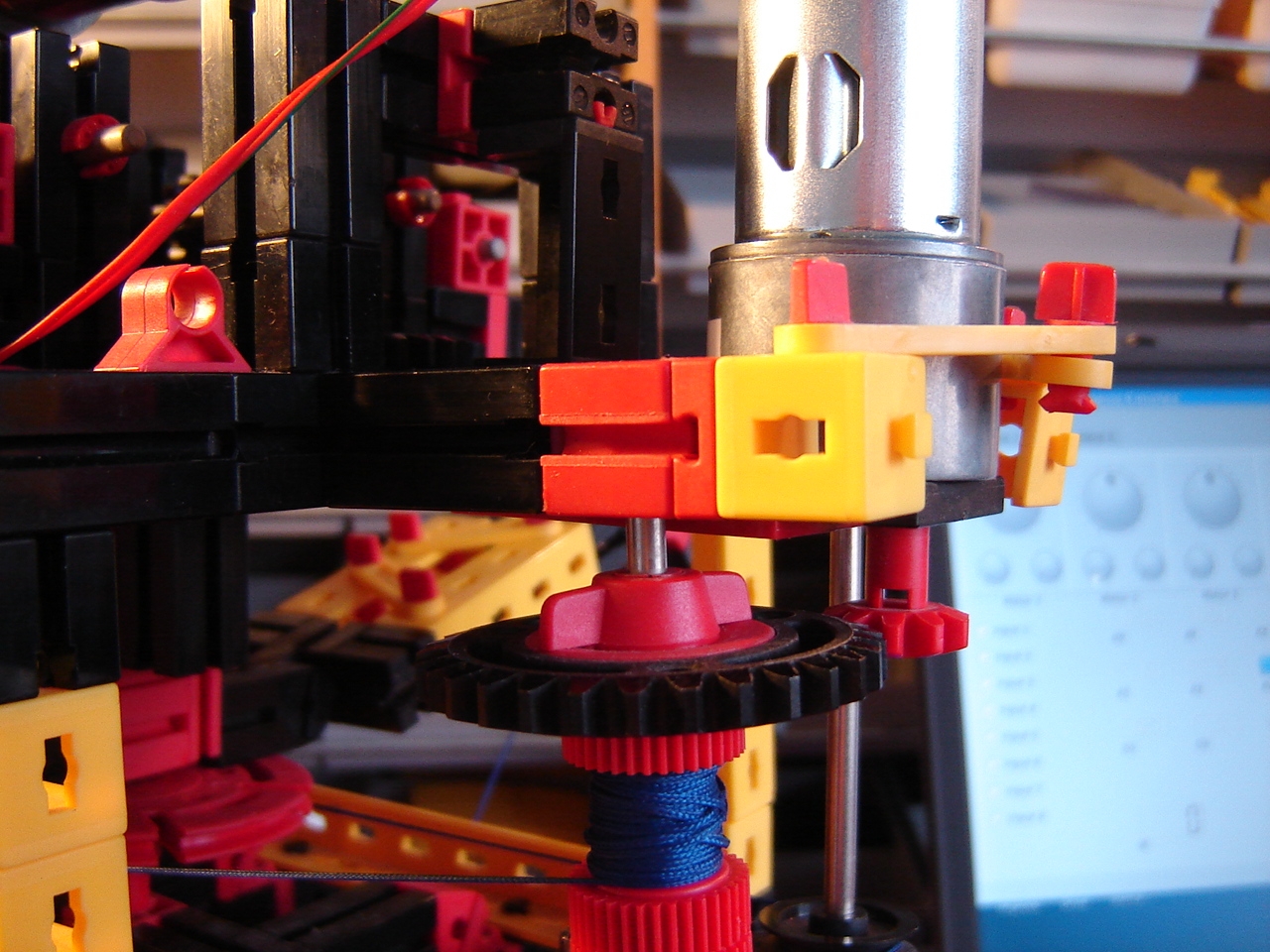
14 July 2011: new construction of gear(1)
14 July 2011: new construction of gear(2)
14 July 2011: total view..kind of
13 March
2011: middle legs gearing changed. All legs are now driven by
1 motor.
other view
sideview
13 March
2011: motor for horizontal movement..
27 June 2011:
changed gears for horizontal movement.
27 June 2011:
changed gears for horizontal movement.
3 July 2011:
Change guidance for horizontal wiring.
3 July 2011:
Change guidance for horizontal wiring.
3 July 2011:
backside hip wheel.
14 July 2011:
new constructi
14 July 2011:
new constructi
14 July 2011:
total view..kind of
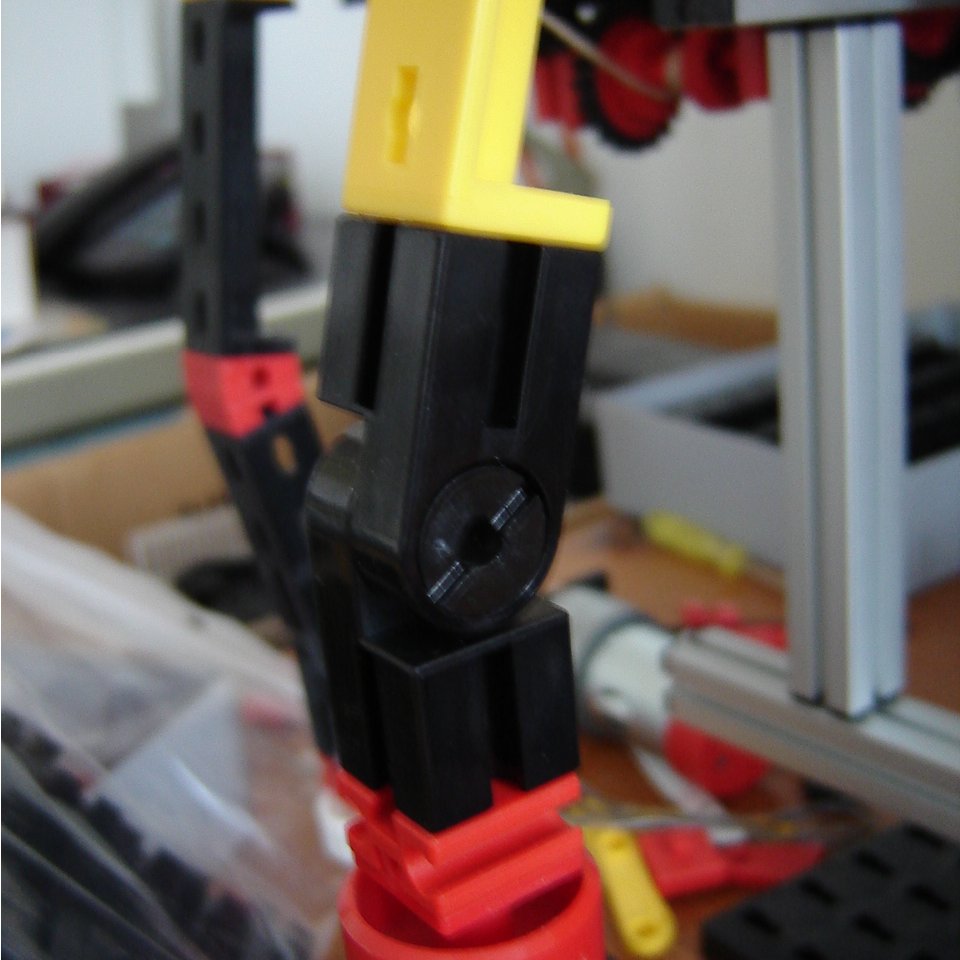
3 August
2011: added joint to the legs

3 August
2011: overview
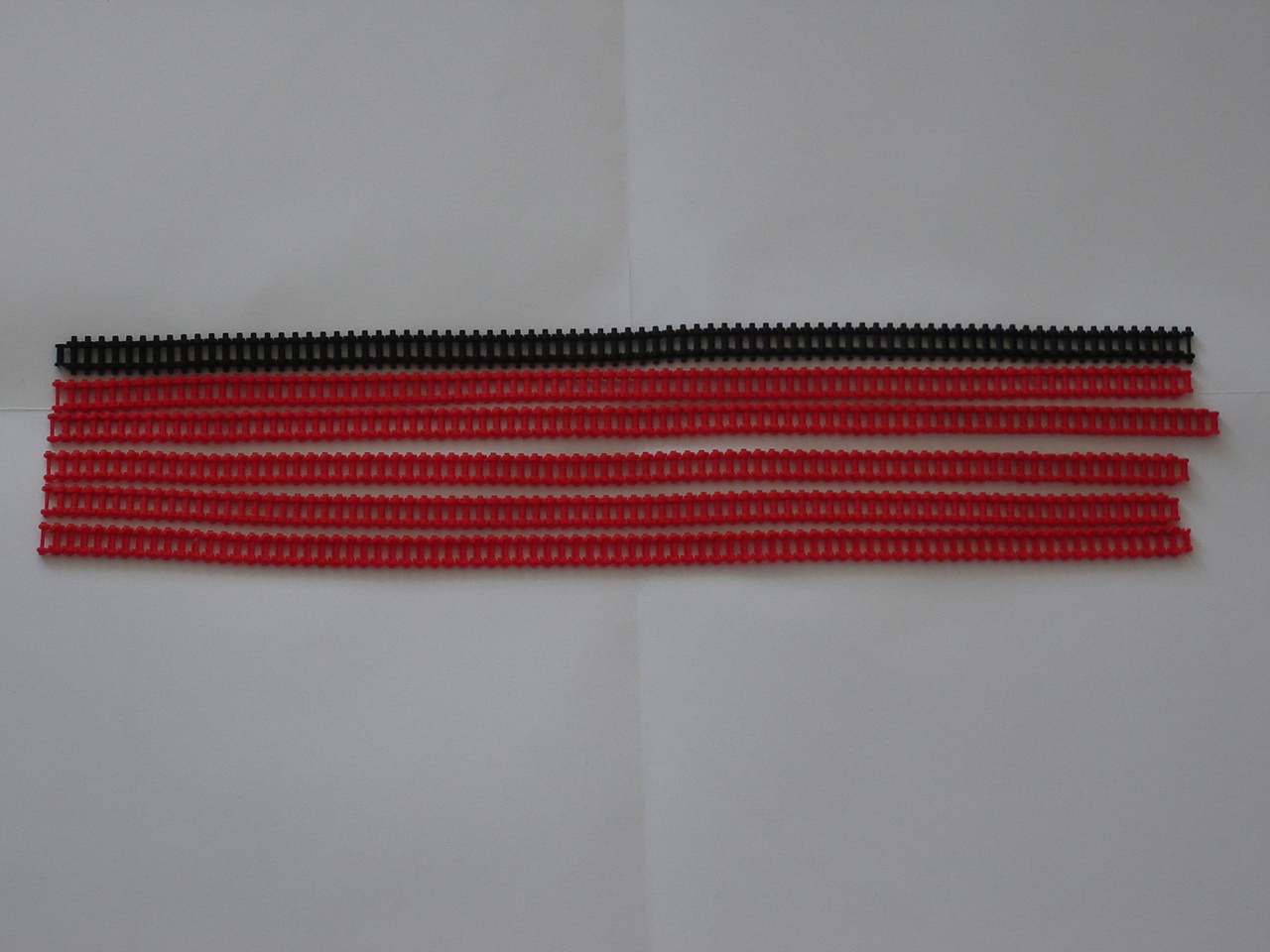
3 August
2011: Added last chain
27 August
2011: due to main transport axis problem I had to relocate the
gearing of the 3rd pair of legs
27 augustus 2011: close-up
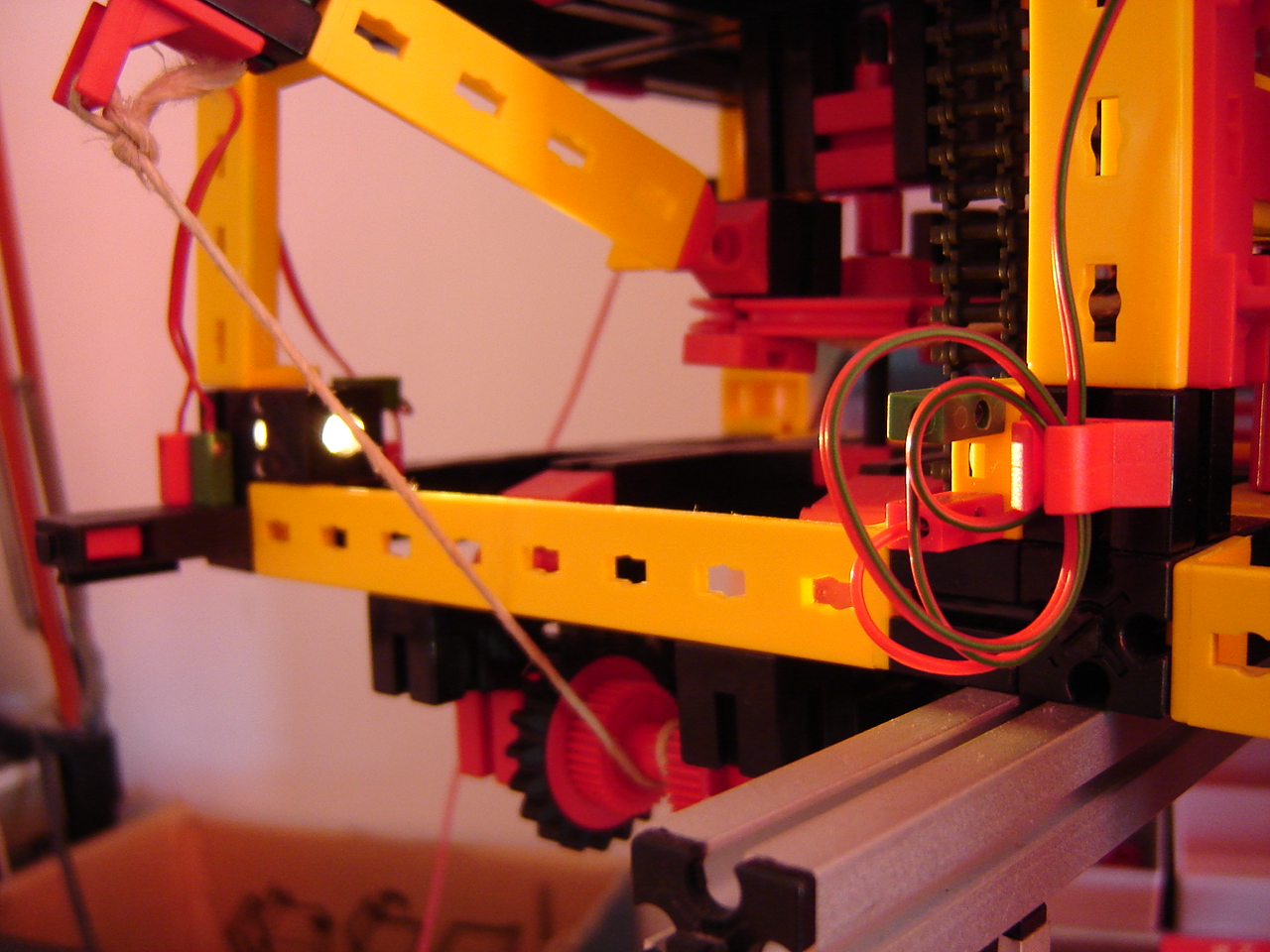
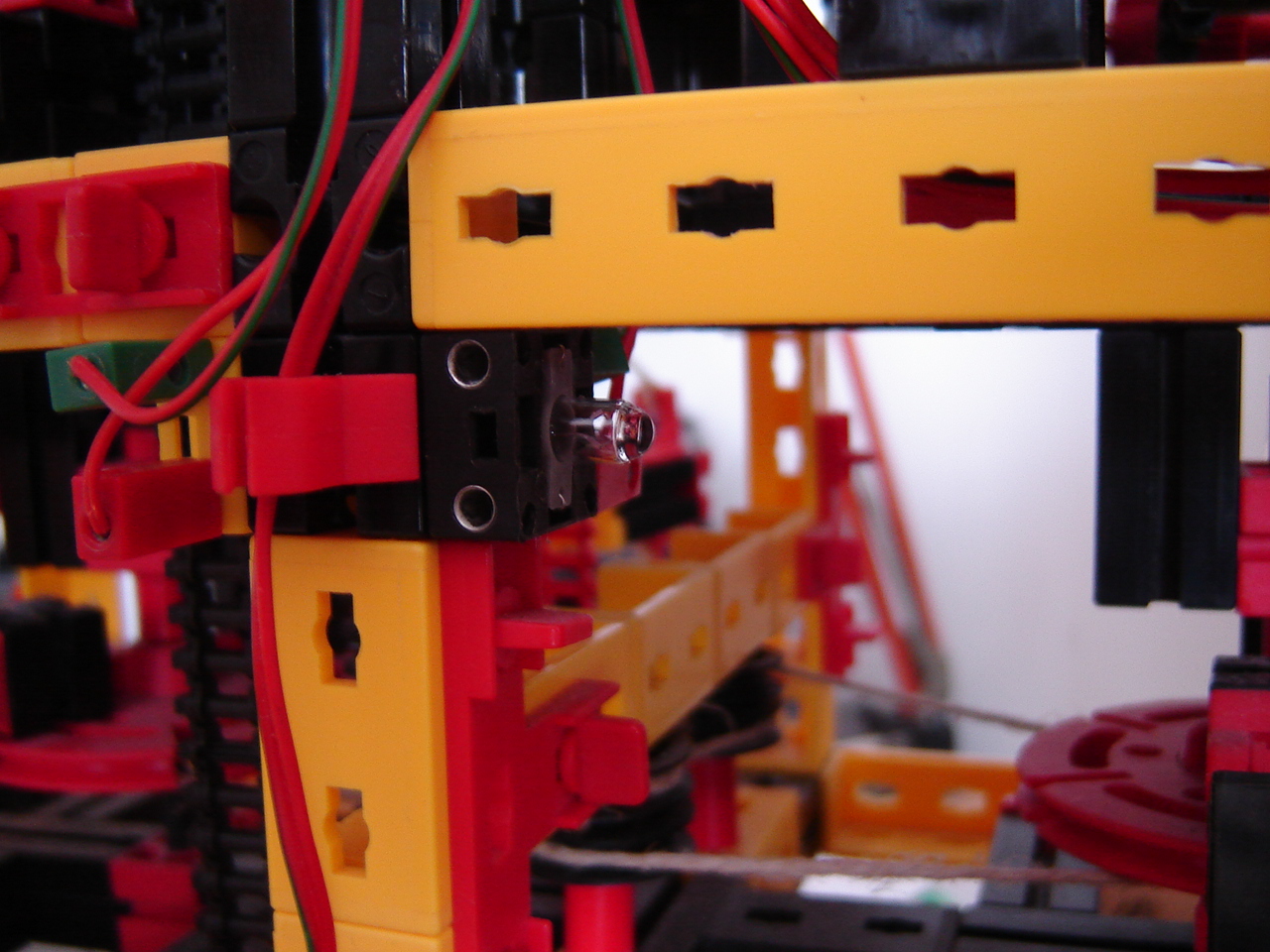
