Please support this blog by making a (small) donation via PayPal, Ko-fi, BuyMeACoffee or IBAN
OR
Become a member via patron of ko-fi and have your name mentioned on my website and depending on the pledge you make also with my videos.
This is a continuation of a project which started by using the BeagleBoard embedded system, but now uses a laptop.
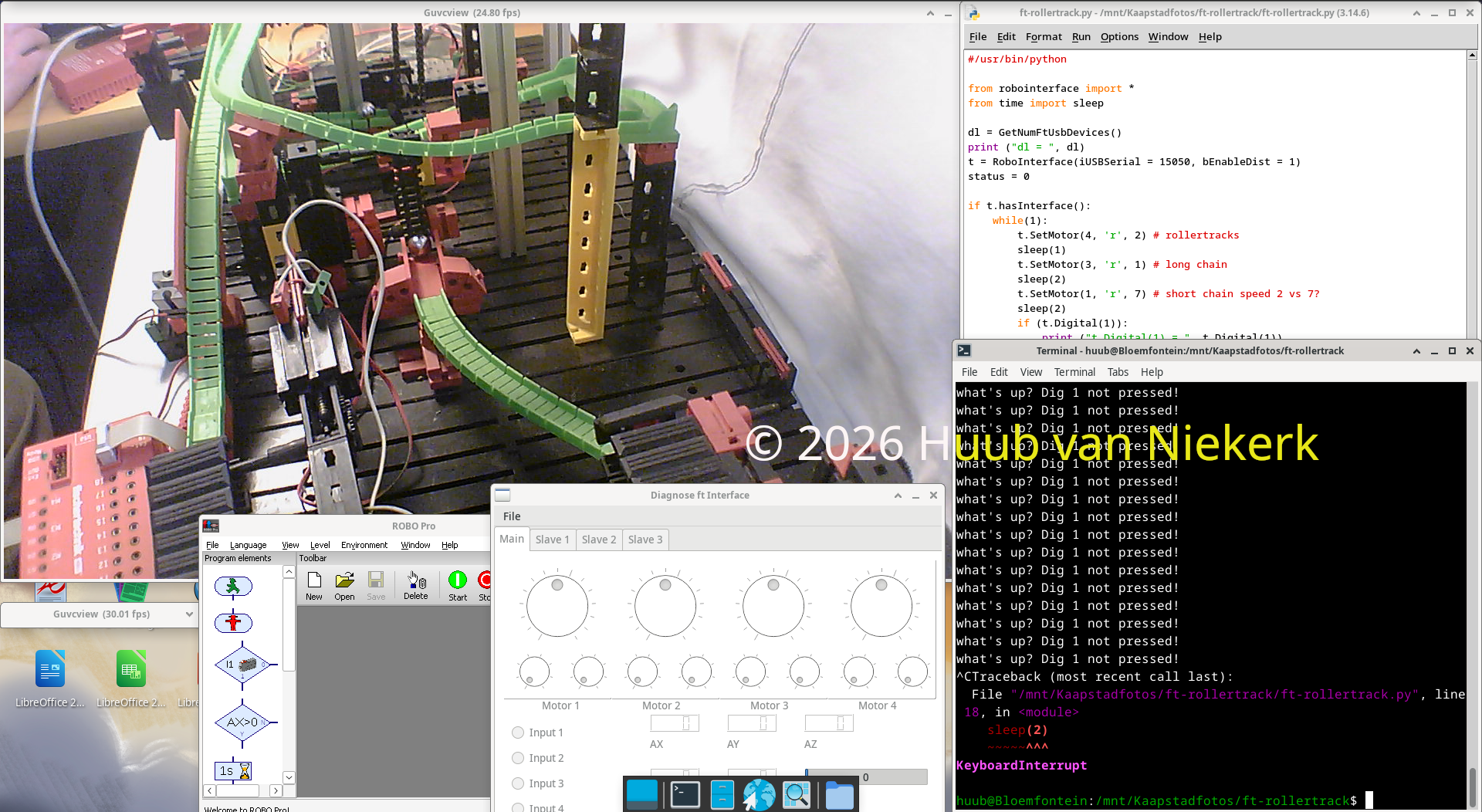
3 July 2026: Focussing on the lower-track chain, I also compare RoboPro with ftdiagnose. With regard to the motor, I find a remarkable solution, but it's not ideal. At all. A test with another motor reveals another option for solution. Patreon and Ko-fi members have access to the full-length video. Click the image to watch the video. See also the blog.