23 July 2012:
Added lens light
23 July 2012: light sensor
25 July 2012:
Burning lens light
25 July 2012:
Screenshot: leg sensor value
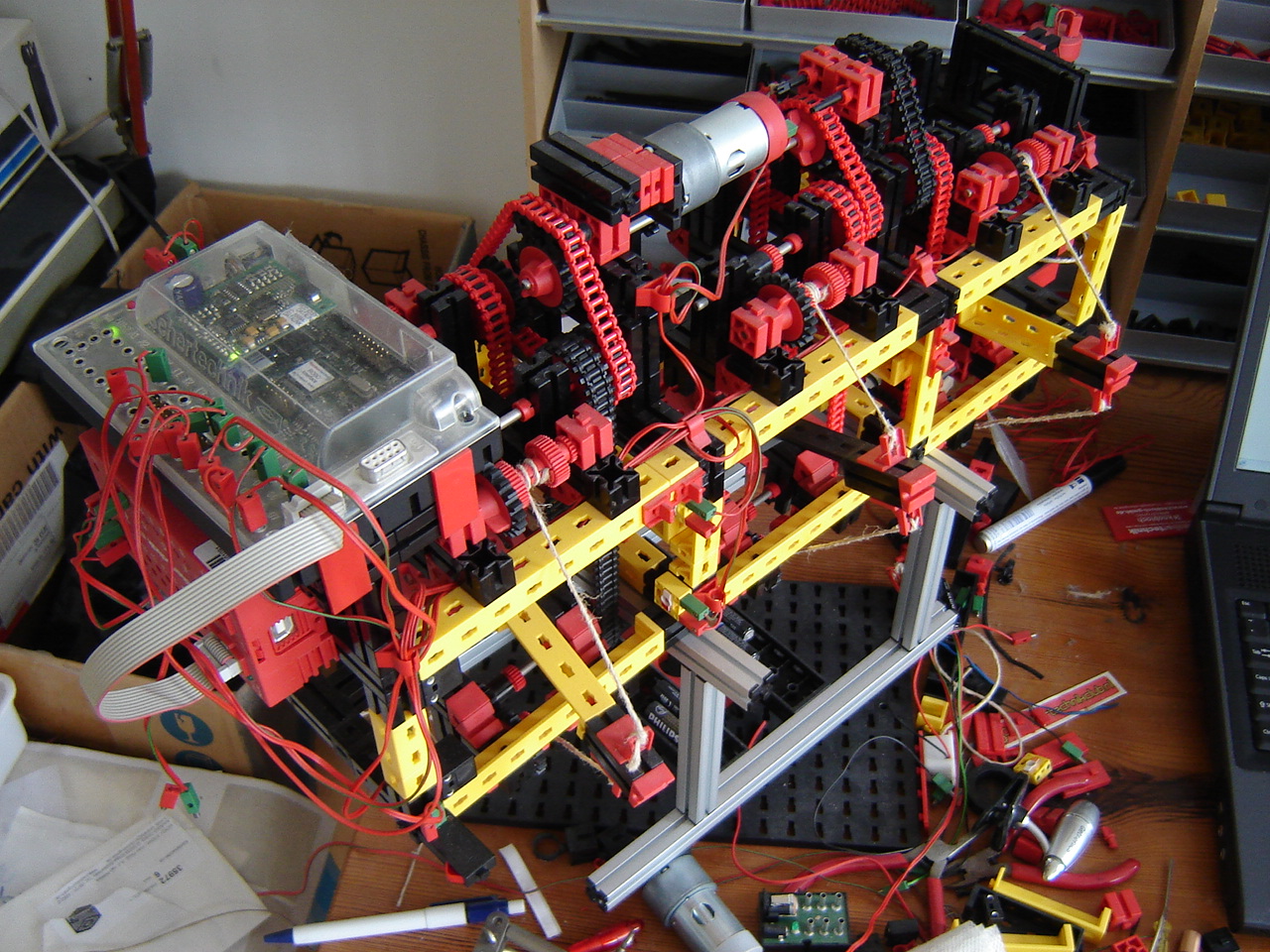
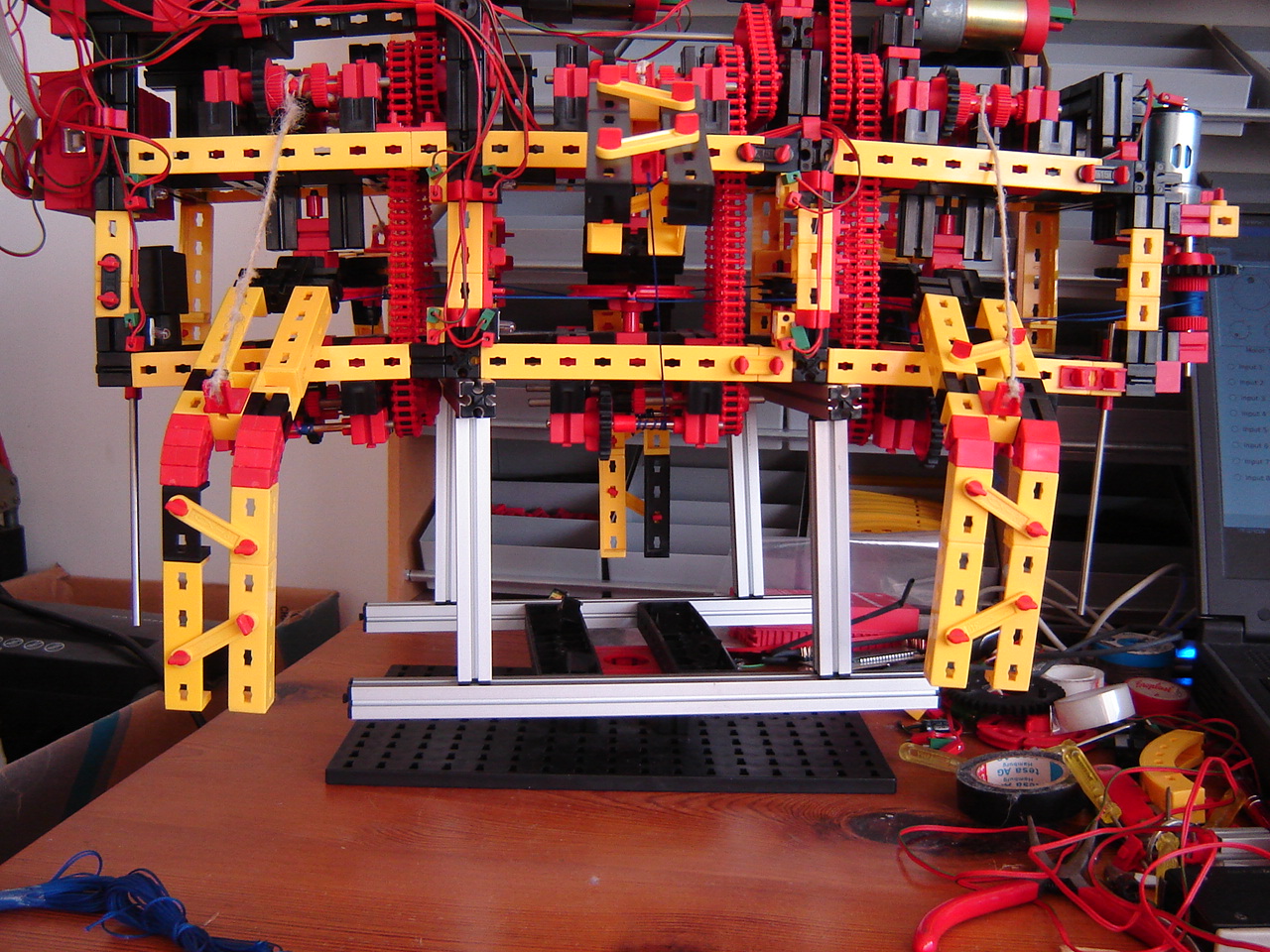
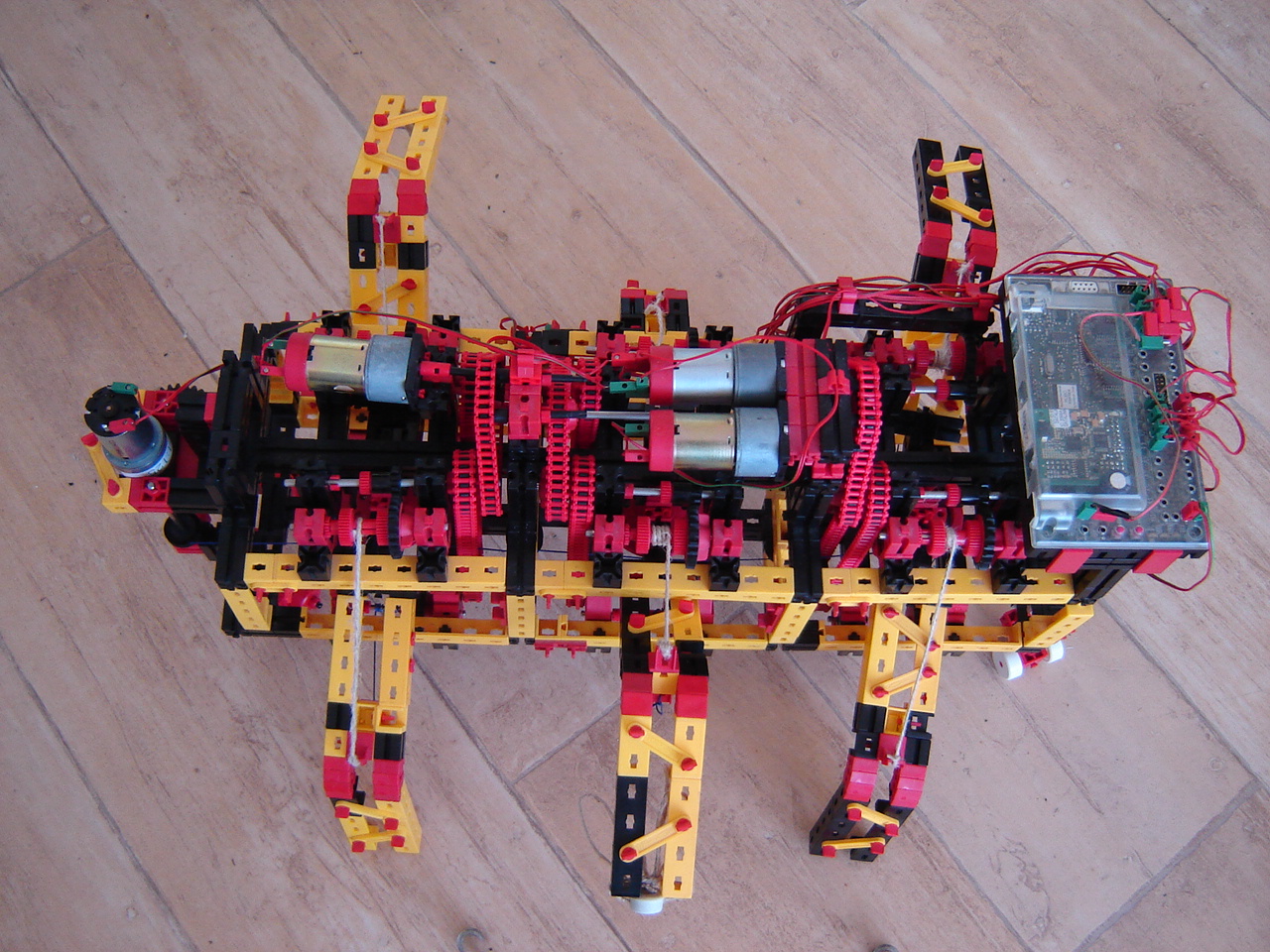
11 May 2013: new overview
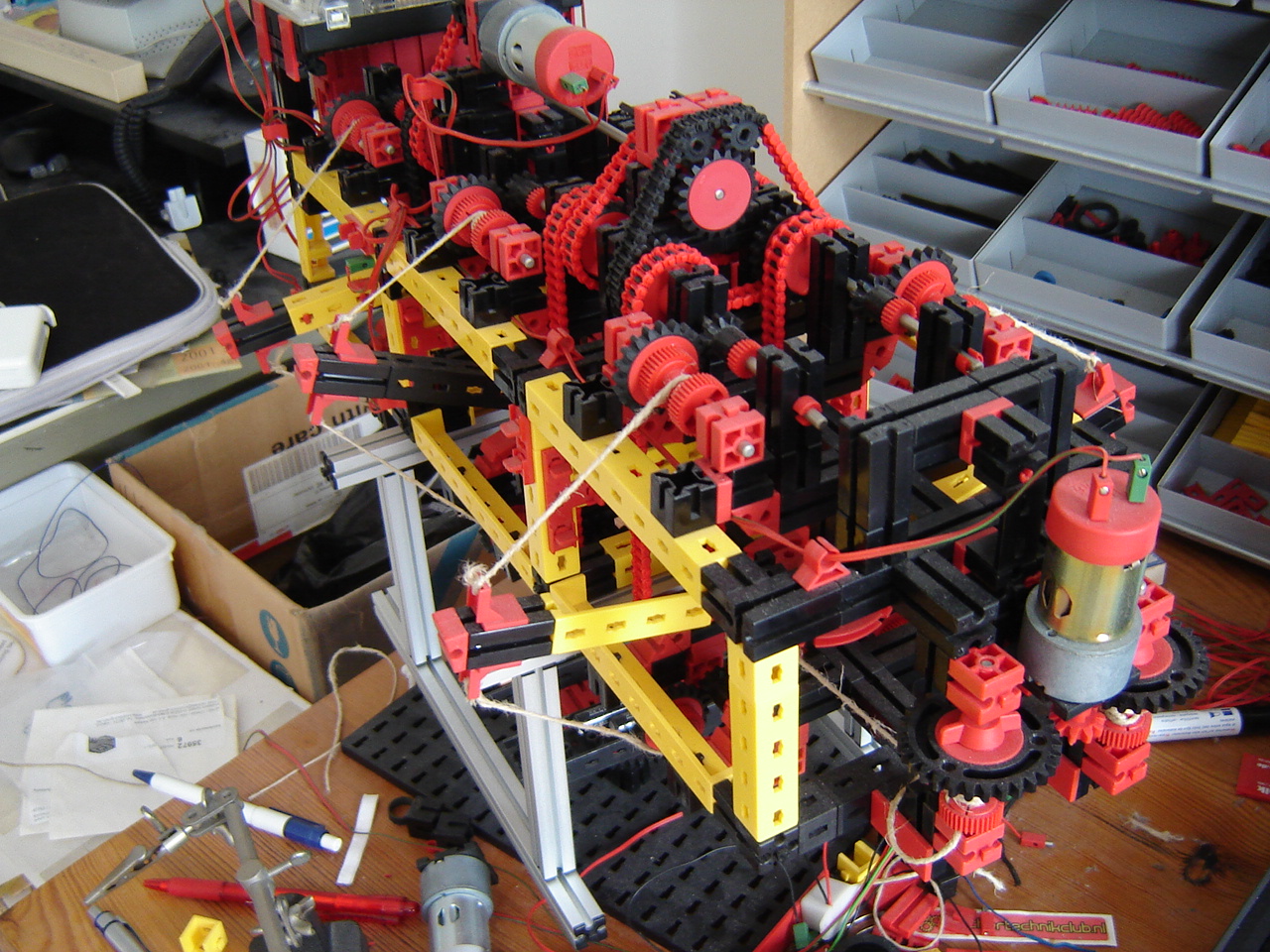
11 May 2013:
new overview
11 May 2013:
new overview
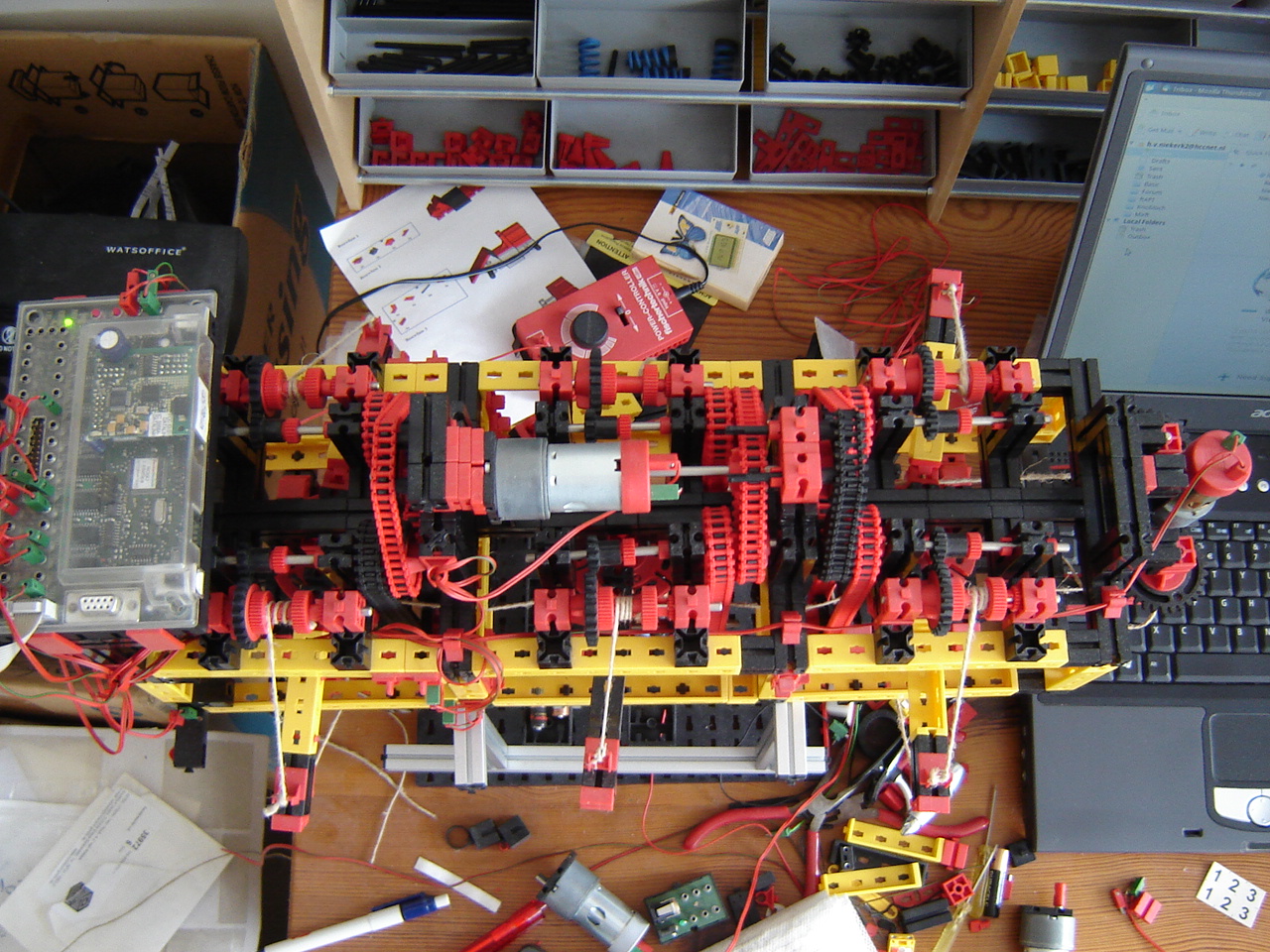
11 May 2013: new overview
15 Aug 2014:
added light sensors
15 Aug 2014:
new light source for sensor
15 Aug 2014: directive cap
15 Aug 2014:
rewired
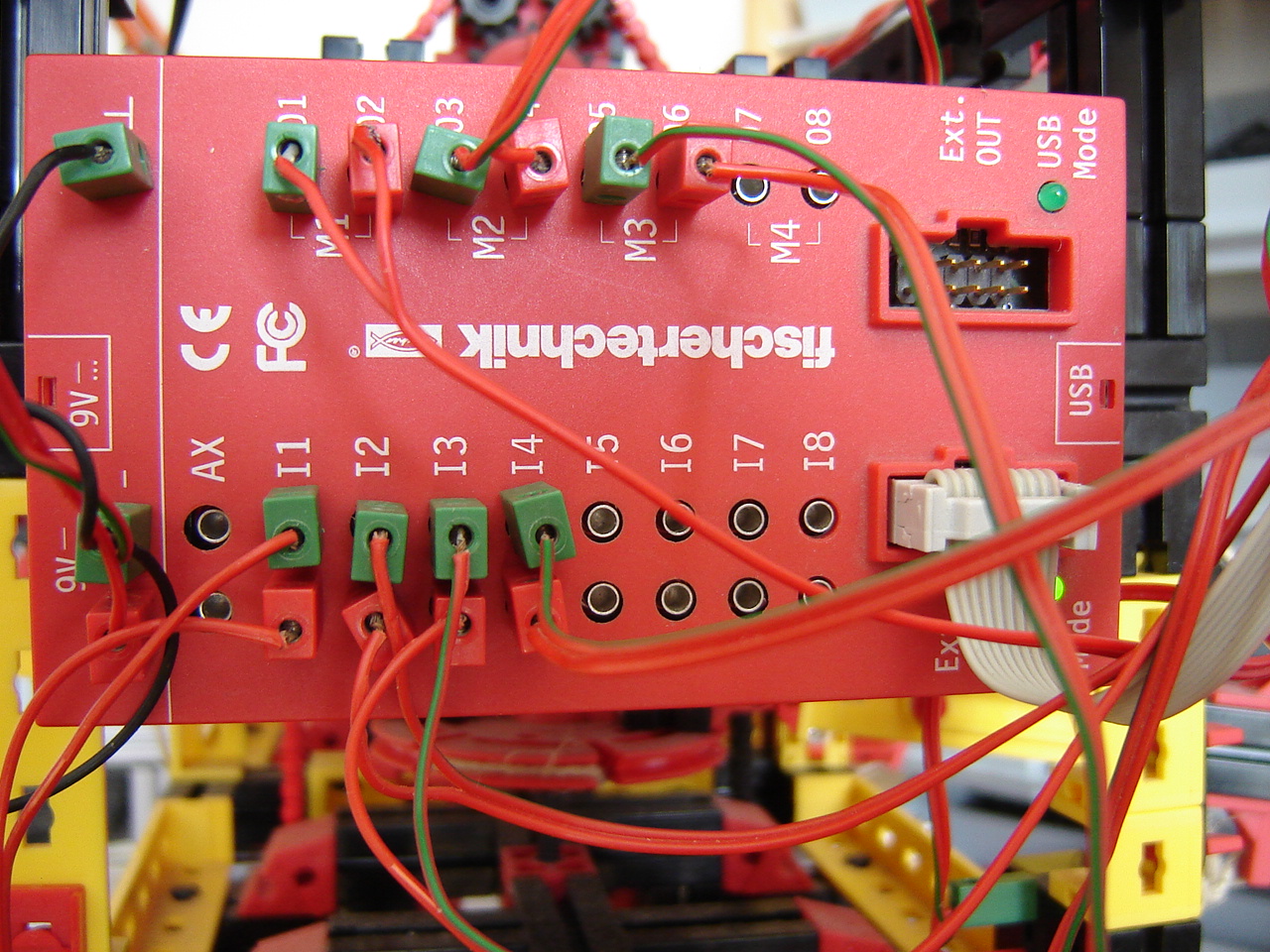
15 Aug 2014:
rewired: all sensors and sources grouped
17 Jan. 2015: 2nd motor added for vertical movement
21 Jan. 2015: hanging motors changed

25 Jan. 2015: other view on changed hanging

8 May 2015: replaced horizontal motor
8 May 2015: contacts of horizontal motor

8 May 2015: 4th lenslamp added
8 May 2015: details of horizontal gears
21May 2015: addition of a supporting motor
21May 2015: addition of a supporting motor

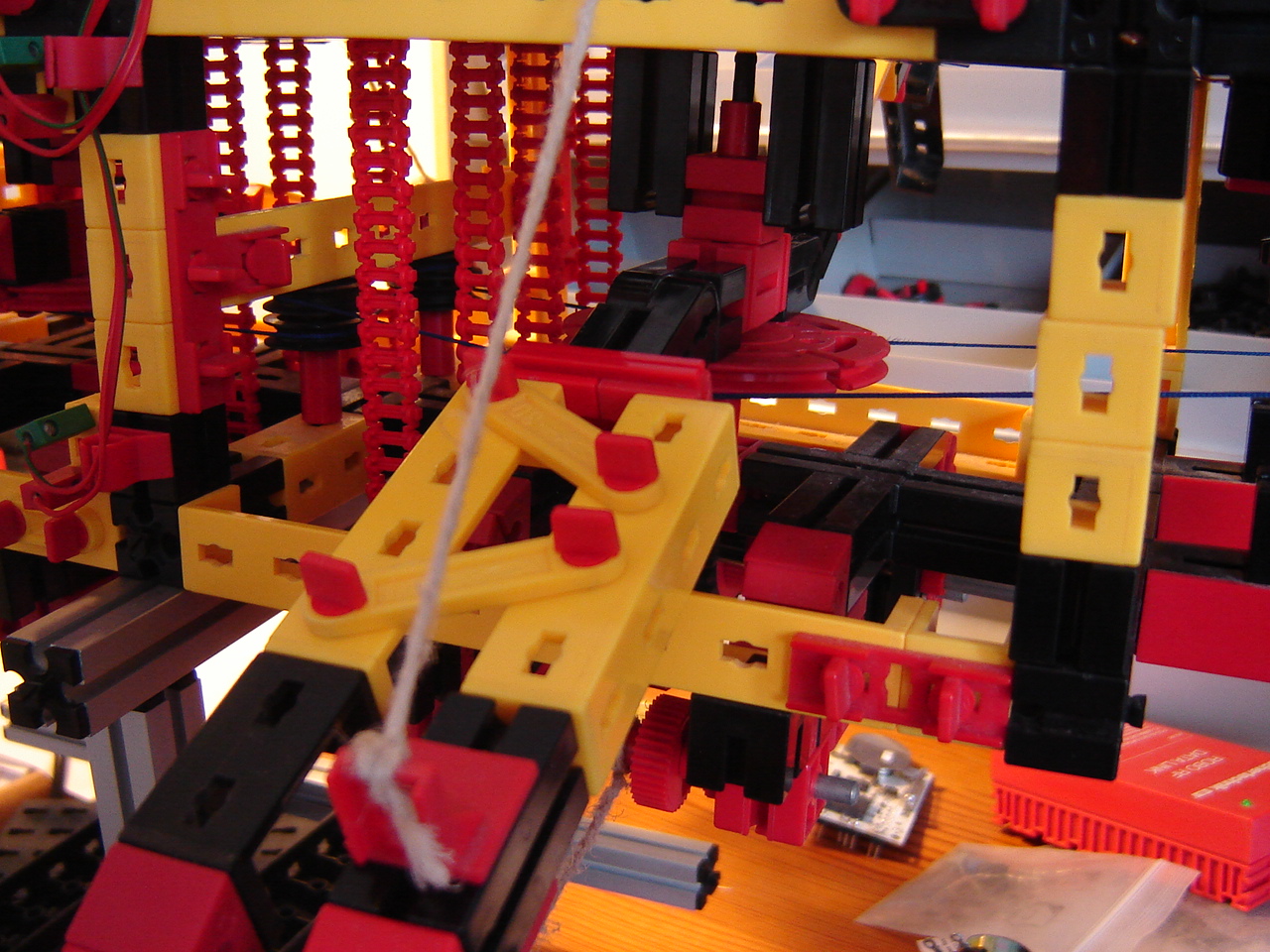
1 June 2015: another attempt to fix the string to the hip
wheel
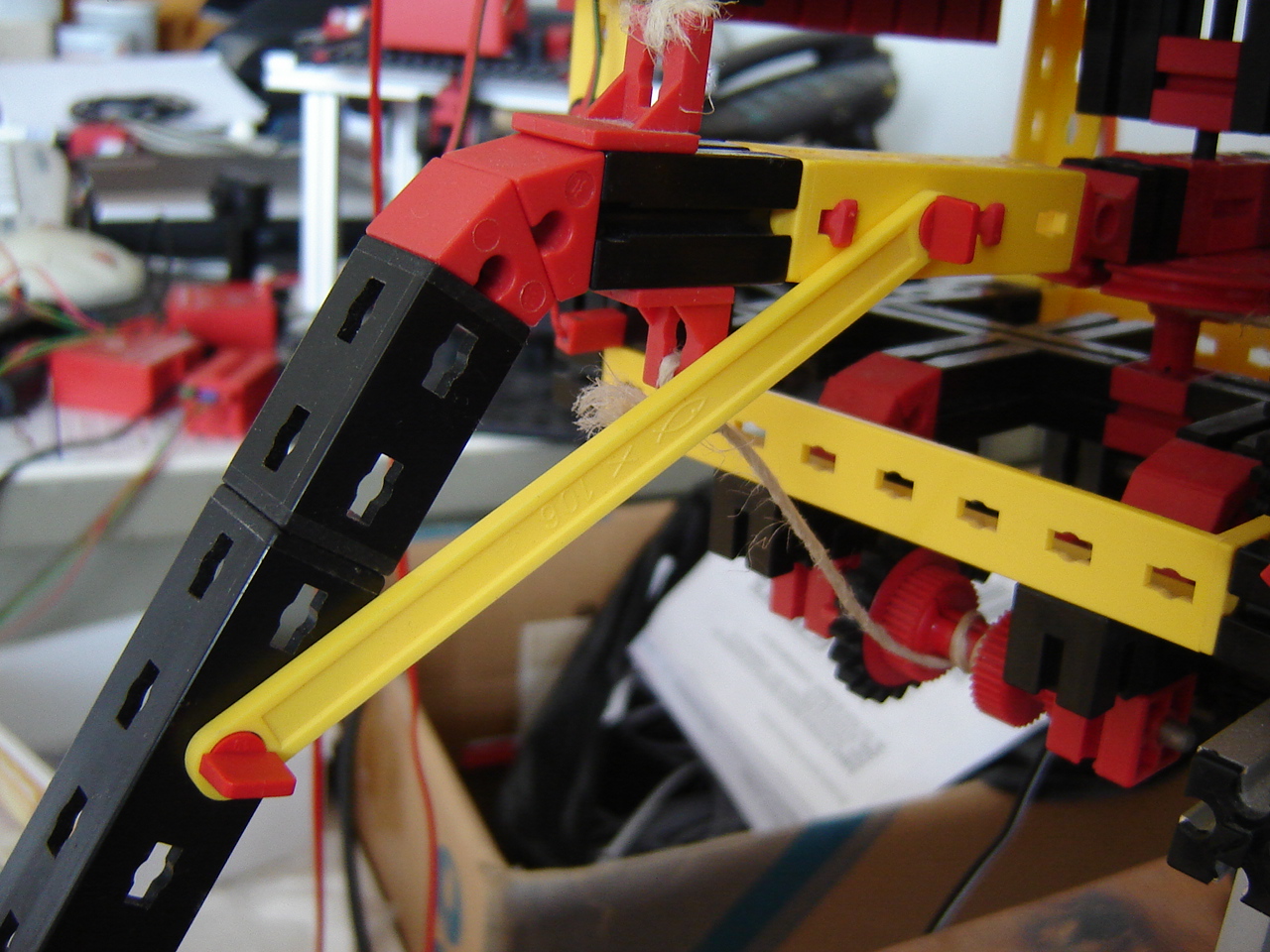
6 June 2015: a possible solution to stabilize the legs.
6 June 2015: different view on the solution.
17 June 2015: fore and middle hips/legs stabilized.
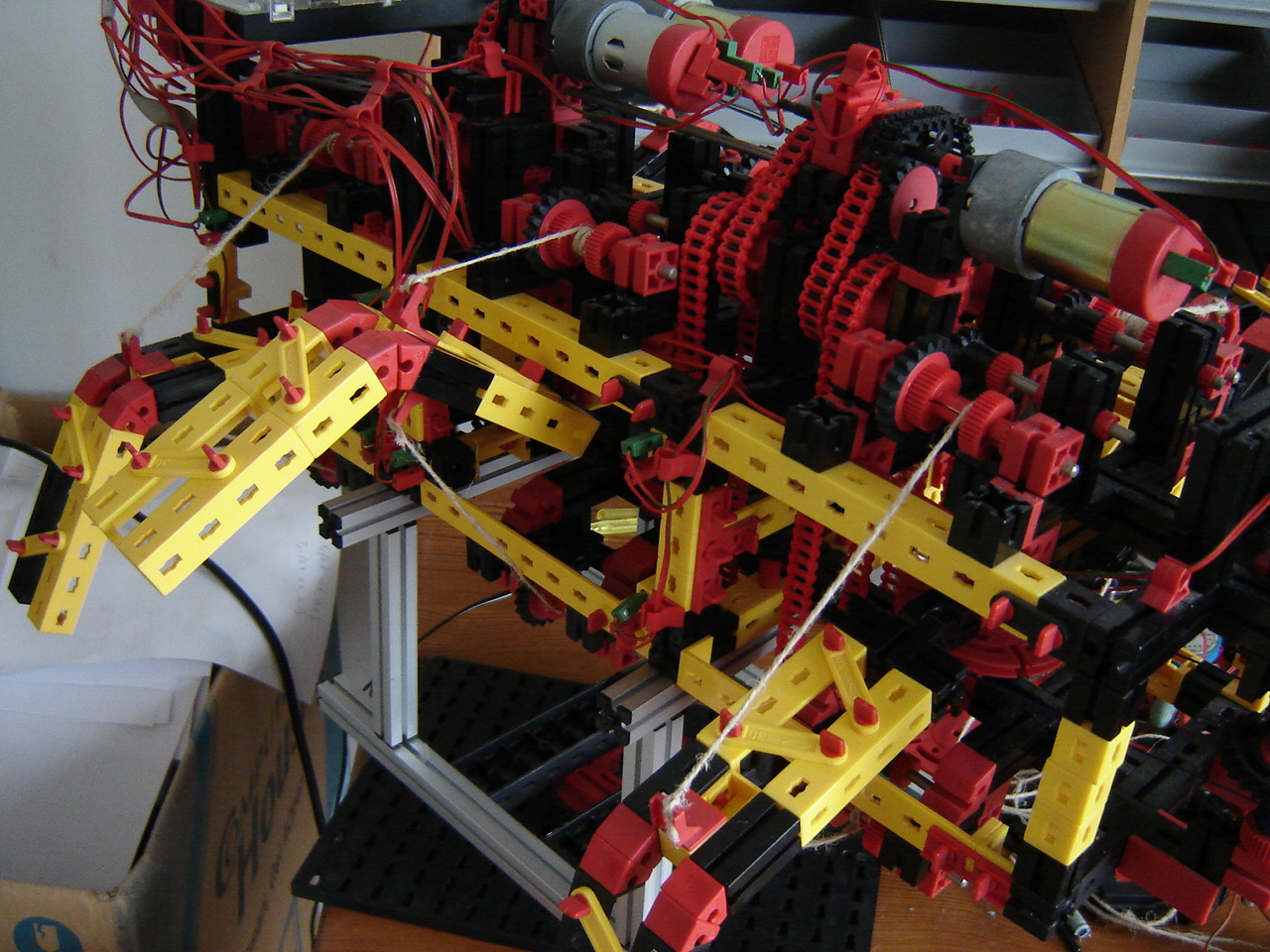
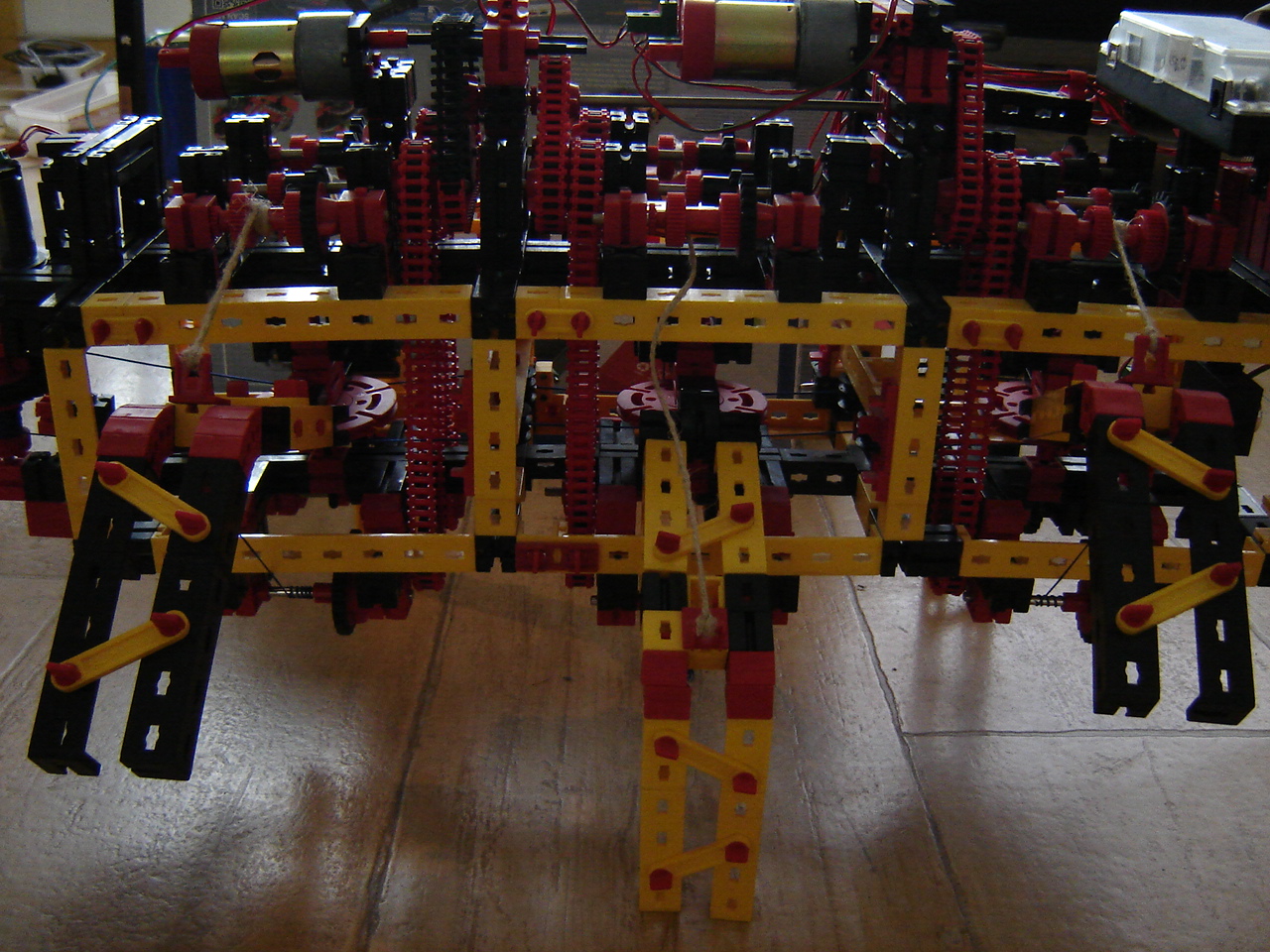
17 June 2015: current overview of the robot.
22 June 2015: Support for the leg.
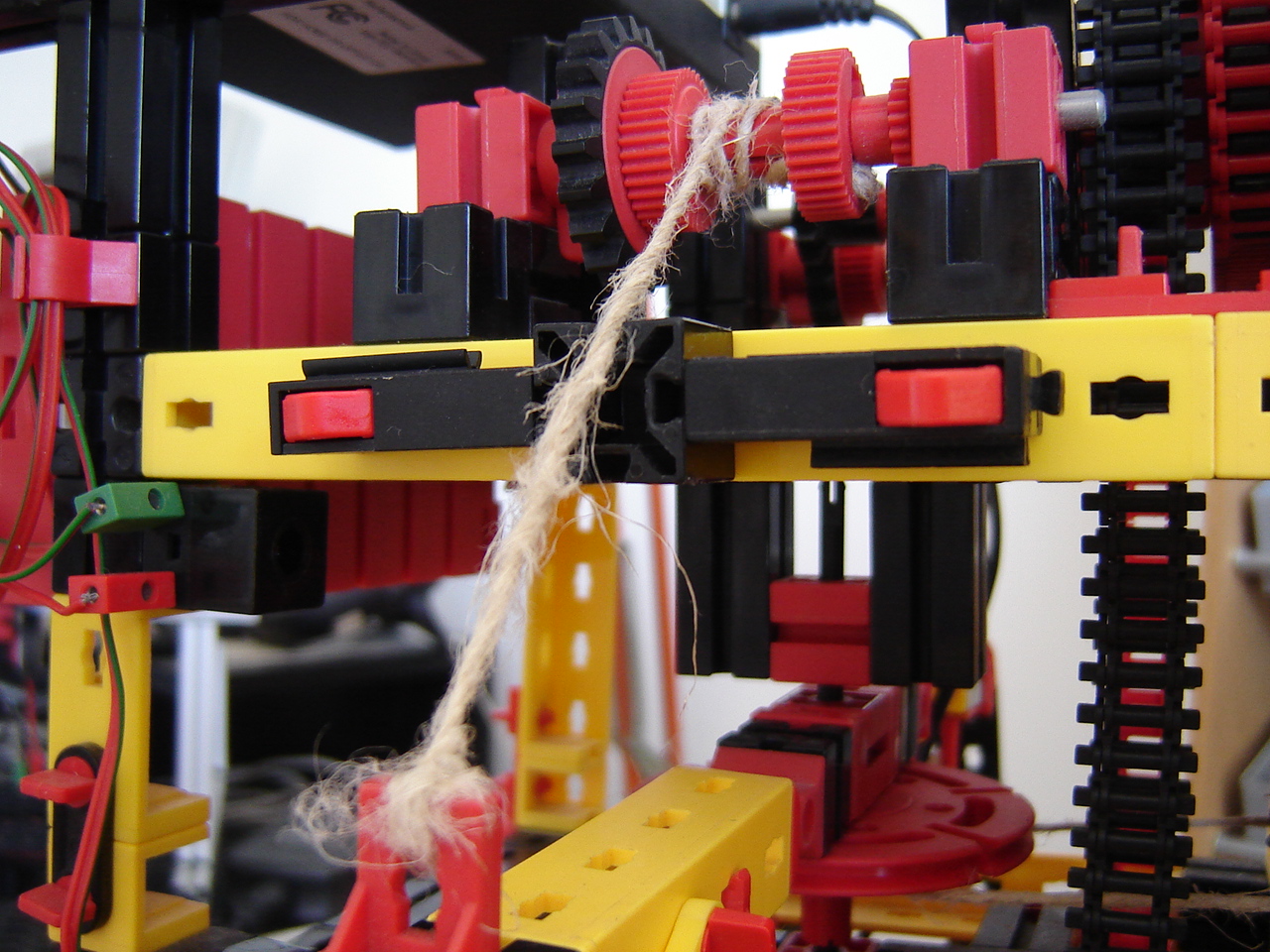
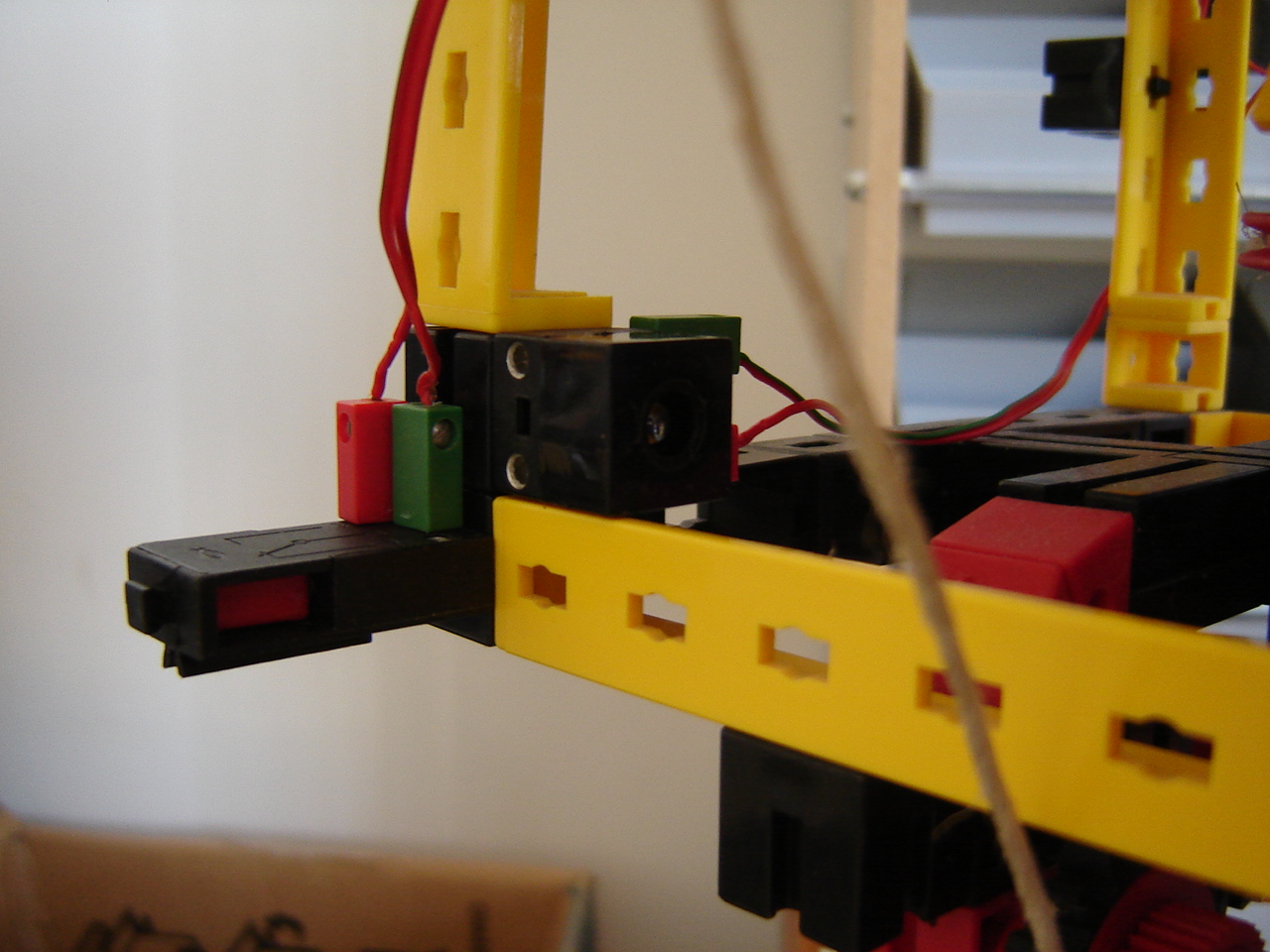
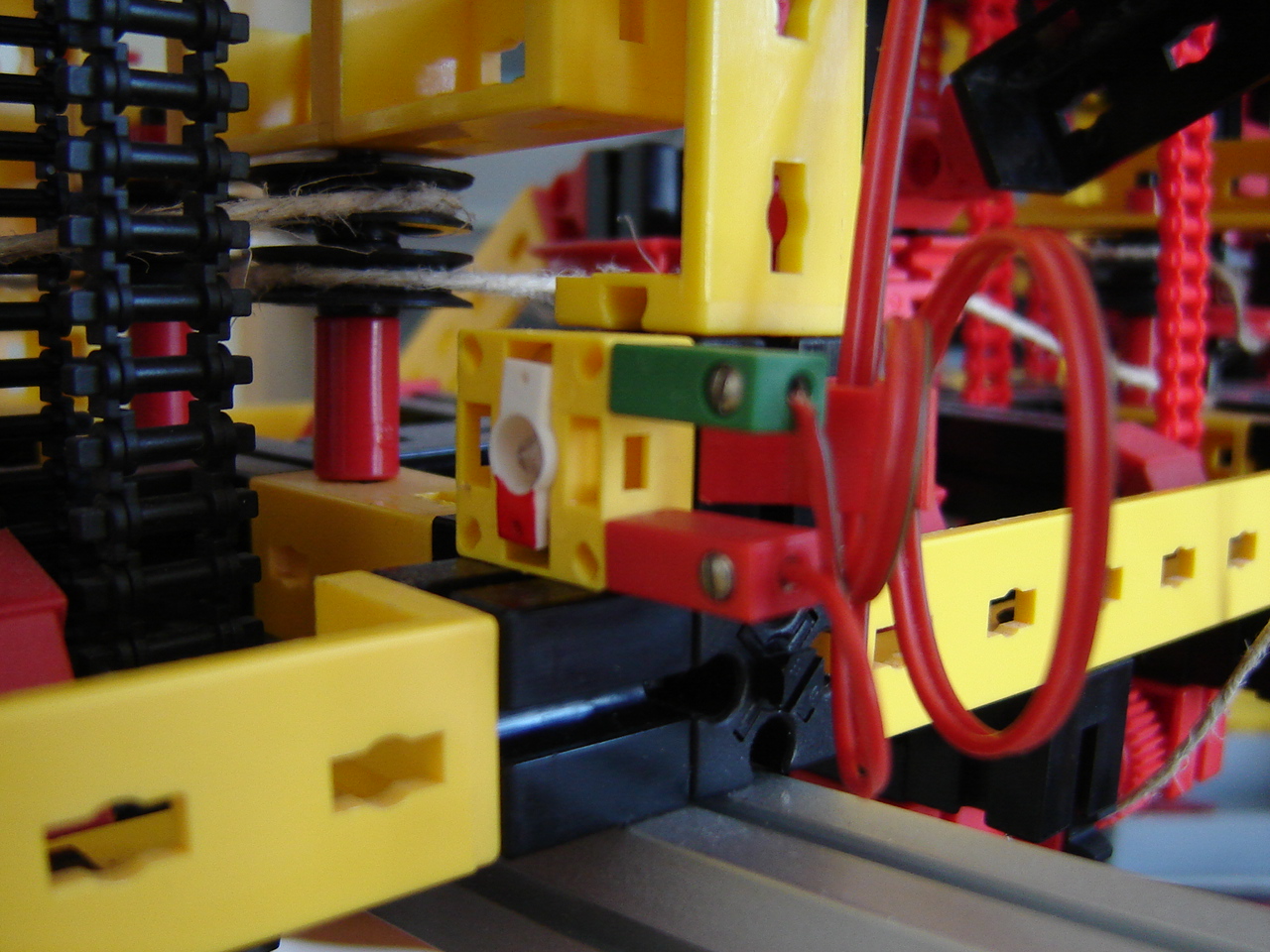
22 June 2015: Mechanical on/off switches.