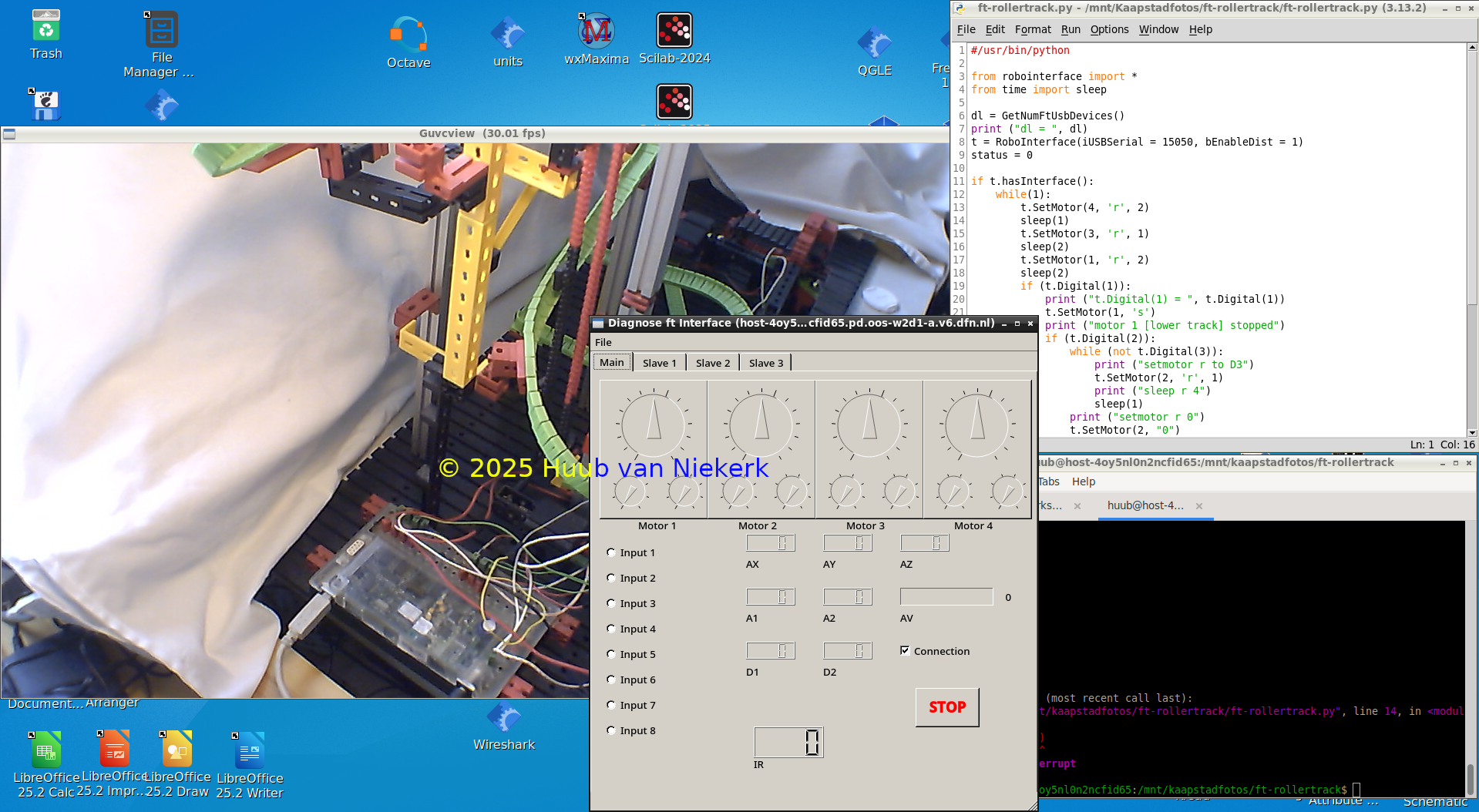
17 April 2026: Using a new laptop, USB problems solved and testing the RF DataLink connection and the lower-track chain motor which keeps giving headaches. Patreon and Ko-fi members have access to the full-length video. Click the image to watch the video. See also the blog.