22 June: The switches in position.
22 June 2015: The switches in position.
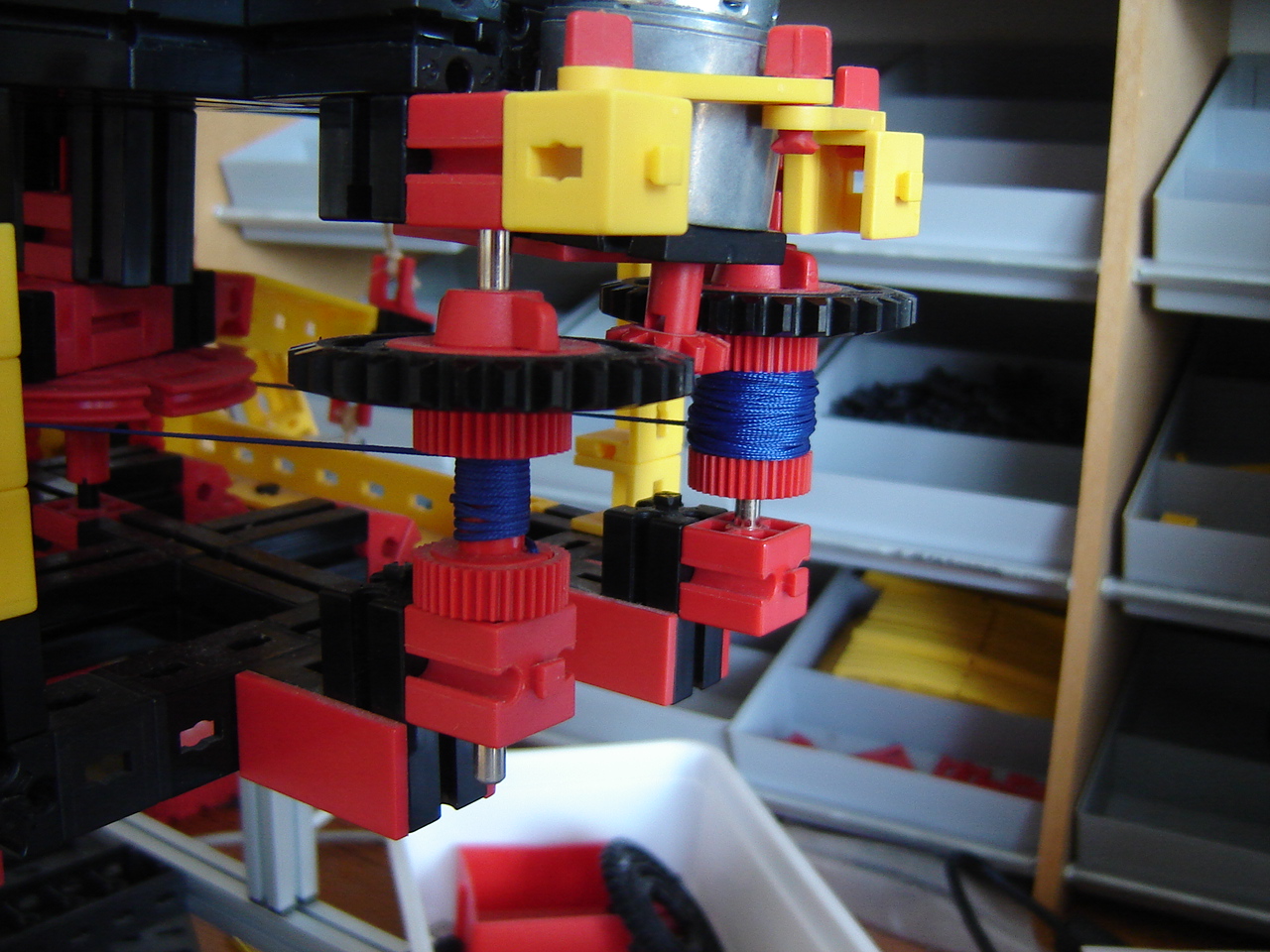
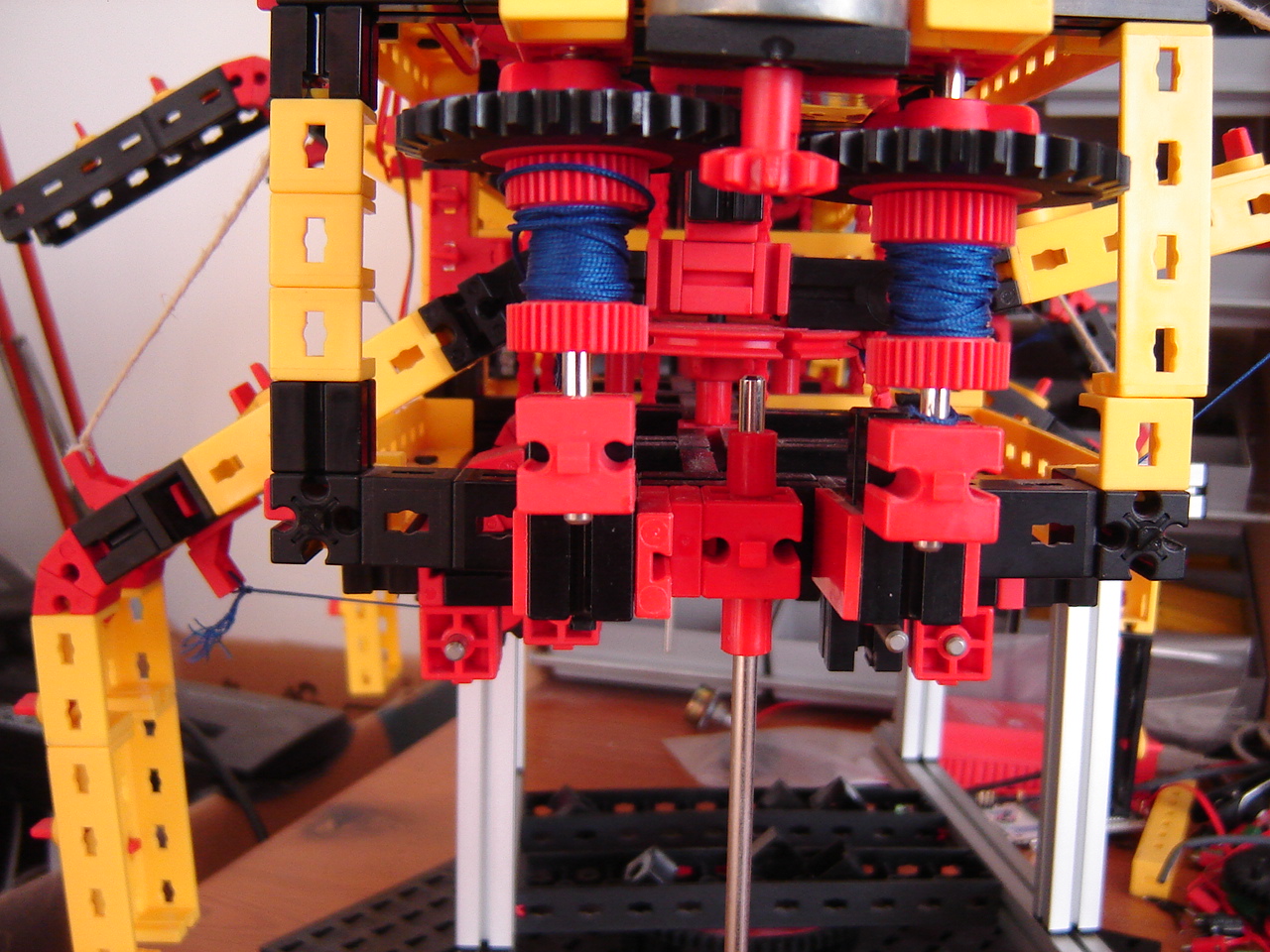
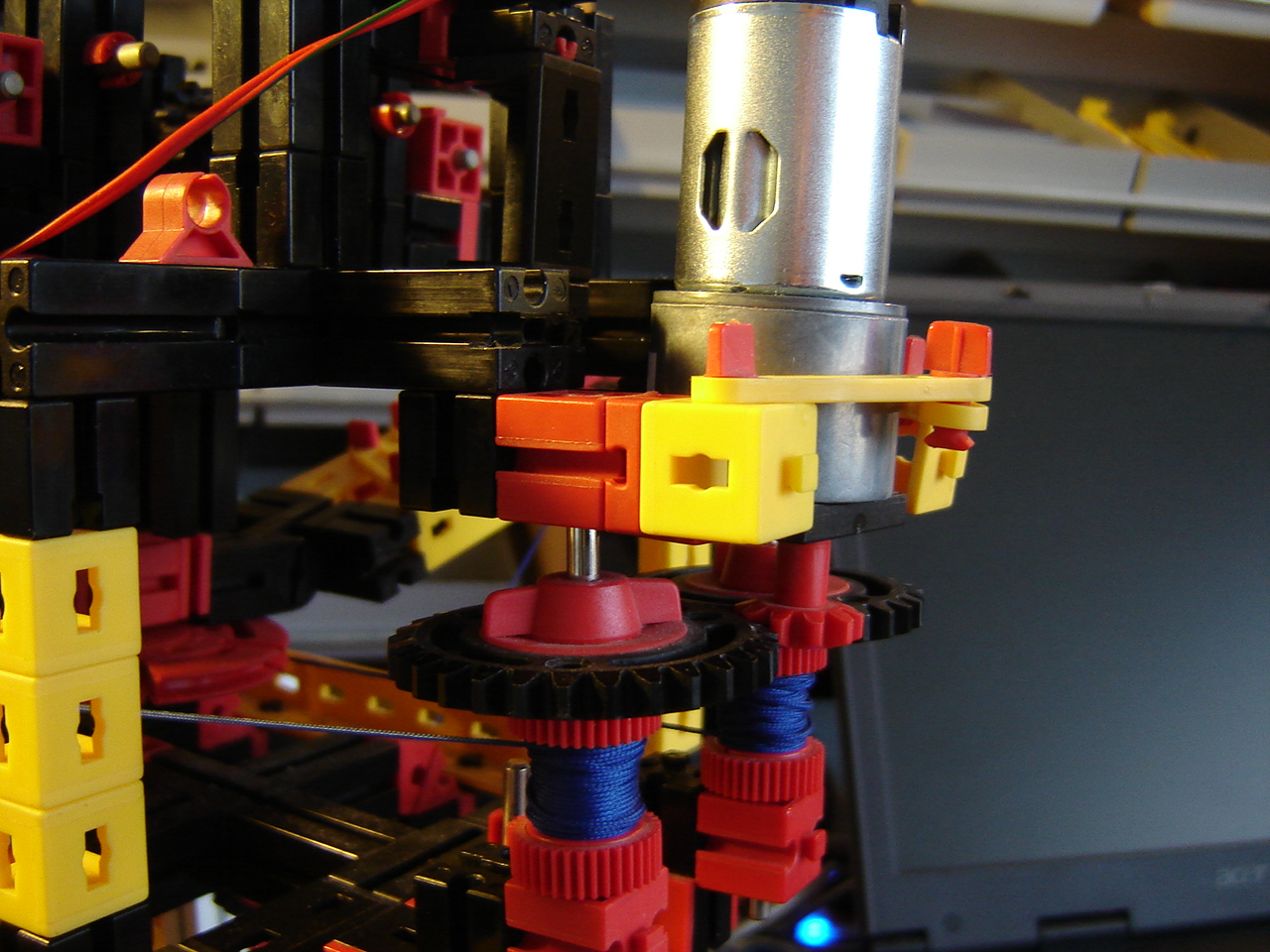
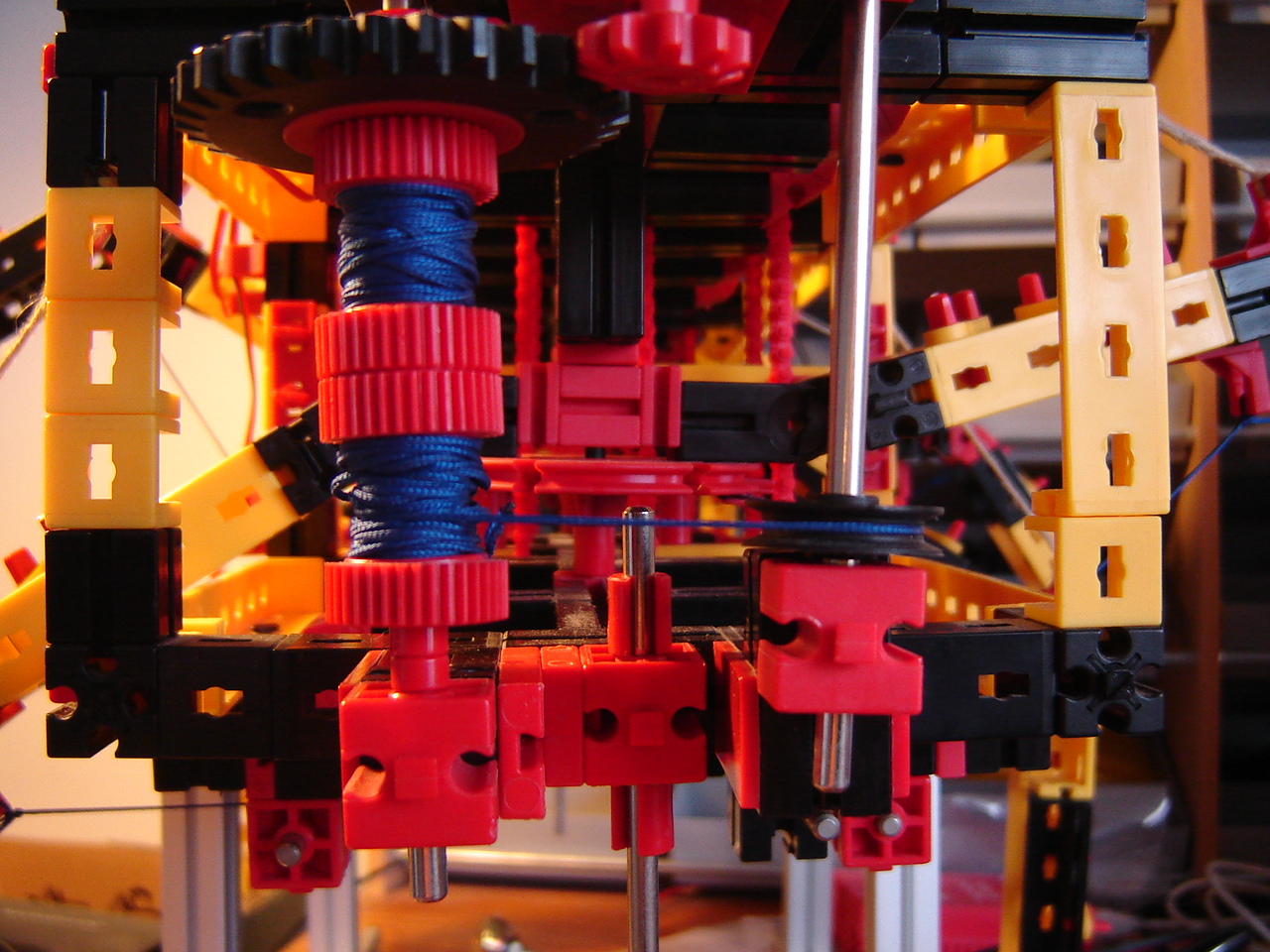
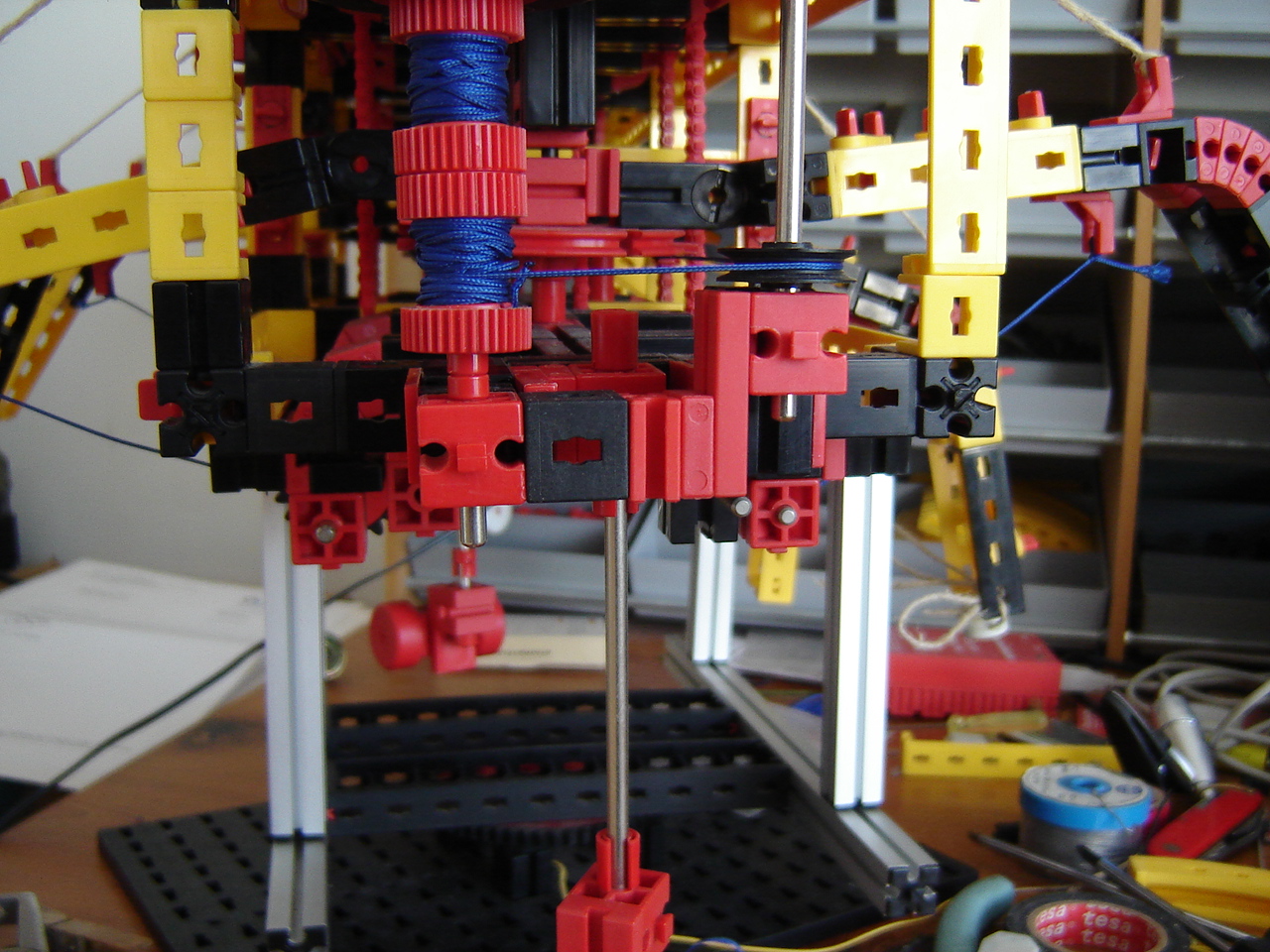
7 Sept 2015: Replaced the rope string by blue nylon:
motor end

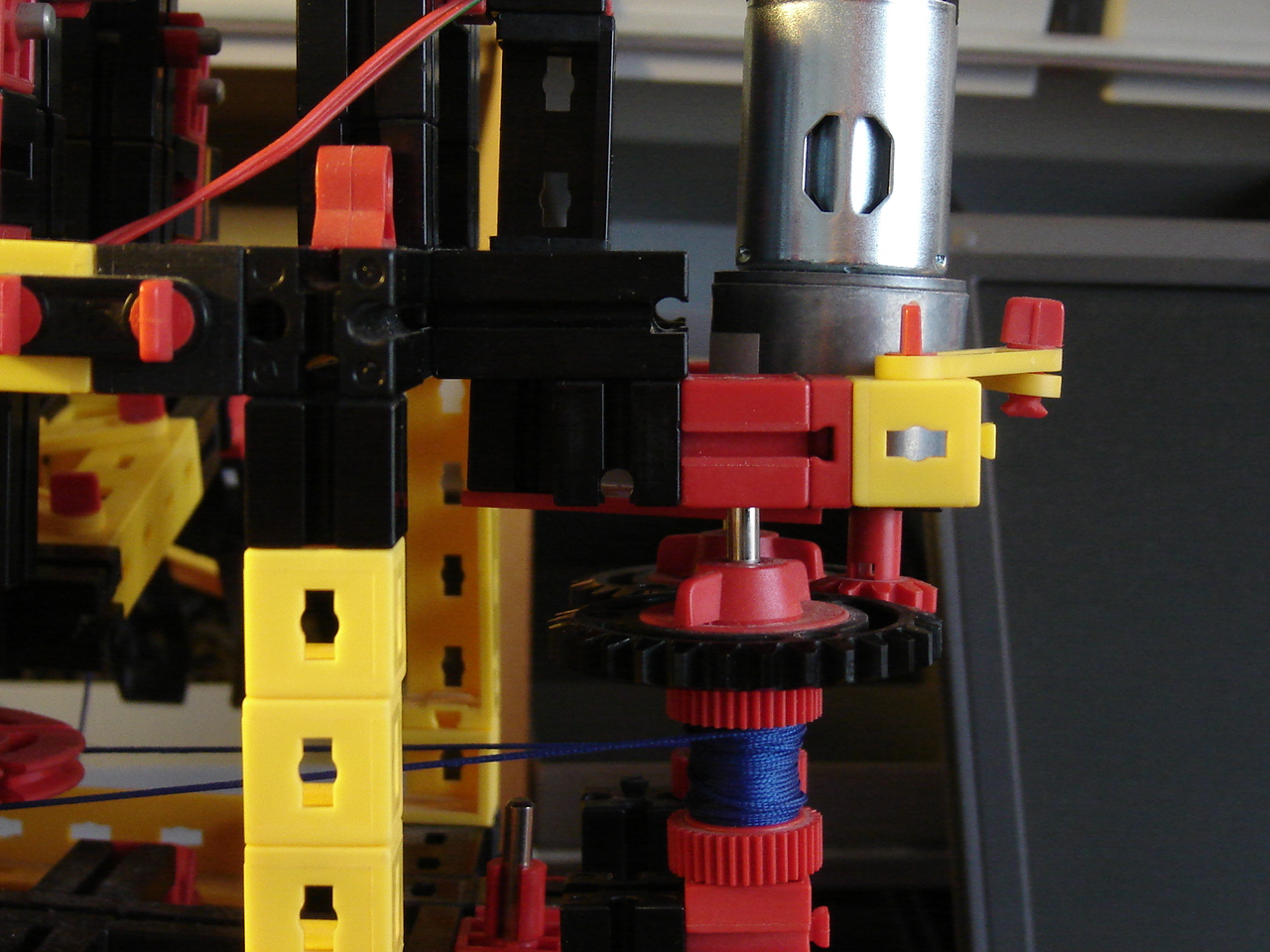
7 Sept 2015: Replaced the rope string by blue nylon: head
end

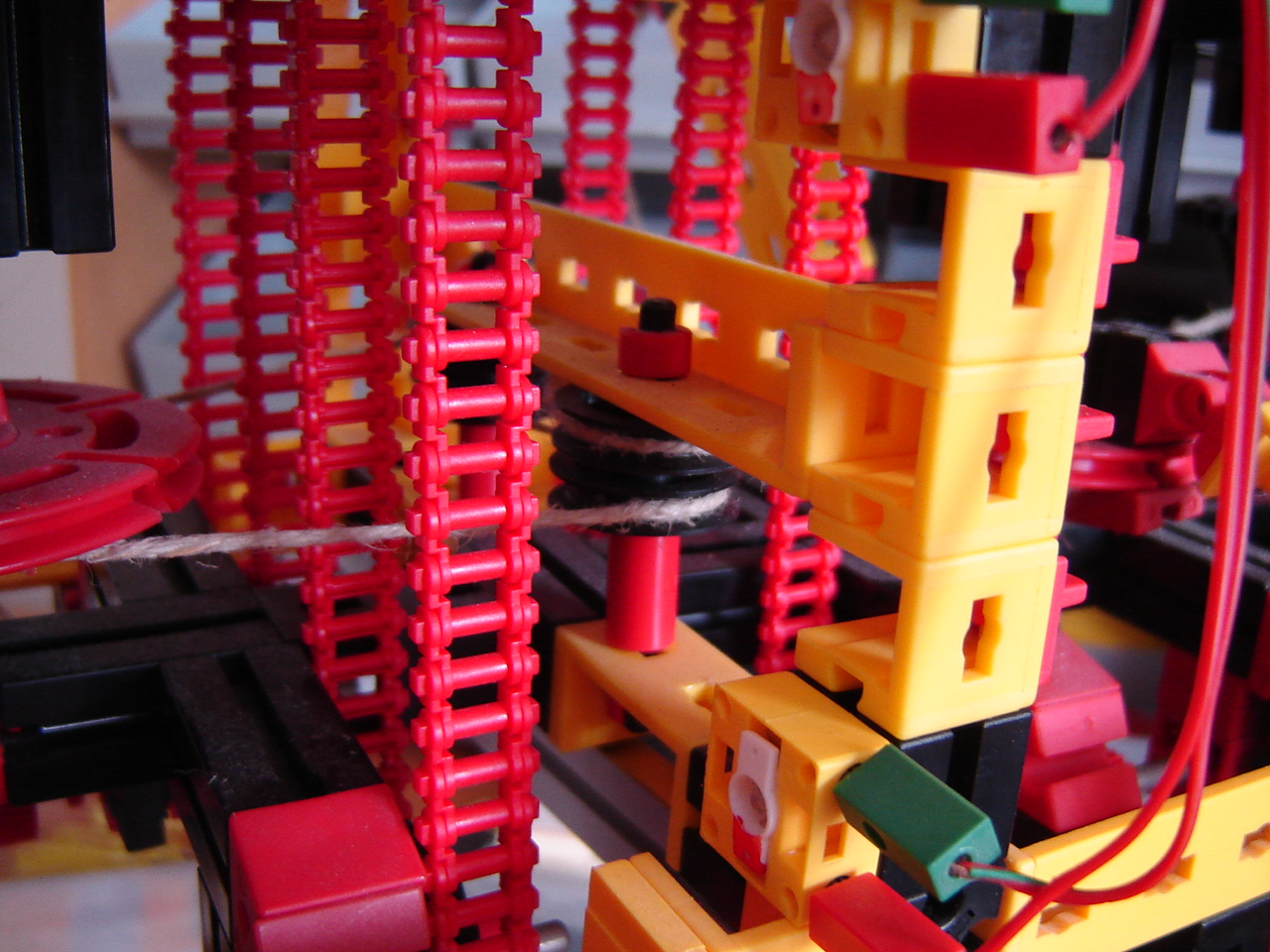
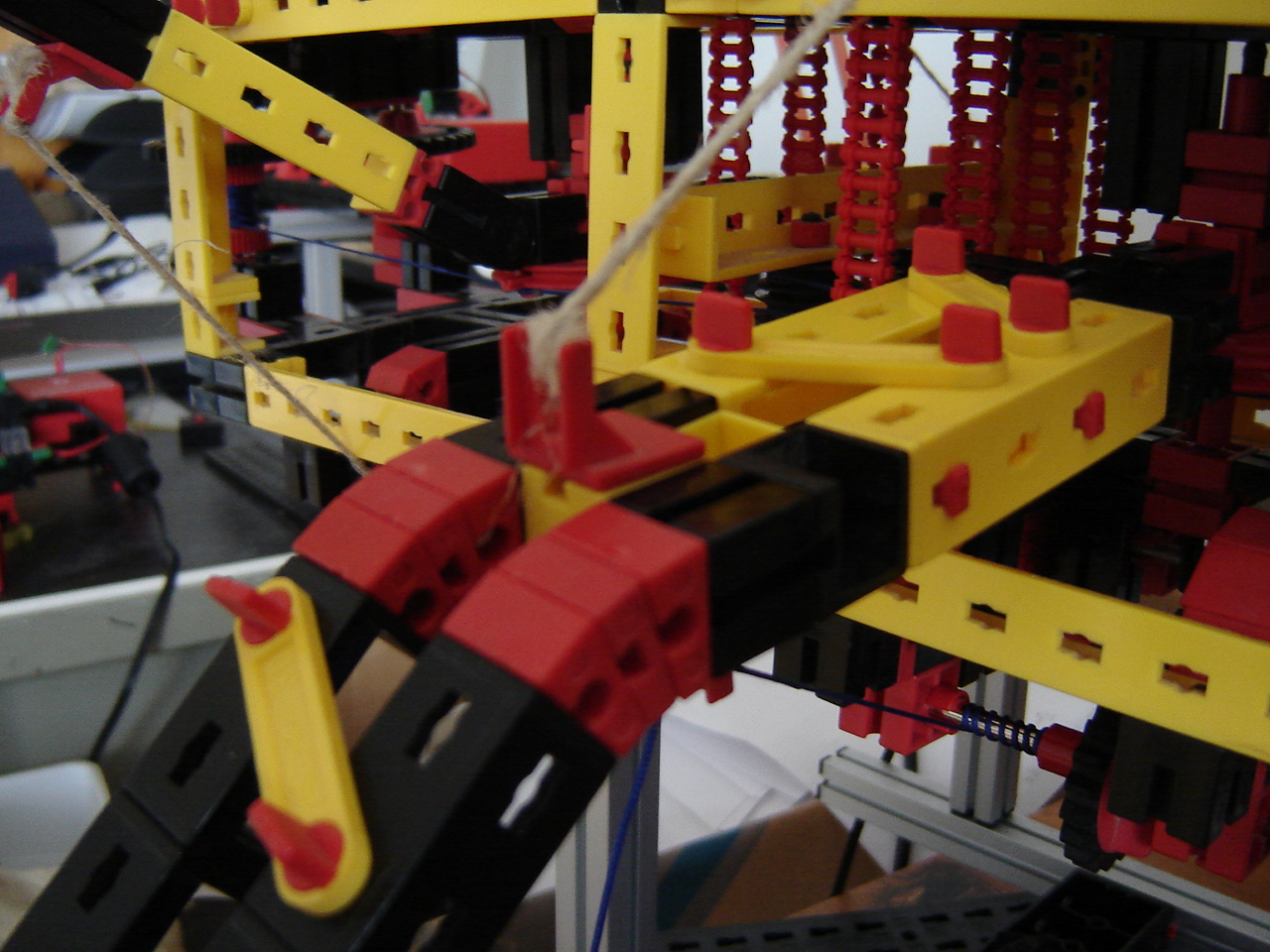
15 Sept 2015: Clove hitch on a spring cam for better
movement