5 December 2025: With the USB connection problem that I still haven't solved, so still the workaround via ssh. Reconstruction on tracks, finding a speed solution for a chain problem that wasn't there and adding a trackguide. Patreon and Ko-fi members have access to the full-length video. Click the image to watch the video. See also the blog.
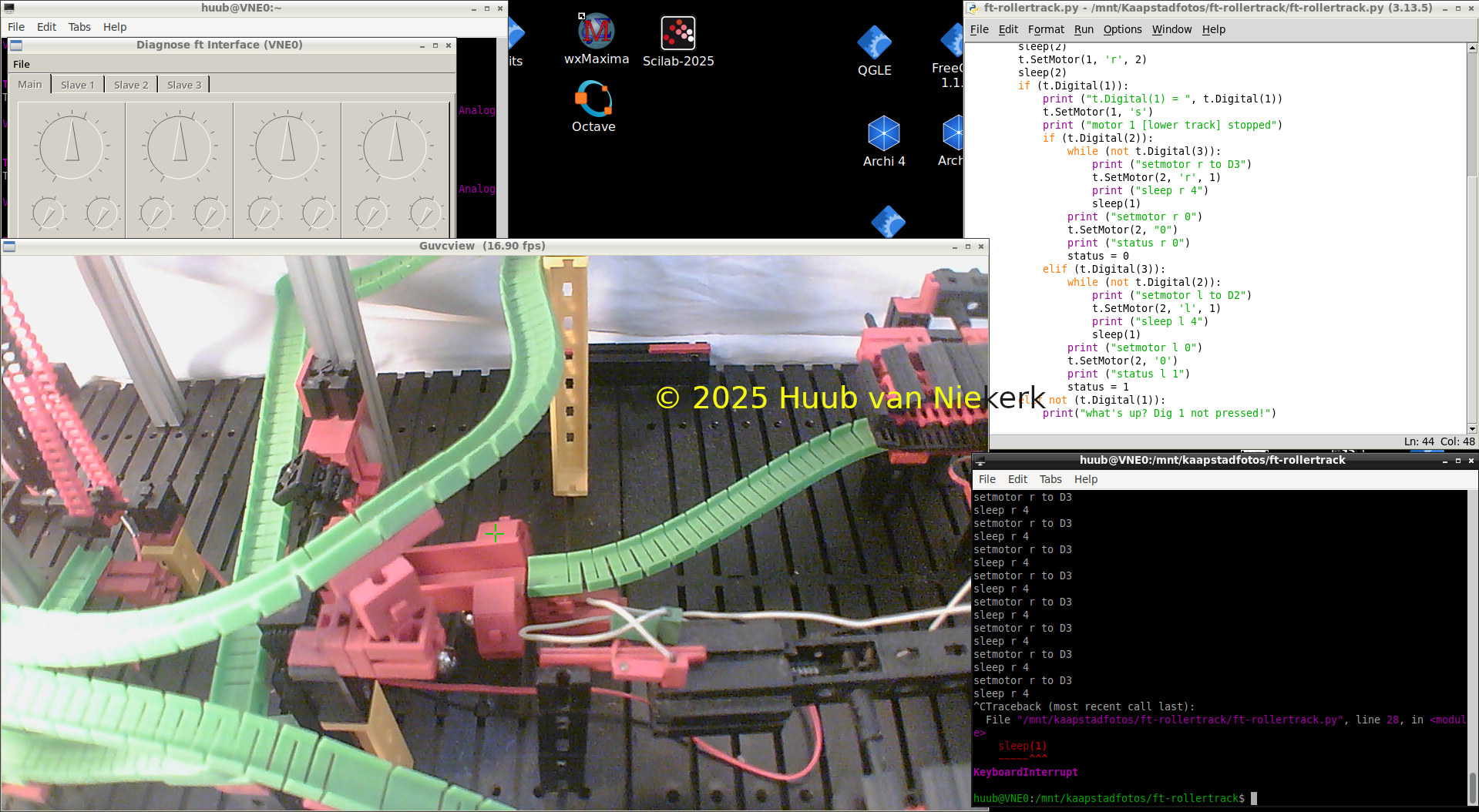
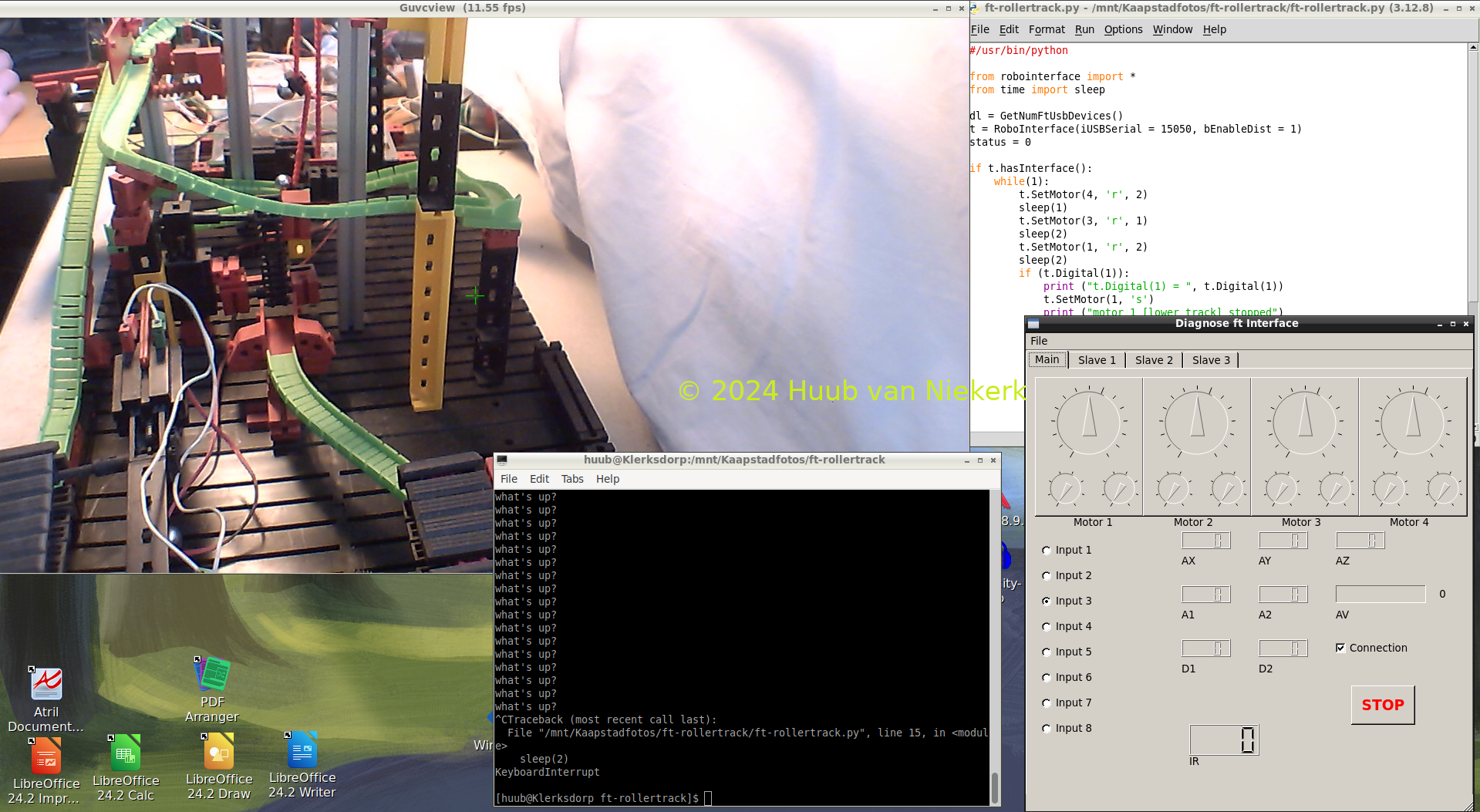
18 July 2025: Things were fixed, but there are still problems. Track parts, rollertracks, motors, angles. And how to finally fix them? That comes after a connection problem with USB that I still haven't solved. Because a ssh solution is no solution. Just a work-around. Patreon en Ko-fi members have access to the full-length video. Click the image to watch the video. See also the blog.