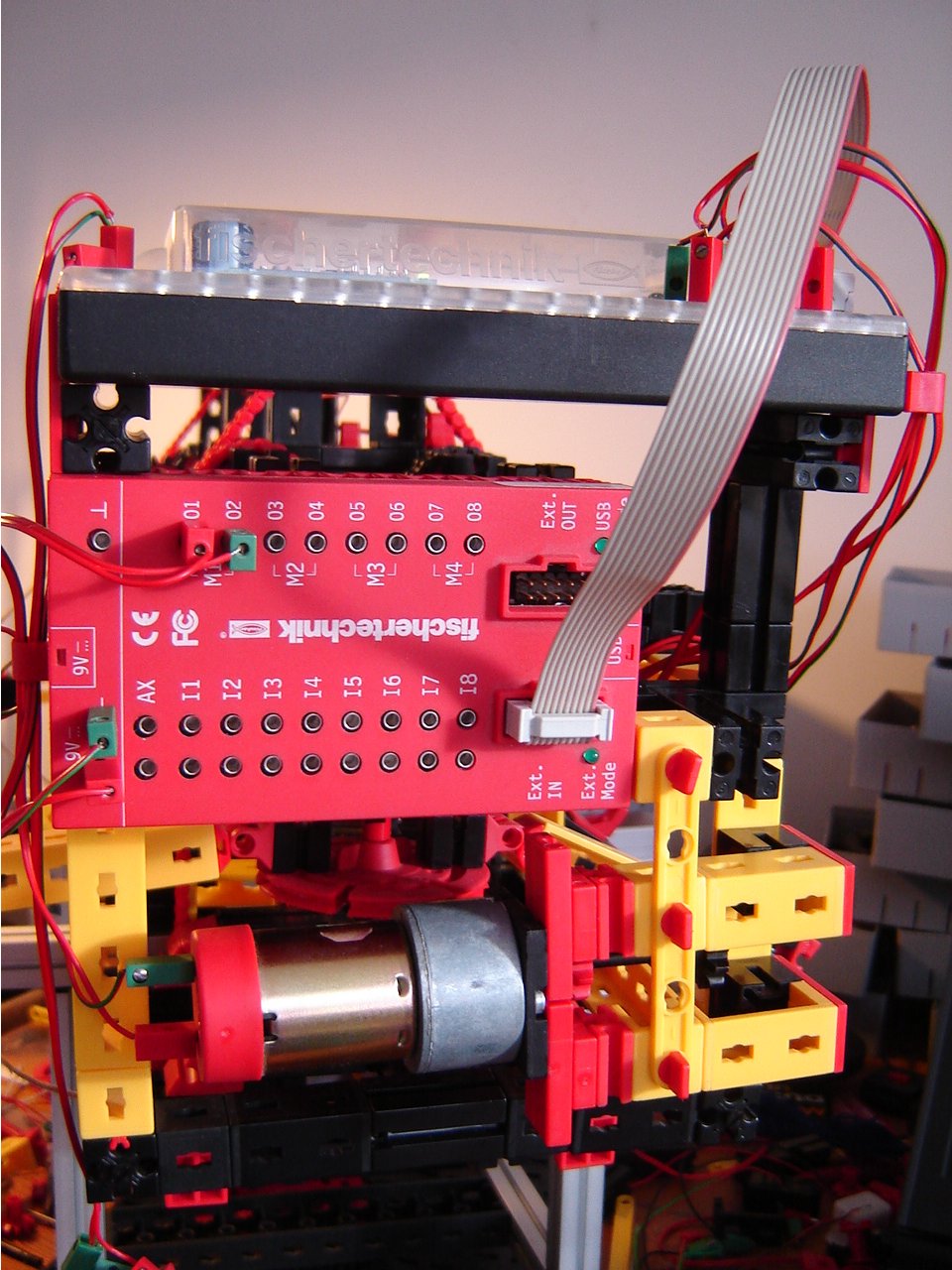
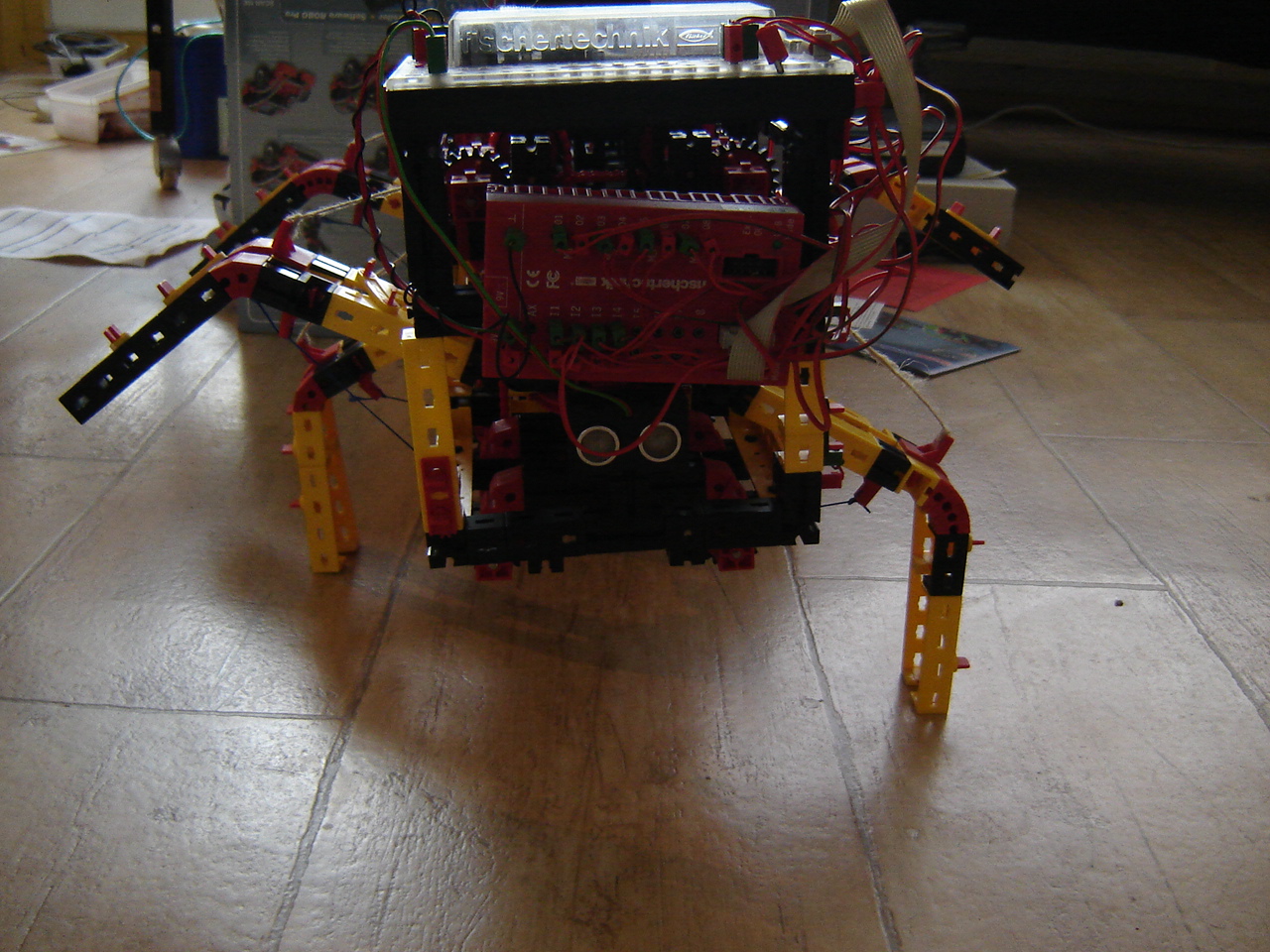
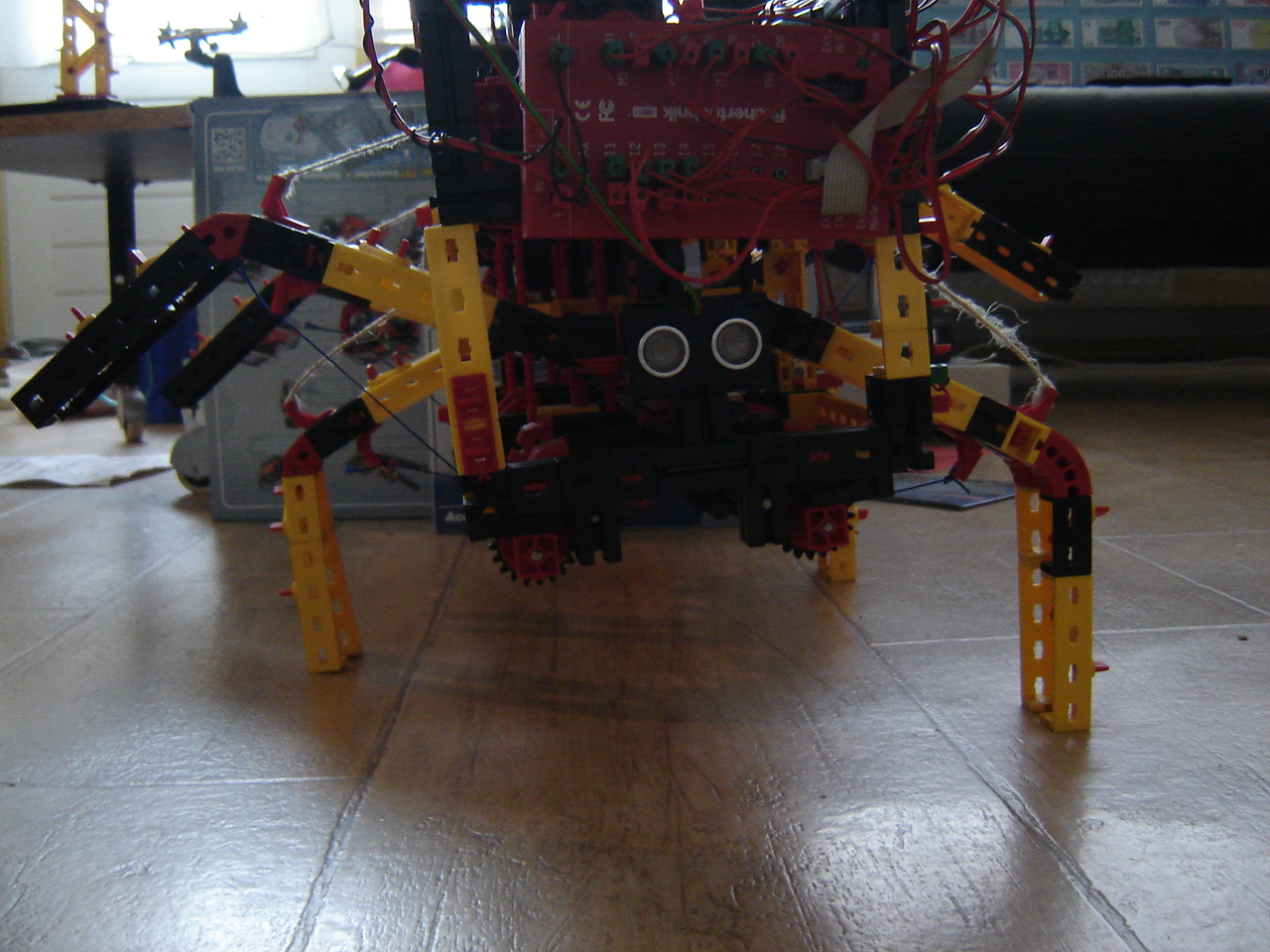
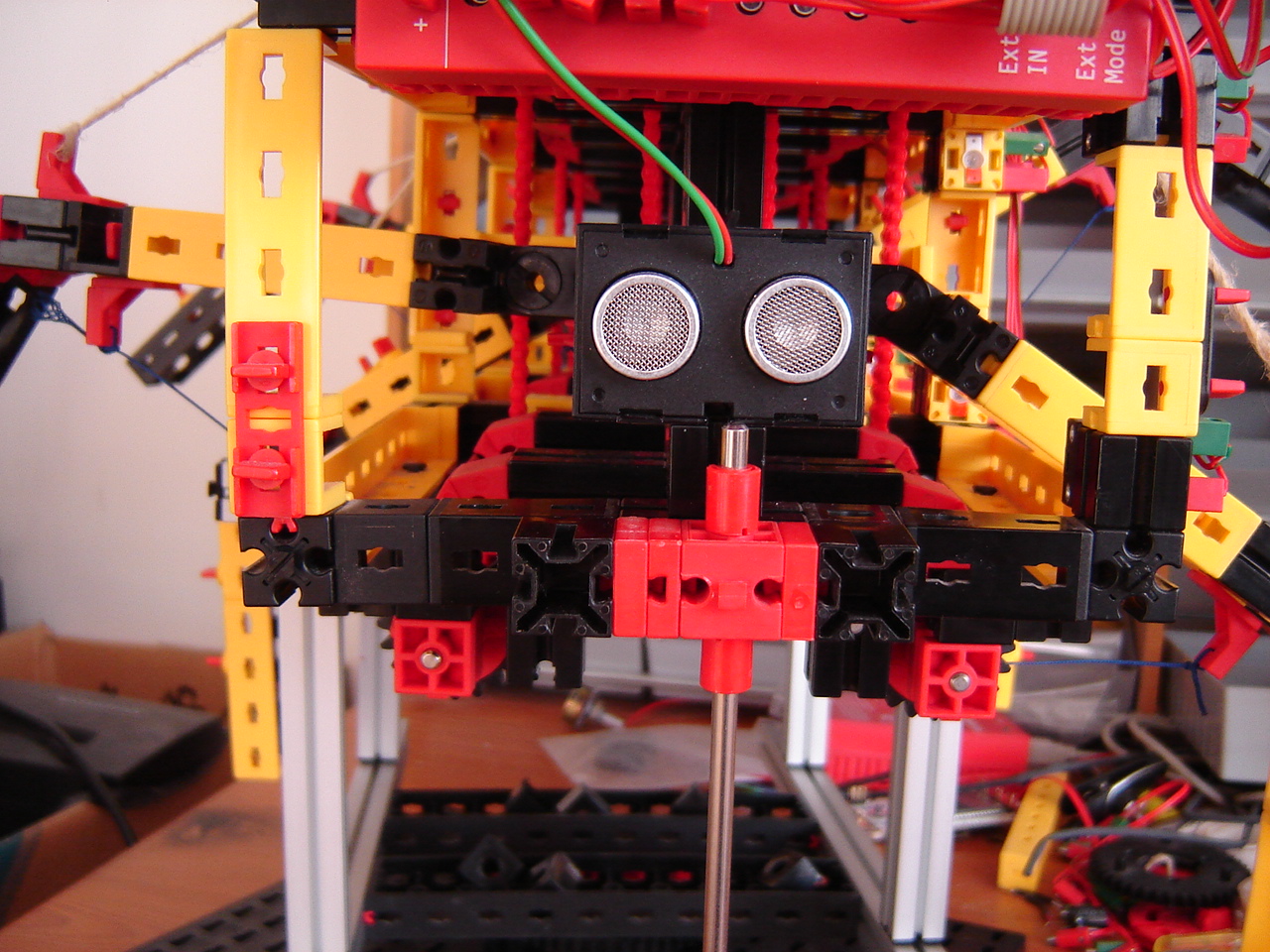
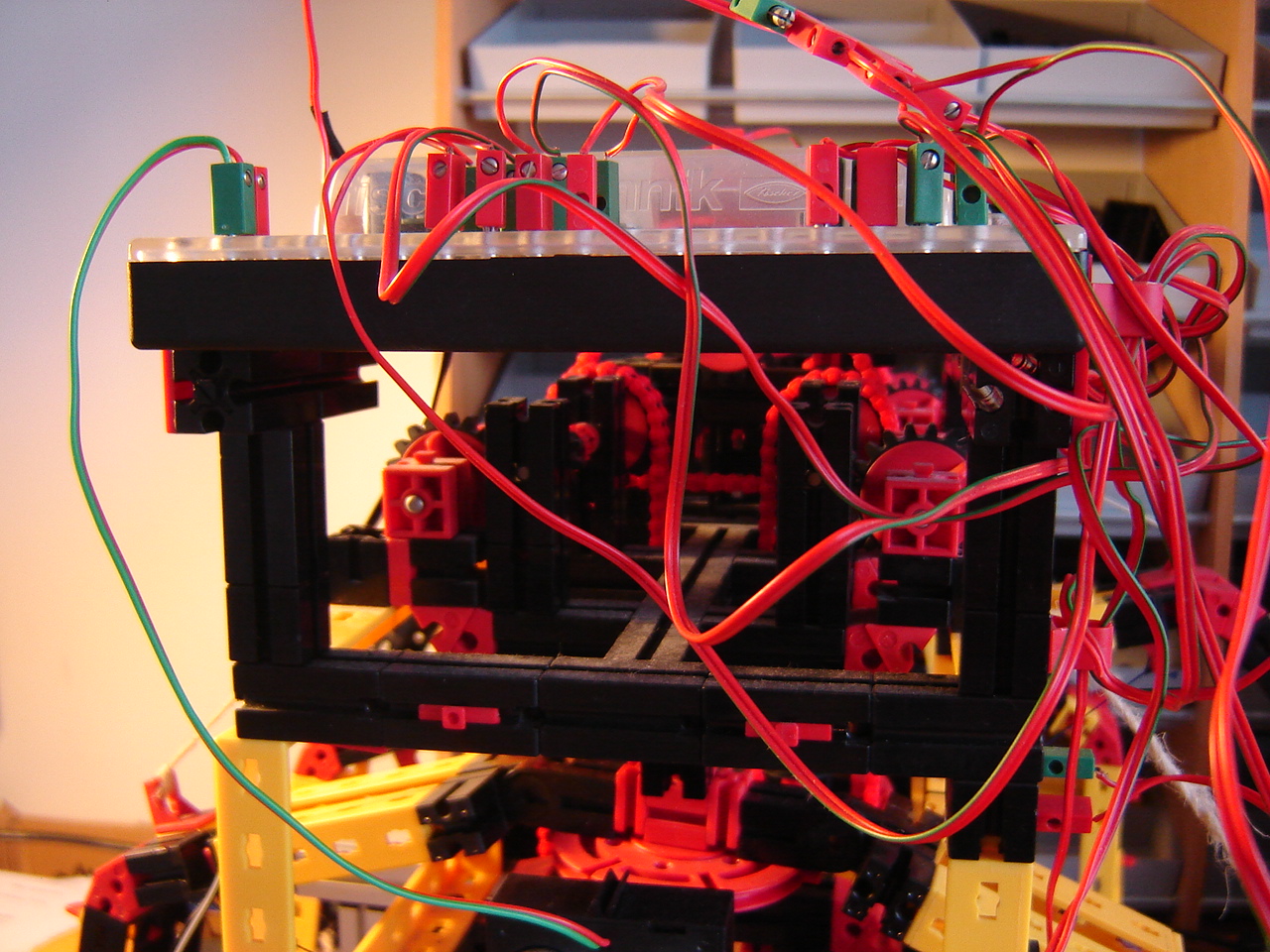
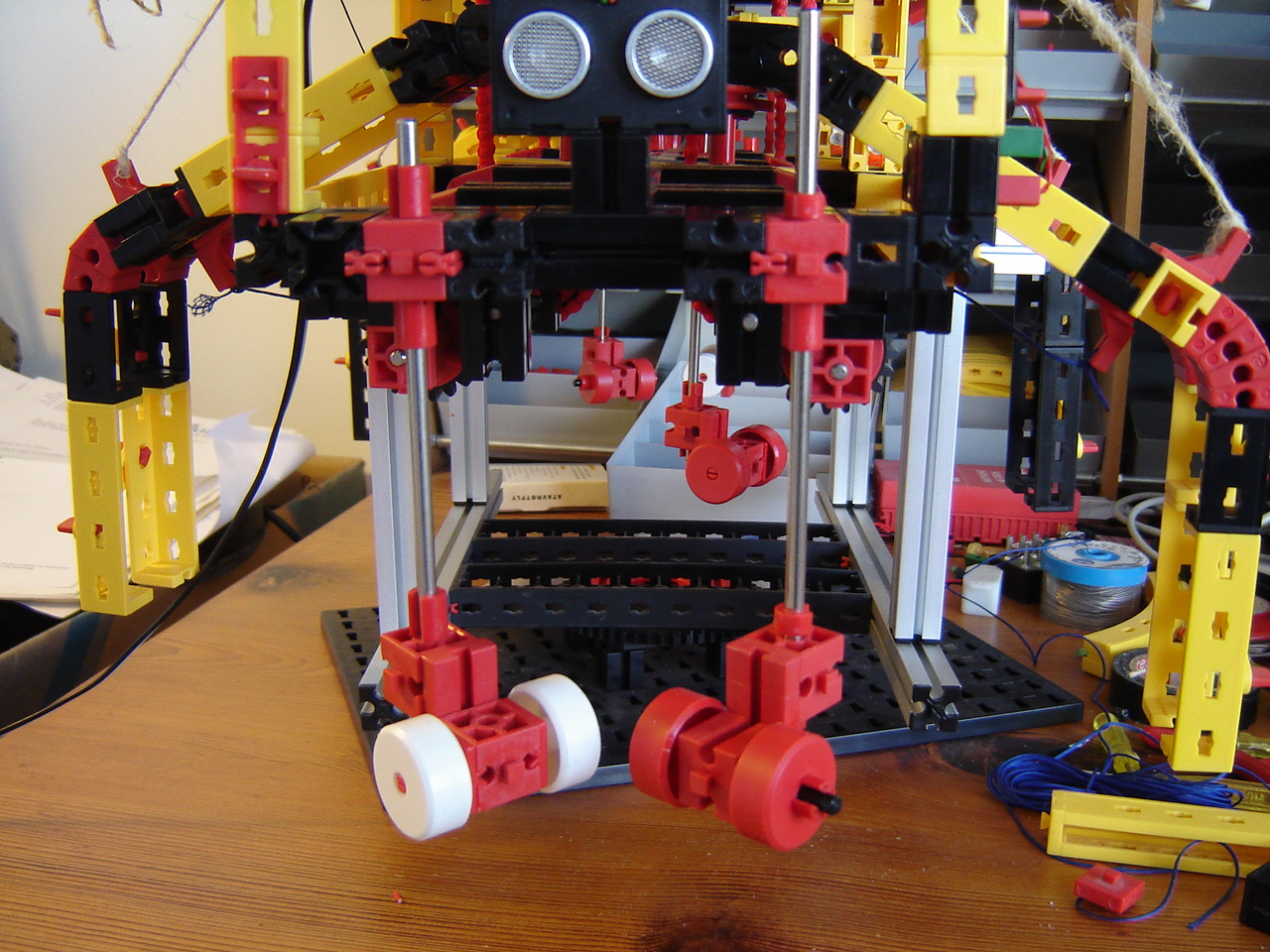
30 Sept 2015: Sonar added to the front
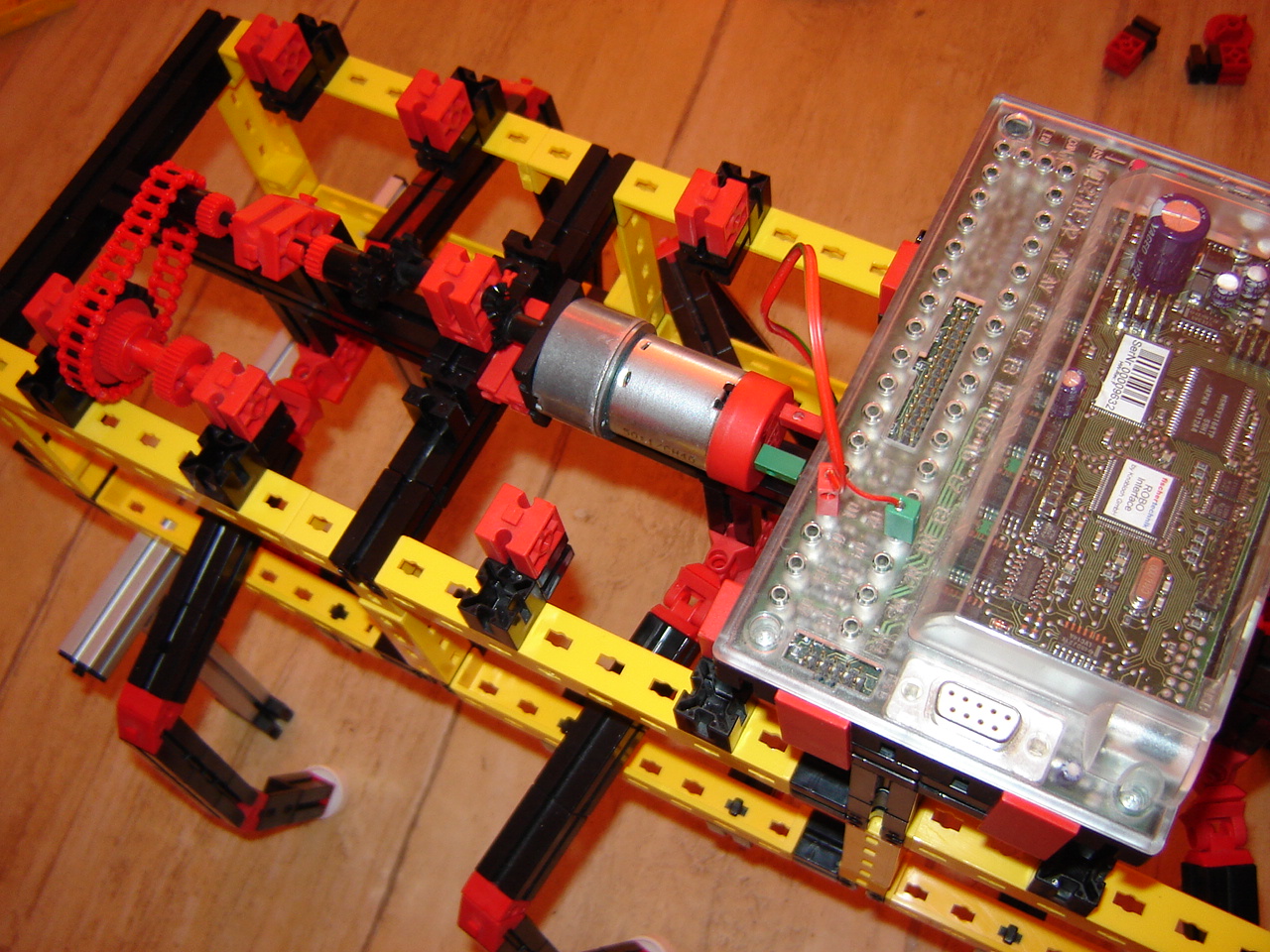
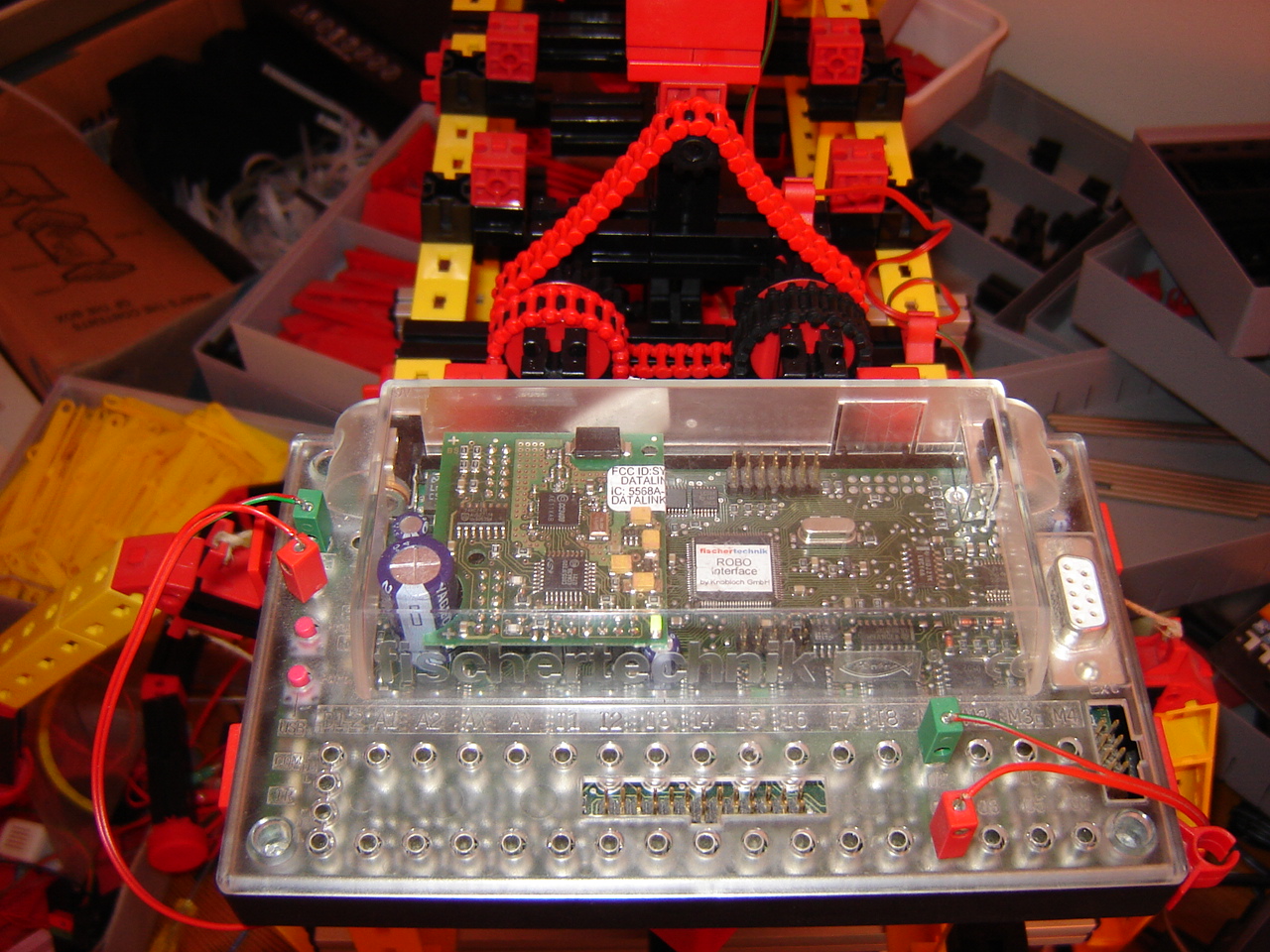
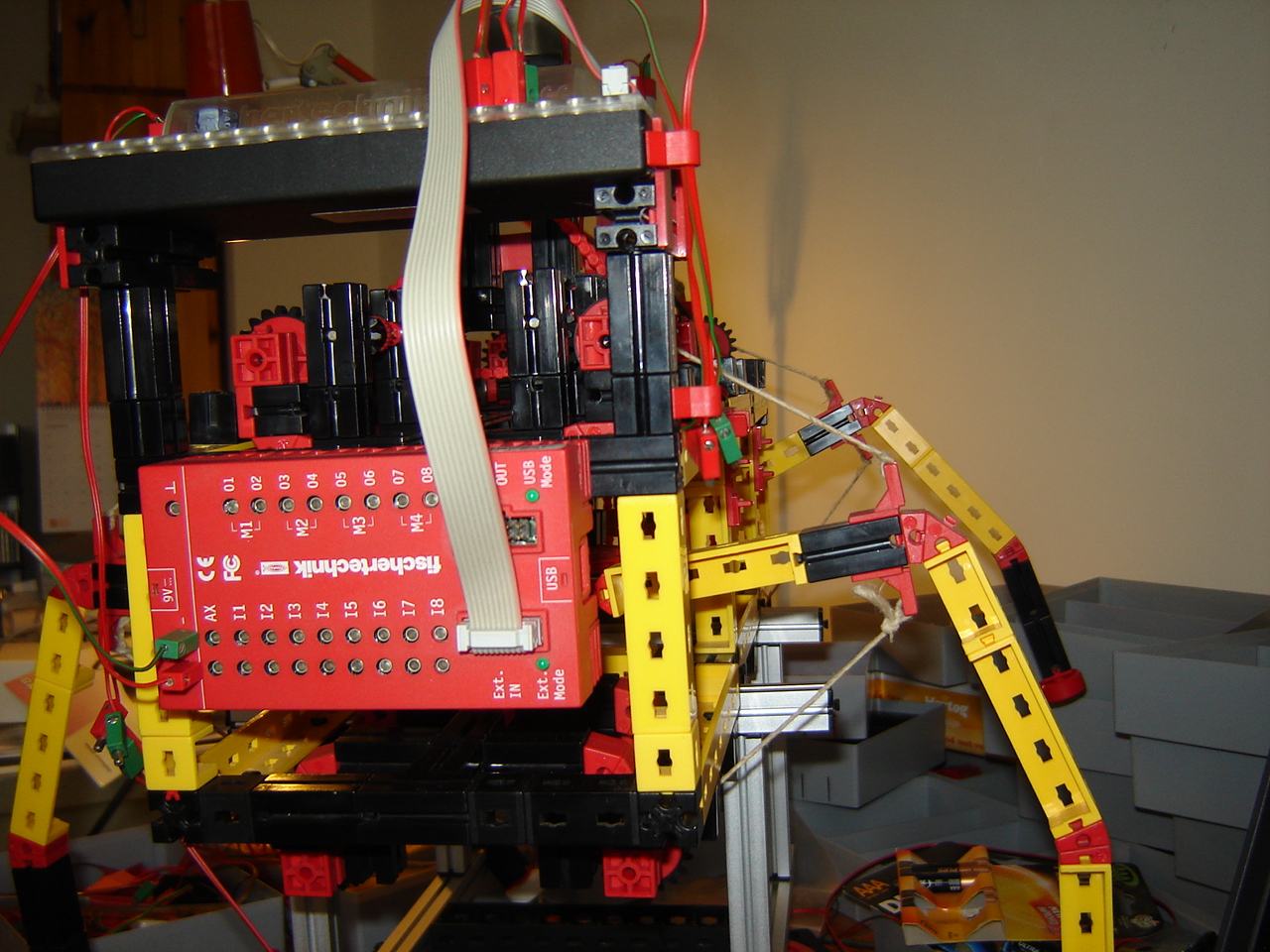
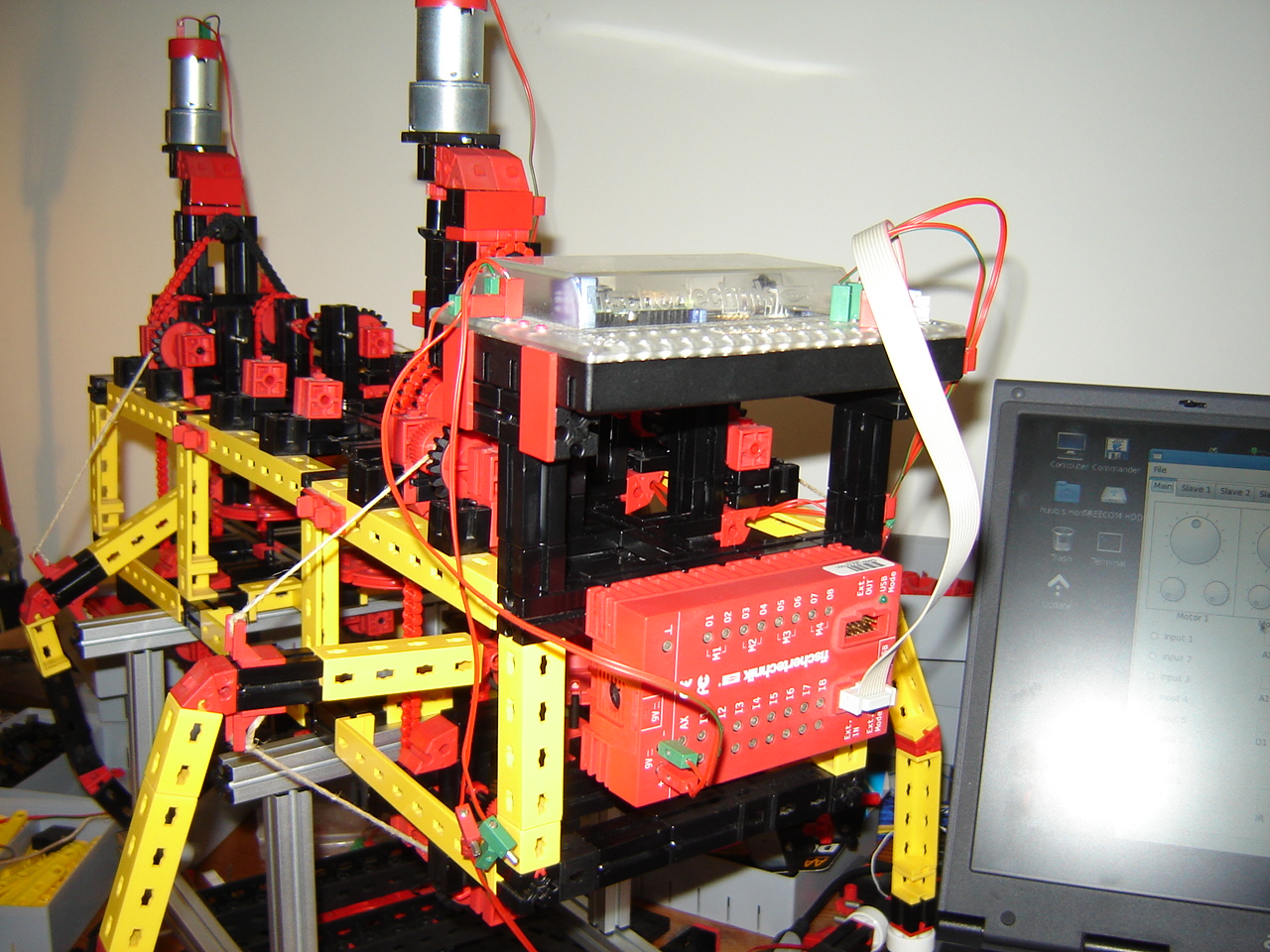
30 Sept 2015: Side view of sonar, interface extension and
RoboInterface on top.

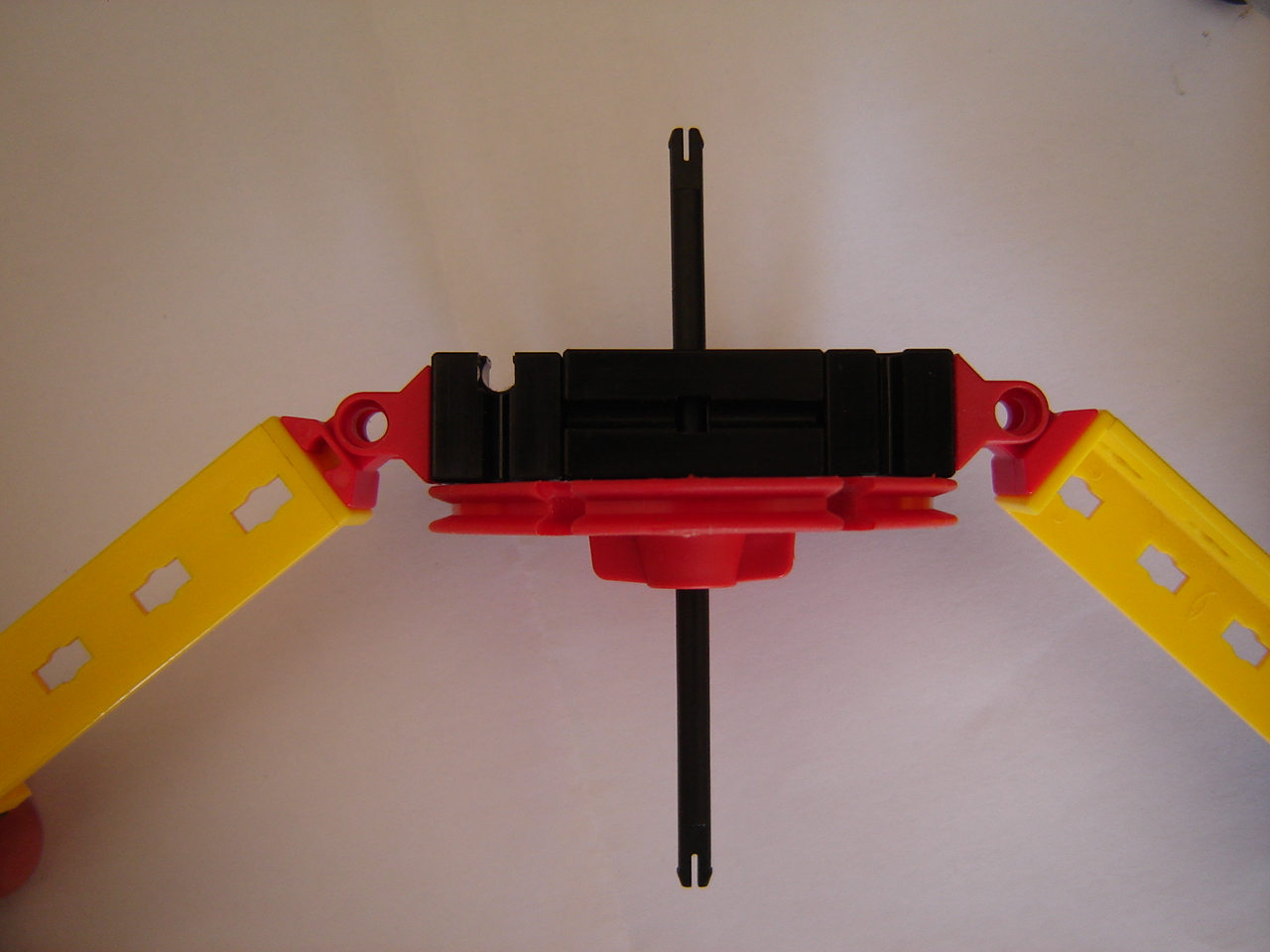
15 Oct 2015: Changing the hip hinge ..
15 Oct 2015: New hip hinge mounted into the robot
15 Oct 2015: New hip hinge on other side
15 Oct 2015: Another solution: broaden the leg
15 Oct 2015: Broaden the leg: view on the hinge
30 Oct 2015: More of the stabilized legs
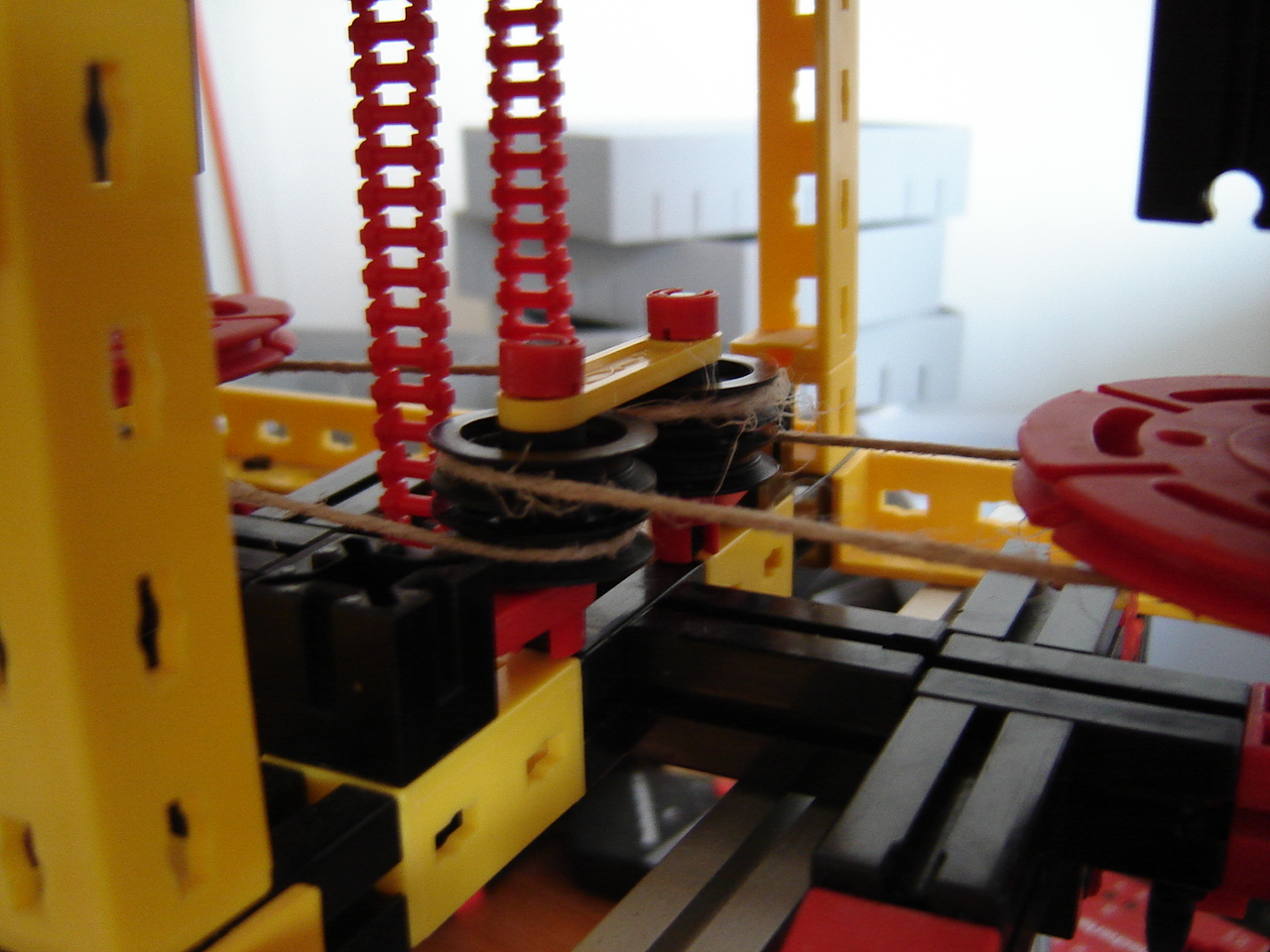
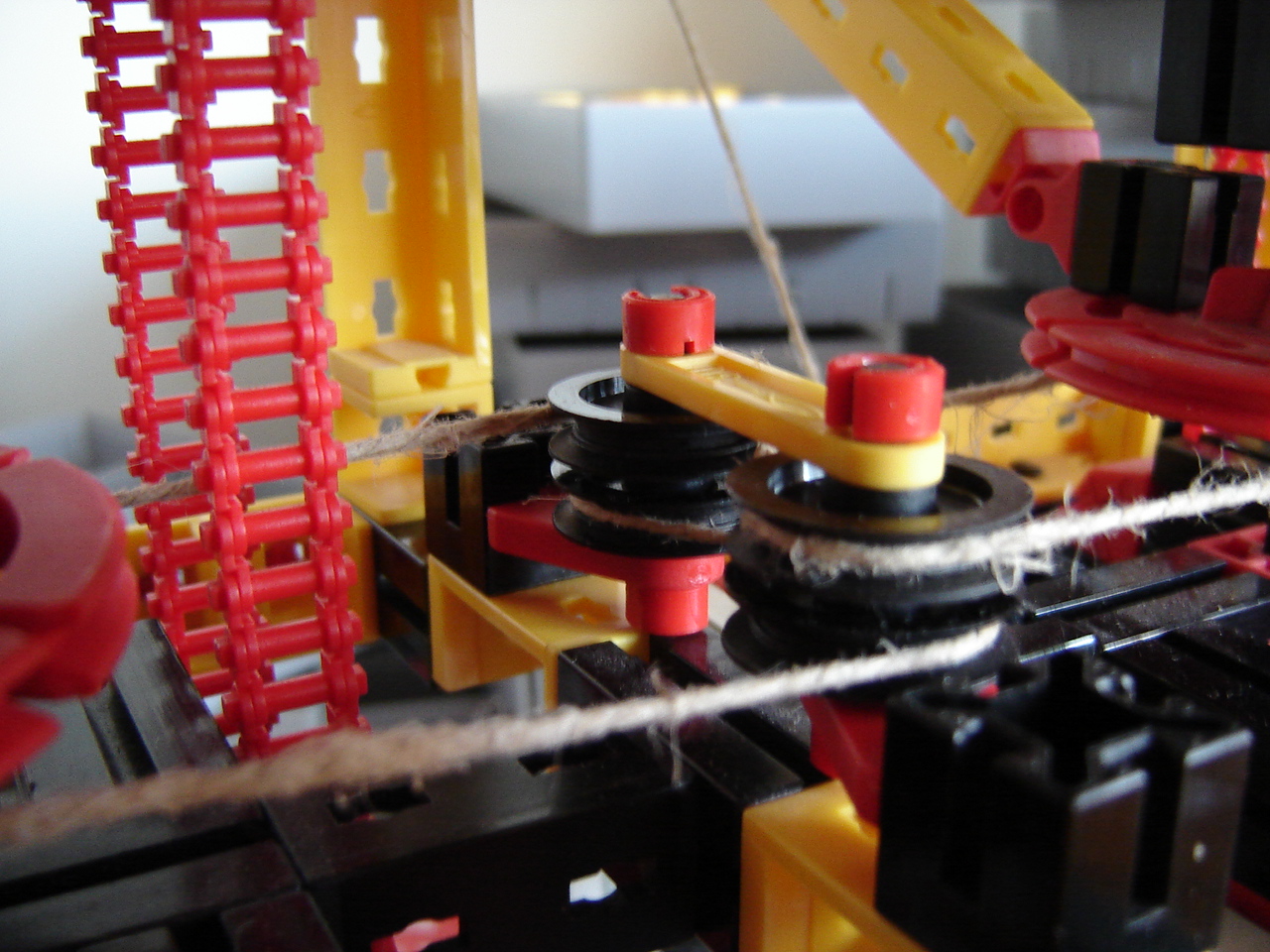
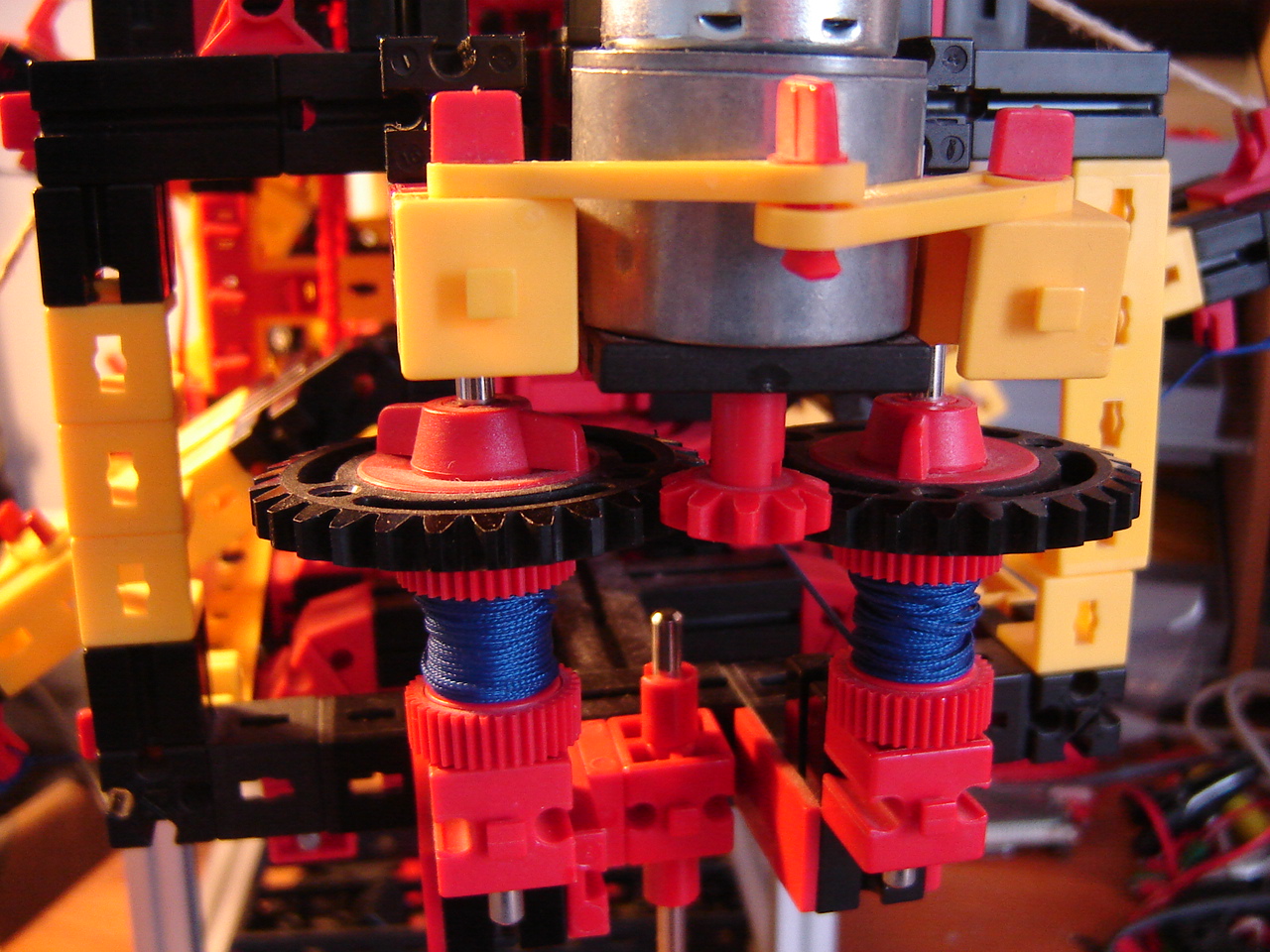
6 Nov 2015: New winch solution

6 Nov 2015: Leg reconstruction
6 Nov 2015: Connected after reconstruction
13 Nov 2015: Continued reconstruction.

20 Nov 2015: 2 chain links taken out.
27 Nov 2015: All legs are modified for broad ones: 1
side.