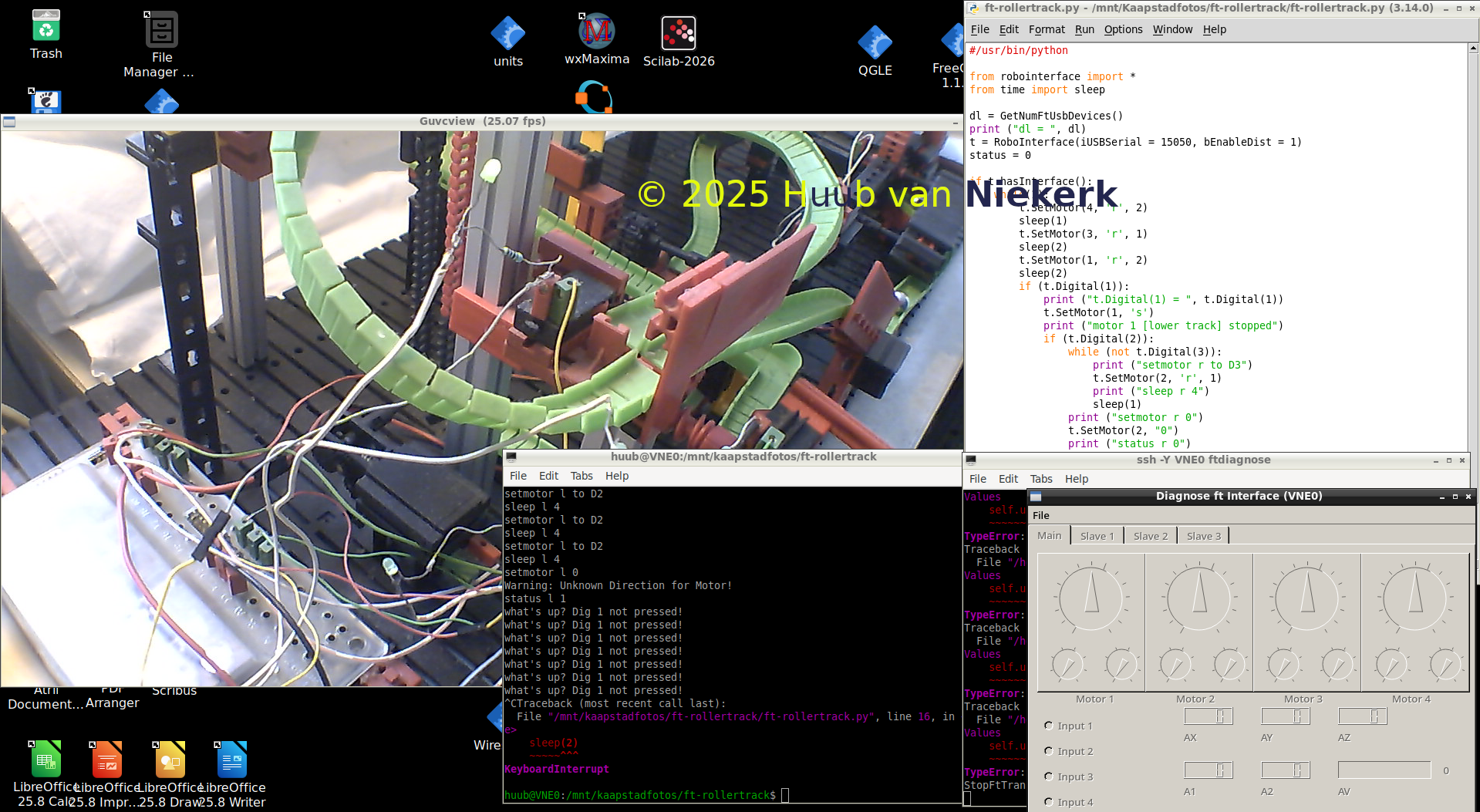
25 April 2025: After last time, things went wrong during storage. So, I have to fix and get it to working state again. But connectivity issues give problems. A temporary solution is found, but why does it go wrong anyway? After that, some model issues remain. Patreon en Ko-fi members have access to the full-length video. Click the image to watch the video. See also the blog.