27 Nov 2015: All legs are modified for broad ones: other
side.
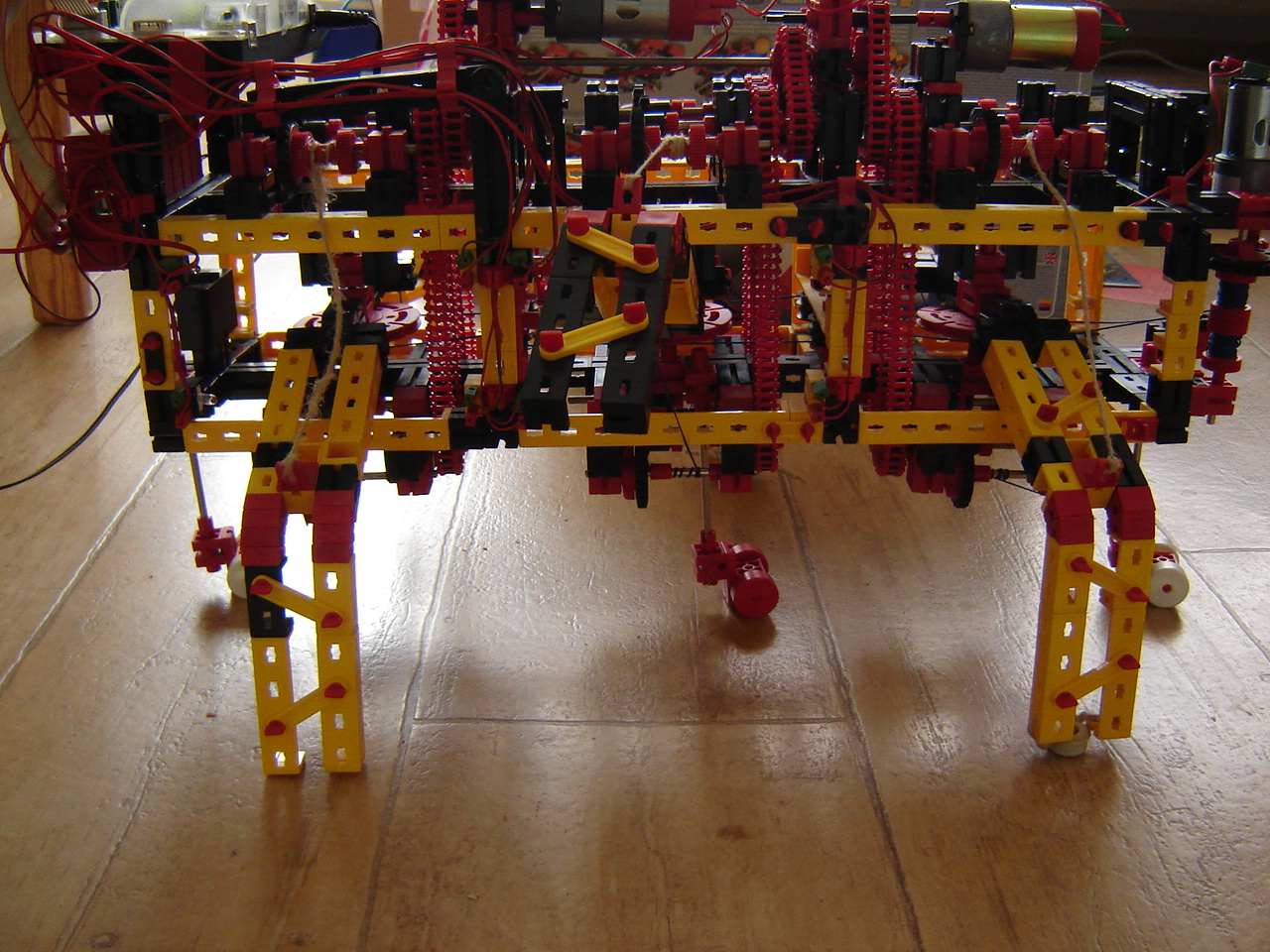
2 Dec 2015: Mirft can finally stand on its feet!
2 Dec 2015: Mirft can finally stand on its feet!
2 Dec 2015: Mirft can finally stand on its feet!
11 Dec 2015: The vertical chains are not equally long..
11 Dec 2015: The vertical chains are now the same and
equally long..
11 Dec 2015: The top chains are now equally long..
11 Dec 2015: A top chain not long enough..oops
11 Dec 2015: A top chain too long ?..oops
18 Dec 2015: Cobwheel needs to be tightened..
25 Dec 2015: In need for different gear setup
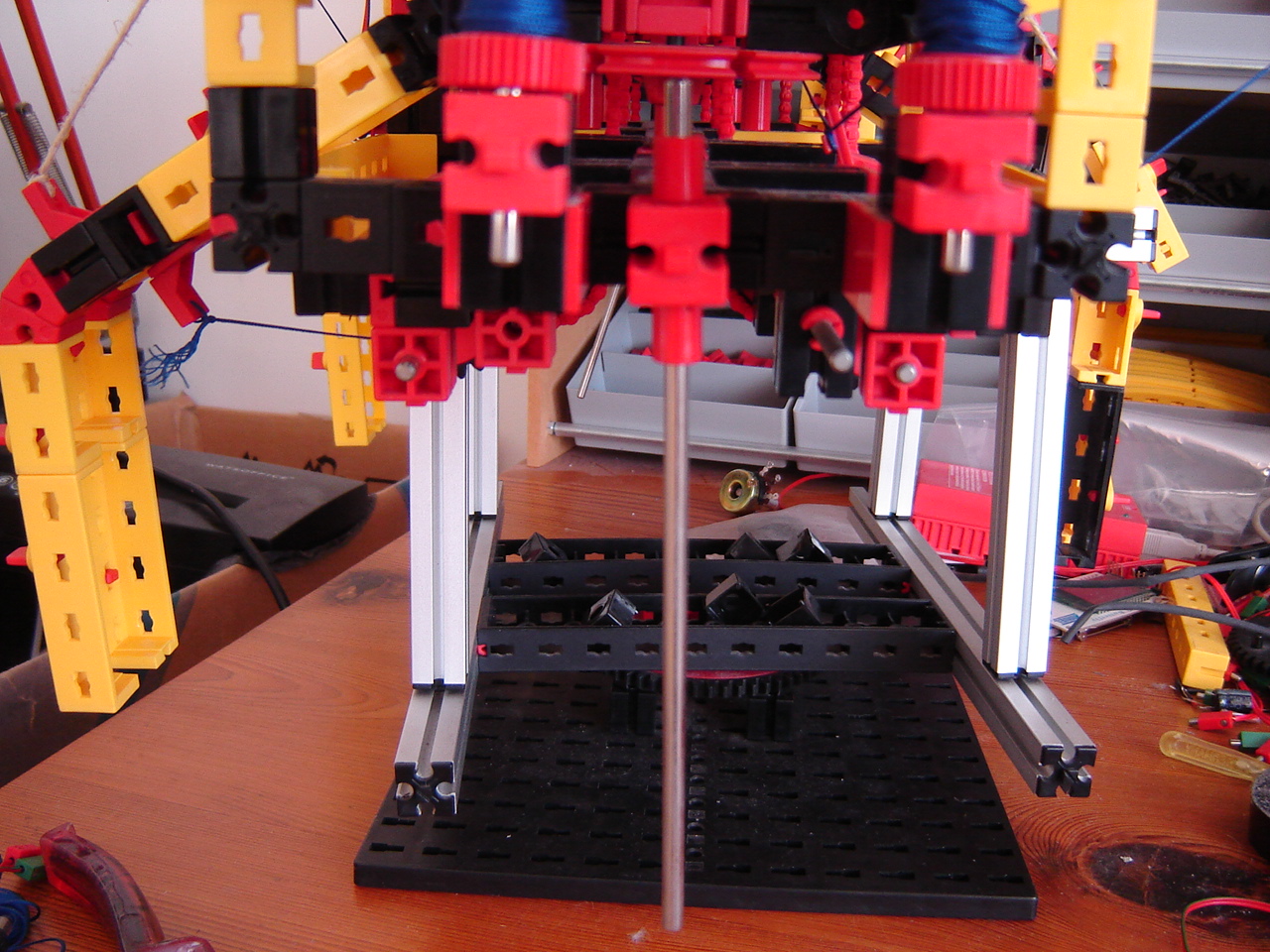
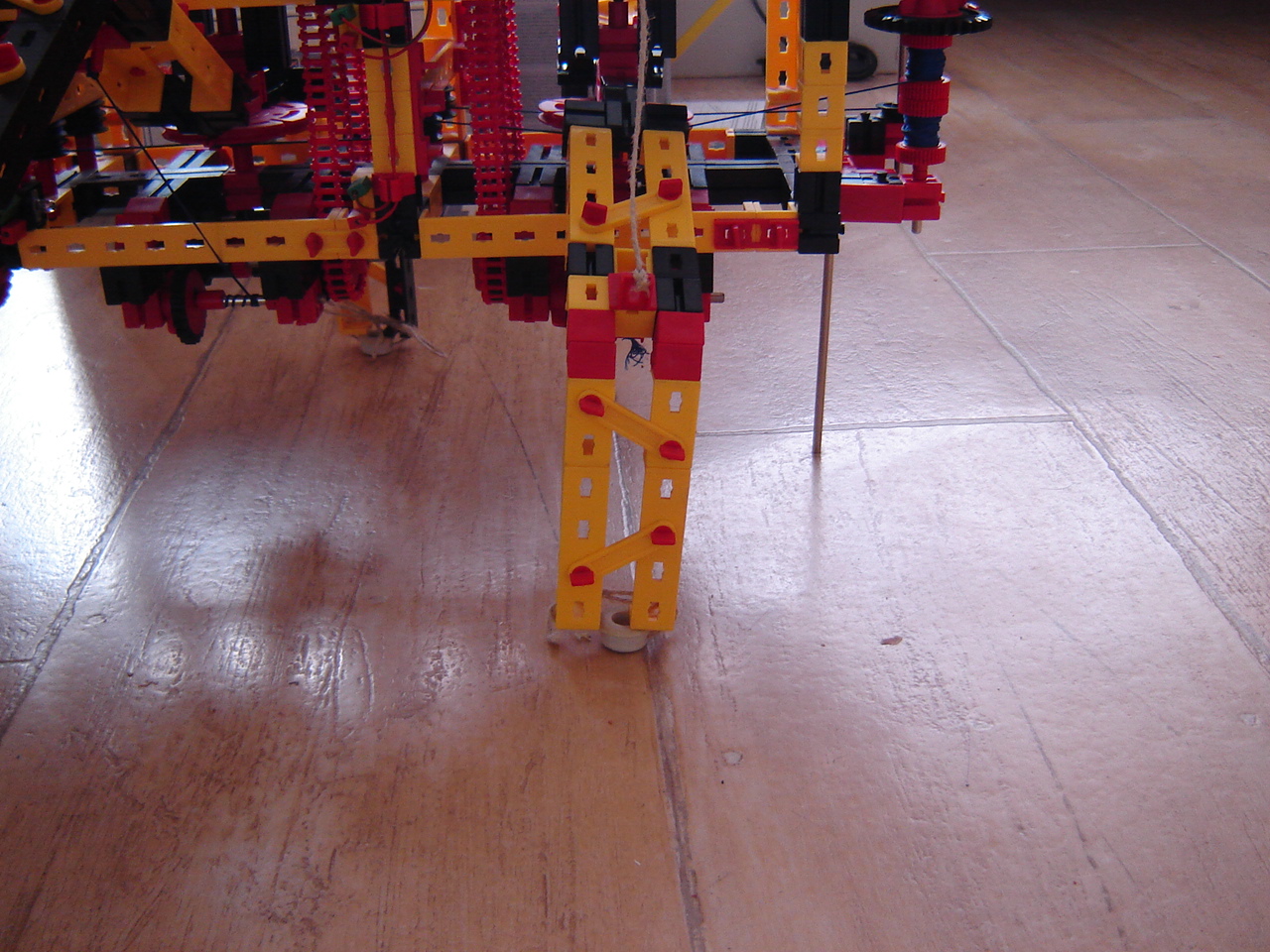
31 Dec 2015: Different solution: supporting rod up front
31 Dec 2015: Different solution: supporting rod in back
31 Dec 2015: Different solution: supporting rod
stabelized
31 Dec 2015: Different solution: supporting rod
stabelized

31 Dec 2015: Different solution: supporting ros on the
floor
8 jan 2016: Different construction for the horizontal
motor (1)
8 jan 2016: Different construction for the horizontal
motor (2)
8 jan 2016: Different construction for the horizontal
motor (3)
8 jan 2016: Yet another construction for the horizontal
motor (1)
8 jan 2016: Yet another construction for the horizontal
motor (2)
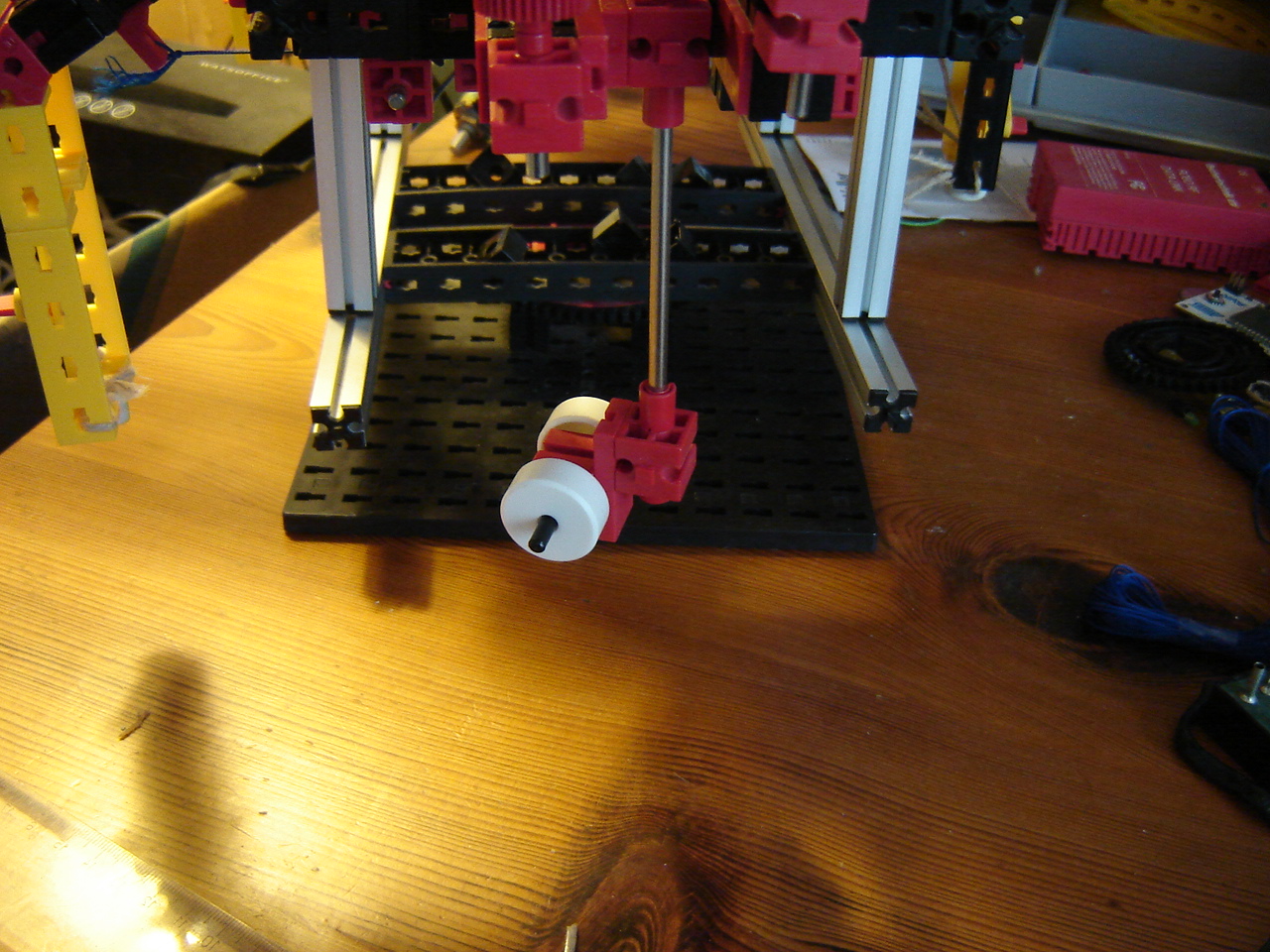
22 Jan 2016: Rubber knob under the to cause some
necessary friction with the surface
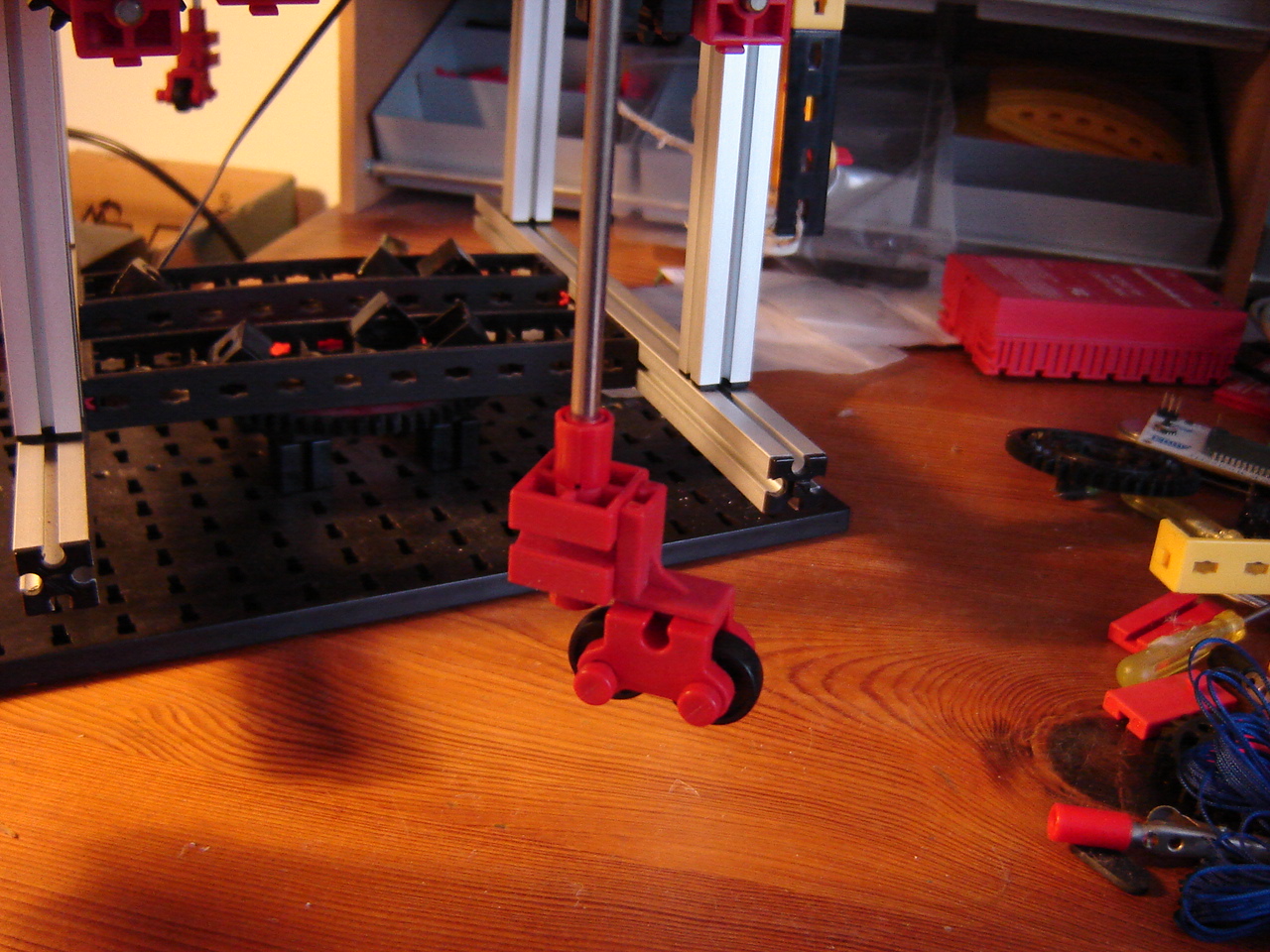
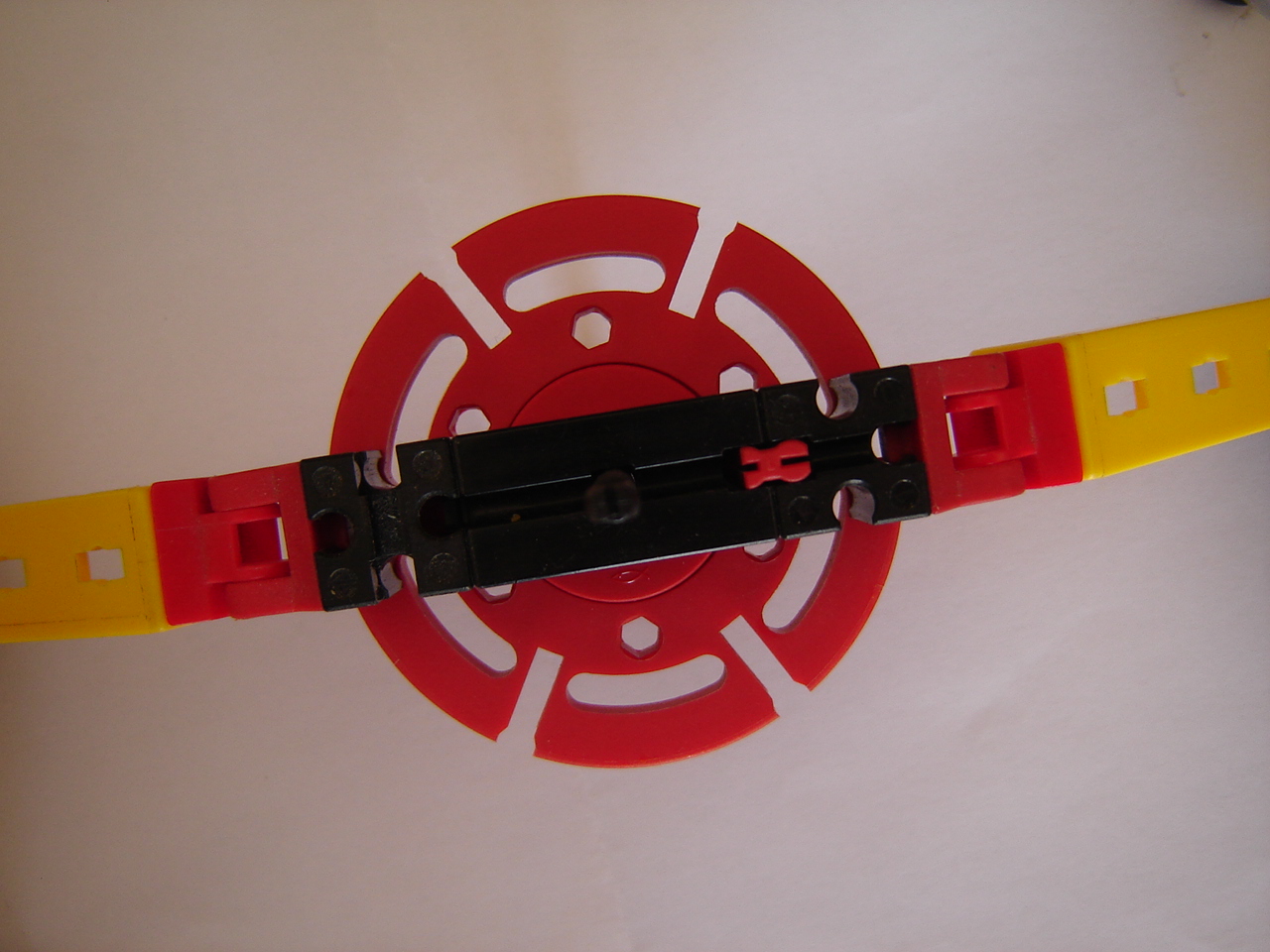
29 Jan 2016: A wheel contruction...
29 Jan 2016: And another wheel contruction...
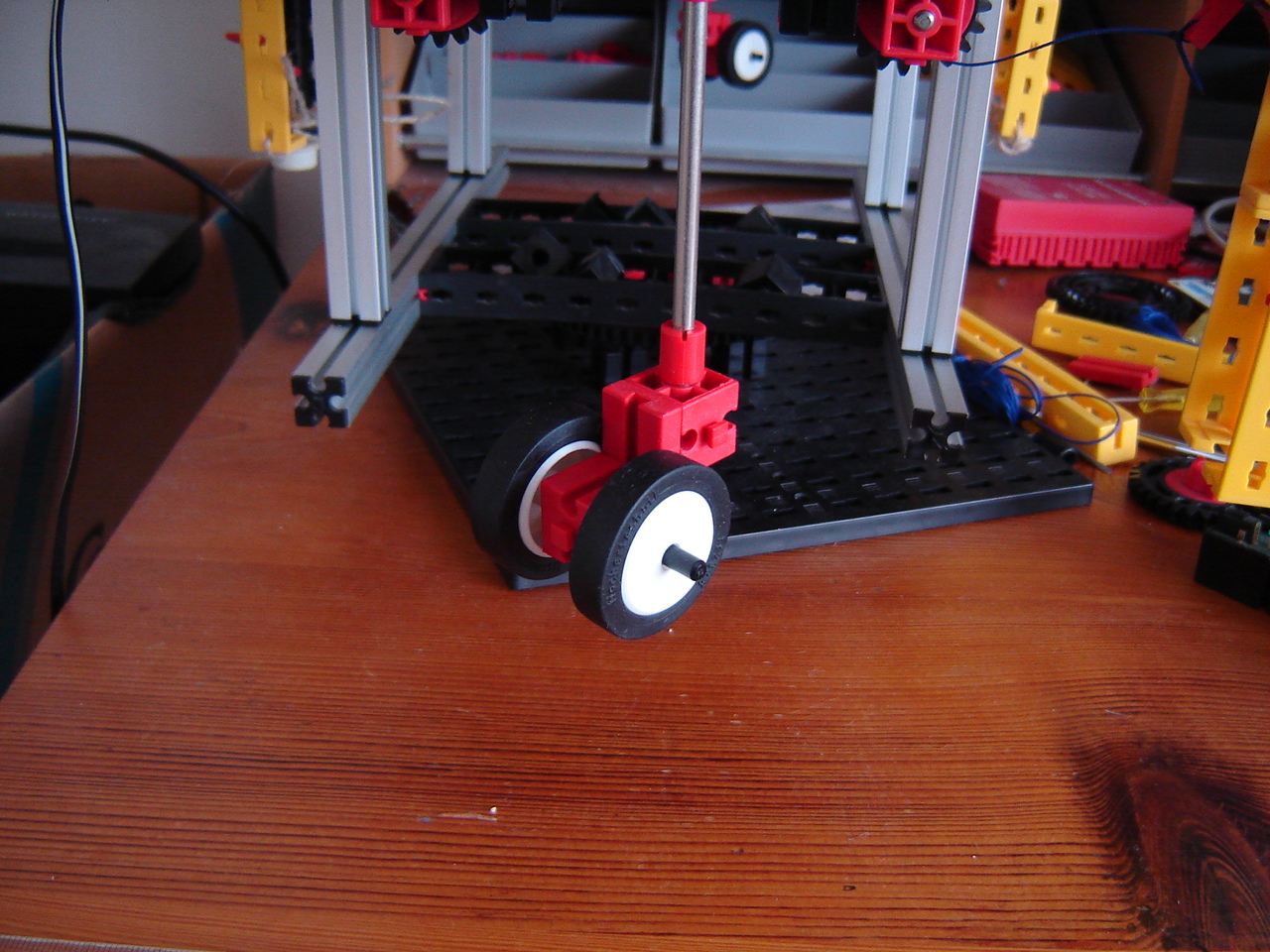
5 Feb 2016: A rubber tire added...
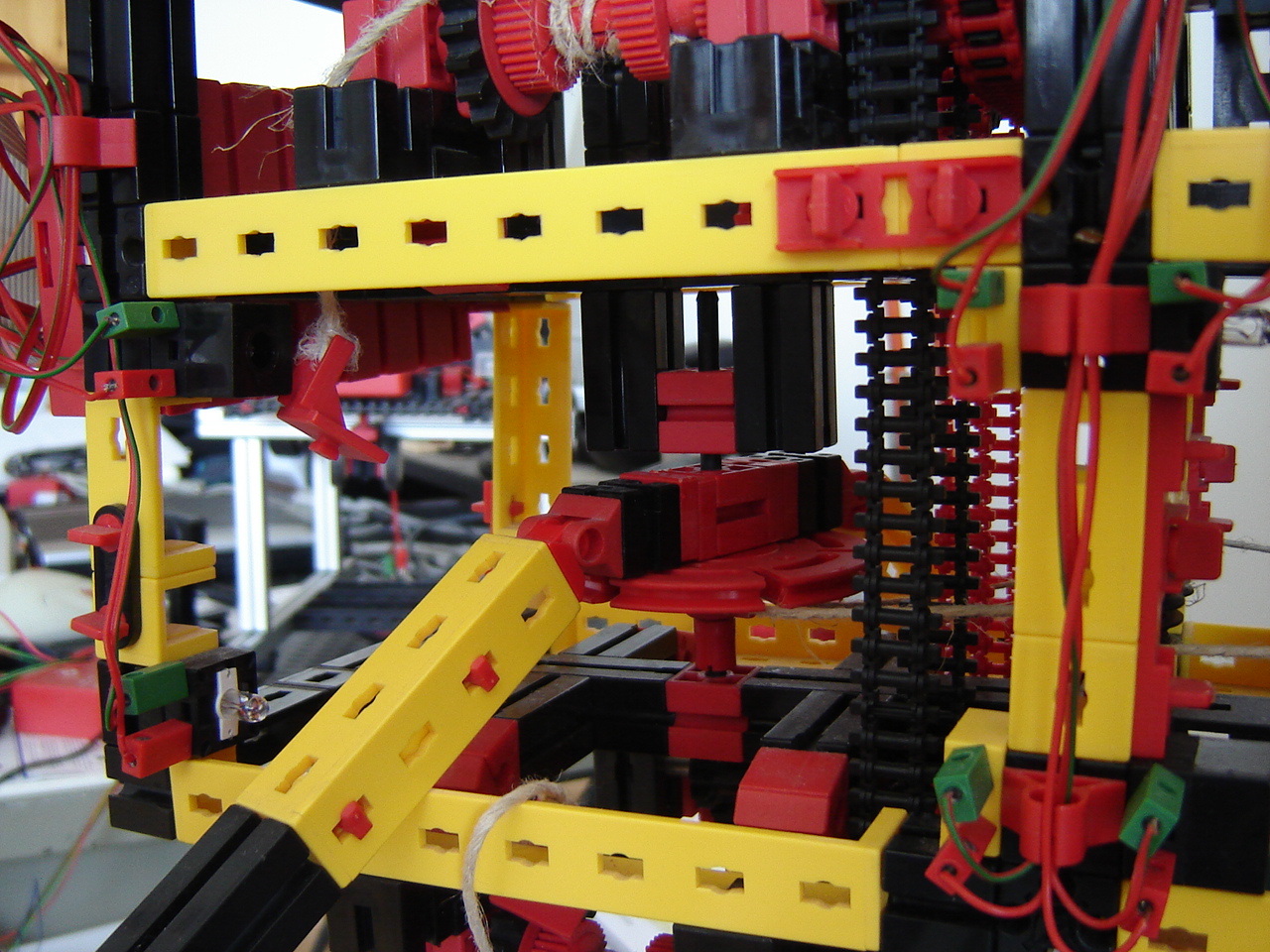
5 Feb 2016: Overview
5 Feb 2016: Floortest. Click the image to watch the
video.
12 Feb 2016: Rewiring of lamps and transistors and
removal of the IO Extension. Click the image to watch the video.
26 Feb 2016: Still from video. Improved algorithm to use
the lights for vertical leg movement. See the video
4 Mar. 2016: Reconstructed hip/leg. Click the image to
watch the video.

11 Mar. 2016: Reconstructed hip. Click the image to watch
the video.
11 Mar. 2016: Reconstructed back winch. Click the image
to watch the video.
18 Mar. 2016: Another (failed) floortest. Click the image
to watch the video.
25 Mar. 2016: Now what to do? Click the image to watch
the video.
1 april 2016: Improved stabilization Click the image to
watch the video.
1 april 2016: Improved stabilization Click the image to
watch the video.
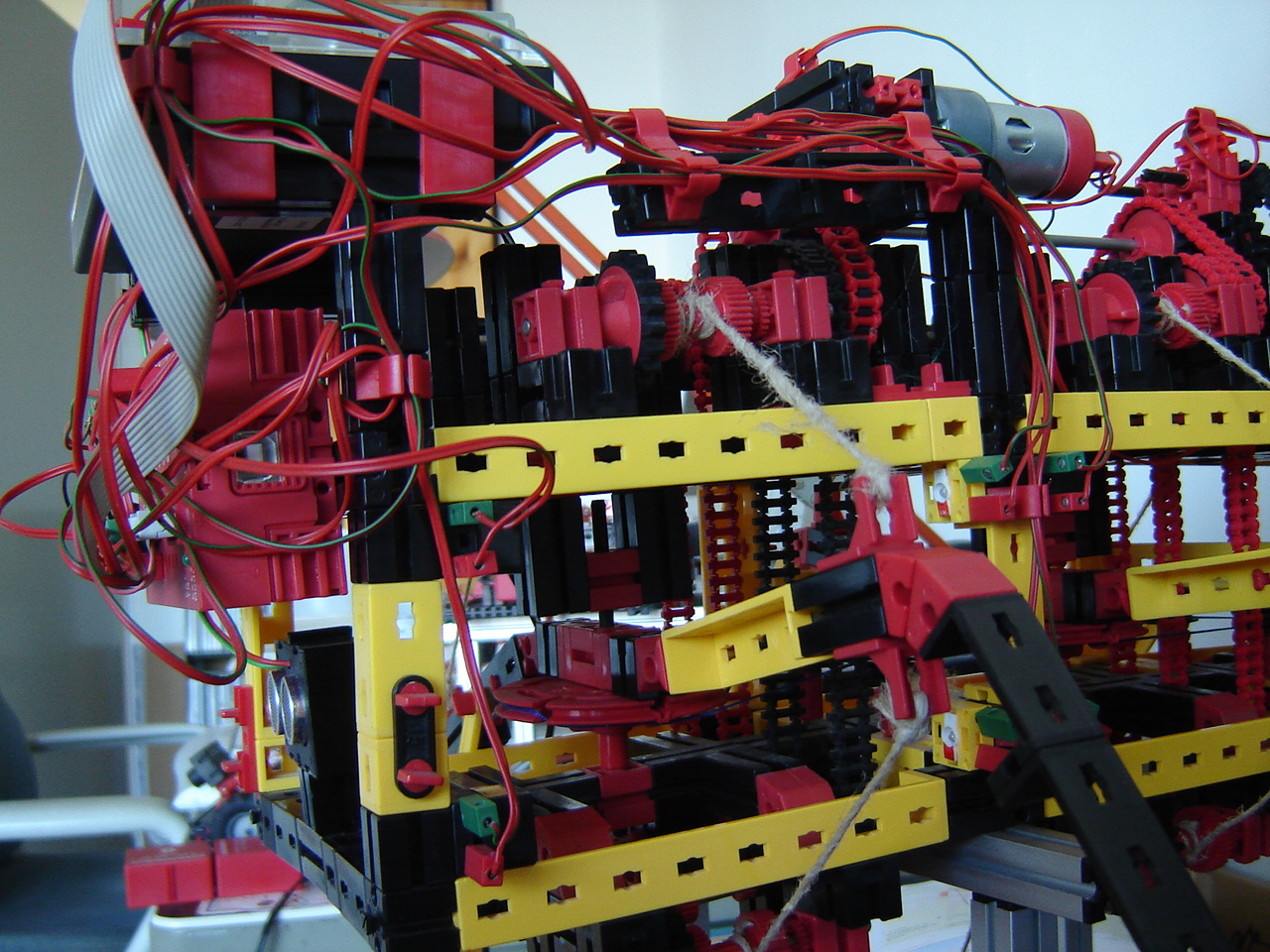
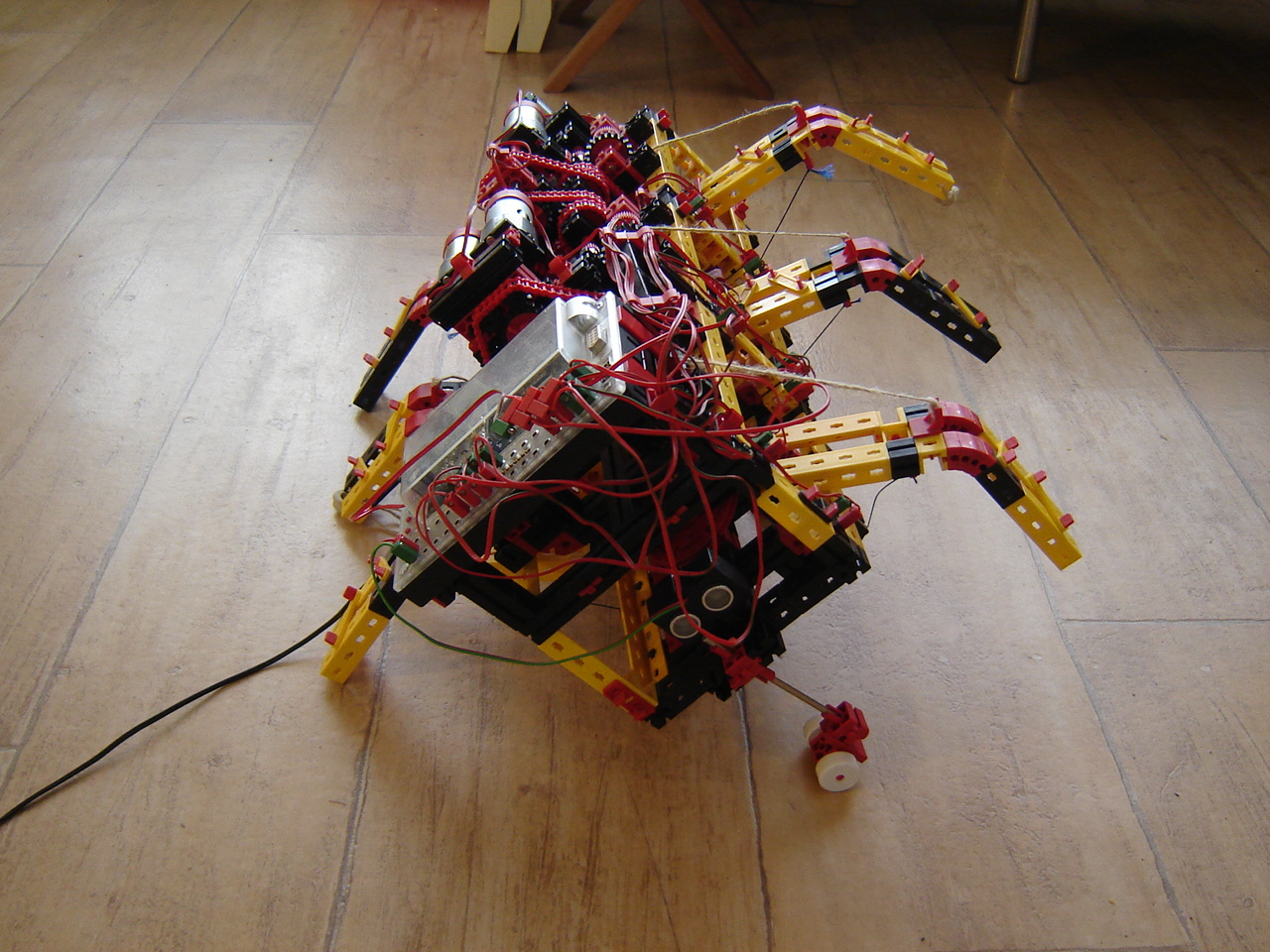
20 april 2016: Final overview (1). Click the image to
watch the video.
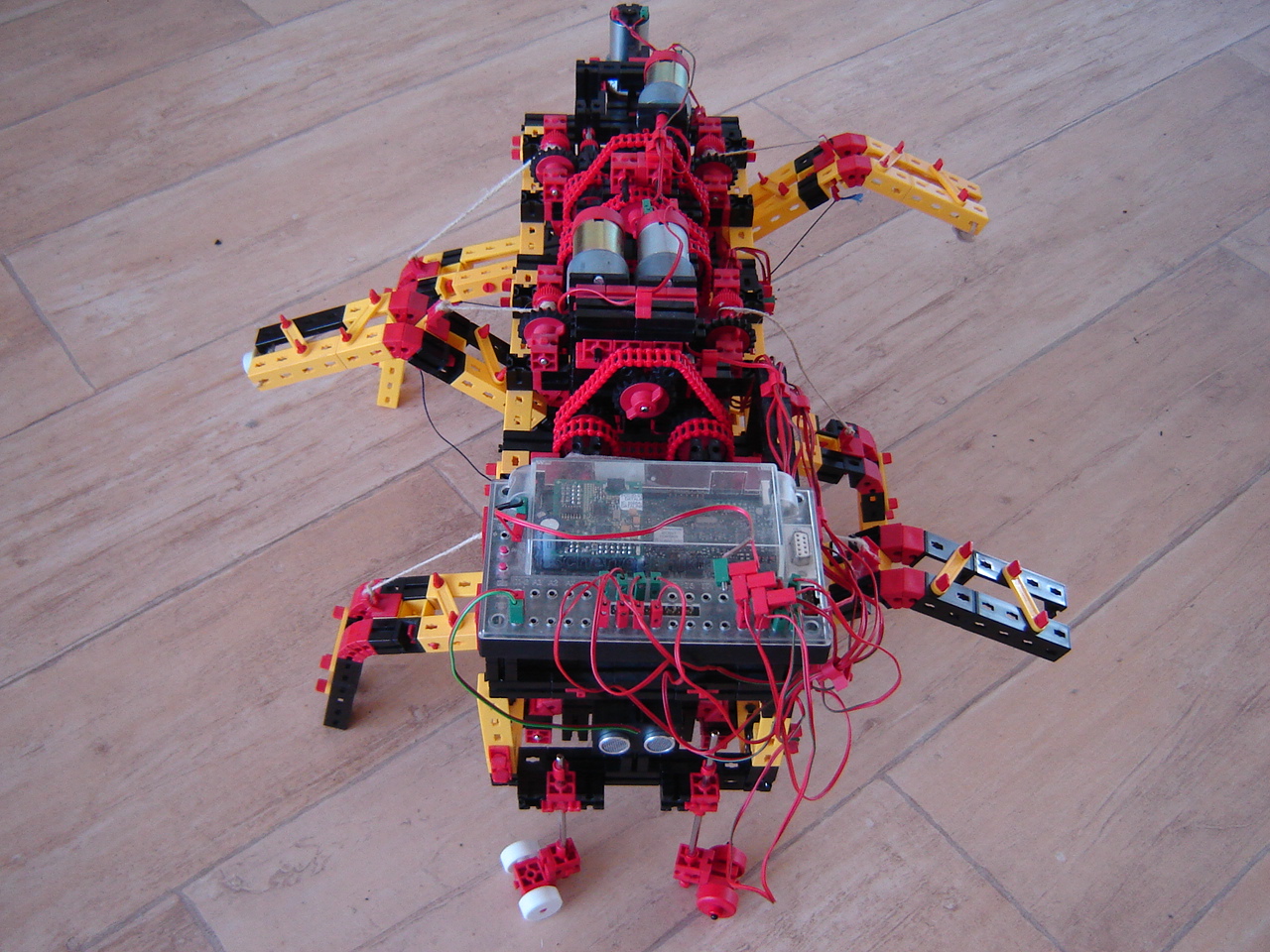
20 april 2016: Final overview (2). Click the image to
watch the video.
20 april 2016: Final overview (3). Click the image to
watch the video.
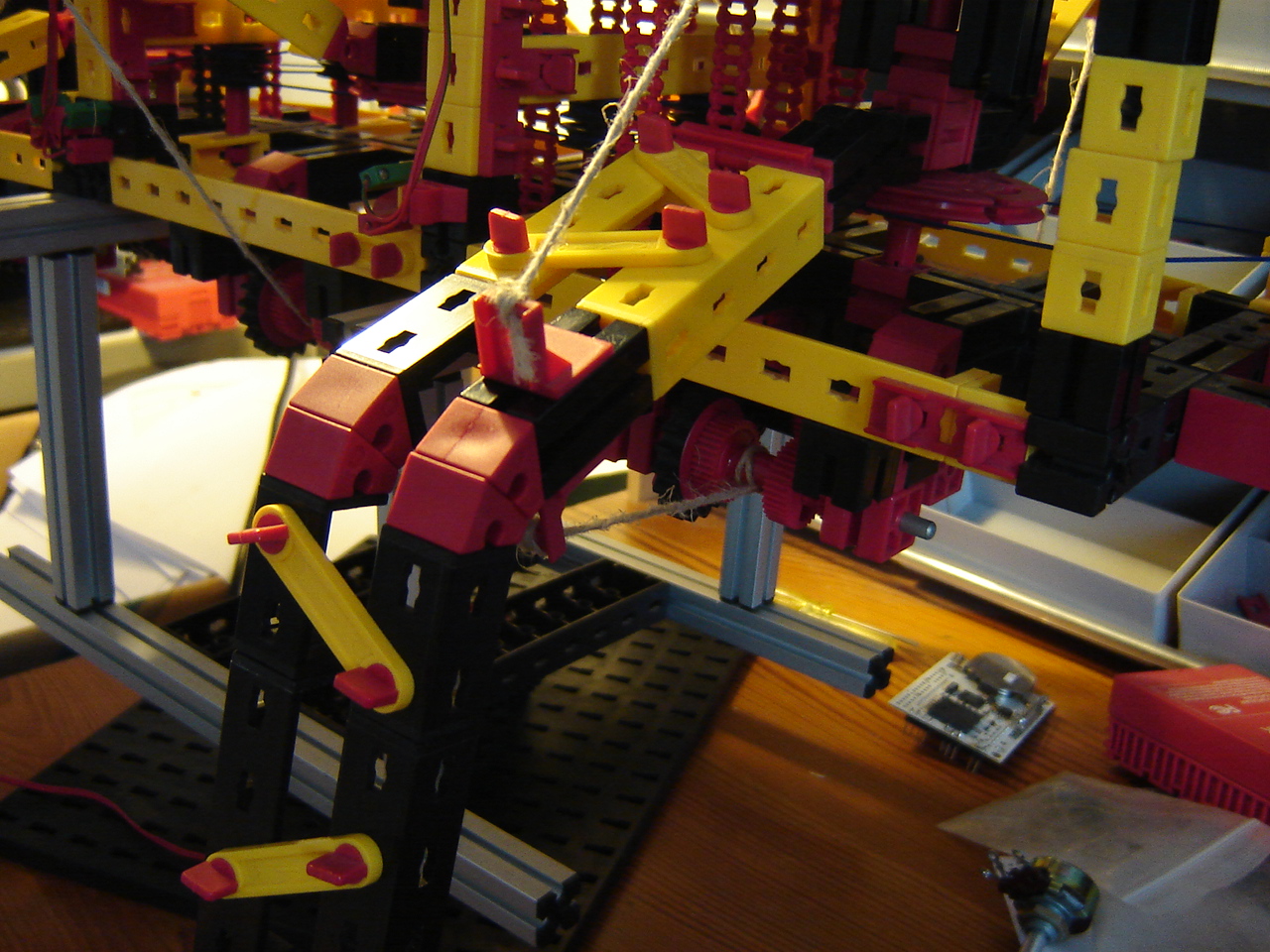
20 april 2016: Final overview (4). Click the image to
watch the video.