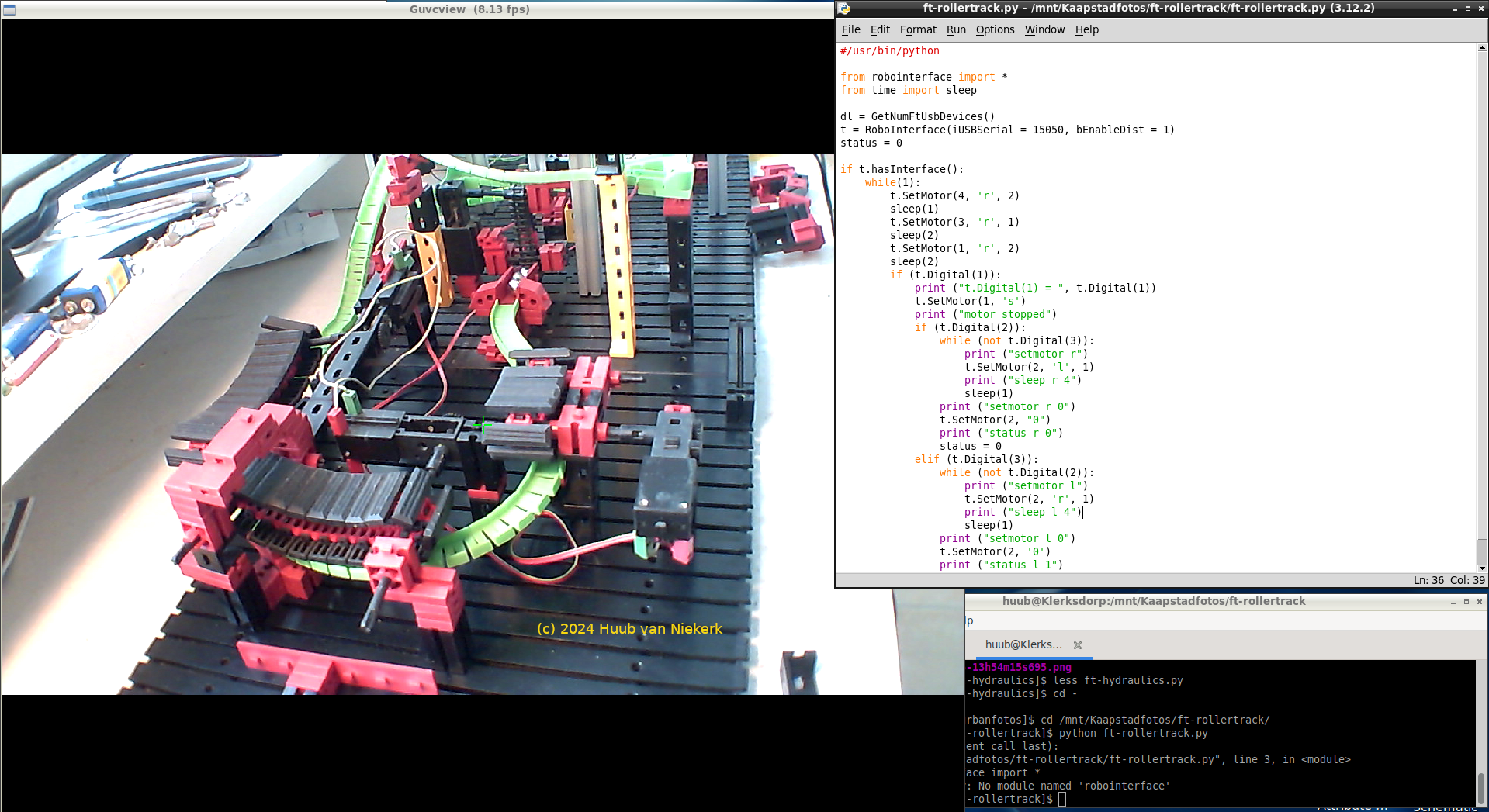
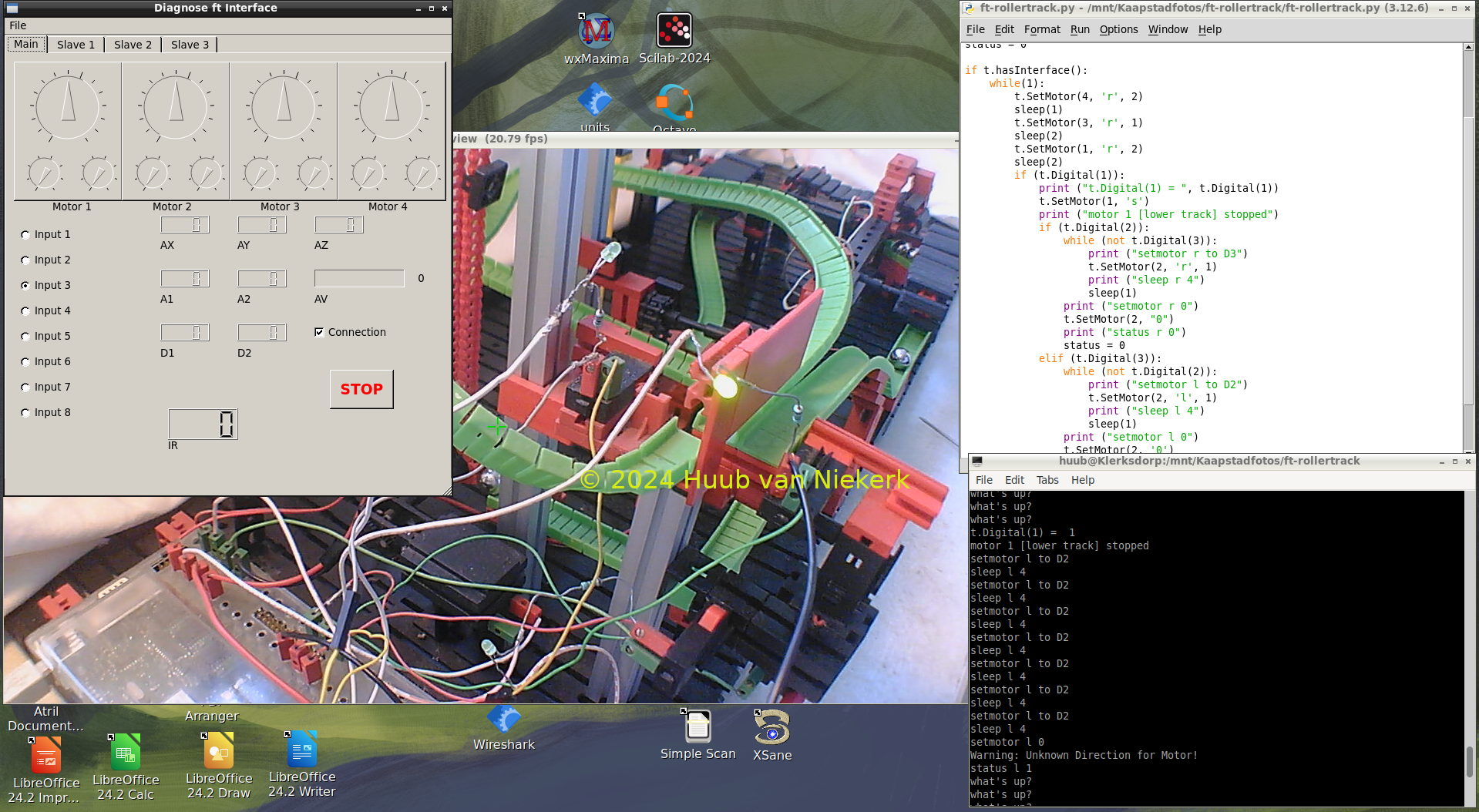
27 December 2024: To check on the track switch, I first have to put it back into its place. Then I find out there's more not going well. Fixing wires and reconstruction for one part and diagnosing for another. Patreon en Ko-fi members have access to the full-length video. Click the image to watch the video. See also the blog.
10 October 2024: Following the reconstruction and wiring of last time, I need to check on the track switch. Then I find out there's more not going well. Fixing wires and code for one part and diagnosing for another. Patreon en Ko-fi members have access to the full-length video. Click the image to watch the video. See also the blog.
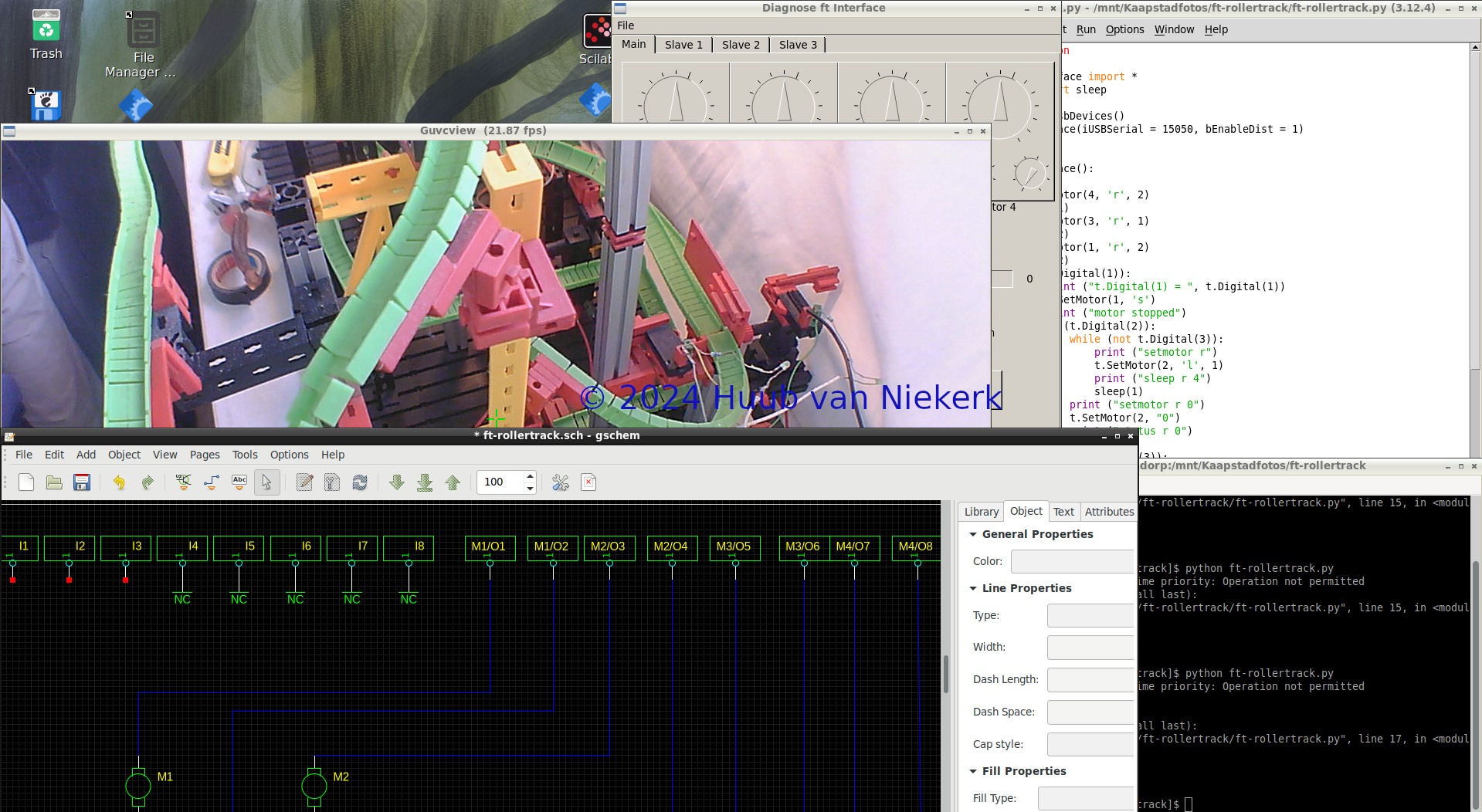
23 August 2024: Following the reconstruction of last time, I need to replace some wires and do some more testing. However, things don't go the way I intend (what's new?) and I need to create the schematics so I know what is what. Patreon en Ko-fi members have access to the full-length video. Click the image to watch the video. See also the blog.
21 June 2024: After a few months, I decide to continue the reconstruction, but also do a full test. The software is working but some parts aren't. Time to figure things out and have new ideas. Patreon en Ko-fi members have access to the full-length video. Click the image to watch the video. See also the blog.
1 March 2024: All dusty and dirty after a long time of unprotected storage, I decide to reconstruct it and leave the BeagleBoard controller. And where's the software? Right.. Click the image to watch the video. See also the blog.